
Application of Deep Learning to Identify Flutter Flight Testing Signals Parameters and Analysis of Real F-18 Flutter Flight Test Data




Abstract
1. Introduction
2. Scope and Limitations
- Preliminary viability analysis. The resources available to the authors to train networks are limited, and therefore a small-scale model has been presented. This factor affects the number of networks that were trained and the characteristics of the inputs and outputs.
- Limited number of modes. Although it is possible to generate an unlimited number of signals with any number of modes, each new mode introduces at least four new parameters, and therefore the number of different combinations increases exponentially with the power of 4. While it is not uncommon to see interactions of three different modes in real flutter flight tests, this analysis will take into consideration the simplest case of two different modes. However, note that the model is not limited by the nature of the interacting modes, meaning that the modes do not need to be perfectly orthogonal for the analysis to yield useful results.
- Real data parameters are not validated. The F-18 signals were acquired during flutter flight tests from a real source. However, data on the estimated parameters, airspeeds, or altitudes were not provided either before (preparation) or after (analysis) the tests. This imposes a strong limitation on the metrics available for real data analysis, allowing only a plot of real vs. reconstructed data to be used.
3. Materials and Methods
3.1. Input Layer
3.1.1. MLP-Based Networks Input Layer
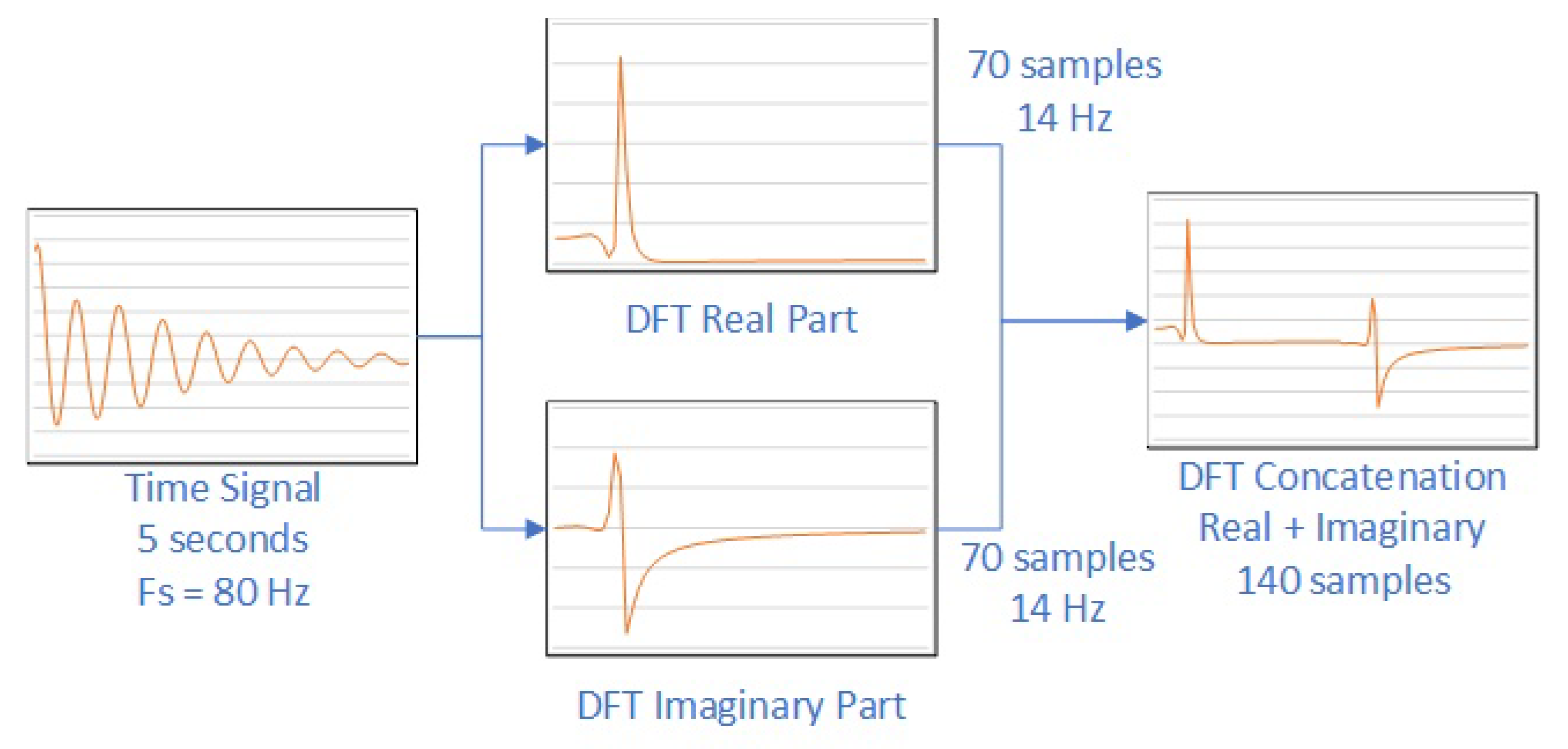
- A Discrete Fourier Transform (DFT) is applied to the time-domain signal, and the real and imaginary parts are separated.
- From each subset, 70 frequency samples are extracted (corresponding to a maximum frequency of 14 Hz if 5 s signals are used).
- The positive frequency components of both the real and imaginary parts of the DFT are then concatenated.
3.1.2. CNNs Input Layer
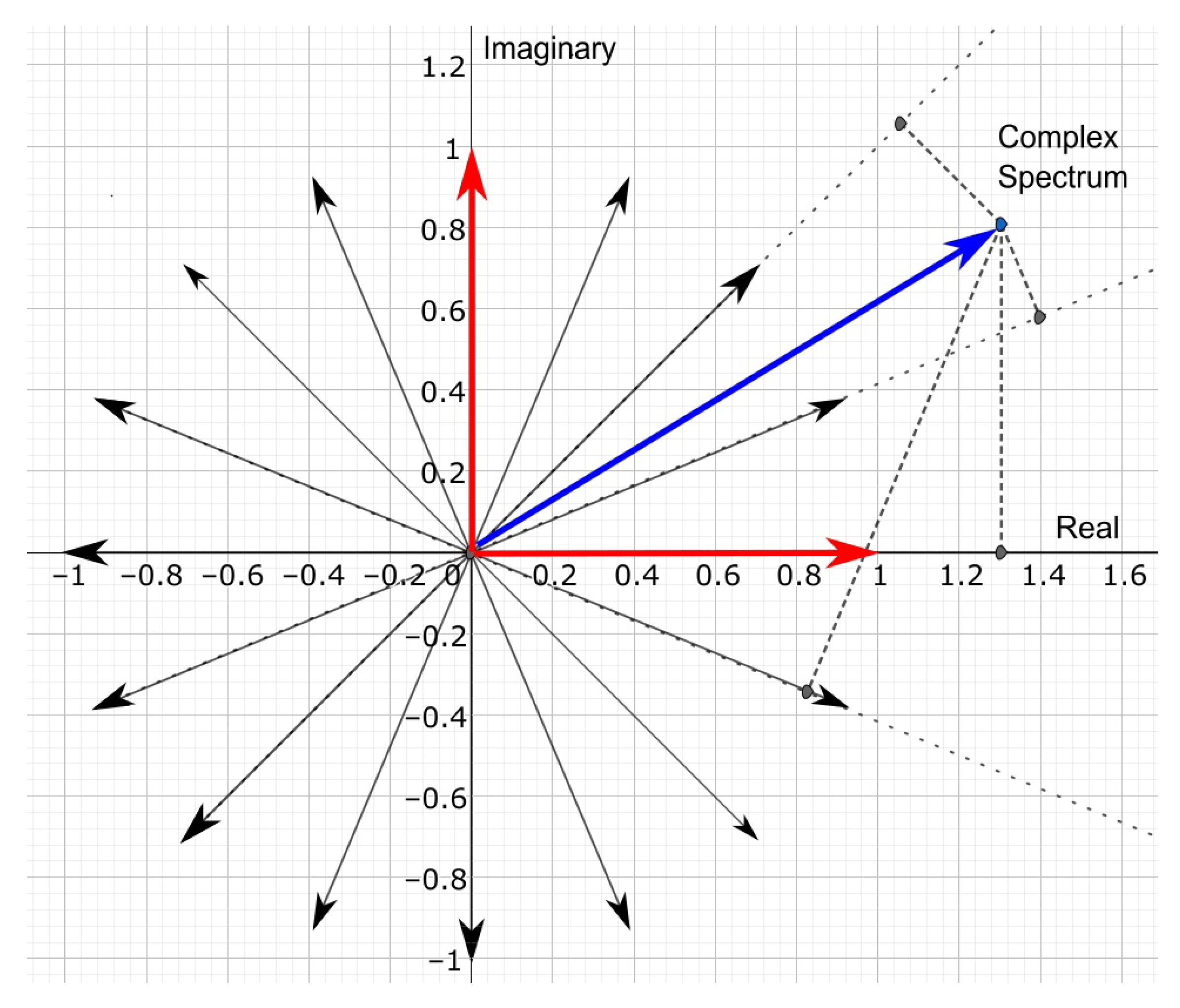
- Define a list of unitary vectors on the complex plane, which will constitute the basis for a vector space , defined by a set of vectors . Each vector is calculated as:where k is the index of the vector, K is the total number of vectors (in this application, , which includes 14 unitary vectors, along with the real part and the imaginary part), and represents the frequency data points. These vectors are equally distributed around the unit circle in the complex plane. Refer to Figure 2 for visualization.
- Trim the original time series signal to 5 s samples, or apply zero-padding until 5 s of signal are reached.
- Calculate the DFT of the time series. The result is a vector with 200 elements defined on the base B.
- Select the first 70 data points, which correspond to a maximum frequency of 14 Hz.
- Project each frequency vector onto the vector space defined in step 1 above. The projection values will be used to introduce redundancy, and the 16 projection values will constitute the rows of the input matrix. See Figure 2.
3.2. Output Layer
3.3. Networks Design
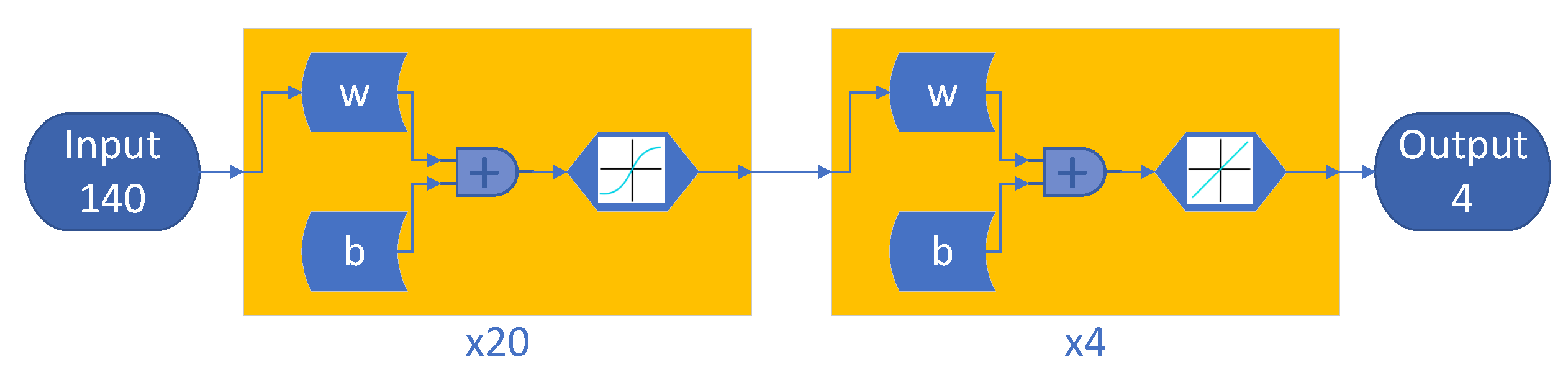
3.3.1. Multi-Layer Perceptron Design
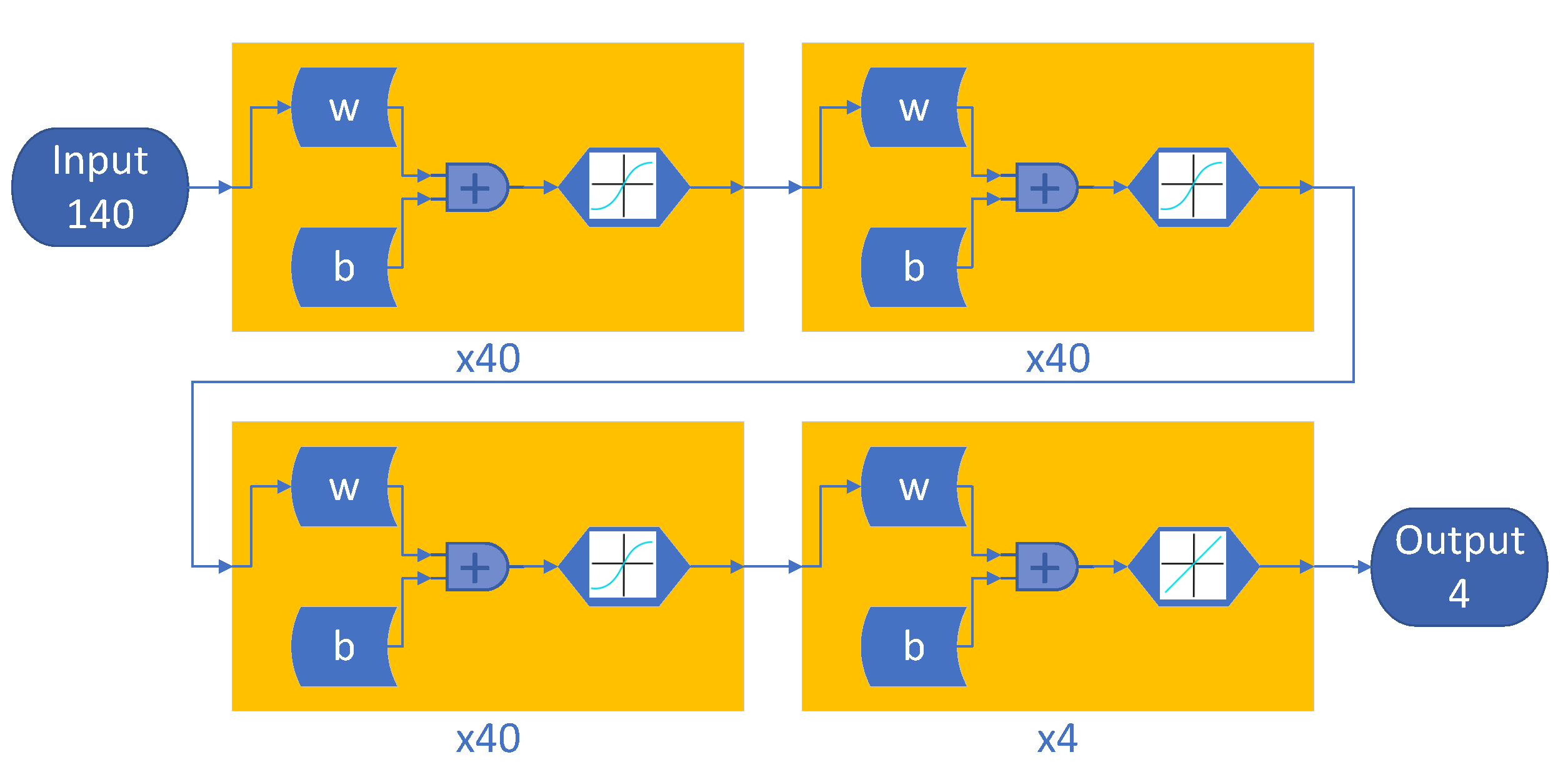
3.3.2. Deep Neural Networks Design
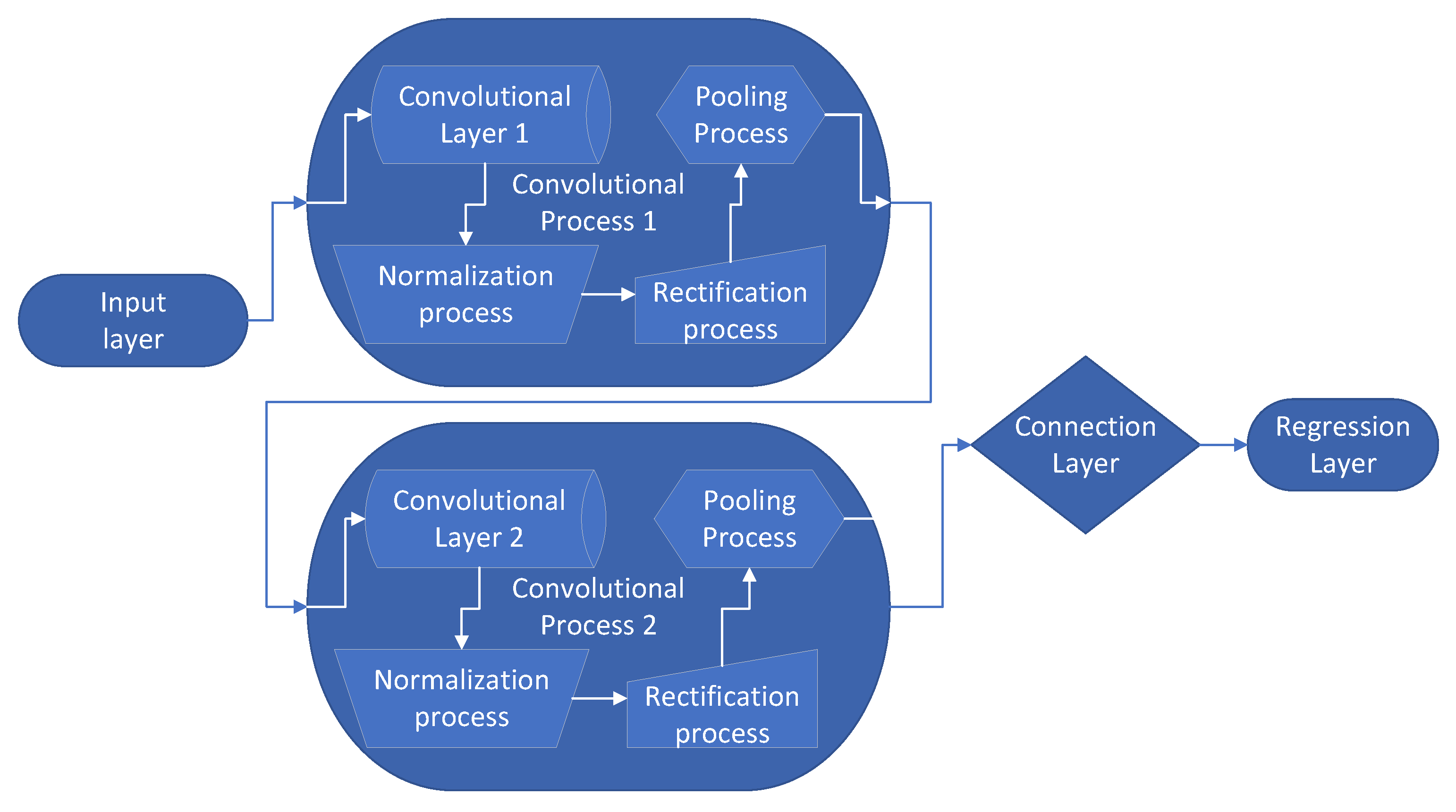
3.3.3. Convolutional Neural Networks Design
- Input Layer. The inputs are matrices for each dataset, which are formatted to represent a regular pattern, typically an image. In our case, the input is a data matrix as described in Section 3.1.2. So, the input layer will consist of neurons.
- Convolutional process. Each convolutional process, depicted in Figure 5 as an elliptic box, includes a convolutional layer followed by several processes to improve operational performance:
- (a)
- Convolutional Layer. This layer performs the convolution operation on the input matrix using the weights matrix.
- (b)
- Normalization Process. This step normalizes the outputs to control their range and prevent saturation. A bias is added and a multiplier is applied, both of which are adjusted during training.
- (c)
- Rectification Process. This step converts negative values to zero.
- (d)
- Pooling Process. The convolutional matrices are downsampled using smaller windows.
- Connection Layer. This layer connects and reduces all outputs from the final convolutional block to the four output parameters. It functions as a classical perceptron layer, collecting outputs from the convolutional layers and generating outputs for the regression problem.
- Regression Layer. Before returning the final parameters, a regression layer is applied to optimize the outputs.
3.4. Training Process
- CPU: The CPU used was an AMD Ryzen 9 5950X 16-Core 3.4GHz.
- Memory: The workstation had 128 GB of RAM.
- GPU: The GPU used was an NVIDIA RTX 2090 with 24 GB of memory.
- MLPs: ≈2500 s;
- DNNs: ≈9000 s;
- CNNs: ≈11,000 s.
- Signal Ranges: The limited range of frequencies is due to the preliminary nature of this study. A broader range of frequencies, representative of the frequencies found in the real data available, will be employed in future papers, possibly including a different network design.
- Dampings Upscaling: The dampings were upscaled by a factor of 15 to reach a range of values in the same order of magnitude as the rest of the parameters. The upscaling was applied in the following manner. The training dataset was created with the actual damping values, but during the backpropagation process, the output damping values provided were upscaled. The formula employed is as follows:After the estimation is finished, the damping results will need to be adjusted inversely using the same scaling factor.
3.5. Analysis Methodology
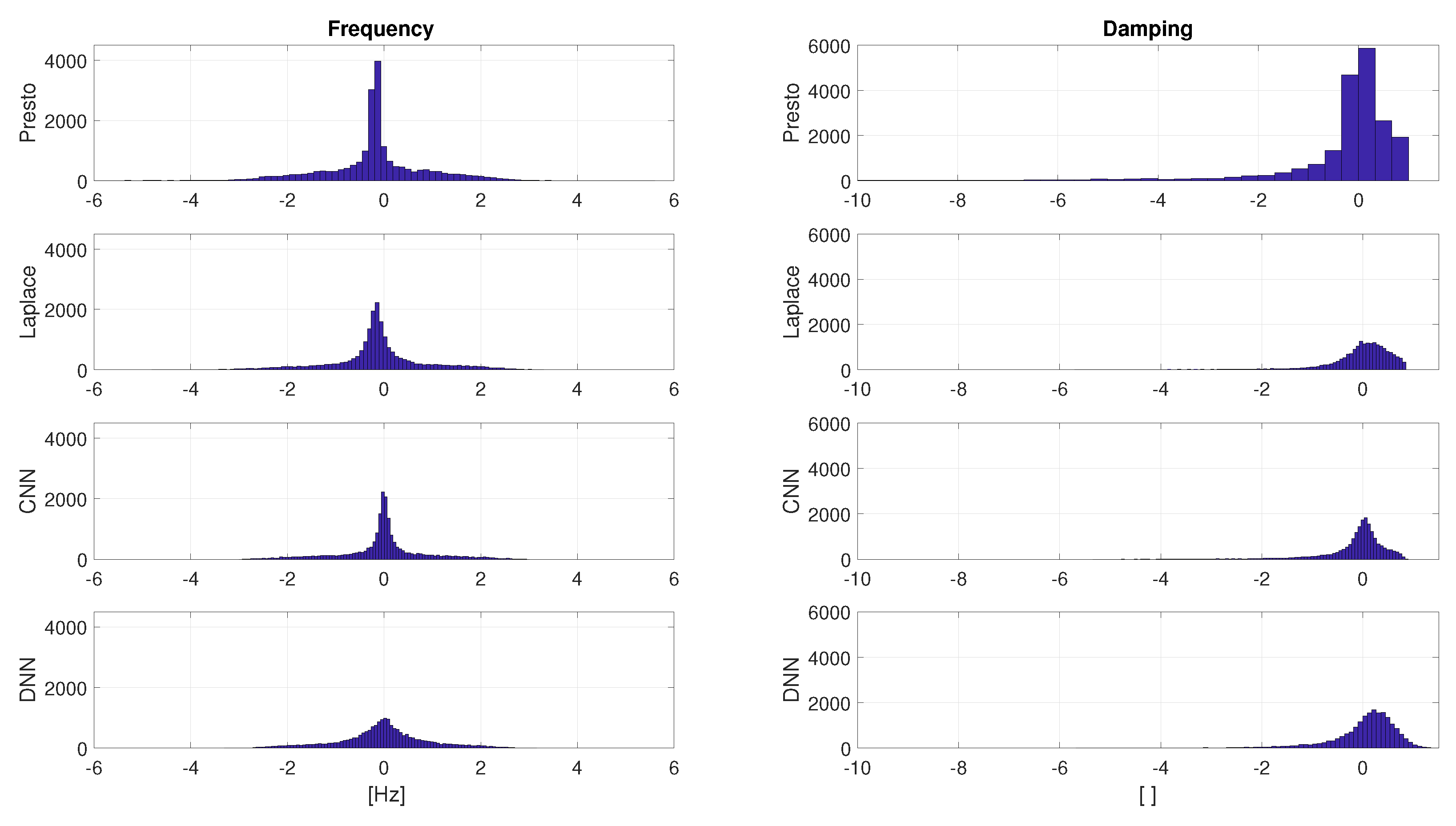
- Synthetic data processing: A set of 10,000 synthetic signals dataset was created with known parameters and no noise addition. Taking this dataset as a baseline, and following the same approach as with the training dataset, 5 dB SNR white noise was added. The synthetic process measured the standard deviations of errors in parameters (frequency and damping), skewness, kurtosis, and histograms of errors.
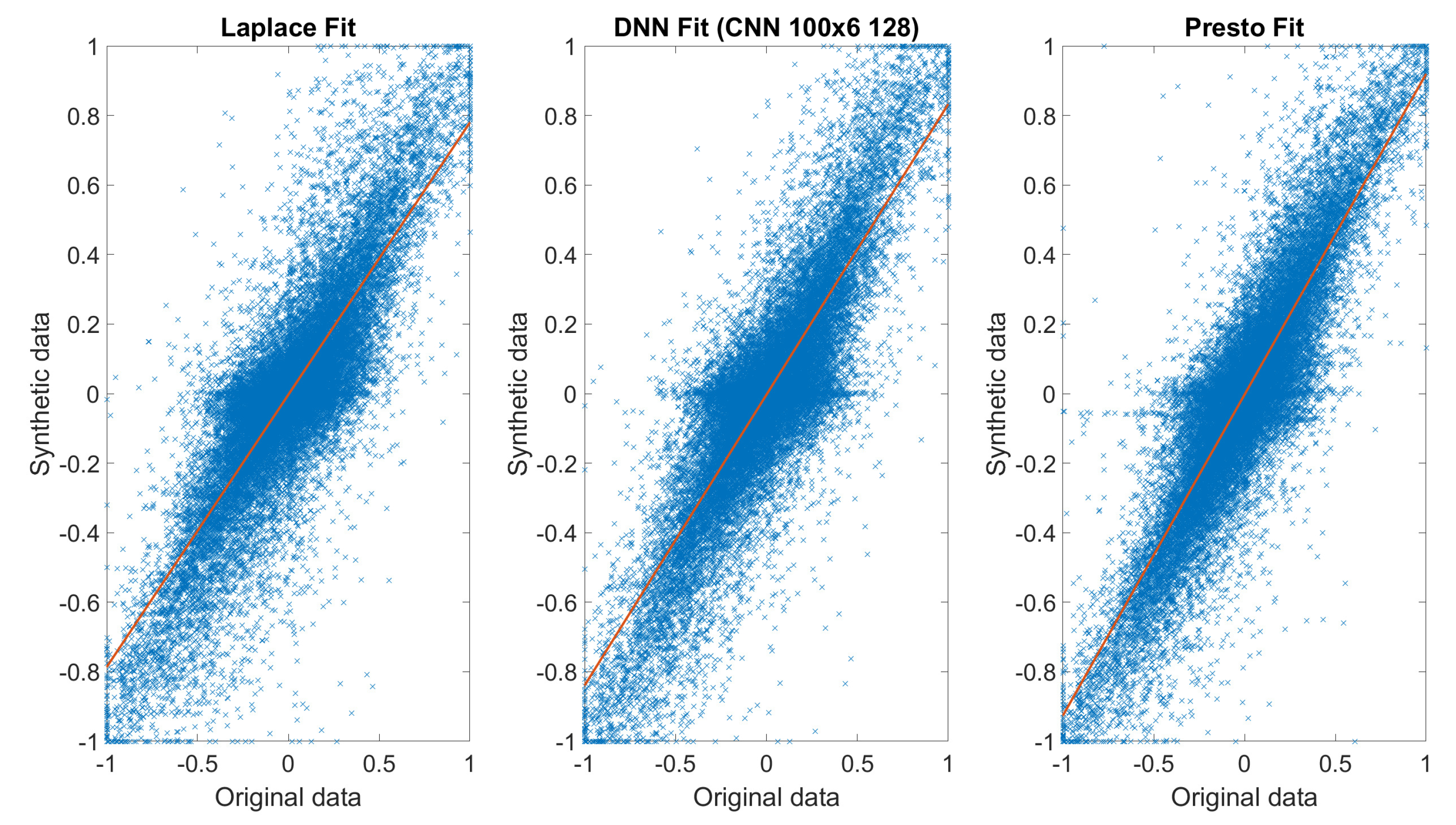
- Real data processing: A set of real data from F-18 flutter tests was employed. The datasets were analyzed using all the previously described techniques (PRESTO, Laplace Wavelet Matching Pursuit, and all the deep learning models). The data were reconstructed using Equation (1) with the estimated parameters, and the results of the original vs. reconstructed data were plotted. From there, the Mean Square Error (MSE), the Mean Absolute Error (MAE) and the Maximum Absolute Error (MaxAE), along with the regression coefficients (, slope, and y-intercept) were compared. The networks employed were trained with the synthetic datasets. It would be possible to use networks trained with real datasets. However, in absence of truth source parameters data, only an estimation on the parameters can be made. The techniques used to estimate those signals parameters were employed also to compare the performance of the networks. Consequently, training with real data would introduce a bias in the results.
4. Results
4.1. Synthetic Data Processing
4.2. Real Data Processing
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two-Dimensional |
| CLAEX | Centro Logistico de Armamento y Experimentacion (as Spanish acronym) |
| CNN | Convolutional Neural Network |
| dB | Decibel |
| DFT | Discrete Fourier Transform |
| DL | Deep Learning |
| DNN | Deep Neural Network |
| Hz | Hertz |
| Kurt. | Kurtosis Coefficient |
| m | Slope of the Regression Curve |
| MAE | Mean Absolute Error |
| MaxAE | Maximum Absolute Error |
| MLP | Multi-Layer Perceptron |
| ms | Milliseconds |
| MSE | Mean Square Error |
| n | y-intercept of the Regression Curve |
| ODE | Ordinary Differential Equation |
| PRESTO | Power Spectrum Short Time Optimization |
| Skew. | Skewness Coefficient |
| SNR | Signal-to-Noise Ratio |
| SSI | Stochastic Subspace Identification |
| Std. | Standard Deviation |
| SVD | Singular Values Decomposition |
References
- Airworthiness Certification Criteria; Technical Report MIL-HDBK-516C; DoD: Arlington, VR, USA, 2014; Available online: http://everyspec.com/MIL-HDBK/MIL-HDBK-0500-0599/MIL-HDBK-516C_52120/ (accessed on 8 January 2025).
- EASA. CS-25. Certification Specifications and Acceptable Means of Compliance for Large Aeroplanes. Available online: https://www.easa.europa.eu/en/downloads/136622/en (accessed on 8 January 2025).
- Norton, J.W. Structures Flight Test Handbook; Technical Report AFFTC-TIH-90-001; USAF Test Pilot School: Edwards, CA, USA, 1990; Available online: https://apps.dtic.mil/sti/pdfs/ADA257262.pdf (accessed on 8 January 2025).
- Formenti, D.; Richardson, M. Paramenter Estimation from Frequency Response Measurements Using Rational Fraction Polynomials. In Proceedings of the 1st IMAC Conference, Orlando, FL, USA, 8–10 November 1982; pp. 1–15. [Google Scholar]
- Formenti, D.; Hill, M. Paramenter Estimation from Frequency Response Measurements Using Rational Fraction Polynomials (Twenty Years of Progress). In Proceedings of the 20th IMAC Conference, Los Angeles, CA, USA, 4–7 February 2002; pp. 373–382. [Google Scholar]
- Coll, F. JFlutter Real Time Flutter Analysis in Flight Test. In Proceedings of the SFTE-EC, SFTE, Nuremberg, Germany, 10–12 May 2016. [Google Scholar]
- Peeters, B.; Van des Auweraer, H. PolyMAX A Revolution in Modal Parameter Estimation. In Proceedings of the 1st international Operational Modal Analysis Conference, Copenhagen, Denmark, 26–27 April 2005; pp. 1–13. [Google Scholar]
- Peeters, B.; De Roeck, G. Reference-Based Stochastic Subspace Identification for Output-Only Modal Analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Volkmar, R.; Soal, K.; Govers, Y.; Böswald, M. Experimental and operational modal analysis: Automated system identification for safety-critical applications. Mech. Syst. Signal Process. 2023, 183, 109658. [Google Scholar] [CrossRef]
- Govers, Y.; Mai, H.; Arnold, J.; Dillinger, J.K.; Pereira, A.K.; Breviglieri, C.; Takara, E.K.; Correa, M.S.; Mello, O.A.; Marques, R.F.; et al. Wind tunnel flutter testing on a highly flexible wing for aeroelastic validation in the transonic regime within the HMAE1 project. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics 2019, IFASD 2019, Savannah, GA, USA, 9–13 June 2019; pp. 1–25. [Google Scholar]
- Lind, R.; Brenner, M.; Freudinger, L.C. Wavelet Applications for flight flutter testing. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics, Williamsburg, VA, USA, 22–25 June 1999; pp. 393–402. Available online: https://ntrs.nasa.gov/api/citations/19990061885/downloads/19990061885.pdf (accessed on 8 January 2025).
- Barros-Rodriguez, J. Metodología de Ejecución y Explotación de los Ensayos en Vuelo de Flameo. Ph.D. Thesis, Universidad Politecnica de Madrid, Madrid, Spain, 2014. [Google Scholar]
- Mehra, R.K.; Mahmood, S.; Waissman, R. Identification of Aircraft and Rotorcraft Aeroelastic Modes Using State Space System Identification. In Proceedings of the International Conference on Control Applications, Albany, NJ, USA, 28–29 September 1995; pp. 432–437. [Google Scholar] [CrossRef]
- Chabalko, C.C.; Hajj, M.R.; Silva, W.A. Interrogative Testing for Nonlinear Identification of Aeroelastic Systems. AIAA J. 2008, 46, 2657–2658. [Google Scholar] [CrossRef]
- Abou-Kebeh, S.; Gil-Pita, R.; Rosa-Zurera, M. Multimodal Estimation of Sine Dwell Vibrational Responses from Aeroelastic Flutter Flight Tests. Aerospace 2021, 8, 325. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; Number 1-2; The MIT Press: Cambridge, NA, USA, 2016. [Google Scholar]
- Wang, Y.R.; Wang, Y.J. Flutter speed prediction by using deep learning. Adv. Mech. Eng. 2021, 13, 1–15. [Google Scholar] [CrossRef]
- Zheng, H.; Wu, Z.; Duan, S.; Zhou, J. Feature Extracted Method for Flutter Test Based on EMD and CNN. Int. J. Aerosp. Eng. 2021, 2021, 10. [Google Scholar] [CrossRef]
- Duan, S.; Zheng, H.; Liu, J. A Novel Classification Method for Flutter Signals Based on the CNN and STFT. Int. J. Aerosp. Eng. 2019, 2019, 9375437. [Google Scholar] [CrossRef]
- Military Specification: Airplane Strength and Rigidity. Vibration, Flutter and Divergence; Technical Report MIL-A-8870C; DoD: Arlington, VR, USA, 1993; Available online: http://everyspec.com/MIL-SPECS/MIL-SPECS-MIL-A/MIL-A-8870C_6746/ (accessed on 8 January 2025).
- Joint Service Specification Guide. Aircraft Structures; Technical Report JSSG-2006; DoD: Arlington, VR, USA, 1998; Available online: http://everyspec.com/USAF/USAF-General/JSSG-2006_10206/ (accessed on 8 January 2025).
- Li, K.; Kou, J.; Zhang, W. Deep neural network for unsteady aerodynamic and aeroelastic modeling across multiple Mach numbers. Nonlinear Dyn. 2019, 96, 2157–2177. [Google Scholar] [CrossRef]
- Chatterjee, T.; Essien, A.; Ganguli, R.; Friswell, M.I. The stochastic aeroelastic response analysis of helicopter rotors using deep and shallow machine learning. Neural Comput. Appl. 2021, 33, 16809–16828. [Google Scholar] [CrossRef]
- Goodwin, M. Matching pursuit with damped sinusoids. In Proceedings of the 1997 IEEE International Conference on Acoustics, Speech, and Signal Processing, Munich, Germany, 21–24 April 1997; Volume 3, pp. 2037–2040. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Ranges | |
|---|---|
| Frequency ranges | 4–6 Hz |
| Damping ranges | 0.01–0.2 |
| Phase ranges | 0 rad–2 rad |
| Amplitude ranges | 0–1 |
| Other Characteristics | |
| Damping values | Upscaled by a factor of 15 |
| Total | |
|---|---|
| Combined training signals | 300,000 |
| Training | 240,000 |
| Validation | 60,000 |
| Test signals (different dataset) | 120,000 |
| CNN | DNN | MLP |
|---|---|---|
| 100 × 6, 128 | 100, 100, 100 | 100 |
| 100 × 5, 128 | 100, 100 | c80 |
| 80 × 6, 128 | 80, 80, 80 | 60 |
| 80 × 5, 128 | 80, 80 | 40 |
| 60 × 6, 128 | 60, 60, 60 | 20 |
| 60 × 5, 128 | 60, 60 | |
| 40 × 6, 128 | 40, 40, 40 | |
| 40 × 5, 128 | 40, 40 | |
| 20 × 6, 128 | 20, 20, 20 | |
| 20 × 5, 128 | 20, 20 |
| Frequency | Damping | ||||||
|---|---|---|---|---|---|---|---|
| Time/Signal [ms] | Std. | Kurt. | Skew. | Std. | Kurt. | Skew. | |
| PRESTO | 60.1 | 1.127 | 7.002 | −0.476 | 2.444 | 43.45 | −5.508 |
| Laplace | 62.3 | 0.906 | 4.806 | 0.054 | 0.672 | 11.95 | −2.228 |
| MLP 20 | 0.01 | 0.734 | 2.593 | 0.390 | 0.649 | 4.651 | −1.435 |
| DNN 20 × 20 | 0.01 | 0.725 | 3.322 | 0.677 | 0.631 | 6.052 | −1.633 |
| DNN 20 × 20 × 20 | 0.01 | 0.783 | 3.526 | 0.694 | 0.581 | 7.153 | −1.560 |
| MLP 40 | 0.01 | 0.724 | 2.975 | 0.552 | 0.699 | 4.907 | −1.448 |
| DNN 40 × 40 | 0.01 | 0.796 | 3.790 | 0.857 | 0.772 | 7.055 | −1.654 |
| DNN 40 × 40 × 40 | 0.02 | 0.737 | 2.923 | 0.342 | 1.476 | 13.65 | −2.603 |
| MLP 60 | 0.02 | 0.724 | 3.223 | 0.631 | 0.677 | 4.980 | −1.454 |
| DNN 60 × 60 | 0.02 | 0.744 | 3.187 | 0.734 | 0.899 | 9.617 | −2.029 |
| DNN 60 × 60 × 60 | 0.02 | 0.718 | 3.145 | 0.757 | 0.948 | 17.81 | −2.722 |
| MLP 80 | 0.02 | 0.721 | 3.322 | 0.679 | 0.657 | 5.176 | −1.470 |
| DNN 80 × 80 | 0.02 | 0.774 | 2.837 | 0.512 | 1.885 | 9.221 | −2.018 |
| DNN 80 × 80 × 80 | 0.02 | 0.844 | 2.878 | 0.520 | 1.554 | 11.33 | −1.969 |
| MLP 100 | 0.02 | 0.720 | 3.314 | 0.676 | 0.638 | 5.227 | −1.476 |
| DNN 100 × 100 | 0.02 | 0.812 | 3.421 | 0.702 | 1.071 | 6.088 | −0.080 |
| DNN 100 × 100 × 100 | 0.03 | 0.714 | 3.379 | 0.828 | 0.724 | 9.376 | −2.049 |
| CNN 20 × 5, 128 | 0.82 | 0.716 | 3.599 | 1.171 | 0.672 | 11.55 | −2.461 |
| CNN 20 × 6, 128 | 0.83 | 0.716 | 3.610 | 1.180 | 0.672 | 11.70 | −2.493 |
| CNN 40 × 5, 128 | 1.02 | 0.716 | 3.595 | 1.190 | 0.685 | 12.72 | −2.610 |
| CNN 40 × 6, 128 | 1.04 | 0.716 | 3.598 | 1.197 | 0.703 | 12.50 | −2.623 |
| CNN 60 × 5, 128 | 1.09 | 0.718 | 3.605 | 1.195 | 0.694 | 12.93 | −2.632 |
| CNN 60 × 6, 128 | 1.10 | 0.719 | 3.586 | 1.194 | 0.695 | 12.90 | −2.666 |
| CNN 80 × 5, 128 | 1.13 | 0.719 | 3.585 | 1.184 | 0.690 | 12.53 | −2.565 |
| CNN 80 × 6, 128 | 1.28 | 0.718 | 3.580 | 1.186 | 0.689 | 12.46 | −2.587 |
| CNN 100 × 5, 128 | 1.24 | 0.720 | 3.589 | 1.187 | 0.692 | 13.47 | −2.673 |
| CNN 100 × 6, 128 | 1.48 | 0.719 | 3.594 | 1.189 | 0.695 | 12.38 | −2.596 |
| m | n | MSE | MAE | MaxAE | ||
|---|---|---|---|---|---|---|
| PRESTO | 0.922 | −0.003 | 0.770 | 0.054 | 0.131 | 0.843 |
| Laplace | 0.783 | −0.003 | 0.692 | 0.059 | 0.139 | 0.948 |
| MLP 20 | 0.637 | −0.003 | 0.551 | 0.058 | 0.140 | 0.931 |
| DNN 20 × 20 | 0.759 | −0.002 | 0.657 | 0.056 | 0.137 | 0.924 |
| DNN 20 × 20 × 20 | 0.798 | −0.004 | 0.690 | 0.057 | 0.137 | 0.924 |
| MLP 40 | 0.681 | −0.004 | 0.597 | 0.057 | 0.138 | 0.920 |
| DNN 40 × 40 | 0.794 | −0.002 | 0.681 | 0.056 | 0.136 | 0.921 |
| DNN 40 × 40 × 40 | 0.787 | −0.003 | 0.677 | 0.057 | 0.138 | 0.916 |
| MLP 60 | 0.734 | −0.003 | 0.639 | 0.057 | 0.138 | 0.930 |
| DNN 60 × 60 | 0.808 | −0.003 | 0.684 | 0.057 | 0.137 | 0.924 |
| DNN 60 × 60 × 60 | 0.768 | −0.003 | 0.656 | 0.057 | 0.138 | 0.919 |
| MLP 80 | 0.719 | −0.004 | 0.631 | 0.057 | 0.138 | 0.929 |
| DNN 80 × 80 | 0.754 | −0.003 | 0.644 | 0.056 | 0.137 | 0.921 |
| DNN 80 × 80 × 80 | 0.763 | −0.003 | 0.661 | 0.057 | 0.137 | 0.922 |
| MLP 100 | 0.756 | −0.004 | 0.638 | 0.057 | 0.138 | 0.930 |
| DNN 100 × 100 | 0.746 | −0.003 | 0.648 | 0.057 | 0.138 | 0.919 |
| DNN 100 × 100 × 100 | 0.766 | −0.003 | 0.651 | 0.057 | 0.138 | 0.917 |
| CNN 20 × 5, 128 | 0.764 | −0.003 | 0.660 | 0.062 | 0.142 | 0.980 |
| CNN 20 × 6, 128 | 0.810 | −0.003 | 0.700 | 0.060 | 0.140 | 0.952 |
| CNN 40 × 5, 128 | 0.800 | −0.004 | 0.697 | 0.058 | 0.138 | 0.944 |
| CNN 40 × 6, 128 | 0.817 | −0.003 | 0.700 | 0.059 | 0.139 | 0.953 |
| CNN 60 × 5, 128 | 0.784 | −0.003 | 0.679 | 0.060 | 0.141 | 0.963 |
| CNN 60 × 6, 128 | 0.811 | −0.003 | 0.699 | 0.061 | 0.141 | 0.955 |
| CNN 80 × 5, 128 | 0.812 | −0.003 | 0.691 | 0.060 | 0.140 | 0.955 |
| CNN 80 × 6, 128 | 0.807 | −0.004 | 0.701 | 0.060 | 0.140 | 0.953 |
| CNN 100 × 5, 128 | 0.820 | −0.004 | 0.699 | 0.060 | 0.140 | 0.960 |
| CNN 100 × 6, 128 | 0.836 | −0.003 | 0.720 | 0.060 | 0.140 | 0.965 |
| DL avg. | 0.773 | −0.003 | 0.666 | 0.058 | 0.139 | 0.937 |
| DL Std. | 0.0451 | 0.0004 | 0.0374 | 0.0016 | 0.0015 | 0.0187 |
| PRESTO norm. by DL avg. | 1.192 | 0.840 | 1.165 | 0.934 | 0.946 | 0.899 |
| Laplace norm. by DL avg. | 1.012 | 0.862 | 1.038 | 1.016 | 1.003 | 1.012 |
| CNNs avg. | 0.806 | −0.003 | 0.695 | 0.060 | 0.140 | 0.958 |
| CNNs Std. | 0.0198 | 0.0005 | 0.0158 | 0.0008 | 0.0010 | 0.0098 |
| PRESTO norm. by CNNs avg. | 1.144 | 0.822 | 1.117 | 0.905 | 0.936 | 0.879 |
| Laplace norm. by CNNs avg. | 0.970 | 0.843 | 0.995 | 0.984 | 0.992 | 0.990 |
| DNNs avg. | 0.774 | −0.003 | 0.665 | 0.057 | 0.137 | 0.921 |
| DNNs Std. | 0.0210 | 0.0004 | 0.0166 | 0.0003 | 0.0004 | 0.0029 |
| PRESTO norm. by DNNs avg. | 1.190 | 0.892 | 1.167 | 0.957 | 0.955 | 0.915 |
| Laplace norm. by DNNs avg. | 1.010 | 0.915 | 1.040 | 1.041 | 1.013 | 1.030 |
| MLPs avg. | 0.705 | −0.003 | 0.611 | 0.057 | 0.138 | 0.928 |
| MLPs Std. | 0.0469 | 0.0002 | 0.0376 | 0.0005 | 0.0008 | 0.0044 |
| PRESTO norm. by MLPs avg. | 1.307 | 0.784 | 1.270 | 0.949 | 0.948 | 0.908 |
| Laplace norm. by MLPs avg. | 1.109 | 0.805 | 1.131 | 1.032 | 1.005 | 1.022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abou-Kebeh, S.; Gil-Pita, R.; Rosa-Zurera, M. Application of Deep Learning to Identify Flutter Flight Testing Signals Parameters and Analysis of Real F-18 Flutter Flight Test Data. Aerospace 2025, 12, 34. https://doi.org/10.3390/aerospace12010034
Abou-Kebeh S, Gil-Pita R, Rosa-Zurera M. Application of Deep Learning to Identify Flutter Flight Testing Signals Parameters and Analysis of Real F-18 Flutter Flight Test Data. Aerospace. 2025; 12(1):34. https://doi.org/10.3390/aerospace12010034
Chicago/Turabian StyleAbou-Kebeh, Sami, Roberto Gil-Pita, and Manuel Rosa-Zurera. 2025. "Application of Deep Learning to Identify Flutter Flight Testing Signals Parameters and Analysis of Real F-18 Flutter Flight Test Data" Aerospace 12, no. 1: 34. https://doi.org/10.3390/aerospace12010034
APA StyleAbou-Kebeh, S., Gil-Pita, R., & Rosa-Zurera, M. (2025). Application of Deep Learning to Identify Flutter Flight Testing Signals Parameters and Analysis of Real F-18 Flutter Flight Test Data. Aerospace, 12(1), 34. https://doi.org/10.3390/aerospace12010034