
Data Downloaded via Parachute from a NASA Super-Pressure Balloon

 , , , , , , , , , , , , , , , , , , , , , , , , , and add
Show full author list
, , , , , , , , , , , , , , , , , , , , , , , , , and add
Show full author list
Abstract
:1. Introduction
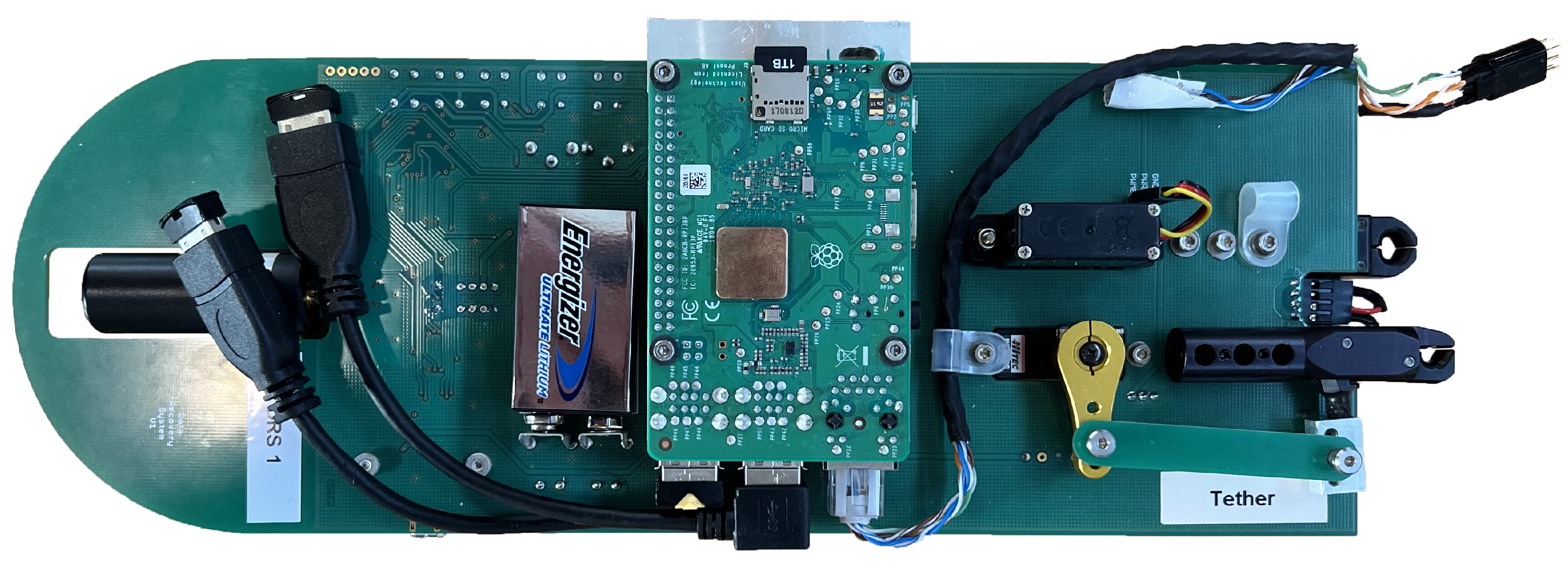
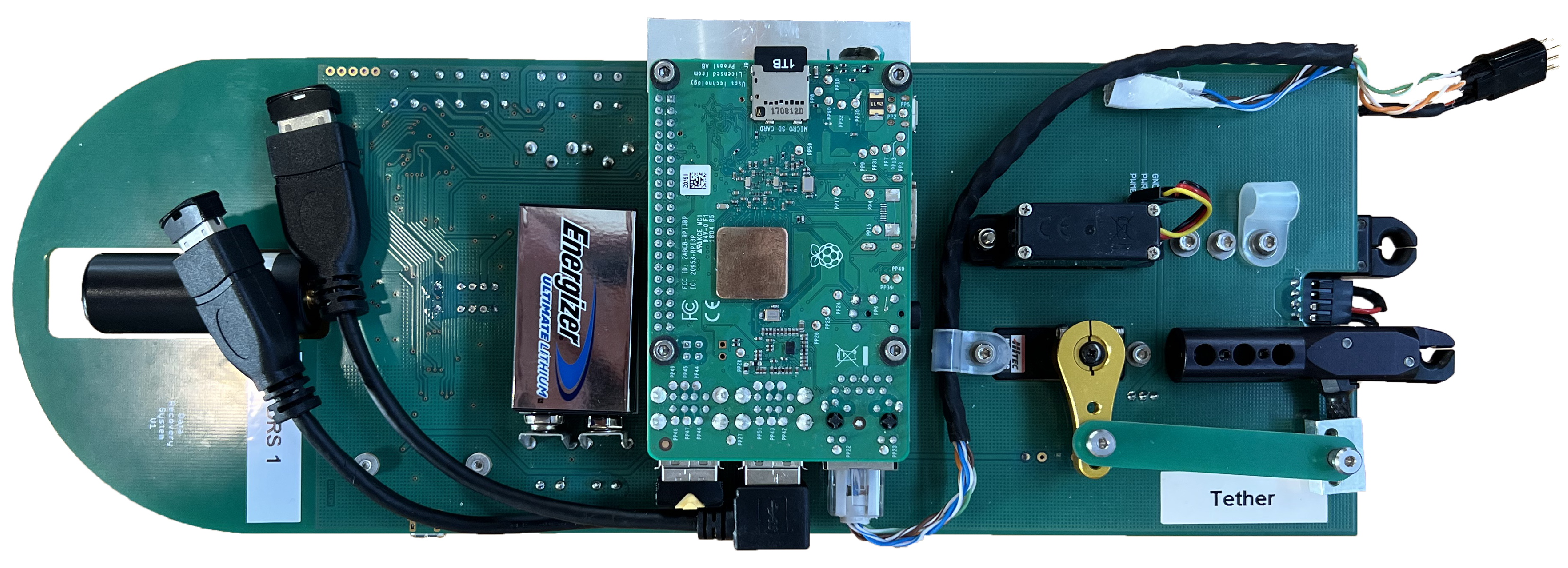
2. Upgraded Hardware Design
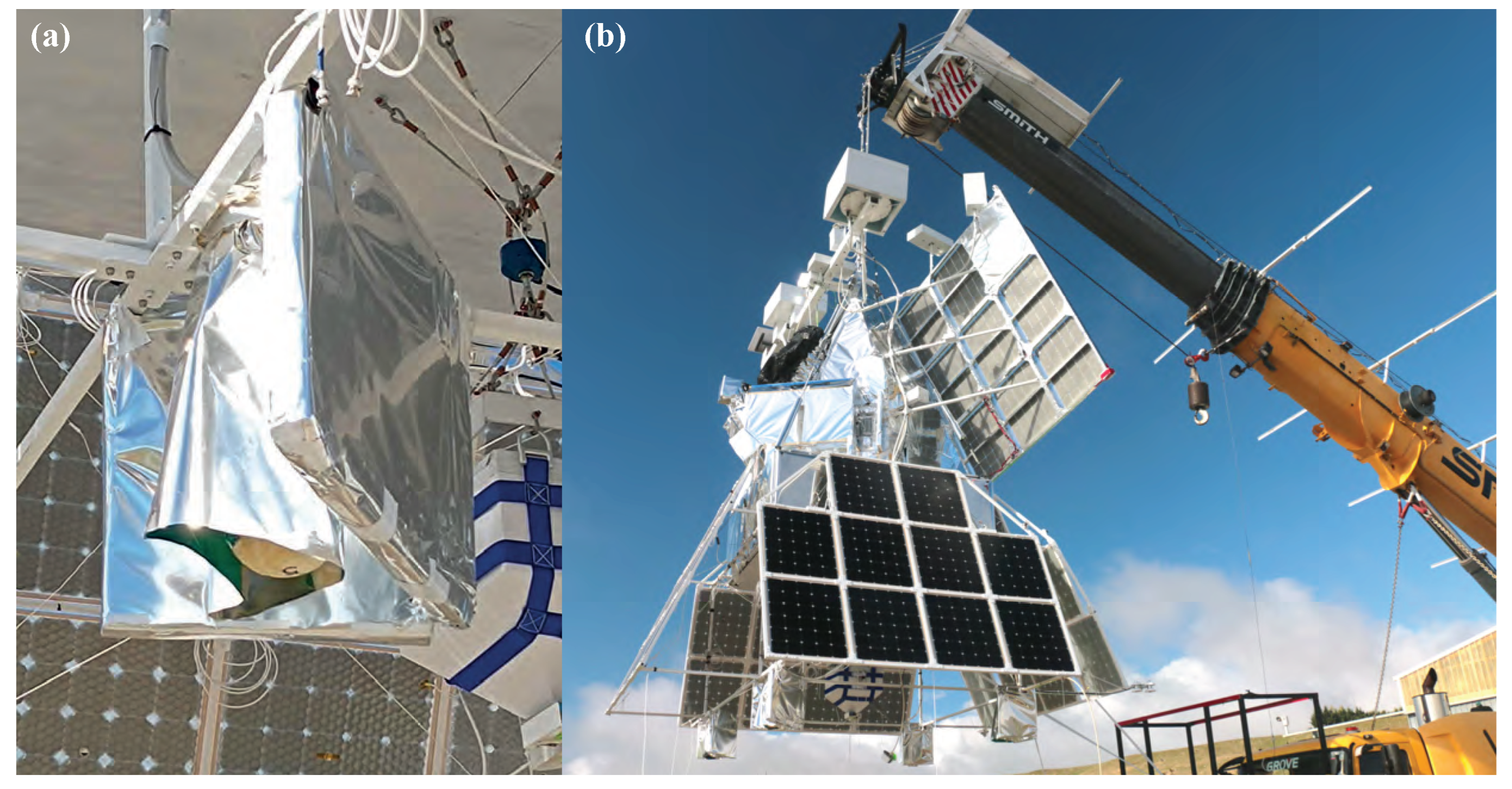
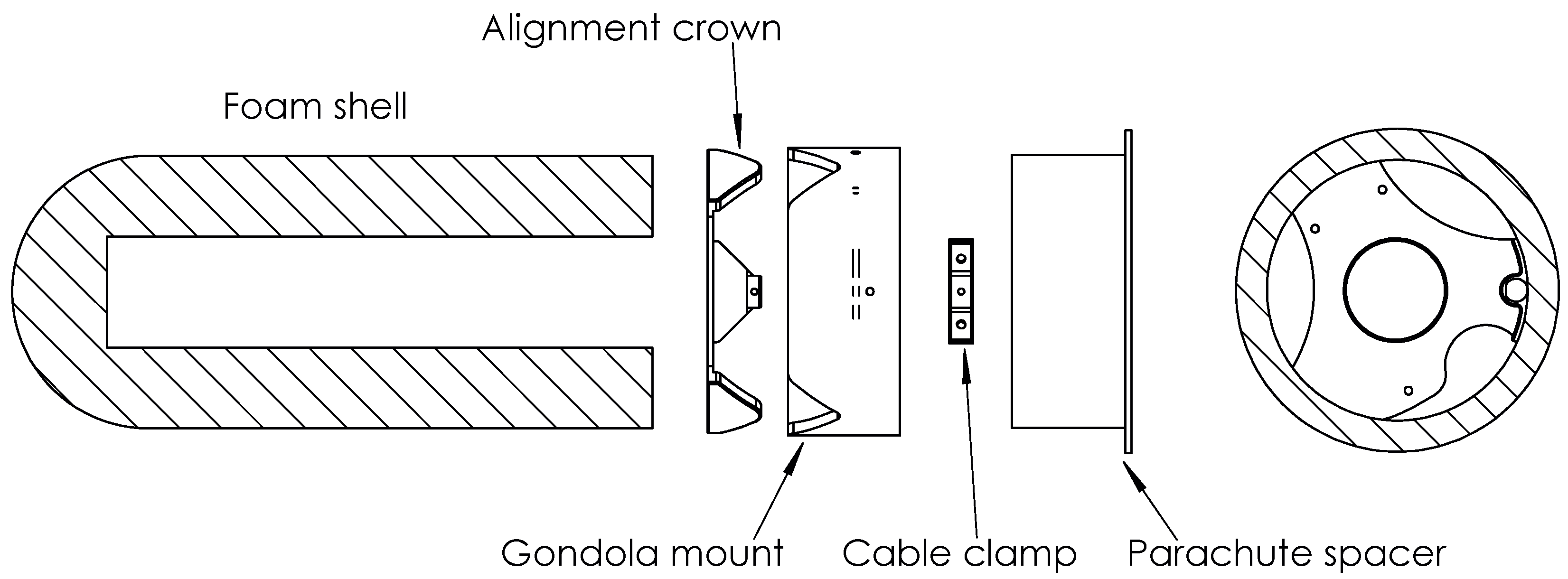
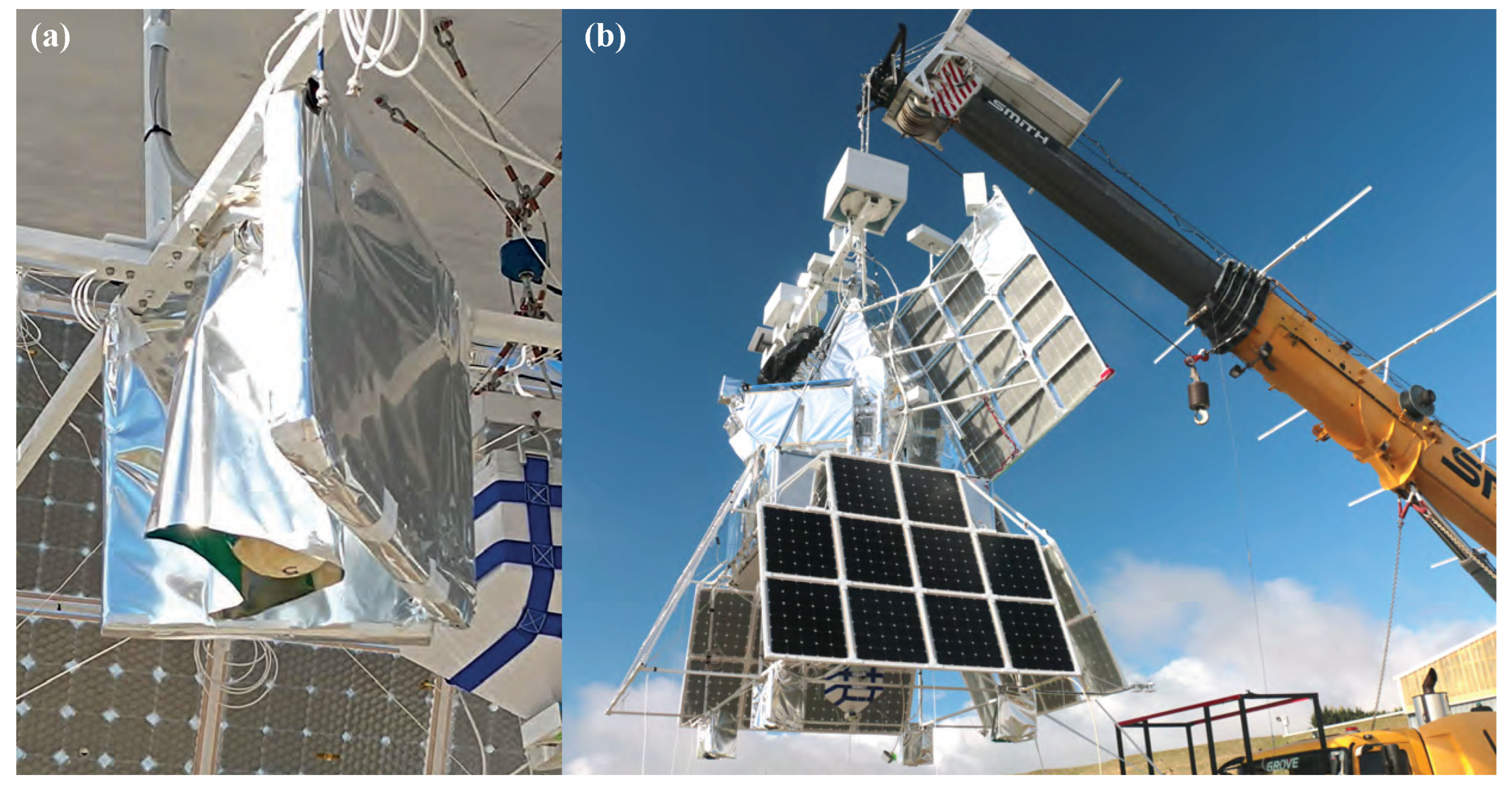
2.1. Alignment and Attachment to the Main Payload
2.2. Hardwired Ethernet to the Main Payload
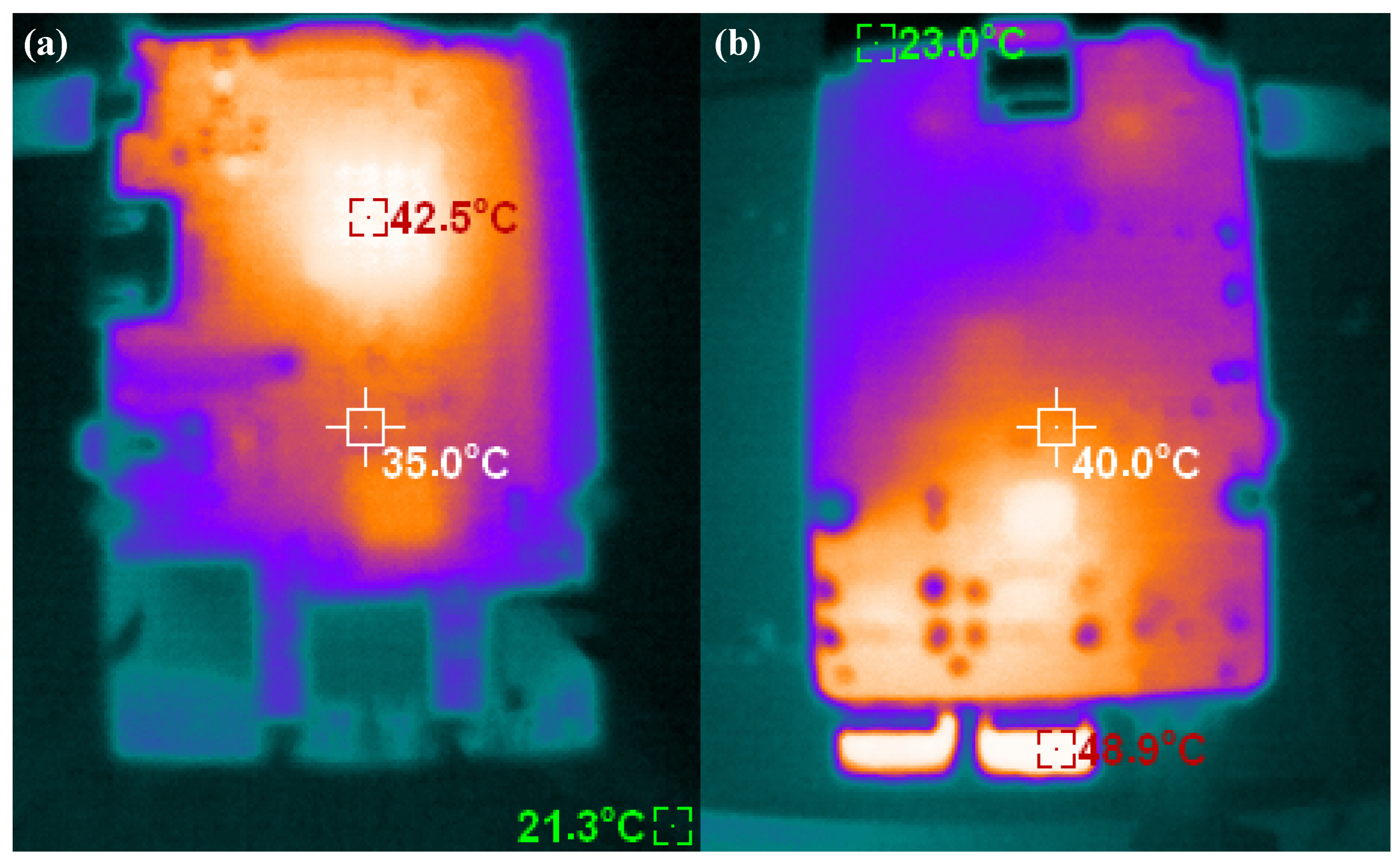
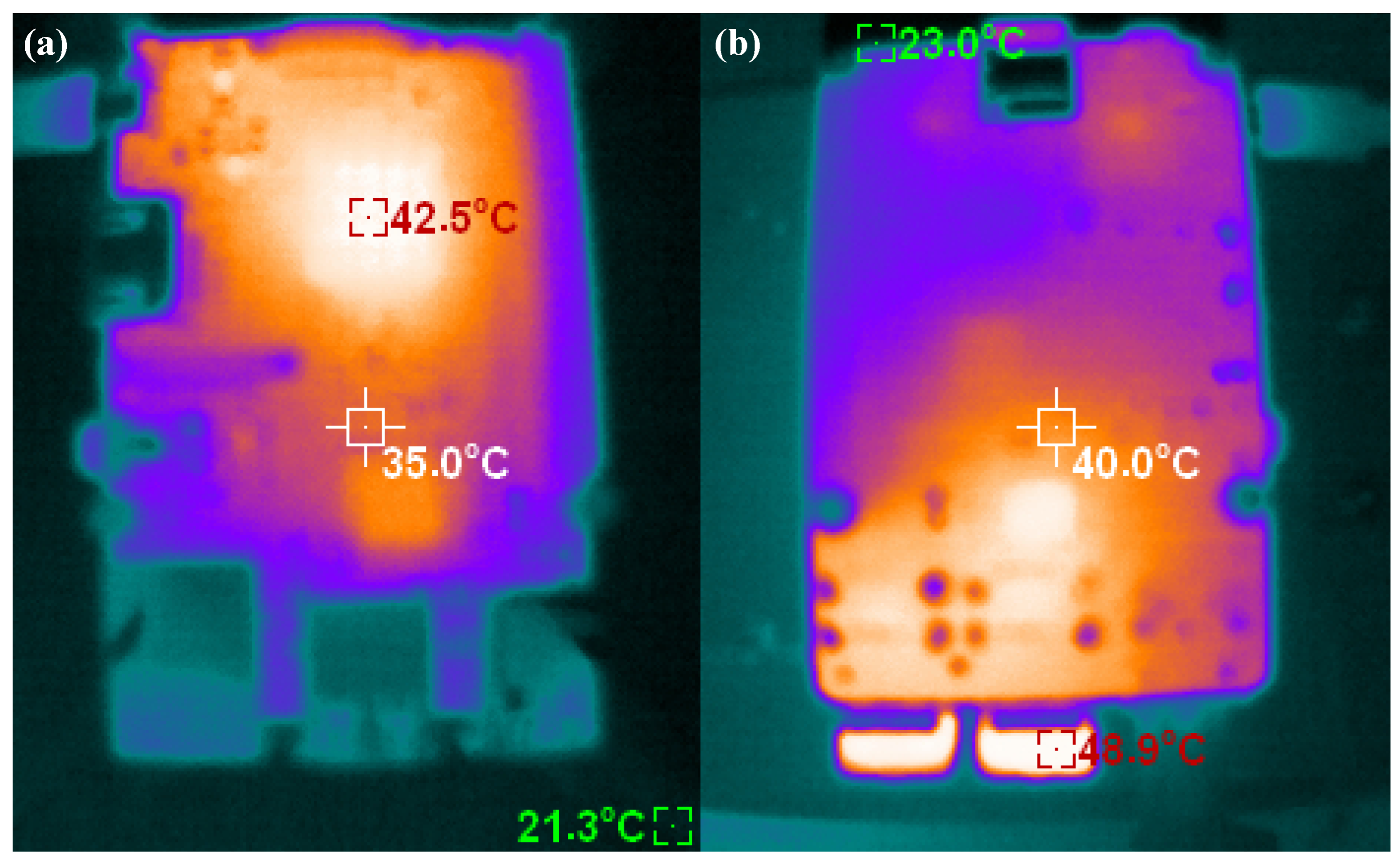
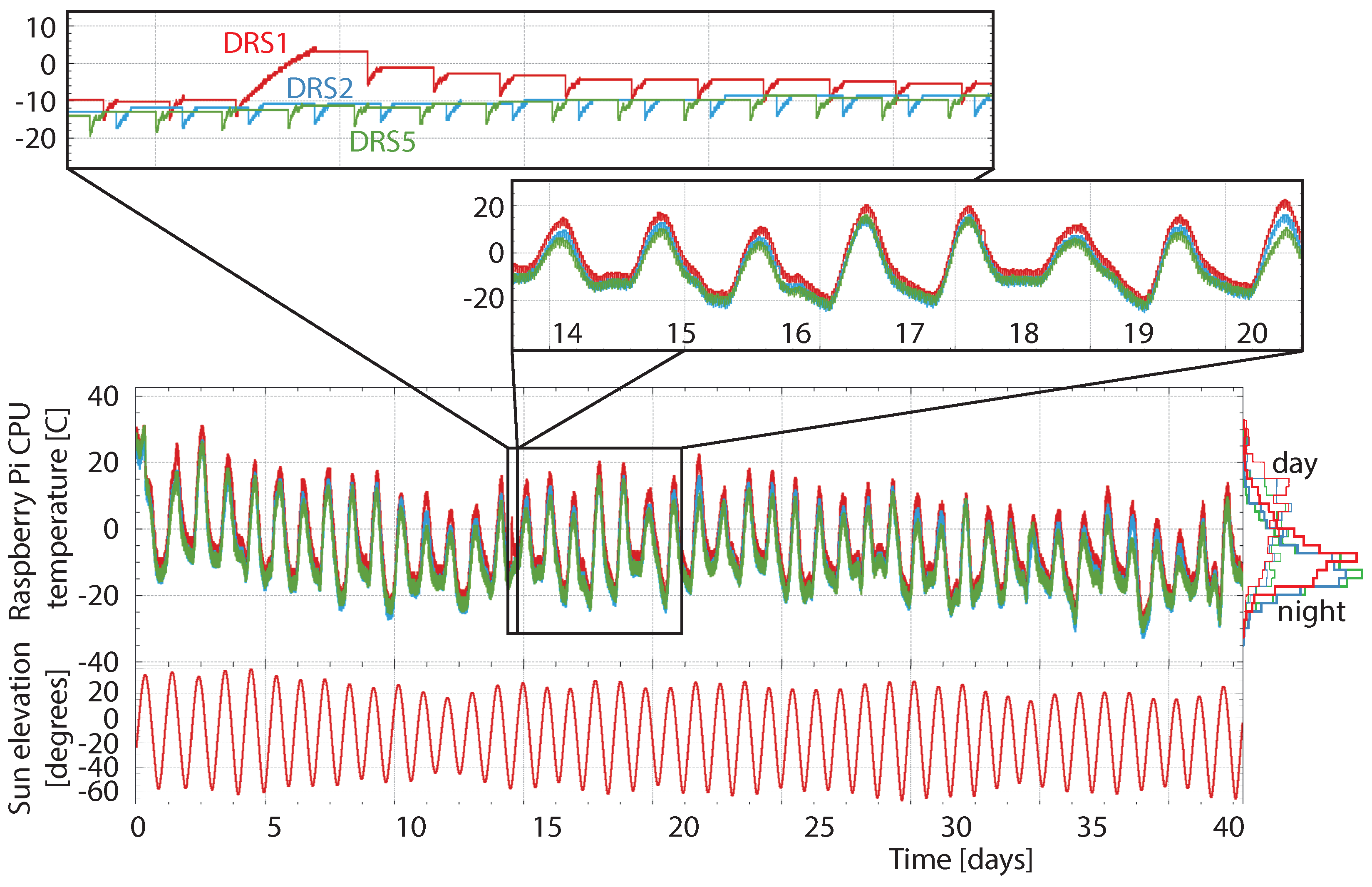
2.3. Thermal Management
2.4. Data Storage
2.5. One Failure on Launch
3. Descent and Recovery
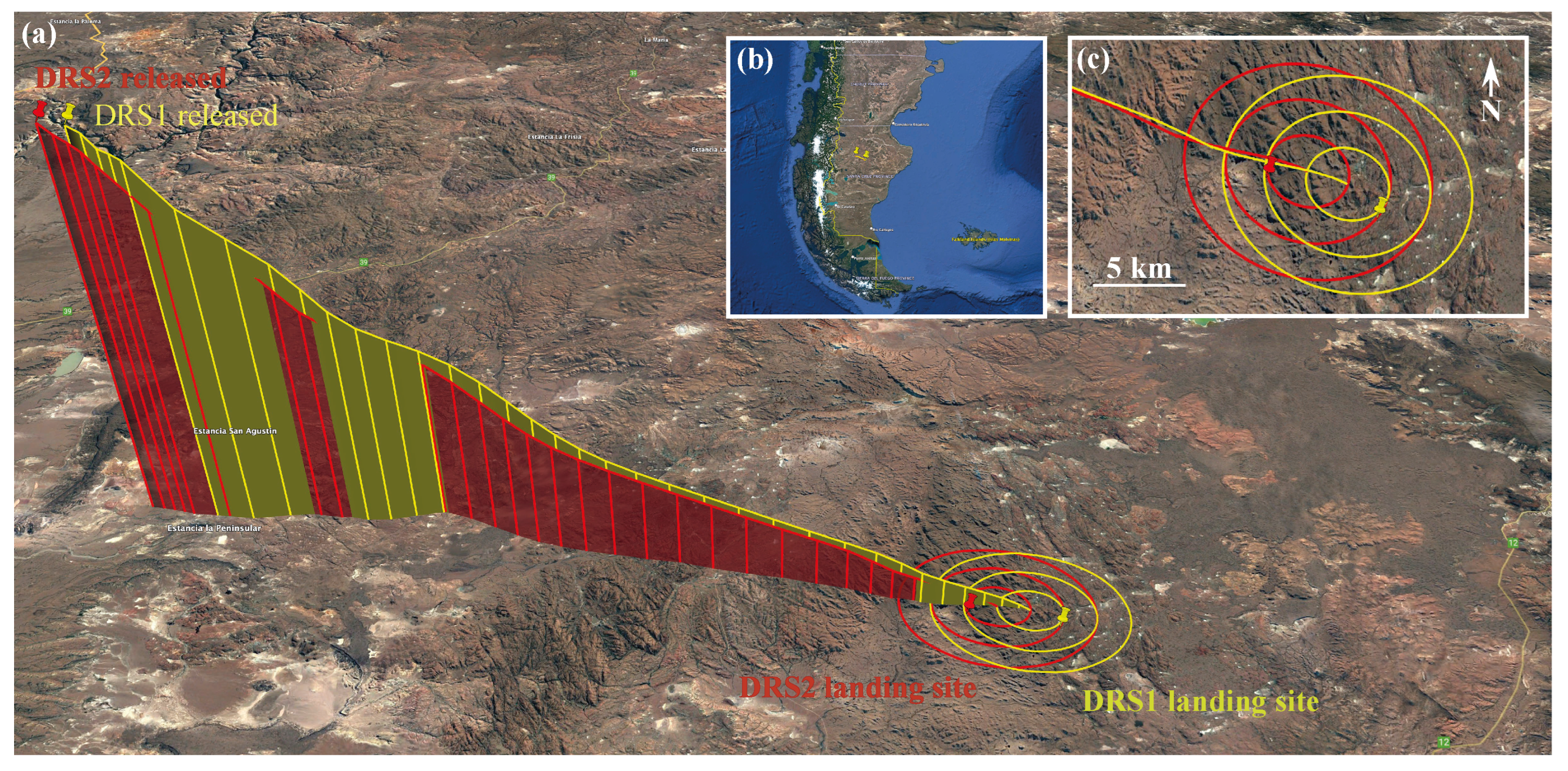
3.1. Release Time and Location
3.2. Predicted Descent Trajectories
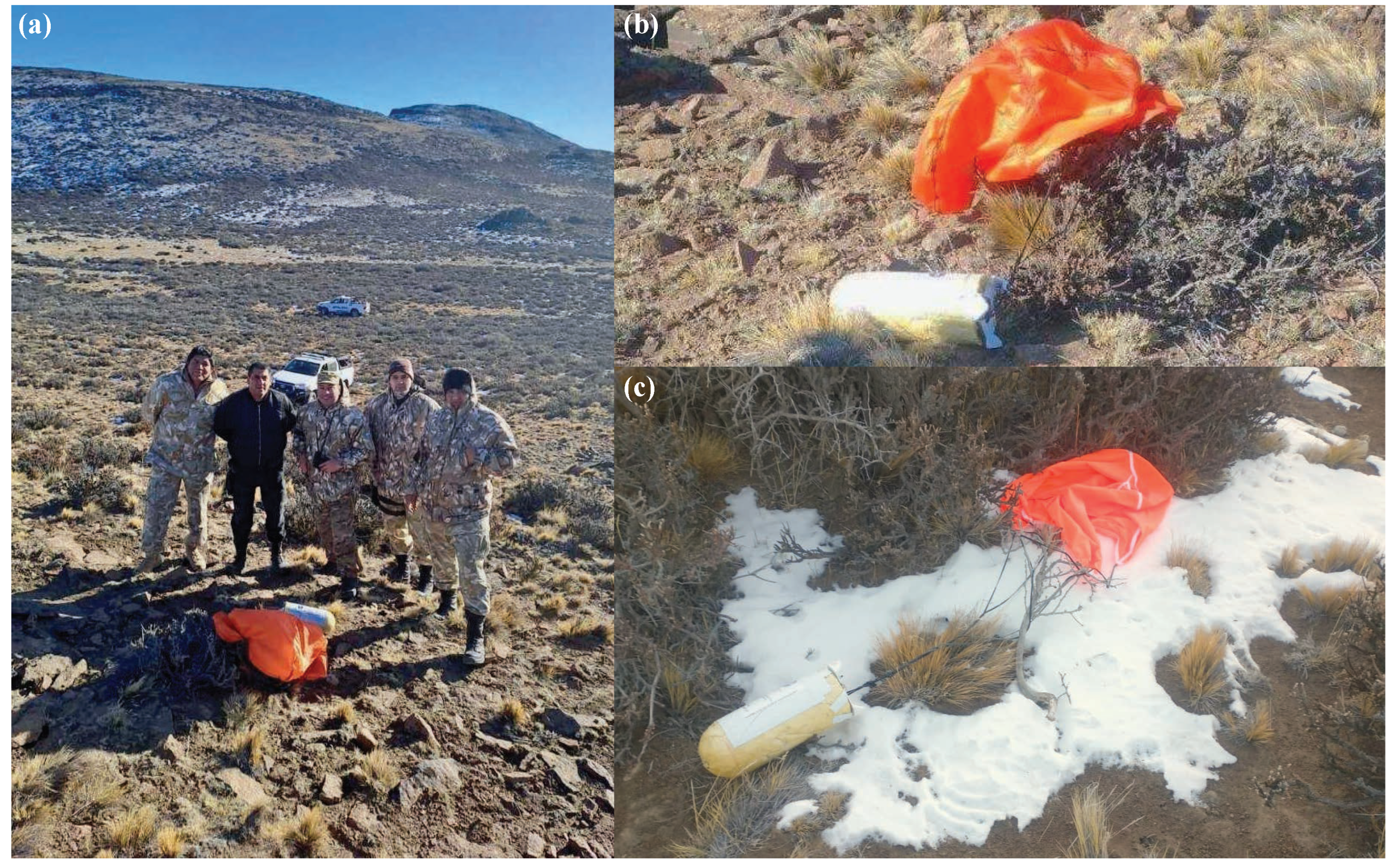
3.3. Reported Landing Sites
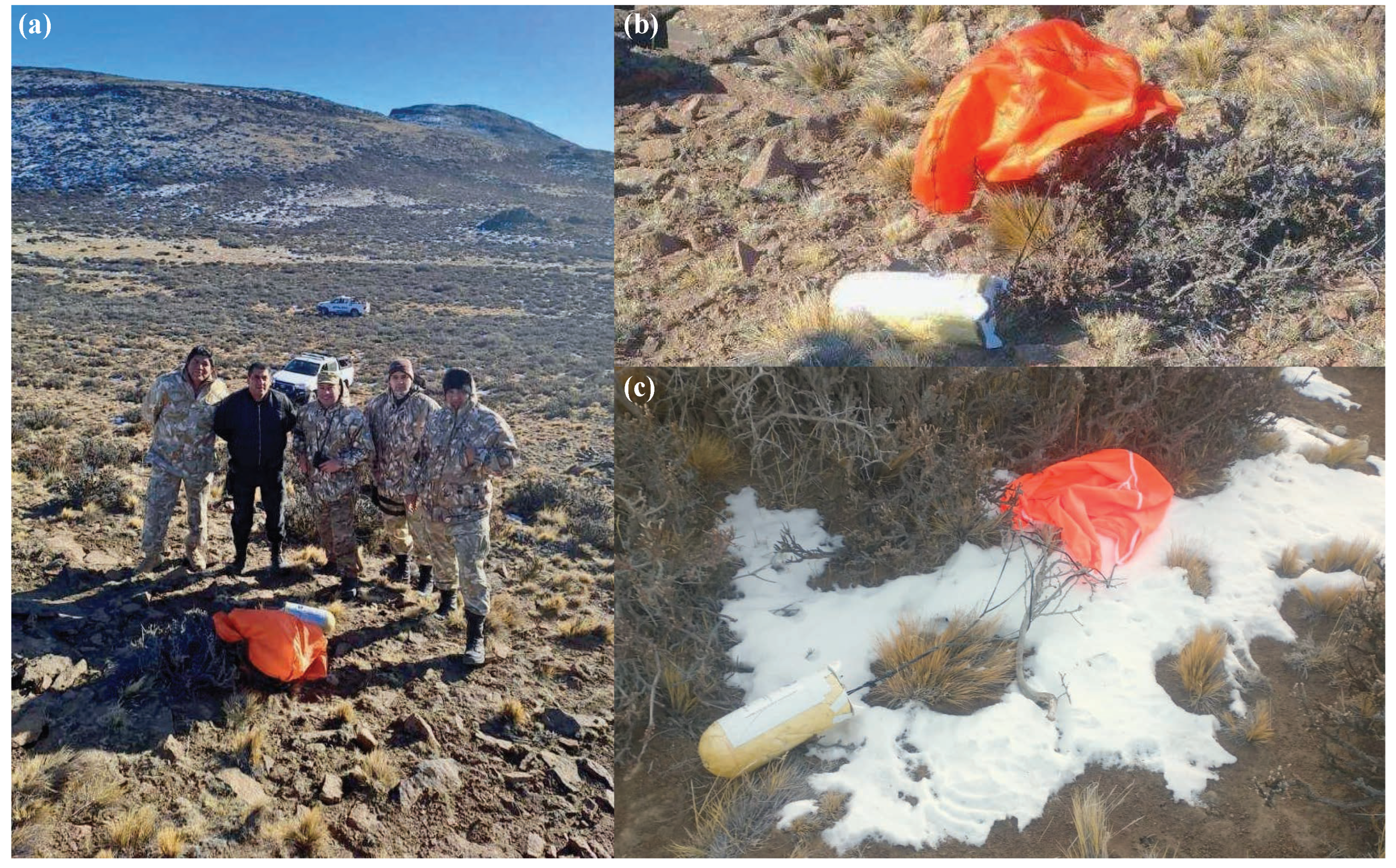
3.4. Successful Recovery
4. Results
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| cpe | Co-polyester, a branched version of petg |
| drs | Data Recovery System |
| gfs | Global Forecast System (weather model) |
| gnss | Global Navigation Satellite System, of which gps is a subset |
| gps | Global positioning system |
| pcb | Printed circuit board |
| petg | Glycol-modified polyethylene terephthalate hard plastic |
| pla | Polylactic acid hard plastic |
| sbd | Short Burst Data (Iridium satellite message) |
| spb | Super-pressure (closed, helium-filled) balloon |
| superBIT | Super-pressure Balloon-borne Imaging Telescope |
| tdrss | Tracking and Data Relay Satellite System |
References
- Romualdez, L.J.; Benton, S.J.; Clark, P.; Damaren, C.J.; Eifler, T.; Fraisse, A.A.; Galloway, M.N.; Hartley, J.W.; Jones, W.C.; Li, L.; et al. The design and development of a high-resolution visible-to-near-UV telescope for balloon-borne astronomy: SuperBIT. arXiv 2016, arXiv:1608.02502. [Google Scholar]
- Karoly, D. (Ed.) Meteorology of the Southern Hemisphere; American Meteorological Society: Boston, MA, USA, 2015. [Google Scholar]
- Shaaban, M.M.; Gill, A.S.; McCleary, J.; Massey, R.J.; Benton, S.J.; Brown, A.M.; Damaren, C.J.; Eifler, T.; Fraisse, A.A.; Everett, S.; et al. Weak Lensing in the Blue: A Counter-intuitive Strategy for Stratospheric Observations. AJ 2022, 164, 245. [Google Scholar] [CrossRef]
- Clark, P.; Funk, M.; Funk, B.; Funk, T.; Meadows, R.; Brown, A.; Li, L.; Massey, R.; Netterfield, C. An open source toolkit for the tracking, termination and recovery of high altitude balloon flights and payloads. J. Instrum. 2019, 14, P04003. [Google Scholar] [CrossRef]
- UN. Committee of Experts on the Transport of Dangerous Goods. Recommendations on the Transport of Dangerous Goods. Manual of Tests and Criteria. Technical Report, United Nations, Geneva. 2019. Available online: https://digitallibrary.un.org/record/3846833 (accessed on 29 October 2023).
- Sirks, E.L.; Clark, P.; Massey, R.J.; Benton, S.J.; Brown, A.M.; Damaren, C.J.; Eifler, T.; Fraisse, A.A.; Frenk, C.; Funk, M.; et al. Download by parachute: Retrieval of assets from high altitude balloons. J. Instrum. 2020, 15, P05014. [Google Scholar] [CrossRef]
- Gualtieri, R.; Filippini, J.P.; Ade, P.A.R.; Amiri, M.; Benton, S.J.; Bergman, A.S.; Bihary, R.; Bock, J.J.; Bond, J.R.; Bryan, S.A.; et al. SPIDER: CMB Polarimetry from the Edge of Space. J. Low Temp. Phys. 2018, 193, 1112–1121. [Google Scholar] [CrossRef]
- Oliver, J.E. Standard atmosphere. In Climatology; Springer US: Boston, MA, USA, 1987; pp. 801–803. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event | Time (UT) | Latitude [deg] | Longitude [deg] | Altitude [m] |
|---|---|---|---|---|
| spb log #1 | 12:29:33 | 32,585 | ||
| spb log #2 | 12:30:37 | 32,488 | ||
| Release of drs2 | 12:31:28 | 32,439 | ||
| spb log #3 | 12:31:40 | 32,428 | ||
| Release of drs1 | 12:31:55 | 32,323 | ||
| spb log #4 | 12:32:44 | 31,981 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sirks, E.L.; Massey, R.; Gill, A.S.; Anderson, J.; Benton, S.J.; Brown, A.M.; Clark, P.; English, J.; Everett, S.W.; Fraisse, A.A.; et al. Data Downloaded via Parachute from a NASA Super-Pressure Balloon. Aerospace 2023, 10, 960. https://doi.org/10.3390/aerospace10110960
Sirks EL, Massey R, Gill AS, Anderson J, Benton SJ, Brown AM, Clark P, English J, Everett SW, Fraisse AA, et al. Data Downloaded via Parachute from a NASA Super-Pressure Balloon. Aerospace. 2023; 10(11):960. https://doi.org/10.3390/aerospace10110960
Chicago/Turabian StyleSirks, Ellen L., Richard Massey, Ajay S. Gill, Jason Anderson, Steven J. Benton, Anthony M. Brown, Paul Clark, Joshua English, Spencer W. Everett, Aurelien A. Fraisse, and et al. 2023. "Data Downloaded via Parachute from a NASA Super-Pressure Balloon" Aerospace 10, no. 11: 960. https://doi.org/10.3390/aerospace10110960
APA StyleSirks, E. L., Massey, R., Gill, A. S., Anderson, J., Benton, S. J., Brown, A. M., Clark, P., English, J., Everett, S. W., Fraisse, A. A., Franco, H., Hartley, J. W., Harvey, D., Holder, B., Hunter, A., Huff, E. M., Hynous, A., Jauzac, M., Jones, W. C., ... Vassilakis, G. N. (2023). Data Downloaded via Parachute from a NASA Super-Pressure Balloon. Aerospace, 10(11), 960. https://doi.org/10.3390/aerospace10110960