Improvement of Ultrasound-Based Localization System Using Sine Wave Detector and CAN Network


Abstract
1. Introduction
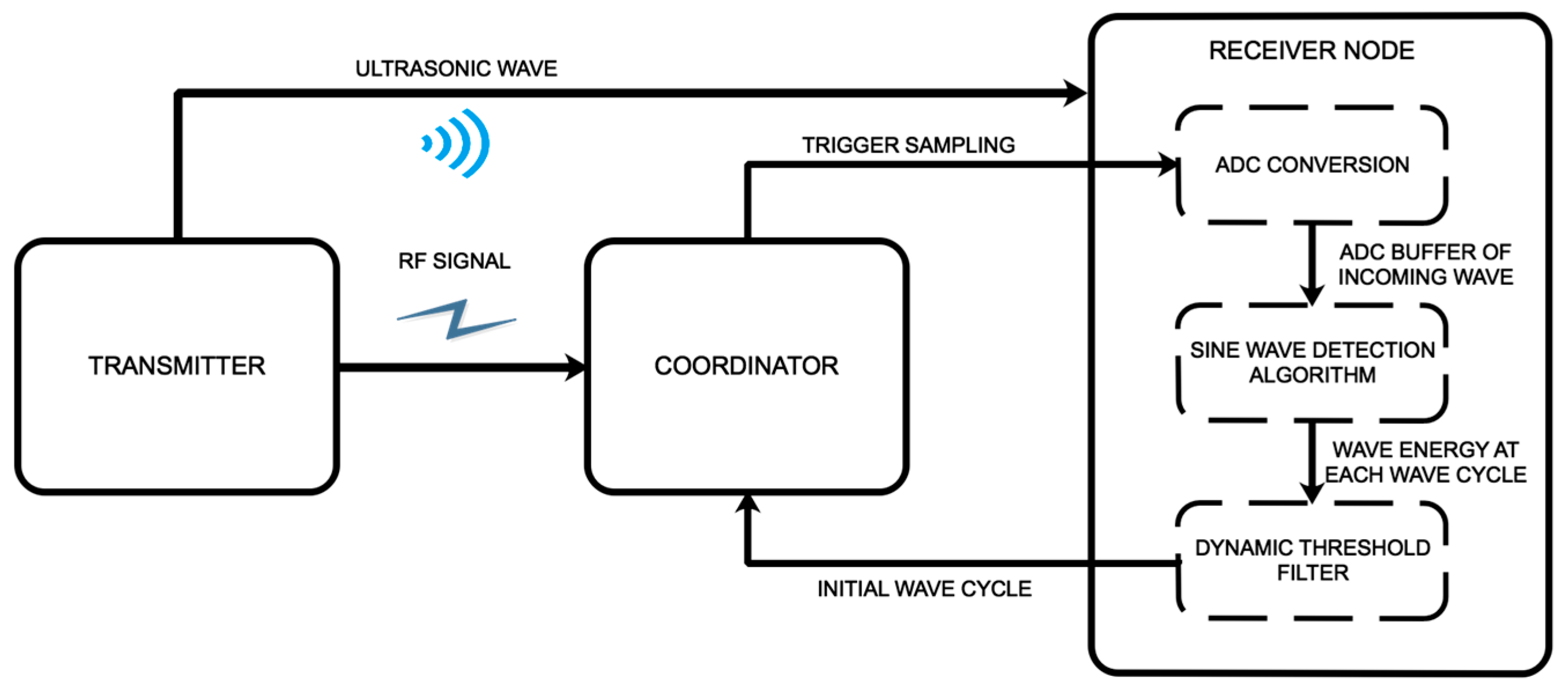
2. System Description
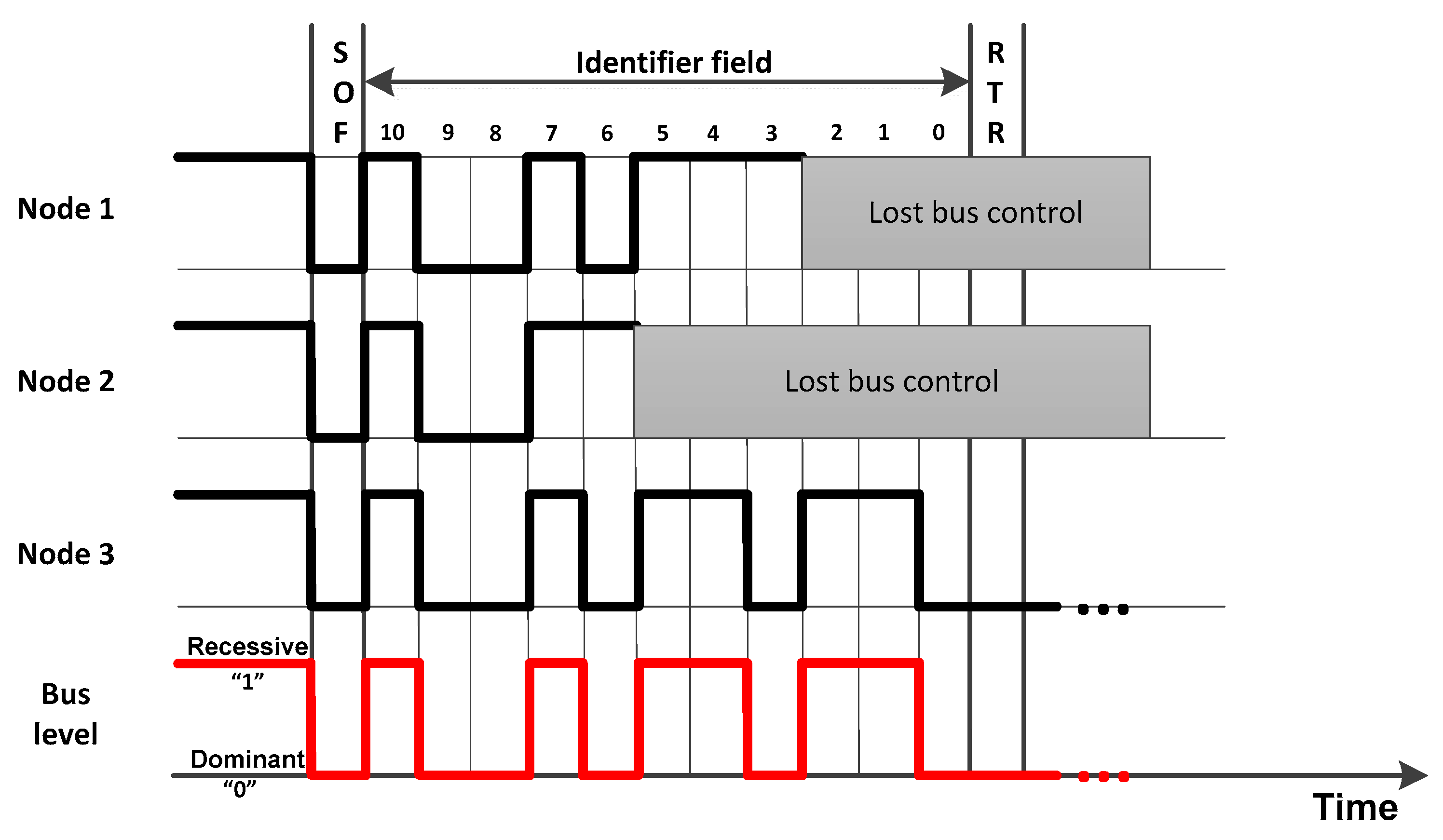
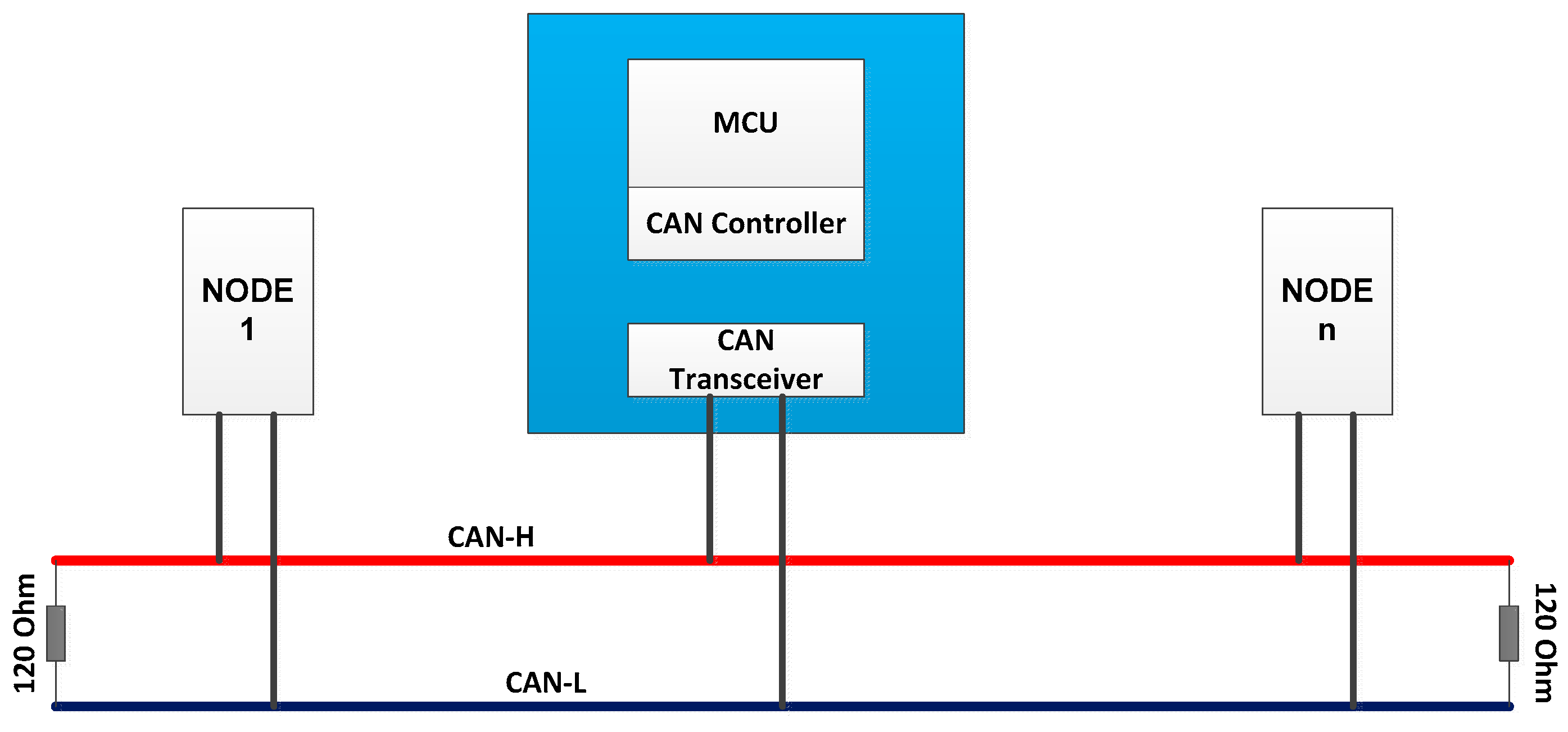
2.1. Controller Area Network (CAN) and Its Advantages
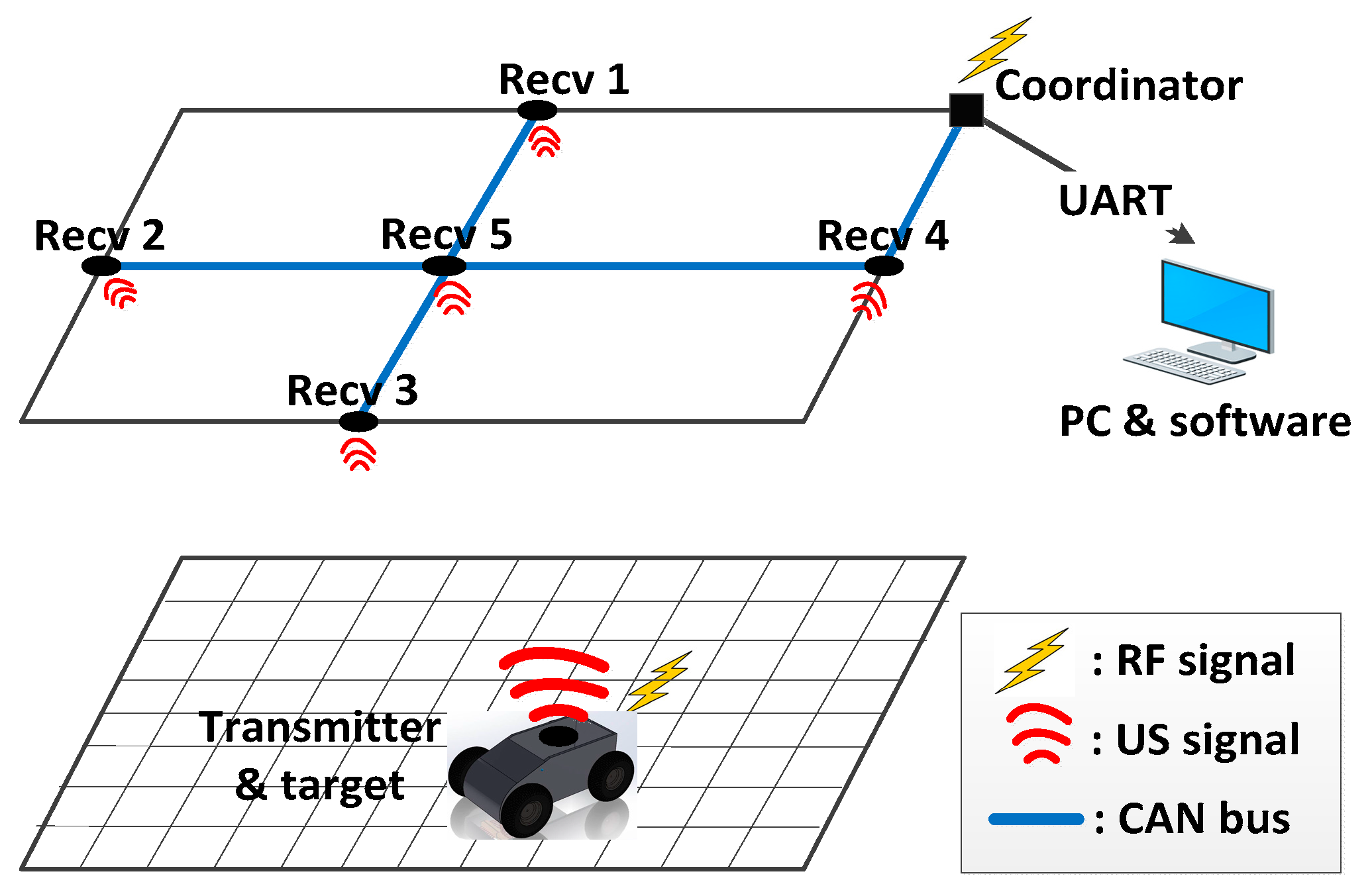
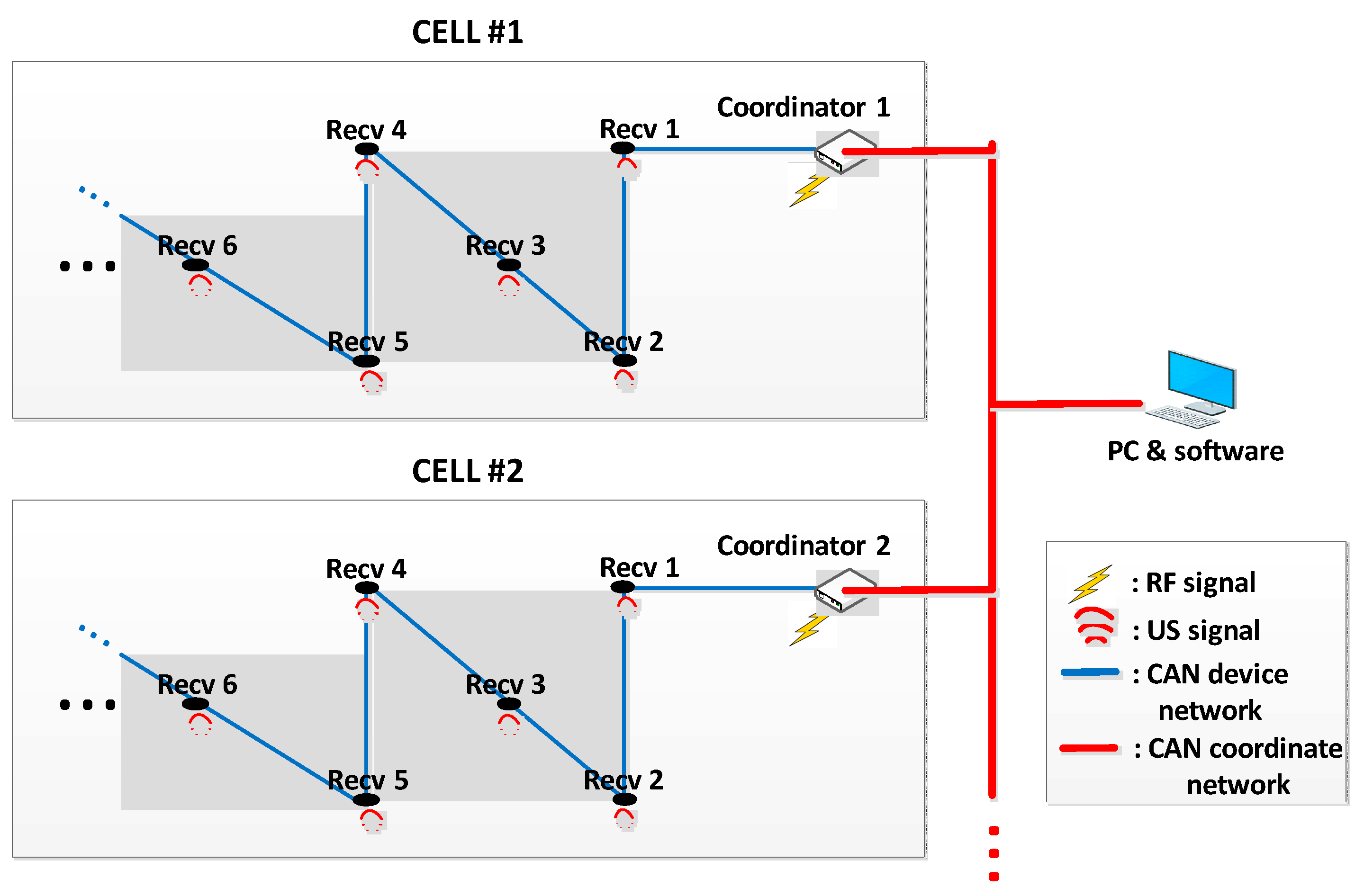
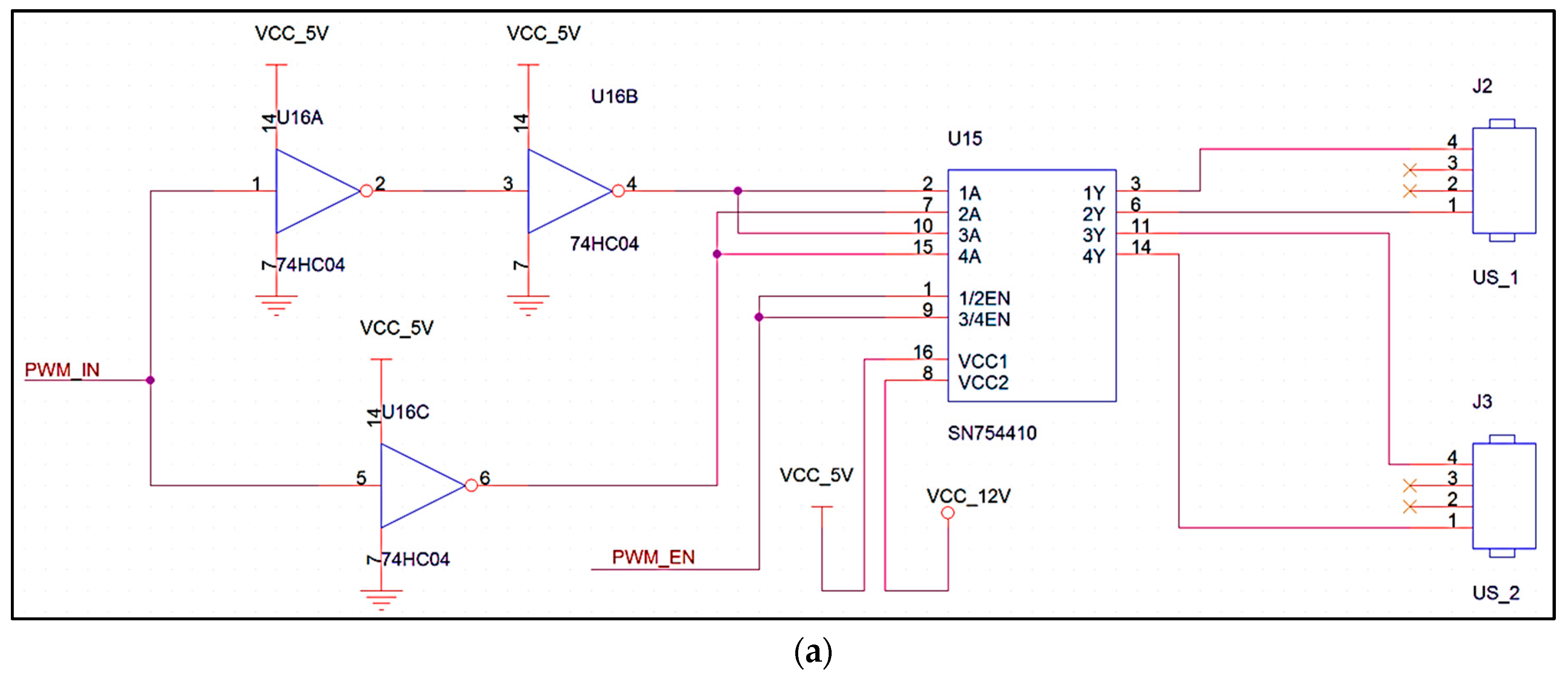
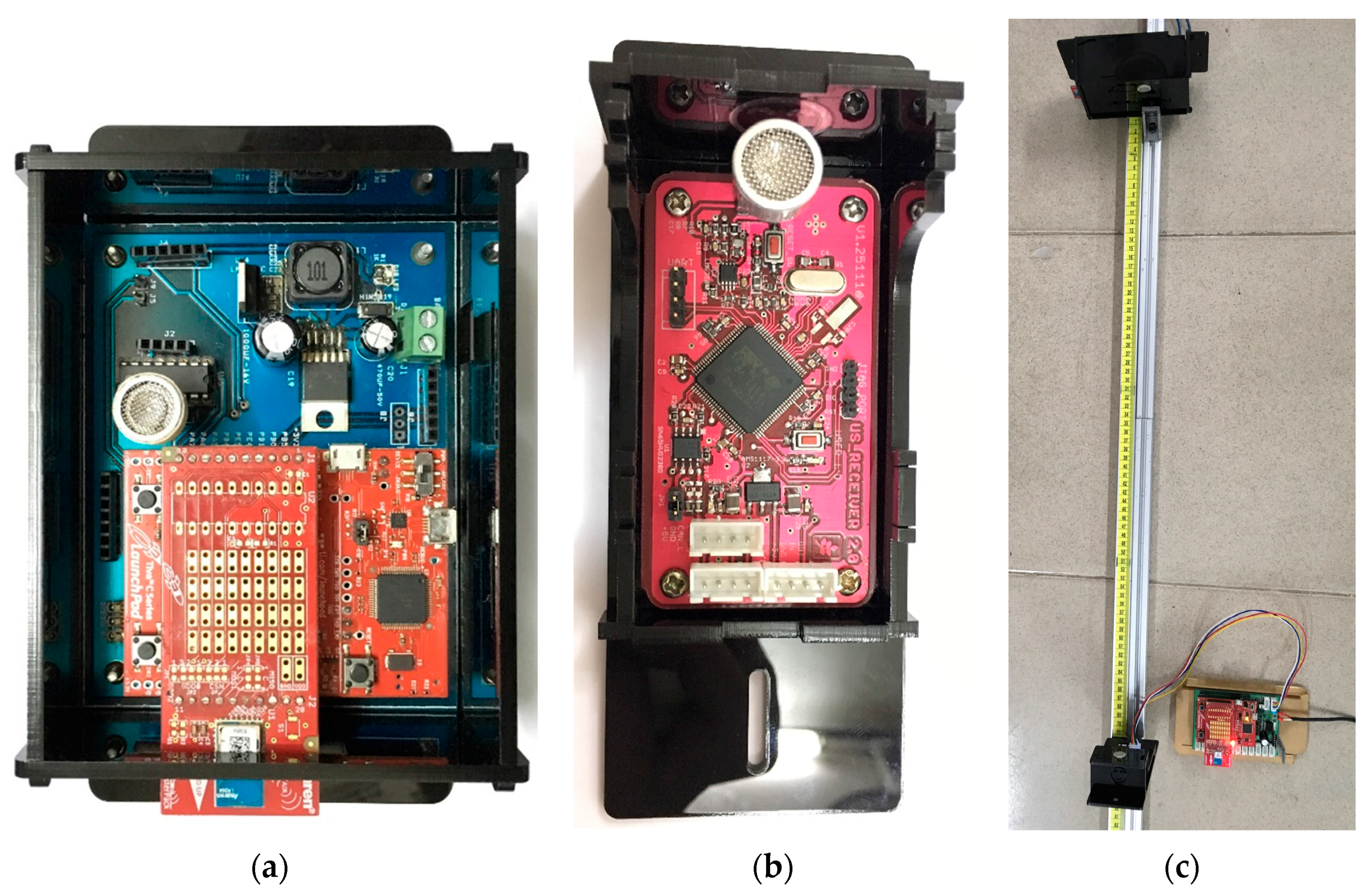
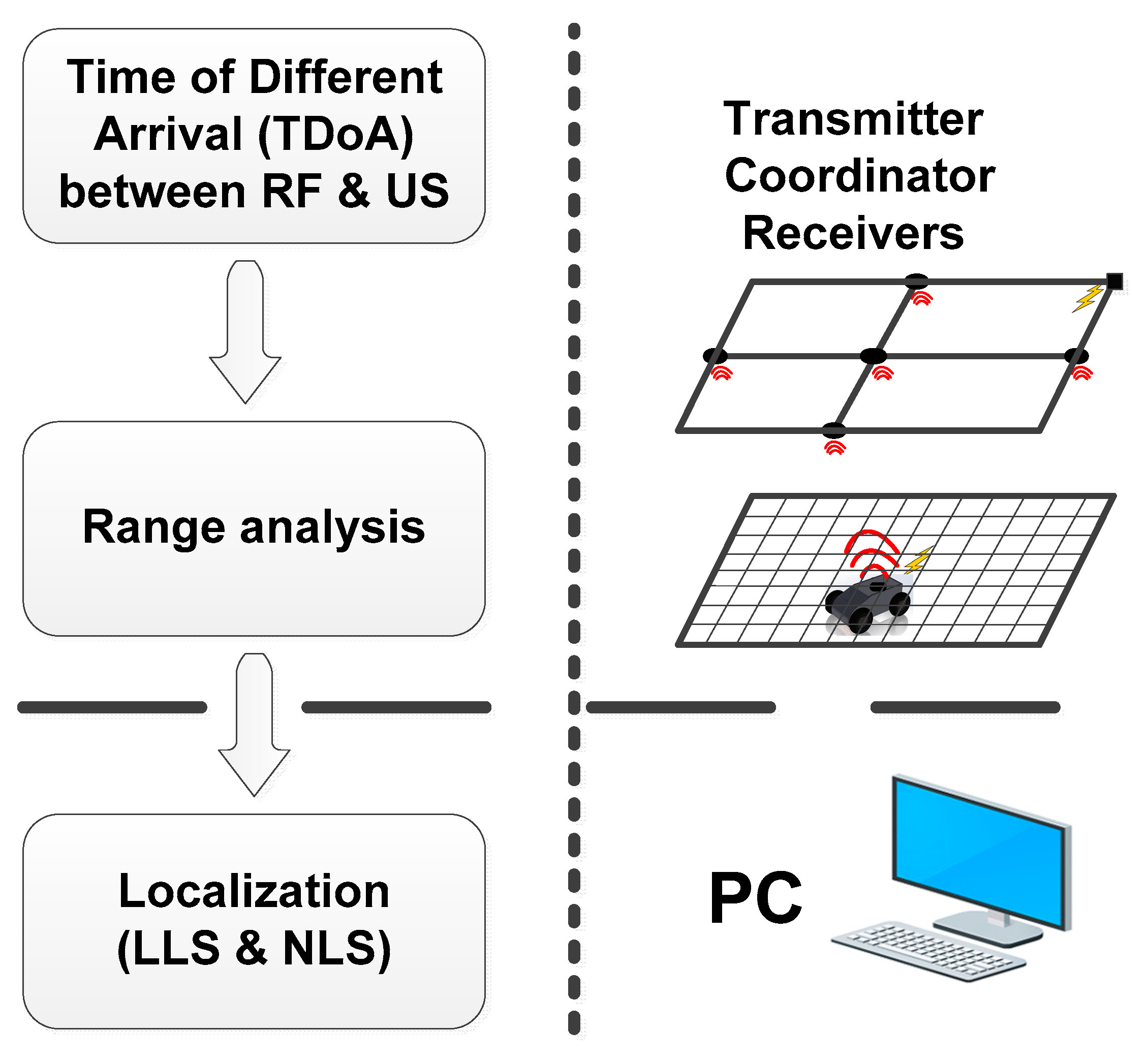
2.2. Design and Operation
3. Algorithms and Implementation
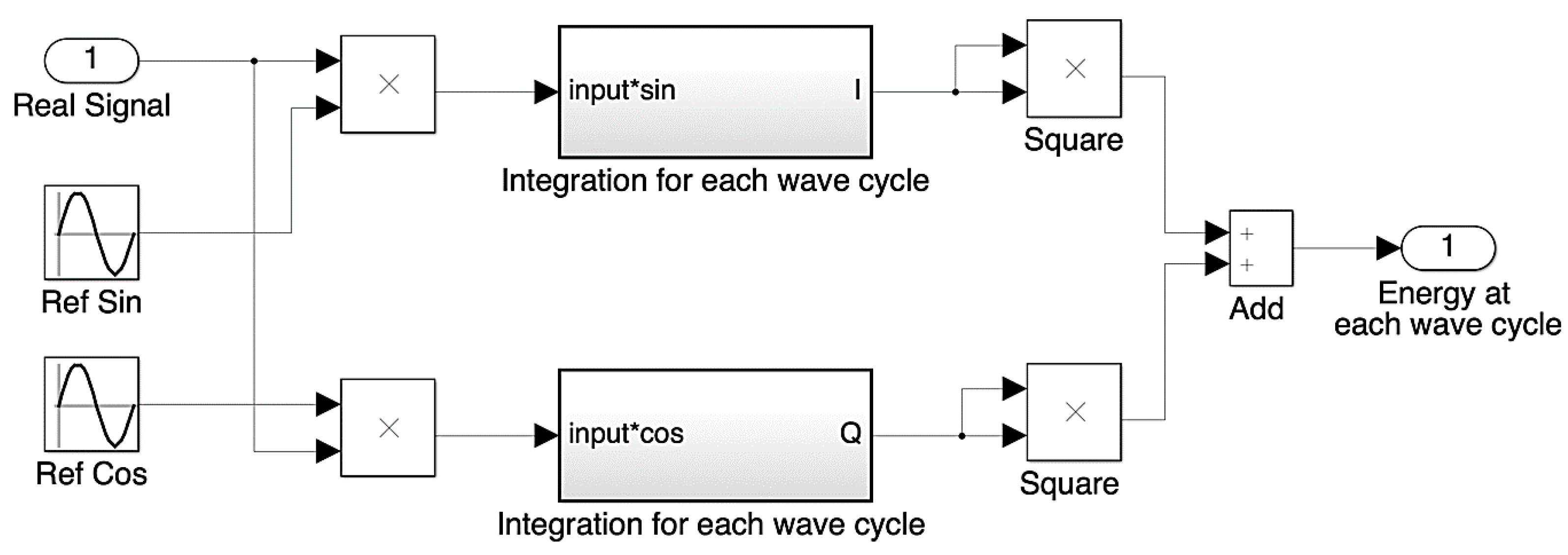
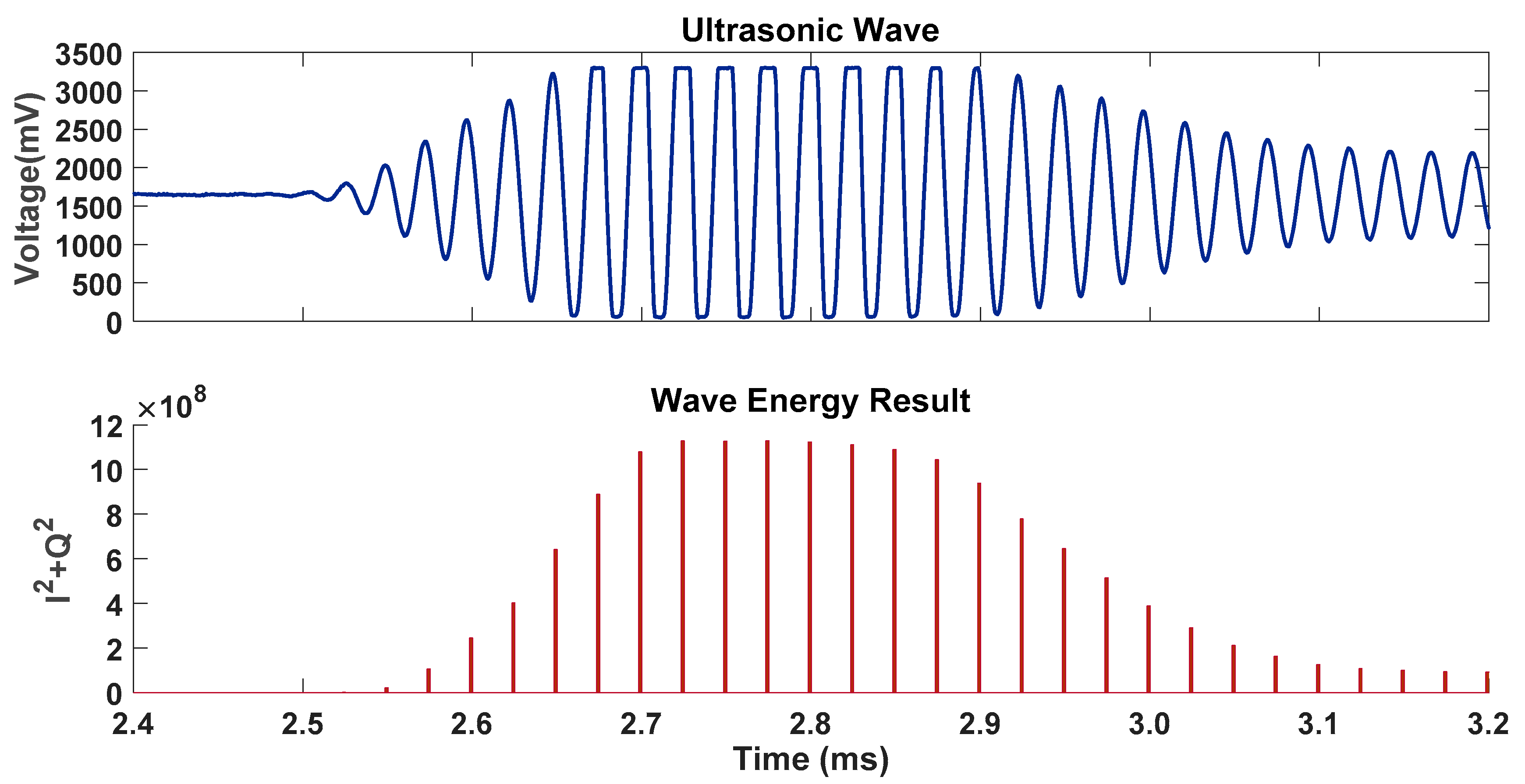
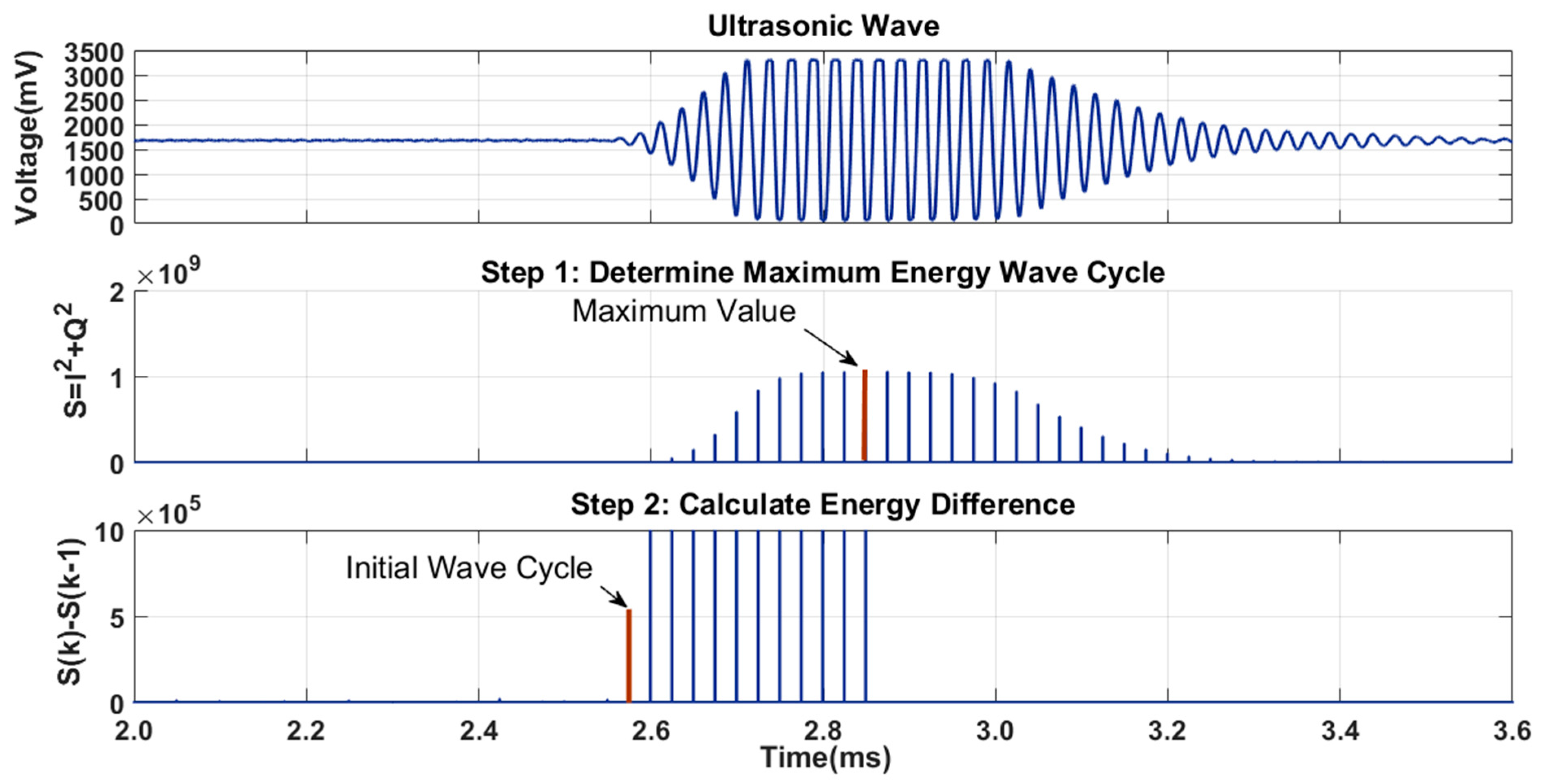
3.1. Sine Wave Detection Algorithm
3.2. Implementation and Simulation Result
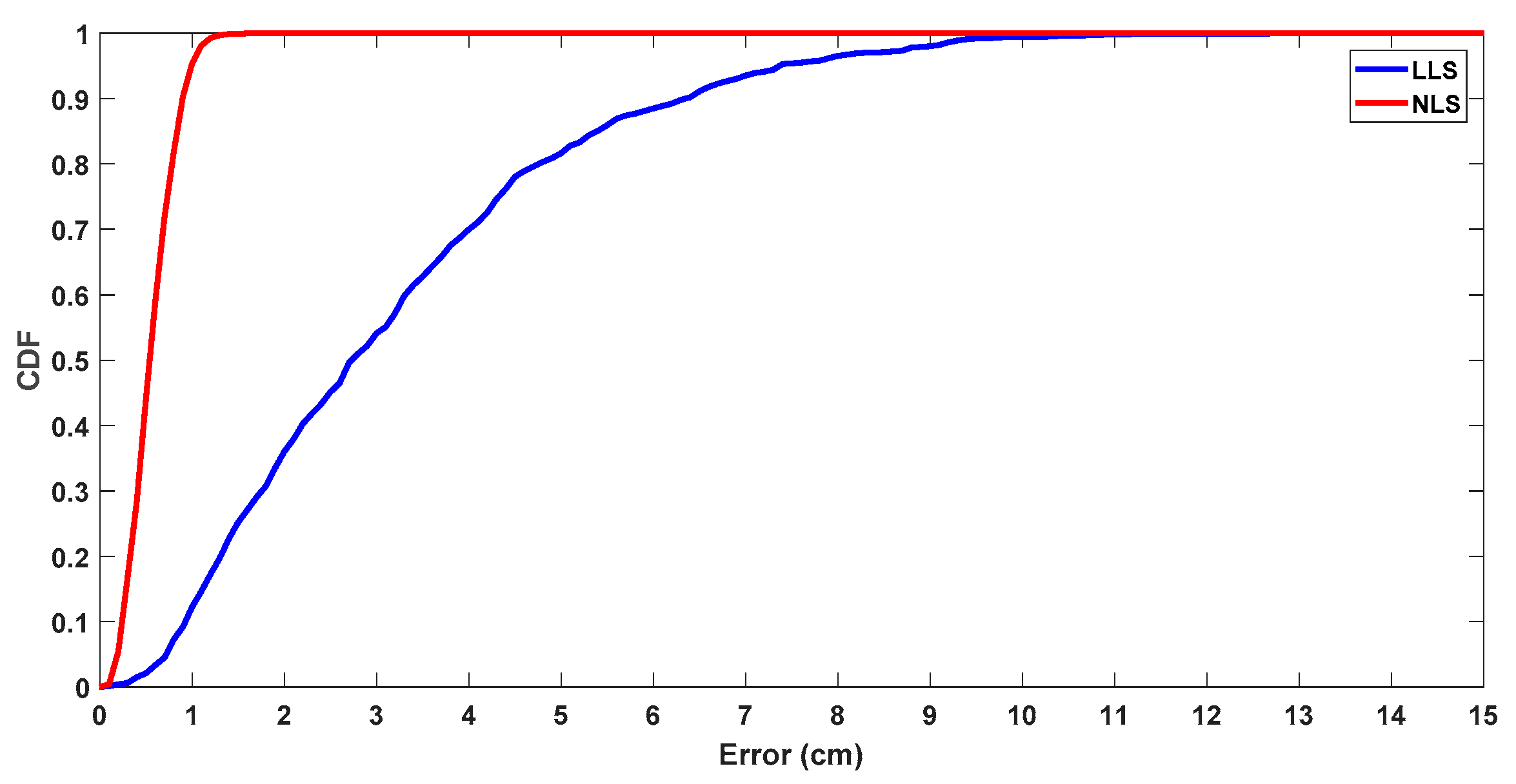
3.3. Least Square Problem
| Algorithm 1: Pseudo code for C implementation of general NLS method |
| do { k = k + 1; x(k) = x(k−1) + Δx; if (F( x(k) ) > F( x(k−1) ) ) break; } while (k < kmax) |
| Algorithm 2: Pseudo code for C implementation of Gauss–Newton iterative method. |
| do { k = k + 1; if (J is full rank) { x(k) = x(k−1) + hgn; delta = F( x(k−1) ) − F( x(k) ); } else { break; } } while ((delta > threshold) && (k < kmax)) |
3.4. Implementation and Simulation Results
| Algorithm 3: Pseudo code for MATLAB implementation of generating test data and evaluation of their errors |
| for i = 1 to N original_point(i) = random(1, 2) * workspace_dimension; for j = 1 to k dij(j) = distance(original_point (i), reference_node(j) ); end estimated_point_LLS(i) = Linear_least_squares(reference_node, dij); estimated_point_NLS(i) = Nonlinear_least_squares(reference_node, dij); error_LLS(i) = distance(estimated_point_LLS(i), original_point(i) ); error_NLS(i) = distance(estimated_point_NLS(i), original_point(i) ); end |
4. Experimental Results
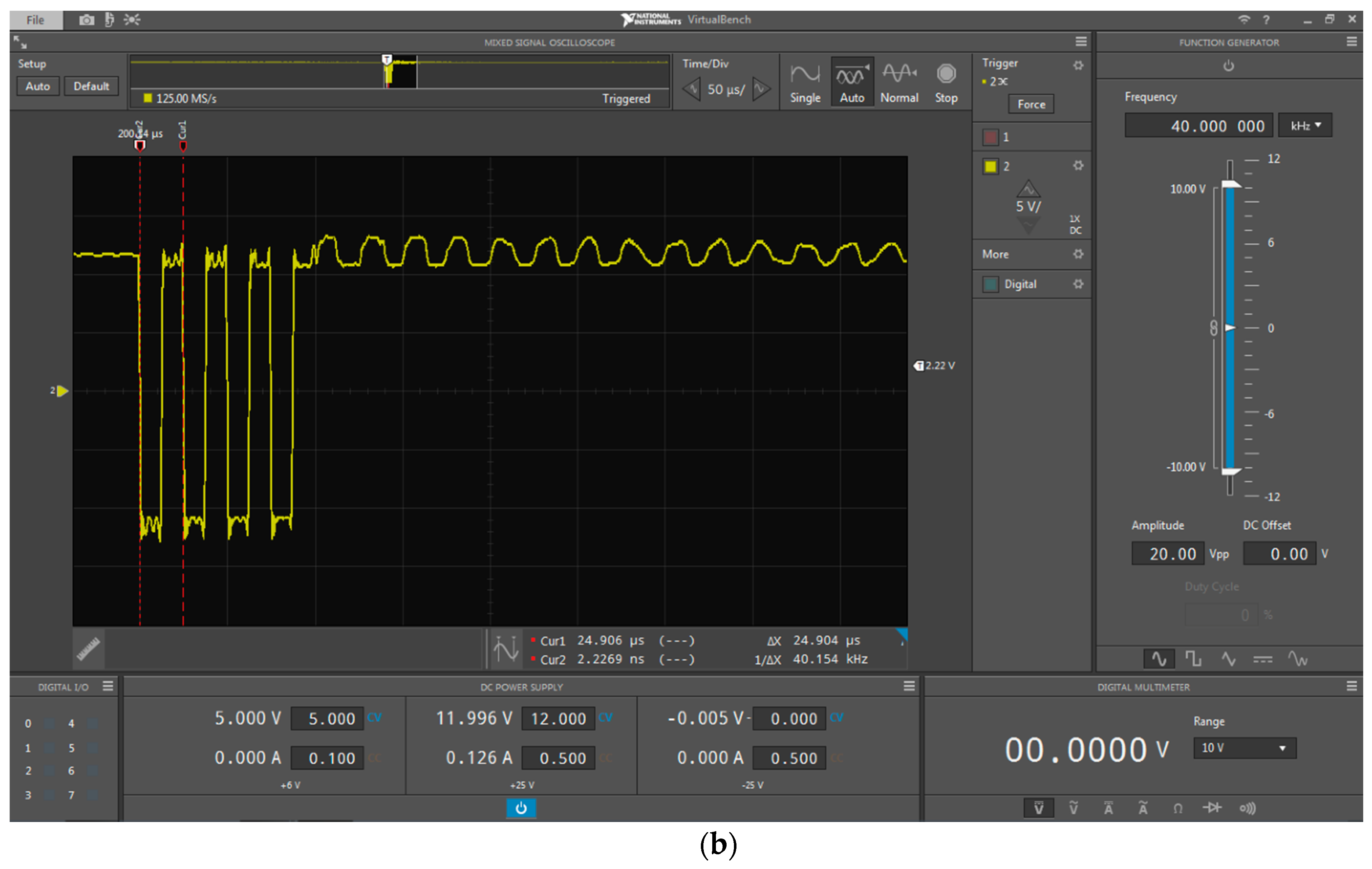
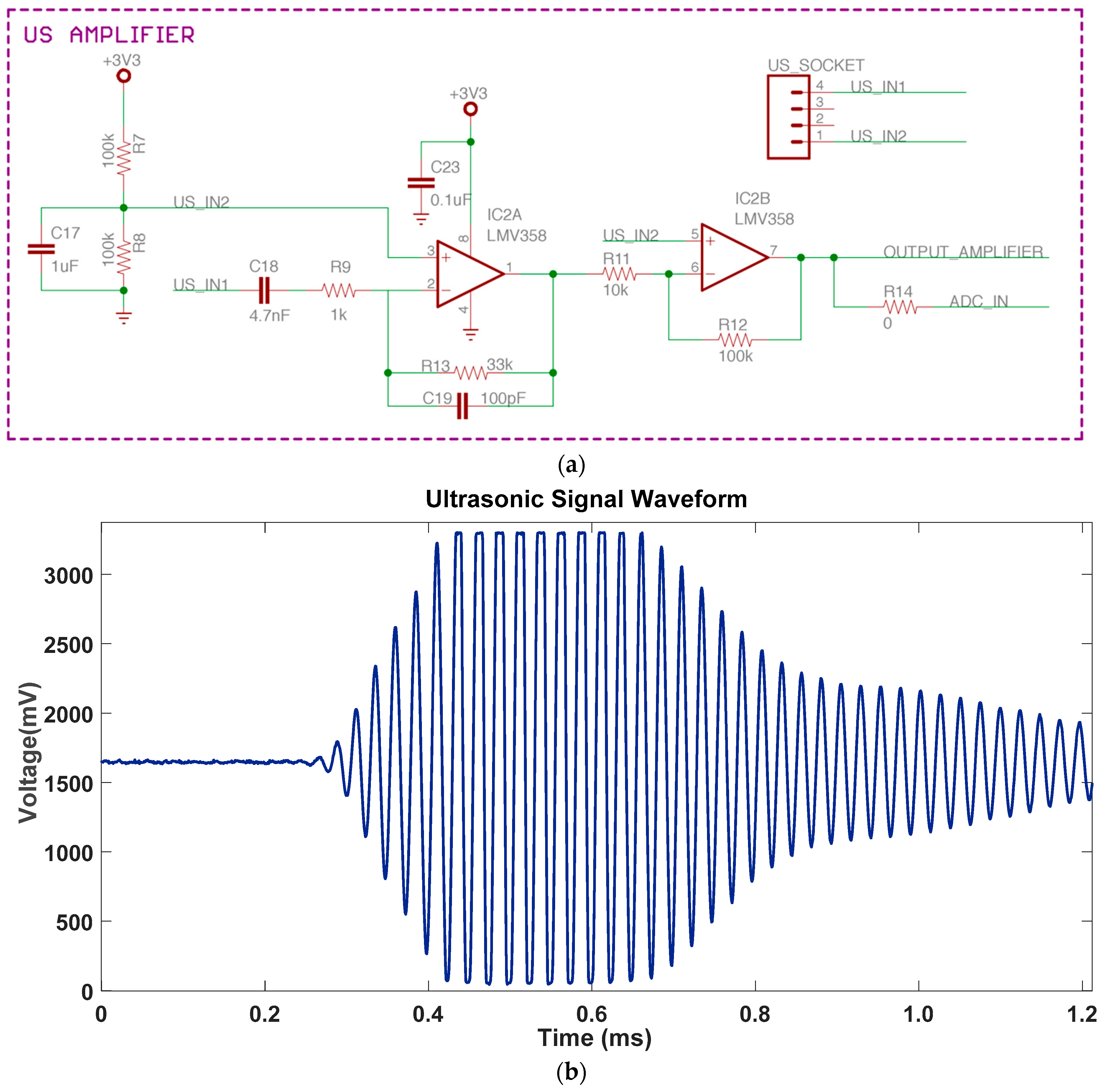
4.1. Sine Wave Detector
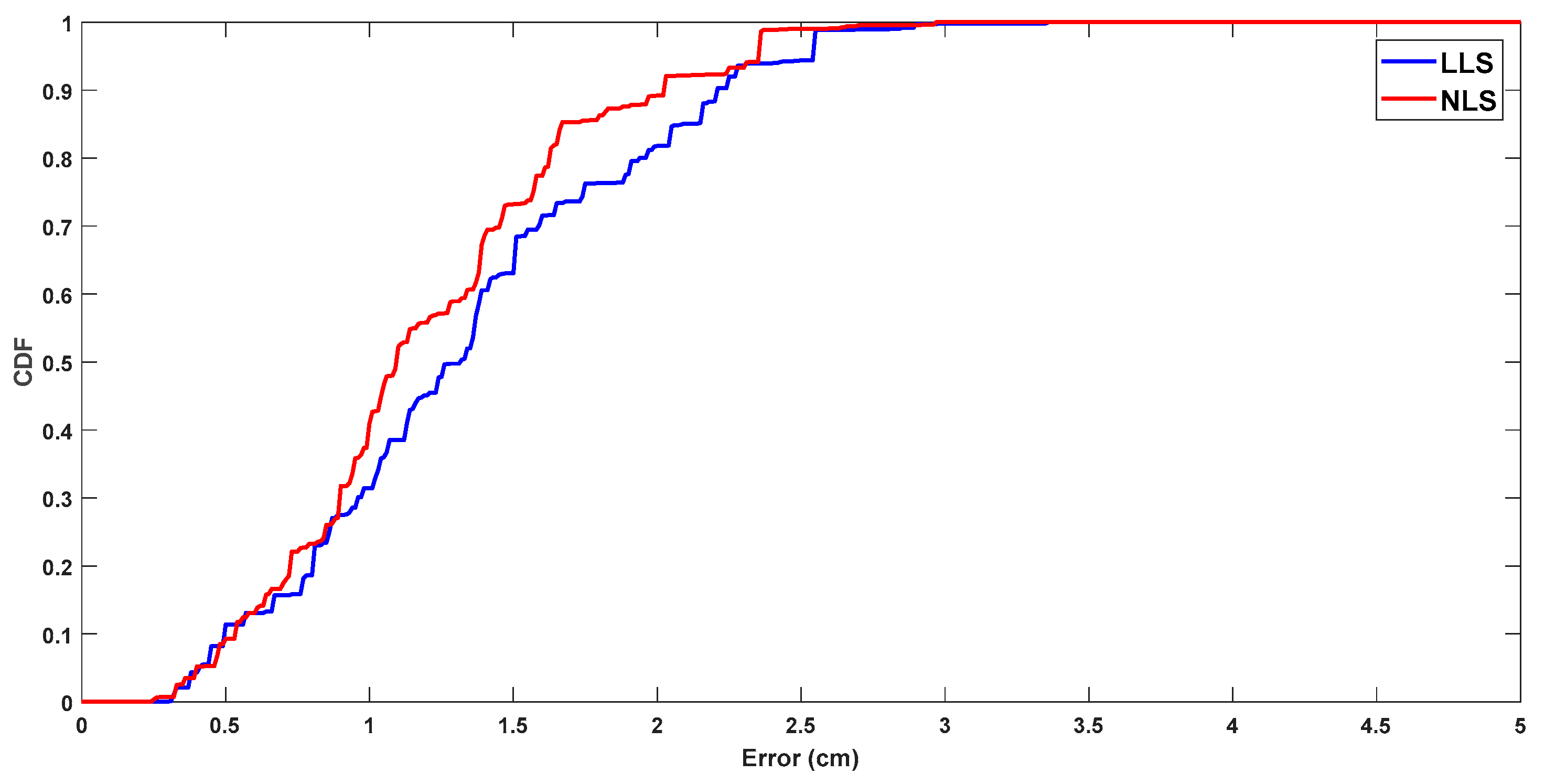
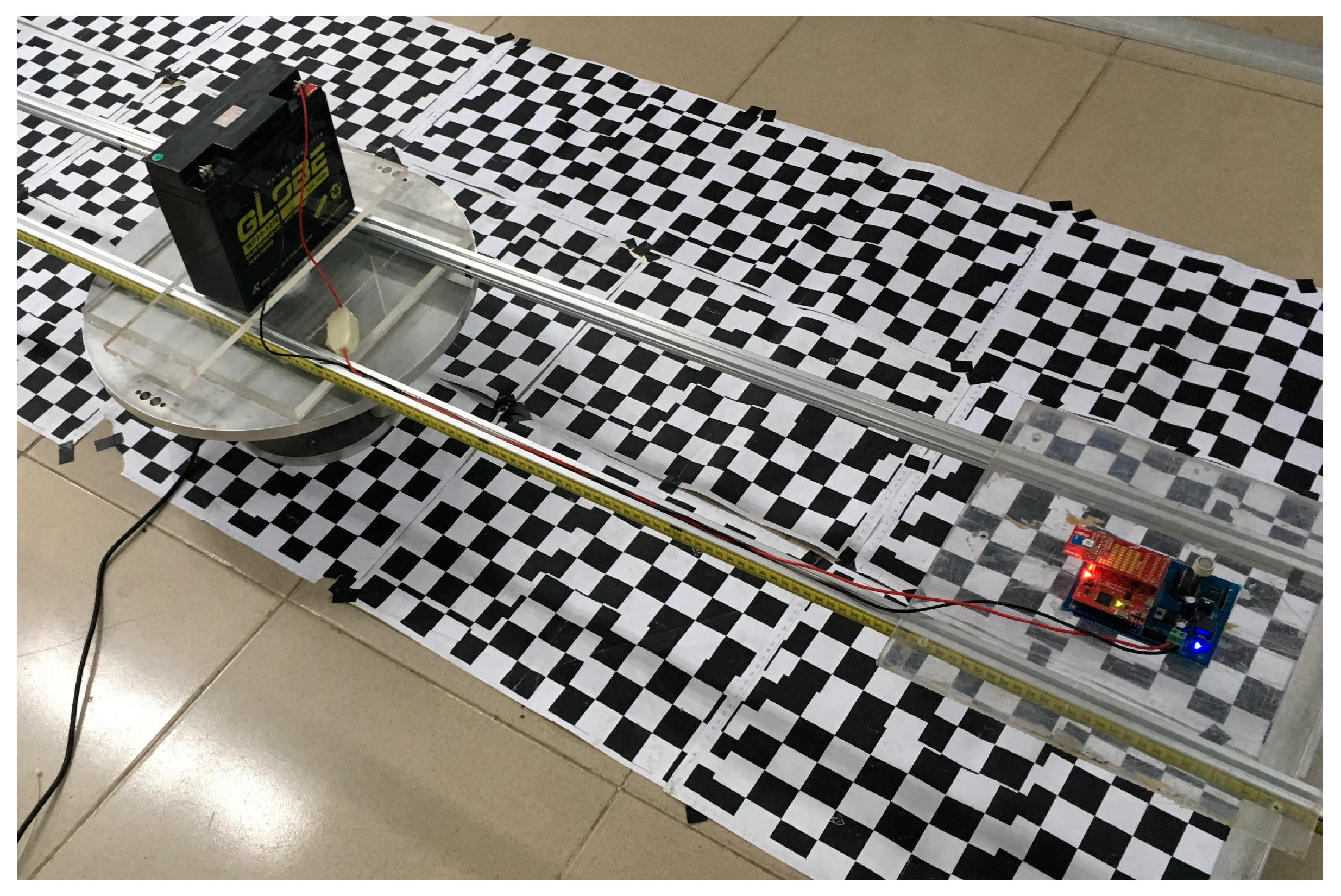
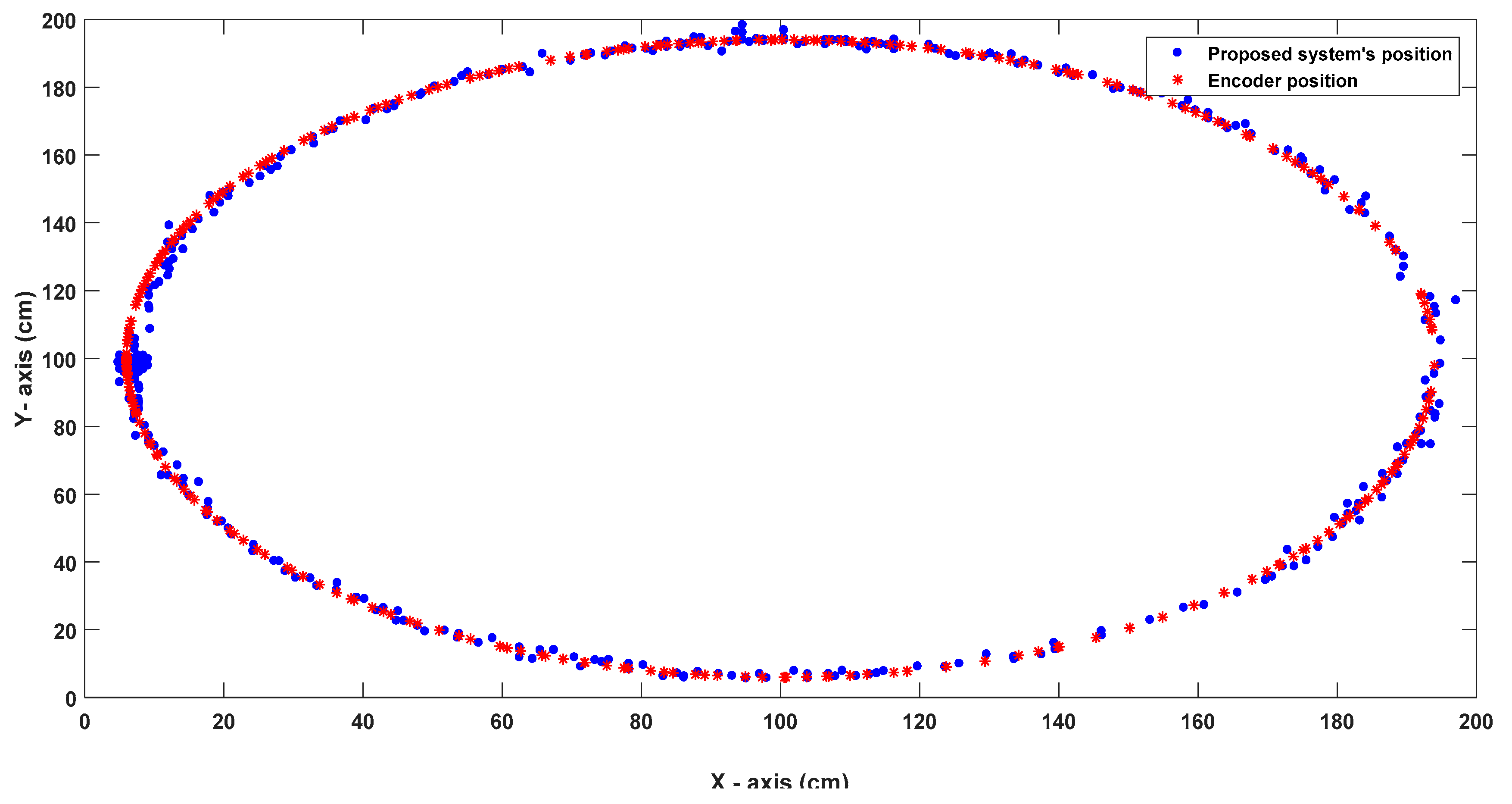
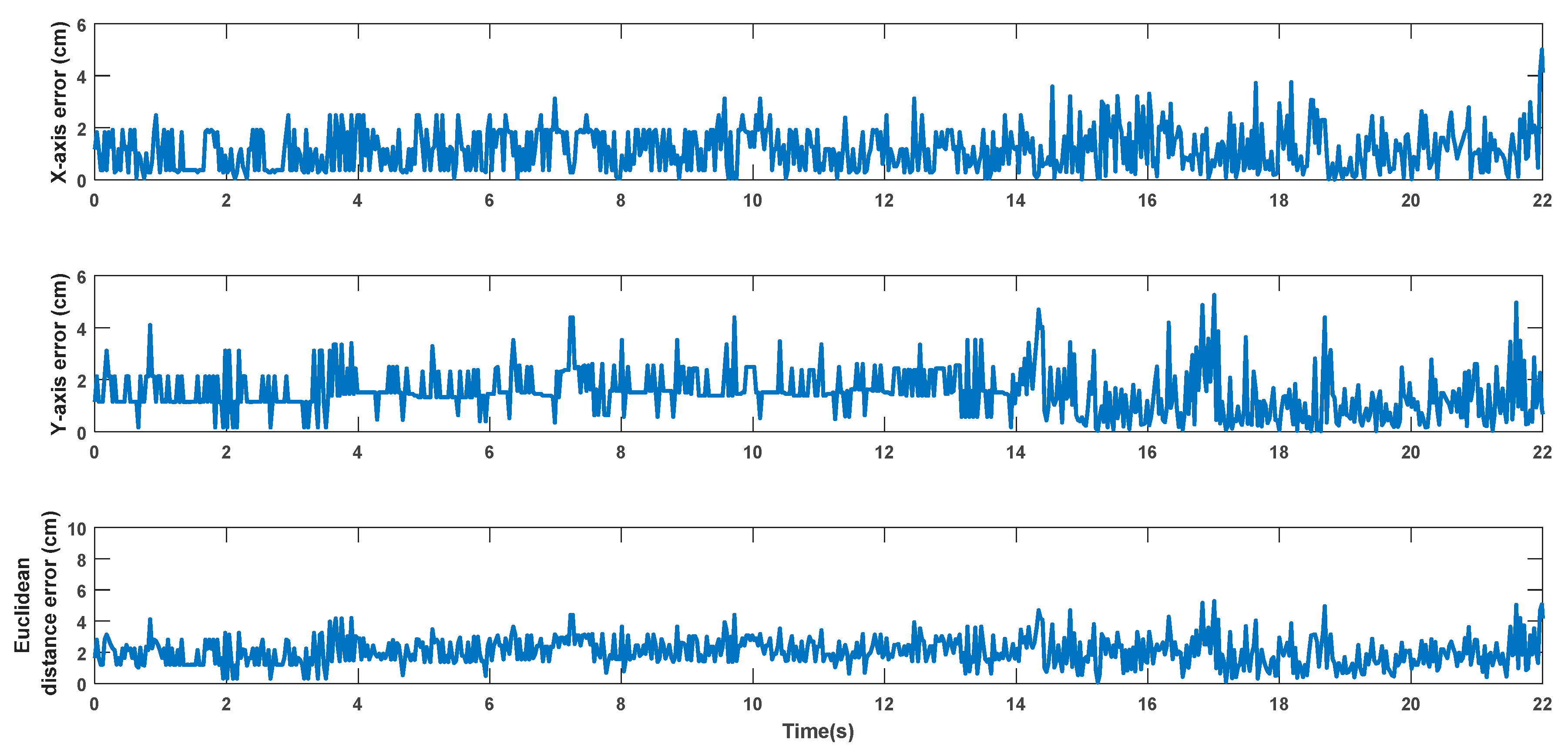
4.2. Least Square Algorithms
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A Survey of Indoor Positioning Systems for Wireless Personal Networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Al Nuaimi, K.; Kamel, H. A Survey of Indoor Positioning Systems and Algorithms. In Proceedings of the International Conference on Innovations in Information Technology (IIT), Abu Dhabi, UAE, 25–27 April 2011. [Google Scholar]
- Koyuncu, H.; Yang, S.H. A Survey of Indoor Positioning and Object Locating Systems. IJCSNS Int. J. Comput. Sci. Netw. Secur. 2010, 10, 121–128. [Google Scholar]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor Positioning: A Review of Indoor Ultrasonic Positioning systems. In Proceedings of the 15th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 27–30 January 2013. [Google Scholar]
- Song, Z.; Jiang, G.; Huang, C. A Survey on Indoor Positioning Technologies. Theor. Math. Found. Comput. Sci. 2011, 198–206. [Google Scholar] [CrossRef]
- Harter, A.; Hopper, A. A Distributed Location System for the Active Office. IEEE Netw. 1994, 8, 62–70. [Google Scholar] [CrossRef]
- Ward, A.; Jones, A.; Hopper, A. A New Location Technique for the Active Office. IEEE Pers. Commun. 1997, 4, 42–47. [Google Scholar] [CrossRef]
- Harter, A.; Hopper, A.; Steggles, P.; Ward, A.; Webster, P. The anatomy of a context-aware application. Wirel. Netw. 2002, 8, 187–197. [Google Scholar] [CrossRef]
- Priyantha, N.B. The Cricket Indoor Location System. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, June 2005. [Google Scholar]
- MIT Computer Science and Artificial Intelligence Lab Cambridge. Cricket v2 User Manual. Available online: http://cricket.csail.mit.edu/ (accessed on 29 July 2017).
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. UltraWideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Ubisense. Ubisense Series 7000 IP Sensors Specifications. Available online: http://www.rfidstore.it/en/rtls-systems/34-sensore-7000-.html (accessed on 29 July 2017).
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 1–12. [Google Scholar]
- Cho, B.; Seo, W.; Moon, W.; Baek, K. Positioning of a Mobile Robot Based on Odometry and a New Ultrasonic LPS. Int. J. Control Autom. Syst. 2013, 11, 333–345. [Google Scholar] [CrossRef]
- Kim, S.J.; Kim, B.K. Dynamic Ultrasonic Hybrid Localization System for Indoor Mobile Robots. IEEE Trans. Ind. Elect. 2013, 60, 4562–4573. [Google Scholar] [CrossRef]
- Girard, G.; Cote, S.; Zlatanova, S.; Barette, Y.; St-Pierre, J.; Van Osterom, P. Indoor Pedestrian Navigation Using Foot-Mounted IMU and Portable Ultrasound Range Sensors. Sensors 2011, 11, 7606–7624. [Google Scholar] [CrossRef] [PubMed]
- Ko, N.Y.; Kuc, T.Y. Fusing Range Measurements from Ultrasonic Beacons and a Laser Range Finder for Localization of a Mobile Robot. Sensors 2015, 15, 11050–11075. [Google Scholar] [CrossRef] [PubMed]
- Jimenez Ruiz, A.R.; Granja, F.S.; Prieto Honorato, J.C.; Guevara Rosas, J.I. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef]
- Pham, D.D.; Suh, Y.S. Pedestrian Navigation Using Foot-Mounted Inertial Sensor and LIDAR. Sensors 2016, 16, 120. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.-S.; Huynh, T.-H. Experimental Study of Trilateration Algorithms for Ultrasound-Based Positioning System on QNX RTOS. In Proceedings of the IEEE International Conference on Real-time Computing and Robotics (RCAR), Angkor Wat, Cambodia, 6–10 June 2016. [Google Scholar]
- Segers, L.; Tiete, J.; Braeken, A.; Touhafi, A. Ultrasonic Multiple-Access Ranging System Using Spread Spectrum and MEMS Technology for Indoor Localization. Sensors 2014, 14, 3172–3187. [Google Scholar] [CrossRef] [PubMed]
- Segers, L.; Van Bavegem, D.; De Winne, S.; Braeken, A.; Touhafi, A.; Steenhaut, K. An Ultrasonic Multiple-Access Ranging Core Based on Frequency Shift Keying Towards Indoor Localization. Sensors 2015, 15, 18641–18665. [Google Scholar] [CrossRef] [PubMed]
- Medina, C.; Segura, J.C.; de la Torre, A. Ultrasound Indoor Positioning System Based on a Low-Power Wireless Sensor Network Providing Sub-Centimeter Accuracy. Sensors 2013, 13, 3501–3526. [Google Scholar] [CrossRef] [PubMed]
- Murphy, W.S., Jr.; Hereman, W. Determination of a Position in Three Dimensions Using Trilateration and Approximate Distances. Decis. Sci. 1995, 7, 19–43. [Google Scholar]
- Fraley, C. Algorithms for Nonlinear Least-Squares Problems; Technical Report SOL 88-16; Systems Optimization Laboratory, Department of Operations Research, Stanford University: Stanford, CA, USA, 1988. [Google Scholar]
- Luenberger, D.G.; Ye, Y. Linear and Nonlinear Programming; Springer US: New York, NY, USA, 2008. [Google Scholar]
- Madsen, K.; Nielsen, H.; Tingleff, O. Methods for Non-Linear Least Squares Problems; Technical University of Denmark: Kongens Lyngby, Denmark, 2004; Available online: http://www2.imm.dtu.dk/pubdb/views/publication_details.php?id=3215 (accessed on 29 July 2017).
- International Organization for Standardization. Road Vehicles—Controller Area Network (CAN)—Part 1: Data Link Layer and Physical Signaling; ISO 11898–1:2003; ISO: Geneva, Switzerland, 2003. [Google Scholar]
- International Organization for Standardization. Road Vehicles—Controller Area Network (CAN)—Part 2: High-Speed Medium Access Unit; ISO 11898–2:2003; ISO: Geneva, Switzerland, 2003. [Google Scholar]
- Robert Bosch GmbH. CAN Specification Version 2.0; Robert Bosch GmbH: Stuttgart, Germany, 1991. [Google Scholar]
- Texas Instrument. Application Report: Introduction to the Controller Area Network (CAN); Texas Instrument: Dallas, TX, USA, 2008. [Google Scholar]
- Pendergrass, M. Applied Mathematics: A Sine Wave Detector; Hampden-Sydney College: Hampden Sydney, VA, USA, 2008. [Google Scholar]
- De Angelis, A.; Moschitta, A.; Carbone, P.; Calderini, M.; Neri, S.; Borgna, R.; Peppucci, M. Design and Characterization of a Portable Ultrasonic Indoor 3-D Positioning System. IEEE Trans. Instrum. Meas. 2015, 64, 2616–2625. [Google Scholar] [CrossRef]
- Fukuju, Y.; Minami, M.; Morikawa, H.; Aoyama, T. DOLPHIN: An Autonomous Indoor Positioning System in Ubiquitous Computing Environment. In Proceedings of the IEEE Workshop on Software Technologies for Future Embedded Systems, Hokkaido, Japan, 15–16 May 2003. [Google Scholar]
- Knauth, S.; Andrushevich, A.; Kaufmann, L.; Kistler, R.; Klapproth, A. The iLoc+ Ultrasound Indoor Localization System for AAL Applications at EvAAL 2012. In Evaluating AAL Systems through Competitive Benchmarking; Springer: Heidelberg, Germany, 2013. [Google Scholar]
- Baunach, M.; Kolla, R.; Mühlberger, C. SNoW Bat: A High Precise WSN Based Location System; Technical Report; University of Würzburg: Würzburg, Germany, 2007. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Average Error (mm) | Maximum Error (mm) |
|---|---|---|
| Proposed method (Sine wave detector) | 2.18 | 6.7 |
| Frequency Shift Keying and Correlation (Single Transmitter at 12 V, Multiple Access Receiver [22] | 8 | 20 |
| Correlation (Portable Ultrasonic Indoor) [34] | 0.9 | ≈2 |
| Sampling instant, detect maximum amplitude (sample rate = 32 kHz) [23] | 4.5 | 8.921 |
| Parabolic interpolation (sample rate = 32 kHz) [23] | 2.11 | 4.172 |
| Parabolic interpolation and phase correction (sample rate = 32 kHz) [23] | 1.692 | 7.528 |
| DSSS (Single-Access Ranging) [24] | Not mentioned | 10 |
| FHSS (Single-Access Ranging) [24] | Not mentioned | 15 |
| Reference Node | R1 | R2 | R3 | R4 | R5 |
|---|---|---|---|---|---|
| Coordinate | (105, 5.8, 206.4) | (204.3, 105.5, 206.4) | (105.5, 204.5, 206.4) | (5.9, 105, 206.4) | (105, 105, 190) |
| Method | Average Error (mm) | Max Error (mm) |
|---|---|---|
| LLS (proposed system) | 13.3 | 33.6 |
| NLS (proposed system) | 12.0 | 29.7 |
| Cricket version 2 [10,11] | 10–30 | Not mentioned |
| Active Bat [8,9] | 80 | ~140 |
| Dolphin [35] | 150 | Not mentioned |
| iLoc [36] | 20 | 100 |
| SNoW Bat [37] | 15.0 | Not mentioned |
| Portable Ultrasonic Indoor [34] | 3.4 | 3.9 |
| Indoor localization application of Frequency Shift Keying and Correlation method [23] | Not mentioned | 50 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-S.; Nguyen, T.-N.; Tran, Q.-S.; Huynh, T.-H. Improvement of Ultrasound-Based Localization System Using Sine Wave Detector and CAN Network. J. Sens. Actuator Netw. 2017, 6, 12. https://doi.org/10.3390/jsan6030012
Nguyen T-S, Nguyen T-N, Tran Q-S, Huynh T-H. Improvement of Ultrasound-Based Localization System Using Sine Wave Detector and CAN Network. Journal of Sensor and Actuator Networks. 2017; 6(3):12. https://doi.org/10.3390/jsan6030012
Chicago/Turabian StyleNguyen, Tan-Sy, Trong-Nghia Nguyen, Quoc-Sang Tran, and Thai-Hoang Huynh. 2017. "Improvement of Ultrasound-Based Localization System Using Sine Wave Detector and CAN Network" Journal of Sensor and Actuator Networks 6, no. 3: 12. https://doi.org/10.3390/jsan6030012
APA StyleNguyen, T.-S., Nguyen, T.-N., Tran, Q.-S., & Huynh, T.-H. (2017). Improvement of Ultrasound-Based Localization System Using Sine Wave Detector and CAN Network. Journal of Sensor and Actuator Networks, 6(3), 12. https://doi.org/10.3390/jsan6030012