
Big Data Management Algorithms, Deep Learning-Based Object Detection Technologies, and Geospatial Simulation and Sensor Fusion Tools in the Internet of Robotic Things
 ,
,  ,
,
Abstract
1. Introduction
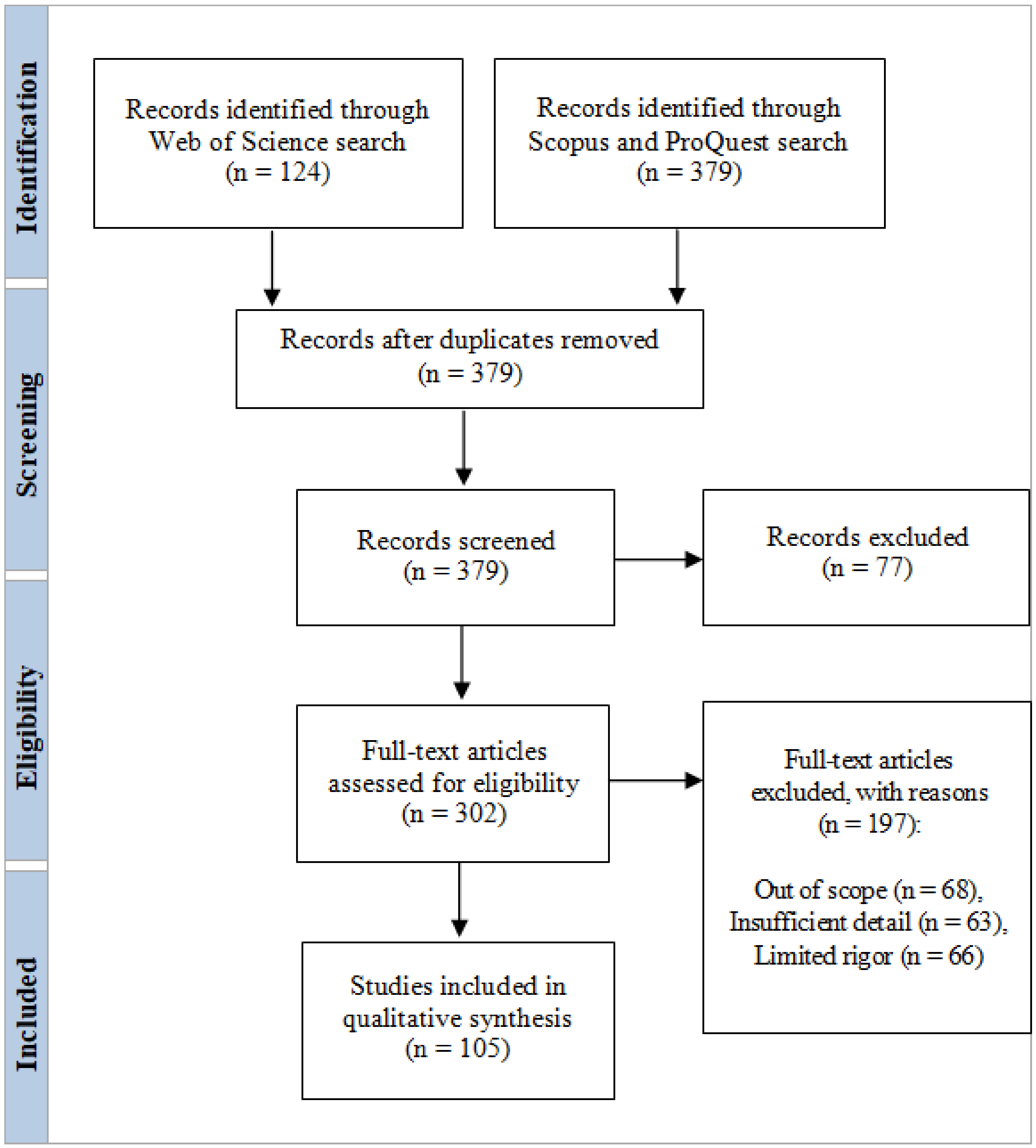
2. Methodology
3. Big Data Management Algorithms in IoRT
4. Deep Learning-Based Object Detection Technologies in IoRT
5. Geospatial Simulation and Sensor Fusion Tools in the IoRT
6. Deployment of CityGML in IoRT
7. Discussion
8. Conclusions
9. Specific Contributions to the Literature
10. Limitations and Further Directions of Research
11. Practical Implications
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ray, P.P. A survey on Internet of Things architectures. J. King Saud Univ.-Comput. Inf. Sci. 2018, 30, 291–319. [Google Scholar] [CrossRef]
- Michalkova, L.; Machova, V.; Carter, D. Digital Twin-based Product Development and Manufacturing Processes in Virtual Space: Data Visualization Tools and Techniques, Cloud Computing Technologies, and Cyber-Physical Production Systems. Econ. Manag. Financ. Mark. 2022, 17, 37–51. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Survey on artificial intelligence based techniques for emerging robotic communication. Telecommun. Syst. 2019, 72, 483–503. [Google Scholar] [CrossRef]
- Beckett, S. Machine and Deep Learning Technologies, Location Tracking and Obstacle Avoidance Algorithms, and Cognitive Wireless Sensor Networks, in Intelligent Transportation Planning and Engineering. Contemp. Read. Law Soc. Justice 2022, 14, 41–56. [Google Scholar] [CrossRef]
- Dachyar, M.; Zagloel, T.Y.M.; Saragih, L.R. Knowledge growth and development: Internet of things (IoT) research, 2006–2018. Heliyon 2019, 5, e02264. [Google Scholar] [CrossRef]
- Ključnikov, A.; Civelek, M.; Vozňáková, I.; Krajčík, V. Can discounts expand local and digital currency awareness of individuals depending on their characteristics? Oeconomia Copernic. 2020, 11, 239–266. [Google Scholar] [CrossRef]
- Yang, K.; Shi, Y.; Zhou, Y.; Yang, Z.; Fu, L.; Chen, W. Federated Machine Learning for Intelligent IoT via Reconfigurable Intelligent Surface. IEEE Netw. 2020, 34, 16–22. [Google Scholar] [CrossRef]
- Vinerean, S.; Budac, C.; Baltador, L.A.; Dabija, D.-C. Assessing the Effects of the COVID-19 Pandemic on M-Commerce Adoption: An Adapted UTAUT2 Approach. Electronics 2022, 11, 1269. [Google Scholar] [CrossRef]
- Suzuki, D.; Kawano, Y. Flexible terahertz imaging systems with single-walled carbon nanotube films. Carbon 2020, 162, 13–24. [Google Scholar] [CrossRef]
- Valaskova, K.; Nagy, M.; Zabojnik, S.; Lăzăroiu, G. Industry 4.0 Wireless Networks and Cyber-Physical Smart Manufacturing Systems as Accelerators of Value-Added Growth in Slovak Exports. Mathematics 2022, 10, 2452. [Google Scholar] [CrossRef]
- Yaacoub, J.-P.A.; Noura, H.N.; Salman, O.; Chehab, A. Robotics cyber security: Vulnerabilities, attacks, countermeasures, and recommendations. Int. J. Inf. Secur. 2022, 21, 115–158. [Google Scholar] [CrossRef]
- Valaskova, K.; Ward, P.; Svabova, L. Deep Learning-assisted Smart Process Planning, Cognitive Automation, and Industrial Big Data Analytics in Sustainable Cyber-Physical Production Systems. J. Self-Gov. Manag. Econ. 2021, 9, 9–20. [Google Scholar] [CrossRef]
- Wairagkar, M.; Lima, M.R.; Bazo, D.; Craig, R.; Weissbart, H.; Etoundi, A.C.; Reichenbach, T.; Iyengar, P.; Vaswani, S.; James, C.; et al. Emotive Response to a Hybrid-Face Robot and Translation to Consumer Social Robots. IEEE Internet Things J. 2022, 9, 3174–3188. [Google Scholar] [CrossRef]
- Peters, E. Urban Computing Algorithms, Virtual Sensor Networks, and Geospatial Data Visualization in Digital Twin Cities. Geopolit. Hist. Int. Relat. 2022, 14, 75–90. [Google Scholar] [CrossRef]
- Zhong, Y.; Chen, L.; Dan, C.; Rezaeipanah, A. A systematic survey of data mining and big data analysis in internet of things. J Supercomput. 2022, 78, 18405–18453. [Google Scholar] [CrossRef]
- Andronie, M.; Lăzăroiu, G.; Ștefănescu, R.; Ionescu, L.; Cocoșatu, M. Neuromanagement decision-making and cognitive algorithmic processes in the technological adoption of mobile commerce apps. Oeconomia Copernic. 2021, 12, 1033–1062. [Google Scholar] [CrossRef]
- Zhang, F.; Yu, J.; Lin, D.; Zhang, J. UnIC: Towards Unmanned Intelligent Cluster and Its Integration into Society. Engineering 2022, 12, 24–38. [Google Scholar] [CrossRef]
- Lăzăroiu, G.; Andronie, M.; Iatagan, M.; Geamănu, M.; Ștefănescu, R.; Dijmărescu, I. Deep Learning-Assisted Smart Process Planning, Robotic Wireless Sensor Networks, and Geospatial Big Data Management Algorithms in the Internet of Manufacturing Things. ISPRS Int. J. Geo-Inf. 2022, 11, 277. [Google Scholar] [CrossRef]
- Catak, F.O.; Kuzlu, M.; Catak, E.; Cali, U.; Unal, D. Security concerns on machine learning solutions for 6G networks in mmWave beam prediction. Phys. Commun. 2022, 52, 101626. [Google Scholar] [CrossRef]
- Lyons, N. Deep Learning-based Computer Vision Algorithms, Immersive Analytics and Simulation Software, and Virtual Reality Modeling Tools in Digital Twin-driven Smart Manufacturing. Econ. Manag. Financ. Mark. 2022, 17, 67–81. [Google Scholar] [CrossRef]
- Chae, B. The evolution of the Internet of Things (IoT): A computational text analysis. Telecommun. Policy 2019, 43, 101848. [Google Scholar] [CrossRef]
- Poliak, M.; Jurecki, R.; Buckner, K. Autonomous Vehicle Routing and Navigation, Mobility Simulation and Traffic Flow Prediction Tools, and Deep Learning Object Detection Technology in Smart Sustainable Urban Transport Systems. Contemp. Read. Law Soc. Justice 2022, 14, 25–40. [Google Scholar] [CrossRef]
- Martínez, S.S.; García, A.S.; Estévez, E.E.; Ortega, J.G.; García, J.G. 3D object recognition for anthropomorphic robots performing tracking tasks. Int. J. Adv. Manuf. Technol. 2019, 104, 1403–1412. [Google Scholar] [CrossRef]
- Andronie, M.; Lăzăroiu, G.; Iatagan, M.; Uță, C.; Ștefănescu, R.; Cocoșatu, M. Artificial Intelligence-Based Decision-Making Algorithms, Internet of Things Sensing Networks, and Deep Learning-Assisted Smart Process Management in Cyber-Physical Production Systems. Electronics 2021, 10, 2497. [Google Scholar] [CrossRef]
- Rodriguez Lera, F.J.; Rico, F.M.; Olivera, V.M. Neural Networks for Recognizing Human Activities in Home-like Environments. Integr. Comput.-Aided Eng. 2019, 26, 37–47. [Google Scholar] [CrossRef]
- Nica, E.; Stan, C.I.; Luțan (Petre), A.G.; Oașa (Geambazi), R.-Ș. Internet of Things-based Real-Time Production Logistics, Sustainable Industrial Value Creation, and Artificial Intelligence-driven Big Data Analytics in Cyber-Physical Smart Manufacturing Systems. Econ. Manag. Financ. Mark. 2021, 16, 52–62. [Google Scholar] [CrossRef]
- Kamilaris, A.; Botteghi, N. The penetration of Internet of Things in robotics: Towards a web of robotic things. J. Ambient. Intell. Smart Environ. 2020, 12, 491–512. [Google Scholar] [CrossRef]
- Balcerzak, A.P.; Nica, E.; Rogalska, E.; Poliak, M.; Klieštik, T.; Sabie, O.-M. Blockchain Technology and Smart Contracts in Decentralized Governance Systems. Adm. Sci. 2022, 12, 96. [Google Scholar] [CrossRef]
- Alamer, A. A secure anonymous tracing fog-assisted method for the Internet of Robotic Things. Libr. Hi Tech 2020, 40, 1081–1103. [Google Scholar] [CrossRef]
- Kliestik, T.; Poliak, M.; Popescu, G.H. Digital Twin Simulation and Modeling Tools, Computer Vision Algorithms, and Urban Sensing Technologies in Immersive 3D Environments. Geopolit. Hist. Int. Relat. 2022, 14, 9–25. [Google Scholar] [CrossRef]
- Aarizou, M.L.; Berrached, N.-E. ROS-based Telerobotic Application for Transmitting High-bandwidth Kinematic Data over a Limited Network. Int. J. Control Autom. Syst. 2019, 17, 445–453. [Google Scholar] [CrossRef]
- Popescu, G.H.; Petreanu, S.; Alexandru, B.; Corpodean, H. Internet of Things-based Real-Time Production Logistics, Cyber-Physical Process Monitoring Systems, and Industrial Artificial Intelligence in Sustainable Smart Manufacturing. J. Self-Gov. Manag. Econ. 2021, 9, 52–62. [Google Scholar] [CrossRef]
- Cho, S.; Shrestha, B.; Jang, W.; Seo, C. Trajectory tracking optimization of mobile robot using artificial immune system. Multimed. Tools Appl. 2019, 78, 3203–3220. [Google Scholar] [CrossRef]
- Potcovaru, A.-M.; Majerová, J. Multi-Sensor Fusion Technology, Spatial Simulation and Environment Mapping Algorithms, and Real-World Connected Vehicle Data in Smart Sustainable Urban Mobility Systems. Contemp. Read. Law Soc. Justice 2022, 14, 105–120. [Google Scholar] [CrossRef]
- Givehchi, O.; Landsdorf, K.; Simoens, P.; Colombo, A.W. Interoperability for Industrial Cyber-Physical Systems: An Approach for Legacy Systems. IEEE Trans. Ind. Inform. 2017, 13, 3370–3378. [Google Scholar] [CrossRef]
- Suler, P.; Palmer, L.; Bilan, S. Internet of Things Sensing Networks, Digitized Mass Production, and Sustainable Organizational Performance in Cyber-Physical System-based Smart Factories. J. Self-Gov. Manag. Econ. 2021, 9, 42–51. [Google Scholar] [CrossRef]
- Huang, H.-P.; Yan, J.-L.; Huang, T.-H.; Huang, M.-B. IoT-based networking for humanoid robots. J. Chin. Inst. Eng. 2017, 40, 603–613. [Google Scholar] [CrossRef]
- Papík, M.; Papíková, L. Application of selected data mining techniques in unintentional accounting error detection. Equilibrium. Q. J. Econ. Econ. Policy 2021, 16, 185–201. [Google Scholar] [CrossRef]
- Farmani, N.; Sun, L.; Pack, D.J. A Scalable Multitarget Tracking System for Cooperative Unmanned Aerial Vehicles. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1947–1961. [Google Scholar] [CrossRef]
- Andronie, M.; Lăzăroiu, G.; Ștefănescu, R.; Uță, C.; Dijmărescu, I. Sustainable, Smart, and Sensing Technologies for Cyber-Physical Manufacturing Systems: A Systematic Literature Review. Sustainability 2021, 13, 5495. [Google Scholar] [CrossRef]
- Sabri, L.; Bouznad, S.; Rama Fiorini, S.; Chibani, A.; Prestes, E.; Amirat, Y. An Integrated Semantic Framework for Designing Context-aware Internet of Robotic Things Systems. Integr. Comput.-Aided Eng. 2018, 25, 137–156. [Google Scholar] [CrossRef]
- Kovacova, M.; Novak, A.; Machova, V.; Carey, B. 3D Virtual Simulation Technology, Digital Twin Modeling, and Geospatial Data Mining in Smart Sustainable City Governance and Management. Geopolit. Hist. Int. Relat. 2022, 14, 43–58. [Google Scholar] [CrossRef]
- Gomez, M.A.; Chibani, A.; Amirat, Y.; Matson, E.T. IoRT cloud survivability framework for robotic AALs using HARMS. Robot. Auton. Syst. 2018, 106, 192–206. [Google Scholar] [CrossRef]
- Małkowska, A.; Urbaniec, M.; Kosała, M. The impact of digital transformation on European countries: Insights from a comparative analysis. Equilibrium. Q. J. Econ. Econ. Policy 2021, 16, 325–355. [Google Scholar] [CrossRef]
- Chen, W.; Yaguchi, Y.; Naruse, K.; Watanobe, Y.; Nakamura, K. QoS-Aware Robotic Streaming Workflow Allocation in Cloud Robotics Systems. IEEE Trans. Serv. Comput. 2021, 14, 544–558. [Google Scholar] [CrossRef]
- Lăzăroiu, G.; Ionescu, L.; Andronie, M.; Dijmărescu, I. Sustainability Management and Performance in the Urban Corporate Economy: A Systematic Literature Review. Sustainability 2020, 12, 7705. [Google Scholar] [CrossRef]
- Dmitriev, A.S.; Mokhseni, T.I.; Sierra Teran, K.M. Differentially Coherent Information Transmission Based on Chaotic Radio Pulses. J. Commun. Technol. Electron. 2018, 63, 1183–1190. [Google Scholar] [CrossRef]
- Durana, P.; Krastev, V.; Buckner, K. Digital Twin Modeling, Multi-Sensor Fusion Technology, and Data Mining Algorithms in Cloud and Edge Computing-based Smart City Environments. Geopolit. Hist. Int. Relat. 2022, 14, 91–106. [Google Scholar] [CrossRef]
- Achroufene, A.; Amirat, Y.; Chibani, A. RSS-Based Indoor Localization Using Belief Function Theory. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1163–1180. [Google Scholar] [CrossRef]
- Lăzăroiu, G.; Kliestik, T.; Novak, A. Internet of Things Smart Devices, Industrial Artificial Intelligence, and Real-Time Sensor Networks in Sustainable Cyber-Physical Production Systems. J. Self-Gov. Manag. Econ. 2021, 9, 20–30. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, W.; Pan, S.; Li, Y.; Chen, Y. Analyzing the robotic behavior in a smart city with deep enforcement and imitation learning using IoRT. Comput. Commun. 2020, 150, 346–356. [Google Scholar] [CrossRef]
- Pop, R.-A.; Dabija, D.-C.; Pelău, C.; Dinu, V. Usage Intentions, Attitudes, and Behaviors towards Energy-Efficient Applications during the COVID-19 Pandemic. J. Bus. Econ. Manag. 2022, 23, 668–689. [Google Scholar] [CrossRef]
- Chen, C.W. Internet of Video Things: Next-Generation IoT with Visual Sensors. IEEE Internet Things J. 2020, 7, 6676–6685. [Google Scholar] [CrossRef]
- Konecny, V.; Jaśkiewicz, M.; Downs, S. Motion Planning and Object Recognition Algorithms, Vehicle Navigation and Collision Avoidance Technologies, and Geospatial Data Visualization in Network Connectivity Systems. Contemp. Read. Law Soc. Justice 2022, 14, 89–104. [Google Scholar] [CrossRef]
- Nejkovic, V.; Petrovic, N.; Tosic, M.; Milosevic, N. Semantic approach to RIoT autonomous robots mission coordination. Robot. Auton. Syst. 2020, 126, 103438. [Google Scholar] [CrossRef]
- Kovacova, M.; Lăzăroiu, G. Sustainable Organizational Performance, Cyber-Physical Production Networks, and Deep Learning-assisted Smart Process Planning in Industry 4.0-based Manufacturing Systems. Econ. Manag. Financ. Mark. 2021, 16, 41–54. [Google Scholar] [CrossRef]
- Shenkoya, T. Social change: A comparative analysis of the impact of the IoT in Japan, Germany and Australia. Internet Things 2020, 11, 100250. [Google Scholar] [CrossRef]
- Kovacova, M.; Lewis, E. Smart Factory Performance, Cognitive Automation, and Industrial Big Data Analytics in Sustainable Manufacturing Internet of Things. J. Self-Gov. Manag. Econ. 2021, 9, 9–21. [Google Scholar] [CrossRef]
- Singh, S.K.; Rathore, S.; Park, J.H. BlockIoTIntelligence: A Blockchain-enabled Intelligent IoT Architecture with Artificial Intelligence. Future Gener. Comput. Syst. 2020, 110, 721–743. [Google Scholar] [CrossRef]
- Zvarikova, K.; Horak, J.; Downs, S. Digital Twin Algorithms, Smart City Technologies, and 3D Spatio-Temporal Simulations in Virtual Urban Environments. Geopolit. Hist. Int. Relat. 2022, 14, 139–154. [Google Scholar] [CrossRef]
- Lu, J.; Wang, G.; Tao, X.; Wang, J.; Törngren, M. A domain-specific modeling approach supporting tool-chain development with Bayesian network models. Integr. Comput.-Aided Eng. 2020, 27, 153–171. [Google Scholar] [CrossRef]
- Barbu, C.M.; Florea, D.L.; Dabija, D.C.; Barbu, M.C.R. Customer Experience in Fintech. J. Theor. Appl. Electron. Commer. Res. 2021, 16, 1415–1433. [Google Scholar] [CrossRef]
- Sarkar, M.; Homaifar, A.; Erol, B.A.; Behniapoor, M.; Tunstel, E. PIE: A Tool for Data-Driven Autonomous UAV Flight Testing. J. Intell. Robot. Syst. 2020, 98, 421–438. [Google Scholar] [CrossRef]
- Lăzăroiu, G.; Harrison, A. Internet of Things Sensing Infrastructures and Data-driven Planning Technologies in Smart Sustainable City Governance and Management. Geopolit. Hist. Int. Relat. 2021, 13, 23–36. [Google Scholar] [CrossRef]
- Islam, M.S.; Rahman, M.M.; Muhammad, G.; Hossain, M.S. Design of A Social Robot Interact with Artificial Intelligence by Versatile Control Systems. IEEE Sens. J. 2021, 22, 17542–17549. [Google Scholar] [CrossRef]
- Nica, E.; Stehel, V. Internet of Things Sensing Networks, Artificial Intelligence-based Decision-Making Algorithms, and Real-Time Process Monitoring in Sustainable Industry 4.0. J. Self-Gov. Manag. Econ. 2021, 9, 35–47. [Google Scholar] [CrossRef]
- Roda-Sanchez, L.; Olivares, T.; Garrido-Hidalgo, C.; de la Vara, J.L.; Fernández-Caballero, A. Human-robot interaction in Industry 4.0 based on an Internet of Things real-time gesture control system. Integr. Comput. -Aided Eng. 2021, 28, 159–175. [Google Scholar] [CrossRef]
- Kliestik, T.; Musa, H.; Machova, V.; Rice, L. Remote Sensing Data Fusion Techniques, Autonomous Vehicle Driving Perception Algorithms, and Mobility Simulation Tools in Smart Transportation Systems. Contemp. Read. Law Soc. Justice 2022, 14, 137–152. [Google Scholar] [CrossRef]
- Mishra, D.; Zema, N.R.; Natalizio, E. A High-End IoT Devices Framework to Foster Beyond-Connectivity Capabilities in 5G/B5G Architecture. IEEE Commun. Mag. 2021, 59, 55–61. [Google Scholar] [CrossRef]
- Cug, J.; Suler, P.; Taylor, E. Digital Twin-based Cyber-Physical Production Systems in Immersive 3D Environments: Virtual Modeling and Simulation Tools, Spatial Data Visualization Techniques, and Remote Sensing Technologies. Econ. Manag. Financ. Mark. 2022, 17, 82–96. [Google Scholar] [CrossRef]
- Balakrishnan, N.; Rajendran, A.; Pelusi, D.; Ponnusamy, V. Deep Belief Network enhanced intrusion detection system to prevent security breach in the Internet of Things. Internet Things 2021, 14, 100112. [Google Scholar] [CrossRef]
- Markauskas, M.; Baliute, A. Technological progress spillover effect in Lithuanian manufacturing industry. Equilibrium. Q. J. Econ. Econ. Policy 2021, 16, 783–806. [Google Scholar] [CrossRef]
- Mukherjee, A.; Dey, N.; Mondal, A.; De, D.; Crespo, R.G. iSocialDrone: QoS aware MQTT middleware for social internet of drone things in 6G-SDN slice. Soft Comput. 2021, 1–17. [Google Scholar] [CrossRef]
- Andronie, M.; Lăzăroiu, G.; Iatagan, M.; Hurloiu, I.; Dijmărescu, I. Sustainable Cyber-Physical Production Systems in Big Data-Driven Smart Urban Economy: A Systematic Literature Review. Sustainability 2021, 13, 751. [Google Scholar] [CrossRef]
- Siriweera, A.; Naruse, K. Internet of Cross-chains: Model-driven Cross-chain as a Service Platform for the Internet of Everything in Smart City. IEEE Consum. Electron. Mag. 2021, 1. [Google Scholar] [CrossRef]
- Robinson, R. Digital Twin Modeling in Virtual Enterprises and Autonomous Manufacturing Systems: Deep Learning and Neural Network Algorithms, Immersive Visualization Tools, and Cognitive Data Fusion Techniques. Econ. Manag. Financ. Mark. 2022, 17, 52–66. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Xu, L.; Yuan, H. Data replication techniques in the Internet of Things: A systematic literature review. Libr. Hi Tech 2021, 39, 1121–1136. [Google Scholar] [CrossRef]
- Wallace, S.; Lăzăroiu, G. Predictive Control Algorithms, Real-World Connected Vehicle Data, and Smart Mobility Technologies in Intelligent Transportation Planning and Engineering. Contemp. Read. Law Soc. Justice 2021, 13, 79–92. [Google Scholar] [CrossRef]
- Opiyo, S.; Zhou, J.; Mwangi, E.; Kai, W.; Sunusi, I. A Review on Teleoperation of Mobile Ground Robots: Architecture and Situation Awareness. Int. J. Control Autom. Syst. 2021, 19, 1384–1407. [Google Scholar] [CrossRef]
- Praitheeshan, P.; Pan, L.; Zheng, X.; Jolfaei, A.; Doss, R. SolGuard: Preventing external call issues in smart contract-based multi-agent robotic systems. Inf. Sci. 2021, 579, 150–166. [Google Scholar] [CrossRef]
- Ali, Z.H.; Ali, H.A. Towards sustainable smart IoT applications architectural elements and design: Opportunities, challenges, and open directions. J. Supercomput. 2021, 77, 5668–5725. [Google Scholar] [CrossRef]
- Nazerdeylami, A.; Majidi, B.; Movaghar, A. Autonomous litter surveying and human activity monitoring for governance intelligence in coastal eco-cyber-physical systems. Ocean. Coast. Manag. 2021, 200, 105478. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.; Ma, O.; Ansari, M.S.; Lee, B. Predictive Estimation of Optimal Signal Strength from Drones over IoT Frameworks in Smart Cities. IEEE Trans. Mob. Comput. 2021, 22, 402–416. [Google Scholar] [CrossRef]
- Bazan, P.; Estevez, E. Industry 4.0 and business process management: State of the art and new challenges. Bus. Process Manag. J. 2022, 28, 62–80. [Google Scholar] [CrossRef]
- Fiorini, L.; Mancioppi, G.; Semeraro, F.; Fujita, H.; Cavallo, F. Unsupervised emotional state classification through physiological parameters for social robotics applications. Knowl.-Based Syst. 2020, 190, 105217. [Google Scholar] [CrossRef]
- Lujak, M.; Sklar, E.; Semet, F. Agriculture fleet vehicle routing: A decentralised and dynamic problem. AI Commun. 2021, 34, 55–71. [Google Scholar] [CrossRef]
- Mallaki, M.; Majidi, B.; Peyvandi, A.; Movaghar, A. Off-chain management and state-tracking of smart programs on blockchain for secure and efficient decentralized computation. Int. J. Comput. Appl. 2021, 44, 822–829. [Google Scholar] [CrossRef]
- Wei, D.; Chen, L.; Zhao, L.; Zhou, H.; Huang, B. A Vision-Based Measure of Environmental Effects on Inferring Human Intention During Human Robot Interaction. IEEE Sens. J. 2022, 22, 4246–4256. [Google Scholar] [CrossRef]
- Fang, L.; Sun, M. Motion recognition technology of badminton players in sports video images. Future Gener. Comput. Syst. 2021, 124, 381–389. [Google Scholar] [CrossRef]
- Kar, P.; Misra, S.; Mandal, A.K.; Wang, H. SOS: NDN Based Service-Oriented Game-Theoretic Efficient Security Scheme for IoT Networks. IEEE Trans. Netw. Serv. Manag. 2021, 18, 3197–3208. [Google Scholar] [CrossRef]
- Costa, S.D.; Barcellos, M.P.; Falbo, R.d.A. Ontologies in human–computer interaction: A systematic literature review. Appl. Ontol. 2021, 16, 421–452. [Google Scholar] [CrossRef]
- Hao, X.; Gao, Y.; Yang, X.; Wang, J. Multi-objective collaborative optimization in cement calcination process: A time domain rolling optimization method based on Jaya algorithm. J. Process Control. 2021, 105, 117–128. [Google Scholar] [CrossRef]
- Casadei, R.; Viroli, M.; Audrito, G.; Pianini, D.; Damiani, F. Engineering collective intelligence at the edge with aggregate processes. Eng. Appl. Artif. Intell. 2021, 97, 104081. [Google Scholar] [CrossRef]
- Alamer, A.; Basudan, S. Security and privacy of network transmitted system in the Internet of Robotic Things. J. Supercomput. 2022, 78, 18361–18378. [Google Scholar] [CrossRef]
- Tolba, A.; Al-Makhadmeh, Z. Modular interactive computation scheme for the internet of things assisted robotic services. Swarm Evol. Comput. 2022, 70, 101043. [Google Scholar] [CrossRef]
- Gul, O.M.; Erkmen, A.M.; Kantarci, B. UAV-Driven Sustainable and Quality-Aware Data Collection in Robotic Wireless Sensor Networks. IEEE Internet Things J. 2022, 9, 25150–25164. [Google Scholar] [CrossRef]
- Wang, F.; Wang, H.; Dehghan, O.R. Machine Learning Techniques and Big Data Analysis for Internet of Things Applications: A Review Study. Cybern. Syst. 2022, 1–41. [Google Scholar] [CrossRef]
- Heidari, A.; Navimipour, N.J.; Unal, M. Applications of ML/DL in the management of smart cities and societies based on new trends in information technologies: A systematic literature review. Sustain. Cities Soc. 2022, 85, 104089. [Google Scholar] [CrossRef]
- Biazi-Neto, V.; Marques, C.A.F.; Frizera-Neto, A.; Leal-Junior, A.G. FBG-Embedded Robotic Manipulator Tool for Structural Integrity Monitoring From Critical Strain-Stress Pair Estimation. IEEE Sens. J. 2022, 22, 5695–5702. [Google Scholar] [CrossRef]
- Xu, M.; Wang, J. Learning strategy for continuous robot visual control: A multi-objective perspective. Knowl.-Based Syst. 2022, 252, 109448. [Google Scholar] [CrossRef]
- Albiero, D.; Pontin Garcia, A.; Kiyoshi Umezu, C.; Leme de Paulo, R. Swarm robots in mechanized agricultural operations: A review about challenges for research. Comput. Electron. Agric. 2022, 193, 106608. [Google Scholar] [CrossRef]
- Ji, X.; Chen, K.; Chen, M.; Li, Y.; Qian, X. Secure olympics games with technology: Intelligent border surveillance for the 2022 Beijing winter olympics. J. Syst. Archit. 2022, 129, 102634. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Liu, X.; Bu, X.; Li, H.; Lyu, Q. Industrial internet platforms: Applications in BF ironmaking. Ironmak. Steelmak. 2022, 49, 905–916. [Google Scholar] [CrossRef]
- Talmale, R.; Bhat, M.N. Energy Attentive and Pre-fault Recognize Mechanism for Distributed Wireless Sensor Network Using Fuzzy Logic Approach. Wirel. Pers. Commun. 2021, 124, 1263–1280. [Google Scholar] [CrossRef]
- Kumar, R.; Amgoth, T. Reinforcement learning based connectivity restoration in wireless sensor networks. Appl. Intell. 2022, 52, 13214–13231. [Google Scholar] [CrossRef]
- Bal-Domańska, B.; Sobczak, E.; Stańczyk, E. A multivariate approach to the identification of initial smart specialisations of Polish voivodeships. Equilibrium. Q. J. Econ. Econ. Policy 2020, 15, 785–810. [Google Scholar] [CrossRef]
- Liu, N.; Xu, Z.; Skare, M. The research on COVID-19 and economy from 2019 to 2020: Analysis from the perspective of bibliometrics. Oeconomia Copernic. 2021, 12, 217–268. [Google Scholar] [CrossRef]
- Świadek, A.; Gorączkowska, J. The institutional support for an innovation cooperation in industry: The case of Poland. Equilibrium. Q. J. Econ. Econ. Policy 2020, 15, 811–831. [Google Scholar] [CrossRef]
- Lăzăroiu, G.; Androniceanu, A.; Grecu, I.; Grecu, G.; Neguriță, O. Artificial Intelligence-based Decision-Making Algorithms, Internet of Things Sensing Networks, and Sustainable Cyber-Physical Management Systems in Big Data-driven Cognitive Manufacturing. Oeconomia Copernic. 2022, 13, 1045–1078. [Google Scholar] [CrossRef]
- Nica, E.; Poliak, M.; Popescu, G.H.; Pârvu, I.-A. Decision Intelligence and Modeling, Multisensory Customer Experiences, and Socially Interconnected Virtual Services across the Metaverse Ecosystem. Linguist. Philos. Investig. 2022, 21, 137–153. [Google Scholar] [CrossRef]
- Kliestik, T.; Vochozka, M.; Vasić, M. Biometric Sensor Technologies, Visual Imagery and Predictive Modeling Tools, and Ambient Sound Recognition Software in the Economic Infrastructure of the Metaverse. Rev. Contemp. Philos. 2022, 21, 72–88. [Google Scholar] [CrossRef]
- Valaskova, K.; Vochozka, M.; Lăzăroiu, G. Immersive 3D Technologies, Spatial Computing and Visual Perception Algorithms, and Event Modeling and Forecasting Tools on Blockchain-based Metaverse Platforms. Anal. Metaphys. 2022, 21, 74–90. [Google Scholar] [CrossRef]
- Zvarikova, K.; Cug, J.; Hamilton, S. Virtual Human Resource Management in the Metaverse: Immersive Work Environments, Data Visualization Tools and Algorithms, and Behavioral Analytics. Psychosociol. Issues Hum. Resour. Manag. 2022, 10, 7–20. [Google Scholar] [CrossRef]
- Andronie, M.; Lăzăroiu, G.; Karabolevski, O.L.; Ștefănescu, R.; Hurloiu, I.; Dijmărescu, A.; Dijmărescu, I. Remote Big Data Management Tools, Sensing and Computing Technologies, and Visual Perception and Environment Mapping Algorithms in the Internet of Robotic Things. Electronics 2023, 12, 22. [Google Scholar] [CrossRef]
- Kliestik, T.; Novak, A.; Lăzăroiu, G. Live Shopping in the Metaverse: Visual and Spatial Analytics, Cognitive Artificial Intelligence Techniques and Algorithms, and Immersive Digital Simulations. Linguist. Philos. Investig. 2022, 21, 187–202. [Google Scholar] [CrossRef]
- Zauskova, A.; Miklencicova, R.; Popescu, G.H. Visual Imagery and Geospatial Mapping Tools, Virtual Simulation Algorithms, and Deep Learning-based Sensing Technologies in the Metaverse Interactive Environment. Rev. Contemp. Philos. 2022, 21, 122–137. [Google Scholar] [CrossRef]
- Grupac, M.; Husakova, K.; Balica, R.-Ș. Virtual Navigation and Augmented Reality Shopping Tools, Immersive and Cognitive Technologies, and Image Processing Computational and Object Tracking Algorithms in the Metaverse Commerce. Anal. Metaphys. 2022, 21, 210–226. [Google Scholar] [CrossRef]
- Nica, E.; Kliestik, T.; Valaskova, K.; Sabie, O.-M. The Economics of the Metaverse: Immersive Virtual Technologies, Consumer Digital Engagement, and Augmented Reality Shopping Experience. Smart Gov. 2022, 1, 21–34. [Google Scholar] [CrossRef]
- Valaskova, K.; Machova, V.; Lewis, E. Virtual Marketplace Dynamics Data, Spatial Analytics, and Customer Engagement Tools in a Real-Time Interoperable Decentralized Metaverse. Linguist. Philos. Investig. 2022, 21, 105–120. [Google Scholar] [CrossRef]
- Zvarikova, K.; Machova, V.; Nica, E. Cognitive Artificial Intelligence Algorithms, Movement and Behavior Tracking Tools, and Customer Identification Technology in the Metaverse Commerce. Rev. Contemp. Philos. 2022, 21, 171–187. [Google Scholar] [CrossRef]
- Zvarikova, K.; Rowland, Z.; Nica, E. Multisensor Fusion and Dynamic Routing Technologies, Virtual Navigation and Simulation Modeling Tools, and Image Processing Computational and Visual Cognitive Algorithms across Web3-powered Metaverse Worlds. Anal. Metaphys. 2022, 21, 125–141. [Google Scholar] [CrossRef]
- Kral, P.; Janoskova, K.; Dawson, A. Virtual Skill Acquisition, Remote Working Tools, and Employee Engagement and Retention on Blockchain-based Metaverse Platforms. Psychosociol. Issues Hum. Resour. Manag. 2022, 10, 92–105. [Google Scholar] [CrossRef]
- Hudson, J. Internet of Medical Things-driven Remote Monitoring Systems, Big Healthcare Data Analytics, and Wireless Body Area Networks in COVID-19 Detection and Diagnosis. Am. J. Med. Res. 2022, 9, 81–96. [Google Scholar] [CrossRef]
- Blake, R. Metaverse Technologies in the Virtual Economy: Deep Learning Computer Vision Algorithms, Blockchain-based Digital Assets, and Immersive Shared Worlds. Smart Gov. 2022, 1, 35–48. [Google Scholar] [CrossRef]
- Kovacova, M.; Horak, J.; Higgins, M. Behavioral Analytics, Immersive Technologies, and Machine Vision Algorithms in the Web3-powered Metaverse World. Linguist. Philos. Investig. 2022, 21, 57–72. [Google Scholar] [CrossRef]
- Valaskova, K.; Horak, J.; Bratu, S. Simulation Modeling and Image Recognition Tools, Spatial Computing Technology, and Behavioral Predictive Analytics in the Metaverse Economy. Rev. Contemp. Philos. 2022, 21, 239–255. [Google Scholar] [CrossRef]
- Kovacova, M.; Horak, J.; Popescu, G.H. Haptic and Biometric Sensor Technologies, Deep Learning-based Image Classification Algorithms, and Movement and Behavior Tracking Tools in the Metaverse Economy. Anal. Metaphys. 2022, 21, 176–192. [Google Scholar] [CrossRef]
- Zvarikova, K.; Horak, J.; Bradley, P. Machine and Deep Learning Algorithms, Computer Vision Technologies, and Internet of Things-based Healthcare Monitoring Systems in COVID-19 Prevention, Testing, Detection, and Treatment. Am. J. Med. Res. 2022, 9, 145–160. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topic | Identified | Selected |
|---|---|---|
| Internet of Robotic Things + big data management algorithms | 124 | 34 |
| Internet of Robotic Things + deep learning-based object detection technologies | 126 | 35 |
| Internet of Robotic Things + geospatial simulation and sensor fusion tools | 129 | 36 |
| Type of paper | ||
| Original research | 272 | 78 |
| Review | 46 | 27 |
| Conference proceedings | 48 | 0 |
| Book | 7 | 0 |
| Editorial | 6 | 0 |
| Cloud computing and wireless communication technologies integrate industrial machines, smart sensors, heterogeneous sensor devices, big data management algorithms, and autonomous robots. | [1,2,3,4] |
| Automated data transmission, sensor data, industrial manufacturing processes, and machine learning techniques configure networked autonomous plants and sensor technologies. | [5,6,7,8] |
| Real-time monitoring industrial sensing and swarm robotic systems, in addition to cloud computing, imaging, and sensing technologies articulate industrial manufacturing processes. | [9,10,11,12] |
| IoRT-based big data mining and analysis, cloud computing and big data technologies, and smart devices shape contextual awareness in uncontrolled environments. | [13,14,15,16] |
| Collaborative interoperable networked unmanned systems deploy intelligent virtual agents, computation technologies and algorithms, and sensor networks. | [17,18,19,20] |
| IoRT-based manipulation and 3D object recognition and tracking tasks can be carried out in unstructured environments by leveraging robotic systems, cloud computing technologies, big data analytics, and machine and deep learning algorithms in terms of robust perceptual capabilities and reliable visual data. | [21,22,23,24] |
| IoT-based robots and robotic systems necessitate environmental location and sound recognition tools, context awareness data, and artificial neural networks to assist in decision making processes. | [25,26,27,28] |
| Tracking mobile IoRT devices is instrumental in robotic operating and fog computing network systems. | [29,30,31,32] |
| IoRT-based operational technologies are pivotal in robot trajectory tracking in dynamic mobile environments and as regards functional interoperability, data integration complexity, and structural connectivity in industrial systems through big data management algorithms. | [33,34,35,36] |
| Spatial clustering of sensing capabilities, deep learning-based object detection technologies, noise algorithms, and networked scheduling mechanisms and communication objects enable robot control and decentralized tracking systems. | [37,38,39,40] |
| Actuation and control methods assist IoRT physical and virtual devices across monitoring and managing context-aware perception and modeling systems by use of multi-agent systems, cloud computing technologies, and failure checking techniques. | [41,42,43,44] |
| Remote robotic cooperation and streaming workflow optimize computer simulation and modeling of data sharing processes through networked cloud robotics, robot clusters, and heuristic algorithms. | [45,46,47,48] |
| Remotely monitoring pervasively embedded connected sensors, automation systems, and smart objects enhance accuracy and robustness of wireless sensor networks and ambient intelligence technologies. | [49,50,51,52] |
| Interoperable connected devices and cyber–physical systems shape autonomous robot coordination by use of visual sensors in terms of data sharing, storage, and analysis. | [53,54,55,56] |
| Fog, edge, and cloud technologies, big data analysis tools, and sensor devices further IoRT networks and assist in processing, sharing, networking, and storing data. | [57,58,59,60] |
| Decision-making and assessment support of data networks, tools, and modeling determine internal states of real-time data processes across IoRT networks. | [61,62,63,64] |
| IoRT sensor and module networking and operating embedded control systems advance scalable data computation and efficient processes across industrial environments. | [65,66,67,68] |
| IoRT networks seamlessly integrate autonomous smart devices, geospatial simulation and sensor fusion tools, intelligent techniques and machines, and deep and machine learning algorithms that are pivotal in industrial data processing and computation. | [69,70,71,72] |
| Fog and edge computing technologies assist the decentralized architecture of IoRT devices in terms of data scalability and interoperability. | [73,74,75,76] |
| Computing task optimization, data processing and replication mechanisms, and sound IoRT techniques and algorithms configure autonomous decentralized robotic systems and functionalities. | [77,78,79,80] |
| Sustainable production and business development can be attained in cyber–physical systems by use of IoRT devices, deep and machine learning-based decision making, and pervasive computing and cloud technologies, increasing data monitoring accuracy. | [81,82,83,84] |
| Routing efficiency and scalability of mobile robots can be achieved through autonomous robot coordination in dynamic decentralized environments and across wireless wearable sensor networks by integrating blockchain technologies, remote sensing environmental data, and sensor-based deep learning techniques. | [85,86,87,88] |
| IoRT devices accurately process and analyze collected data by deploying image recognition technology, geospatial simulation and sensor fusion tools, and intelligent optimization algorithms. | [89,90,91,92] |
| Robot-based assistance of IoT-enabled edge computing technologies requires blockchain-enabled edge computing systems, heterogeneous computational collective intelligence and processes, and distributed edge devices and algorithms. | [93,94,95,96] |
| IoRT-based machine learning techniques and data processing integrate multi-sensor data fusion and deep reinforcement learning algorithms, in addition to cloud, edge, and fog computing technologies. | [97,98,99,100] |
| IoRT devices and machine intelligence develop on swarm robot and machine learning-based perception algorithms to attain optimal routing path and network performance. | [101,102,103,104,105] |
| Cloud computing and wireless communication technologies integrate industrial machines, smart sensors, heterogeneous sensor devices, big data management algorithms, and autonomous robots. | [1,2,3,4] |
| Automated data transmission, sensor data, industrial manufacturing processes, and machine learning techniques configure networked autonomous plants and sensor technologies. | [5,6,7,8] |
| Real-time monitoring industrial sensing and swarm robotic systems, in addition to cloud computing, imaging, and sensing technologies articulate industrial manufacturing processes. | [9,10,11,12] |
| IoRT-based big data mining and analysis, cloud computing and big data technologies, and smart devices shape contextual awareness in uncontrolled environments. | [13,14,15,16] |
| Collaborative interoperable networked unmanned systems deploy intelligent virtual agents, computation technologies and algorithms, and sensor networks. | [17,18,19,20] |
| IoRT-based manipulation and 3D object recognition and tracking tasks can be carried out in unstructured environments by leveraging robotic systems, cloud computing technologies, big data analytics, and machine and deep learning algorithms in terms of robust perceptual capabilities and reliable visual data. | [21,22,23,24] |
| IoT-based robots and robotic systems necessitate environmental location and sound recognition tools, context awareness data, and artificial neural networks to assist in decision making processes. | [25,26,27,28] |
| Tracking mobile IoRT devices is instrumental in robotic operating and fog computing network systems. | [29,30,31,32] |
| IoRT-based operational technologies are pivotal in robot trajectory tracking in dynamic mobile environments and as regards functional interoperability, data integration complexity, and structural connectivity in industrial systems through big data management algorithms. | [33,34,35,36] |
| Spatial clustering of sensing capabilities, deep learning-based object detection technologies, noise algorithms, and networked scheduling mechanisms and communication objects enable robot control and decentralized tracking systems. | [37,38,39,40] |
| Actuation and control methods assist IoRT physical and virtual devices across monitoring and managing context-aware perception and modeling systems by use of multi-agent systems, cloud computing technologies, and failure checking techniques. | [41,42,43,44] |
| Remote robotic cooperation and streaming workflow optimize computer simulation and modeling of data sharing processes through networked cloud robotics, robot clusters, and heuristic algorithms. | [45,46,47,48] |
| Remotely monitoring pervasively embedded connected sensors, automation systems, and smart objects enhance accuracy and robustness of wireless sensor networks and ambient intelligence technologies. | [49,50,51,52] |
| Interoperable connected devices and cyber–physical systems shape autonomous robot coordination by use of visual sensors in terms of data sharing, storage, and analysis. | [53,54,55,56] |
| Fog, edge, and cloud technologies, big data analysis tools, and sensor devices further IoRT networks and assist in processing, sharing, networking, and storing data. | [57,58,59,60] |
| Decision-making and assessment support of data networks, tools, and modeling determine internal states of real-time data processes across IoRT networks. | [61,62,63,64] |
| IoRT sensor and module networking and operating embedded control systems advance scalable data computation and efficient processes across industrial environments. | [65,66,67,68] |
| IoRT networks seamlessly integrate autonomous smart devices, geospatial simulation and sensor fusion tools, intelligent techniques and machines, and deep and machine learning algorithms that are pivotal in industrial data processing and computation. | [69,70,71,72] |
| Fog and edge computing technologies assist the decentralized architecture of IoRT devices in terms of data scalability and interoperability. | [73,74,75,76] |
| Computing task optimization, data processing and replication mechanisms, and sound IoRT techniques and algorithms configure autonomous decentralized robotic systems and functionalities. | [77,78,79,80] |
| Sustainable production and business development can be attained in cyber–physical systems by use of IoRT devices, deep and machine learning-based decision making, and pervasive computing and cloud technologies, increasing data monitoring accuracy. | [81,82,83,84] |
| Routing efficiency and scalability of mobile robots can be achieved through autonomous robot coordination in dynamic decentralized environments and across wireless wearable sensor networks by integrating blockchain technologies, remote sensing environmental data, and sensor-based deep learning techniques. | [85,86,87,88] |
| IoRT devices accurately process and analyze collected data by deploying image recognition technology, geospatial simulation and sensor fusion tools, and intelligent optimization algorithms. | [89,90,91,92] |
| Robot-based assistance of IoT-enabled edge computing technologies requires blockchain-enabled edge computing systems, heterogeneous computational collective intelligence and processes, and distributed edge devices and algorithms. | [93,94,95,96] |
| IoRT-based machine learning techniques and data processing integrate multi-sensor data fusion and deep reinforcement learning algorithms, in addition to cloud, edge, and fog computing technologies. | [97,98,99,100] |
| IoRT devices and machine intelligence develop on swarm robot and machine learning-based perception algorithms to attain optimal routing path and network performance. | [101,102,103,104,105] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andronie, M.; Lăzăroiu, G.; Iatagan, M.; Hurloiu, I.; Ștefănescu, R.; Dijmărescu, A.; Dijmărescu, I. Big Data Management Algorithms, Deep Learning-Based Object Detection Technologies, and Geospatial Simulation and Sensor Fusion Tools in the Internet of Robotic Things. ISPRS Int. J. Geo-Inf. 2023, 12, 35. https://doi.org/10.3390/ijgi12020035
Andronie M, Lăzăroiu G, Iatagan M, Hurloiu I, Ștefănescu R, Dijmărescu A, Dijmărescu I. Big Data Management Algorithms, Deep Learning-Based Object Detection Technologies, and Geospatial Simulation and Sensor Fusion Tools in the Internet of Robotic Things. ISPRS International Journal of Geo-Information. 2023; 12(2):35. https://doi.org/10.3390/ijgi12020035
Chicago/Turabian StyleAndronie, Mihai, George Lăzăroiu, Mariana Iatagan, Iulian Hurloiu, Roxana Ștefănescu, Adrian Dijmărescu, and Irina Dijmărescu. 2023. "Big Data Management Algorithms, Deep Learning-Based Object Detection Technologies, and Geospatial Simulation and Sensor Fusion Tools in the Internet of Robotic Things" ISPRS International Journal of Geo-Information 12, no. 2: 35. https://doi.org/10.3390/ijgi12020035
APA StyleAndronie, M., Lăzăroiu, G., Iatagan, M., Hurloiu, I., Ștefănescu, R., Dijmărescu, A., & Dijmărescu, I. (2023). Big Data Management Algorithms, Deep Learning-Based Object Detection Technologies, and Geospatial Simulation and Sensor Fusion Tools in the Internet of Robotic Things. ISPRS International Journal of Geo-Information, 12(2), 35. https://doi.org/10.3390/ijgi12020035