
Human–Exoskeleton Interaction Force Estimation in Indego Exoskeleton



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
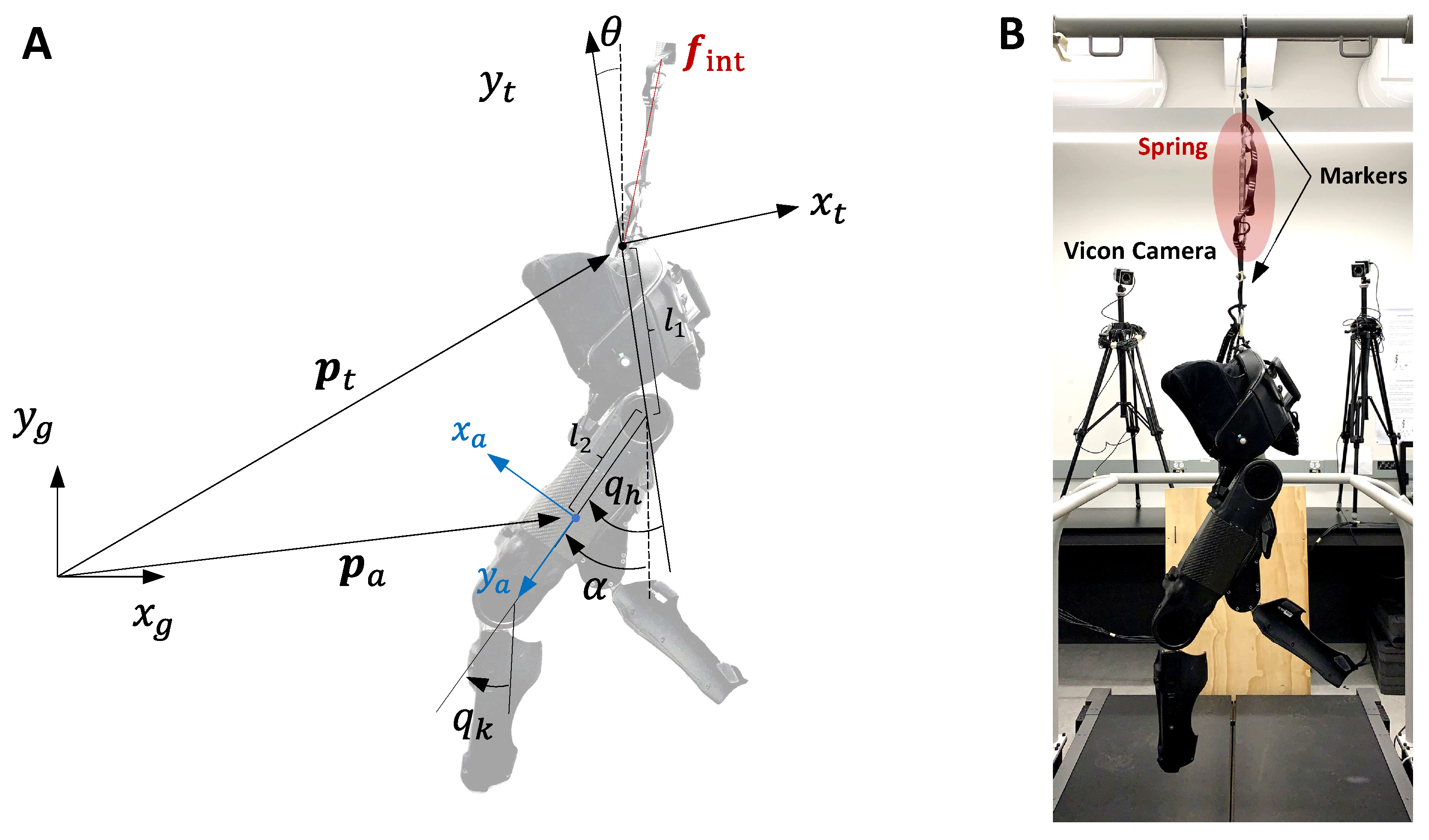
2.1. Interaction Torque Modeling
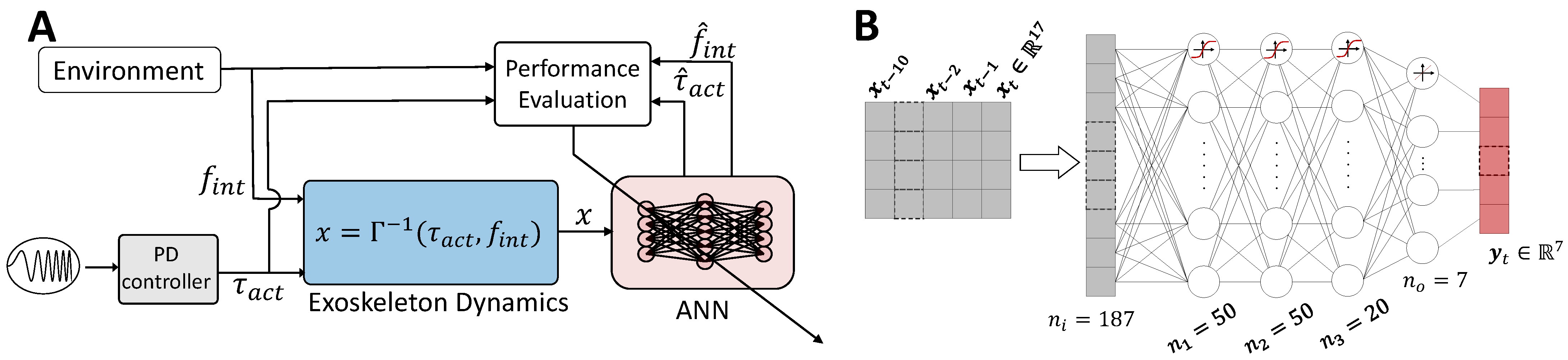
2.2. System Identification
2.3. Experimental Estimation of Human–Exoskeleton Interaction Torque
3. Results and Discussion
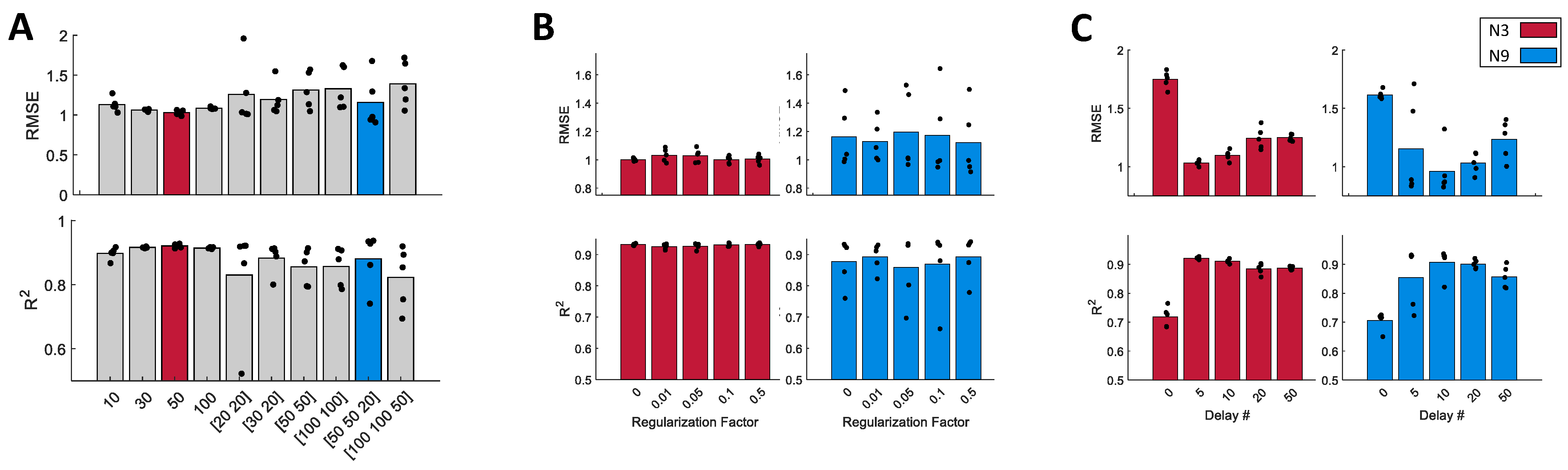
3.1. Tuning the Network Structure and Hyperparameters
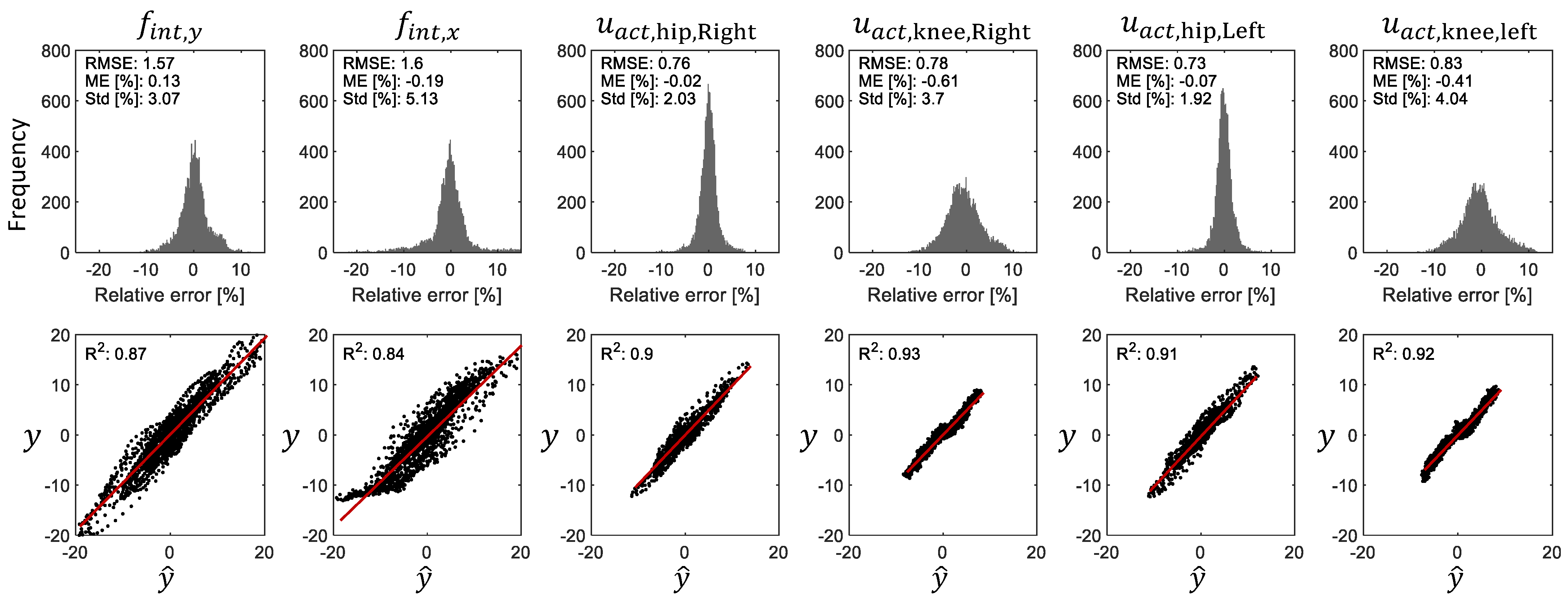
3.2. N9 Performance on Test Dataset
3.3. Human–Exoskeleton Interaction Torque Estimation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Duschau-Wicke, A.; Von Zitzewitz, J.; Caprez, A.; Lunenburger, L.; Riener, R. Path control: A method for patient-cooperative robot-aided gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 18, 38–48. [Google Scholar] [CrossRef] [PubMed]
- Huang, V.S.; Krakauer, J.W. Robotic neurorehabilitation: A computational motor learning perspective. J. Neuroeng. Rehabil. 2009, 6, 5. [Google Scholar] [CrossRef]
- Moreno, J.C.; Asin, G.; Pons, J.L.; Cuypers, H.; Vanderborght, B.; Lefeber, D.; Ceseracciu, E.; Reggiani, M.; Thorsteinsson, F.; Del-Ama, A.; et al. Symbiotic wearable robotic exoskeletons: The concept of the biomot project. In Proceedings of the International Workshop on Symbiotic Interaction, Helsinki, Finland, 30–31 October 2014; Springer: Berlin/Heidelberg, Germany, 2015; pp. 72–83. [Google Scholar]
- Murray, S.A.; Ha, K.H.; Hartigan, C.; Goldfarb, M. An assistive control approach for a lower-limb exoskeleton to facilitate recovery of walking following stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 23, 441–449. [Google Scholar] [CrossRef] [PubMed]
- Riener, R.; Lunenburger, L.; Jezernik, S.; Anderschitz, M.; Colombo, G.; Dietz, V. Patient-cooperative strategies for robot-aided treadmill training: First experimental results. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 380–394. [Google Scholar] [CrossRef]
- Banala, S.K.; Agrawal, S.K.; Scholz, J.P. Active Leg Exoskeleton (ALEX) for gait rehabilitation of motor-impaired patients. In Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 401–407. [Google Scholar]
- Zhang, J.f.; Dong, Y.m.; Yang, C.j.; Geng, Y.; Chen, Y.; Yang, Y. 5-Link model based gait trajectory adaption control strategies of the gait rehabilitation exoskeleton for post-stroke patients. Mechatronics 2010, 20, 368–376. [Google Scholar] [CrossRef]
- Li, Y.; Sena, A.; Wang, Z.; Xing, X.; Babic, J.; van Asseldonk, E.H.; Burdet, E. A review on interaction control for contact robots through intent detection. Prog. Biomed. Eng. 2022, 4, 032004. [Google Scholar] [CrossRef]
- Li, Y.; Ganesh, G.; Jarrassé, N.; Haddadin, S.; Albu-Schaeffer, A.; Burdet, E. Force, impedance, and trajectory learning for contact tooling and haptic identification. IEEE Trans. Robot. 2018, 34, 1170–1182. [Google Scholar] [CrossRef]
- Losey, D.P.; McDonald, C.G.; Battaglia, E.; O’Malley, M.K. A review of intent detection, arbitration, and communication aspects of shared control for physical human–robot interaction. Appl. Mech. Rev. 2018, 70, 010804. [Google Scholar] [CrossRef]
- De Rossi, S.M.M.; Vitiello, N.; Lenzi, T.; Ronsse, R.; Koopman, B.; Persichetti, A.; Vecchi, F.; Ijspeert, A.J.; Van der Kooij, H.; Carrozza, M.C. Sensing pressure distribution on a lower-limb exoskeleton physical human-machine interface. Sensors 2010, 11, 207–227. [Google Scholar] [CrossRef]
- Shojaei Barjuei, E.; Caldwell, D.G.; Ortiz, J. Bond graph modeling and kalman filter observer design for an industrial back-support exoskeleton. Designs 2020, 4, 53. [Google Scholar] [CrossRef]
- Jezernik, S.; Colombo, G.; Morari, M. Automatic gait-pattern adaptation algorithms for rehabilitation with a 4-DOF robotic orthosis. IEEE Trans. Robot. Autom. 2004, 20, 574–582. [Google Scholar] [CrossRef]
- Katsura, S.; Matsumoto, Y.; Ohnishi, K. Modeling of force sensing and validation of disturbance observer for force control. IEEE Trans. Ind. Electron. 2007, 54, 530–538. [Google Scholar] [CrossRef]
- Liang, C.; Hsiao, T. Admittance control of powered exoskeletons based on joint torque estimation. IEEE Access 2020, 8, 94404–94414. [Google Scholar] [CrossRef]
- Sharifi, M.; Mehr, J.K.; Mushahwar, V.K.; Tavakoli, M. Autonomous Locomotion Trajectory Shaping and Nonlinear Control for Lower Limb Exoskeletons. IEEE/ASME Trans. Mechatron. 2022, 27, 645–655. [Google Scholar] [CrossRef]
- Ghan, J.; Kazerooni, H. System identification for the Berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 3477–3484. [Google Scholar]
- Chen, L.; Wang, C.; Song, X.; Wang, J.; Zhang, T.; Li, X. Dynamic trajectory adjustment of lower limb exoskeleton in swing phase based on impedance control strategy. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 234, 1120–1132. [Google Scholar] [CrossRef]
- Yan, Y.; Chen, Z.; Huang, C.; Chen, L.; Guo, Q. Human-exoskeleton coupling dynamics in the swing of lower limb. Appl. Math. Model. 2022, 104, 439–454. [Google Scholar] [CrossRef]
- Zha, F.; Sheng, W.; Guo, W.; Qiu, S.; Deng, J.; Wang, X. Dynamic parameter identification of a lower extremity exoskeleton using RLS-PSO. Appl. Sci. 2019, 9, 324. [Google Scholar] [CrossRef]
- Vaney, C.; Gattlen, B.; Lugon-Moulin, V.; Meichtry, A.; Hausammann, R.; Foinant, D.; Anchisi-Bellwald, A.M.; Palaci, C.; Hilfiker, R. Robotic-assisted step training (lokomat) not superior to equal intensity of over-ground rehabilitation in patients with multiple sclerosis. Neurorehabilit. Neural Repair 2012, 26, 212–221. [Google Scholar] [CrossRef] [PubMed]
- Farris, R.J.; Quintero, H.A.; Murray, S.A.; Ha, K.H.; Hartigan, C.; Goldfarb, M. A preliminary assessment of legged mobility provided by a lower limb exoskeleton for persons with paraplegia. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 22, 482–490. [Google Scholar] [CrossRef] [PubMed]
- Sharifi, M.; Mehr, J.K.; Mushahwar, V.K.; Tavakoli, M. Adaptive cpg-based gait planning with learning-based torque estimation and control for exoskeletons. IEEE Robot. Autom. Lett. 2021, 6, 8261–8268. [Google Scholar] [CrossRef]
- Spong, M.W. Modeling and control of elastic joint robots. J. Dyn. Sys. Meas. Control 1987, 109, 310–318. [Google Scholar] [CrossRef]
- McCrum, C.; Lucieer, F.; van de Berg, R.; Willems, P.; Pérez Fornos, A.; Guinand, N.; Karamanidis, K.; Kingma, H.; Meijer, K. The walking speed-dependency of gait variability in bilateral vestibulopathy and its association with clinical tests of vestibular function. Sci. Rep. 2019, 9, 18392. [Google Scholar] [CrossRef] [PubMed]
- Waibel, A.; Hanazawa, T.; Hinton, G.; Shikano, K.; Lang, K.J. Phoneme recognition using time-delay neural networks. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 328–339. [Google Scholar] [CrossRef]
- Møller, M.F. A scaled conjugate gradient algorithm for fast supervised learning. Neural Netw. 1993, 6, 525–533. [Google Scholar] [CrossRef]
- Shushtari, M.; Dinovitzer, H.; Weng, J.; Arami, A. Ultra-Robust Real-Time Estimation of Gait Phase. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 2793–2801. [Google Scholar] [CrossRef]
- Winter, D.A. Human balance and posture control during standing and walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Dinovitzer, H.; Shushtari, M.; Arami, A. Accurate Real-Time Joint Torque Estimation for Dynamic Prediction of Human Locomotion. IEEE Trans. Biomed. Eng. 2023. [Google Scholar] [CrossRef]
- Shushtari, M.; Nasiri, R.; Arami, A. Online reference trajectory adaptation: A personalized control strategy for lower limb exoskeletons. IEEE Robot. Autom. Lett. 2021, 7, 128–134. [Google Scholar] [CrossRef]
- Nasiri, R.; Shushtari, M.; Arami, A. An adaptive assistance controller to optimize the exoskeleton contribution in rehabilitation. Robotics 2021, 10, 95. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shushtari, M.; Arami, A. Human–Exoskeleton Interaction Force Estimation in Indego Exoskeleton. Robotics 2023, 12, 66. https://doi.org/10.3390/robotics12030066
Shushtari M, Arami A. Human–Exoskeleton Interaction Force Estimation in Indego Exoskeleton. Robotics. 2023; 12(3):66. https://doi.org/10.3390/robotics12030066
Chicago/Turabian StyleShushtari, Mohammad, and Arash Arami. 2023. "Human–Exoskeleton Interaction Force Estimation in Indego Exoskeleton" Robotics 12, no. 3: 66. https://doi.org/10.3390/robotics12030066
APA StyleShushtari, M., & Arami, A. (2023). Human–Exoskeleton Interaction Force Estimation in Indego Exoskeleton. Robotics, 12(3), 66. https://doi.org/10.3390/robotics12030066