1. Introduction
This work is motivated by the necessity to explore the potentialities and limits of locomotion controllers typically used in the best-performing quadrupeds currently available and engaged to explore unstructured terrain. For these purposes, legged robots outperform wheeled machines, offering minimal evasiveness and superior climbing capabilities. This comes at an additional cost in terms of manoeuvrability (steering) and attitude control, in particular in the presence of slippery surfaces [
1,
2,
3]. Gait parameters such as the step length and walking speed need to be carefully chosen. In the proposed work, a quadrupedal structure modelling the MIT Mini Cheetah robot was considered; the huge recent advances in its control architecture and its low cost make this structure an ideal candidate for the exploration of outdoor environments [
4]. In the literature, the traditional ways to cope with the problem of slip detection and compensation are force-based and kinematic-based. The former [
5,
6] requires legs endowed with expensive and accurate force sensors, which can be damaged due to the repetitive impulse-like bumps in the touchdown phase. The latter [
7] estimates slip and friction parameters through relative motion detection of the stance feet in the velocity space. In general, the stability of legged robots is dramatically compromised when walking on slippery surfaces due to the inertial effects caused by the sudden acceleration of the center of mass during leg touchdown events.
Legged machines have additional complexity due to the increased number of degrees of freedom to be controlled for locomotion efficiency trajectory tracking. With this aim, two main parallel controllers are implemented: one devoted to (high-level) trajectory following and the other related to the maintenance of a specified locomotion gait, i.e., a prescribed phase relation among the legs. One of the most used approaches for high-level control in legged machines relies on model predictive control (MPC), whereas the mostly used low-level locomotion control relies on the central pattern generator (CPG) approach. MPC is a well-known control strategy that has been studied deeply in recent decades both in advanced research and in more industry-related applications [
8], with interesting applications for online motion control of running bipeds on uneven terrain [
9] or for gait adaptation in quadrupeds [
10]. In particular, linear model predictive controllers (LMPCs) assume that the system dynamics can be efficiently approximated as linear. For certain applications involving highly nonlinear system control, nonlinear model predictive control (NMPC) is required [
10,
11,
12], which comes at the expense of higher complexity in terms of design and implementation of the control law and stability analysis of the obtained closed-loop system.
Within the NMPC family, a neural network model predictive controller (NNMPC) is adopted when the modelling procedure is data-driven, and the system nonlinearities are assumed to be unknown [
13,
14]. Using this strategy, it is possible to build a black-box model of the system wherein the nonlinear characteristics can be learned from simulation and/or experimental data. Contrary to the standard approach, for which there is a need to estimate the friction coefficient, to cope with slippery surfaces, in this work, a neural model is shown to autonomously capture the nonlinear interactions between the ground reaction force under slippery conditions and the center of mass motion. This model can be used within the MPC controller to achieve efficient control of the robot motion.
Recently, high-level steering control was successfully addressed using an LMPC approach, assuming that the particular robot configuration would heavily simplify the robot dynamics (i.e., the concentration of all twelve actuators on the robot main body and the light leg inertia) [
15].
However, this condition holds in the case of locomotion in terrain far from slippery conditions. Here, we show the limits of LMPC. Due to the complex inertia interplay, while moving on slippery surfaces, an accurate nonlinear analytical model of the real robot is particularly difficult to formalize, and black-box modelling strategies such as neural networks can be efficiently applied. On the other side, direct deployment of such control strategies in legged robots, especially when requested to move on slippery terrain, is very dangerous. As a consequence, the use of accurate dynamic simulation environments is essential for proper evaluation of robot performance and application limits.
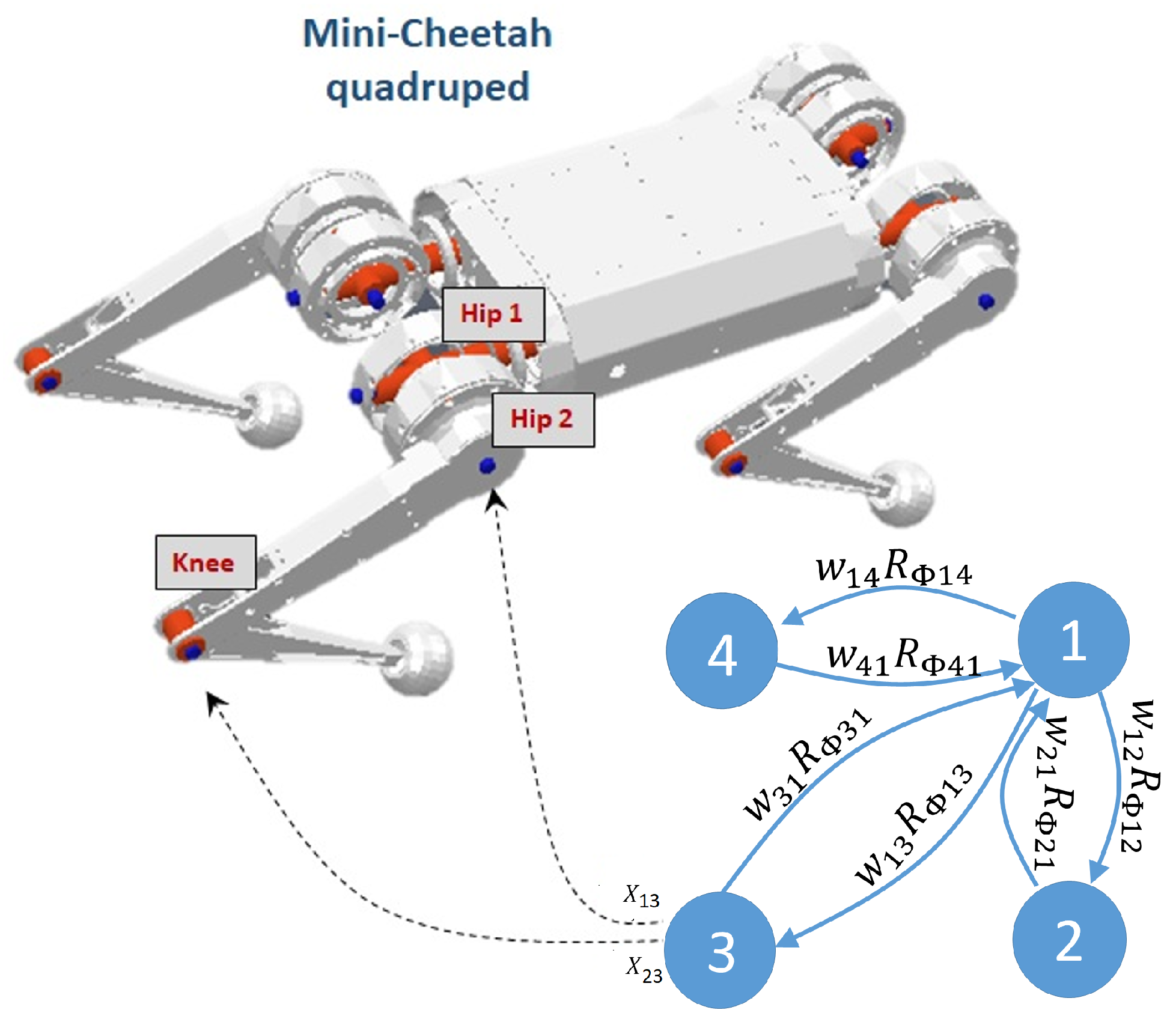
The low-level CPG locomotion controller adopted in this work to generate a set of reference phase relationships among the actuators of the robot legs is based on the reaction-diffusion cellular neural network (RD-CNN) [
16] paradigm, which can show steady-state stable, phase-shifted dynamics to generate the desired locomotion gait [
17,
18]. Further solutions based on embodied motor neurons have also been investigated [
19]. Steering control is simply realised by applying suitable gains to the neuron links of the RD-CNN.
In previous work, the effect of linear and nonlinear MPC on quadrupedal steering was presented by the authors [
20]. The adopted quadruped robot was controlled through a different and more complex CPG architecture based on the Matsuoka neuron model [
21], the oscillations of which were synchronized using sensory feedback acquired using load sensors. MPC was adopted to provide a feedback signal to properly train the robot steering to follow a given path. In that study, the terrain was considered flat, and slippery conditions were not taken into account, which are the main focus of the proposed work.
Starting from the motivations mentioned above, the novelties of the proposed approach are summarized as follows:
MPC is used to choose the steering command in order to maximise control performance. A careful comparison between LMPC and NNMPC is performed, demonstrating the limits of the former in the specific case of slippery terrain conditions. Here, the need to adopt a nonlinear MPC emerges in order to compensate for the complex dynamical effects involved in locomotion;
The approach is data-driven and, as such, does not require an analytical model, which, in cases of complex multibody structures, is difficult to accurately derive. Moreover, the approach can be extended to other robot structures and scenarios with the same efficiency;
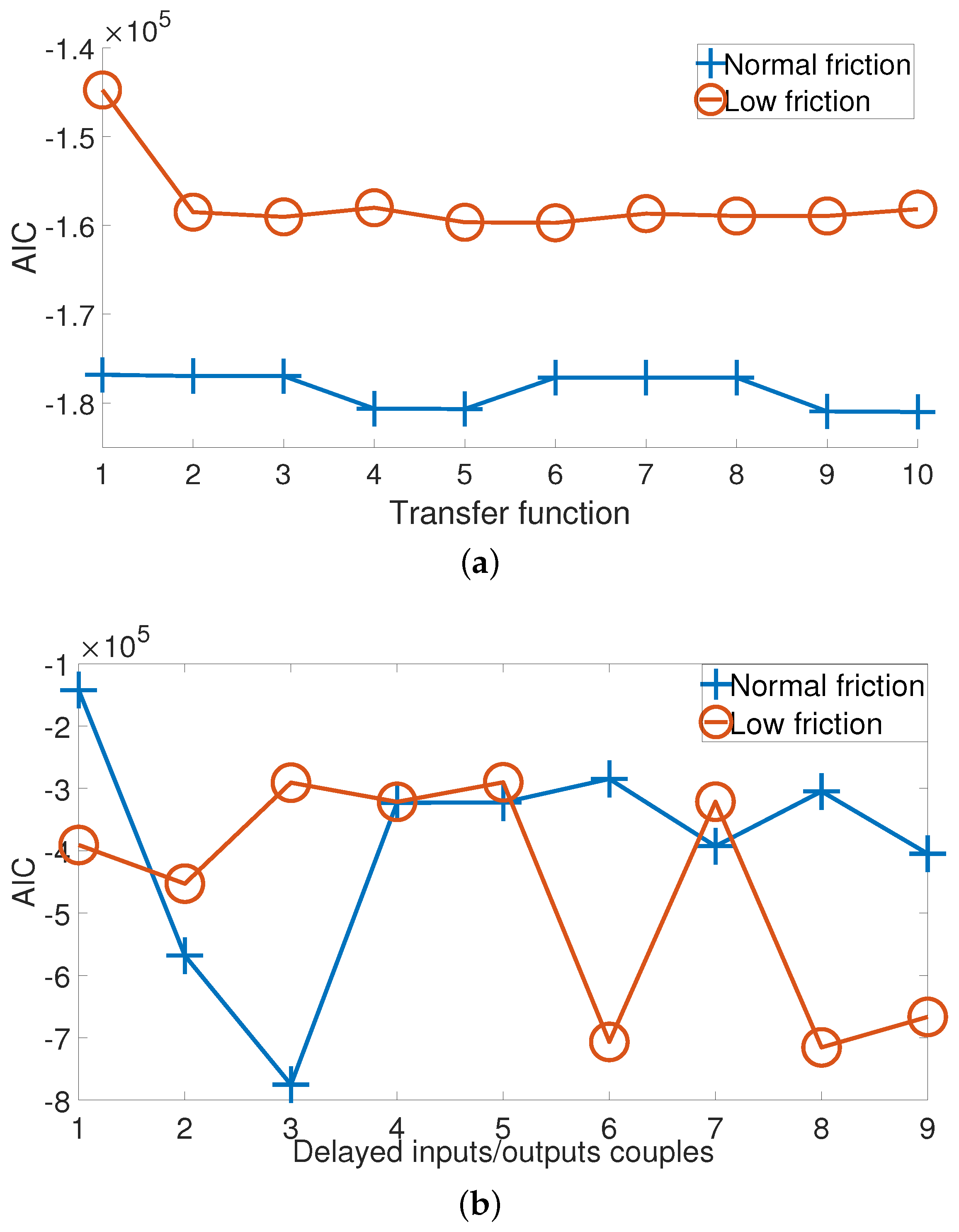
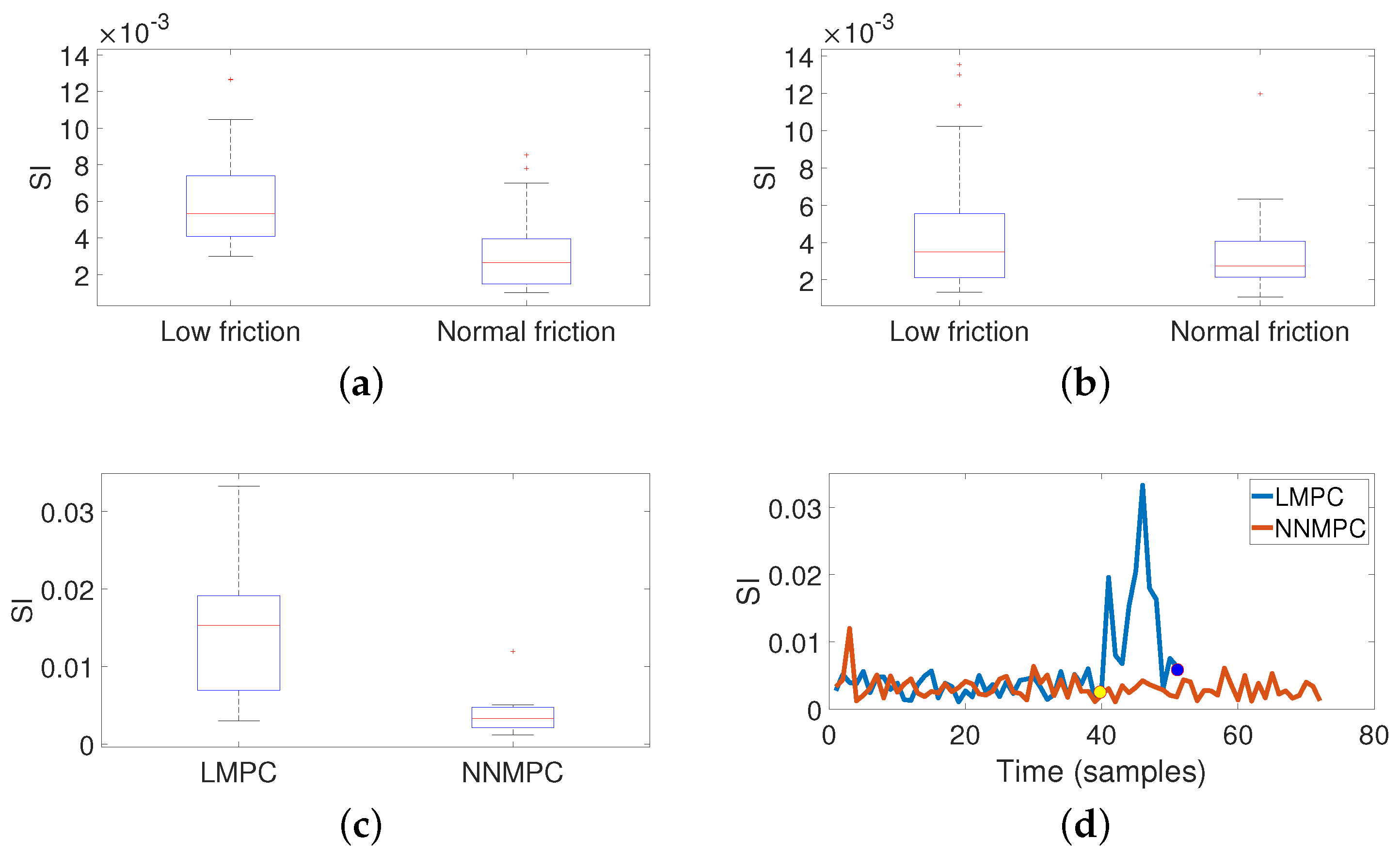
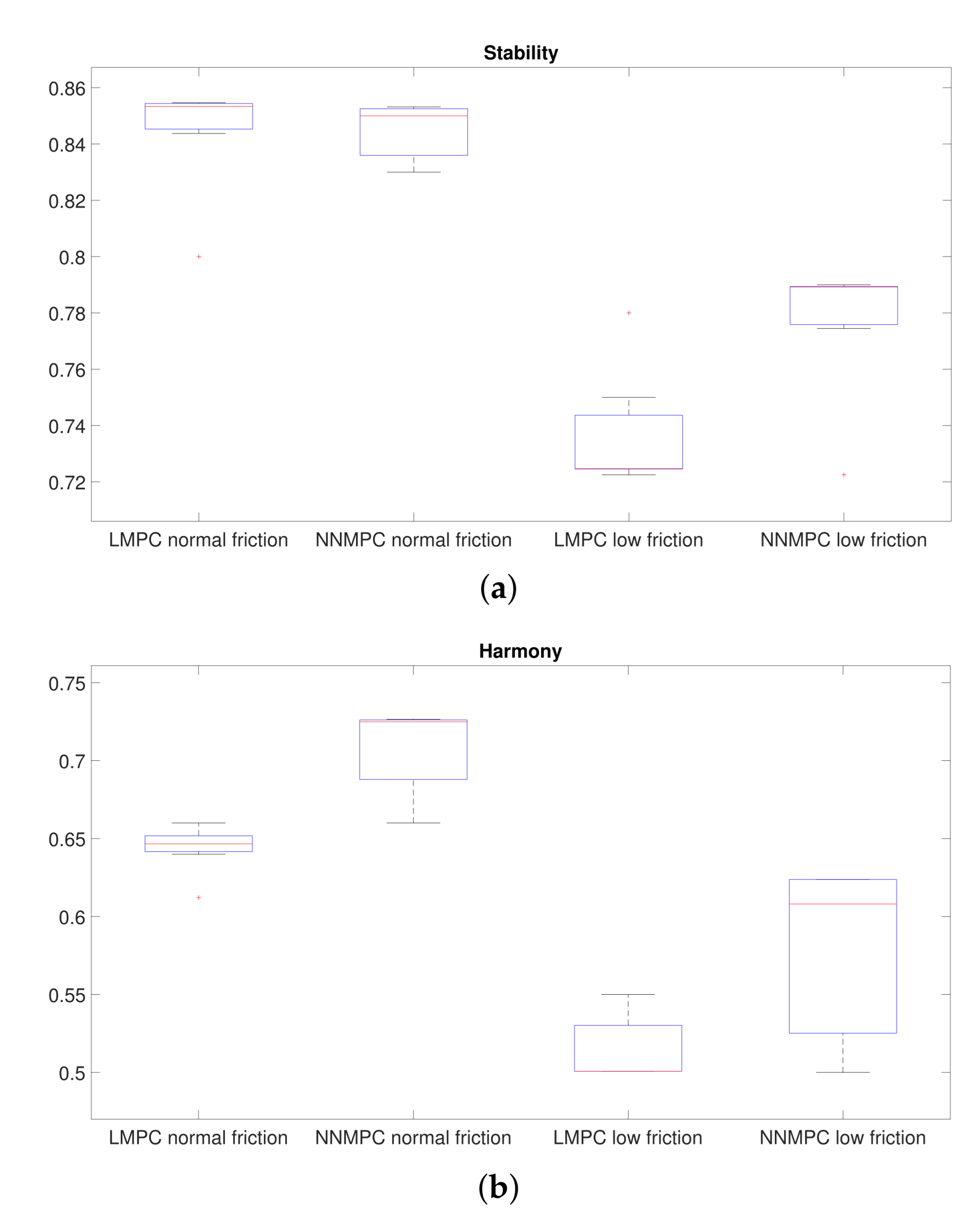
Specific performance indicators are adopted during the different evaluation steps, including robot model selection (i.e., Akaike information criterion), steering controller evaluation (i.e., goodness of fit and slipping index), and evaluation of locomotion efficiency (i.e., stability and harmony [
22,
23]).
This paper is structured as follows.
Section 2 shows the materials and methods considered, including the robotic neural locomotion architecture, the theoretical results on the stability of the steering locomotion gait, the MPC strategy, and the adopted performance indices. In
Section 3 comparisons of LMPC and NNMPC implementations for different slippery scenarios are presented. Finally, conclusions are drawn in
Section 4.
4. Conclusions
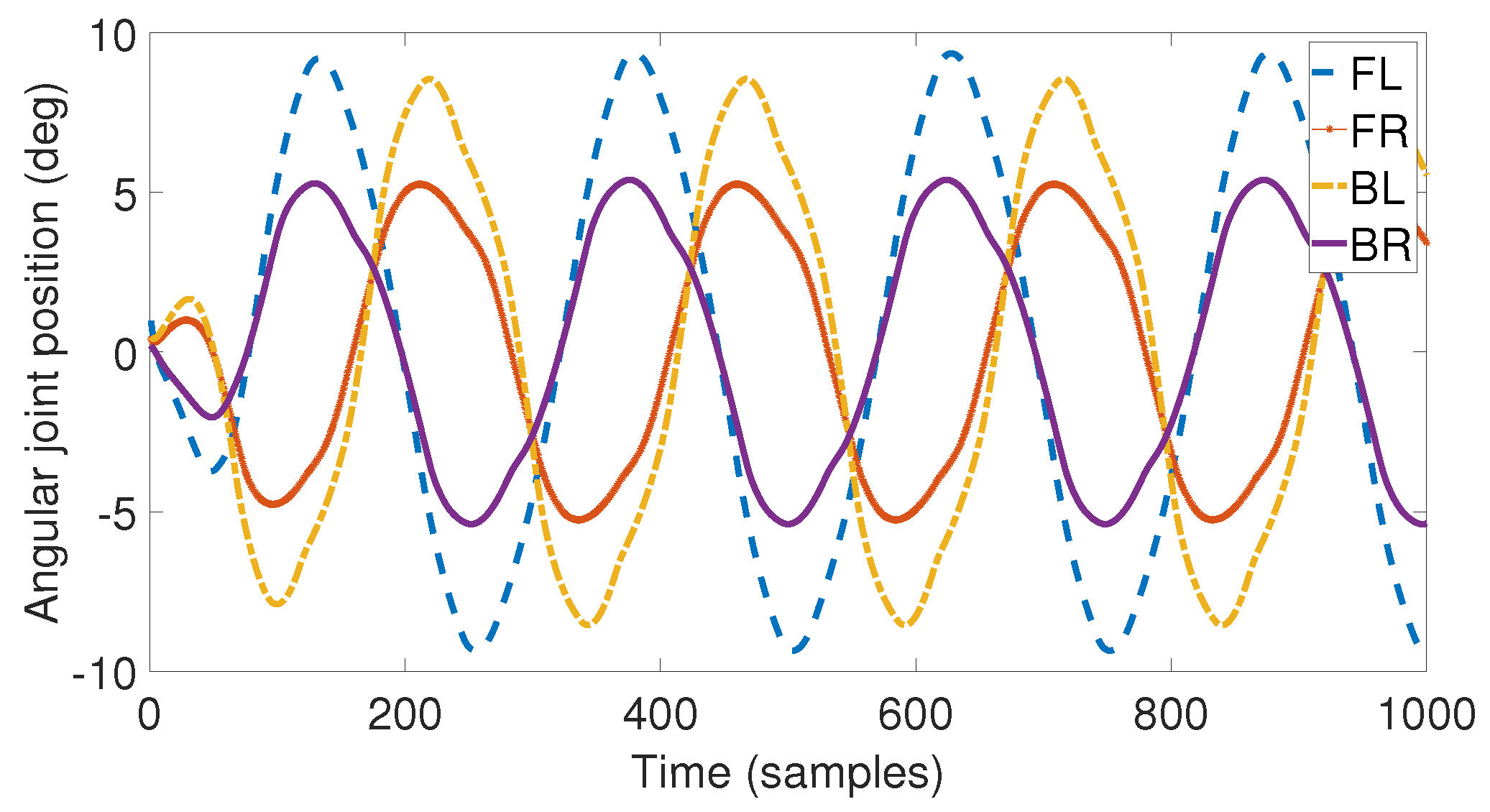
In this paper, locomotion control in a simulated Mini-Cheetah quadruped robot moving in a slippery terrain was deeply analysed. The overall locomotion strategy was considered a hierarchical control task. The low-level phase-shifted synchronization among the robot legs, for general manoeuvres including steering, was entrusted to a CPG.
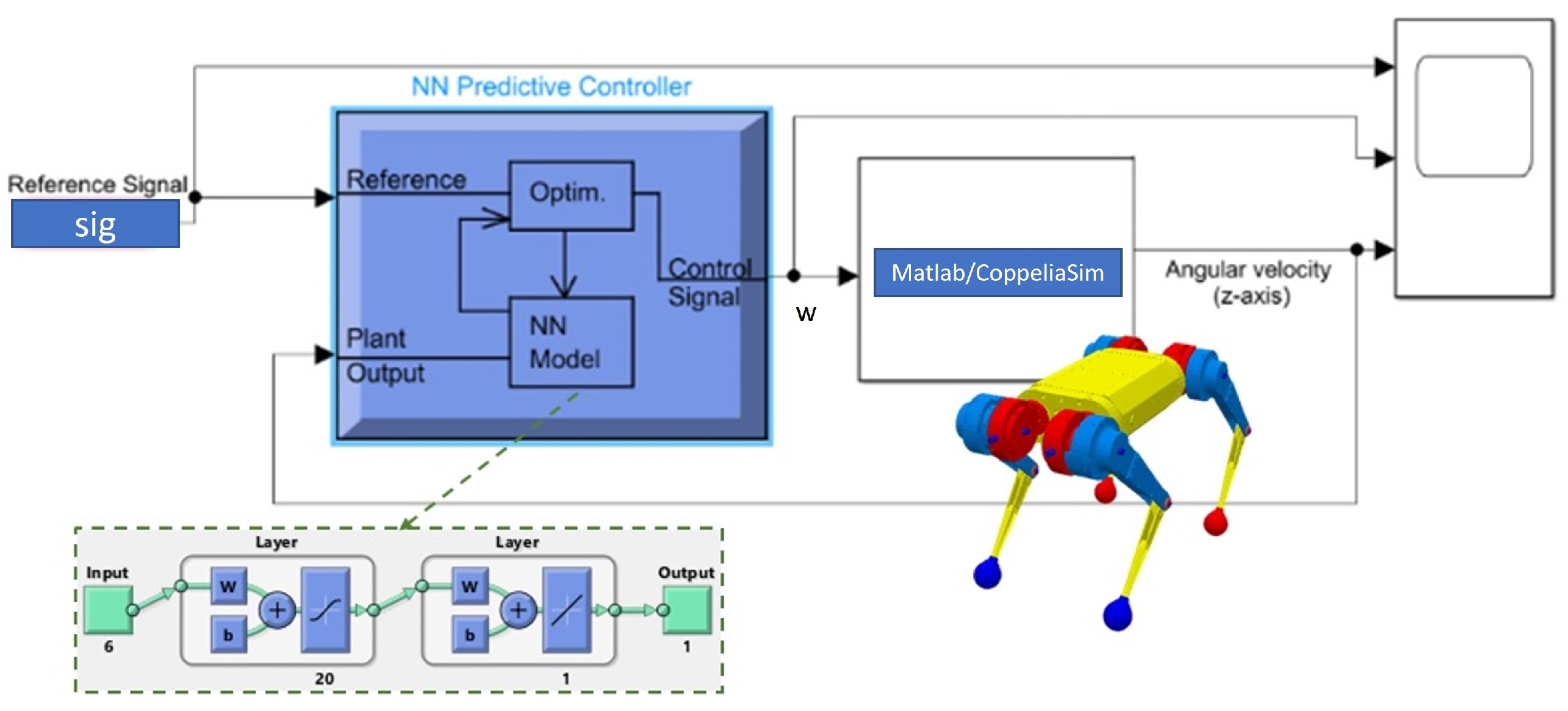
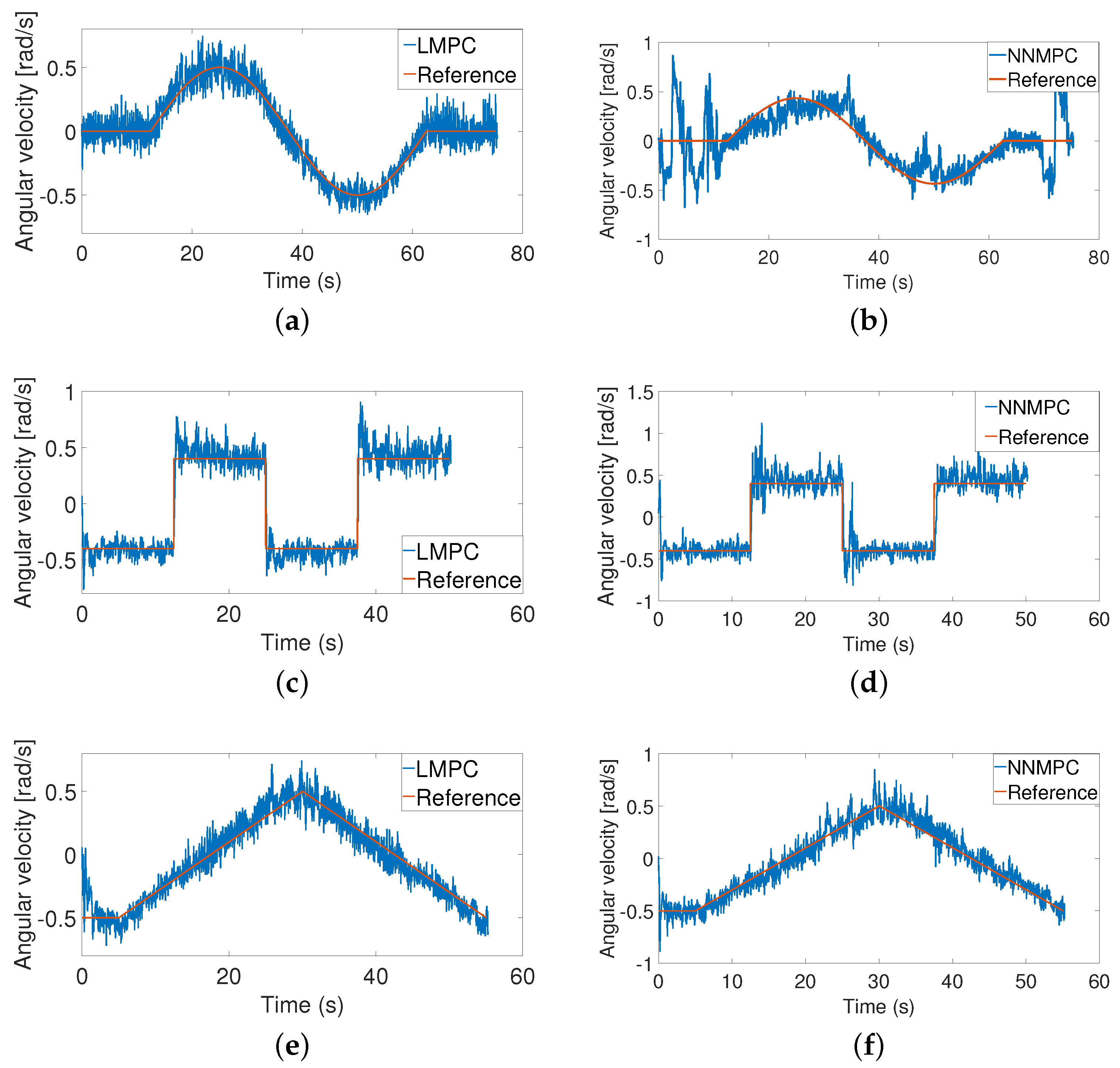
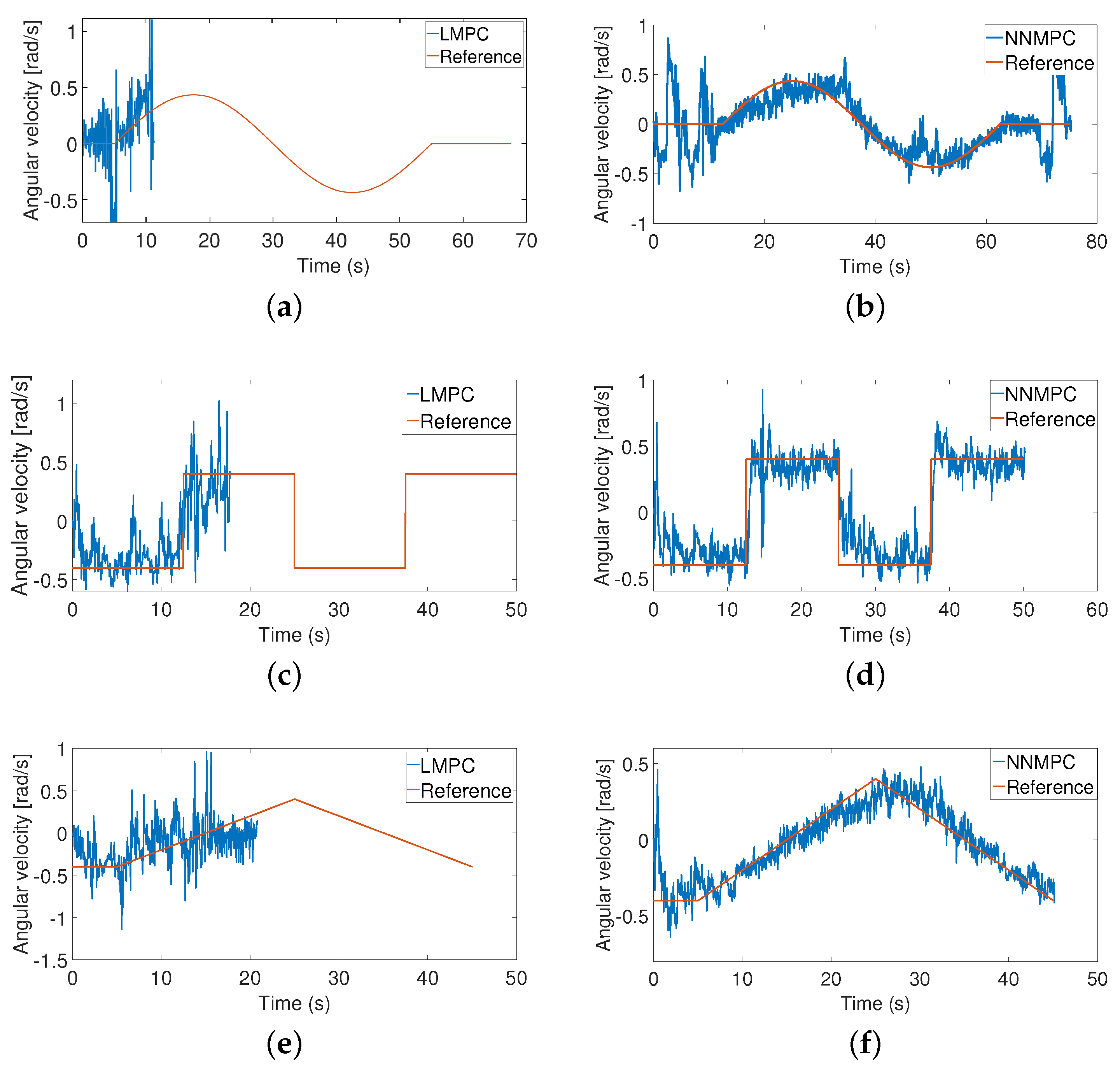
For high-level trajectory control, linear and nonlinear (neural network-based) MPCs were compared. MPC guides robot steering based on a reference consisting of the angular velocity (yaw speed) and acting on specific gains modulating the neural signals applied as position control references to the robot joints.
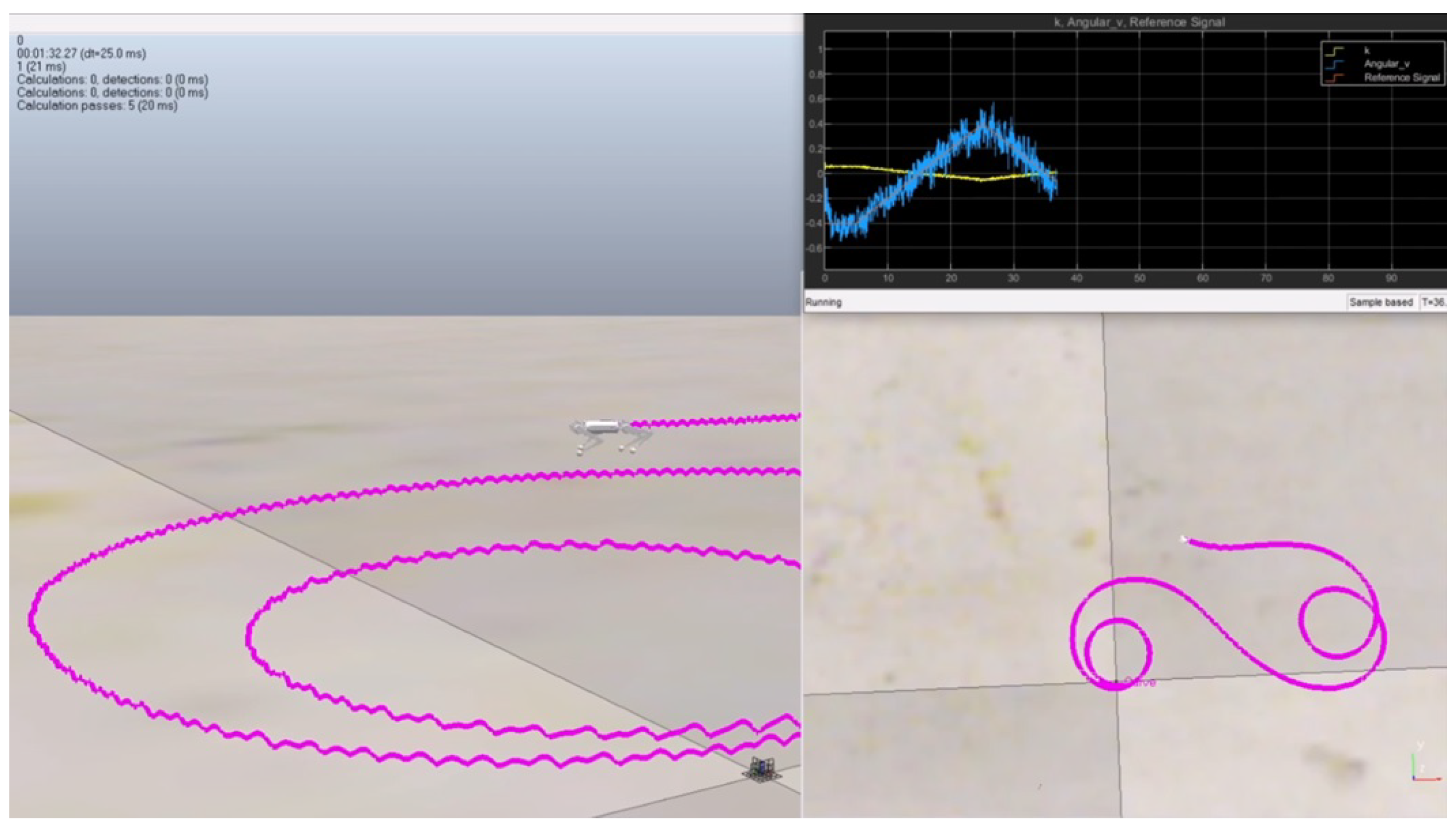
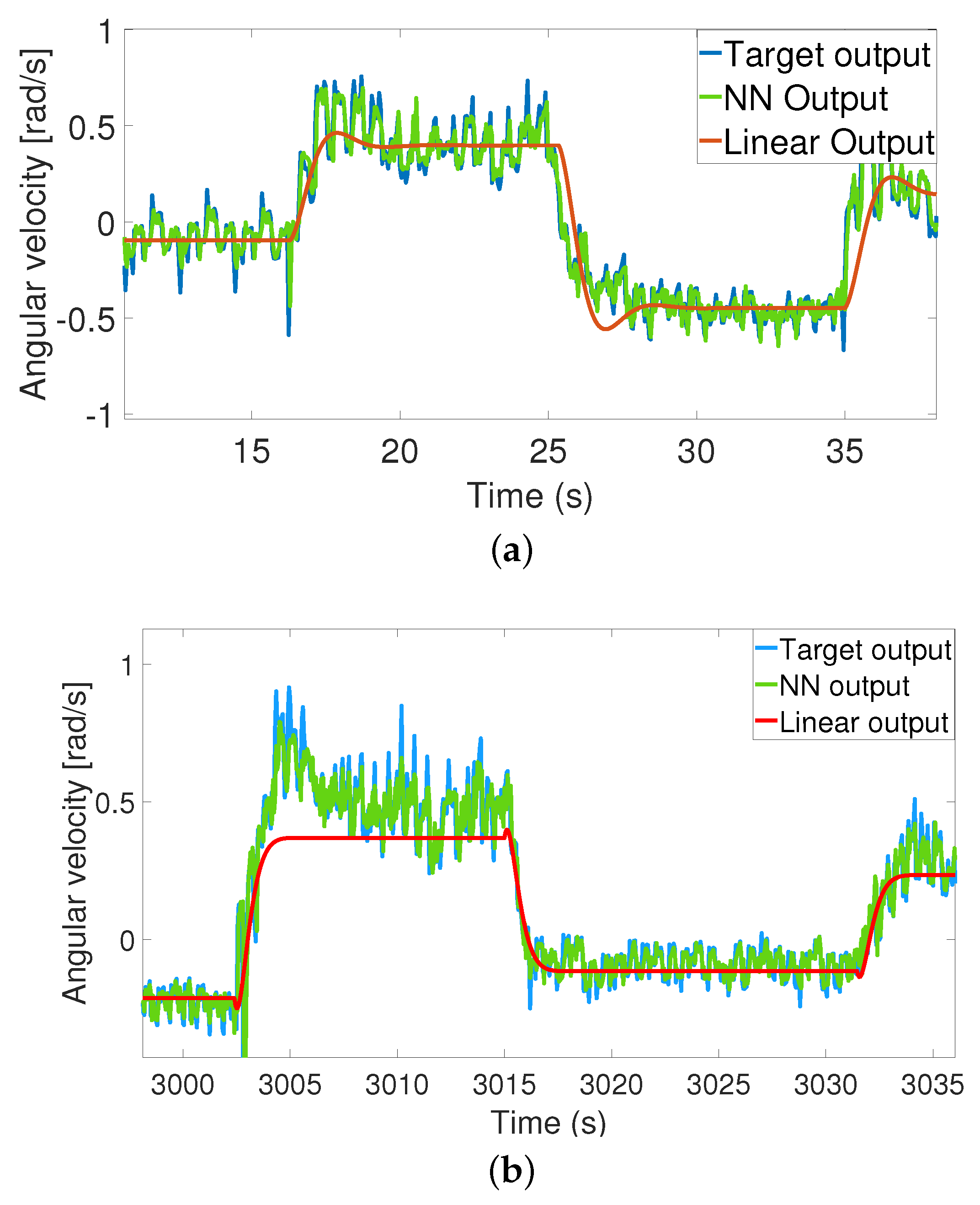
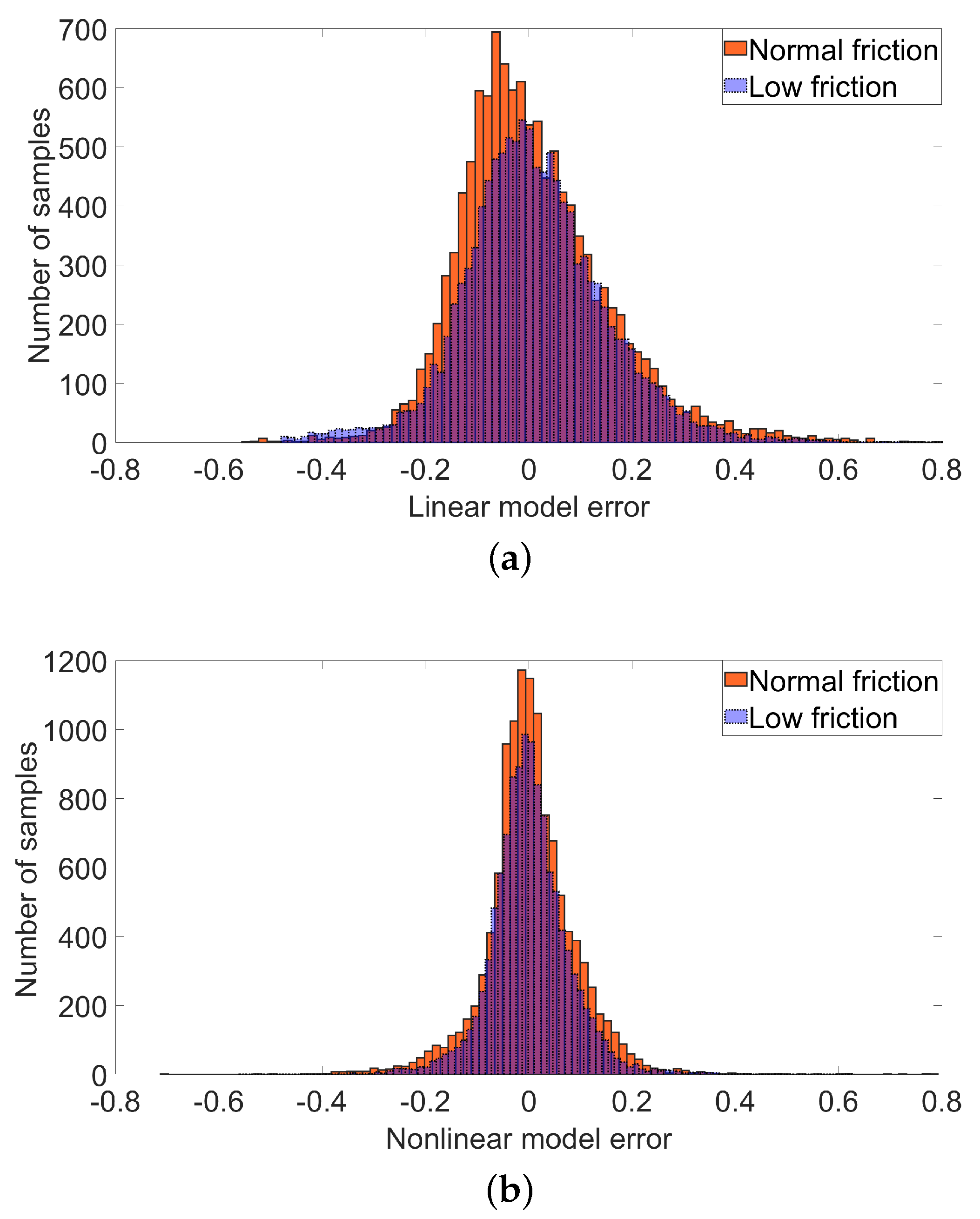
To properly compare the results, a neural network and a linear transfer function model were developed and optimized, using a data-driven approach to model the quadruped robot behaviour. The adopted dataset was generated using a model of the Mini Cheetah robot simulated in a dynamic environment, both under typical working conditions and in the presence of slippery terrain. The results obtained with NNMPC were compared with the linear MPC-based approach. The selection of the optimal model was achieved in both cases through the index, taking into account both the accuracy and the complexity of the model. A comparative analysis was carried out taking into account the and the indices. The difference between the two control systems is evident in the case of relevant slippery conditions: the LMPC was no longer able to complete the requested steering trajectories, causing a robot fall. The main reason for this result is that the impulsive forces generated on the robot body during the leg touchdown and stance phase can be filtered out only in the case of a normal friction condition. In this case, a linear model can sufficiently approximate the robot dynamic response to the steering commands. In the case of slippery surfaces, the advantage of an NNMPC is evident. The quality of the control architecture was also demonstrated using typical indices adopted for legged locomotion, such as stability and harmony. These quantified improvements obtained with NNMPC control in the low-friction case. The dynamic simulation analysis of the quadruped robot represents a required step for future implementations on the hardware prototype. Particular attention has been devoted to reducing the computational complexity in view of an onboard implementation for both the developed CPG and the MPC through the selection of optimal linear and nonlinear robot models. The adopted approach, which is essentially data-driven, can be extended to different scenarios, including uneven terrain and robot architectures, as discussed in the manuscript. Further research activities will be devoted to the integration of additional leg segments inspired by an insect tarsus, which improves the adhesion capabilities through different mechanical solutions, including the presence of claws.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}