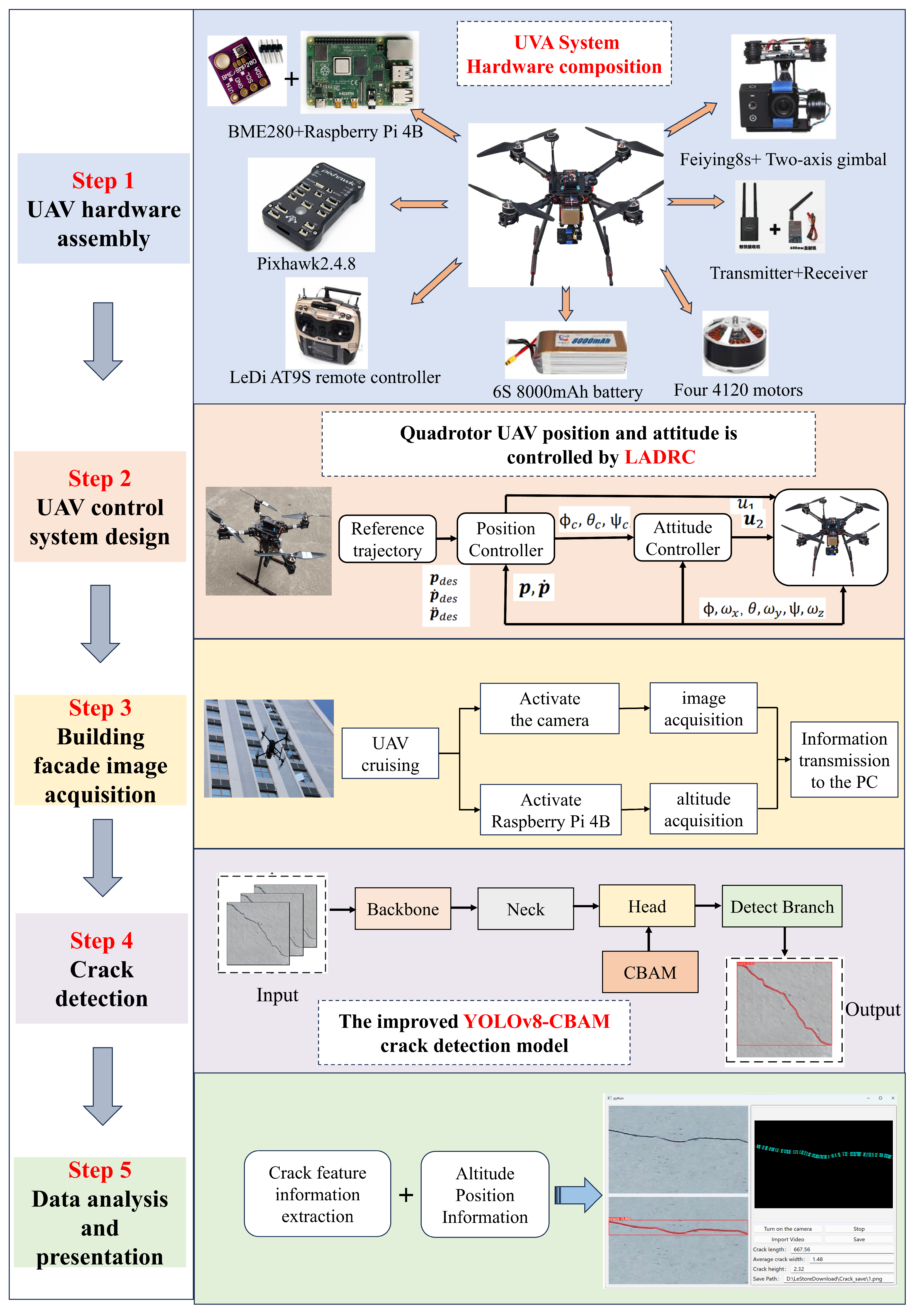
Figure 1.
Overall system configuration. It includes five parts: hardware composition, UAV control system design, exterior wall crack image acquisition, crack detection, data analysis, and interface display, as shown on the right.
Figure 1.
Overall system configuration. It includes five parts: hardware composition, UAV control system design, exterior wall crack image acquisition, crack detection, data analysis, and interface display, as shown on the right.
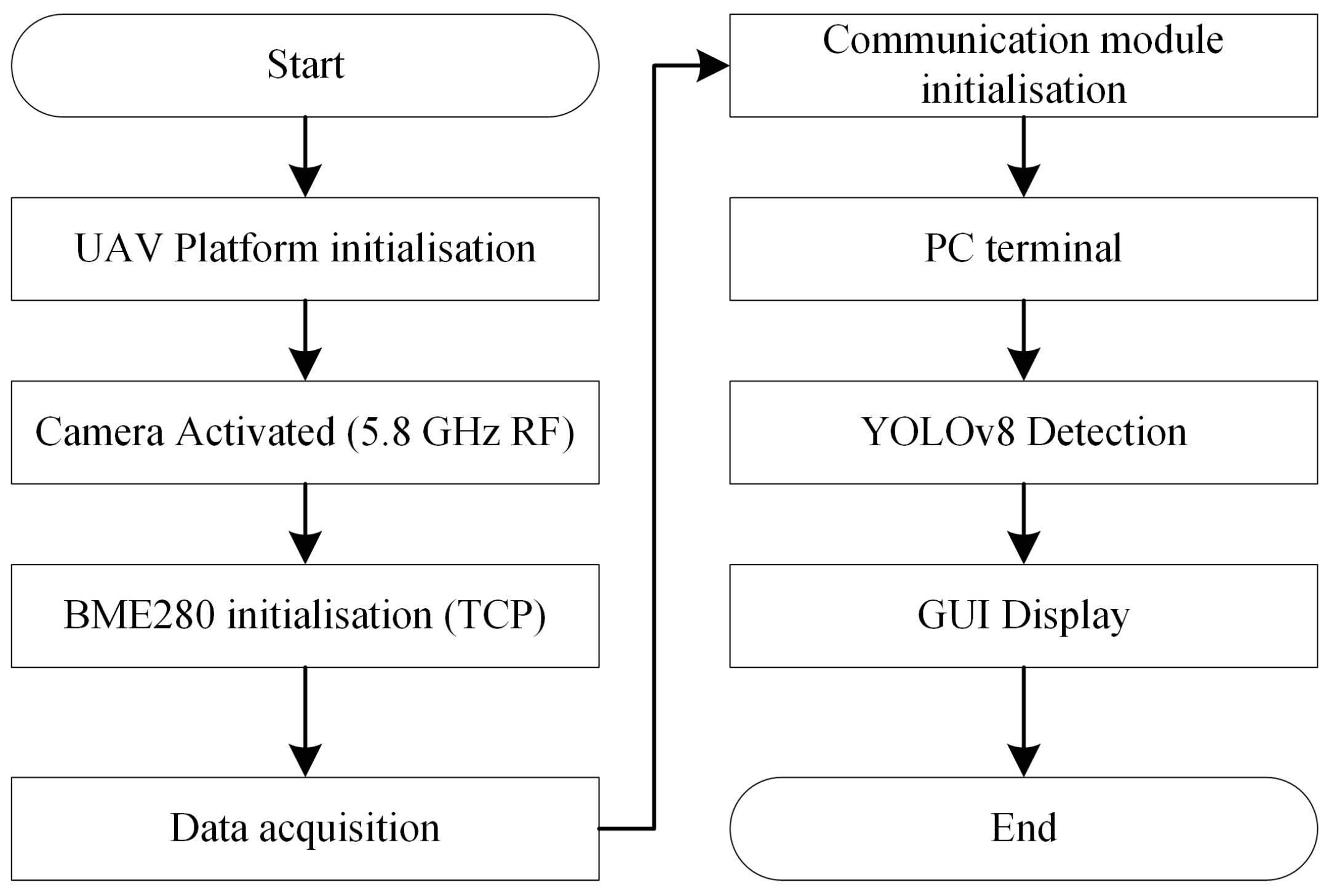
Figure 2.
The overall software interaction process.
Figure 2.
The overall software interaction process.
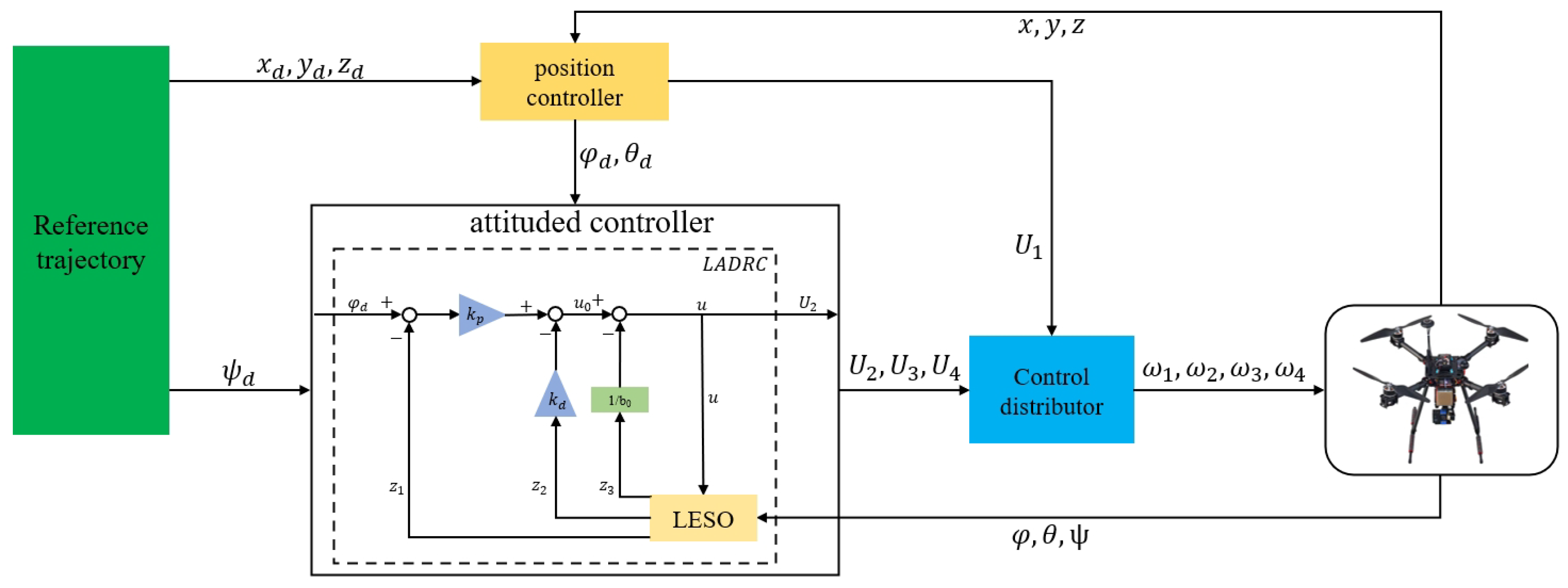
Figure 3.
Trajectory tracking control structure of UAV based on LADRC.
Figure 3.
Trajectory tracking control structure of UAV based on LADRC.
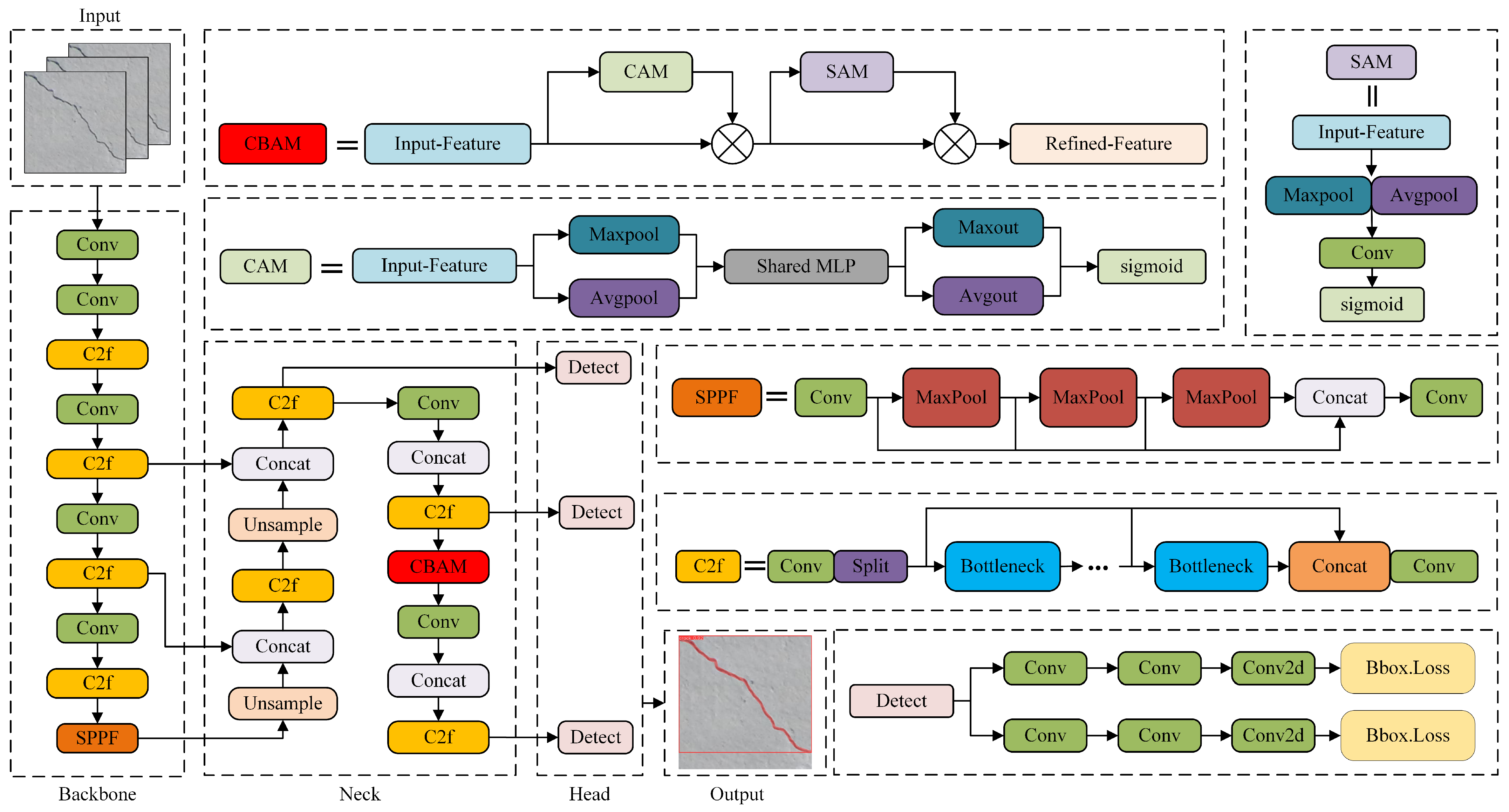
Figure 4.
The proposed YOLOv8-CBAM model structure diagram.
Figure 4.
The proposed YOLOv8-CBAM model structure diagram.
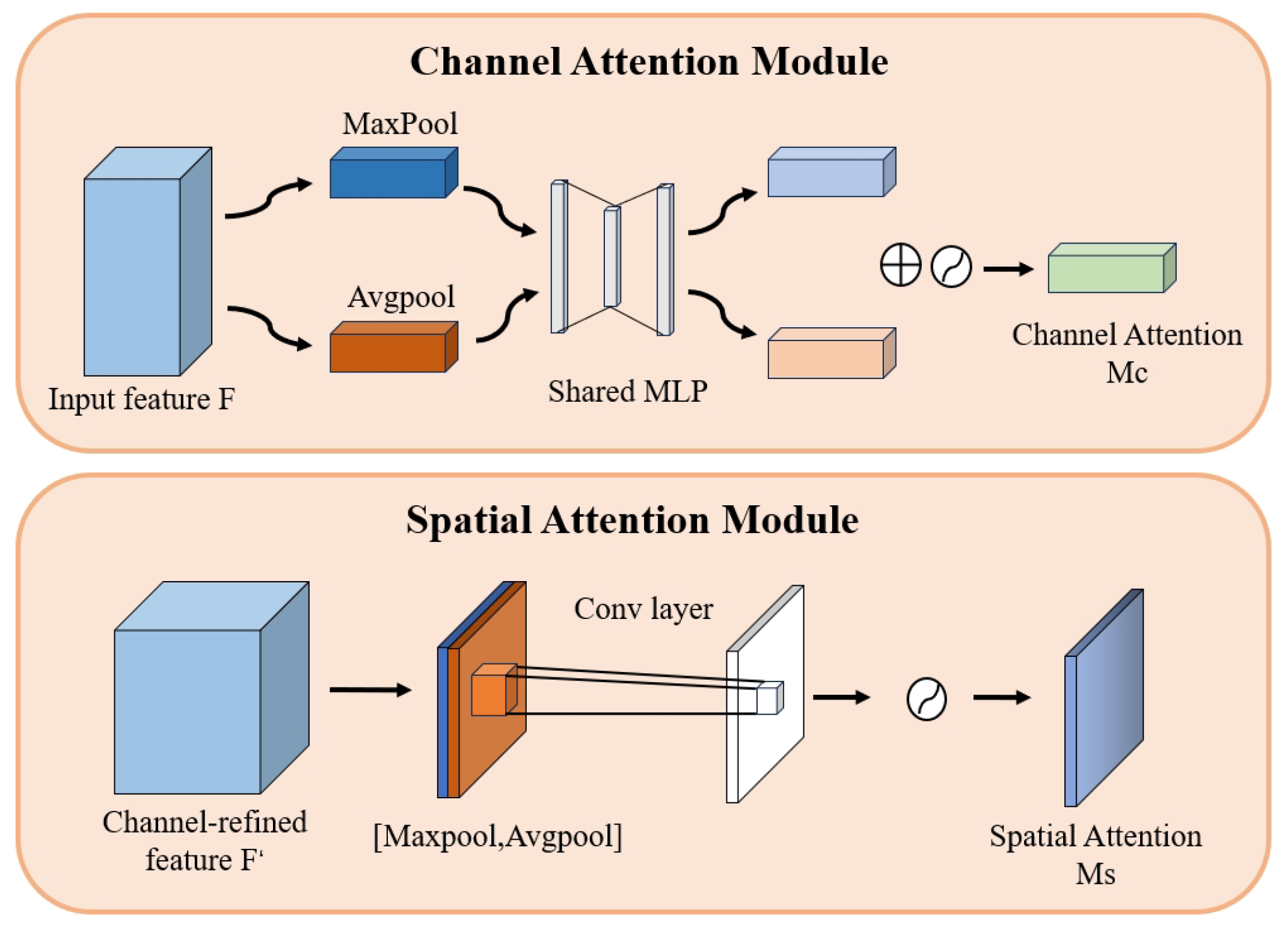
Figure 5.
The detailed structure of the CAM and SAM in the CBAM.
Figure 5.
The detailed structure of the CAM and SAM in the CBAM.
Figure 6.
Crack information extraction process.
Figure 6.
Crack information extraction process.
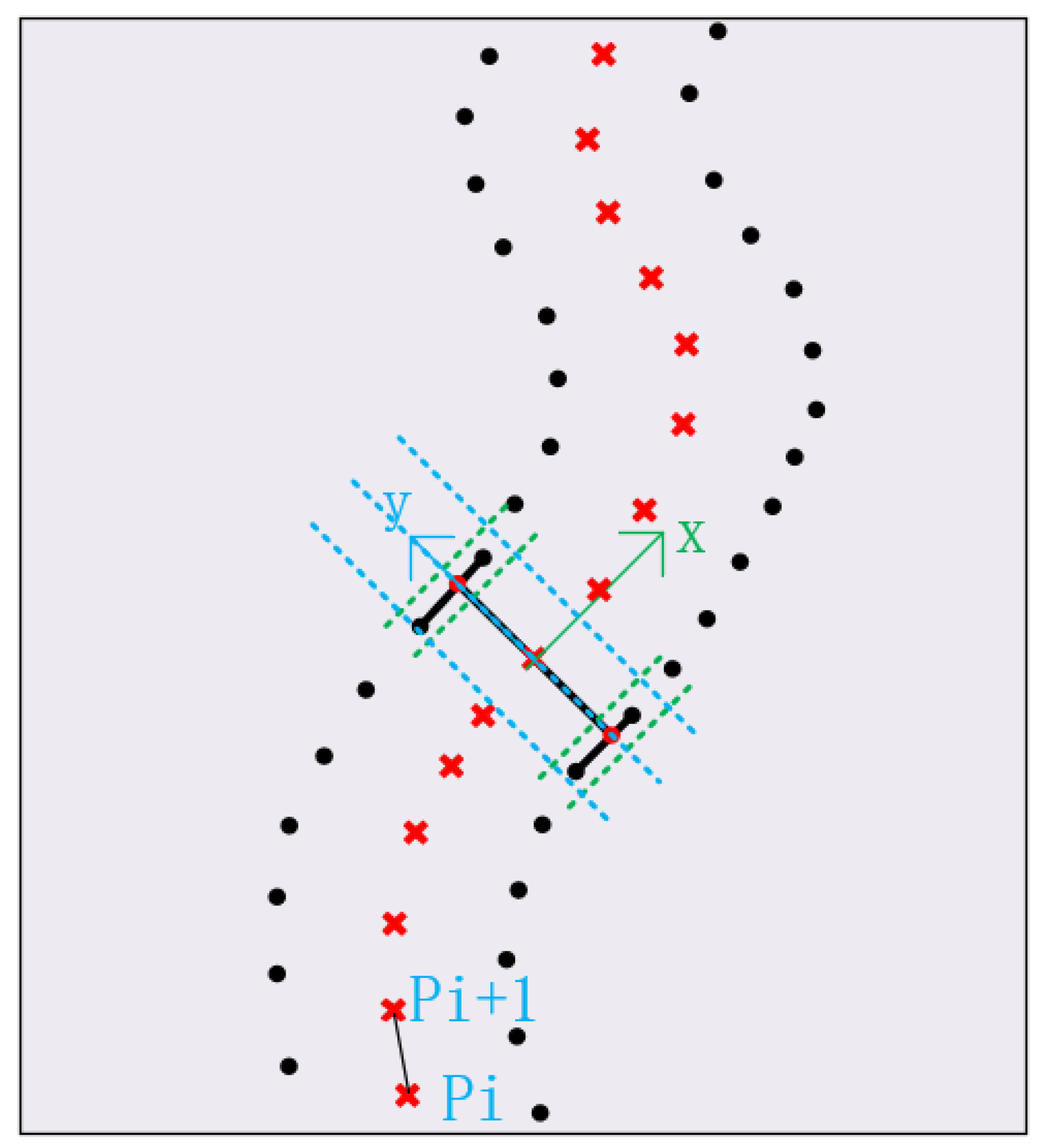
Figure 7.
Orthogonal skeleton line. (The black dots represent the boundaries of the cracks, and the red cross represent the centerlines).
Figure 7.
Orthogonal skeleton line. (The black dots represent the boundaries of the cracks, and the red cross represent the centerlines).
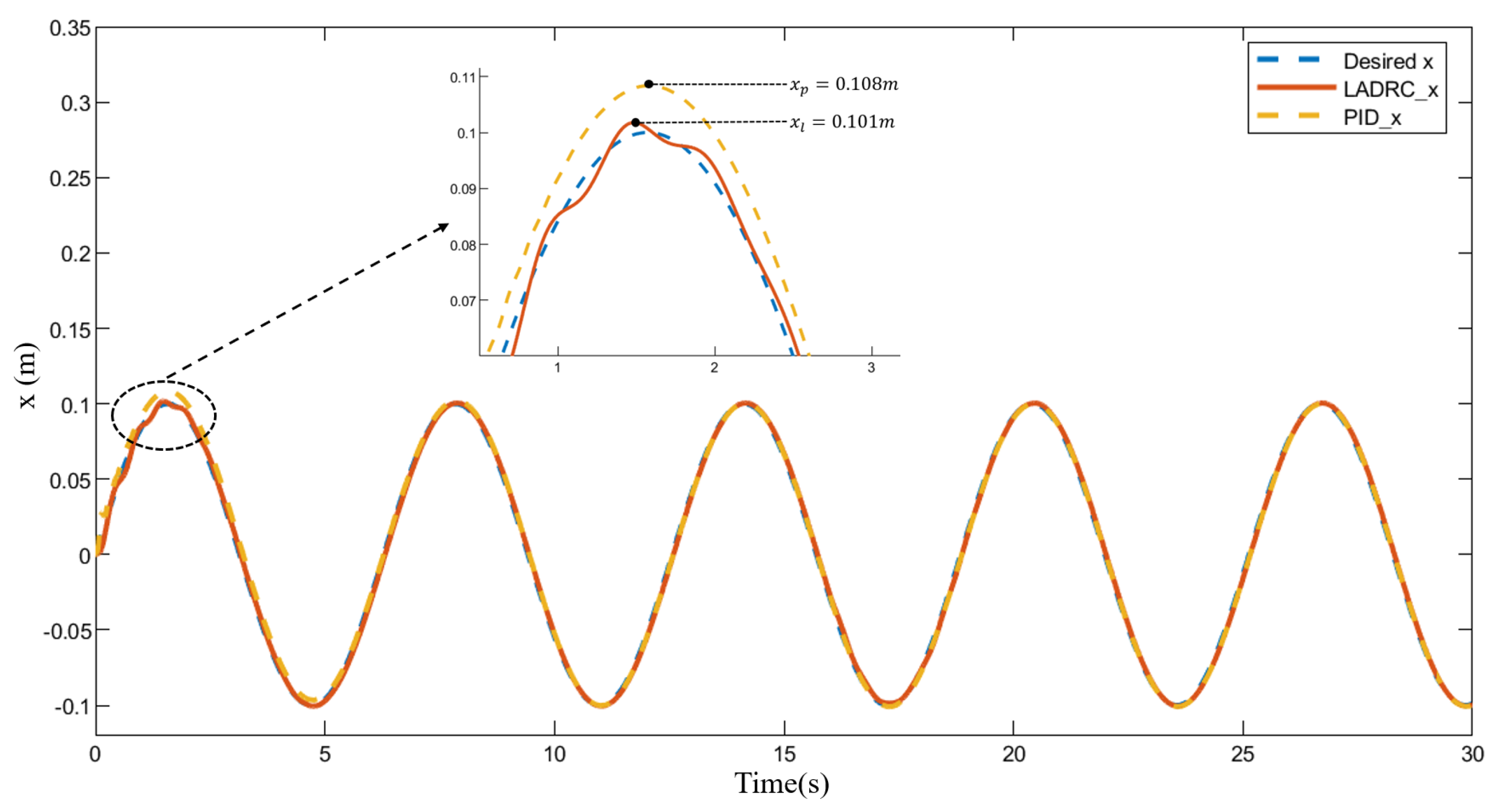
Figure 8.
x-direction trajectory tracking results.
Figure 8.
x-direction trajectory tracking results.
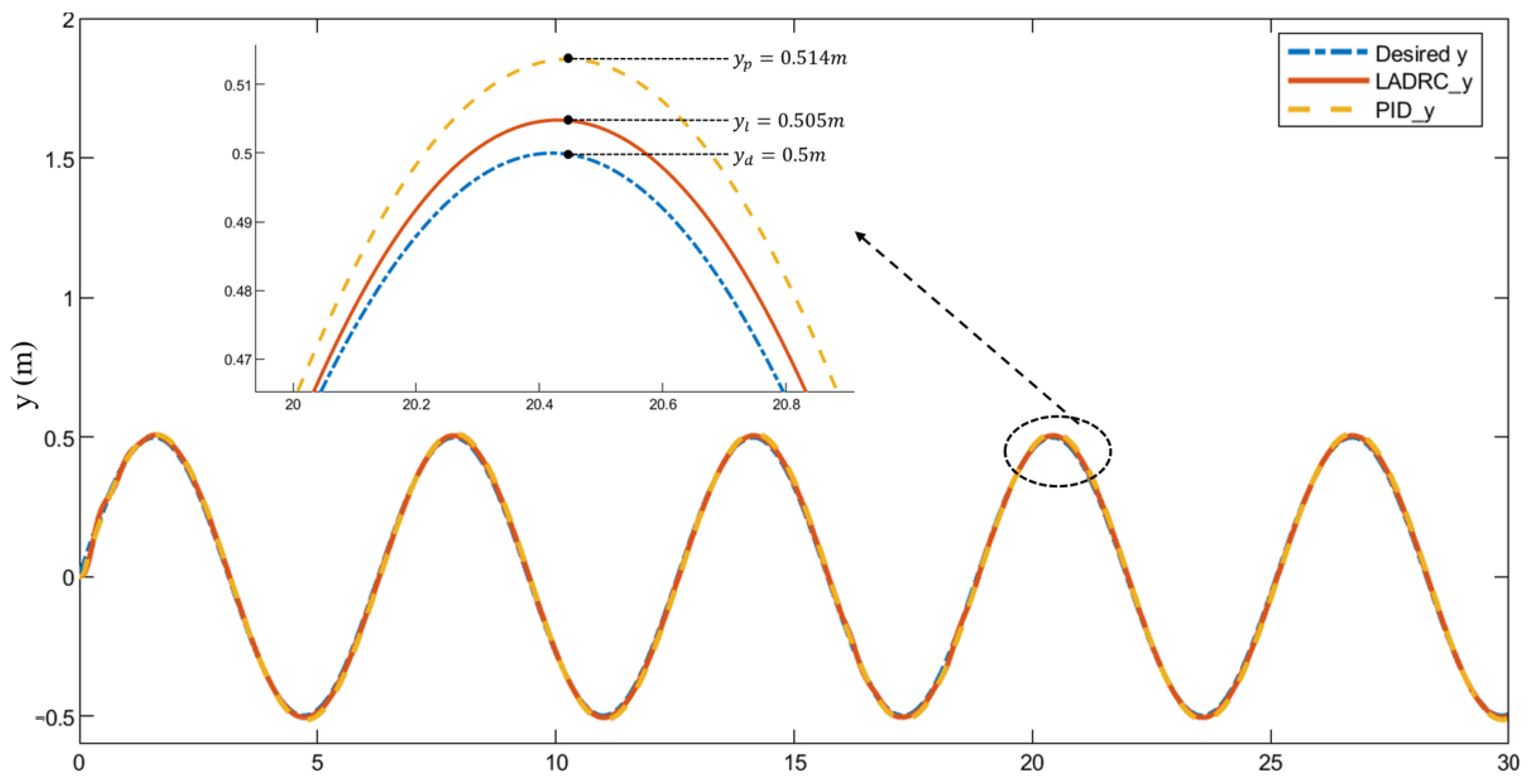
Figure 9.
y-direction trajectory tracking results.
Figure 9.
y-direction trajectory tracking results.
Figure 10.
z-direction trajectory tracking results.
Figure 10.
z-direction trajectory tracking results.
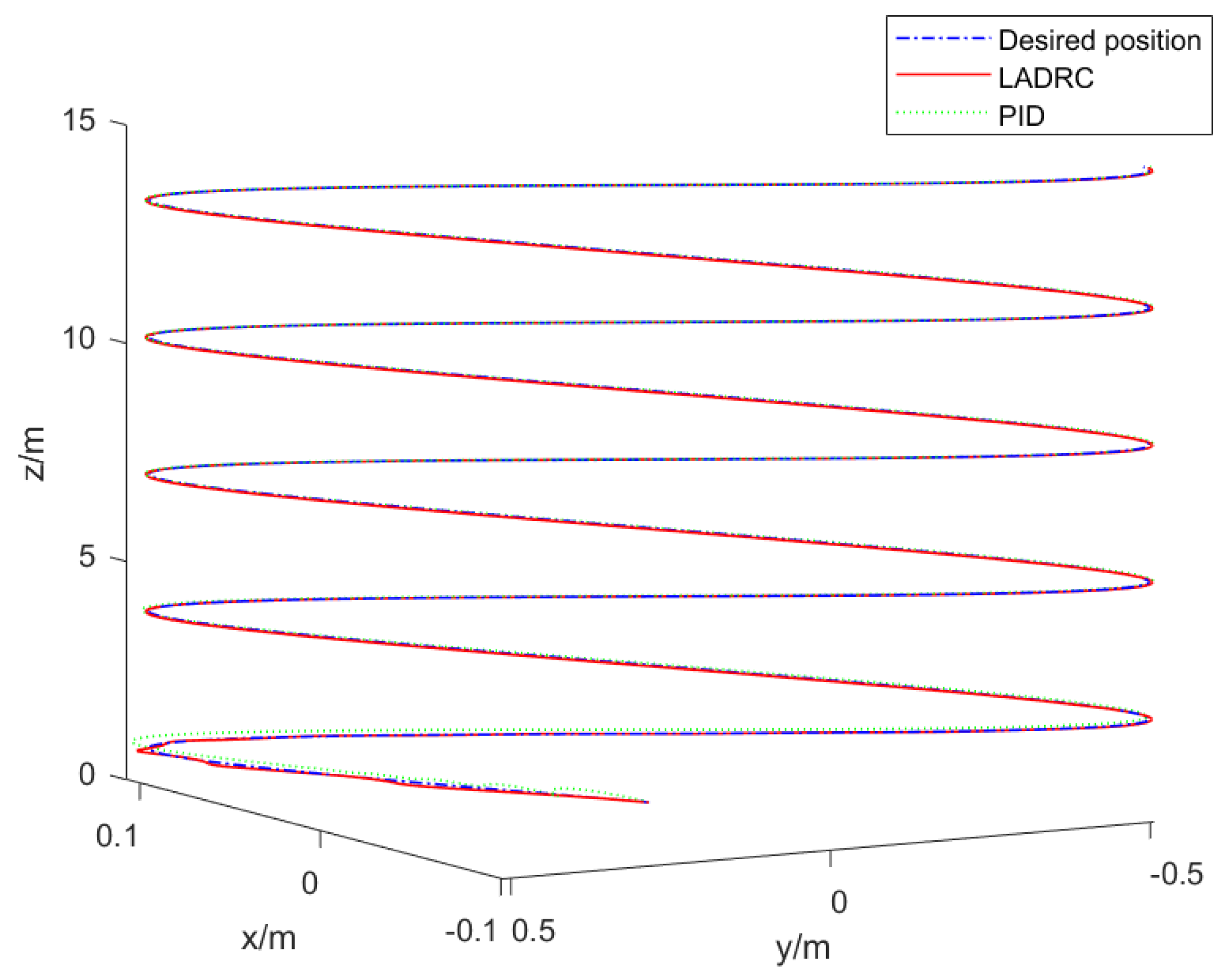
Figure 11.
3D trajectory tracking results.
Figure 11.
3D trajectory tracking results.
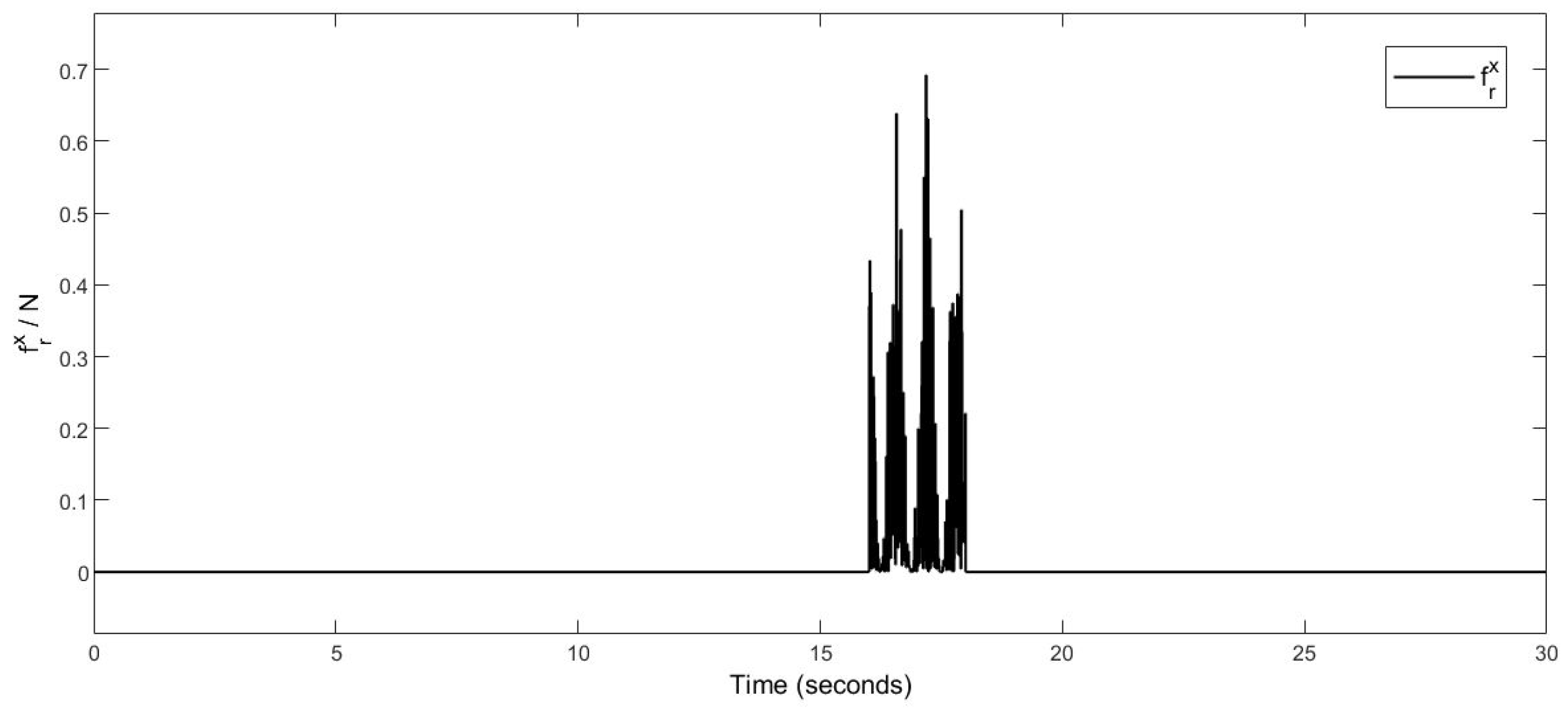
Figure 12.
Simulated wind magnitude and duration in the x-direction.
Figure 12.
Simulated wind magnitude and duration in the x-direction.
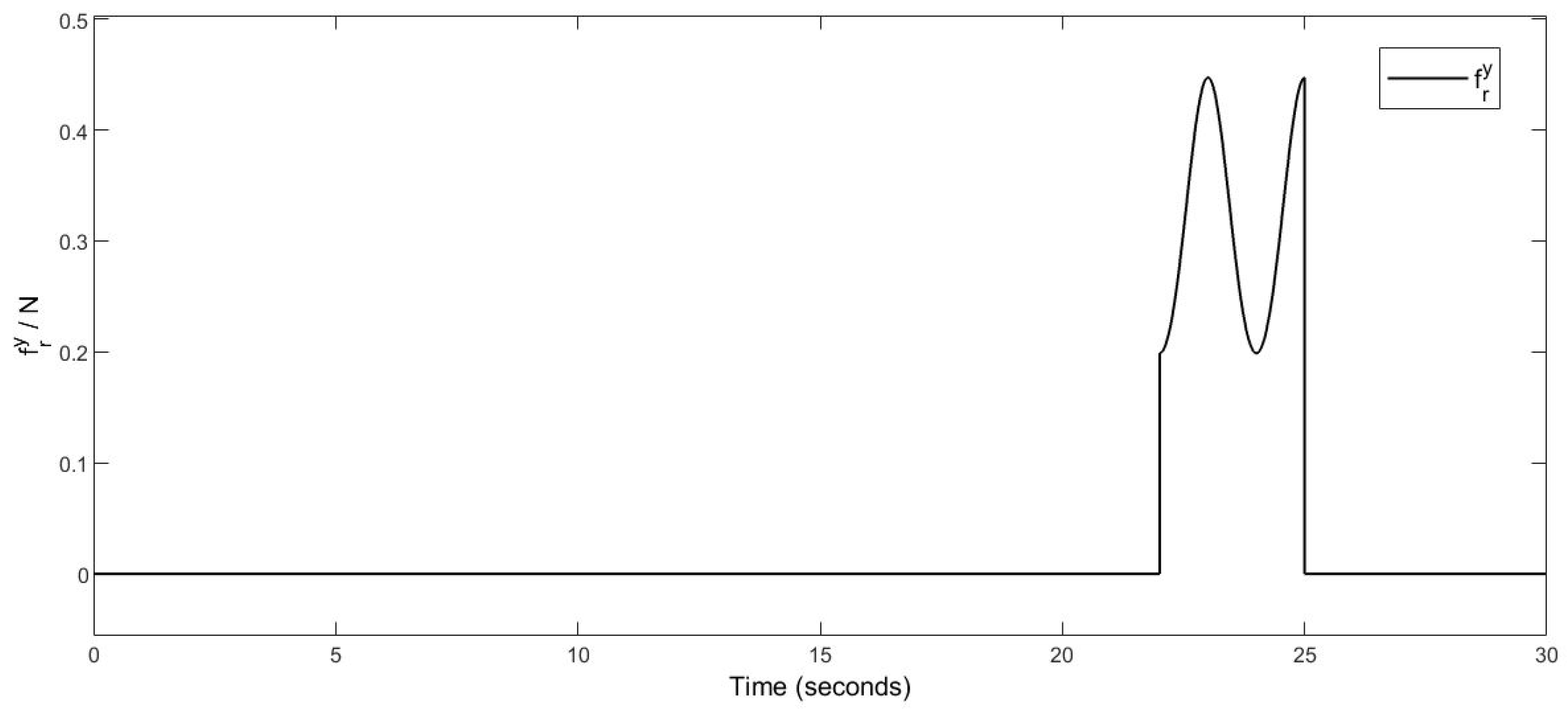
Figure 13.
Simulated wind magnitude and duration in the y-direction.
Figure 13.
Simulated wind magnitude and duration in the y-direction.
Figure 14.
x-direction trajectory tracking results under wind disturbances.
Figure 14.
x-direction trajectory tracking results under wind disturbances.
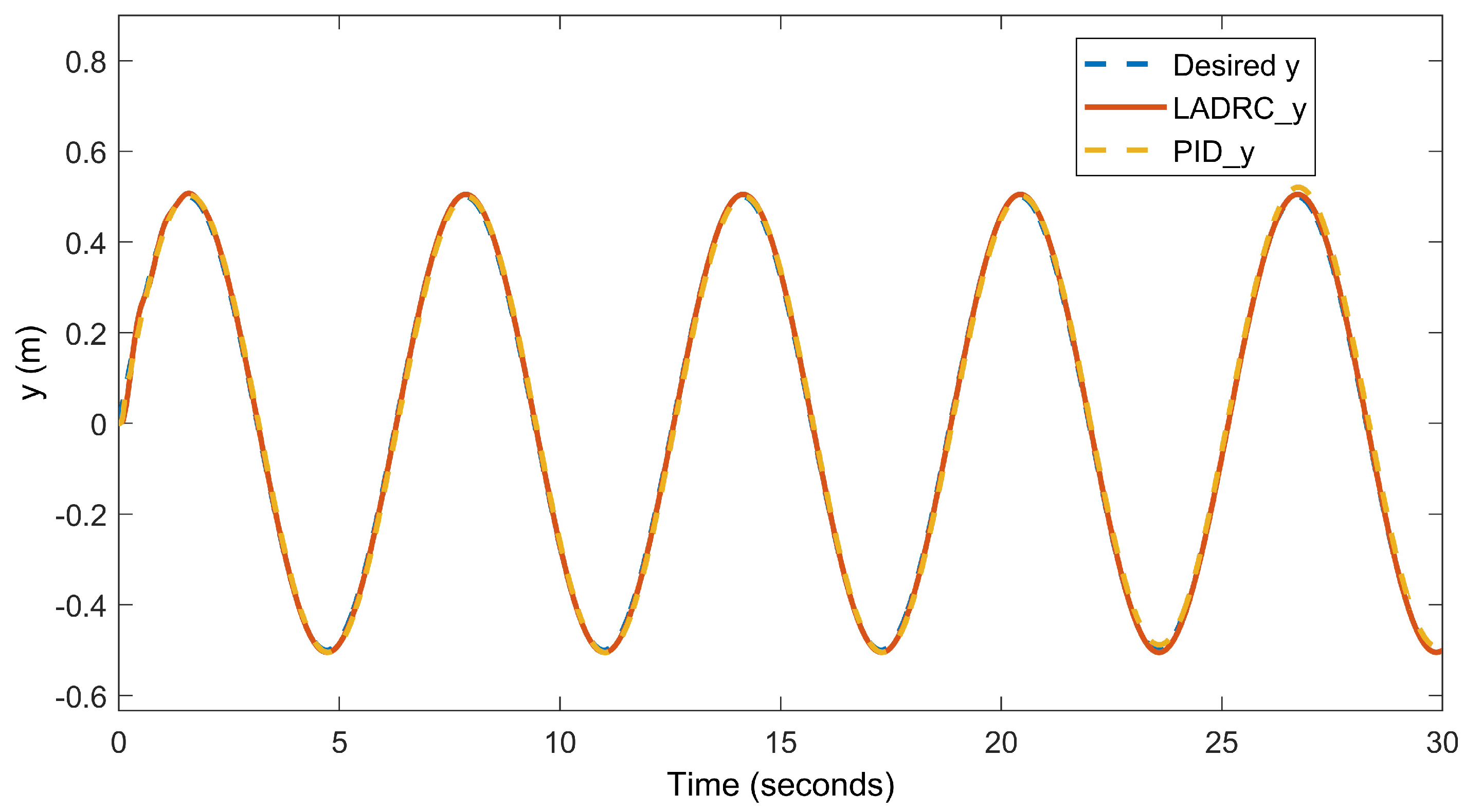
Figure 15.
y-direction trajectory tracking results under wind disturbances.
Figure 15.
y-direction trajectory tracking results under wind disturbances.
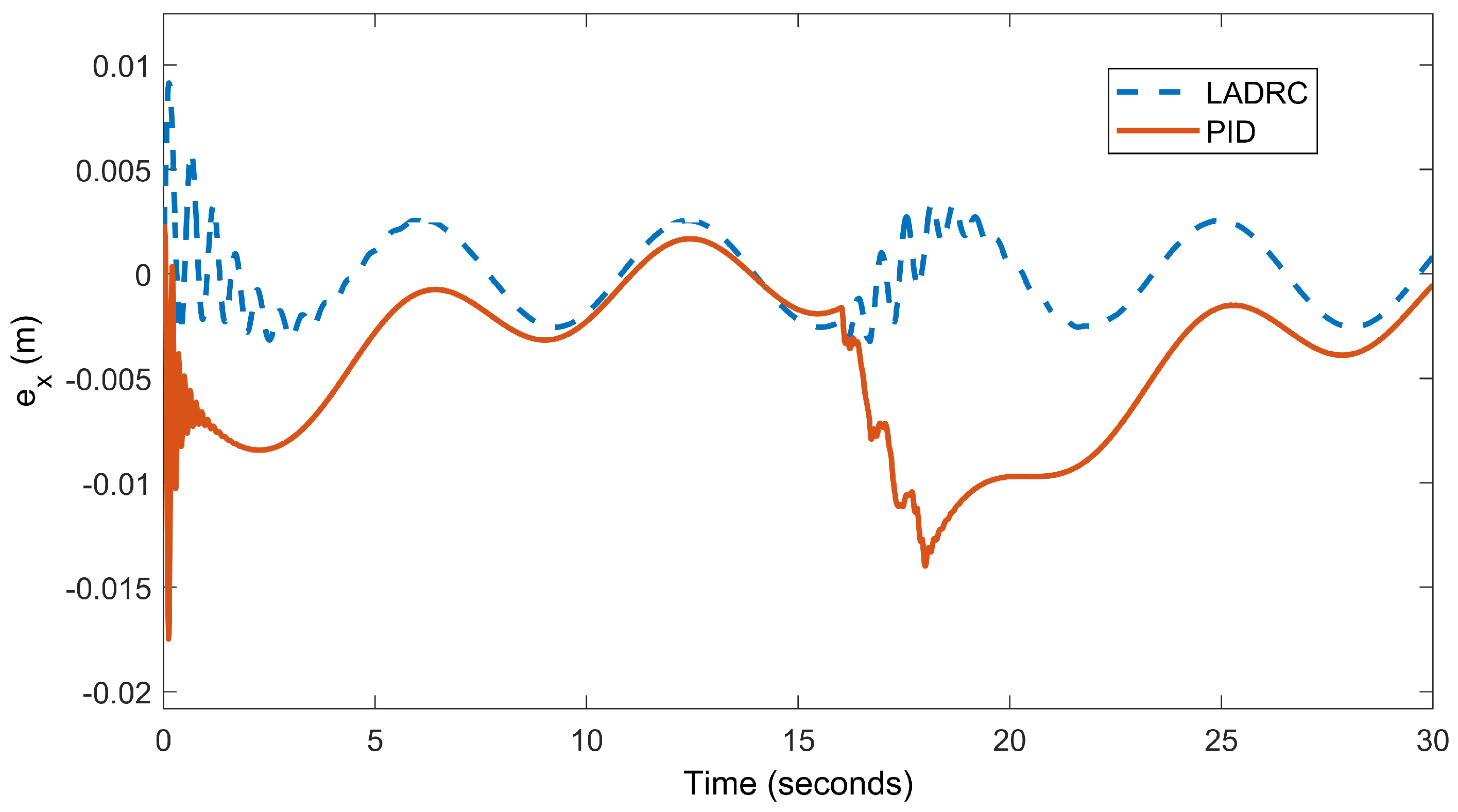
Figure 16.
The error response curves of the x-directions.
Figure 16.
The error response curves of the x-directions.
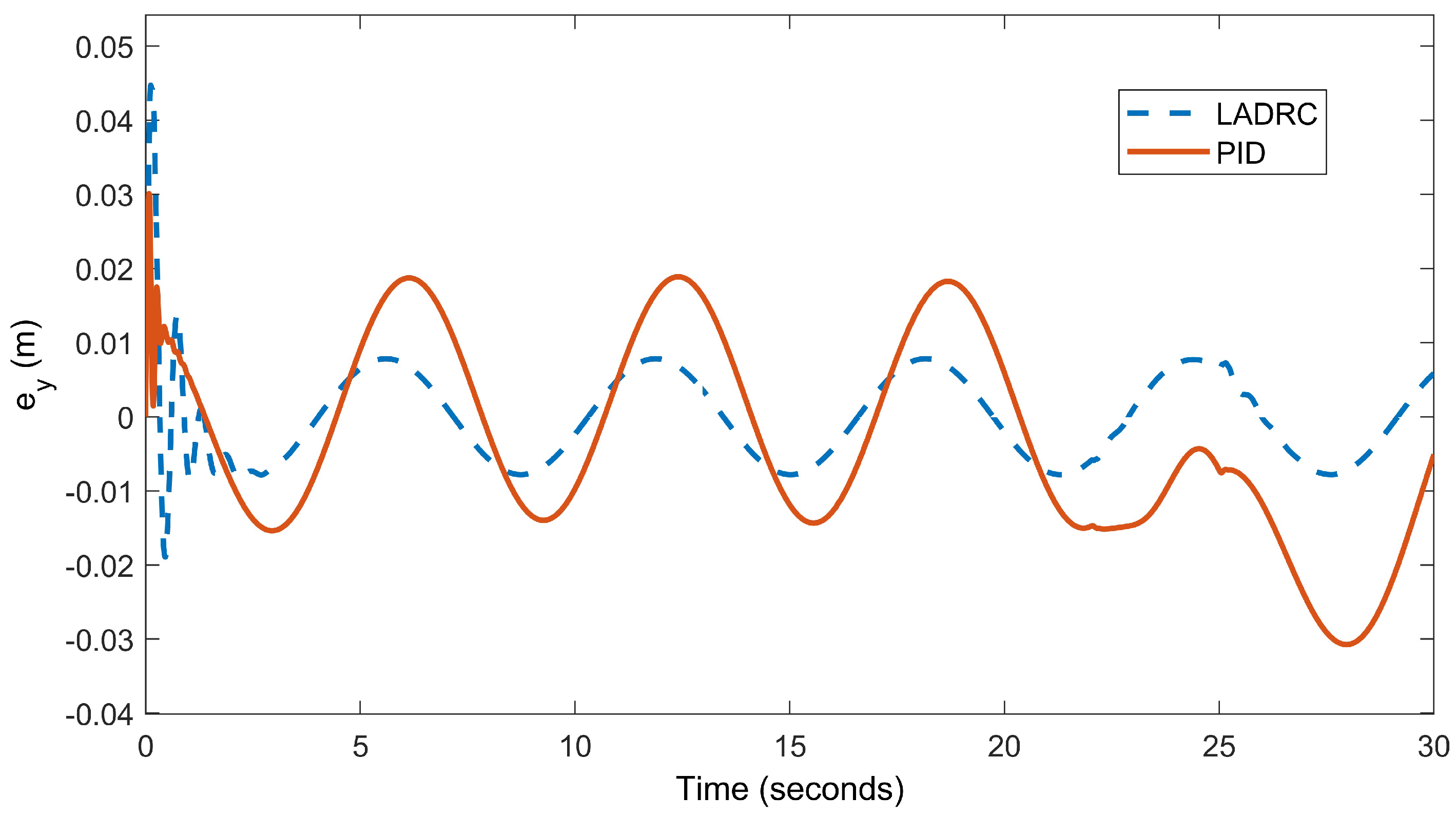
Figure 17.
The error response curves of the y-directions.
Figure 17.
The error response curves of the y-directions.
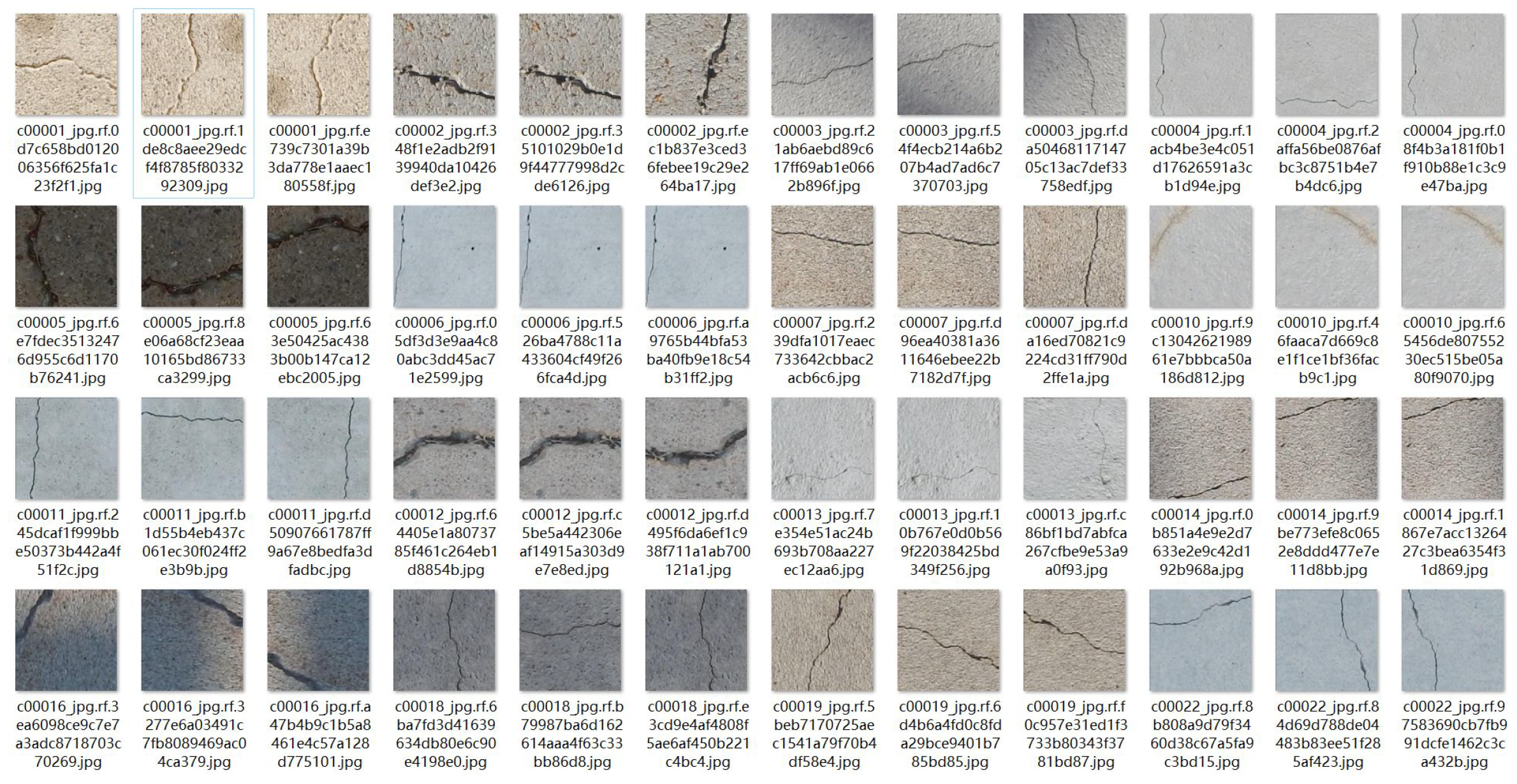
Figure 18.
Sample crack images from the CSD dataset.
Figure 18.
Sample crack images from the CSD dataset.
Figure 19.
Performance diagnostic curves for detection frames (the top-left is the precision–confidence curve, the top-right is the precision–recall curve, the bottom-left is the F1–confidence curve, and the bottom-right is the recall–confidence curve).
Figure 19.
Performance diagnostic curves for detection frames (the top-left is the precision–confidence curve, the top-right is the precision–recall curve, the bottom-left is the F1–confidence curve, and the bottom-right is the recall–confidence curve).
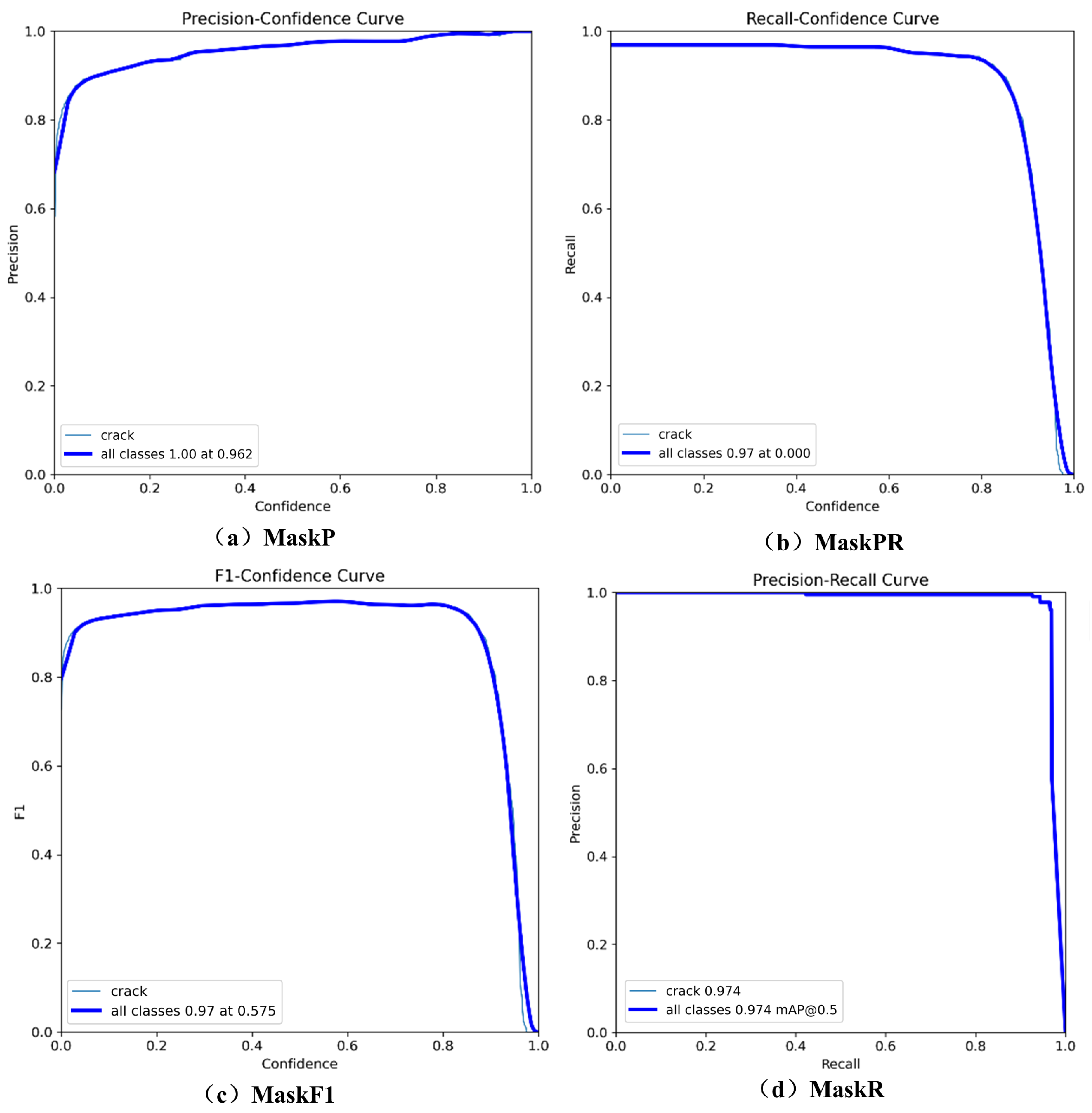
Figure 20.
Performance diagnostic curves for image segmentation (the top-left is the precision–confidence curve, the top-right is the precision–recall curve, the bottom-left is the F1–confidence curve, and the bottom-right is the recall–confidence curve).
Figure 20.
Performance diagnostic curves for image segmentation (the top-left is the precision–confidence curve, the top-right is the precision–recall curve, the bottom-left is the F1–confidence curve, and the bottom-right is the recall–confidence curve).
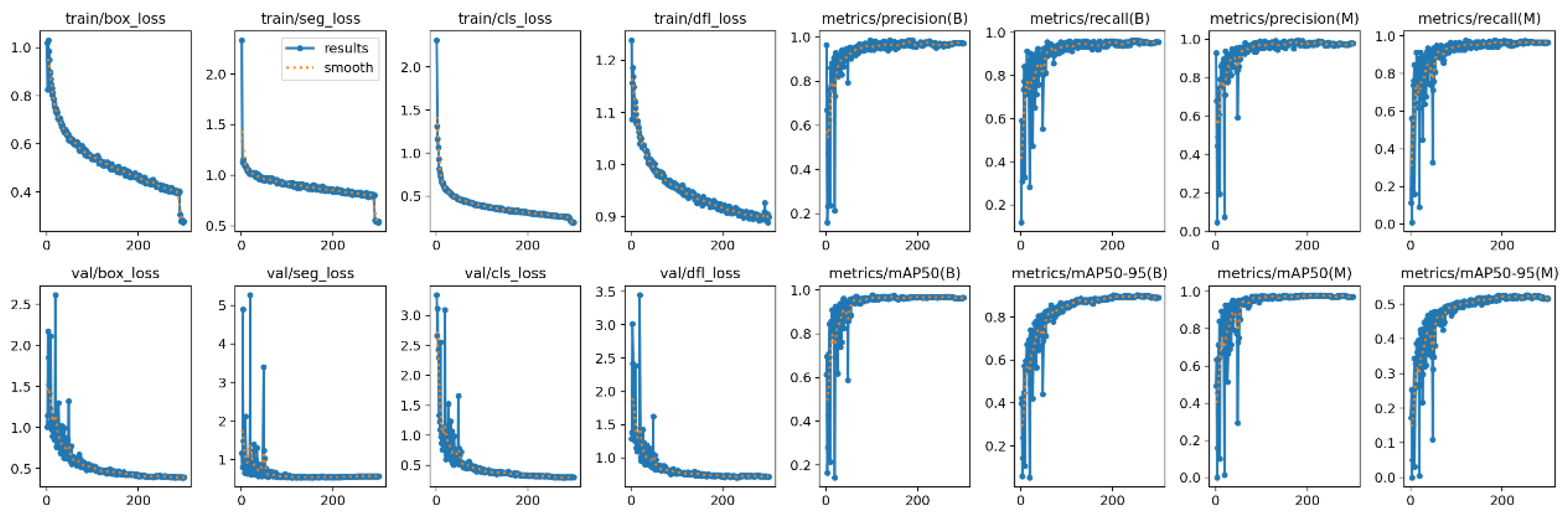
Figure 21.
The loss and performance metric variation curves of the YOLOv8-CBAM model during training and validation (the horizontal axis represents the training epochs, and the vertical axis represents various metrics such as loss values, precision, recall, and mAP).
Figure 21.
The loss and performance metric variation curves of the YOLOv8-CBAM model during training and validation (the horizontal axis represents the training epochs, and the vertical axis represents various metrics such as loss values, precision, recall, and mAP).
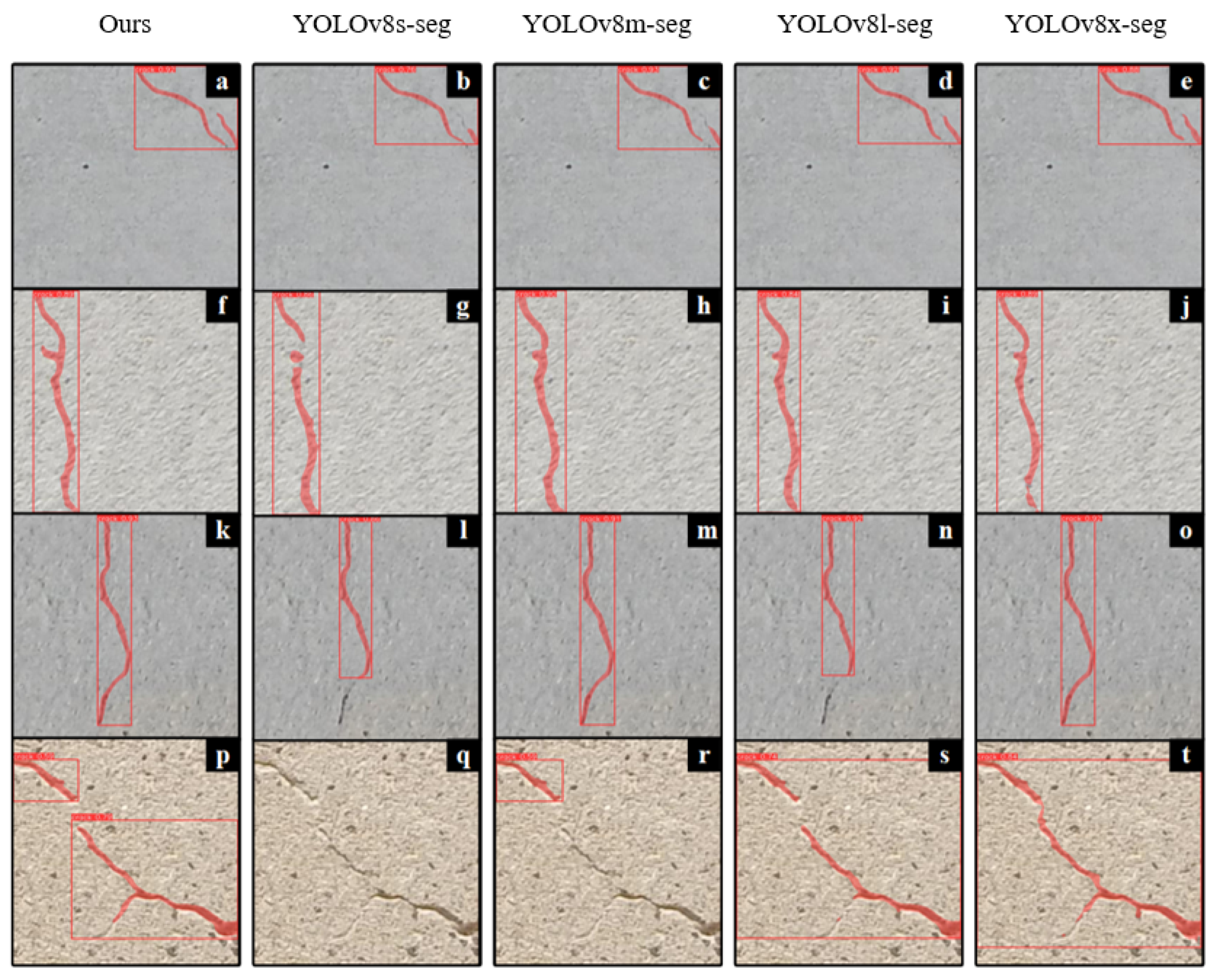
Figure 22.
The performance of the five models in crack detection (the red box is the detection box, and the red curve represents the detected cracks, (a–t) represent the crack detection conditions).
Figure 22.
The performance of the five models in crack detection (the red box is the detection box, and the red curve represents the detected cracks, (a–t) represent the crack detection conditions).
Figure 23.
UAV hardware integration.
Figure 23.
UAV hardware integration.
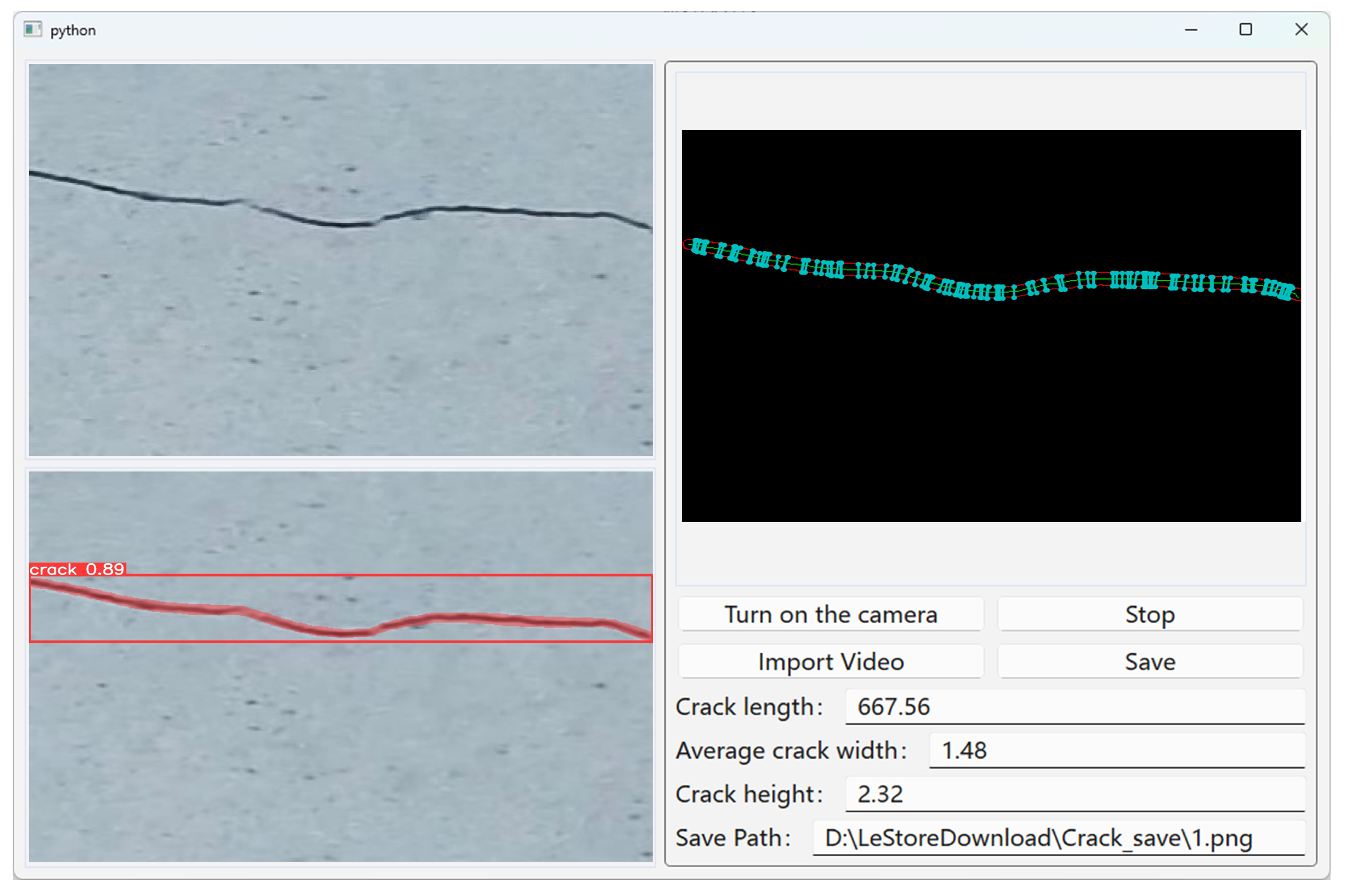
Figure 24.
Crack 1 detection interface (the top-left is the original image, the bottom-left is crack detection and annotation, and the right side is crack skeleton feature extraction and crack feature information).
Figure 24.
Crack 1 detection interface (the top-left is the original image, the bottom-left is crack detection and annotation, and the right side is crack skeleton feature extraction and crack feature information).
Figure 25.
Crack 2 detection interface (the top-left is the original image, the bottom-left is crack detection and annotation, and the right side is crack skeleton feature extraction and crack feature information).
Figure 25.
Crack 2 detection interface (the top-left is the original image, the bottom-left is crack detection and annotation, and the right side is crack skeleton feature extraction and crack feature information).
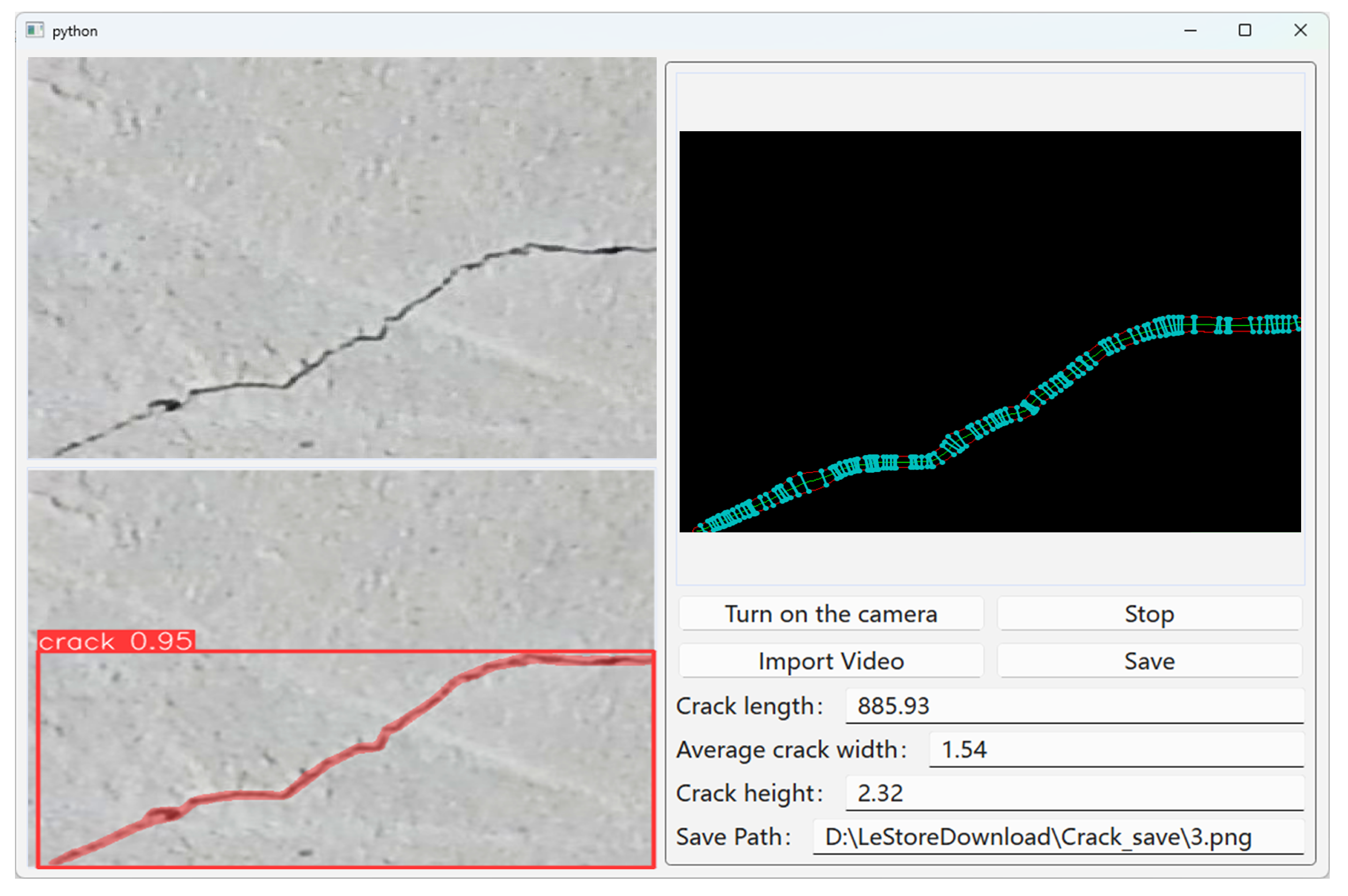
Figure 26.
Crack 3 detection interface (the top-left is the original image, the bottom-left is crack detection and annotation, and the right side is crack skeleton feature extraction and crack feature information).
Figure 26.
Crack 3 detection interface (the top-left is the original image, the bottom-left is crack detection and annotation, and the right side is crack skeleton feature extraction and crack feature information).
Table 1.
Machine learning-based crack detection method.
Table 1.
Machine learning-based crack detection method.
| Method | Dataset | Accuracy | Limitation |
|---|
| SVMRA (Fourier correction + SVM classification) [18] | Self-made dataset | The accuracy rate is increased by ≥25% under non-uniform illumination. | Rely on color features, unquantified rust depth. |
| SRIM (Simultaneous Multiparameter Modal Anomaly Detection) [19] | UNR Concrete Bridge; Columbia University Steel Arch Bridge. | Sensitivity: 93%; FAR: 9%; F1: 89%. | Dependent on sensors and insensitive to local damage. |
| 1. ANN predicts vehicle responses; 2. Gaussian process detection predicts the variation of error distribution [20]. | Vehicle-bridge interaction data of numerical simulation. | With a minor damage of 5%, the TPR reached 89%, strong anti-interference ability. | Rely on vehicle parameters; lack of damage location ability. |
| 1. Bayesian fusion for locating damage; 2. RSNB (Rough Set + Naive Bayes) quantifies the degree of damage [21]. | Continuous bridge vibration data of numerical simulation. | SNB (under 15% noise.): 94.3%; the damage location error < 0.5 m; the quantification error of the damage degree < 8%. | Accuracy requirement of modal data is high; high demand for sensors. |
| CNN-based Image Block Classification Model [22]. | Self-made dataset (500 images of road surface cracks) | Precision: 86.96%, Recall: 75.87%, F1: 89.65%(Significant improvement) | Block-wise processing may ignore global crack context. |
| Edge-Deployed DeepCrack Training Model [23]. | Self-made dataset (260 images of road surface cracks) | F-measure > 0.87 | Limited performance under complex backgrounds. |
| BARNet (Dual-Path Architecture and Boundary Awareness Mechanism) [24] | CIDF (Crack Instance Detection Dataset) | F1-score: 91.3%, BIoU 74.2%, HD(px) 3.9. | Rely on high-quality original image gradients;
the 3D geometric characteristics of the unmodeled cracks. |
| Improved YOLO-v3 Model [25] | Self-made dataset (1860 original images of concrete wind erosion) | Accuracy: 96.32%, Precision: 95.68%, mAP: 75.68%. | Data scale limitations, unquantified damage degree. |
| Improved YOLOv8 with GAM and Wise-IoU Loss. [26] | HKBCD (Local bridge crack images in Hong Kong) | Precision: 97.4%, Recall: 94.9%, F1: 96.1%, mAP50: 98.1%, mAP50-95: 76.2% (Significant improvement), mAP75: 97.8%. | Model complexity is high; insufficient detection of small cracks. |
Table 2.
UAV simulation parameters.
Table 2.
UAV simulation parameters.
| Parameter Symbol | Numerical Value |
|---|
| UAV weight | 2.3 kg |
| Wheelbase d | 0.55 m |
| Drag coefficient | |
| Torque coefficient | |
| Gravitational acceleration g | |
| Moment of inertia | |
| Moment of inertia | |
| Moment of inertia | |
| Average drag coefficient | 0.09 |
| Aerodynamic drag coefficient | 0.014 |
Table 3.
LADRC parameters for UAV control.
Table 3.
LADRC parameters for UAV control.
| Channel | | | | b |
|---|
| x | 8.95 | 2.31 | 3 | 0.1 |
| y | 7.8 | 3.2 | 0.8 | 0.8 |
| z | 9 | 3.5 | 10 | 0.01 |
| 13.1 | 21.6 | 3 | 0.95 |
| 15 | 19 | 3 | 0.98 |
| 5 | 8 | 1.1 | 0.99 |
Table 4.
PID parameters for UAV control.
Table 4.
PID parameters for UAV control.
| Channel | P | I | D |
|---|
| x | 1.5 | 0.001 | 2.1 |
| y | 1.8 | 0.001 | 2.33 |
| z | 4.5 | 0.001 | 3 |
| 0.5 | 0.05 | 2.82 |
| 0.8 | 0.15 | 3.2 |
| 1.5 | 0.1 | 2.91 |
Table 5.
Simulation wind field parameters and their definitions.
Table 5.
Simulation wind field parameters and their definitions.
| Parameter | Value | Definition |
|---|
| 1.225 kg/m3 | Air density |
| 0.0995 | Drag coefficient |
| A | 0.051 m2 | Frontal area |
| 15 m/s | Maximum wind speed in x direction |
| 10 m/s | Maximum wind speed in y direction |
| | Constant |
| T | 5 s | Gust duration |
Table 6.
Robustness comparison of two controllers under wind disturbance conditions (in the x-direction). (The best data is bolded).
Table 6.
Robustness comparison of two controllers under wind disturbance conditions (in the x-direction). (The best data is bolded).
| Metric | PID | LADRC |
|---|
| Maximum deviation | 0.011 m | 0.001 m |
| Recovery time | 6.73 s | 0.403 s |
Table 7.
Software and hardware version models.
Table 7.
Software and hardware version models.
| Software/Hardware | Version and Model |
|---|
| GPU | RTX 3090 |
| CPU | Intel® CoreTM i9-10900 |
| Deep Learning Framework | PyTorch 2.2 |
| CUDA | 11.3 |
| Python | 3.8 |
Table 8.
Hyperparameters for YOLOv8-CBAM model training.
Table 8.
Hyperparameters for YOLOv8-CBAM model training.
| Hyperparameter | Value |
|---|
| Learning Rate | 0.01 |
| Momentum | 0.937 |
| Weight Decay | 0.0005 |
| Batch Size | 16 |
| Epochs | 300 |
Table 9.
Performance comparison of different model detection frames based on the test set (the best data is bolded).
Table 9.
Performance comparison of different model detection frames based on the test set (the best data is bolded).
| Model | BoxP | BoxR | BoxF1 | mAP50 | mAP50-95 | Box Loss |
|---|
| YOLOv8-CBAM | 96.2 % | 97% | 96% | 96.7% | 91.73% | 0.39171 |
| YOLOv8s-SE | 97.5% | 97% | 97% | 96.2% | 91.30% | 0.3705 |
| YOLOv8s-ECA | 97.3% | 97% | 96% | 96.6% | 91.16% | 0.3756 |
| YOLOv8s-seg | 99.7% | 96% | 96% | 96.8% | 90.26% | 0.3526 |
| YOLOv8m-seg | 97.9% | 98% | 96% | 97.0% | 91.64% | 0.3477 |
| YOLOv8l-seg | 98.6% | 97% | 96% | 97.2% | 91.36% | 0.3831 |
| YOLOv8x-seg | 98.6% | 97% | 96% | 97.3% | 92.09% | 0.3662 |
Table 10.
Performance comparison of different model segmentation based on the test set (the best data is bolded).
Table 10.
Performance comparison of different model segmentation based on the test set (the best data is bolded).
| Model | MaskP | MaskR | MaskF1 | mAP50 | mAP50-95 | Mask Loss |
|---|
| YOLOv8-CBAM | 97.0% | 98% | 97% | 98.4% | 54.77% | 0.5372 |
| YOLOv8s-SE | 97.3% | 97% | 97% | 97.9% | 53.76% | 0.5396 |
| YOLOv8s-ECA | 97.5% | 97% | 97% | 97.8% | 53.57% | 0.5492 |
| YOLOv8s-seg | 99.7% | 97% | 97% | 97.6% | 52.66% | 0.5516 |
| YOLOv8m-seg | 97.9% | 98% | 97% | 98.1% | 53.69% | 0.5457 |
| YOLOv8l-seg | 98.6% | 98% | 97% | 98.0% | 53.85% | 0.5445 |
| YOLOv8x-seg | 98.2% | 97% | 97% | 97.2% | 53.79% | 0.5497 |
Table 11.
Comparison of different model parameters (the best data is bolded).
Table 11.
Comparison of different model parameters (the best data is bolded).
| Model | Parameters (M) | File Size (MB) | FLOPs (G) | Inference Time (ms) |
|---|
| YOLOv8-CBAM | 11.7 | 15.1 | 25.8 | 7.6 |
| YOLOv8-SE | 12.0 | 15.7 | 26.1 | 8.0 |
| YOLOv8-ECA | 11.9 | 15.9 | 25.9 | 7.9 |
| YOLOv8s-seg | 11.4 | 14.5 | 24.6 | 7.2 |
| YOLOv8m-seg | 25.9 | 32.8 | 78.9 | 12.1 |
| YOLOv8l-seg | 43.7 | 55.2 | 165.4 | 20.3 |
| YOLOv8x-seg | 68.2 | 86.7 | 257.8 | 31.7 |
Table 12.
Power consumption and flight duration under different flight modes.
Table 12.
Power consumption and flight duration under different flight modes.
| Flight Mode | Average Power (W) | Flight Duration (min) |
|---|
| Hover Inspection | 160.51 | 41 |
| Low-speed Patrol | 180.00 | 37 |
| Wind Disturbance Rejection Mode | 200.00 | 33 |
Table 13.
Three types of crack detection interfaces are displayed.
Table 13.
Three types of crack detection interfaces are displayed.
| Crack | Box IoU | Mask IoU | Pixel Accuracy |
|---|
| Crack NO.1 | 84.50% | 86.85% | 99.20% |
| Crack NO.2 | 88.23% | 90.32% | 99.73% |
| Crack NO.3 | 86.94% | 96.33% | 98.96% |









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}