
Development of Magnetic Hysteresis Loop Measurement System for Characterization of 3D-Printed Magnetic Cores




Abstract
1. Introduction
Industrial Equipment for Hysteresis Measurement of Magnetic Cores
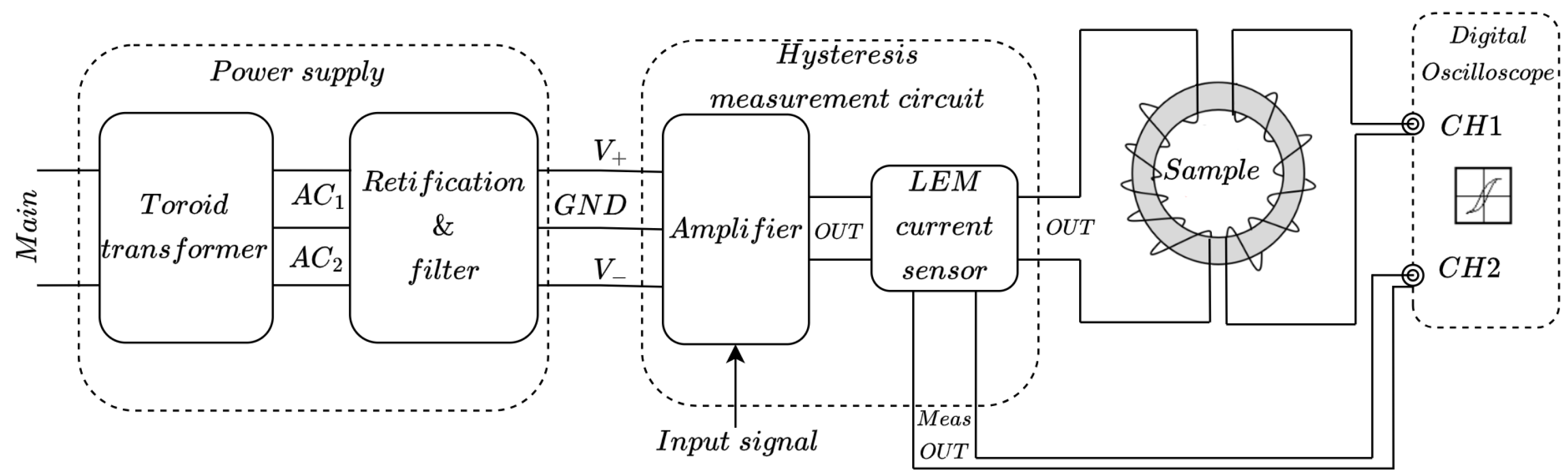
2. Requirements and Design of Electrical Circuit
2.1. Design of Power Supply
2.2. Design of Amplifier Circuit
3. Simulation Results
- Gains verification;
- Current limiter verification;
- Frequency response verification (Bode plot).
4. Printed Circuit Board Design
5. Laboratory Test
5.1. Measurement Sample and Laboratory Setup
5.2. Reference Measurements
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hubert, A.; Schäfer, R. The Physics of Ferromagnetism; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Jiles, D. Review of magnetic hysteresis modeling. IEEE Trans. Magn. 2015, 51, 1–7. [Google Scholar]
- Jiang, D.; Burgos, R.; Wang, F.; Boroyevich, D. Temperature-dependent characteristics of SiC devices: Performance evaluation and loss calculation. IEEE Trans. Power Electron. 2011, 27, 1013–1024. [Google Scholar] [CrossRef]
- Kuczmann, M.; Orosz, T. Temperature-Dependent Ferromagnetic Loss Approximation of an Induction Machine Stator Core Material Based on Laboratory Test Measurements. Energies 2023, 16, 1116. [Google Scholar] [CrossRef]
- Orosz, T.; Horváth, T.; Tóth, B.; Kuczmann, M.; Kocsis, B. Iron loss calculation methods for numerical analysis of 3D-printed rotating machines: A review. Energies 2023, 16, 6547. [Google Scholar] [CrossRef]
- Sarap, M.; Kallaste, A.; Shams Ghahfarokhi, P.; Tiismus, H.; Vaimann, T. Utilization of additive manufacturing in the thermal design of electrical machines: A review. Machines 2022, 10, 251. [Google Scholar] [CrossRef]
- Ghahfarokhi, P.S.; Podgornovs, A.; Kallaste, A.; Cardoso, A.J.M.; Belahcen, A.; Vaimann, T.; Tiismus, H.; Asad, B. Opportunities and challenges of utilizing additive manufacturing approaches in thermal management of electrical machines. IEEE Access 2021, 9, 36368–36381. [Google Scholar] [CrossRef]
- Liu, L.; Ge, T.; Ngo, K.D.; Mei, Y.; Lu, G.Q. Ferrite paste cured with ultraviolet light for additive manufacturing of magnetic components for power electronics. IEEE Magn. Lett. 2018, 9, 5102705. [Google Scholar] [CrossRef]
- Kokkinis, D.; Schaffner, M.; Studart, A.R. Multimaterial magnetically assisted 3D printing of composite materials. Nat. Commun. 2015, 6, 8643. [Google Scholar] [CrossRef]
- Kallaste, A.; Vaimann, T.; Rassãlkin, A. Additive design possibilities of electrical machines. In Proceedings of the 2018 IEEE 59th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 12–13 November 2018; IEEE: Washington, DC, USA, 2018; pp. 1–5. [Google Scholar]
- Tiismus, H.; Kallaste, A.; Belahcen, A.; Tarraste, M.; Vaimann, T.; Rassõlkin, A.; Asad, B.; Ghahfarokhi, P.S. AC Magnetic Loss Reduction of SLM Processed Fe-Si for Additive Manufacturing of Electrical Machines. Energies 2021, 14, 1241. [Google Scholar] [CrossRef]
- Kallaste, A.; Tiismus, H.; Belahcen, A.; Rassõlkin, A.; Vaimann, T.; Arumägi, E. Frequency dependence of magnetic losses in Fe–Si alloy produced by additive manufacturing. J. Magn. Magn. Mater. 2021, 537, 168159. [Google Scholar] [CrossRef]
- Bramerdorfer, G.; Luginger, D.; Ebner, M.; Pirker, B.; Schrödl, M. Design optimization of electrical machines by finite-element-based surrogate models including magnetization characteristics. IEEE Trans. Ind. Electron. 2018, 65, 1575–1584. [Google Scholar] [CrossRef]
- Bertotti, G. Hysteresis in Magnetism: For Physicists, Materials Scientists, and Engineers; Academic Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Li, W.F.; Sepehri-Amin, H.; Sakuma, N.; Hono, K. Temperature dependence of coercivity in Nd–Fe–B alloy films. J. Magn. Magn. Mater. 2003, 266, 220–226. [Google Scholar]
- Ge, T.; Zhang, Z.; Zhao, Z.; Fu, Z. Temperature dependence of the magnetic properties of hard magnetic materials. J. Magn. Magn. Mater. 2001, 234, 350–356. [Google Scholar] [CrossRef]
- Munoz, V.; Martinez, M.C.; Such, V. Improved systems for the measurement of hysteresis loops: DC and AC characterisation. J. Phys. Sci. Instrum. 1987, 20, 861. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J.; Jiang, Y. Effect of Cutting Stress on Magnetic Properties of Non-oriented Electrical Steel. In Proceedings of the 2023 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 27–29 October 2023; pp. 1–2. [Google Scholar] [CrossRef]
- Nemeth, Z.; Kuczmann, M. Measuring and simulating magnetic characteristics using epstein frame. Pollack Period. Pollack Period. 2018, 13, 15–26. [Google Scholar] [CrossRef]
- Parent, G.; Penin, R.; Lecointe, J.P.; Brudny, J.F.; Belgrand, T. Determination of Specific Losses in the Limbs of an Epstein Frame Using a Three Epstein Frame Methodology Applied to Grain Oriented Electrical Steels. Sensors 2016, 16, 826. [Google Scholar] [CrossRef]
- Koprivica, B.; Milovanovic, A.; Brkovic, V. Electrical steel testing using modified Epstein frame. In Proceedings of the International Scientific Conference, Gabrovo, Bulgaria, 18–19 November 2016; pp. 18–19. [Google Scholar]
- Mohammadi Fathabad, S.; Shahri, F. BH hysteresis measurement system for thin soft magnetic materials. Measurement 2021, 172, 108896. [Google Scholar] [CrossRef]
- Guo, P.; Huang, W.; Feng, X.; Zhang, Z.; Liu, Y. Hysteresis Measurement and Generic Modeling of Magnetostrictive Materials Under High-Frequency Excitation and High-Intensity Bias Field. Measurement 2023, 210, 112572. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, X.; Zhao, Z.; Zou, X.; Xiao, Y.; Li, G. Measurement and modeling of hysteresis characteristics in ferromagnetic materials. AIP Adv. 2019, 9, 025111. [Google Scholar] [CrossRef]
- Kouhpanji, M.R.Z.; Stadler, B.J.H. Assessing the reliability and validity ranges of magnetic characterization methods. arXiv 2020, arXiv:2003.06911. [Google Scholar]
- Balakrishna, A.R. Rethinking hysteresis in magnetic materials. MRS Commun. 2024, 14, 835–845. [Google Scholar] [CrossRef]
- DeCamp, M.F.; Bhatt, S.; Hossain, M.T.; Wu, W.; Jungfleisch, M.B. Demonstration of high-throughput magnetic hysteresis measurements based on THz emission. J. Appl. Phys. 2023, 134, 233901. [Google Scholar] [CrossRef]
- Kocsis, B.; Orosz, T. Frequency- and Temperature-Dependent Uncertainties in Hysteresis Measurements of a 3D-Printed FeSi wt6.5% Material. Sensors 2024, 24, 2738. [Google Scholar] [CrossRef] [PubMed]
- Eckel Magnet Test Equipment. Robograph RE; Eckel Magnet Test Equipment: Berge, Germany, 2025. [Google Scholar]
- Iwatsu Electric Co., Ltd. B-H Analyzer SY-8218; Iwatsu Electric Co., Ltd.: Tokyo, Japan, 2025. [Google Scholar]
- Zhao, H.; Zhao, X.; Xu, S.; Liu, W. Energy Loss Prediction of Soft Magnetic Materials Based on Nonlinear Preisach Model. In Proceedings of the 2022 IEEE 20th Biennial Conference on Electromagnetic Field Computation (CEFC), Virtual, 24–26 October 2022; pp. 1–2. [Google Scholar] [CrossRef]
- Magnet-Physik Dr. Steingroever GmbH. Remagraph® C; Magnet-Physik Dr. Steingroever GmbH: Cologne, Germany, 2023. [Google Scholar]
- Omicron Electronics GmbH. CMS 356 Voltage and Current Amplifier; Omicron Electronics GmbH: Klaus, Austria, 2023. [Google Scholar]
- Aim-TTi (Aim and Thurlby Thandar Instruments). QPX Series Power Supply Datasheet. 2018. Available online: https://www.aimtti.com/product-category/dc-power-supplies/aim-qpxseries (accessed on 14 May 2025).
- Diodes Incorporated GBJ3510-35A Glass Passivated Bridge Rectifier Datasheet. Product Number: GBJ3510. 2015. Available online: https://www.smc-diodes.com/propdf/GBJ35005-GBJ3510%20N1805%20REV.A.pdf (accessed on 14 May 2025).
- Texas Instruments NE5532, SA5532 Dual Low-Noise Operational Amplifiers Datasheet. Document No. SBOS137D. 2015. Available online: https://www.ti.com/lit/ds/symlink/ne5532.pdf (accessed on 14 May 2025).
- LEM International SA CASR Series Current Transducers Datasheet. CASR Series. 2017. Available online: https://www.lem.com/sites/default/files/products_datasheets/casr_series.pdf (accessed on 14 May 2025).
- Altium Limited. Electronic Design Automation (EDA) Software for PCB Design; Altium Designer; Altium Limited: San Diego, CA, USA, 2024. [Google Scholar]
- IPC-2221; Generic Standard on Printed Board Design. Technical Report IPC-2221; IPC—Association Connecting Electronics Industries: Bannockburn, IL, USA, 2003; Supersedes IPC-D-275.
- IPC-2251; Design Guide for Display and Interface Portability of Electronic Design. Technical Report IPC-2251; IPC—Association Connecting Electronics Industries: Bannockburn, IL, USA, 2003; Supplementary to IPC-2221 series.
- IPC-2152; Standard for Determining Current-Carrying Capacity in Printed Board Design. Technical Report IPC-2152; IPC—Association Connecting Electronics Industries: Bannockburn, IL, USA, 2009; Replaces IPC-2221 internal trace current guidelines.
- IPC-2141; Design Guide for High-Speed Controlled Impedance Circuit Boards. Technical Report IPC-2141; IPC—Association Connecting Electronics Industries: Bannockburn, IL, USA, 1996; Predecessor to IPC-2152 for impedance-related current carrying.
- GB/T 19077-2016; Particle Size Analysis—Laser Diffraction Methods. Chinese National Standard: Beijing, China, 2016.
- Kocsis, B.; Windisch, M.; Mészáros, I.; Károly Varga, L. 3D printing parameters optimization for Fe-6.5 wt%Si. J. Magn. Magn. Mater. 2024, 592, 171829. [Google Scholar] [CrossRef]
- Kuczmann, M. Fourier transform and controlling of flux in scalar hysteresis measurement. Phys. B Condens. Matter 2008, 403, 410–413. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Max. output voltage | 17 |
| Max. output current | 10 A |
| Frequency range | 0–10 kHz |
| Parameter | Value |
|---|---|
| Input voltage | 230 VAC |
| Power | 160 VA |
| Output voltage | 2 × 12 VAC |
| Output current | 2 × 6.67 A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Csizmadia, M.; Horváth, T.; Orosz, T. Development of Magnetic Hysteresis Loop Measurement System for Characterization of 3D-Printed Magnetic Cores. Electronics 2025, 14, 2235. https://doi.org/10.3390/electronics14112235
Csizmadia M, Horváth T, Orosz T. Development of Magnetic Hysteresis Loop Measurement System for Characterization of 3D-Printed Magnetic Cores. Electronics. 2025; 14(11):2235. https://doi.org/10.3390/electronics14112235
Chicago/Turabian StyleCsizmadia, Miklós, Tamás Horváth, and Tamás Orosz. 2025. "Development of Magnetic Hysteresis Loop Measurement System for Characterization of 3D-Printed Magnetic Cores" Electronics 14, no. 11: 2235. https://doi.org/10.3390/electronics14112235
APA StyleCsizmadia, M., Horváth, T., & Orosz, T. (2025). Development of Magnetic Hysteresis Loop Measurement System for Characterization of 3D-Printed Magnetic Cores. Electronics, 14(11), 2235. https://doi.org/10.3390/electronics14112235