Abstract
In this paper, an adaptive trajectory tracking control method combining proportional–integral–derivative (PID) control, Radial Basis Function neural network (RBFNN)-based integral sliding mode control (ISMC), and feedforward control, i.e., the PIDFF-ISMC method, is proposed. The PIDFF-ISMC method aims to deal with the dynamic uncertainties, disturbances, and slow response in lower limb exoskeleton robot systems. Firstly, the Lagrange function is utilized to establish dynamic models that include frictional force and unmodeled dynamics. Secondly, the feedback controller is composed of PID and RBFNN-based ISMC to improve tracking performance and decrease the chattering phenomenon. The feedforward controller is adopted to reduce the response time by employing inverse dynamic models. Finally, the Lyapunov function proves the stability of the proposed control method. The experimental results show that the proposed control method can effectively reduce the trajectory tracking error and response time at two different speeds while alleviating control input chattering.
1. Introduction
As elderly individuals experience a decline in mobility, they become more susceptible to cardiovascular disease, stroke, and paralysis. Lower limb exoskeleton robots, serving as intelligent devices for assistance, have found widespread application in providing auxiliary force and facilitating rehabilitation training. Nevertheless, the lower limb exoskeleton robot, being a nonlinear and uncertain system, encounters challenges such as instability, inaccuracy, and sluggish response in trajectory tracking performance [1,2,3].
Numerous researchers have proposed control methods to enhance robustness and response within the context of nonlinear and uncertain systems [4]. Position feedback proportional–integral–derivative (PID) control is a common and straightforward approach for trajectory tracking [5,6]. The LOPES lower limb rehabilitation robot, for instance, utilizes PID control for trajectory tracking. However, PID control faces challenges in balancing the requirements of tracking accuracy and system stability within nonlinear systems. In pursuit of superior control effects, researchers have introduced advanced control strategies such as adaptive control [7,8], fuzzy control [9,10], intelligent optimization algorithms [11], model predictive control [12,13] and sliding mode control (SMC) [14,15,16]. Among these, SMC offers advantages such as strong robustness, broad applicability, precise control, and simple implementation. Due to the benefits, SMC stands out as an effective robust control method that is extensively applied in nonlinear and uncertain systems lacking an accurate dynamic model [17,18]. Trajectory tracking control using SMC is effective for lower limb exoskeleton robots, which are typical nonlinear systems; while the SMC is highly effective in nonlinear and complex exoskeleton robot systems, it still faces challenges such as the need for knowledge of unknown functions or the robot’s dynamic model and control signal chattering [19]. First, the performance of SMC can deteriorate because of the difficulty in calculating the equivalent control law due to the uncertainty. To address these issues, the SMC method has been developed using a neural network to approximate the unknown part of dynamics for control design [9,20]. Research has focused on leveraging Radial Basis Function (RBF) neural networks, which can approximate arbitrary nonlinearity and exhibit quick convergence, beneficial in real-time or time-sensitive tasks. In [21], a fuzzy and RBF neural network-based SMC method was proposed for controlling a robot’s manipulator in the absence of an accurate dynamic model. Given these advantages, RBF neural networks are highly suitable for lower limb exoskeleton robot control systems. Second, for the chattering phenomenon in the robot system [22], researchers have focused on neural networks [19], fuzzy logic [21], switching functions [23], fast terminal sliding mode control [24], and integral sliding mode control (ISMC) [25]. By introducing an integral term, ISMC can eliminate residual errors, improve system stability, suppress high-frequency oscillations, and enhance system robustness [26]. This effectively reduces the possibility of system chattering, improving control system performance and stability. The integration of ISMC and RBF neural networks is well-suited for the trajectory tracking control design of lower limb exoskeleton robots in our paper.
For exoskeleton systems, in addition to addressing the aforementioned issues, it is also necessary to reduce response time to provide a better user experience for the wearer. Feedforward control, as a widely used control method, can effectively enhance the response of the system. The feedforward control relies on a precise dynamic model that is difficult to obtain in the lower limb exoskeleton system, making it important to combine it with model-free control methods to enhance its capabilities. Consequently, several studies combine feedforward control with model-free control methods to improve response. In [27], a feedforward control combined with a PID feedback control method is introduced to achieve rapid convergence for industrial robots. In [28], an optimal ISM control with feedforward compensation is proposed to mitigate external disturbances. However, this method is specifically applied to an offshore steel jacket-type platform system. Therefore, combining the model-free RBFNN-based ISMC and feedforward control method in the lower limb exoskeleton robot system is crucial for achieving accurate trajectory tracking and rapid response while reducing chattering in trajectory tracking control.
In this paper, a novel trajectory tracking PIDFF-ISMC method is proposed to solve the above problems. The contributions of this article are summarized as follows:
- A novel PIDFF-ISMC control method is proposed by effectively integrating the RBF neural network-based ISMC feedforward control with the feedforward control. This binary control architecture of “feedforward + feedback” is implemented to enhance the trajectory tracking performance in the system.
- We introduce the RBF neural network to approximate the integral sliding mode term encompassing the uncertainty in the exoskeleton robot system, which is difficult to calculate in the ISMC method. Meanwhile, we adopt the ISMC instead of traditional SMC and utilize the saturation function instead of the traditional sign function, ultimately achieving the reduced trajectory tracking error and mitigated control chattering.
- We establish the feedforward control based on the inverse dynamic model, integrating it with the model-free RBF neural network-based ISMC, thereby reducing the response time of the exoskeleton robot system.
The remainder of the article is organized as follows: Section 2 presents lower limb exoskeleton robot and its nonlinear dynamic model. Section 3 proposes the trajectory tracking PIDFF-ISMC method and provides the stability analysis. Then, Section 4 presents the experimental results of the proposed control method at different speeds.
2. Exoskeleton Robot System Components
2.1. Exoskeleton Robot Structural Components
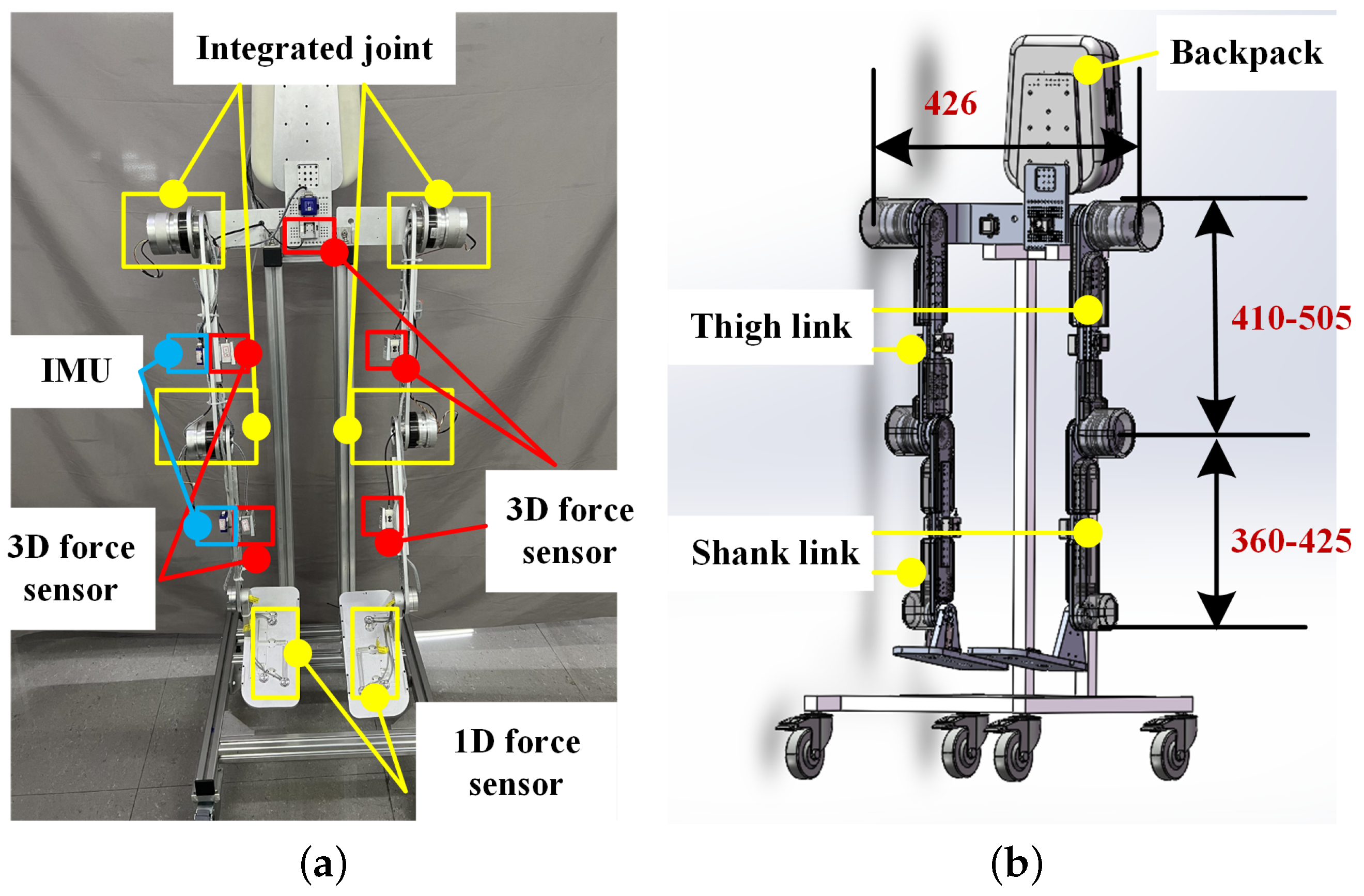
The configuration of the lower limb exoskeleton is depicted in Figure 1. It includes a mobile platform, six links, a backpack, six joints, five adjustment mechanisms, and some sensors.
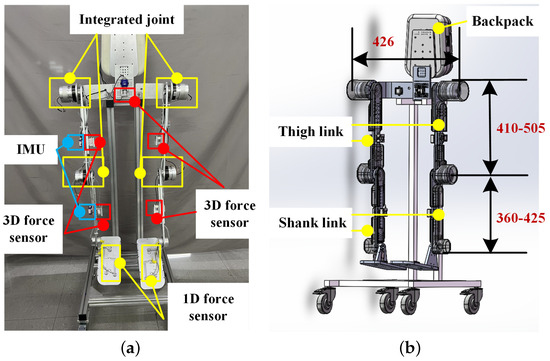
Figure 1.
Exoskeleton (a) and mechanical diagram in SolidWorks (mm) (b).
The mobile platform is utilized to move the exoskeleton when necessary. The exoskeleton consists of six links comprising two thigh links, two shank links, and two waist links. To reduce exoskeleton weight and enhance mechanical strength, most components of the exoskeleton robot employ 6061 aluminum alloy. Simultaneously, to accommodate individuals of varying heights, the adjustment mechanisms, located on the links, are used to be suitable for different wearers. The backpack is designed to hold the power supply and some cables.
The hip and knee joints serve as active joints, and the flexion–extension movements are designated as active degrees of freedom (DoF) for the hip and knee joints, respectively. The four mentioned joints serve to output control torque and also to connect the thigh link with the shank link, as well as the thigh link with the waist link. We selected an integrated joint (CRA-RI60), which integrates the motor, gearbox, encoder, and torque sensor. The two ankle joints are configured as two passive joints without the motor. They are only utilized to connect the shank link and foot shone.
In addition to the encoders in the above-mentioned integrated joints, the sensing system of the exoskeleton also includes five three-dimensional (3D) force sensors (H3D40), six single-dimensional (1D) force sensors (Model-1021), and six inertial measurement unit (IMU) sensors (LPMS-CU). The interactions between humans and the exoskeleton system forces are captured by 3D force sensors positioned on the thigh and shank links, while the interactions between the ground and the exoskeleton system forces are obtained by 1D force sensors positioned on the foot. The positional information is acquired from IMU sensors located on the thigh, shank, and waist links. The data collected from these sensors are employed for subsequent research on control and intention recognition.
2.2. Exoskeleton Robot Dynamic Model
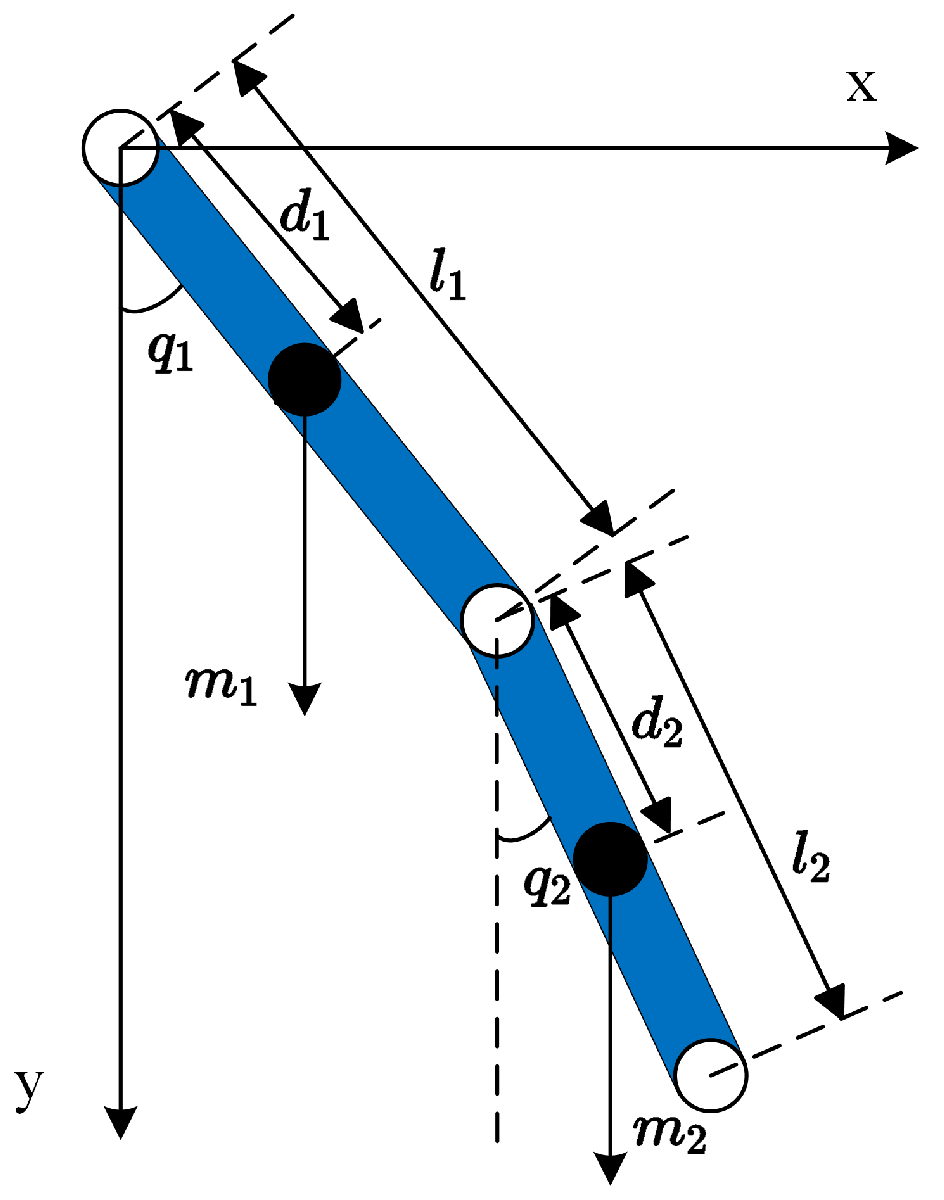
The human motion phase can be divided into the standing phase, primarily responsible for providing support and requiring larger torque, and the swing phase, which focuses on trajectory tracing. Therefore, research on trajectory tracking in lower limb exoskeleton robots can initially concentrate on studying the trajectory of the single swing leg. Considering that the ankle joint is a passive joint, for ease of analysis, it is simplified by incorporating it as a load into the shank linkage, reducing the single-leg model of the lower limb exoskeleton robot to a two-joint robotic system in Figure 2. The nonlinear dynamic equation of the lower limb exoskeleton robot is designed as follows:
where is the mass matrix, is the Coriolis force and centrifugal force matrix on the bar, is a gravity matrix, is a vector of frictional force and unmodeled dynamic, is the joint position vector, is the joint velocity vector, and is the joint acceleration vector.
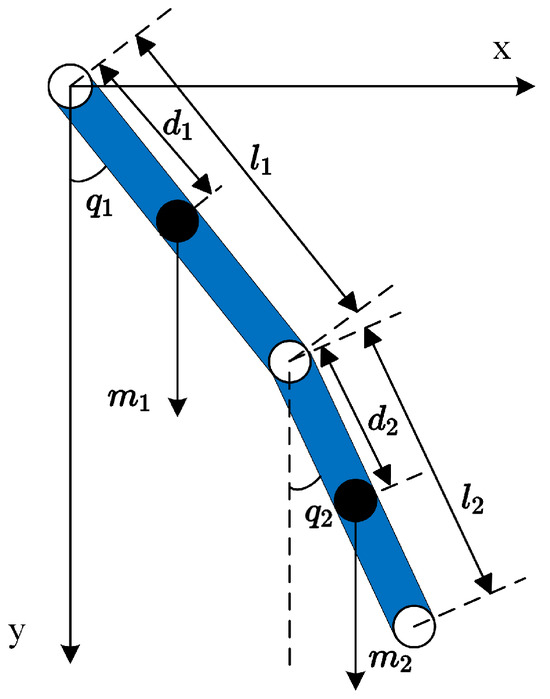
Figure 2.
Simplified model of the exoskeleton (single lower limb).
There are different methods to obtain the dynamic model of the lower limb exoskeleton, such as the Newton–Euler method, the Kane method, and the Lagrange method. The Lagrange method only requires consideration of the system’s kinetic and potential energies, making the construction process simpler. The Lagrange equation is defined as follows:
where is the kinetic energy and is the potential energy of the lower limb exoskeleton robot system. This leads to the following formula:
The Lagrange method is used to establish the dynamic model, we obtain
where and are the weight of thigh link and shank link, and are the length of thigh link and shank link, and are the moments of inertia for the thigh link and shank link, and and are the distances from the center of mass of the thigh and shank linkages to the hip and knee joints, respectively, where .
There are three properties of the exoskeleton system.
Property 1.
The matrix can be chosen so that is skew-symmetric, so we can obtain
Property 2.
There exist , such that
Property 3.
The matrix is symmetric and uniformly positive, and and are known positive constants such that
3. Trajectory Tracking Control Method
In this section, we propose an adaptive trajectory tracking method that integrates a PID, feedforward, and RBF neural network-based sliding mode control method to reduce the tracking error, control chattering, and response time. Subsequently, a Lyapunov function is introduced to ascertain the system’s stability.
Feedforward control offers preemptive compensation in the face of uncertainties within the robotic system before any changes occur. In this study, we employ the feedforward control method to enhance the response of the lower limb exoskeleton system. Leveraging the dynamic models established in Section 2, the feedforward control law is defined.
where is the mass matrix with ideal joint position, is the Coriolis force and centrifugal force matrix on the bar with ideal joint position, is a gravity matrix with an ideal joint position, is the ideal joint position vector, is the ideal joint velocity vector, and is the ideal joint acceleration vector.
The lower limb exoskeleton robot is designed to assist human walking. To ensure the safety and comfort of the wearer, there are limits on parameters such as angles, velocities, and accelerations. Thus, there exist , , , , , and .
From Properties 2–3, there exist and and we obtain
From Properties 2–3 and Formula (12), we obtain
The SMC method proves effective in enhancing the robustness of nonlinear and uncertain systems. Additionally, it demonstrates insensitivity to disturbances, enhancing the system’s robustness against external perturbations. Moreover, it achieves asymptotic stability of the system.
In comparison to the traditional SMC method, the ISMC method is adept at minimizing oscillations and strengthening robustness. In this study, we employ ISMC to mitigate the impact of uncertainties and disturbances in the lower limb exoskeleton robot system.
The integral sliding mode surface function is defined as
where , , and e is the trajectory tracking error, .
Then, we obtain
From Formula (14), the PID control law can be defined as follows
where , , .
Combining the sliding surface function and the mass matrix D, we obtain
where . , f can be defined as the sliding control law, we obtain
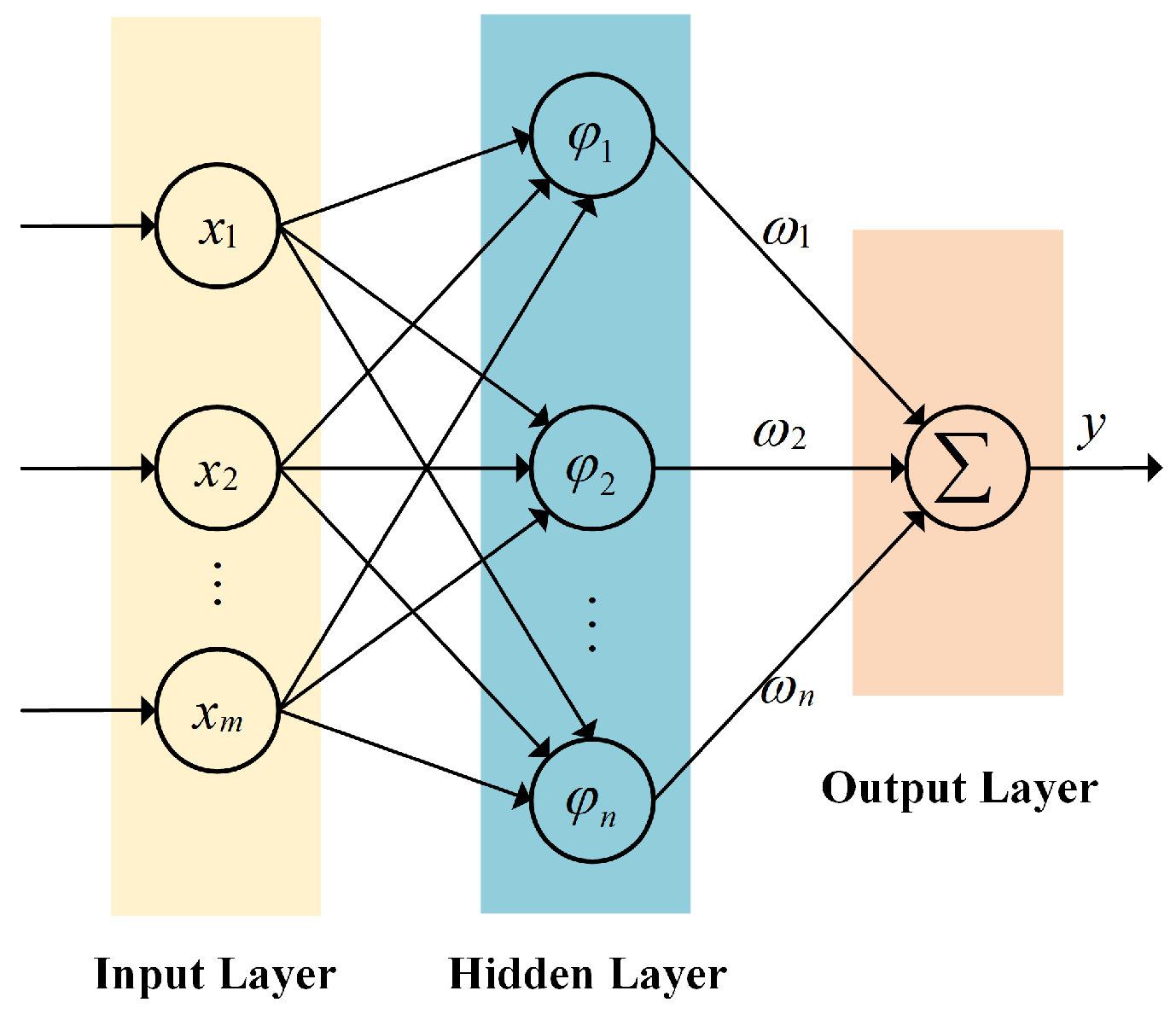
The RBF neural network is a three-layer feedforward network featuring a single hidden layer capable of approximating continuous functions with arbitrary precision. In contrast to traditional backpropagation (BP) neural networks, the RBF neural network exhibits a simpler structure, faster learning and approximation speed, and a reduced tendency to fall into local optima. The structure of the RBF neural network is shown in Figure 3, where is the input, is the desired ideal weight of the network, is the intermediate function, and is the output.
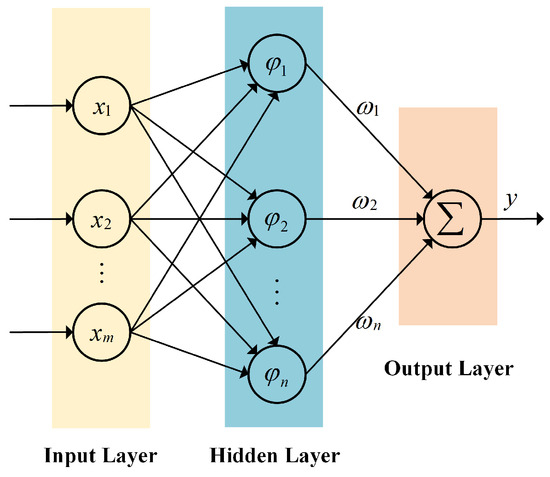
Figure 3.
Structure of RBF neural network.
The parameter d in the Formula (18) is uncertain due to disturbances and unmodeled dynamics, and other parameters may also have uncertain errors due to friction, assembly errors, and other reasons. Thus, the RBF neural network is adopted to approach .
The Gaussian kernel function, a type of radial basis function, is widely employed as an activation function in RBF neural networks. When the variance b, the centroid , and the weights from the hidden layer to the output layer are obtained, we can effectively learn a complex function composed of weighted Gaussian basis functions. Thus, the Gaussian kernel function is designed as
where is the input of the RBF neural network.
The ideal output of the RBF neural network is shown as
where , is the error of the RBF neural network.
In the real lower limb exoskeleton robot system, what we can obtain is the estimated value
where is the estimate of f, and is the estimate of .
Then, we design the error between the ideal and estimate the weight of the network, and is designed as
Combining the Formulas (11), (16) and (21), the control law of the lower limb exoskeleton robot can be designed as
where the variable v is utilized to mitigate the effects of the approximated error . The robust item is engineered to
where , .
To mitigate the occurrence of oscillations in traditional SMC, we adopt the continuous function that is designed as
where .
To adjust the estimated weight parameters , the adaptive law is designed as
where .
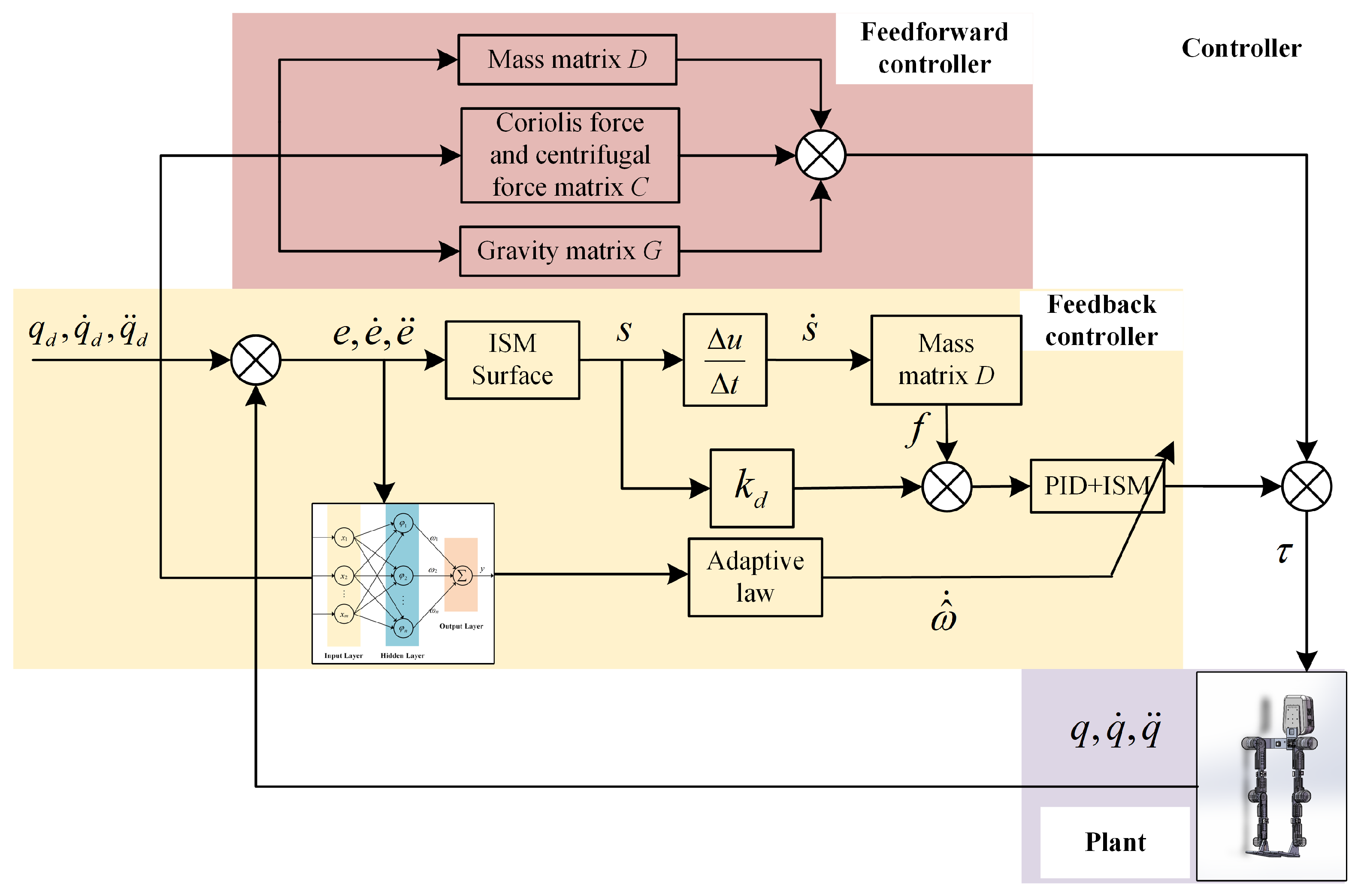
Thus, the block diagram of the proposed controller is shown in Figure 4.
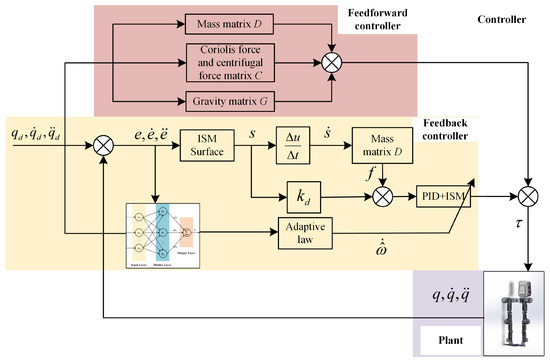
Figure 4.
The block diagram of the proposed controller.
The Lyapunov function is designed as
Taking the derivative of both sides of Formula (27), we obtain
Further, from Property 1, we obtain ; from Formulas (20)–(22), we obtain . Then, we obtain
Using the weight adjustment adaptive law of the RBF neural network from Formula (26), we obtain
Additionally, and meet the following formulas.
By utilizing the Cauchy–Schwarz inequality, it can be derived as . Combining Formulas (24), (29)–(31) and above, we can obtain that
where
It can be concluded from Formula (27) that L is positive definite and regular. It can be concluded from Formula (32) that is negative definite. Therefore, it can be verified the system is asymptotically stable.
4. Experimental Results
4.1. Experimental Platform
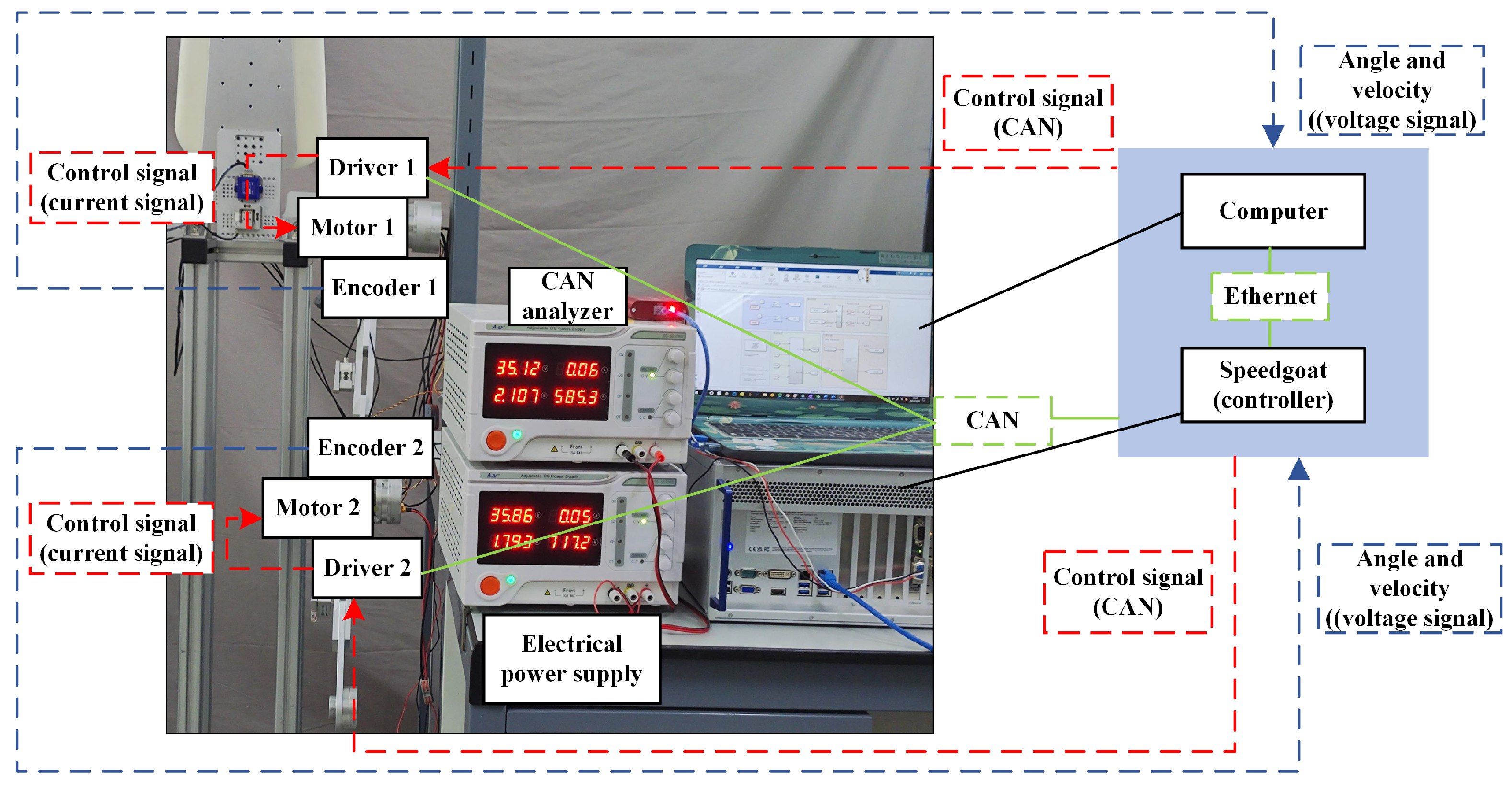
Experiments were conducted to demonstrate the functionality of the system. The experiment platform is shown in Figure 5. The speedgoat serves as the controller of the experimental system, facilitating real-time communication between the computer and integrated joints. The speedgoat transmits movement data to the computer via Ethernet, receiving processed control signals from the computer. The control commands are communicated to the motor through the Controller Area Network (CAN) Fieldbus, and movement data are read from the encoders. Encoder1 and encoder2 are used to obtain the movement data of the hip joint and knee joint, respectively, and the acquired data are provided for the controller as the feedback message. CANaylst is used to adjust the basic setting message of the motors via CAN Fieldbus.
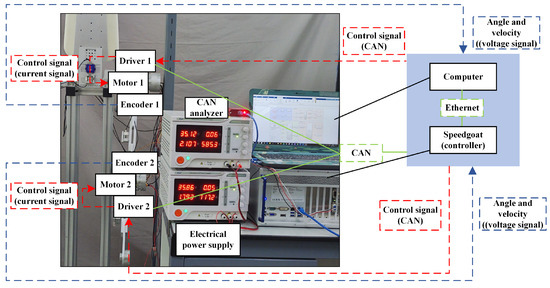
Figure 5.
Experiment platform of the exoskeleton.
4.2. Experimental Results of Trajectory Tracking
To validate the effectiveness of the proposed method in trajectory tracking, the experiment compares the trajectory tracking performance of PID, PIDFF, and the proposed method under the different planned trajectories. T = 2 s is used to simulate the walking speed of a typical individual, while T = 5 s is utilized to emulate the slower walking speed characteristic of elderly individuals. Experimental results of trajectory tracking m = [3.28; 1.16], I = [0.07; 0.01], l = [0.5025; 0.4224]. Some fundamental parameters of the RBFNN remain unchanged are shown below: = [−1, −0.5, 0, 0.5, 1], = [0.05; 0.05].
When T = 2 s, the parameters of the PID and PIDFF control method in the experiment are shown below: = [40,0; 20,0], = [40,0; 20,0], = [20,0; 10,0]. The values of m, I, and l are shown above. The parameters of the proposed control method in the experiment are shown below: = [20,0; 10,0], = [2,0; 0,2], = [2,0; 0,2], = 500, b = 8.
The parameters of the PID and PIDFF control method in the experiment when T = 5 s are shown below: = [560,0; 70,0], = [560,0; 70,0], = [570,0; 70,0]. The parameters of the proposed control method in the experiment when T = 5 s are shown below: = [70,0; 70,0], = [8,0; 0,1], = [8,0; 0,1], = 600, b = 5.
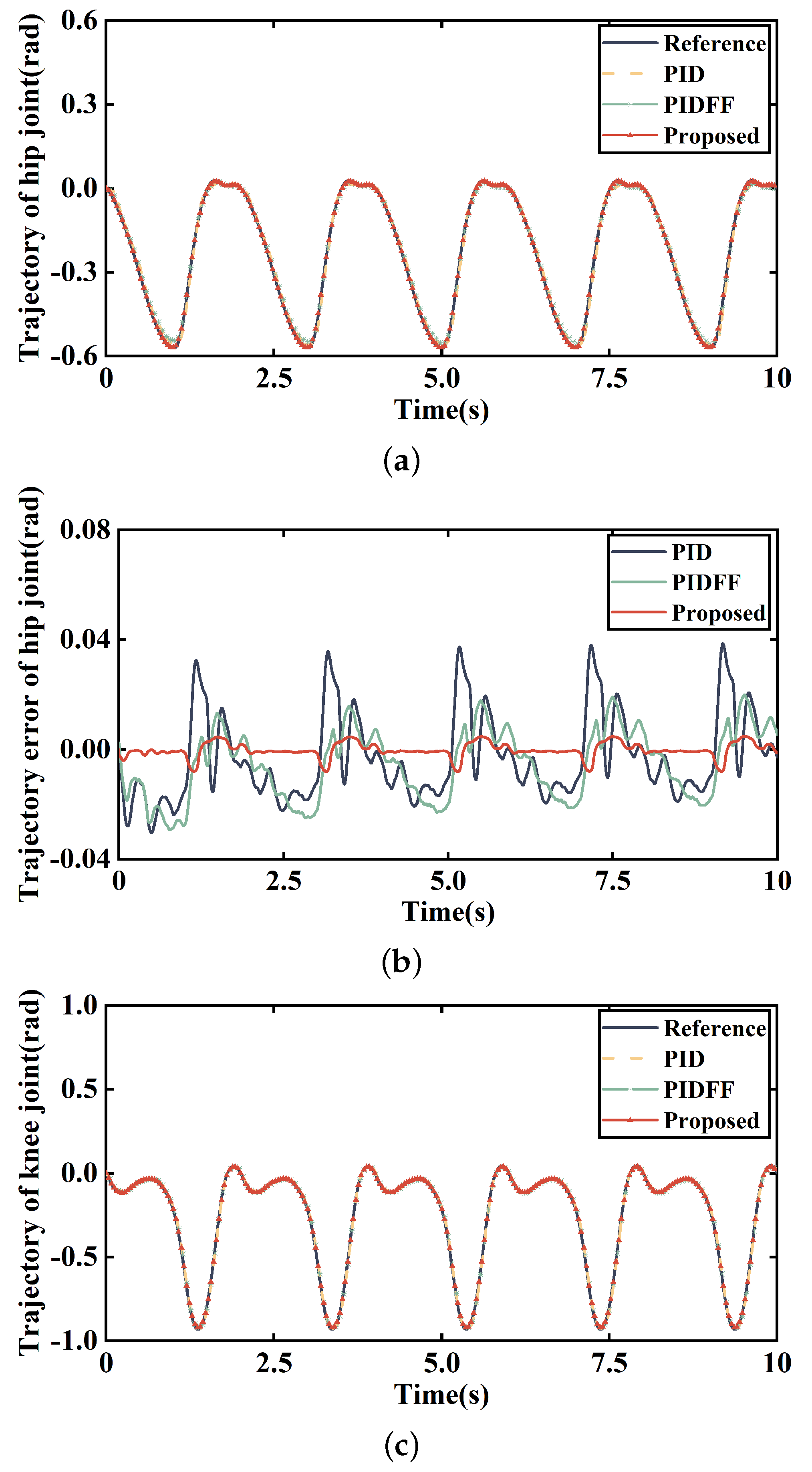
In the first case, the trajectory tracking performance and error of PID, PIDFF, and the proposed PIDFF-ISMC methods are shown in Figure 6. The tracking performance of the hip joint and knee joint is represented by the mean absolute error (MAE), max absolute error (MAXE), and root-mean-squared error (RMSE). The detailed statistics are listed in Table 1. The feedback controller component which combines the integral sliding mode function-based PID and the RBF-based ISM control significantly improves trajectory tracking effectiveness. The experimental results indicate a significant improvement in trajectory tracking performance with the proposed method at normal walking speed, i.e., T = 2 s.
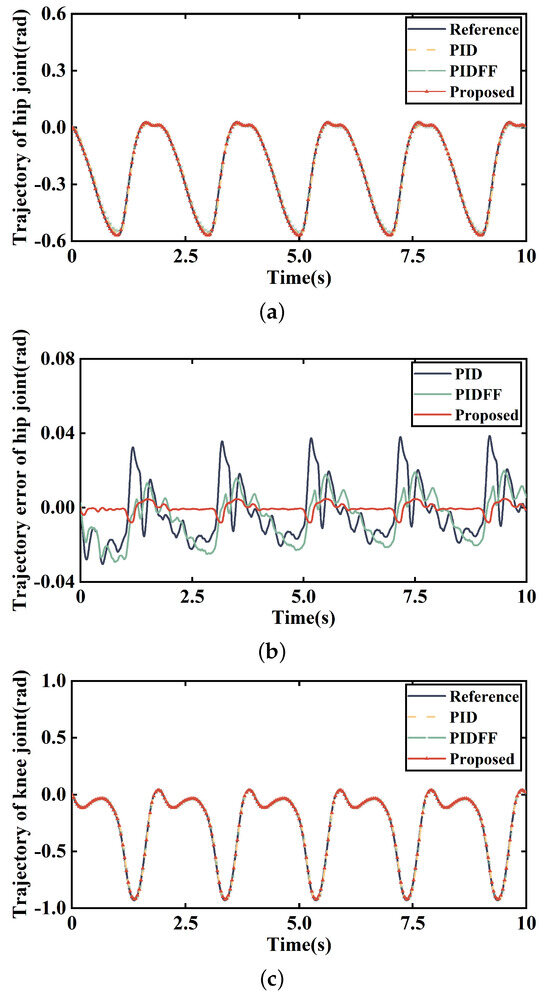
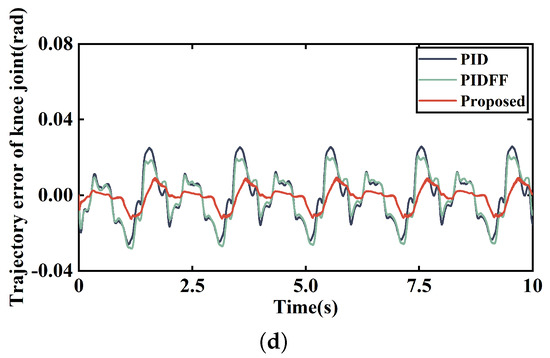
Figure 6.
Experimental results of hip joint and knee joint with PID, PIDFF, and proposed controller when T = 2 s. (a) Trajectory tracking of hip joint; (b) Trajectory tracking error of hip joint; (c) Trajectory tracking of knee joint; (d) Trajectory tracking error of knee joint.

Table 1.
Trajectory tracking error of different control methods (T = 2 s).
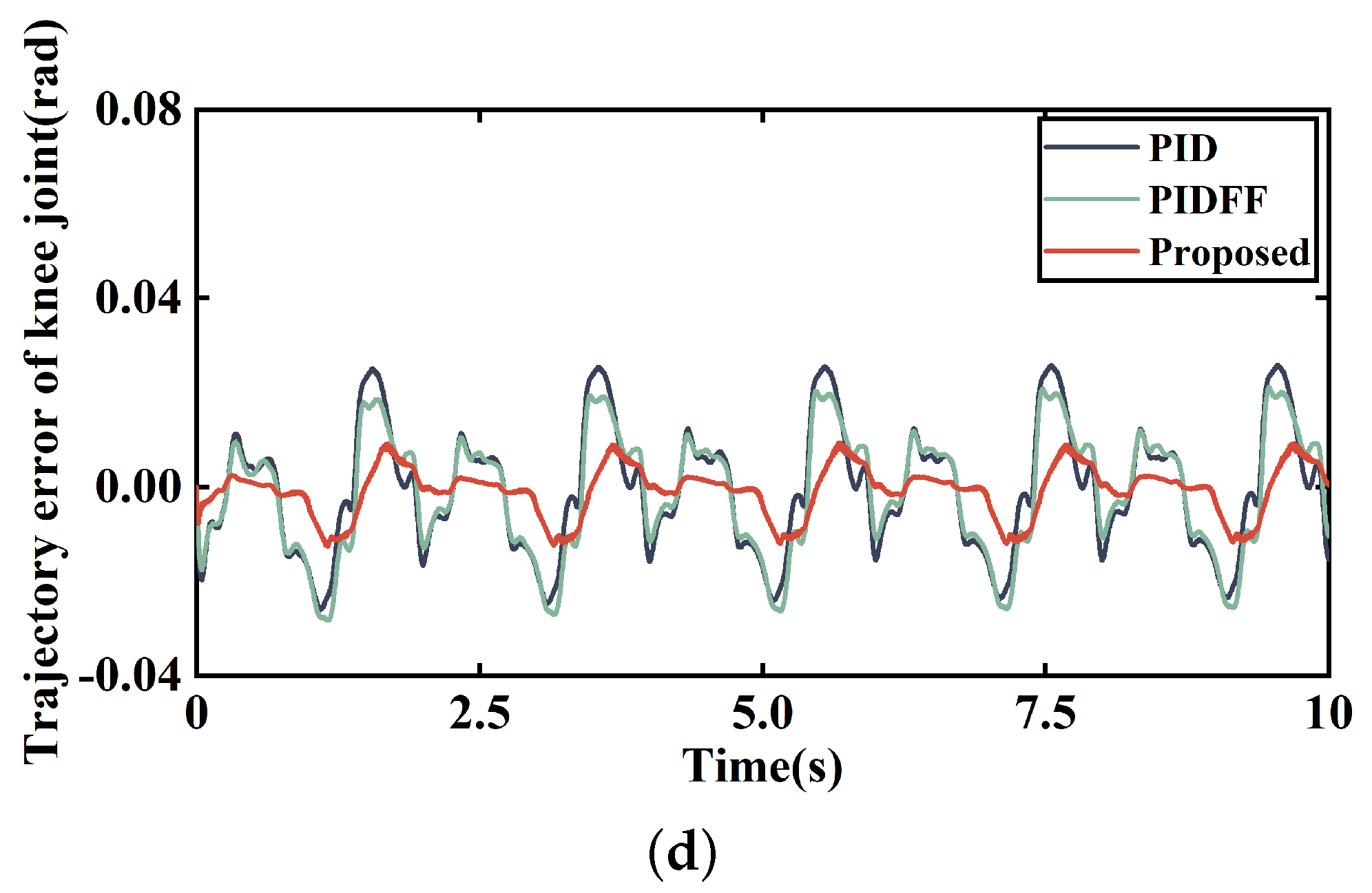
In the second case, Figure 7. shows the trajectory tracking performance and error of the hip joint and knee joint when T = 5 s. Table 2 shows the detailed statistics of the MAE, MAXE, and RMSE of the trajectory tracking experimental results when T = 5 s. The experimental results demonstrate a notable enhancement in trajectory tracking in the exoskeleton robot.
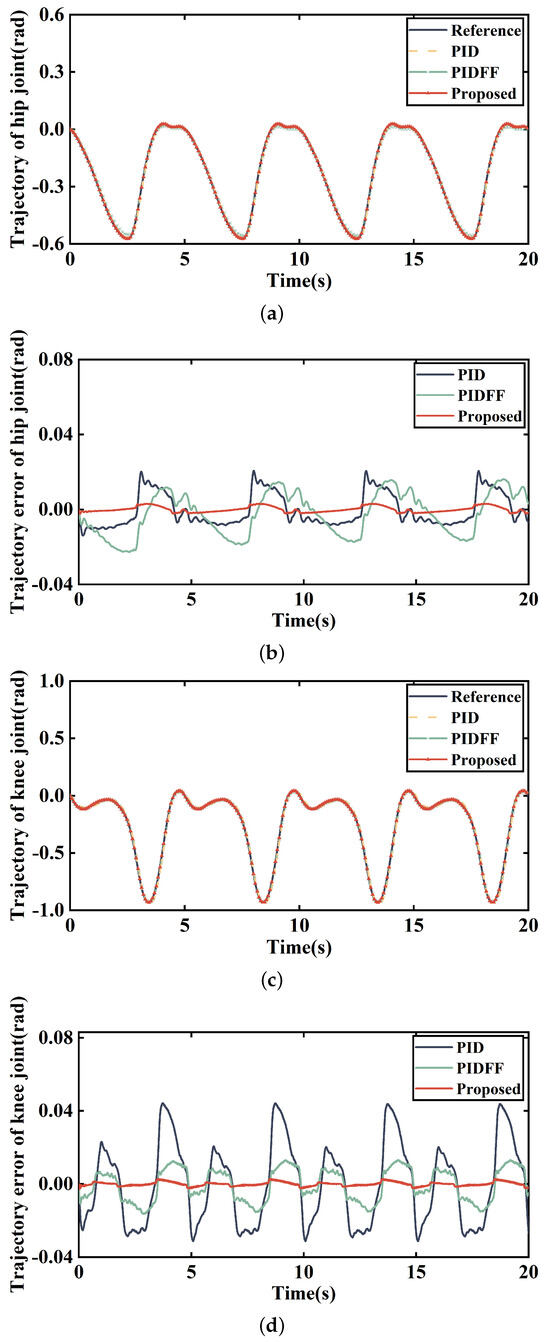
Figure 7.
Experimental results of hip joint and knee joint with PID, PIDFF, and the proposed controller when T = 5 s. (a) Trajectory tracking of hip joint; (b) trajectory tracking error of hip joint; (c) trajectory tracking of knee joint; (d) trajectory tracking error of knee joint.
Table 2.
Trajectory tracking error of different control methods (T = 5 s).
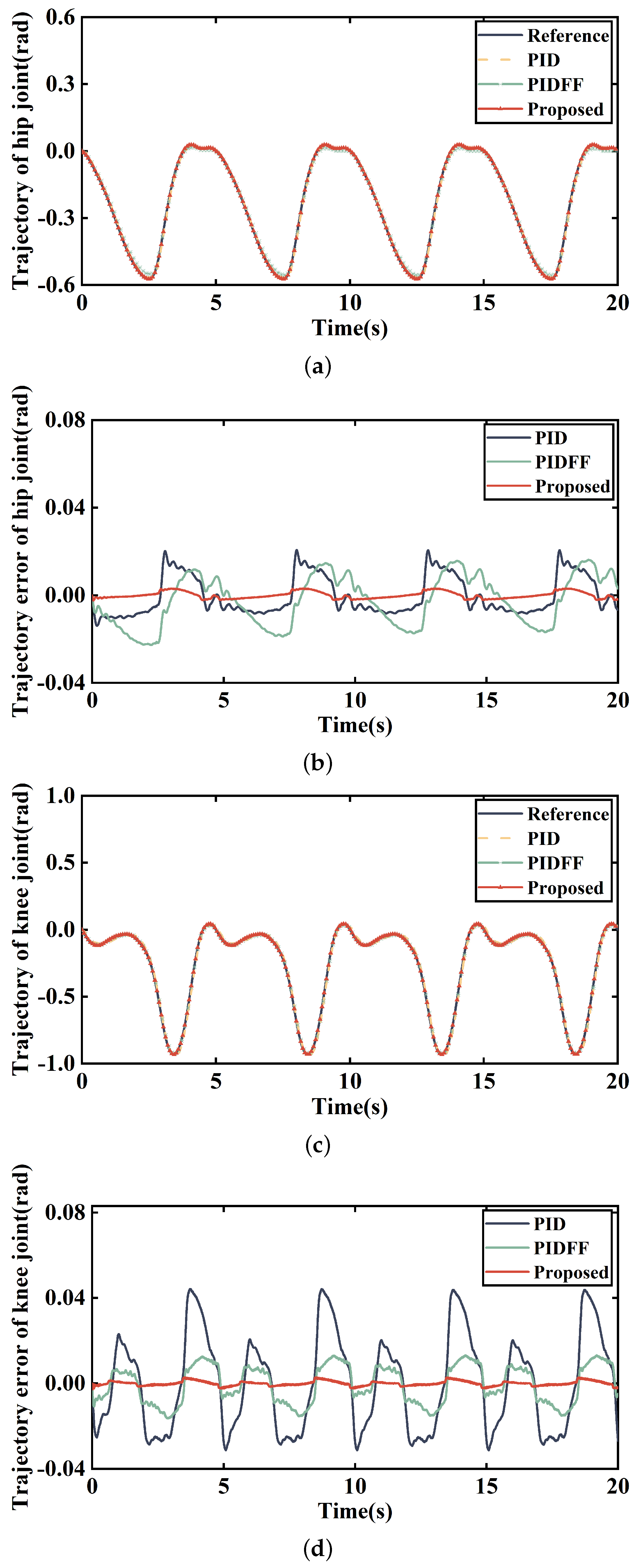
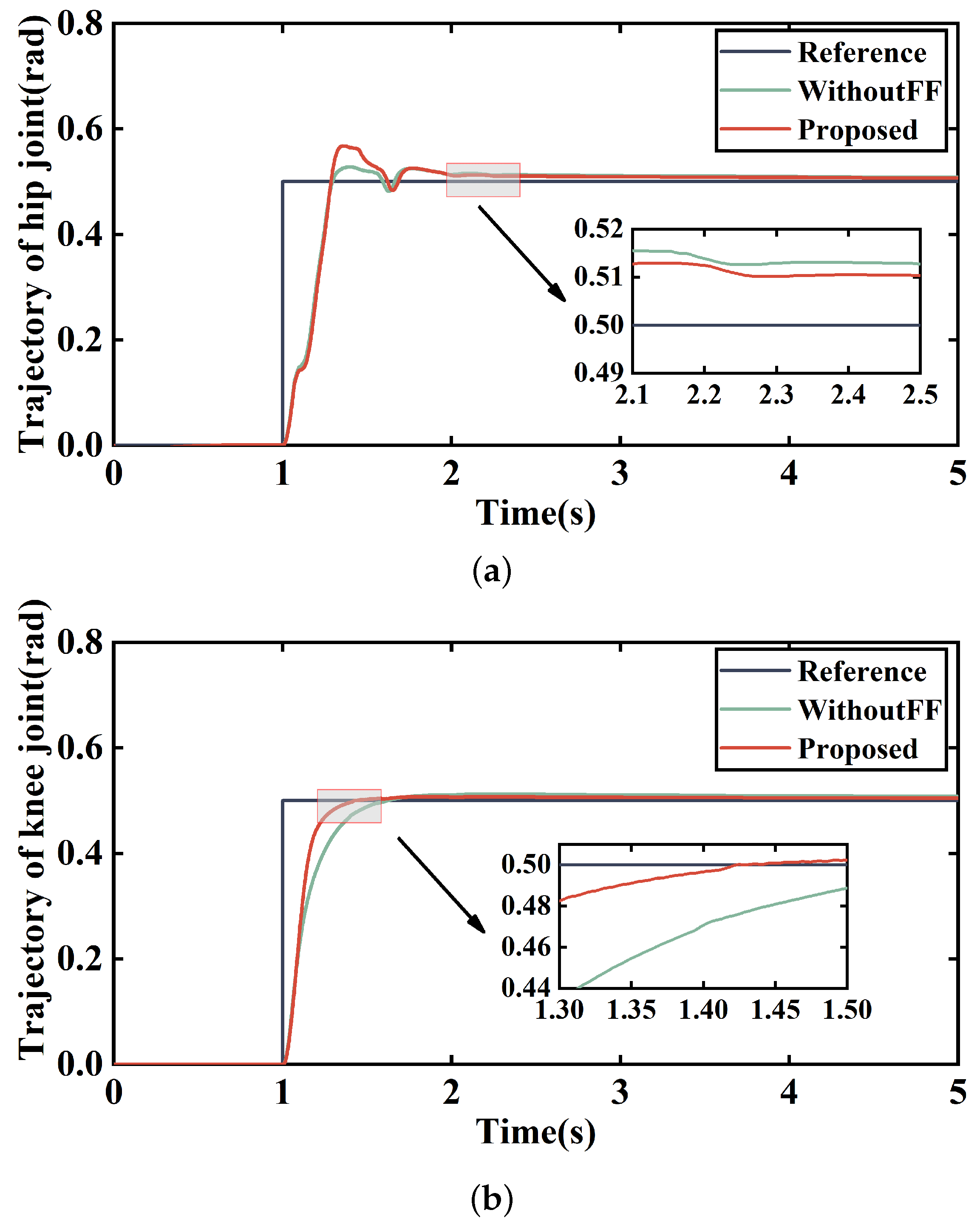
To validate the effectiveness of the proposed method in system response, the experiment compares the tracking response of the proposed method with feedforward control and without feedforward control under the step response condition.
When under the step response experiment, the parameters of the control method with feedforward control and without feedforward control are same, which are shown below: = [70,0; 70,0], = [6,0; 0,1], = [8,0; 0,1], = 600, b = 5.
The tracking performance of the hip joint and knee joint is shown in Figure 8. Leveraging the advantages of feedforward and ISMC for rapid response, when using the proposed method with feedforward, the response time of the hip joint can be reduced from 2.2 s to 1.3 s, while the response time of the knee joint can be reduced from 1.7 s to 0.4 s. It is verified that the proposed control method provides a notable enhancement in system response.
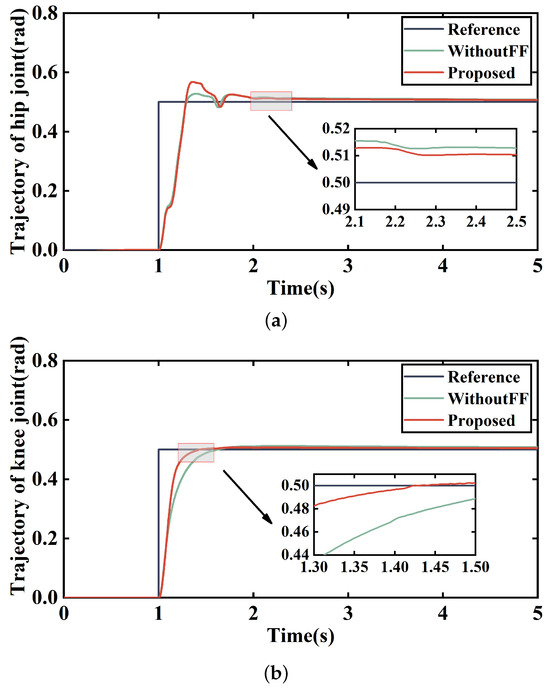
Figure 8.
Experimental results of the hip joint and knee joint with proposed controller and without feed-forward controller when step response. (a) Trajectory tracking of the hip joint; (b) trajectory tracking of the knee joint.
The steady-state errors of the hip joint and the knee joint are 0.032 rad and 0.027 rad when without feedforward control; while using the proposed control method, the steady state errors of the hip joint and the knee joint are 0.033 rad and 0.019 rad.
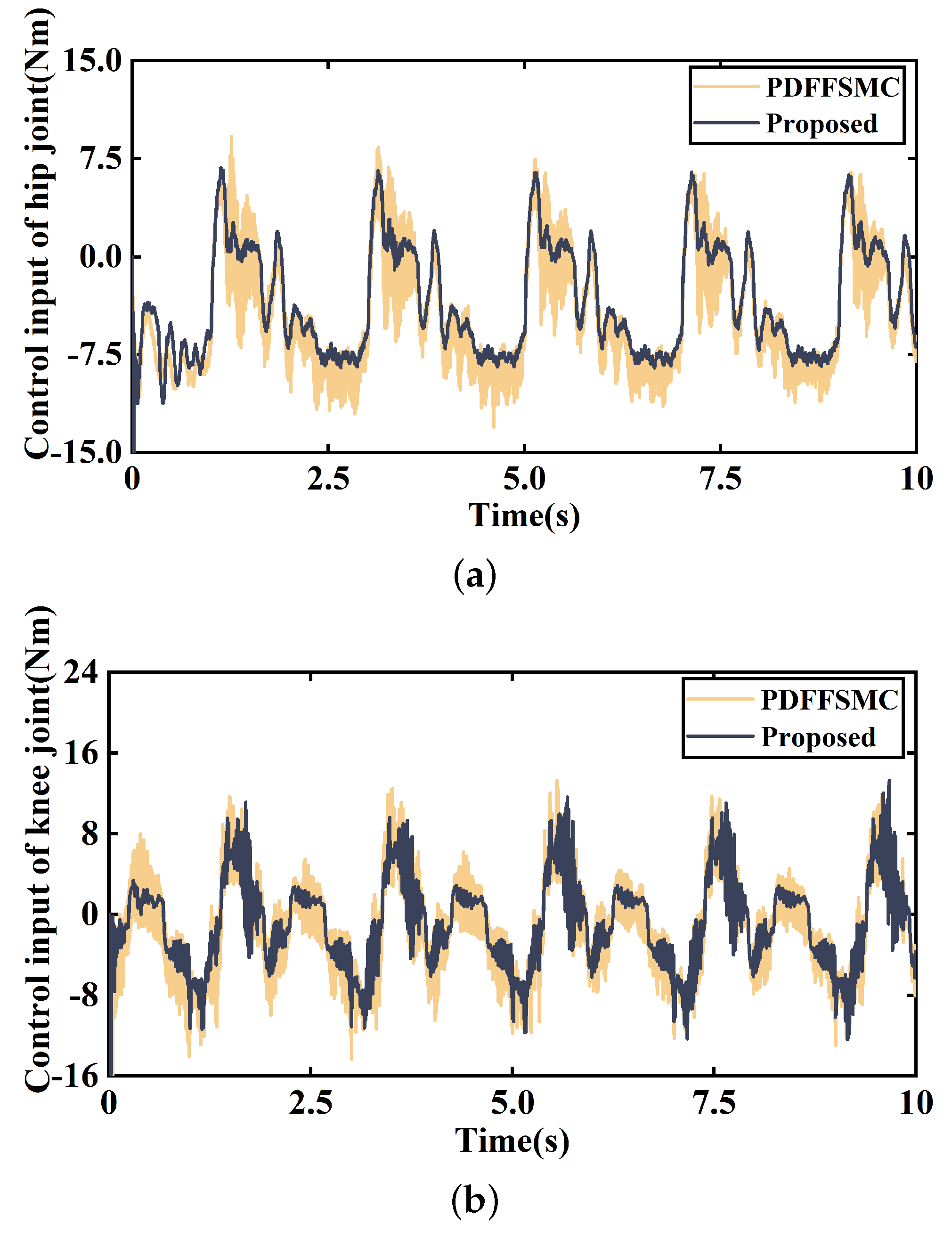
4.3. Experimental Results of Control Input
To validate the effectiveness of the proposed method in reducing chattering, the experiment compares the control input torque of the PDFFSMC method and the proposed PIDFF-ISMC method with the saturation function under the planned trajectory.
When T = 2 s, the parameters of the PDFFSMC method in the experiment are shown below: = [40,0; 20,0], = [20,0; 10,0], , . The parameters of the PDFFSMC method in the experiment when T = 5 s are shown below: = [560,0; 70,0], = [70,0; 70,0], , .
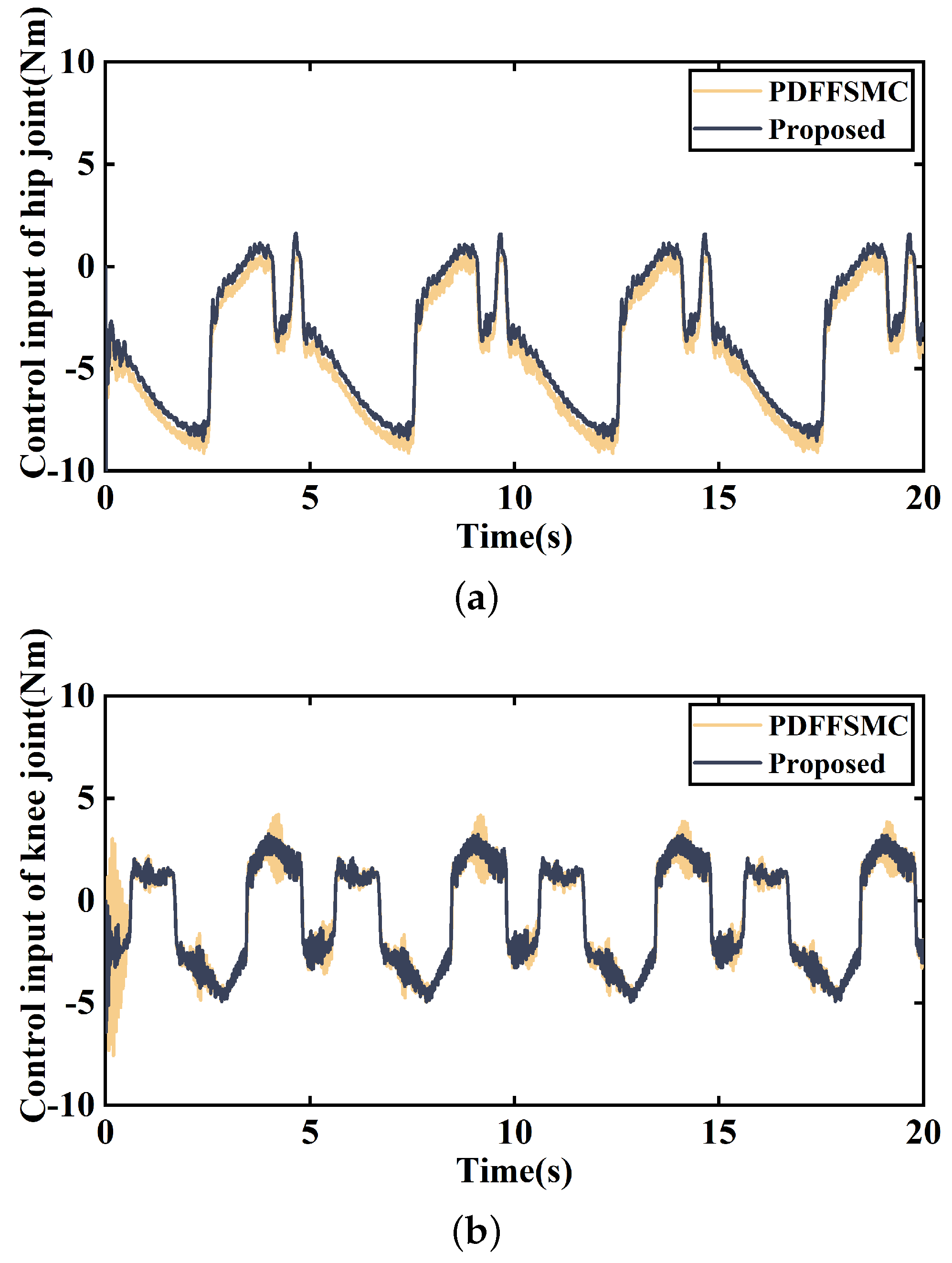
Figure 9 and Figure 10 depict the control input torque for the hip and knee joints when T = 2 s and T = 5 s. It can be seen that the chattering of the control input has been markedly reduced.
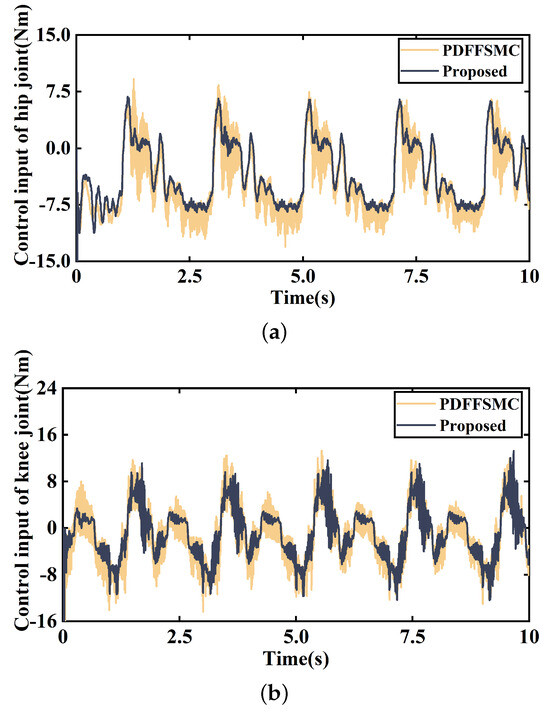
Figure 9.
Experimental results of hip joint and knee joint with PDFFSMC controller and proposed controller when T = 2 s. (a) Control input of hip joint; (b) control input of knee joint.
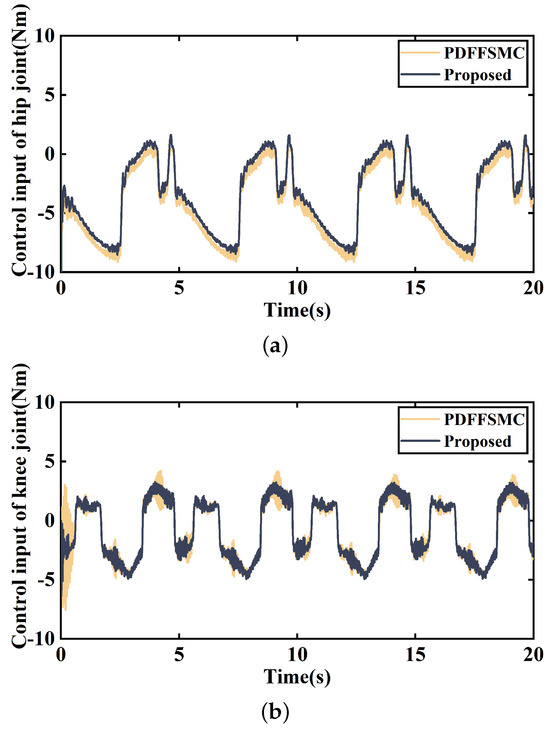
Figure 10.
Experimental results of hip joint and knee joint with PDFFSMC controller and proposed controller when T = 5 s. (a) Control input of hip joint; (b) control input of knee joint.
5. Conclusions
In this paper, a novel adaptive trajectory tracking control method PIDFF-ISMC based on the RBF neural network is proposed for the lower limb exoskeleton robot. The feedforward controller is designed to improve the response speed of the system. The feedback controller is composed of PID control designed on integral sliding mode function and ISMC based on RBF neural network, which is used to reduce the influence of uncertainties and disturbances in trajectory tracking and control input performance. Experimental results show the MAE, MAXE, and RMSE of the proposed control method are significantly reduced that compared with PID and PIDFF control methods. Taking the performance at T = 2 s as an example, the RMSE of the hip joint reduced by 82.7% in PID and by 80% in PIDFF. The RMSE of the knee joint is reduced by 59.2% in PID and by 58.6% in PIDFF. Furthermore, the PIDFF-ISMC method significantly reduces the response time of the hip joint and knee joint to 1.3 s and 0.4 s. In addition, the PIDFF-ISM control method reduces the chattering of the control input torque. The above results show the proposed PIDFF-ISM control method can reduce the error of trajectory tracking and improve the robustness and response of the lower limb exoskeleton robot system.
In future work, we will conduct experiments in various application scenarios to verify the robustness of the system. Additionally, we will further utilize the ground–robot interaction force in the dynamic models to research the control of the exoskeleton robot.
Author Contributions
Conceptualization, T.Y. and C.Z.; methodology, T.Y.; software, T.Y.; validation, T.Y., C.Z. and F.Y.; formal analysis, T.Y.; investigation, P.L. and M.Z.; resources, S.L.; data curation, T.Y.; writing—original draft preparation, T.Y.; writing—review and editing, T.Y.; visualization, T.Y.; supervision, C.Z. and F.Y.; project administration, C.Z.; funding acquisition, C.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported in part by the National Natural Science Foundation of China under Grant U21A20121 and Grant U20A20282, and Grant 92048201, in part by Ningbo Major Scientific and Technological Project under Grant 2022Z066, and in part by the National Science Foundation for Young Scientists of China under Grant 52107062.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Meijneke, C.; van Oort, G.; Sluiter, V.; van Asseldonk, E.; Tagliamonte, N.L.; Tamburella, F.; Pisotta, I.; Masciullo, M.; Arquilla, M.; Molinari, M.; et al. Symbitron Exoskeleton: Design, Control, and Evaluation of a Modular Exoskeleton for Incomplete and Complete Spinal Cord Injured Individuals. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 330–339. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Huang, J.; Cao, Y.; Xiong, C.H.; Mohammed, S. Echo State Network-Enhanced Super-Twisting Control of Passive Gait Training Exoskeleton Driven by Pneumatic Muscles. IEEE/ASME Trans. Mechatron. 2022, 27, 5107–5118. [Google Scholar] [CrossRef]
- Abbasimoshaei, A.; Chinnakkonda Ravi, A.K.; Kern, T.A. Development of a New Control System for a Rehabilitation Robot Using Electrical Impedance Tomography and Artificial Intelligence. Biomimetics 2023, 8, 420. [Google Scholar] [CrossRef] [PubMed]
- Rubio, J.d.J.; Hernandez, M.A.; Rosas, F.J.; Orozco, E.; Balcazar, R.; Pacheco, J. Genetic high-gain controller to improve the position perturbation attenuation and compact high-gain controller to improve the velocity perturbation attenuation in inverted pendulums. Neural Netw. 2024, 170, 32–45. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, T.; Islam, M.R.; Brahmi, B.; Rahman, M.H. Robustness and Tracking Performance Evaluation of PID Motion Control of 7 DoF Anthropomorphic Exoskeleton Robot Assisted Upper Limb Rehabilitation. Sensors 2022, 22, 3747. [Google Scholar] [CrossRef] [PubMed]
- Soriano, L.A.; Zamora, E.; Vazquez-Nicolas, J.M.; Hernández, G.; Barraza Madrigal, J.A.; Balderas, D. PD Control Compensation Based on a Cascade Neural Network Applied to a Robot Manipulator. Front. Neurorobotics 2020, 14, 577749. [Google Scholar] [CrossRef] [PubMed]
- Sharifi, M.; Mehr, J.K.; Mushahwar, V.K.; Tavakoli, M. Autonomous Locomotion Trajectory Shaping and Nonlinear Control for Lower Limb Exoskeletons. IEEE/ASME Trans. Mechatron. 2022, 27, 645–655. [Google Scholar] [CrossRef]
- Brahmi, B.; Saad, M.; Ochoa-Luna, C.; Rahman, M.H.; Brahmi, A. Adaptive Tracking Control of an Exoskeleton Robot with Uncertain Dynamics Based on Estimated Time-Delay Control. IEEE-ASME Trans. Mechatron. 2018, 23, 575–585. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J.; Elsabbagh, A. Fuzzy radial-based impedance controller design for lower limb exoskeleton robot. Robotica 2023, 41, 326–345. [Google Scholar] [CrossRef]
- Bian, S.; Garibaldi, J.M.; Li, Z. Reshaping Wearable Robots Using Fuzzy Intelligence: Integrating Type-2 Fuzzy Decision, Intelligent Control, and Origami Structure. IEEE Trans. Fuzzy Syst. 2023, 31, 3741–3761. [Google Scholar] [CrossRef]
- Rubio, J.D.J. Bat algorithm based control to decrease the control energy consumption and modified bat algorithm based control to increase the trajectory tracking accuracy in robots. Neural Netw. 2023, 161, 437–448. [Google Scholar] [CrossRef]
- Jammeli, I.; Chemori, A.; Moon, H.; Elloumi, S.; Mohammed, S. An Assistive Explicit Model Predictive Control Framework for a Knee Rehabilitation Exoskeleton. IEEE-ASME Trans. Mechatron. 2022, 27, 3636–3647. [Google Scholar] [CrossRef]
- Batkovic, I.; Ali, M.; Falcone, P.; Zanon, M. Safe Trajectory Tracking in Uncertain Environments. IEEE Trans. Autom. Control 2023, 68, 4204–4217. [Google Scholar] [CrossRef]
- Sun, J.; Wang, J.; Yang, P.; Guo, S. Fractional-Order Prescribed Performance Sliding-Mode Control With Time-Delay Estimation for Wearable Exoskeletons. IEEE Trans. Ind. Inform. 2023, 19, 8274–8284. [Google Scholar] [CrossRef]
- Teng, L.; Gull, M.A.; Bai, S. PD-Based Fuzzy Sliding Mode Control of a Wheelchair Exoskeleton Robot. IEEE-ASME Trans. Mechatron. 2020, 25, 2546–2555. [Google Scholar] [CrossRef]
- Yang, X.; Liu, H.; Xiao, J.; Zhu, W.; Liu, Q.; Gong, G.; Huang, T. Continuous Friction Feedforward Sliding Mode Controller for a TriMule Hybrid Robot. IEEE-ASME Trans. Mechatron. 2018, 23, 1673–1683. [Google Scholar] [CrossRef]
- Jiang, B.; Karimi, H.R.; Li, B. Adaptive sliding mode control of Markov jump systems with completely unknown mode information. Int. J. Robust Nonlinear Control 2023, 33, 3749–3763. [Google Scholar] [CrossRef]
- Yu, D.; Chen, C.L.P.; Xu, H. Fuzzy Swarm Control Based on Sliding-Mode Strategy With Self-Organized Omnidirectional Mobile Robots System. IEEE Trans. Syst. Man-Cybern.-Syst. 2022, 52, 2262–2274. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.J. A model-free terminal sliding mode control for robots: Achieving fixed-time prescribed performance and convergence. ISA Trans. 2024, 144, 330–341. [Google Scholar] [CrossRef]
- Almaghout, K.; Tarvirdizadeh, B.; Alipour, K.; Hadi, A. RBF neural network-based admittance PD control for knee rehabilitation robot. Robotica 2022, 40, 4512–4534. [Google Scholar] [CrossRef]
- Wang, F.; Chao, Z.Q.; Huang, L.B.; Li, H.Y.; Zhang, C.Q. Trajectory tracking control of robot manipulator based on RBF neural network and fuzzy sliding mode. Clust.-Comput. J. Netw. Softw. Tools Appl. 2019, 22, S5799–S5809. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, T.; Sun, X.; Dong, J.; Wang, Z.; Yang, C. Sliding mode control combined with extended state observer for an ankle exoskeleton driven by electrical motor. Mechatronics 2021, 76, 102554. [Google Scholar] [CrossRef]
- Fallaha, C.; Saad, M.; Ghommam, J.; Kali, Y. Sliding Mode Control With Model-Based Switching Functions Applied on a 7-DOF Exoskeleton Arm. IEEE/ASME Trans. Mechatron. 2021, 26, 539–550. [Google Scholar] [CrossRef]
- Xu, Z.; Huang, W.; Li, Z.; Hu, L.; Lu, P. Nonlinear Nonsingular Fast Terminal Sliding Mode Control Using Deep Deterministic Policy Gradient. Appl. Sci. 2021, 11, 4685. [Google Scholar] [CrossRef]
- Lee, J.; Chang, P.H.; Jin, M. Adaptive Integral Sliding Mode Control With Time-Delay Estimation for Robot Manipulators. IEEE Trans. Ind. Electron. 2017, 64, 6796–6804. [Google Scholar] [CrossRef]
- Esmaeili, B.; Madani, S.S.; Salim, M.; Baradarannia, M.; Khanmohammadi, S. Model-free adaptive iterative learning integral terminal sliding mode control of exoskeleton robots. J. Vib. Control. 2022, 28, 3120–3139. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, B.; Wang, L.; Yu, G. An iterative learning method for realizing accurate dynamic feedforward control of an industrial hybrid robot. Sci. China Technol. Sci. 2021, 64, 1177–1188. [Google Scholar] [CrossRef]
- Yao, Q. Disturbance observer-based robust fixed-time integrated trajectory tracking control for space manipulator. Robotica 2022, 40, 3214–3232. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).