
Moving-Target Detection for FDA-MIMO Radar in Partially Homogeneous Environments

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- This study is the first to explore the target detection problem for an FDA-MIMO radar in partially homogeneous environments and illustrates that the proposed methods are general since they can also be applied in homogeneous environments.
- (2)
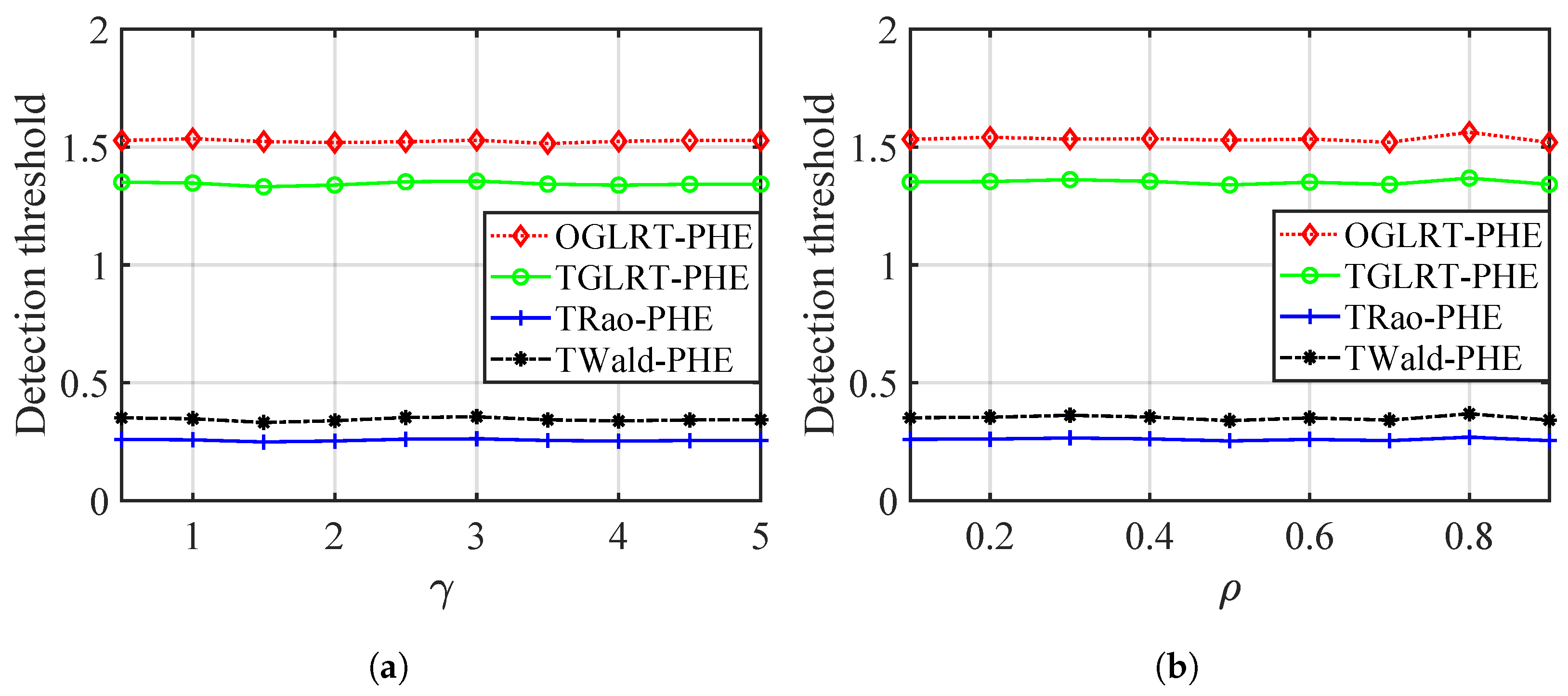
- With training data, four adaptive detectors are designed for FDA-MIMO radar based on the OGLRT, TGLRT, TRao, and TWald methods, and it is proven that they have a CFAR property for the covariance matrix and the scaling factor.
2. Problem Formulation
3. Detector Design
3.1. OGLRT
3.2. TGLRT
3.3. TRao Test
3.4. TWald Test
4. Analysis of CFAR Property
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FDA | frequency diverse array |
| MIMO | multiple-input multiple-output |
| FDA-MIMO | frequency diverse array multiple-input multiple-output |
| PA | phased array |
| DOF | degree of freedom |
| GLRT | generalized maximum likelihood ratio test |
| UGLRT | unstructured generalized likelihood ratio test |
| OGLRT | one-step GLRT |
| TGLRT | two-step GLRT |
| TRao | two-step Rao |
| TWald | two-step Wald |
| HE | homogeneous environments |
| PHE | partially homogeneous environments |
| CFAR | constant false-alarm rate |
| HRWS-SAR | high-resolution and wide-swath synthetic aperture radar |
| ICM | interference covariance matrix |
| CUT | cell under test |
| RCS | radar cross section |
| IID | independent and identically distributed |
| probability density function | |
| SCM | sample covariance matrix |
| MLE | maximum likelihood estimate |
| w.r.t | with respect to |
| NCM | noise covariance matrix |
| FIM | Fisher information matrix |
| PD | probability of detection |
| PFA | probability of false alarm |
| SNR | signal-to-noise ratio |
| JNR | jamming-to-noise ratio |
| MC | Monte Carlo |
Appendix A. Deviation of (20) and (21)
Appendix B. Deviation of (26)
References
- Antonik, P.; Wicks, M.; Griffiths, H.; Baker, C. Frequency diverse array radars. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; p. 3. [Google Scholar] [CrossRef]
- Gao, K.; Wang, W.Q.; Cai, J.; Xiong, J. Decoupled frequency diverse array range- angle-dependent beampattern synthesis using non-linearly increasing frequency offsets. IET Microwaves Antennas Propag. 2016, 10, 880–884. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; Zhang, Y.; Ji, H.; Huang, L. An Adaptive Range-Angle-Doppler Processing Approach for FDA-MIMO Radar Using Three-Dimensional Localization. IEEE J. Sel. Top. Signal Process. 2017, 11, 309–320. [Google Scholar] [CrossRef]
- Basit, A.; Wang, W.Q.; Nusenu, S.Y.; Wali, S. FDA Based QSM for mmWave Wireless Communications: Frequency Diverse Transmitter and Reduced Complexity Receiver. IEEE Trans. Wirel. Commun. 2021, 20, 4571–4584. [Google Scholar] [CrossRef]
- Gui, R.; Huang, B.; Wang, W.Q.; Sun, Y. Generalized Ambiguity Function for FDA Radar Joint Range, Angle and Doppler Resolution Evaluation. IEEE Geosci. Remote Sens. Lett. 2020, 19, 3502305. [Google Scholar] [CrossRef]
- Bang, H.; Yan, Y.; Basit, A.; Wang, W.Q.; Cheng, J. Radar Cross Section Characterization of Frequency Diverse Array Radar. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 460–471. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO Radar Signal Processing; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008. [Google Scholar]
- Tan, M.; Wang, C.; Li, Z. Correction Analysis of Frequency Diverse Array Radar About Time. IEEE Trans. Antennas Propag. 2021, 69, 834–847. [Google Scholar] [CrossRef]
- Lan, L.; Xu, J.; Liao, G.; Zhang, Y.; So, H.C. Suppression of Mainbeam Deceptive Jammer with FDA-MIMO Radar. IEEE Trans. Veh. Technol. 2020, 69, 11584–11598. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; Zhu, S.; Huang, L.; So, H.C. Joint Range and Angle Estimation Using MIMO Radar with Frequency Diverse Array. IEEE Trans. Signal Process. 2015, 63, 3396–3410. [Google Scholar] [CrossRef]
- Ji, S.; Wang, W.Q.; Chen, H.; Zhang, S. On Physical-Layer Security of FDA Communications Over Rayleigh Fading Channels. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 476–490. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, W.; Chen, Z.; Zhao, Q.; Deng, Y.; Wang, R. A Novel High-Resolution and Wide-Swath SAR Imaging Mode Using Frequency Diverse Planar Array. In Proceedings of the EUSAR 2021, 13th European Conference on Synthetic Aperture Radar, Virtal Event, 29 March–1 April 2021; pp. 1–5. [Google Scholar]
- Zhou, Y.; Wang, W.; Chen, Z.; Zhao, Q.; Zhang, H.; Deng, Y.; Wang, R. High-Resolution and Wide-Swath SAR Imaging Mode Using Frequency Diverse Planar Array. IEEE Geosci. Remote Sens. Lett. 2021, 18, 321–325. [Google Scholar] [CrossRef]
- Huang, B.; Wang, W.Q.; Zhang, S.; Wang, H.; Gui, R.; Lu, Z. A Novel Approach for Spaceborne SAR Scattered-Wave Deception Jamming Using Frequency Diverse Array. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1568–1572. [Google Scholar] [CrossRef]
- Bang, H.; Wang, W.Q.; Zhang, S.; Liao, Y. FDA-Based Space–Time–Frequency Deceptive Jamming Against SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2127–2140. [Google Scholar] [CrossRef]
- Huang, L.; Zong, Z.; Zhang, S.; Wang, W.Q. 2-D Moving Target Deception Against Multichannel SAR-GMTI Using Frequency Diverse Array. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4006705. [Google Scholar] [CrossRef]
- Cheng, J.; Wang, W.Q.; Zhang, S. Joint MIMO and Frequency Diverse Array for Suppressing Mainlobe Interferences. In Proceedings of the International Symposium on Antennas and Propagation, Osaka, Japan, 25–28 January 2021. [Google Scholar]
- Gui, R.; Wang, W.Q.; Farina, A.; So, H.C. FDA radar with doppler-spreading consideration: Mainlobe clutter suppression for blind-doppler target detection. Signal Process. 2021, 179, 107773. [Google Scholar] [CrossRef]
- Lan, L.; Liao, G.; Xu, J.; Zhang, Y.; Fioranelli, F. Suppression Approach to Main-Beam Deceptive Jamming in FDA-MIMO Radar Using Nonhomogeneous Sample Detection. IEEE Access 2018, 6, 34582–34597. [Google Scholar] [CrossRef]
- Zhang, Y.; Liao, G.; Xu, J.; Lan, L. Mainlobe Deceptive Jammer Suppression Based on Quadratic Phase Coding in FDA-MIMO Radar. Remote Sens. 2022, 14, 5831. [Google Scholar] [CrossRef]
- Wan, P.; Weng, Y.; Xu, J.; Liao, G. Range Gate Pull-Off Mainlobe Jamming Suppression Approach with FDA-MIMO Radar: Theoretical Formalism and Numerical Study. Remote Sens. 2022, 14, 1499. [Google Scholar] [CrossRef]
- Lan, L.; Marino, A.; Aubry, A.; Maio, A.D.; Zhang, Y. GLRT-based Adaptive Target Detection in FDA-MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 597–613. [Google Scholar] [CrossRef]
- Gui, R.; Wang, W.Q.; Zheng, Z. Low-complexity GLRT for FDA radar without training data. Digit. Signal Process. 2020, 107, 102861. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, L.; Lu, Z.; Zhang, S. Target Detection Performance Analysis of FDA-MIMO Radar. IEEE Access 2019, 7, 164276–164285. [Google Scholar] [CrossRef]
- Huang, B.; Basit, A.; Gui, R.; Wang, W.Q. Adaptive Moving Target Detection Without Training Data for FDA-MIMO Radar. IEEE Trans. Veh. Technol. 2022, 71, 220–232. [Google Scholar] [CrossRef]
- Xu, J.; Zhu, S.; Liao, G. Range Ambiguous Clutter Suppression for Airborne FDA-STAP Radar. IEEE J. Sel. Top. Signal Process. 2015, 9, 1620–1631. [Google Scholar] [CrossRef]
- Chen, X.; Chen, B.; Guan, J.; Huang, Y.; He, Y. Space-Range-Doppler Focus-Based Low-observable Moving Target Detection Using Frequency Diverse Array MIMO Radar. IEEE Access 2018, 6, 43892–43904. [Google Scholar] [CrossRef]
- Zeng, L.; Wang, Y.L.; Liu, W.; Liu, J.; Lan, L. GLRT-based detectors for FDA-MIMO radar with training data. Digit. Signal Process. 2022, 130, 103729. [Google Scholar] [CrossRef]
- Kraut, S.; Scharf, L.L. The CFAR Adaptive Subspace Detector is a Scale-Invariant GLRT. IEEE Trans. Signal Process. 1999, 47, 2538. [Google Scholar] [CrossRef]
- Liu, W.; Xie, W.; Liu, J.; Wang, Y. Adaptive Double Subspace Signal Detection in Gaussian Background—Part II: Partially Homogeneous Environments. IEEE Trans. Signal Process. 2014, 62, 2358–2369. [Google Scholar] [CrossRef]
- Dong, Y.; Ming, L.; Kai, L.; Tang, Z.; Liu, W. Adaptive Direction Detection in Deterministic Interference and Partially Homogeneous Noise. IEEE Signal Process. Lett. 2017, 24, 599–603. [Google Scholar] [CrossRef]
- Liu, J.; Liu, W.; Hao, C.; Orlando, D.; Farina, A. Robust GLRT Detection Exploiting Persymmetry in Partially Homogeneous Environments. In Proceedings of the 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), Chengdu, China, 23–26 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, C.; Wang, Y.; Liu, W.; Liu, J.; Du, Q. Adaptive Detection with Training Data in Partially Homogeneous Environments for Colocated MIMO Radar. Signal Process. 2023, 217, 109353. [Google Scholar] [CrossRef]
- Pulsone, N.; Rader, C. Adaptive beamformer orthogonal rejection test. IEEE Trans. Signal Process. 2001, 49, 521–529. [Google Scholar] [CrossRef]
- Bandiera, F.; Orlando, D.; Ricci, G. Advanced Radar Detection Schemes Under Mismatched Signal Models; Synthesis Lectures on Signal Processing Series; Springer: Cham, Switzerland, 2009; Volume 4, pp. 1–105. [Google Scholar] [CrossRef]
- Gui, R.; Wang, W.Q.; Shao, H. General receiver design for FDA radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018. [Google Scholar]
- Kelly, E. An Adaptive Detection Algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef]
- Kelly, E.J.; Forsythe, K.M. Adaptive Detection and Parameter Estimation for Multidimensional Signal Models; NASA STI/Recon Technical Report N; MIT Lincoln Laboratory: Lexington, MA, USA, 1989. [Google Scholar]
- Conte, E.; Maio, A.D.; Ricci, G. GLRT-based adaptive detection algorithms for range-spread targets. IEEE Trans. Signal Process. 2002, 49, 1336–1348. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y.; Xie, W. Fisher information matrix, Rao test, and Wald test for complex-valued signals and their applications. Signal Process. 2014, 94, 1–5. [Google Scholar] [CrossRef]
- Liu, W.; Xie, W.; Liu, J.; Wang, Y. Adaptive Double Subspace Signal Detection in Gaussian Background—Part I: Homogeneous Environments. IEEE Trans. Signal Process. 2014, 62, 2345–2357. [Google Scholar] [CrossRef]
- Tague, J.A.; Caldwell, C.I. Expectations of useful complex Wishart forms. Multidimens. Syst. Signal Process. 1994, 5, 263–279. [Google Scholar] [CrossRef]
- Zhang, X. Matrix Analysis and Applications; Cambridge University Press: Cambridge, UK, 2007; Volume 309, Part I; pp. 3–94. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, C.; Zhang, R.; Huang, B.; Xu, M.; Wang, Z.; Liu, L.; Lu, Z.; Jin, Y. Moving-Target Detection for FDA-MIMO Radar in Partially Homogeneous Environments. Electronics 2024, 13, 851. https://doi.org/10.3390/electronics13050851
He C, Zhang R, Huang B, Xu M, Wang Z, Liu L, Lu Z, Jin Y. Moving-Target Detection for FDA-MIMO Radar in Partially Homogeneous Environments. Electronics. 2024; 13(5):851. https://doi.org/10.3390/electronics13050851
Chicago/Turabian StyleHe, Changshan, Running Zhang, Bang Huang, Mingming Xu, Zhibin Wang, Lei Liu, Zheng Lu, and Ye Jin. 2024. "Moving-Target Detection for FDA-MIMO Radar in Partially Homogeneous Environments" Electronics 13, no. 5: 851. https://doi.org/10.3390/electronics13050851
APA StyleHe, C., Zhang, R., Huang, B., Xu, M., Wang, Z., Liu, L., Lu, Z., & Jin, Y. (2024). Moving-Target Detection for FDA-MIMO Radar in Partially Homogeneous Environments. Electronics, 13(5), 851. https://doi.org/10.3390/electronics13050851