

Device Identity Recognition Based on an Adaptive Environment for Intrinsic Security Fingerprints

Abstract
1. Introduction
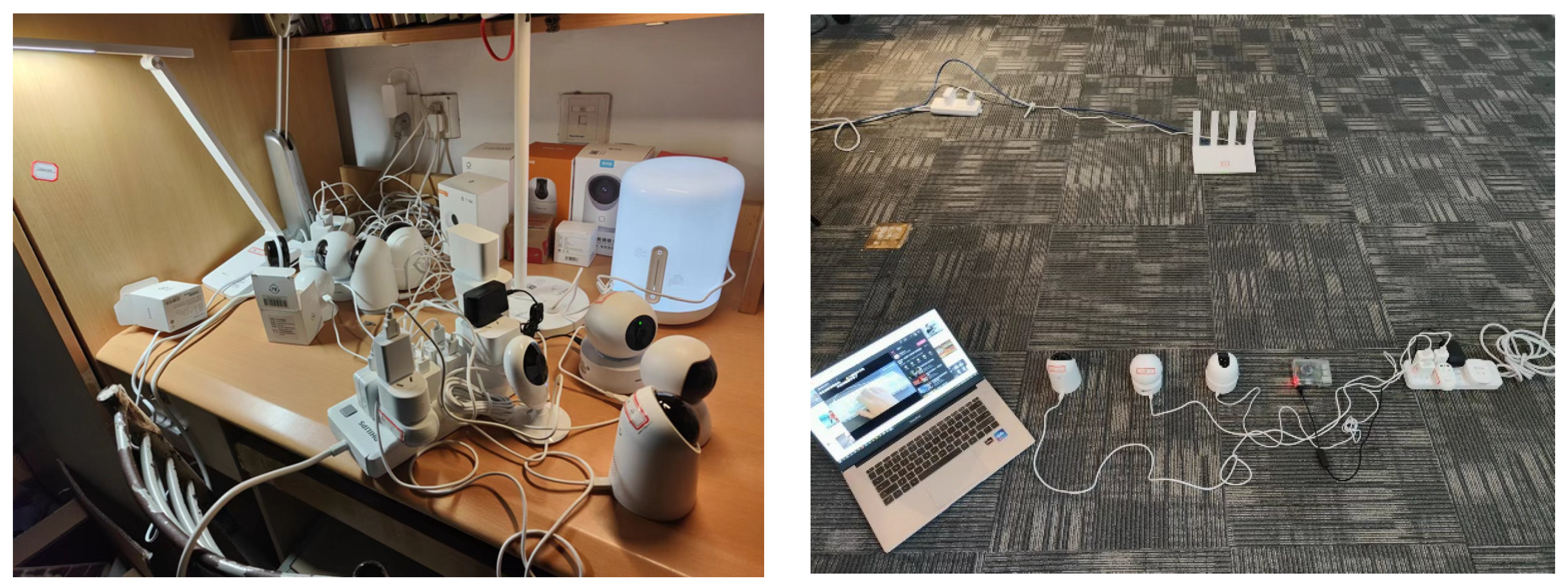
- Real-time data collection in authentic outdoor environments, capturing the dynamic changes in physical features used to construct device intrinsic fingerprints;
- Introduction of the Gramian angular field transformation, processing collected data to map it to a high-dimensional feature space, capturing the spatiotemporal characteristics of intrinsic fingerprints.
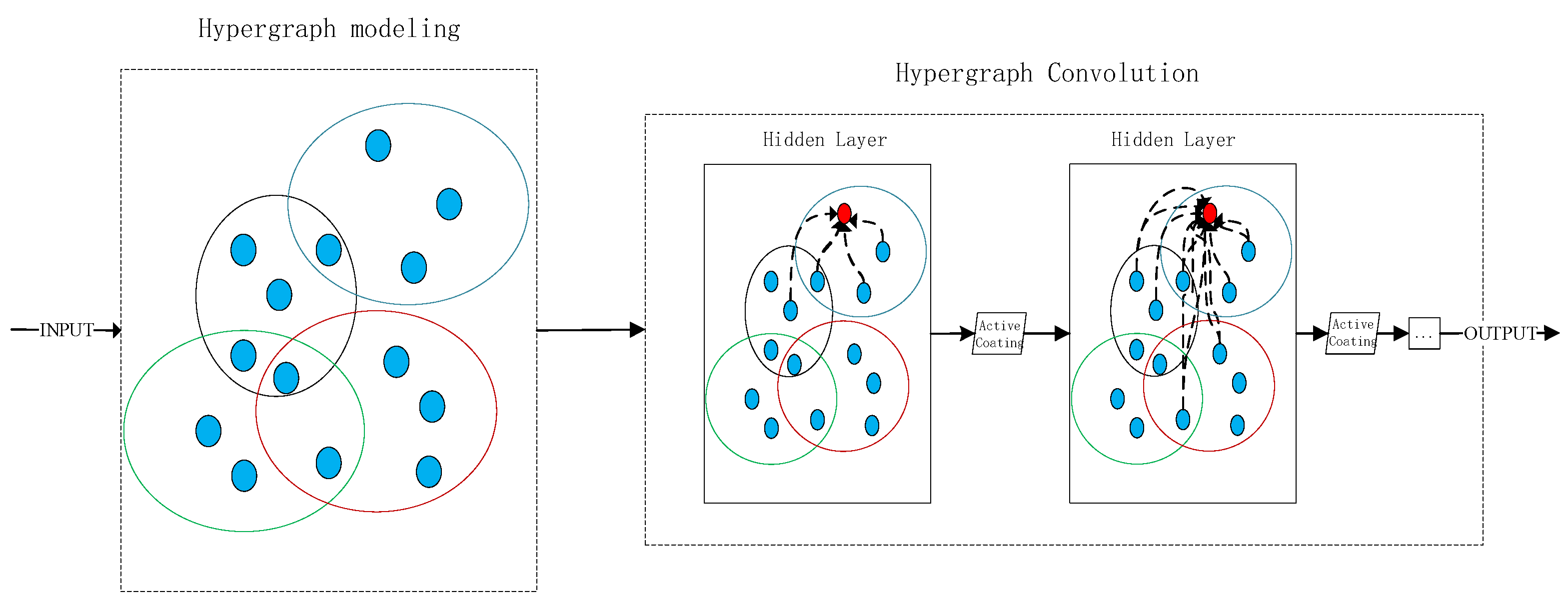
- Design and application of a hypergraph neural network to extract and learn continuous spatiotemporal features of device intrinsic security fingerprints in real-world environments.
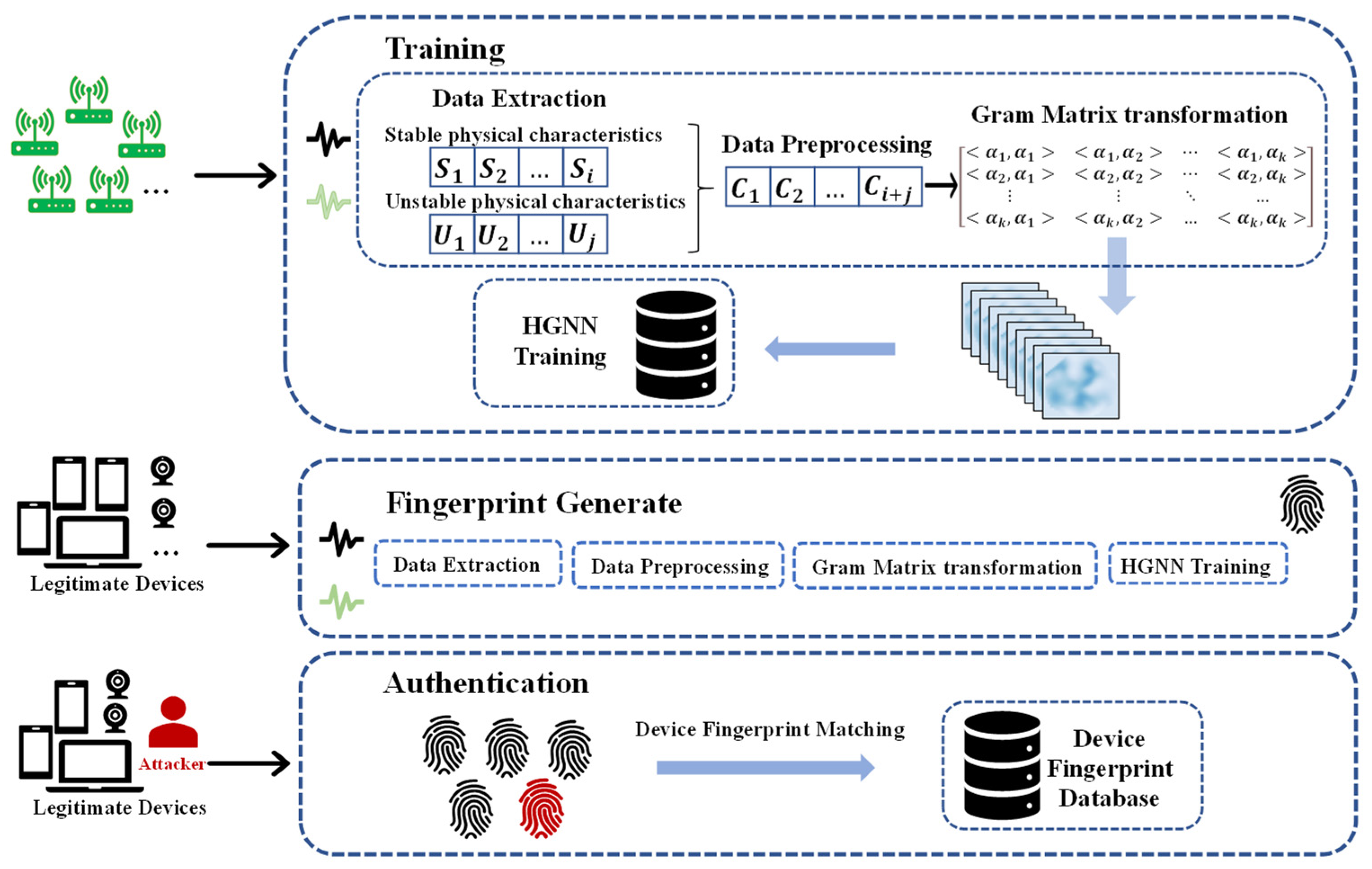
2. System Overview
2.1. Model Training
2.2. Fingerprint Generation
2.3. Identity Recognition
3. Extraction of Physical Device Features
3.1. Clock Deviation Fingerprint
3.2. Channel State Information
4. Feature Transformation and Model Construction
4.1. Gramian Angular Fields
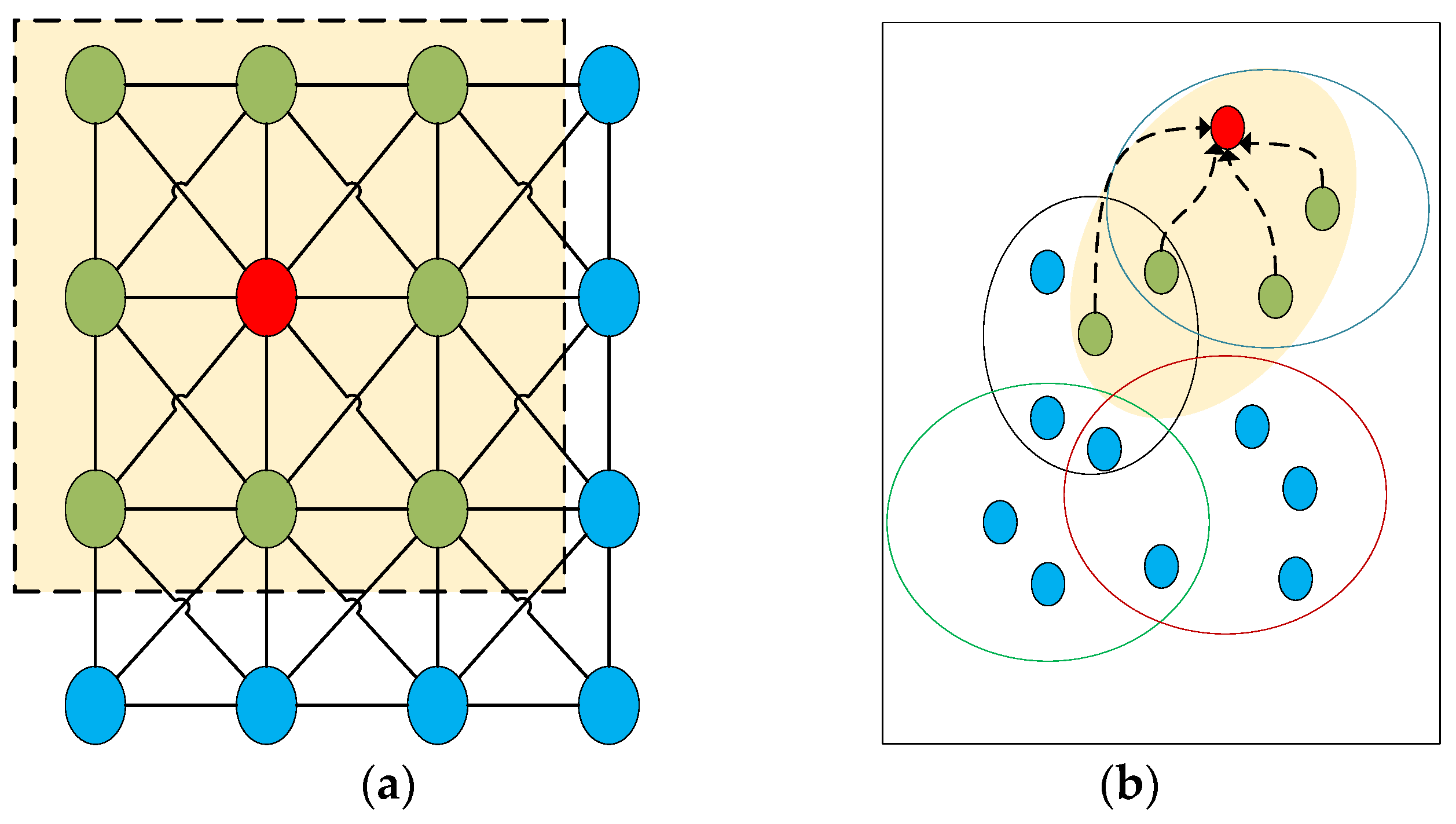
4.2. Hypergraph Neural Networks
5. Experimental Conclusions
5.1. Experimental Setup and Evaluation Methods
5.2. Analysis of Experimental Results
6. Relate Works
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kaur, B.; Dadkhah, S.; Shoeleh, F.; Neto, E.C.P.; Xiong, P.; Iqbal, S.; Lamontagne, P.; Ray, S.; Ghorbani, A.A. Internet of things (IoT) security dataset evolution: Challenges and future directions. Internet Things 2023, 22, 100780. [Google Scholar]
- Jurcut, A.; Niculcea, T.; Ranaweera, P.; Le-Khac, N.A. Security considerations for Internet of Things: A survey. SN Comput. Sci. 2020, 1, 193. [Google Scholar]
- Dean, A.; Agyeman, M.O. A study of the advances in IoT security. In Proceedings of the 2nd International Symposium on Computer Science and Intelligent Control, Stockholm, Sweden, 21–23 September 2018; pp. 1–5. [Google Scholar]
- Malhotra, P.; Singh, Y.; Anand, P.; Bangotra, D.K.; Singh, P.K.; Hong, W.C. Internet of things: Evolution, concerns and security challenges. Sensors 2021, 21, 1809. [Google Scholar]
- Rachit, B.S.; Ragiri, P.R. Security trends in Internet of Things: A survey. SN Appl. Sci. 2021, 3, 121. [Google Scholar]
- Xu, K.; Fu, S.; Li, Q.; Liu, B.; Jiang, W.; Wu, B.; Feng, X. Research Progress on the Architecture of Endogenous Security System on the Internet. J. Comput. Sci. 2021, 44, 2149. [Google Scholar]
- Garibo-i-Orts, Ò.; Firbas, N.; Sebastiá, L.; Conejero, J.A. Gramian angular fields for leveraging pretrained computer vision models with anomalous diffusion trajectories. Phys. Rev. E 2023, 107, 034138. [Google Scholar]
- Feng, Y.; You, H.; Zhang, Z.; Ji, R.; Gao, Y. Hypergraph neural networks. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 3558–3565. [Google Scholar]
- Zhang, D.; Wu, D.; Niu, K.; Wang, X.; Zhang, F.; Yao, J.; Jiang, D.; Qin, F. Practical issues and challenges in CSI-based integrated sensing and communication. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022. [Google Scholar]
- Gringoli, F.; Schulz, M.; Link, J.; Hollick, M. Free your CSI: A channel state information extraction platform for modern Wi-Fi chipsets. In Proceedings of the 13th International Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization, Los Cabos, Mexico, 25 October 2019; pp. 21–28. [Google Scholar]
- Schulz, M.; Wegemer, D.; Hollick, M. Nexmon: Build your own wi-fi testbeds with low-level mac and phy-access using firmware patches on off-the-shelf mobile devices. In Proceedings of the 11th Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization, Snowbird, UT, USA, 20 October 2017; pp. 59–66. [Google Scholar]
- Wang, J.; Li, S.; Ji, W.; Jiang, T.; Song, B. A T-CNN time series classification method based on Gram matrix. Sci. Rep. 2022, 12, 15731. [Google Scholar]
- Berge, C. Graphes; Gauthier-Villars: Paris, France, 1983. [Google Scholar]
- Yu, J.; Tao, D.; Wang, M. Adaptive hypergraph learning and its application in image classification. IEEE Trans. Image Process. 2012, 21, 3262–3272. [Google Scholar]
- Jiang, W.; Liu, B.; Wang, C. Endogenous Security Network Architecture. Telecommun. Sci. 2019, 35, 20–28. [Google Scholar]
- Yu, J.; Hu, A.; Li, G.; Peng, L. A robust RF fingerprinting approach using multisampling convolutional neural network. IEEE Internet Things J. 2019, 6, 6786–6799. [Google Scholar]
- Christin, N.; Safavi-Naini, R. Financial cryptography and data security. In Proceedings of the 18th International Conference, Christ Church, Barbados, 3–7 March 2014. [Google Scholar]
- Abbas, S.; Nasir, Q.; Nouichi, D.; Abdelsalam, M.; Abu Talib, M.; Abu Waraga, O.; Khan, A.U.R. Improving security of the Internet of Things via RF fingerprinting based device identification system. Neural Comput. Appl. 2021, 33, 14753–14769. [Google Scholar]
- de Souza, C.A.; Westphall, C.B.; Machado, R.B.; Loffi, L.; Westphall, C.M.; Geronimo, G.A. Intrusion detection and prevention in fog based iot environments: A systematic literature review. Comput. Netw. 2022, 214, 109154. [Google Scholar]
- Gabor, D. Electrical engineers-part III: Radio and communication engineering. J. Inst. 1946, 93, 39. [Google Scholar]
- Tang, W.; Jia, F.; Wang, X. Image Large Rotation and Scale Estimation Using the Gabor Filter. Electronics 2022, 11, 3471. [Google Scholar]
- Miao, Y.; Jeon, J.Y.; Kong, Y.; Park, G. Phase-based displacement measurement on a straight edge using an optimal complex Gabor filter. Mech. Syst. Signal Process. 2022, 164, 108224. [Google Scholar]
- Vashishth, S.; Sanyal, S.; Nitin, V.; Talukdar, P. Composition-based multi-relational graph convolutional networks. arXiv 2019, arXiv:1911.03082. [Google Scholar]
- Jin, D.; Huo, C.; Dang, J.; Zhu, P.; Zhang, W.; Pedrycz, W.; Wu, L. Heterogeneous graph neural networks using self-supervised reciprocally contrastive learning. arXiv 2022, arXiv:2205.00256. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices | Precision (%) | Recall (%) | F1 |
|---|---|---|---|
| Device-1 | 97.8 | 97.8 | 0.978 |
| Device-2 | 98.1 | 96.7 | 0.974 |
| Device-3 | 98.0 | 97.5 | 0.97 |
| Device-4 | 97.2 | 98.0 | 0.976 |
| Device-5 | 97.3 | 97.1 | 0.972 |
| Devices | Precision (%) | Recall (%) | F1 (%) |
|---|---|---|---|
| Device-1 | 96.3 | 93.4 | 94.5 |
| Device-2 | 94.0 | 92.1 | 93.0 |
| Device-3 | 94.8 | 93.0 | 94.5 |
| Device-4 | 97.1 | 95.0 | 96.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, Z.; Zhang, G.; Zhang, B.; Zhang, T. Device Identity Recognition Based on an Adaptive Environment for Intrinsic Security Fingerprints. Electronics 2024, 13, 656. https://doi.org/10.3390/electronics13030656
Xi Z, Zhang G, Zhang B, Zhang T. Device Identity Recognition Based on an Adaptive Environment for Intrinsic Security Fingerprints. Electronics. 2024; 13(3):656. https://doi.org/10.3390/electronics13030656
Chicago/Turabian StyleXi, Zesheng, Gongxuan Zhang, Bo Zhang, and Tao Zhang. 2024. "Device Identity Recognition Based on an Adaptive Environment for Intrinsic Security Fingerprints" Electronics 13, no. 3: 656. https://doi.org/10.3390/electronics13030656
APA StyleXi, Z., Zhang, G., Zhang, B., & Zhang, T. (2024). Device Identity Recognition Based on an Adaptive Environment for Intrinsic Security Fingerprints. Electronics, 13(3), 656. https://doi.org/10.3390/electronics13030656