
Set Restabilization of Perturbed Boolean Control Networks

Abstract
1. Introduction
- An algorithm for calculating absorbable attractors is provided, where absorbable attractors play a key role in our method.
- For the perturbed BCNs, a method is developed to solve the set restabilization problem of BCNs subject to multi-column function perturbations, which has not been settled yet. This method has a wider scope of application, since most results in the existing literature are mainly about restabilization to a singleton, which is a special case of set restabilization.
2. Materials and Methods
- .
- represents the set , where denotes the ith column of the identity matrix.
- stands for the matrix , called a logical matrix.
- and express the ith column and ith row of a matrix L, respectively.
- () is the set of logical (real) matrices.
- is the set of matrices with all entries in .
- For two matrices and , the STP of A and B iswhere r is the least common multiple of n and p; ⊗ is the Kronecker product of matrices.
- The logical matrixcalled a power-reducing matrix, satisfies .
- When and , .
- When , , where .
3. Results
- . How do we tune the old controller when ?
- . How do we tune the old controller when there are attractors not contained in the target set ?
3.1. Modification for the Largest Invariant Subset
| Algorithm 1 The feedback matrix G can be modified by the following steps to make equal to the largest invariant subset of the new closed-loop system. |
|
3.2. Modification for Unstable Attractors
| Algorithm 2 Let all attractors that are not contained in be given in (11). Assume that , have been obtained. Then, can be calculated by the following steps. |
|
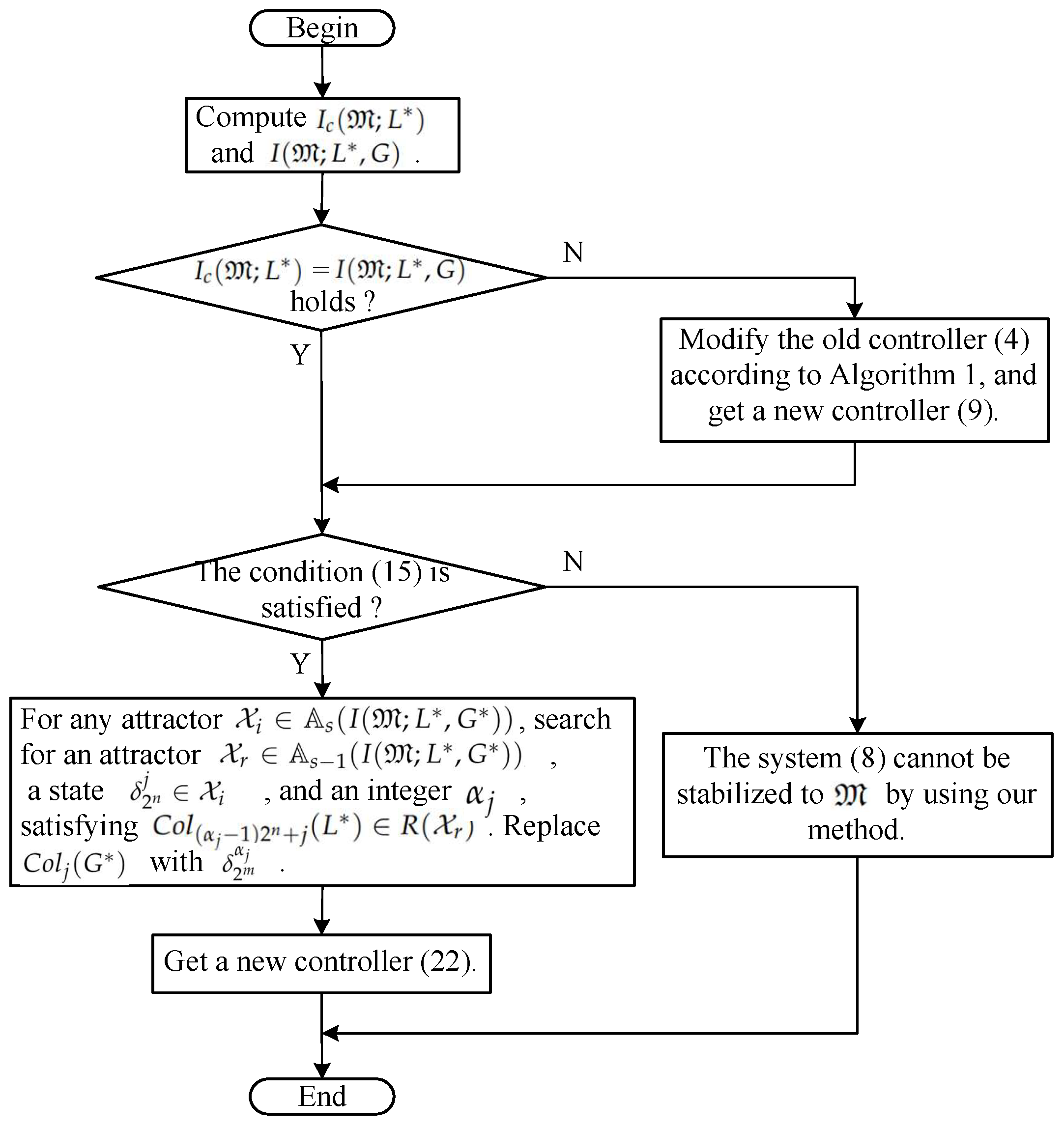
3.3. Parameter Adjustment Algorithm
| Algorithm 3 The closed-loop system (5) is -stable. Assume that BCN (3) is perturbed, its structure matrix L becomes , and the new closed-loop system (8) has p attractors that are not contained in and are given as in (11). Then, under Assumption A1, the problem of fine-tuning the old controller can be solved to restabilize BCN (8) to by the following steps. |
|
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Sets | |
| Set of all n dimensional real vectors | |
| Set of dimensional real matrices | |
| Set of dimensional logical matrices | |
| Set of dimensional matrices with all entries in | |
| Set of all columns in | |
| Target set | |
| Largest invariant subset contained in | |
| Largest control invariant subset contained in | |
| Set of all absorbable attractors of attractor by s steps | |
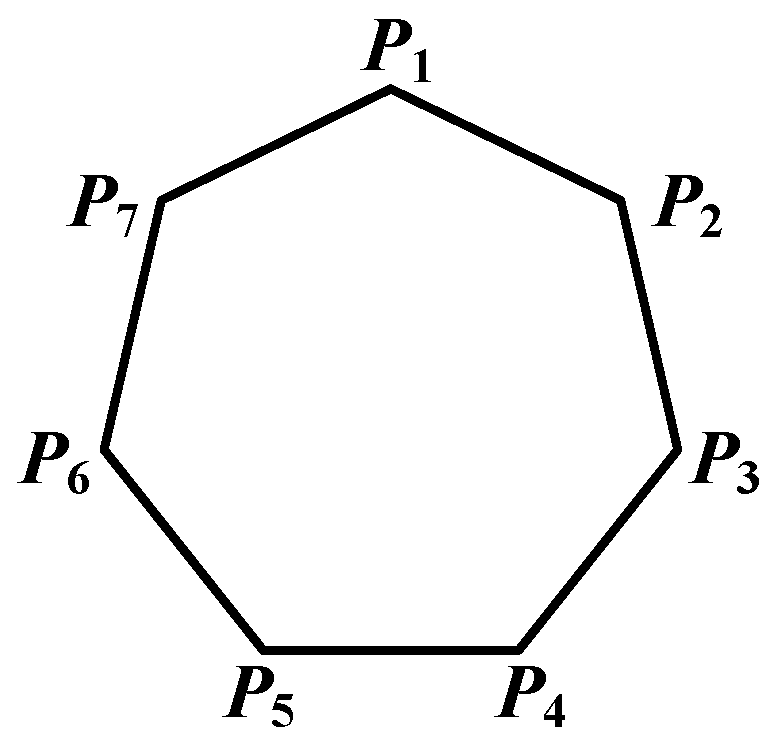
| Set of n players | |
| Notations | |
| dimensional identity matrix | |
| ith column of a matrix L | |
| ith row of a matrix L | |
| ith column of | |
| dimensional logical matrix | |
| Least common multiplier of n and p | |
| ⊗ | Kronecker product |
| ⋉ | STP |
| Power-reducing matrix | |
| ⊕ | Boolean addition |
| ⊙ | Boolean product |
| Attraction domain of an attractor | |
| Acronyms | |
| BN | Boolean network |
| BCN | Boolean control network |
| STP | Semi-tensor product |
References
- Kauffman, S. Metabolic stability and epigenesis in randomly constructed genetic net. J. Theor. Biol. 1969, 22, 437–467. [Google Scholar] [CrossRef] [PubMed]
- Zong, Y.; Dong, L.; Lu, X. Entropy Model of Rosin Autonomous Boolean Network DigitalTrue Random Number Generator. Electronics 2024, 13, 1140. [Google Scholar] [CrossRef]
- Cheng, D.; He, F.; Qi, H.; Xu, T. Modeling, analysis and control of networked evolutionary game. IEEE Trans. Autom. Control 2015, 60, 2402–2415. [Google Scholar] [CrossRef]
- Shmulevich, I.; Dougherty, E.; Zhang, W. From Boolean to probabilistic Boolean networks as models of genetic regulatory network. Proc. IEEE 2002, 90, 1778–1792. [Google Scholar] [CrossRef]
- Cheng, D.; Qi, H.; Li, Z.; Liu, J. Stability and stabilization of Boolean network. Int. J. Robust Nonlinear Control 2011, 21, 134–156. [Google Scholar] [CrossRef]
- Li, R.; Yang, M.; Chu, T. State feedback stabilization for Boolean control network. IEEE Trans. Autom. Control 2013, 58, 1853–1857. [Google Scholar] [CrossRef]
- Tian, H.; Zhang, H.; Wang, Z.; Hou, Y. Stabilization of k-valued logical control networks by open-Cloop control via the reverse transfer method. Automatica 2017, 83, 387–390. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y. Output feedback stabilization control design for Boolean control network. Automatica 2013, 49, 3641–3645. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y.; Liu, Z. Simultaneous stabilization for a set of Boolean control network. Syst. Control. Lett. 2013, 62, 1168–1174. [Google Scholar] [CrossRef]
- Lin, L.; Cao, J.; Abdel-Aty, M.; Al-Juboori, U. Topological Structure, Reachability, and Stabilization of Constrained Boolean Control Networks via Event-Triggered Control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3565–3574. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, P.; Gui, W.; Yang, C. Set stability and set stabilization of Boolean control networks based on invariant subset. Automatica 2015, 61, 106–112. [Google Scholar] [CrossRef]
- Li, F.; Tang, Y. Set stabilization for switched Boolean control network. Automatica 2017, 78, 223–230. [Google Scholar] [CrossRef]
- Liu, R.; Lu, J.; Lou, J.; Alsaedi, A.; Alsaadi, F. Set stabilization of Boolean networks under pinning control strategy. Neurocomputing 2017, 260, 142–148. [Google Scholar] [CrossRef]
- Tian, H.; Hou, Y. State feedback design for set stabilization of probabilistic Boolean control network. J. Frankl. Inst. 2019, 356, 4358–4377. [Google Scholar] [CrossRef]
- Zhu, S.; Liu, Y.; Lou, J.; Lu, J.; Alsaadi, F. Sampled-Data State Feedback Control for the Set Stabilization of Boolean Control Network. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1580–1589. [Google Scholar] [CrossRef]
- Jia, Y.; Wang, B.; Feng, J.; Cheng, D. Set Stabilization of Boolean Control Networks via Output-Feedback Controller. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7527–7536. [Google Scholar] [CrossRef]
- Meng, M.; Feng, J. Function perturbations in Boolean networks with its application in a D. Melanogaster gene network. Eur. J. Control 2014, 20, 87–94. [Google Scholar] [CrossRef]
- Liu, Y.; Li, B.; Chen, H.; Cao, J. Function perturbations on singular Boolean network. Automatica 2017, 84, 36–42. [Google Scholar] [CrossRef]
- Wu, J.; Liu, Y.; Ruan, Q.; Lou, J. Robust stability of Switched Boolean Networks with function perturbation. Nonlinear Anal. Hybrid Syst. 2022, 46, 101216. [Google Scholar] [CrossRef]
- Yang, X.; Li, H. Reachability, controllability, and stabilization of Boolean control networks with stochastic function perturbation. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 1198–1208. [Google Scholar] [CrossRef]
- Xiao, Y.; Dougherty, E. The impact of function perturbations in Boolean network. Bioinformatics 2007, 23, 1265–1273. [Google Scholar] [CrossRef] [PubMed]
- Qian, X.; Dougherty, E. Effect of function perturbation on the steady-state distribution of genetic regulatory networks: Optimal structural intervention. IEEE Trans. Signal Process. 2008, 56, 4966–4976. [Google Scholar] [CrossRef]
- Li, X.; Li, H.; Li, Y.; Yang, X. Function perturbation impact on stability in distribution of probabilistic Boolean network. Math. Comput. Simul. 2020, 177, 4358–4377. [Google Scholar] [CrossRef]
- Zhu, S.; Lu, J.; Huang, T.; Liu, Y. Output robustness of probabilistic Boolean control networks with respect to one-bit perturbation. IEEE Trans. Control Netw. Syst. 2020, 7, 1769–1777. [Google Scholar] [CrossRef]
- Li, L.; Zhang, A.; Lu, J. Robust set stability of probabilistic Boolean networks under general stochastic function perturbation. Inf. Sci. 2022, 582, 833–849. [Google Scholar] [CrossRef]
- Zhong, J.; Ho, D.; Lu, J.; Xu, W. Global robust stability and stabilization of Boolean network with disturbance. Automatica 2017, 84, 142–148. [Google Scholar] [CrossRef]
- Li, H.; Yang, X.; Wang, S. Robustness for stability and stabilization of Boolean networks with stochastic function perturbation. IEEE Trans. Autom. Control 2021, 66, 1231–1237. [Google Scholar] [CrossRef]
- Zhong, J.; Liu, Y.; Lu, J.; Gui, W. Pinning control for stabilization of Boolean networks under knock-out perturbation. IEEE Trans. Autom. Control 2022, 67, 1550–1557. [Google Scholar] [CrossRef]
- Campbell, C.; Albert, R. Stabilization of perturbed Boolean network attractors through compensatory interaction. BMC Syst. Biol. 2014, 53, 53. [Google Scholar] [CrossRef]
- Li, X.; Li, H.; Zhao, G. Function perturbation impact on feedback stabilization of Boolean control network. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2548–2554. [Google Scholar] [CrossRef]
- Hou, Y.; Tian, H.; Wang, C. Restabilization of perturbed Boolean control networks based on absorbable attractor. Asian J. Control 2024. [Google Scholar] [CrossRef]
- Cheng, D.; Qi, H.; Li, Z. Analysis and Control of Boolean Networks: A Semi-Tensor Product Approach; Springer: London, UK, 2011. [Google Scholar]
- Veliz-Cuba, A.; Stigler, B. Boolean models can explain bistability in the lac operon. J. Comput. Biol. 2011, 18, 783–794. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Research Contents | Existing Problems |
|---|---|---|
| [17,18,19,20,21,22,23,24,25] | They studied the influence of perturbations on BNs. | They have not investigated how to ensure the stability of perturbed BCNs. |
| [20,26,27,28,29] | They designed various robust controllers for the stabilization of perturbed BCNs. | When some sensitive parameters change slightly, the perturbed BCN may become unstable. For this case, they have not studied how to adjust the parameters to restabilize the perturbed BCN to its original state or target set. |
| [30] | It proposed a parameter adjustment algorithm that can deal with the single column perturbation problem of BCNs. | It cannot solve the restabilization problem of BCNs subject to multi-column function perturbations. |
| [31] | It developed a parameter adjustment method that can handle the multi-column function perturbation problem of BCNs. | It cannot be directly used to solve the set restabilization problem of perturbed BCNs. |
| 1, 1, 1 | 1, 1, 0 | 1, 0, 1 | 1, 0, 0 | 0, 1, 1 | 0, 1, 0 | 0, 0, 1 | 0, 0, 0 | |
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 2 | |
|---|---|---|
| 1 | ||
| 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, Y.; Tian, H. Set Restabilization of Perturbed Boolean Control Networks. Electronics 2024, 13, 3624. https://doi.org/10.3390/electronics13183624
Hou Y, Tian H. Set Restabilization of Perturbed Boolean Control Networks. Electronics. 2024; 13(18):3624. https://doi.org/10.3390/electronics13183624
Chicago/Turabian StyleHou, Yanfang, and Hui Tian. 2024. "Set Restabilization of Perturbed Boolean Control Networks" Electronics 13, no. 18: 3624. https://doi.org/10.3390/electronics13183624
APA StyleHou, Y., & Tian, H. (2024). Set Restabilization of Perturbed Boolean Control Networks. Electronics, 13(18), 3624. https://doi.org/10.3390/electronics13183624