
A Space Vector Modulation Strategy for Improving Voltage Transfer Ratio of Multi-Phase Inverter


Abstract
1. Introduction
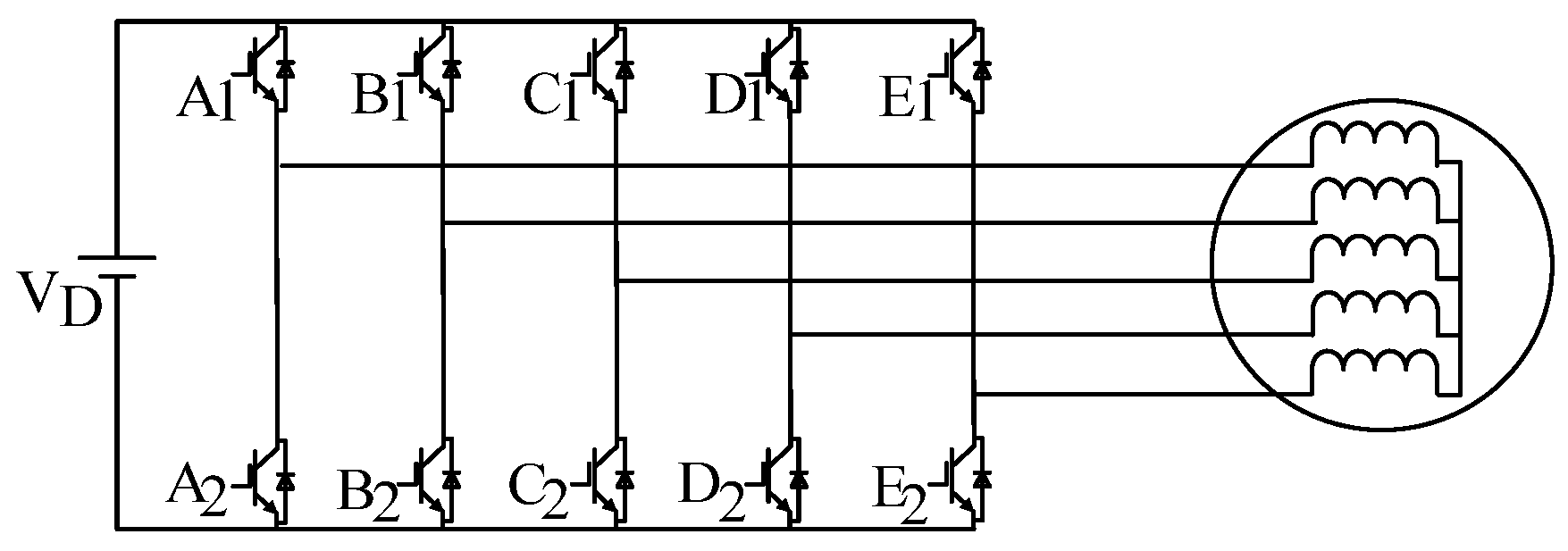
2. Topology Structure of Five-Phase Variable-Frequency Adjustable-Speed Control System
3. Operating Principle and Analysis of Harmonic Characteristics of Traditional Five-Phase Space Voltage Vector Modulation
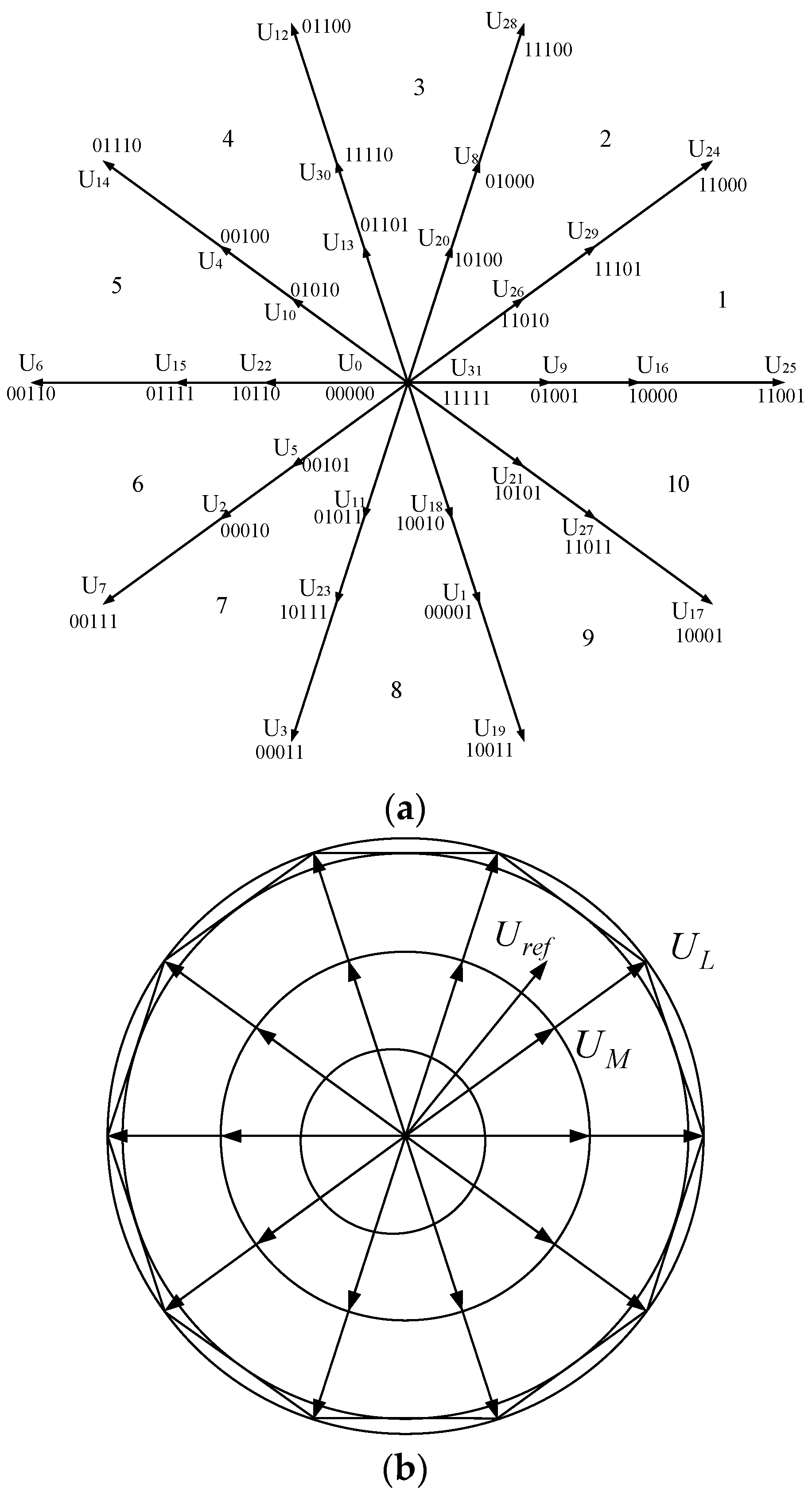
3.1. Operating Principle
3.2. Harmonic Characteristic
4. Space Voltage Vector Over-Modulation Based on Vector Weighting
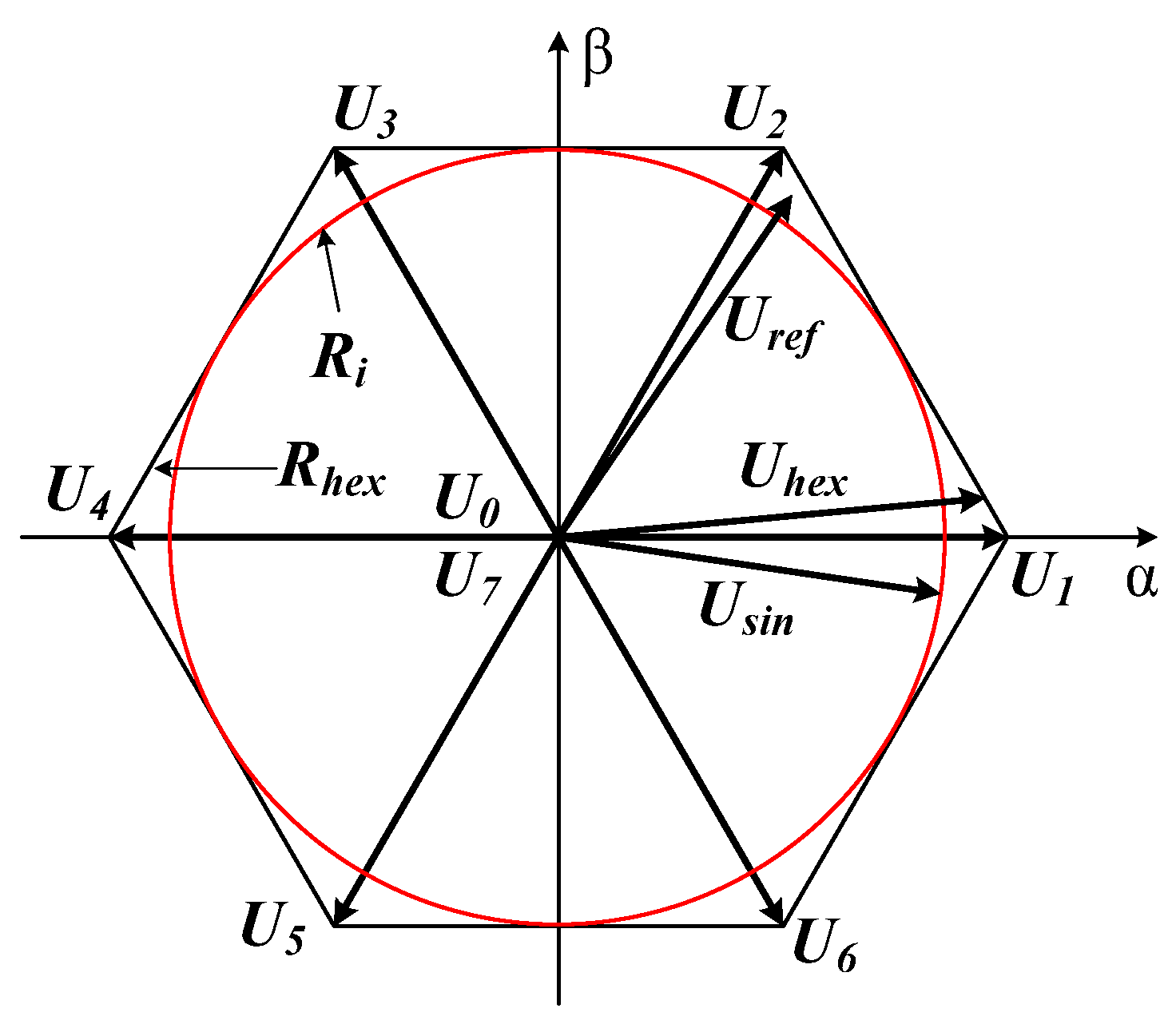
4.1. Hexagon Vector
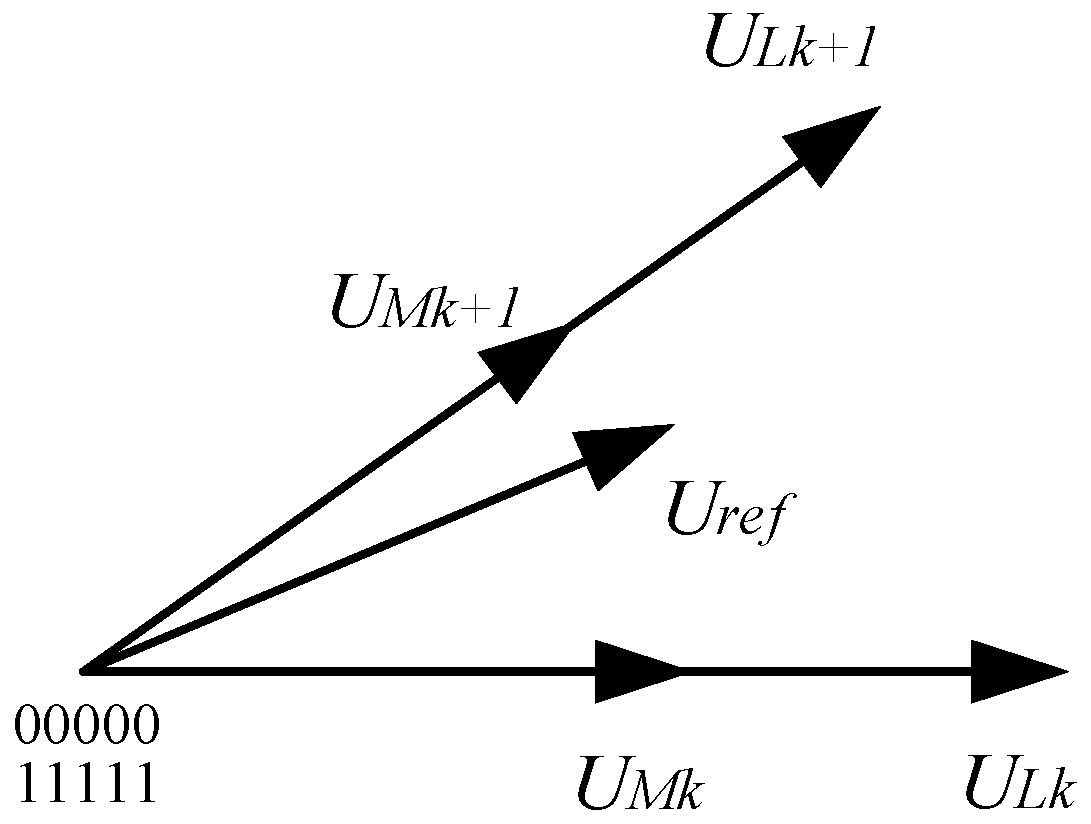
4.2. Operating Principle
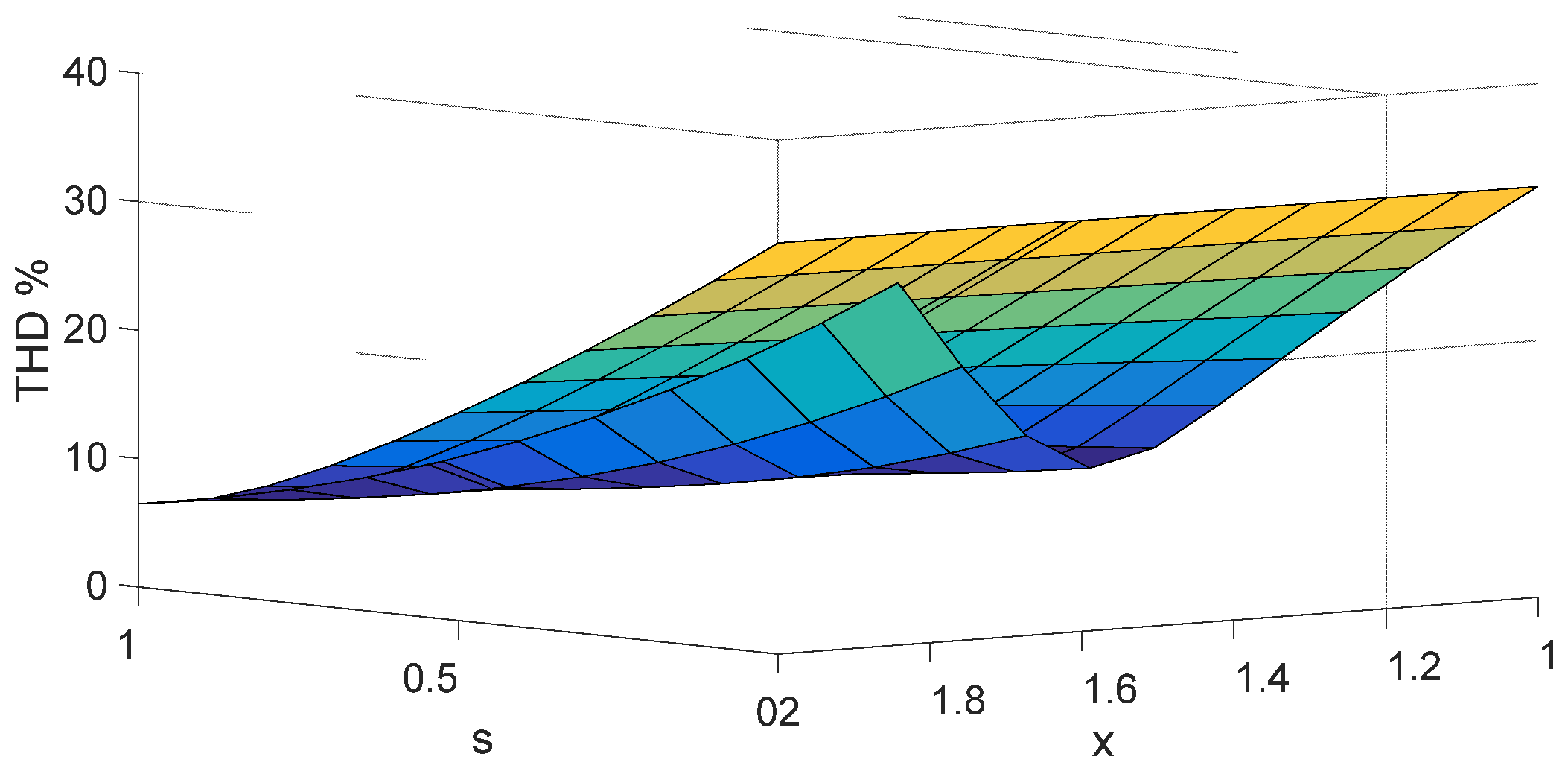
4.3. Harmonic Characteristic
5. Simulation Research and Experimental Verification
5.1. Simulation Results
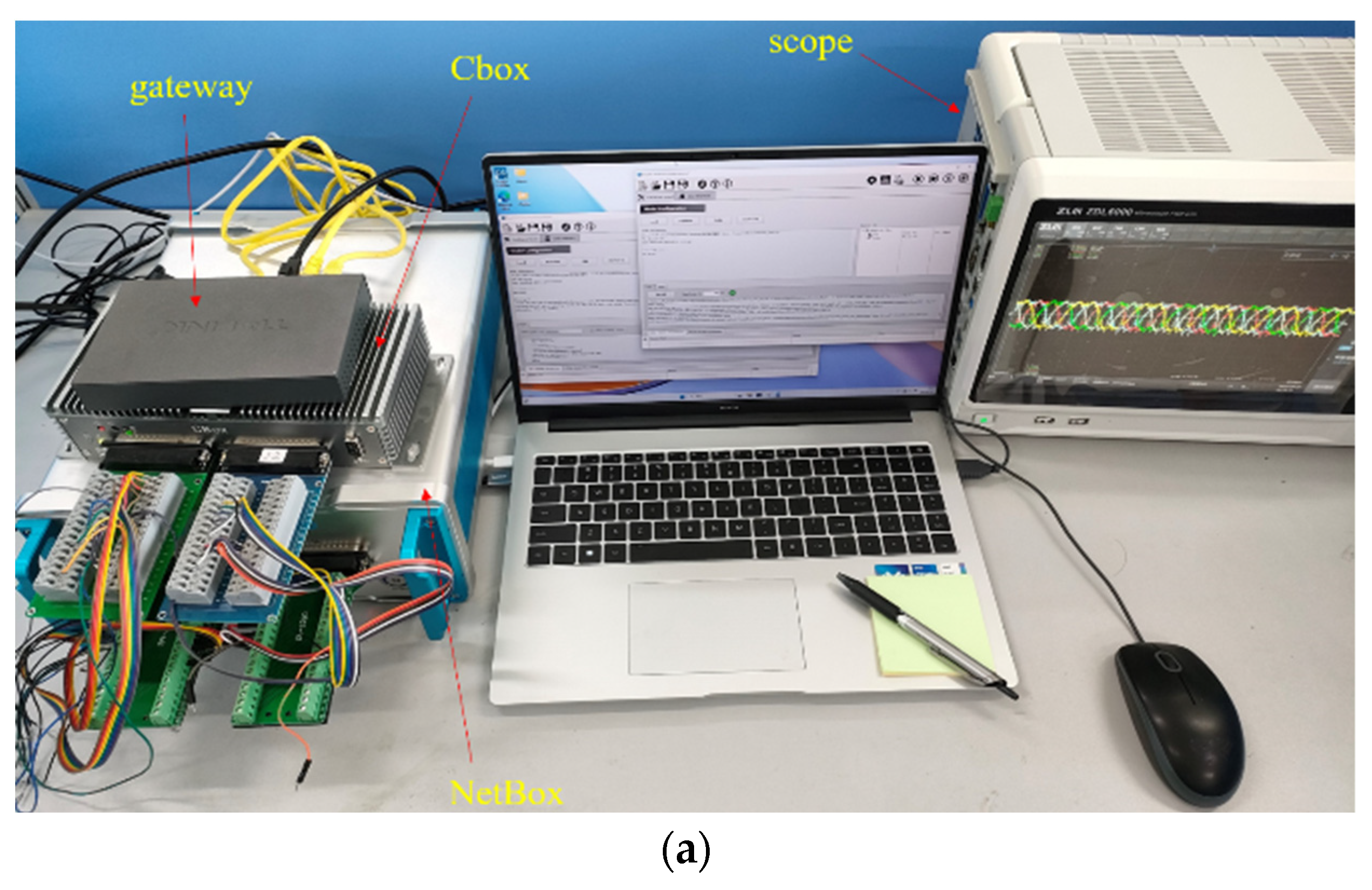
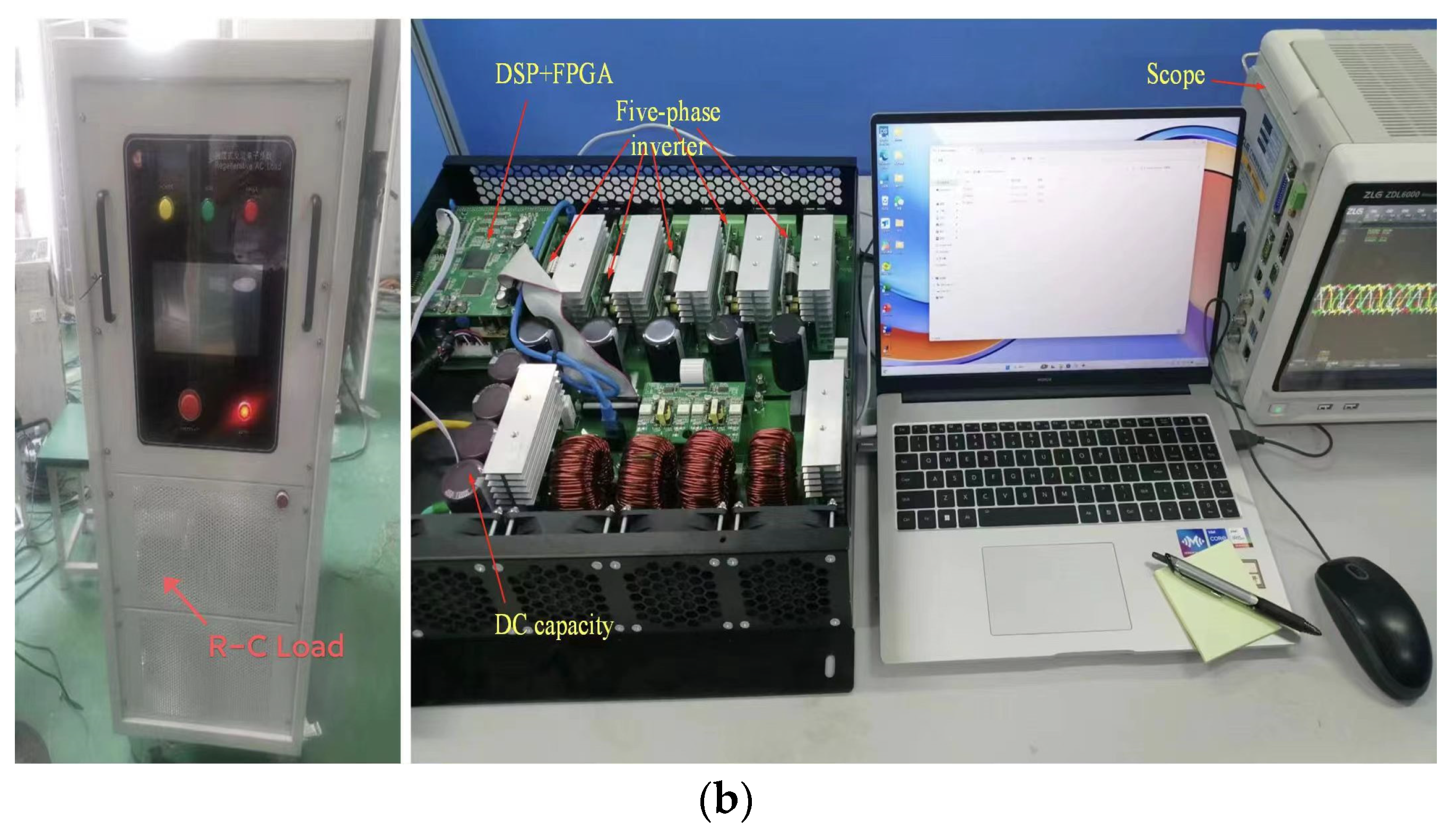
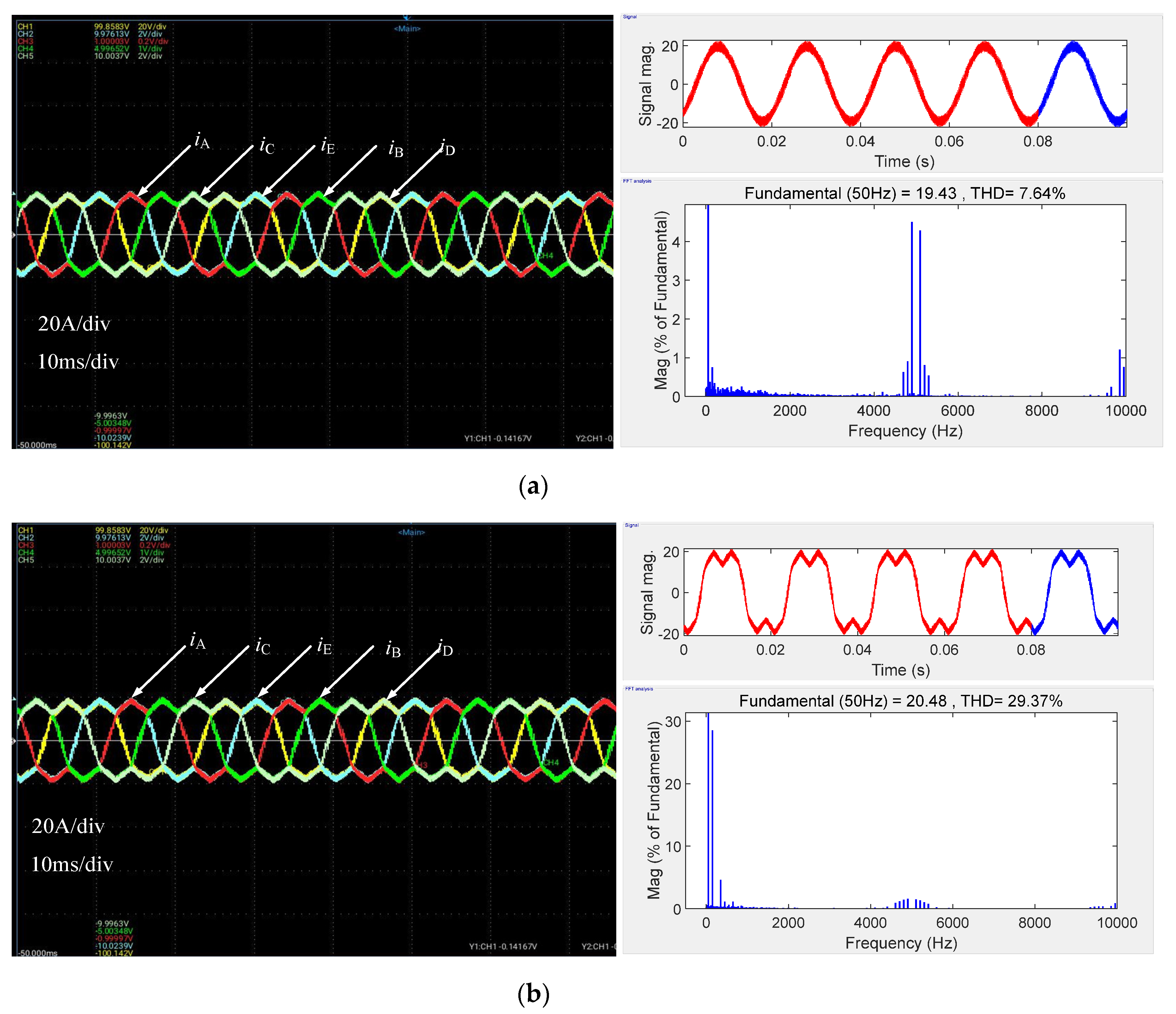
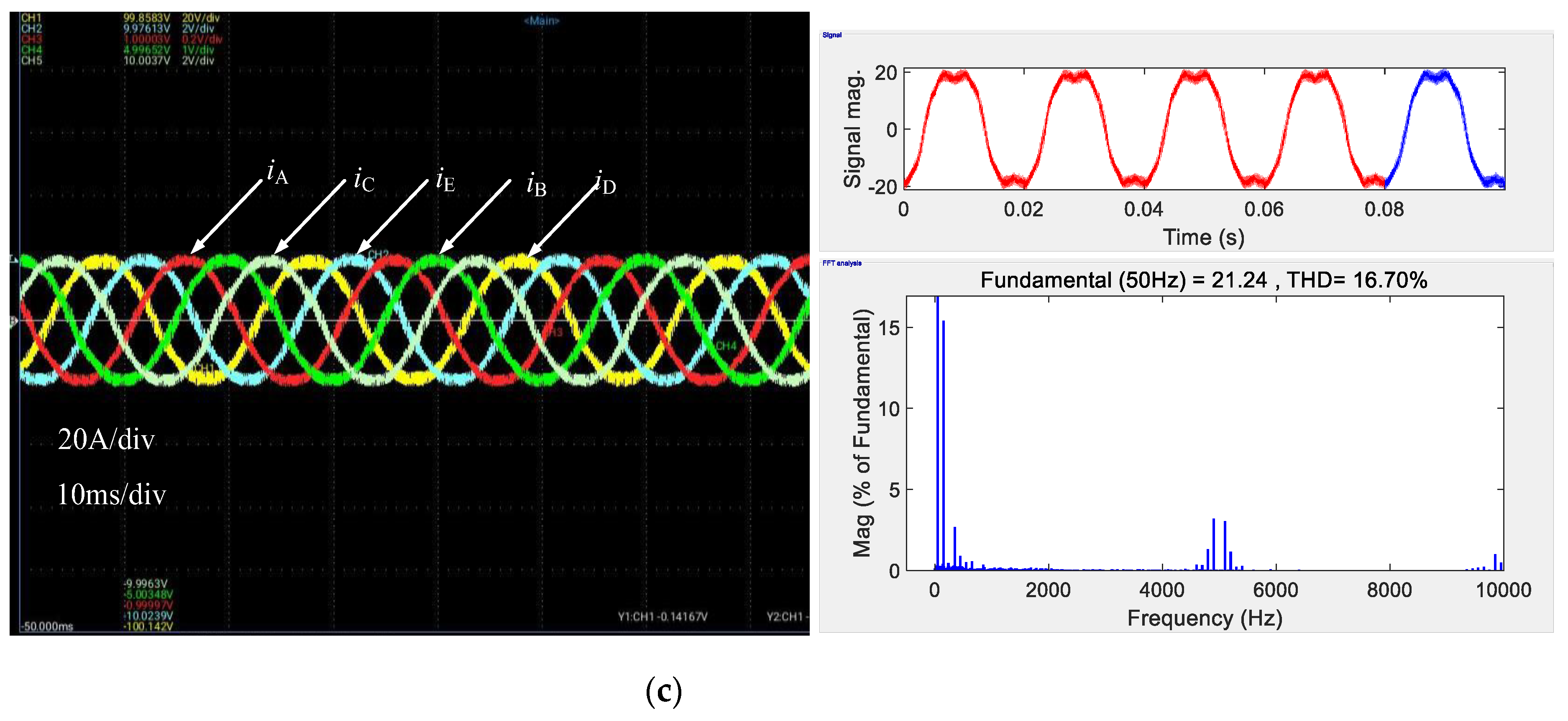
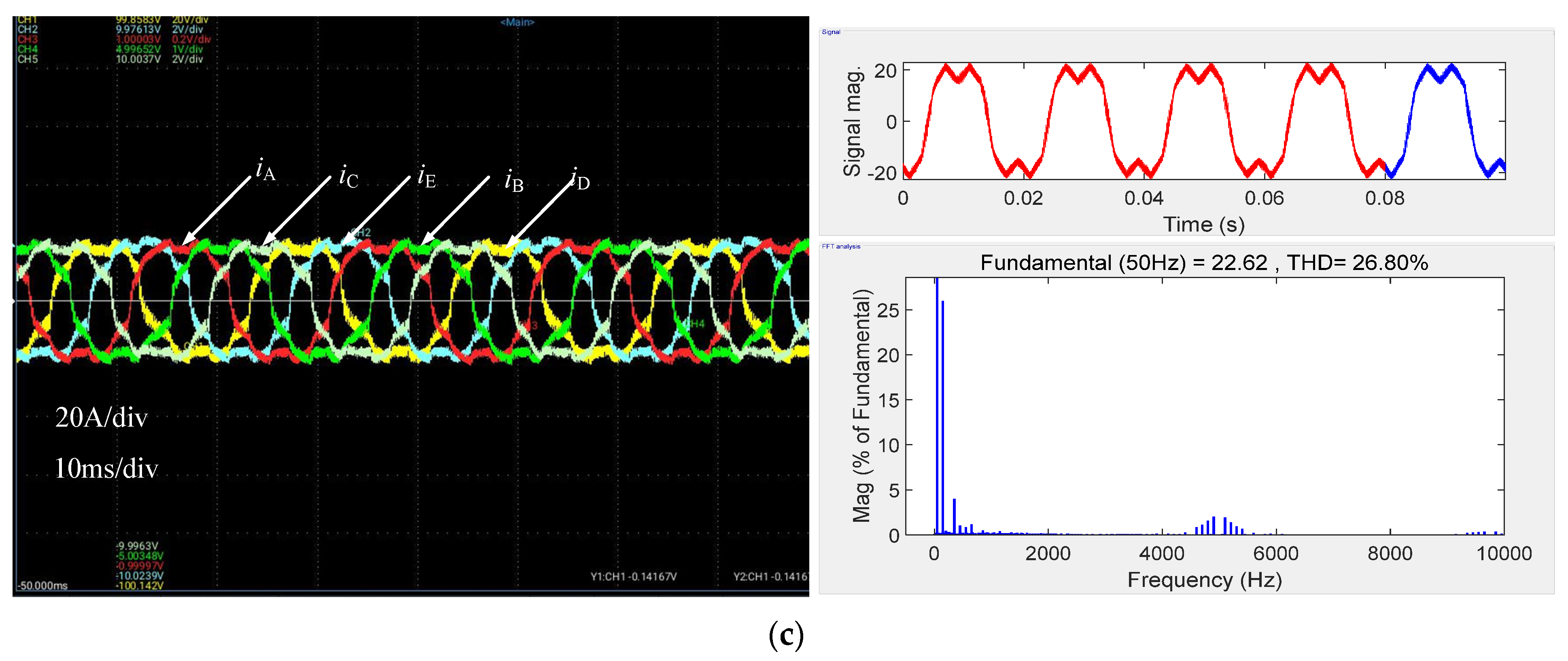
5.2. Experimental Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ma, W.; Wang, D.; Cheng, S.; Chen, J. Common basic scientific problems and development of leading-edge technology of high performance motor system. Proc. CSEE 2016, 36, 2025–2035. (In Chinese) [Google Scholar]
- Levi, E. Advances in converter control and innovative exploitation of additional degrees of freedom for multiphase machines. IEEE Trans. Ind. Electron. 2016, 63, 433–448. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent advances in the design, modeling, and control of multiphase machines—Part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Tao, T.; Zhao, W.X.; Cheng, M.; Wang, Z. Review on fault-tolerant control of multi-phase machines and their key technologies. Proc. CSEE 2019, 39, 316–326. (In Chinese) [Google Scholar]
- Tian, B.; Mirzaeva, G.; An, Q.T.; Sun, L.; Semenov, D. Fault-tolerant control of a five-phase permanent magnet synchronous motor for industry applications. IEEE Trans. Ind. Appl. 2018, 54, 3943–3952. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Y.; Zheng, Z. Control and drive techniques for multiphase machines: A review. Trans. China Electrotech. Soc. 2017, 32, 17–29. [Google Scholar]
- Liu, Z.; Zheng, Z.; Li, Y. Enhancing fault-tolerant ability of a nine-phase induction motor drive system using fuzzy logic current controllers. IEEE Trans. Energy Convers. 2017, 32, 759–769. [Google Scholar] [CrossRef]
- Zhu, P.; Zhang, X.; Qiao, M.; Zhang, C.; Cai, W. Five-phase induction motor SVM-DTC strategies with third harmonic voltage injection. Electr. Mach. Control 2010, 14, 13–18. [Google Scholar]
- Bermúdez, M.; Gonzalez, P.I.; Barrero, F.; Guzman, H.; Duran, M.J.; Kestelyn, X. An experimental assessment of open-phase fault-tolerant virtual-vector-based direct torque control in five-phase induction motor drives. IEEE Trans. Power Electron. 2018, 33, 2774–2784. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, B.; Zhang, P. Techniques to restrain harmonics of dual three-phase permanent magnet synchronous motor. Electr. Mach. Control 2015, 19, 23–28. [Google Scholar]
- Zhu, P.; Zhang, X.; Qiao, M.; Cai, W.; Liang, J. Tolerant control strategy for five-phase concentrated full-pitch windings induction motor under open phases fault. Proc. CSEE 2011, 31, 131–137. [Google Scholar]
- Yu, F.; Zhang, X.; Li, H.; Song, Q. Space vector PWM control of five-phase inverter. Proc. CSEE 2005, 25, 40–46. [Google Scholar]
- Yu, F.; Zhang, X.; Li, H.; Xiang, D. Discontinuous space vector PWM control of five-phase inverter. Trans. China Electro Tech. Soc. 2006, 21, 26–30. [Google Scholar]
- Tang, J.; Wang, T.; Cuii, S.M. Implementation method of SVPWM for five-phase inverters. Trans. China Electro Tech. Soc. 2013, 28, 64–72. [Google Scholar]
- Meng, F.; Zhang, C. Research on space vector control strategy based on five-phase five-level H-bridge inverter. Appl. Sci. Technol. 2017, 44, 43–47. [Google Scholar]
- Xue, C.; Song, W.; Wu, X.; Feng, X. A constant switching frequency finite-control-set predictive current control scheme of a five-phase inverter with duty-ratio optimization. IEEE Trans. Power Electron. 2018, 33, 3583–3594. [Google Scholar] [CrossRef]
- Iqbal, A.; Abu-Rub, H.; Cortes, P.; Rodriguez, J. Finite control set model predictive current control of a five-phase voltage source inverter. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Via del Mar, Chile, 14–17 March 2010; pp. 1787–1792. [Google Scholar]
- Cortés, P.; Vattuone, L.; Rodriguez, J.; Duran, M. A method of predictive current control with reduced number of calculations for five-phase voltage source inverters. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 53–58. [Google Scholar]
- Zhou, C.; Yang, G.; Su, J. PWM strategy with minimum harmonic distortion for dual three-phase permanent-magnet synchronous motor drives operating in the overmodulation region. IEEE Trans. Power Electron. 2016, 31, 1367–1380. [Google Scholar] [CrossRef]
- Komrska, T.; Glasberger, T.; Peroutka, Z. Universal PWM modulator for multiphase drives with a minimum infinity-norm approach. IEEE Trans. Ind. Electron. 2016, 63, 5979–5987. [Google Scholar] [CrossRef]
- Priestley, M.; Fletcher, J.E. Space-vector PWM technique for five phase open-end winding PMSM drive operating in the overmodulation region. IEEE Trans. Ind. Electron. 2018, 65, 6816–6827. [Google Scholar] [CrossRef]
- Vancini, L.; Mengoni, M.; Rizzoli, G.; Sala, G.; Zarri, L.; Tani, A. Carrier-Based PWM Overmodulation Strategies for Five-Phase Inverters. IEEE Trans. Power Electron. 2021, 36, 6988–6999. [Google Scholar] [CrossRef]
- Liu, H.; Yi, X.; Wang, D.; Zheng, X.; Meng, F. An Efficiency-optimized Control Strategy in the Full Torque Operation Range for Five-phase Induction Motor under Open-circuited Fault Conditions. Proc. CSEE 2020, 40, 1642–1652. [Google Scholar]
- Peng, Z.; Zheng, Z.; Liu, Z. A novel sensorless fault-tolerant control of five-phase induction machine using virtual winding and full-order observer. Trans. China Electrotech. Soc. 2018, 33, 4949–4961. [Google Scholar]
- Pu, T. Research on Novel Space Vector Pulse Width Modulation Technique for Five-Phase Inverter. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2020. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Vector | Amplitude | |
|---|---|---|
| Large Vector | U3, U6, U7, U12, U14, U17, U19, U24, U25, U28 | |
| Medium Vector | U1, U2, U4, U8, U15, U16, U23, U27, U29, U30 | |
| Small Vector | U5, U9, U10, U11, U13, U18, U20, U21, U22, U26 |
| Parameter | Value |
|---|---|
| DC Voltage/DC Capacitance | 750 V/4700 uF |
| Output Voltage/Frequency | 380 V/50 Hz |
| R-L Load | R = 20 Ω, L = 5 mH |
| Switching Frequency fs | 5 kHz |
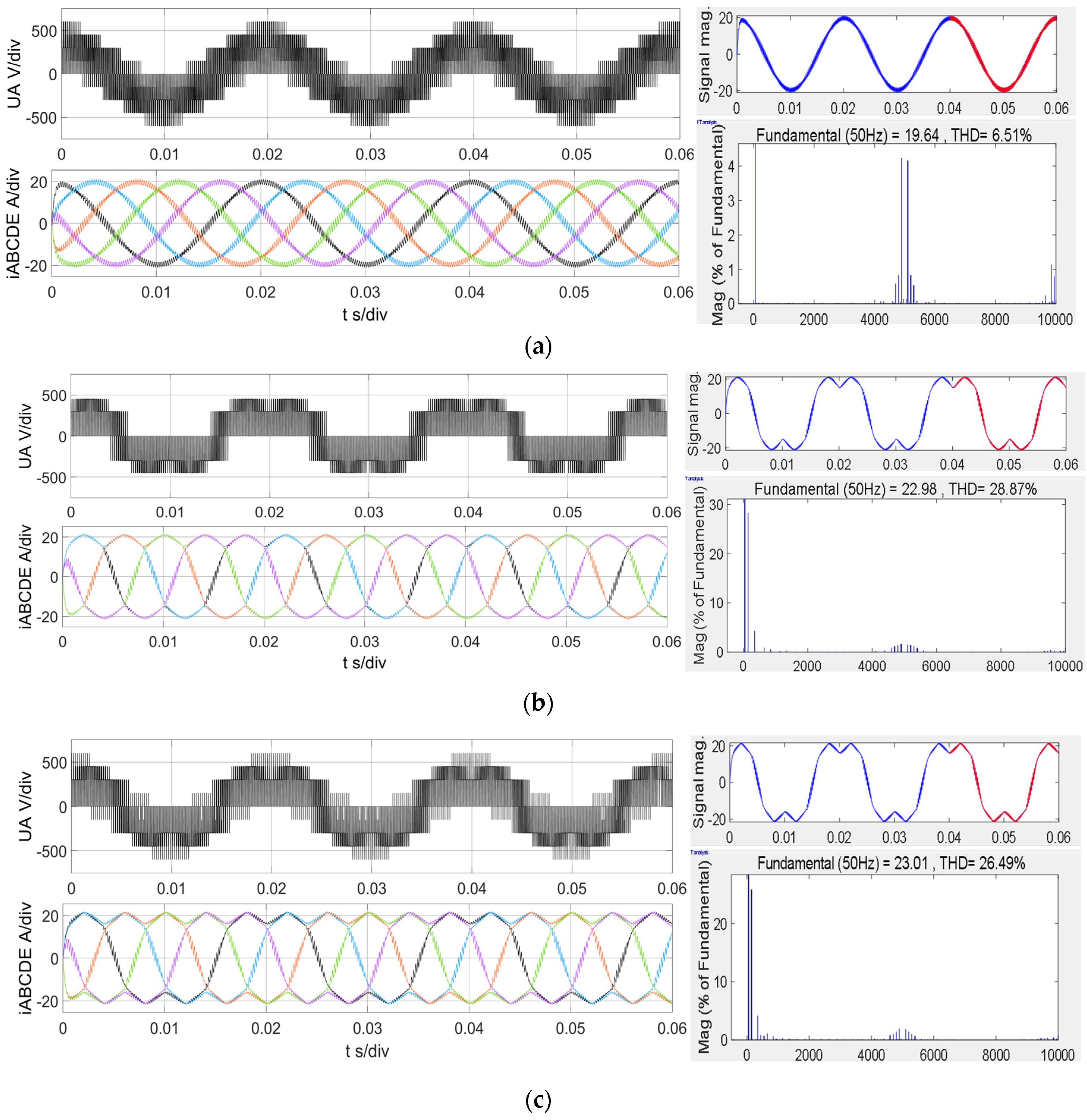
| Modulation Ratio (M) | NFV-SVPWM Method | Proposed Method | NTV-SVPWM Method |
|---|---|---|---|
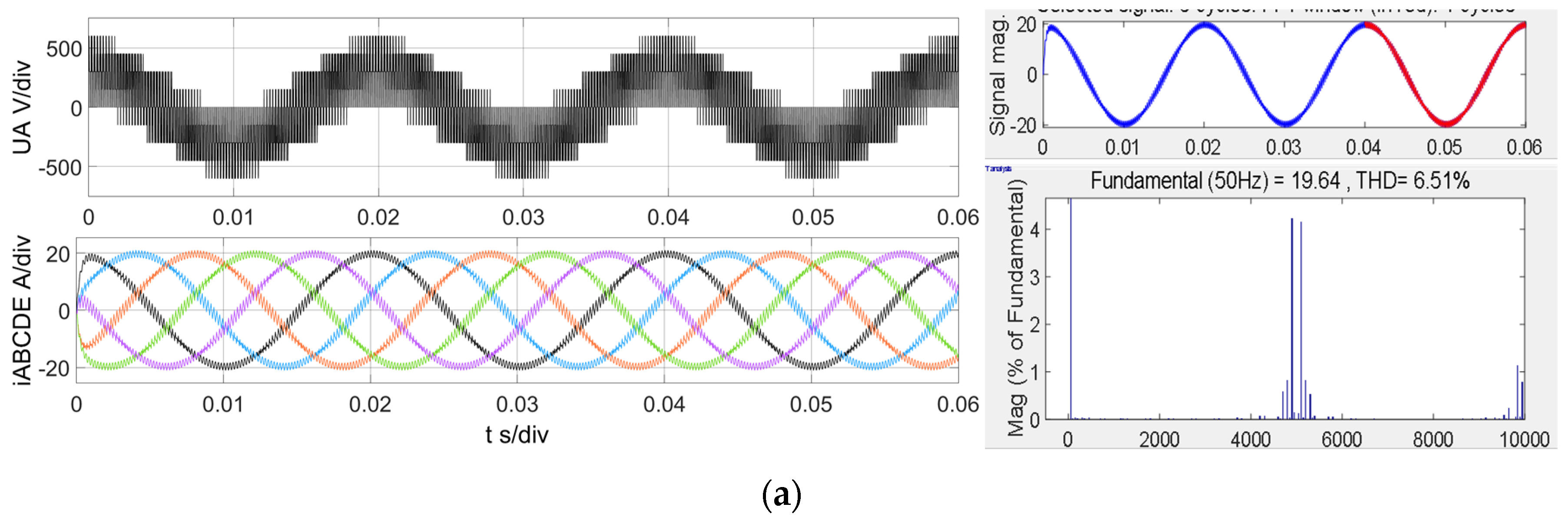
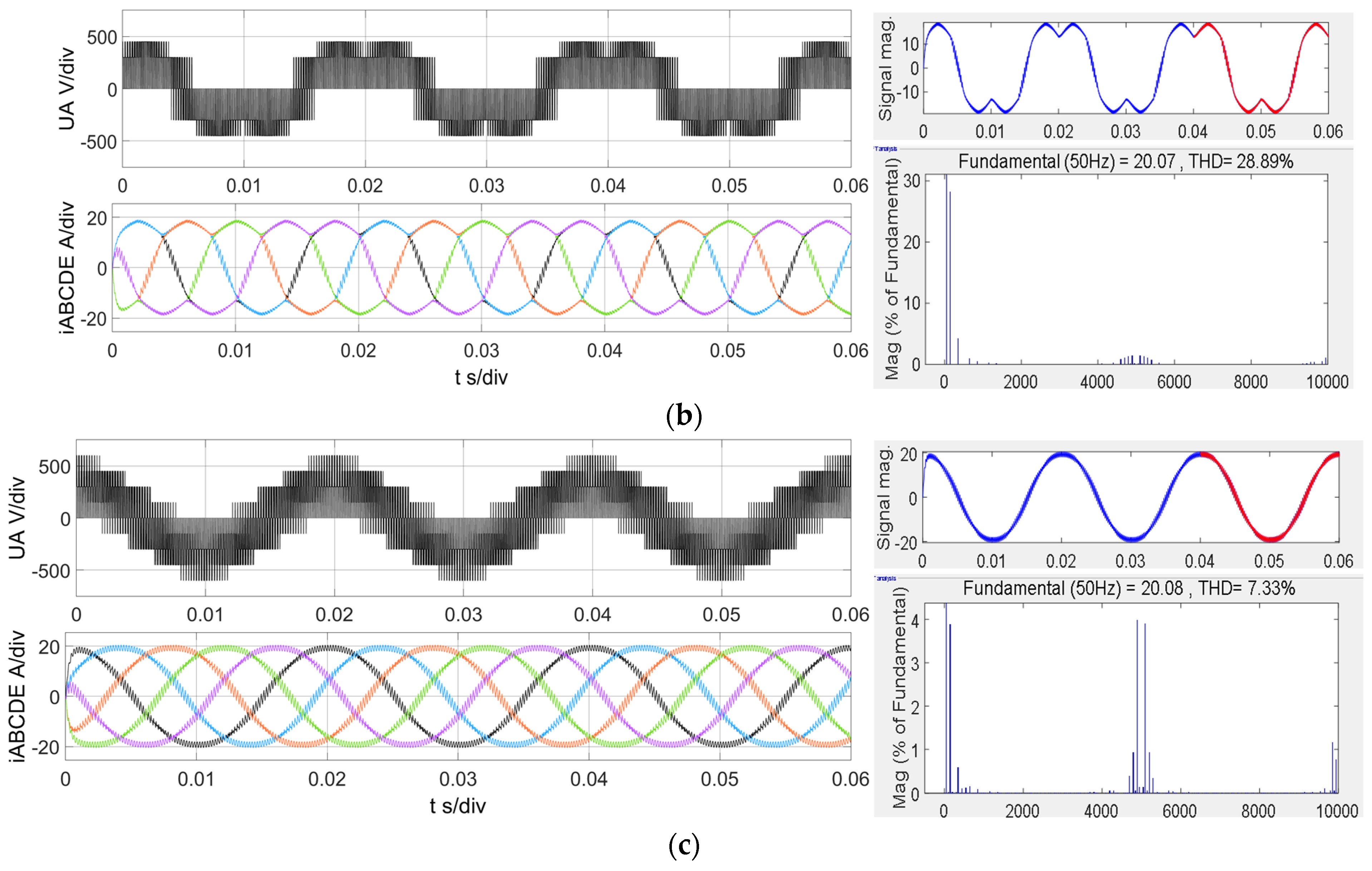
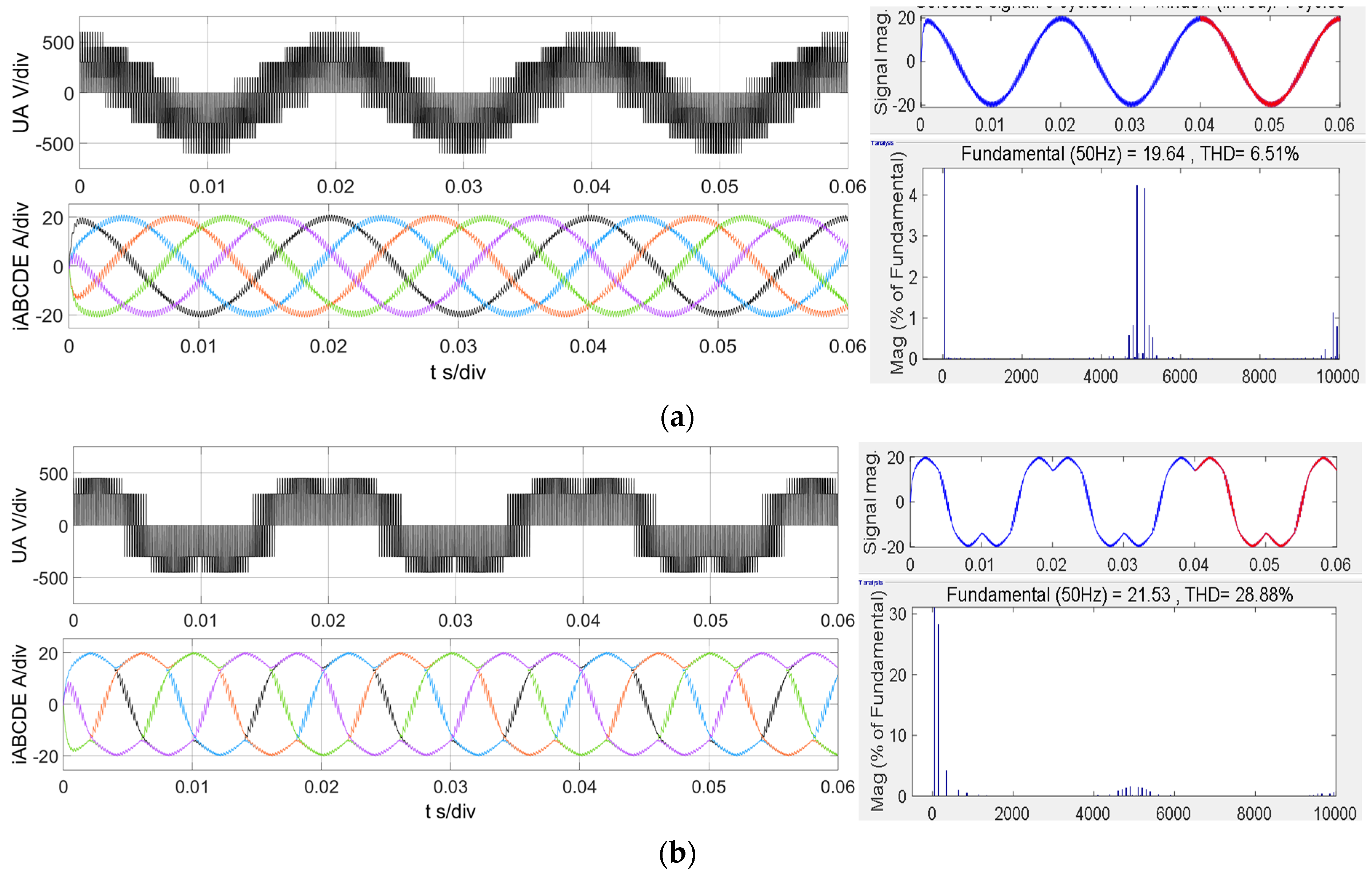
| 0.83 | 6.51% | 7.33% | 28.89% |
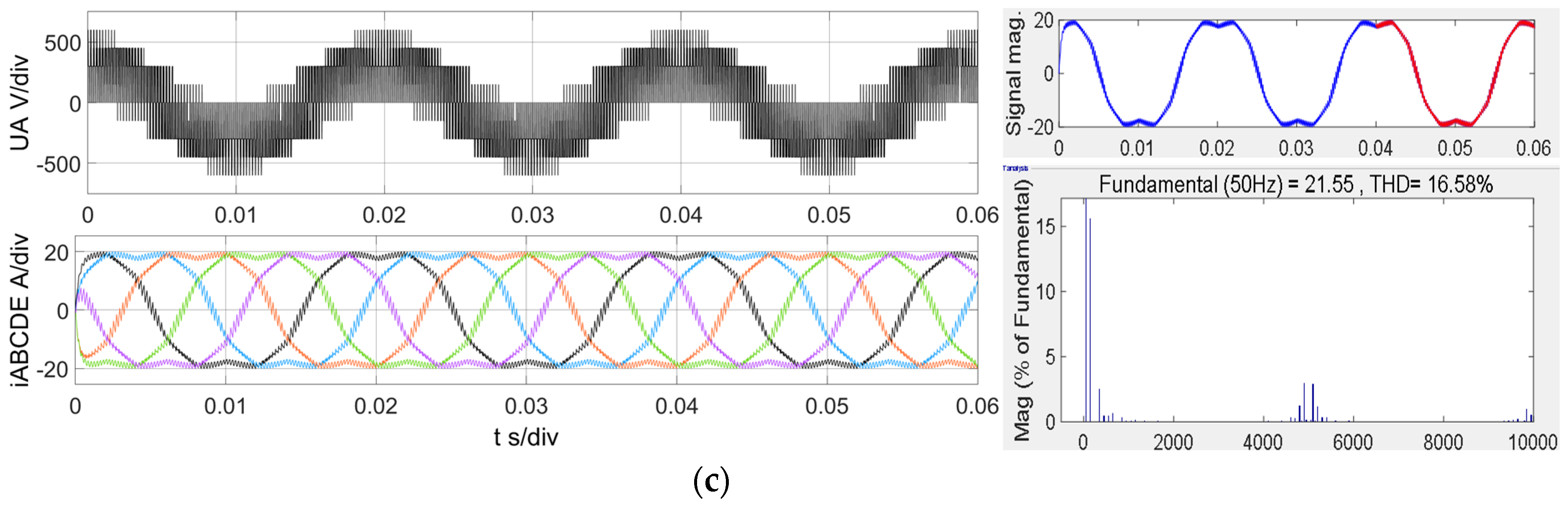
| 0.89 | 6.51% | 16.58% | 28.88% |
| 0.95 | 6.51% | 26.49% | 28.87% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, Y.; Jing, M.; Ma, Y. A Space Vector Modulation Strategy for Improving Voltage Transfer Ratio of Multi-Phase Inverter. Electronics 2024, 13, 1907. https://doi.org/10.3390/electronics13101907
Xia Y, Jing M, Ma Y. A Space Vector Modulation Strategy for Improving Voltage Transfer Ratio of Multi-Phase Inverter. Electronics. 2024; 13(10):1907. https://doi.org/10.3390/electronics13101907
Chicago/Turabian StyleXia, Yihui, Mingchen Jing, and Yuanzheng Ma. 2024. "A Space Vector Modulation Strategy for Improving Voltage Transfer Ratio of Multi-Phase Inverter" Electronics 13, no. 10: 1907. https://doi.org/10.3390/electronics13101907
APA StyleXia, Y., Jing, M., & Ma, Y. (2024). A Space Vector Modulation Strategy for Improving Voltage Transfer Ratio of Multi-Phase Inverter. Electronics, 13(10), 1907. https://doi.org/10.3390/electronics13101907