
A Nonparametric Regression-Based Multi-Scale Gradient Correlation Filtering Method for Infrared Small Target Detection



Abstract
:1. Introduction
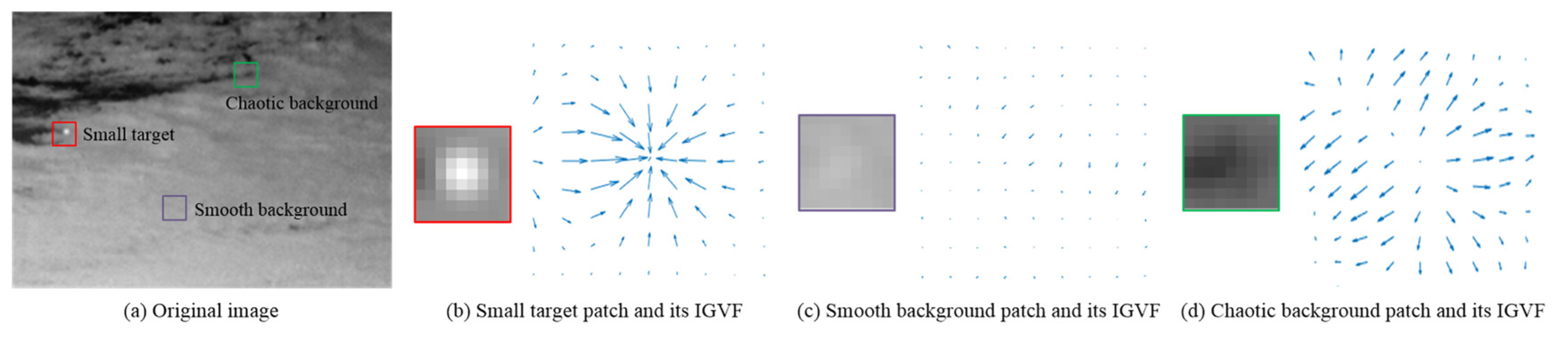
- A nonparametric regression method is proposed to calculate the IGVF.
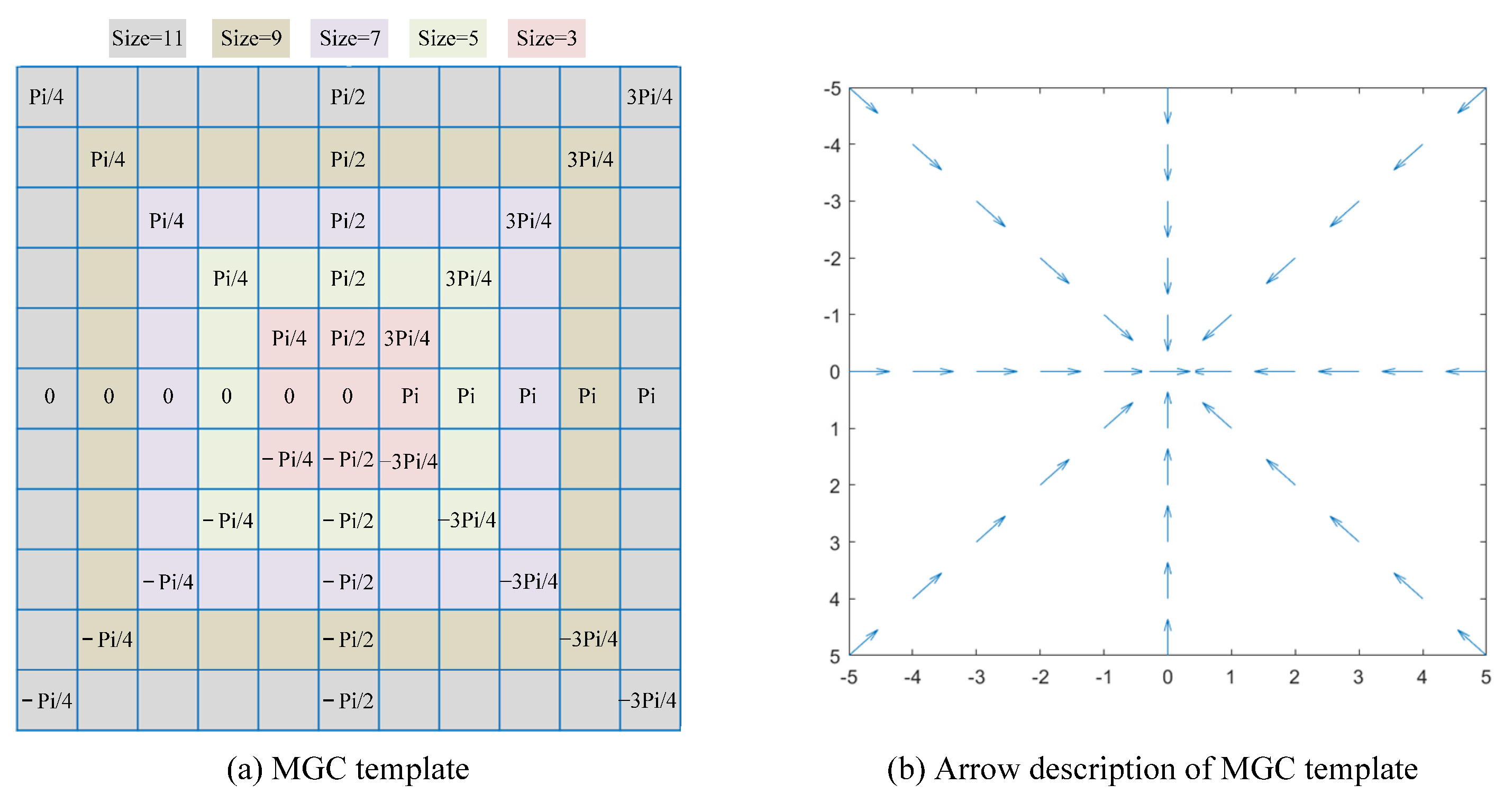
- A multi-scale gradient correlation (MGC) template is designed and a multi-scale gradient correlation filtering method is proposed to discriminate between the small target and clutter.
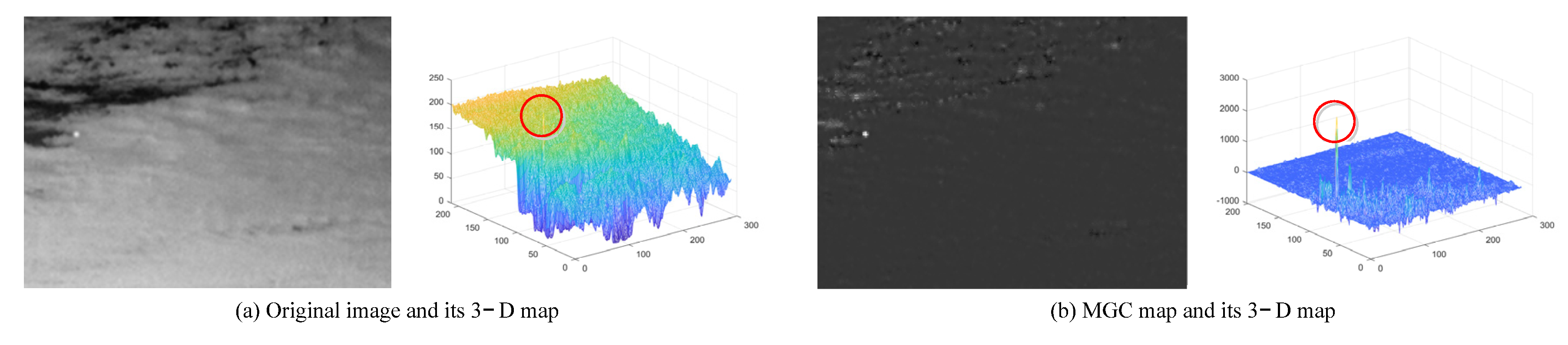
- The proposed method exhibits excellent small target detection performance, especially in low SCR and dense cloud scenes.
2. Related Work
3. The Proposed MGCF Method
3.1. IGVF Construction Method Based on Nonparametric Regression
3.2. The Proposed MGCF Method
3.3. Small Target Extraction Based on the Adaptive Threshold
- Step 1: Calculate the IGVF map based on a nonparametric regression method, according to (1)–(13).
- Step 2: Calculate the module map and direction map according to (14)–(15).
- Step 3: Calculate the gradient correlation based on the designed MGC template with the IGVF map in a fix scale, according to (16)–(17). After that, a GC map within a fix scale is obtained.
- Step 4: Find the maximum value of gradient correlation response under multiple scales, according to (18).
- Step 5: Set an adaptive threshold on the MGC map to extract the infrared small target, according to (19).
4. Experimental Results and Analysis
4.1. Main Results of the Proposed MGCF Method
4.2. Evaluation Metrics and Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Philip Chen, C.; Li, H.; Wei, Y.; Xia, T.; Tang, Y. A local contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Liu, D.P.; Cao, L.; Li, Z.Z.; Liu, T.M.; Che, P. Infrared Small Target Detection Based on Flux Density and Direc-tion Diversity in Gradient Vector Field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2528–2554. [Google Scholar] [CrossRef]
- Zeng, M.; Li, J.; Peng, Z. The design of top-hat morphological filter and application to infrared target detection. Infrared Phys. Technol. 2006, 48, 67–76. [Google Scholar] [CrossRef]
- Deshpande, S.; Er, M.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small-targets. Proc. SPIE 1999, 3809, 74–83. [Google Scholar]
- Deng, L.Z.; Zhang, J.K.; Xu, G.X.; Zhu, H. Infrared small target detection via adaptive M-estimator ring top-hat transformation. Pattern Recogn. 2021, 112, 107729. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Ding, Q.H.; Luo, H.B.; Hui, B.; Chang, Z.; Zhang, J.C. Infrared small target detection based on directional zero-crossing measure. Infrared Phys. Technol. 2017, 87, 113–123. [Google Scholar] [CrossRef]
- Lu, R.T.; Yang, X.G.; Li, W.P.; Fan, J.W.; Li, D.L.; Jing, X. Robust infrared small target detection via multidirectional derivative-based weighted contrast measure. IEEE Geosci. Remote Sens. Lett. 2022, 19, 7000105. [Google Scholar] [CrossRef]
- Chen, Y.H.; Zhang, G.P.; Ma, Y.J.; Kang, J.U.; Kwan, C. Small infrared target detection based on fast adaptive masking and scaling with iterative segmentation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 7000605. [Google Scholar] [CrossRef]
- Wu, L.; Fang, S.H.; Ma, Y.; Fan, F.; Huang, J. Infrared small target detection based on gray intensity descent and local gradient watershed. Infrared Phys. Technol. 2022, 123, 104171. [Google Scholar] [CrossRef]
- Zhang, M.; Dong, L.L.; Zheng, H.; Xu, W.H. Infrared maritime small target detection based on edge and local intensity features. Infrared Phys. Technol. 2021, 119, 103940. [Google Scholar] [CrossRef]
- Nie, J.Y.; Qu, S.C.; Wei, Y.T.; Zhang, L.M.; Deng, L.Z. An infrared small target detection method based on multiscale local homogeneity measure. Infrared Phys. Technol. 2018, 90, 186–194. [Google Scholar] [CrossRef]
- Song, Q.; Wang, Y.H.; Dai, K.H.; Bai, K. Single frame infrared image small target detection via patch similarity propagation based background estimation. Infrared Phys. Technol. 2020, 106, 103197. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A. Infrared patch image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Dai, Y.M.; Wu, Y.Q.; Song, Y.; Guo, J. Non-negative infrared patch-image model: Robust target-background separation via partial sum minimization of singular values. Infrared Phys. Technol. 2017, 81, 182–194. [Google Scholar] [CrossRef]
- Li, W.; Zhao, M.J.; Deng, X.Y.; Li, L.; Li, L.W.; Zhang, W.J. Infrared Small Target Detection Using Local and Nonlocal Spatial Information. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3677–3689. [Google Scholar] [CrossRef]
- Zhu, H.; Ni, H.P.; Liu, S.M.; Xu, G.X.; Deng, L.Z. TNLRS: Target-Aware Non-Local Low-Rank Modeling With Saliency Filtering Regularization for Infrared Small Target Detection. IEEE Trans. Image Process. 2020, 29, 9546–9558. [Google Scholar] [CrossRef]
- Rawat, S.S.; Verma, S.K.; Kumar, Y.; Kumar, G. Infrared small target detection based on non-convex Lp-norm minimization. Math. Eng. Sci. Aerosp. 2021, 12, 1–14. [Google Scholar]
- Rawat, S.S.; Alghamdi, S.; Kumar, G.; Alotaibi, Y.; Khalaf, O.I.; Verma, L.P. Infrared Small Target Detection Based on Partial Sum Minimization and Total Variation. Mathematics 2022, 10, 671. [Google Scholar] [CrossRef]
- Rawat, S.S.; Singh, S.; Alotaibi, Y.; Alghamdi, S.; Kumar, G. Infrared Target-Background Separation Based on Weighted Nuclear Norm Minimization and Robust Principal Component Analysis. Mathematics 2022, 10, 2829. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Ding, Q.H.; Luo, H.B.; Hui, B.; Chang, Z.; Zhang, J.C. Infrared small target detection based on an image-patch tensor model. Infrared Phys. Technol. 2019, 99, 55–63. [Google Scholar] [CrossRef]
- Luo, Y.; Li, X.R.; Chen, S.H.; Xia, C.Q.; Zhao, L.Y. IMNN-LWEC: A Novel Infrared Small Target Detection Based on Spatial–Temporal Tensor Model. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5004022. [Google Scholar] [CrossRef]
- Han, J.H.; Ma, Y.; Zhou, B.; Fan, F.; Liang, K.; Fang, Y. A robust infrared small target detection algorithm based on human visual system. IEEE Geosci. Remote Sens. 2014, 11, 2168–2172. [Google Scholar]
- Shi, Y.F.; Wei, Y.T.; Yao, H.; Pan, D.H.; Xiao, G.R. High-Boost-Based Multiscale Local Contrast Measure for Infrared Small Target Detection. IEEE Geosci. Remote Sens. 2018, 15, 33–37. [Google Scholar] [CrossRef]
- Yi, X.; Wang, B.J.; Zhou, H.X.; Qin, H.L. Dim and small infrared target fast detection guided by visual saliency. Infrared Phys. Technol. 2019, 97, 6–14. [Google Scholar] [CrossRef]
- Han, J.H.; Moradi, S.; Faramarzi, I.; Zhan, H.H.; Zhao, Q.; Zhang, X.J.; Li, N. Infrared Small Target Detection Based on the Weighted Strengthened Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1670–1674. [Google Scholar] [CrossRef]
- Li, Z.H.; Liao, S.Y.; Zhao, T. Infrared Dim and Small Target Detection Based on Strengthened Robust Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2021, 19, 7506005. [Google Scholar] [CrossRef]
- Qin, Y.; Bruzzone, L.; Gao, C.Q.; Li, B. Infrared Small Target Detection Based on Facet Kernel and Random Walker. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7104–7118. [Google Scholar] [CrossRef]
- Du, S.Y.; Wang, K.W.; Cao, Z.G. From characteristic response to target edge diffusion: An approach to small infrared target detection. Infrared Phys. Technol. 2022, 24, 104214. [Google Scholar] [CrossRef]
- He, S.; Xie, Y.N.; Yang, Z.W. High-boost-based local Weber contrast method for infrared small target detection. Remote Sens. Lett. 2023, 14, 103–113. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, C.; Liu, B.; Zhang, Y. A kernel-based nonparametric regression method for clutter removal in infrared small-target detection applications. IEEE Geosci. Remote Sens. Lett. 2010, 7, 469–473. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Ru, J.Y.; Wu, C.D. An Infrared Small Target Detection Method Based on Gradient Correlation Measure. IEEE Geosci. Remote Sens. Lett. 2022, 19, 7507605. [Google Scholar] [CrossRef]
- Hilliard, C.I. Selection of a clutter rejection algorithm for real-time target detection from an airborne platform. Proc. SPIE 2000, 4048, 74–84. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence 1 | Sequence 2 | Sequence 3 | Sequence 4 | Sequence 5 | Sequence 6 | |
|---|---|---|---|---|---|---|
| LCM | 2.8866 | 4.1496 | 1.5281 | 3.7841 | 7.5133 | 2.5293 |
| ILCM | 3.9644 | 11.9253 | 2.7618 | 27.6793 | 11.7564 | 7.8480 |
| MLHM | 6.2763 | 13.8237 | 5.2146 | 28.0575 | 15.3286 | 11.0568 |
| HB-MLCM | 5.8175 | 14.2563 | 6.5174 | 29.6812 | 14.1477 | 13.0805 |
| TDGS | 6.5844 | 16.8215 | 11.2475 | 34.0754 | 16.5291 | 16.3574 |
| PPF | 7.0428 | 14.4267 | 15.3578 | 35.4496 | 16.8865 | 15.7144 |
| Proposed | 7.5254 | 18.1034 | 13.6565 | 37.2877 | 18.2110 | 17.1263 |
| Sequence 1 | Sequence 2 | Sequence 3 | Sequence 4 | Sequence 5 | Sequence 6 | |
|---|---|---|---|---|---|---|
| LCM | 1.2467 | 1.1236 | 1.0659 | 0.8021 | 3.9277 | 0.9947 |
| ILCM | 1.9097 | 2.9447 | 1.8618 | 5.8491 | 5.0080 | 3.0302 |
| MLHM | 2.1193 | 4.5275 | 5.2364 | 7.7593 | 6.2163 | 4.1969 |
| HB-MLCM | 1.9842 | 4.3168 | 2.3187 | 8.8269 | 6.8497 | 5.3782 |
| TDGS | 2.4748 | 9.2534 | 3.5882 | 15.0752 | 7.3351 | 5.0860 |
| PPF | 2.1387 | 9.5821 | 4.6638 | 14.6297 | 8.0568 | 5.8293 |
| Proposed | 2.6641 | 11.0911 | 6.6090 | 18.4273 | 8.4615 | 6.2692 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Ru, J.; Wu, C. A Nonparametric Regression-Based Multi-Scale Gradient Correlation Filtering Method for Infrared Small Target Detection. Electronics 2023, 12, 1562. https://doi.org/10.3390/electronics12071562
Zhang X, Ru J, Wu C. A Nonparametric Regression-Based Multi-Scale Gradient Correlation Filtering Method for Infrared Small Target Detection. Electronics. 2023; 12(7):1562. https://doi.org/10.3390/electronics12071562
Chicago/Turabian StyleZhang, Xiangyue, Jingyu Ru, and Chengdong Wu. 2023. "A Nonparametric Regression-Based Multi-Scale Gradient Correlation Filtering Method for Infrared Small Target Detection" Electronics 12, no. 7: 1562. https://doi.org/10.3390/electronics12071562
APA StyleZhang, X., Ru, J., & Wu, C. (2023). A Nonparametric Regression-Based Multi-Scale Gradient Correlation Filtering Method for Infrared Small Target Detection. Electronics, 12(7), 1562. https://doi.org/10.3390/electronics12071562