1. Introduction
Global climate change and the high consumption of fossil energy make “energy saving” an important goal in today’s home energy management. Nonintrusive load monitoring (NILM) is an important part of home energy management by obtaining bus load information from a single measurement point and using algorithms to analyze information about individual devices and customer consumption patterns. NILM was proposed by Hart [
1] in the early 20th century. The technology can be divided into four parts: event detection, data processing, load decomposition, and load identification. As the core task of NILM, load identification is implemented with advanced algorithms to accurately identify a category of loads based on human-input features or features extracted from electrical signals. The early research on load identification performance [
2,
3,
4] was usually degraded due to the early hardware and software limitations. Recently, the rapid development of deep learning has provided a new direction for load identification.
Feature extraction and classification are two main components of load identification, and deep learning has been widely used in such fields. The deep neural networks were first used in [
5] to solve the problem related to NILM. A rectangular network was constructed by combining the long and short-term memory networks (LSTM) and the denoising autoencoders (DAE). Davies et al. presented an automatic feature learning method by down-sampling high-frequency electrical data into four channels to achieve classification results by using a five-layer convolutional neural network (CNN) [
6]. Sequence-to-point, spatial, and channel attention mechanisms were combined in [
7] to construct a convolutional block attention model to learn target device features.
The objective of load identification is to categorize the load with the recognition of load electrical signals. The nature of load electrical signals is discretized time-series data. If the time-series data is transformed into an image using some sequence-to-image (seq2img) methods, the load identification problem can be treated as the image classification problem. Voltage–current (V-I) trajectory is commonly used to transform voltage and current data into images [
8,
9,
10]. Voltage is plotted versus current to reflect features of load electrical signals. However, the granularity and color information of images are usually missed in such a method, and features of raw data cannot be fully reflected. The recurrence graph (RG) is another seq2img method. The appliance recognition utilizing the recurrence graph technique and CNN was studied, and the weighted recurrent graph (WRG) generation was presented by given with one-cycle current and voltage in [
11]. It was shown that an image-like representation with more values can be produced by the WRG to improve appliance recognition performance. In [
12], the adaptive weighted recurrence graph (AWRG) was discussed to solve the problem of hyperparameter tuning. It is shown in [
13] that the unthresholded recurrence plots are able to work as feature inputs for a vast range of time series classification problems, and the voltage–current trajectory was transformed into two unthresholded recurrence plots. Then it was classified using a spatial pyramid pooling convolutional neural network in [
14]. The recurrence graph is helpful in transforming load electrical signals into images. However, the performance of such a method partly relies on the hyperparameters selection. The quality of the generated images can be affected by the selection of hyperparameters. The Gramian angular field (GAF) and the Markov transition field (MTF) were proposed in [
15] for encoding time series as images. The time series was represented in a polar coordinate system, and the Gramian matrix was calculated in GAF. Each element of the Gramian matrix was the cosine summation of angles. The MTF was developed to build the Markov matrix of quantile bins after discretization, and the information of the raw data can be encoded by continuously representing the Markov transformation probability and saving information in the time domain.
The above-mentioned seq2img methods may cause key feature loss of raw data. The overall performance of load identification would consequently be affected. For example, the normalization process of the raw data and the construction of pixel matrices when calculating the Gramian matrix may result in information loss of the amplitude feature and the phase feature. If no compensation is made for such information loss, the generated images will be less recognizable, confusion will be induced, and eventually, lead to the load identification error. Some studies have tried to solve this problem. An improved GAF was introduced in [
16] to add the amplitude feature to the generated images by multiplying the Gramian matrix with the mean value of the raw data. Li et al. [
17] proposed a time series image coding for current time-frequency multifeature fusion to improve the load identification accuracy by combining the Gramian angular summation field (GASF), Gramian angular difference field (GADF), MTF, and current spectrum. The experimental results on the PLAID and IDOUC datasets showed that the overall identification accuracy was improved to about 99.49% and 99.78%, respectively. Qu et al. [
18] constructed 2D load signatures, including building the weighted voltage–current (WVI) trajectory image, MTF image, and current spectral sequence-based GAF (I-GAF) image, then built a residual convolutional neural network with energy-normalization and squeeze-and-excitation blocks (EN-SE-RECNN) to perform electrical appliance recognition tasks and achieved good recognition performance on public datasets. Chen et al. [
19], respectively, corresponded three single-channel GAF images to the three channels in RGB color space to construct an RGB image as a load signature. Then, a fine-tuned AlexNet model was constructed for performing classification on the load signatures of various appliance loads. For this research, the load signature is constructed to improve the load identification performance. Yusen Zhang et al. proposed three methods, namely learnable recurrent graph (LRG), learnable Gramian matrix (LGM), and generative graph (GG), to transform the image encoding into a learnable process [
20]. They achieved experimental results superior to conventional methods using temporal convolutional networks (TCN) on public datasets. Hwan Kim et al. proposed a temporal bar graph to extract the inherent features from the aggregated power signals for efficient load identification [
21]. This method achieved higher F1 scores compared to previous methods on the UK-DALE and Tracebase datasets. However, like what has been discussed, the problem of confusion between similar loads is still not well solved. When the signals demonstrate similarity in shape but differ in amplitude and phase, since the amplitude and phase information are usually lost in the seq2img process, the load identification performance could be degraded. Furthermore, none of the aforementioned research conducted experiments on private datasets, so the applicability of their proposed NILM methods to specific application scenarios also requires further validation.
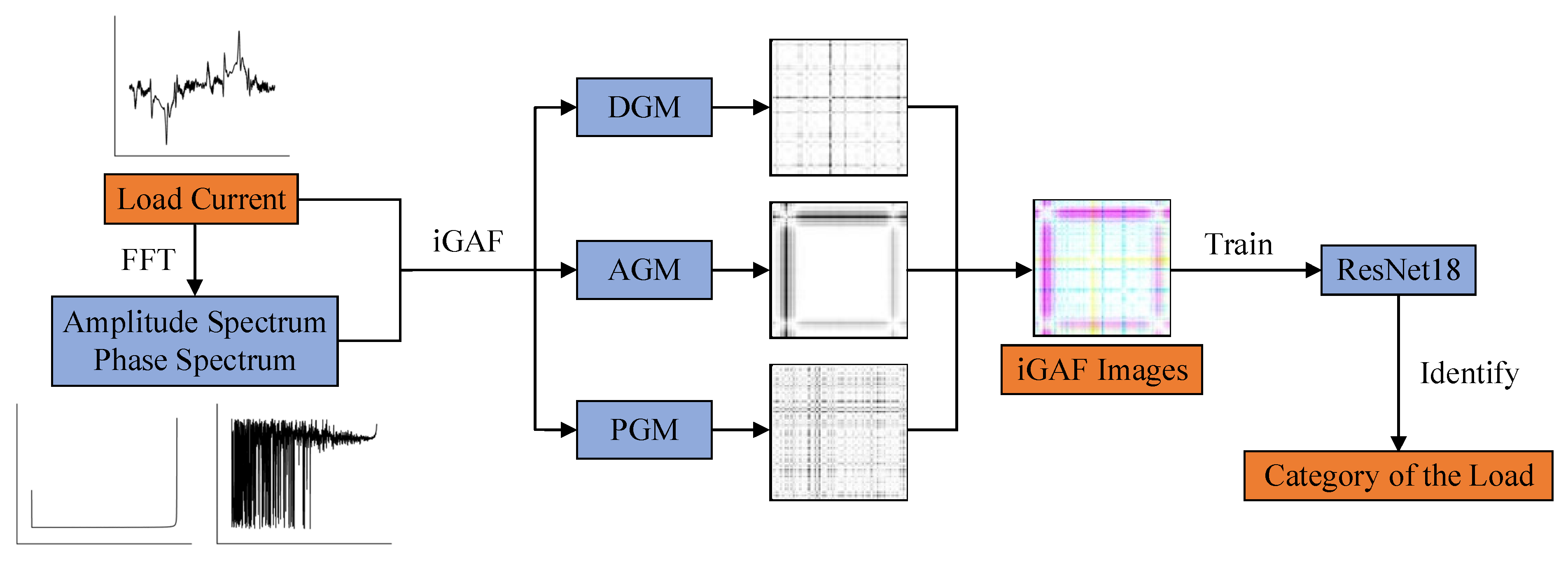
In this paper, a nonintrusive load identification method based on the improved Gramian angular field (iGAF) and ResNet18 is proposed to convert load current signals into improved images to offset the feature loss and thus improve the feature extraction and load identification accuracy. In the proposed method, the amplitude spectrum and phase spectrum of the load current signal are obtained by fast Fourier transform (FFT). The raw data Gramian matrix (DGM), amplitude Gramian matrix (AGM), and phase Gramian matrix (PGM) are, respectively, calculated based on the raw current signal, amplitude spectrum, and phase spectrum. These three matrices are conducted to preserve the amplitude feature and phase feature of the raw data that are usually missed in the existing seq2img methods. Then, the DGM, AGM, and PGM are, respectively, mapped to the three channels of the image to generate the iGAF images, and the ResNet18 is then trained with the iGAF images for load identification. Compared with the images generated by the existing methods, the pixel matrix of each channel of the iGAF image is reconstructed, and the amplitude feature and phase feature of the load current signal can be contained. Loads carrying similar current signals can be more accurately identified by the image classification model trained using iGAF images.
2. Proposed Method
2.1. Overall Scheme of the Improved Gramian Angular Field
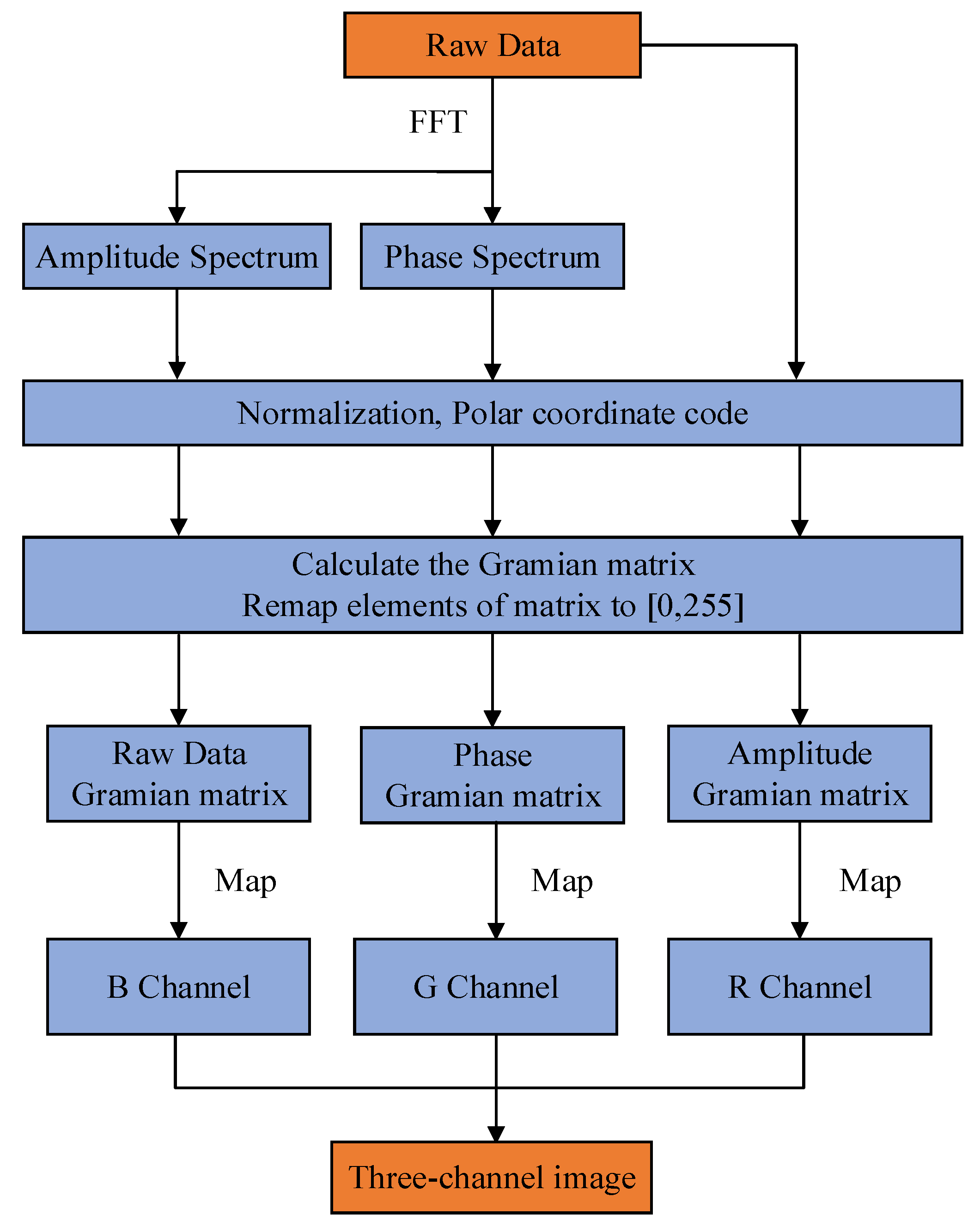
The improved Gramian angular field (iGAF), which is an improved seq2img method, is proposed, and the flowchart is shown in
Figure 1. The pixel matrices of the B channel, G channel, and R channel are reconstructed. The amplitude spectrum and phase spectrum of the load current signal are obtained using FFT, after which the DGM, AGM, and PGM are, respectively, calculated based on the load current signal, the amplitude spectrum, and the phase spectrum. Then, the calculated DGM, AGM, and PGM are mapped to the pixel matrices of the B channel, G channel, and R channel. Finally, the three channels are merged into a three-channel image, and thus the amplitude feature and phase feature can be added to the generated iGAF image.
2.2. Calculation of Amplitude Spectrum and Phase Spectrum
The FFT converts signals from the time domain to the frequency domain so that the amplitude, phase, and other information of the signals that are not easily observed in the time domain can be captured in the frequency domain [
22,
23,
24].
Let the raw data be a time-series vector
with
samples, and FFT is applied to obtain the real part sequence
and the imaginary part sequence
. The amplitude spectrum
and the phase spectrum
are calculated as follows:
2.3. Generation of iGAF Images
Before creating an iGAF representation, a 1D time-series vector
X with
samples is normalized to [0, 1] using (3), and the normalized data is converted into polar coordinates [
25]:
where
is the element of
,
is the element of the normalized time series
,
is the angle of the polar coordinates,
is the time stamp,
is the constant to adjust the span of the polar coordinate system, and
is the radius of the polar coordinates.
According to the trigonometric function used, two main types of GAF representations can be generated [
15]:
where
and
are the two kinds of Gramian matrix;
. The GAF images mainly show the temporal correlation between the pair of data points, along with preserving the temporal and spatial insights. The actual value and angular information have been contained in the main diagonal of the image texture. From (5) and (6), it can be seen that the size of the Gramian matrix is positively correlated with the length of the time series. To reduce the size of the Gramian matrix, piecewise aggregation approximation (PAA) [
26] is usually applied to smooth the time series while preserving the trends. The raw data Gramian matrix
, amplitude Gramian matrix
, and phase Gramian matrix
are defined as follows:
where
,
, and
denote the polar angle converted from each element of the raw data, the amplitude spectrum, and the phase spectrum, respectively.
.
Finally, values in
,
, and
are remapped to [0, 255] and assigned to the pixel matrices of the B channel, G channel, and R channel, respectively:
where
,
, and
are the pixel matrices of B channel, G channel, and R channel, respectively.
is the largest element of matrix
.
is the smallest element of
. Similarly,
is the largest element of matrix
.
is the smallest element of matrix
.
is the largest element of matrix
, and
is the smallest element of matrix
.
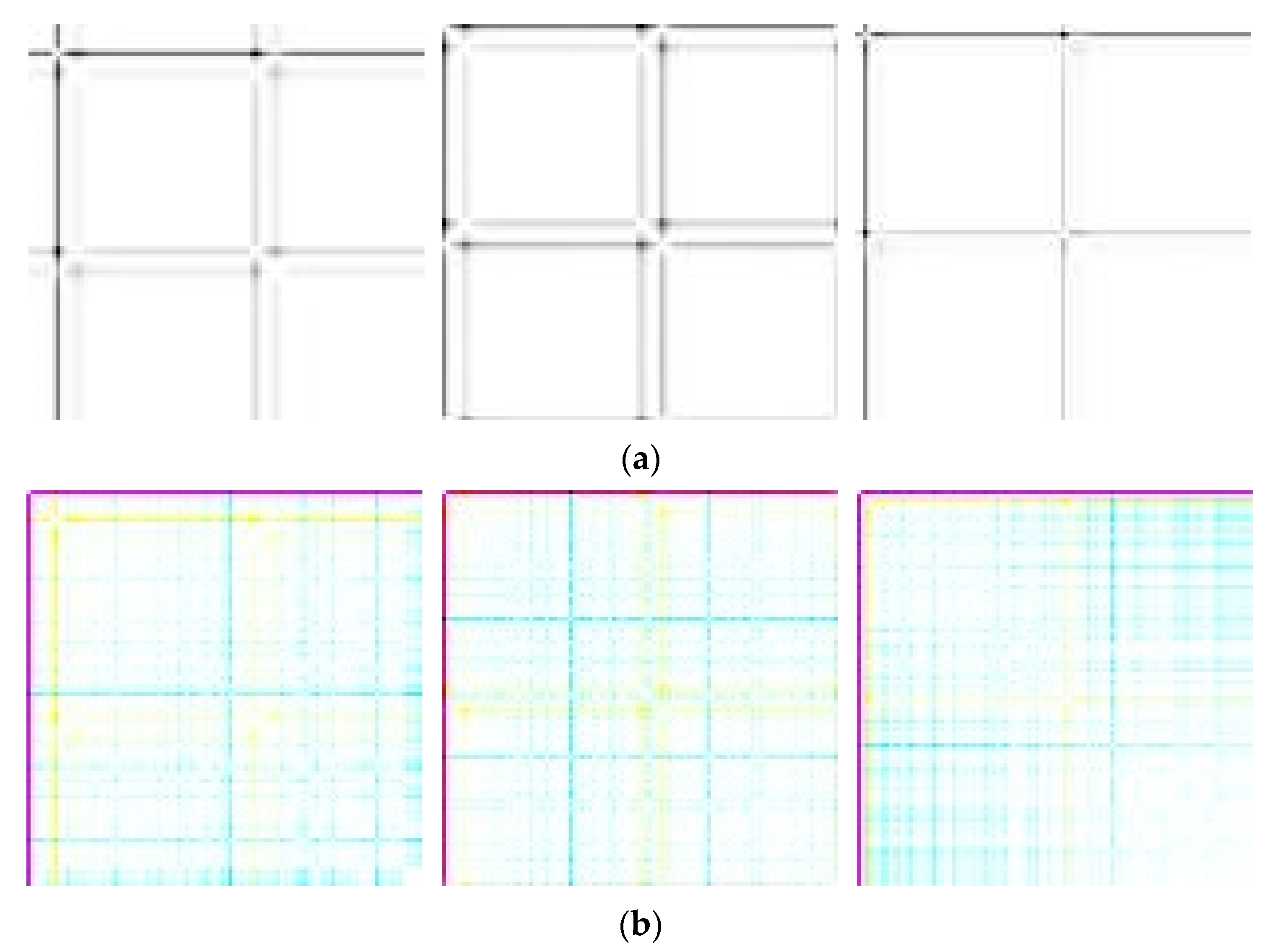
The pixel matrix of the B channel is equivalent to the Gramian matrix in the general GAF, in which the temporal feature of the raw data is contained. The amplitude feature is contained in the pixel matrix of the G channel, and the phase feature is contained in the pixel matrix of the R channel. Finally, by merging the three channels, the iGAF image that combines the temporal feature, the amplitude feature, and the phase feature extracted from the DGM, the AGM, and the PGM, is generated. Here, two sets of images generated by GAF and iGAF are shown in
Figure 2 for comparison. It can be seen that the feature differentiation between iGAF images of the three appliances increases.
It is noted that there are six mapping relationships between the three Gramian matrices and the three channels of the image. We use (10), (11), and (12) to demonstrate one of the six. Changing the mapping relationship does not affect the performance of the iGAF method. The six mapping relationships are equivalent.
2.4. Analysis of Feasibility of the iGAF
In the existing GAF, the differences in amplitude between different loads are prevented from being reflected in the generated image by normalization [
16]. Additionally, the phase features can be lost because the matrix used to generate images can only reflect the temporal correlation of the raw time series. Moreover, in the existing GAF, only the raw data Gramian matrix is calculated and mapped to the B channel, G channel, and R channel at the same time, which results in equal pixel matrices of the three channels so that the final generated image is grayscale. Color GAF images can be generated by pseudocolor image processing, but the feature information of the load electrical signal contained in it is still only from the raw data Gramian matrix. The features that are lost during the coding will not be offset because of pseudocolor image processing. The absence of the amplitude feature and phase feature is the key reason that the loads that carry similar current signals cannot be accurately identified. It needs to be improved. Combined with the principle of the convolutional layer of CNN, the following analysis is performed.
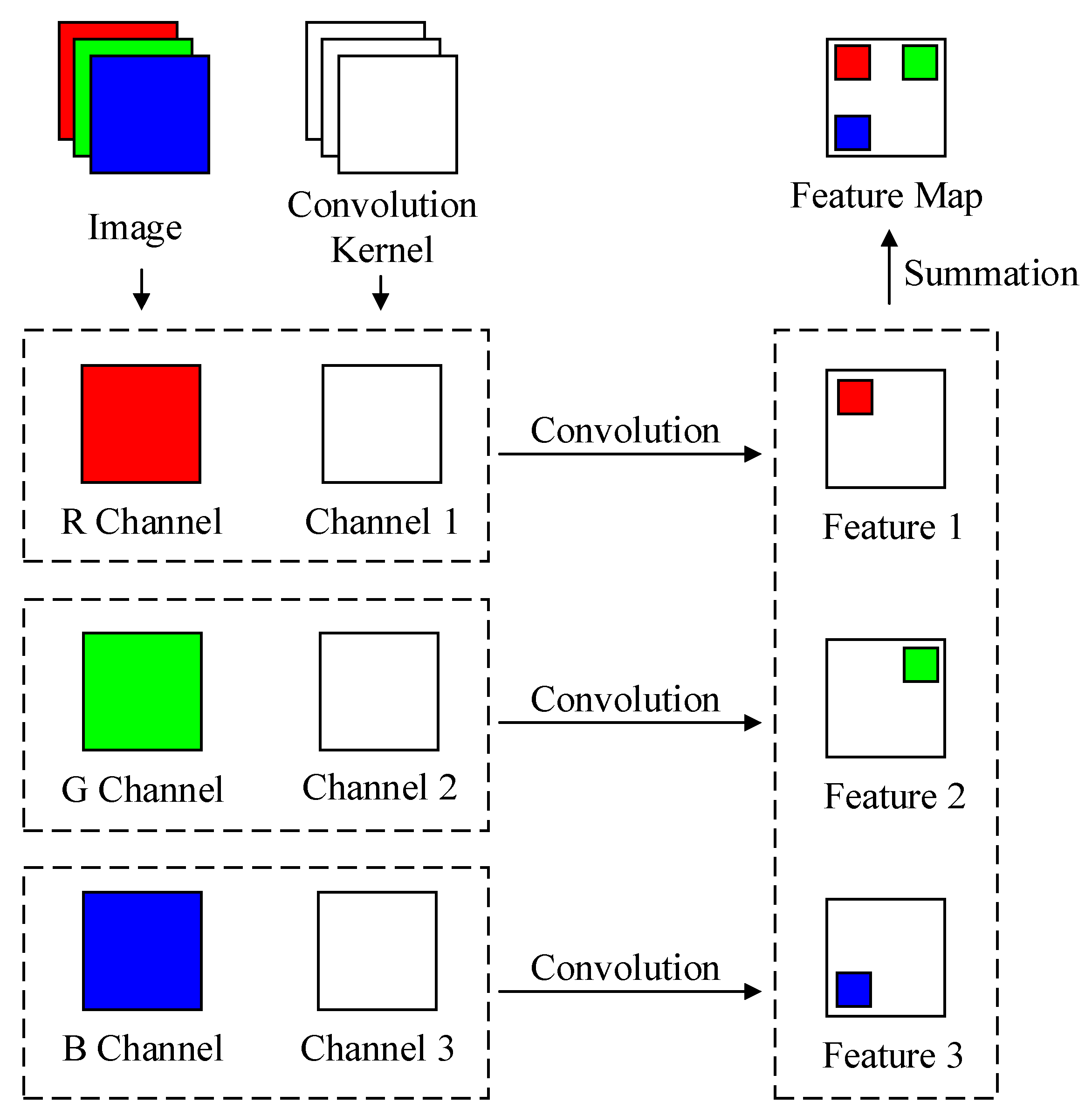
The convolution layer is the core block of a CNN, which consists of a learnable convolution kernel. When the input is a three-channel image, the number of channels of the convolution kernel equals the number of channels of the input image, as shown in
Figure 3.
In the feature extraction process, the convolution kernel is divided into three channels to scan the three channels of the image, and the features of each channel are extracted and summarized into one feature map at the end.
For the images generated by the existing GAF, there are three channels. However, the pixel matrices of the three channels are equal, which leads to two problems. First, there is no difference in the features of the three channels. Even if pseudocolor image processing is performed later, the missing amplitude feature and phase feature still cannot be offset. Second, since the pixel matrices of the three channels are equal, the update of the convolution kernel based on the data of three channels in the iterative process is equivalent to the update based on the data of only one channel. In this case, the convolution of a three-channel image using a three-channel convolution kernel is equivalent to the convolution of a single-channel image using a single-channel convolution kernel. The feature extraction capability of the three-channel convolution kernel is not fully utilized, and thus the final performance of identification could be degraded.
However, for the three-channel image generated by the iGAF, the pixel matrices of the three channels are not equal, so the feature information of the three channels is not the same, which greatly increases the recognizability of the generated image. Meanwhile, the feature extraction ability of the three-channel convolutional kernel is fully utilized so that the originally confusing images can be more accurately identified when using the same image classification model.
4. Experiments
4.1. Private Datasets
4.1.1. Data Collection
To conduct experimental verifications, the raw electric current signals of eleven different electric appliances and eight different appliance combinations are collected. The categories of loads are shown in
Table 2.
It is seen in
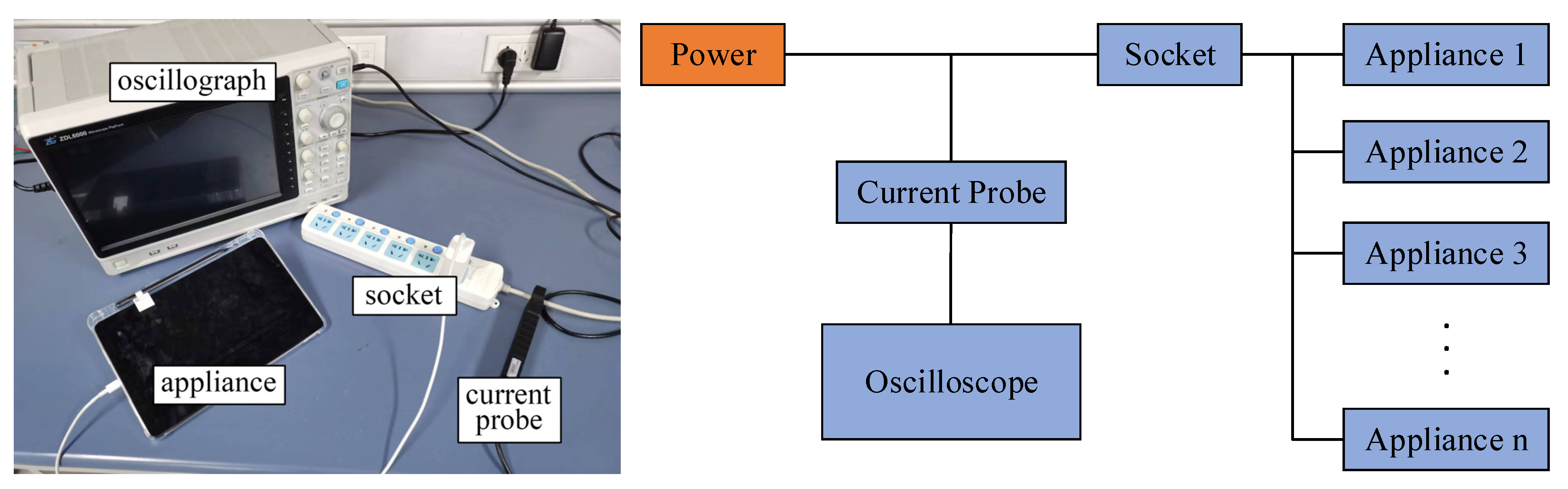
Table 2 that the standby and running states of the same appliance are recorded as two categories due to the large difference in currents between the two states. The equipment for data collection and the diagram of the connection are shown in
Figure 6. A ZDL6000 oscillograph and a ZCP30 current probe are used for data collection. A 220 V 50 Hz AC power is used for the power supply. The range of the current probe is 30 A. It is noted that the sampling frequency should be high enough to avoid aliasing [
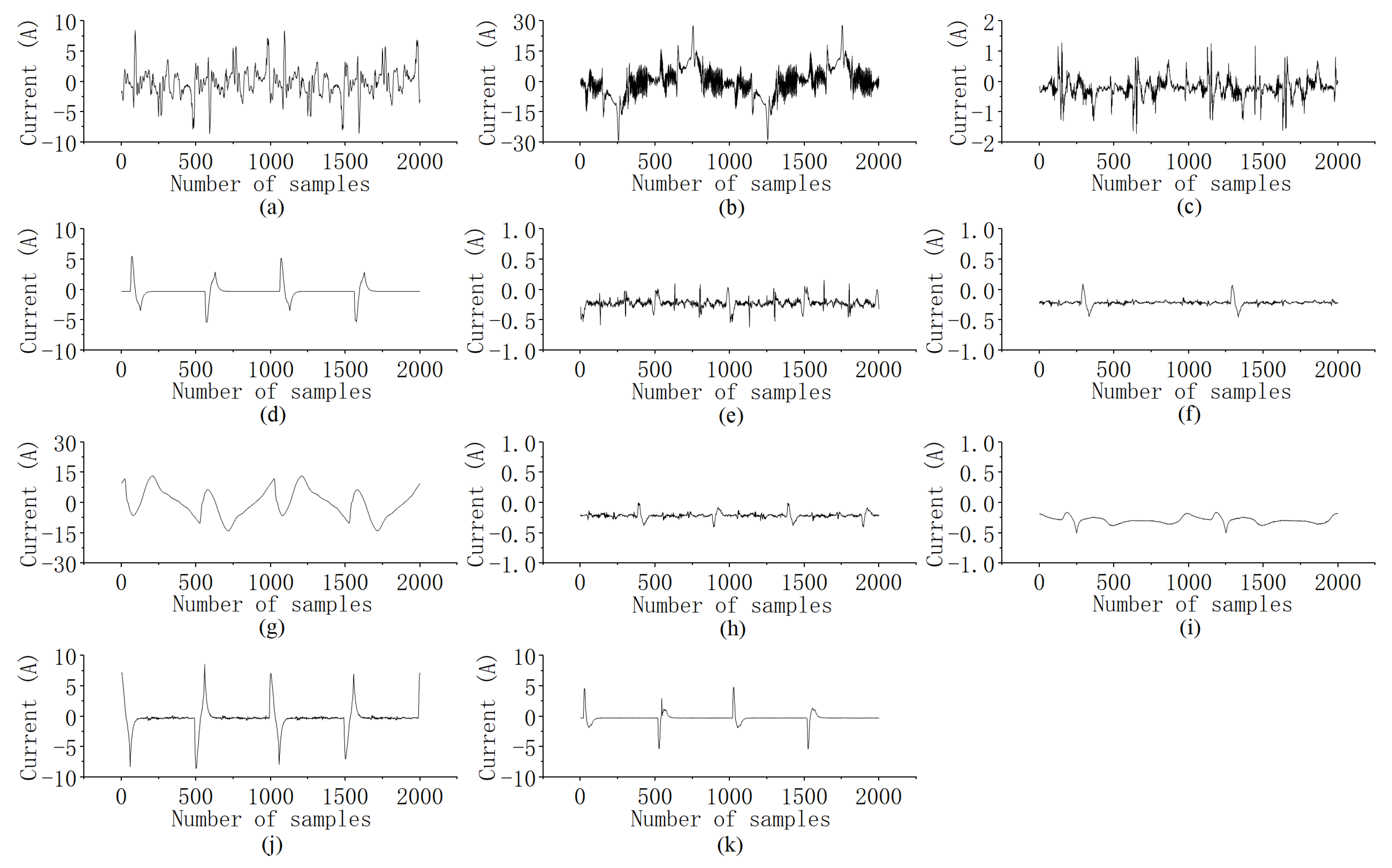
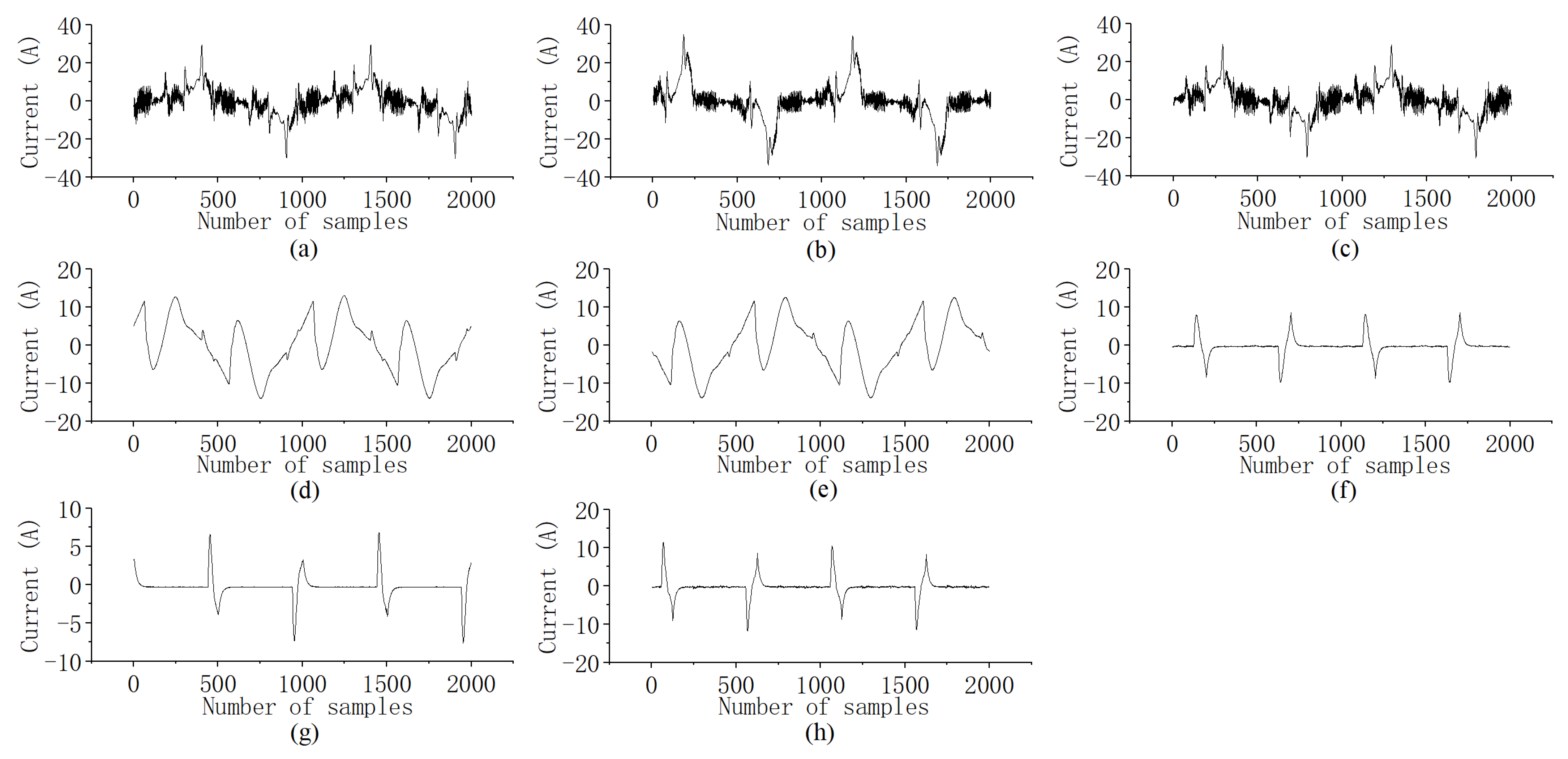
29] and information loss. Here, the sampling frequency is set as 50 kHz, and the sampling time is 20 s. Collected current waveforms are shown in
Figure 7 and
Figure 8. Due to the large amount of data, only the first two cycles of each category are shown.
4.1.2. Production of Datasets
Based on the collected current signals in
Table 2, two datasets marked as the eleven single electric appliances dataset (ESEAD) and eight mixed-category appliance dataset (EMCAD) are constructed. The ESEAD dataset contains eleven categories of a single appliance. The EMCAD dataset contains four categories of single appliances and four categories of appliance combinations. Furthermore, as shown in
Table 3, each category in each dataset is assigned a label.
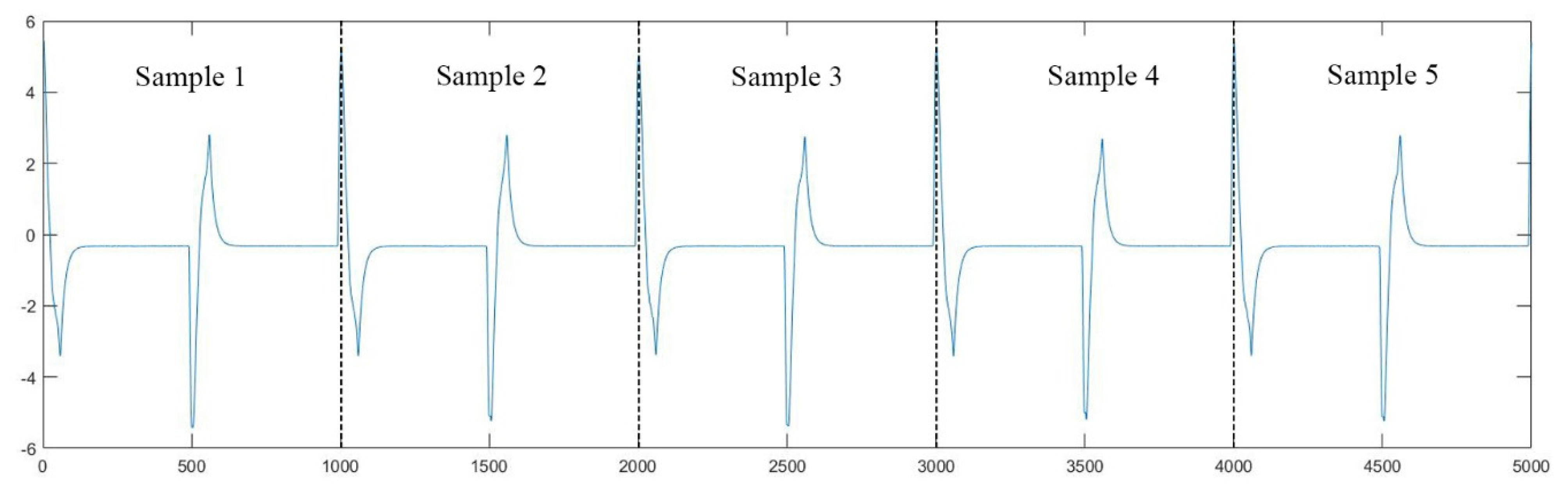
The method for splitting the collected current data to generate samples is as follows. As shown in
Figure 9, taking the first five cycles of the waveform of tablet + smartphone, for example, each cycle of the waveform is taken as a sample. For each category, with a sampling frequency of 50 kHz for 20 s, 1 million data points are finally collected, and there are 1000 data points in each cycle of the waveform. Thus, the raw data of each category can be divided into 1000 samples. The total number of samples for ESEAD is 11,000, and the number of samples for EMCAD is 8000. For the training model, each dataset is further divided into the training set, the validation set, and the test set with a ratio of 7:2:1. Each sample in the dataset will be encoded as an image, which is used for training or testing for the model.
4.2. Public Datasets
In addition to the datasets measured and produced by ourselves, two public datasets, namely PLAID [
30] and WHITED [
31], are used to validate the proposed method. The PLAID dataset includes current and voltage measurements sampled at 30 kHz from 11 different appliance types present in more than 60 households in Pittsburgh, Pennsylvania, USA. The WHITED dataset is derived from 54 types of electrical appliances in 9 regions of the world, including 1339 instances, and the sampling frequency is 44.1 kHz. Notably, the PLAID and WHITED datasets contain some appliances of the same category but varying brands, rendering them highly suitable for validating our proposed approach. We selected 9 types of appliances from the PLAID dataset to compose the experimental PLAID dataset. Additionally, we selected 9 types of appliances from the WHITED dataset to compose the experimental WHITED dataset. Following a similar sample splitting method as that of the ESEAD and EMCAD datasets, a complete cycle of waveform data during the stable operation of each electrical appliance is taken as a sample. The labels for each category in both datasets are shown in
Table 4 and
Table 5.
4.3. Experimental Arrangement
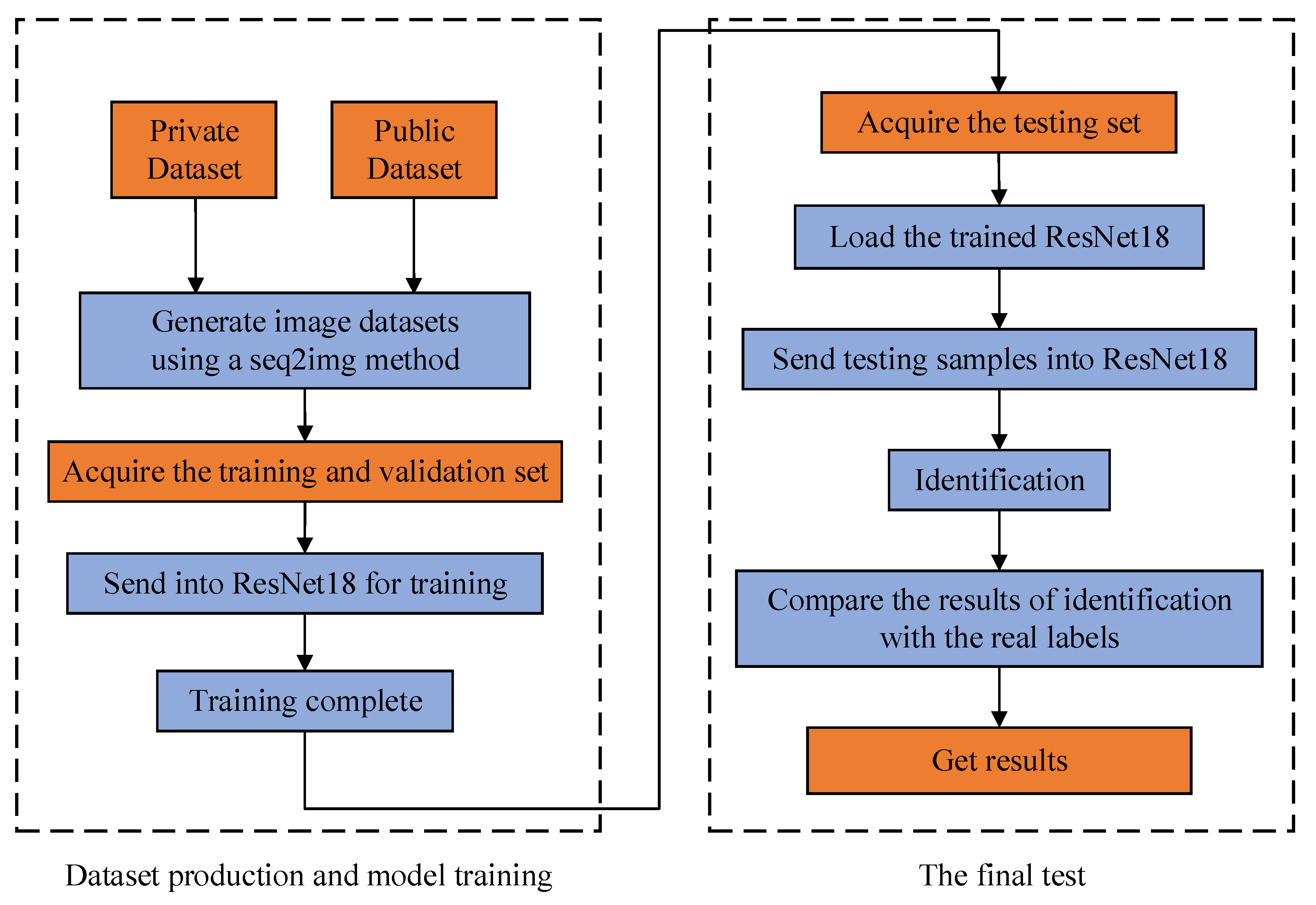
In this paper, several experiments are constructed based on the selection of datasets and seq2img methods. The overall process of the experiment is shown in
Figure 10, and the arrangement of the experiment is as follows.
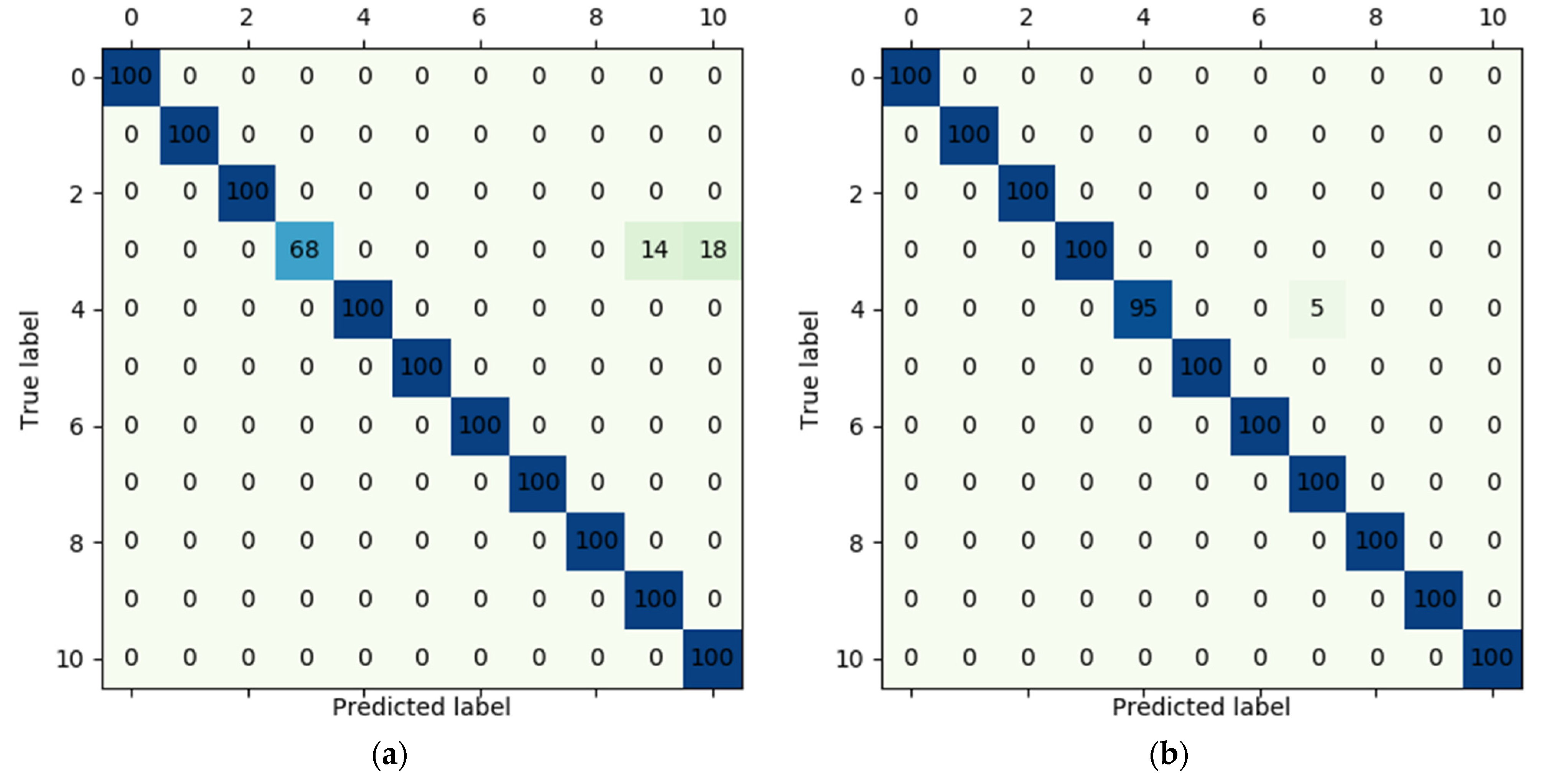
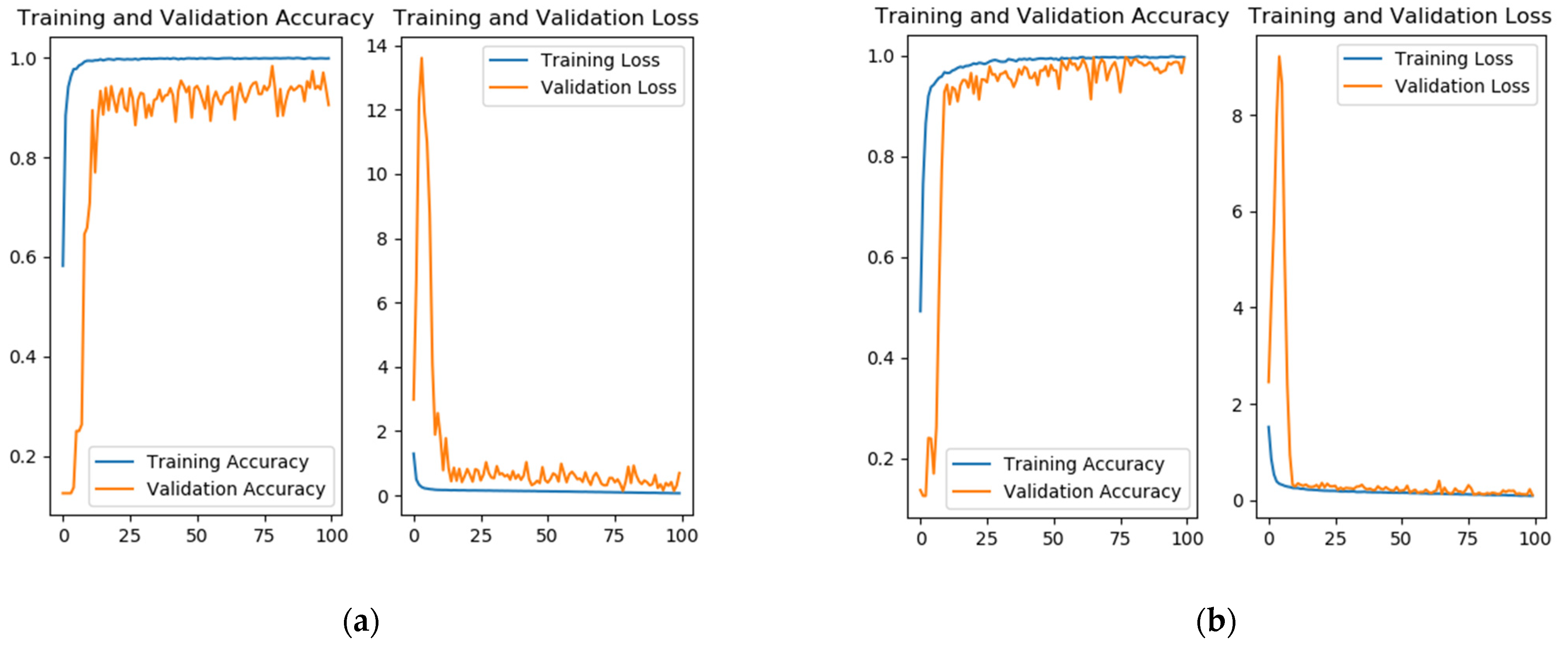
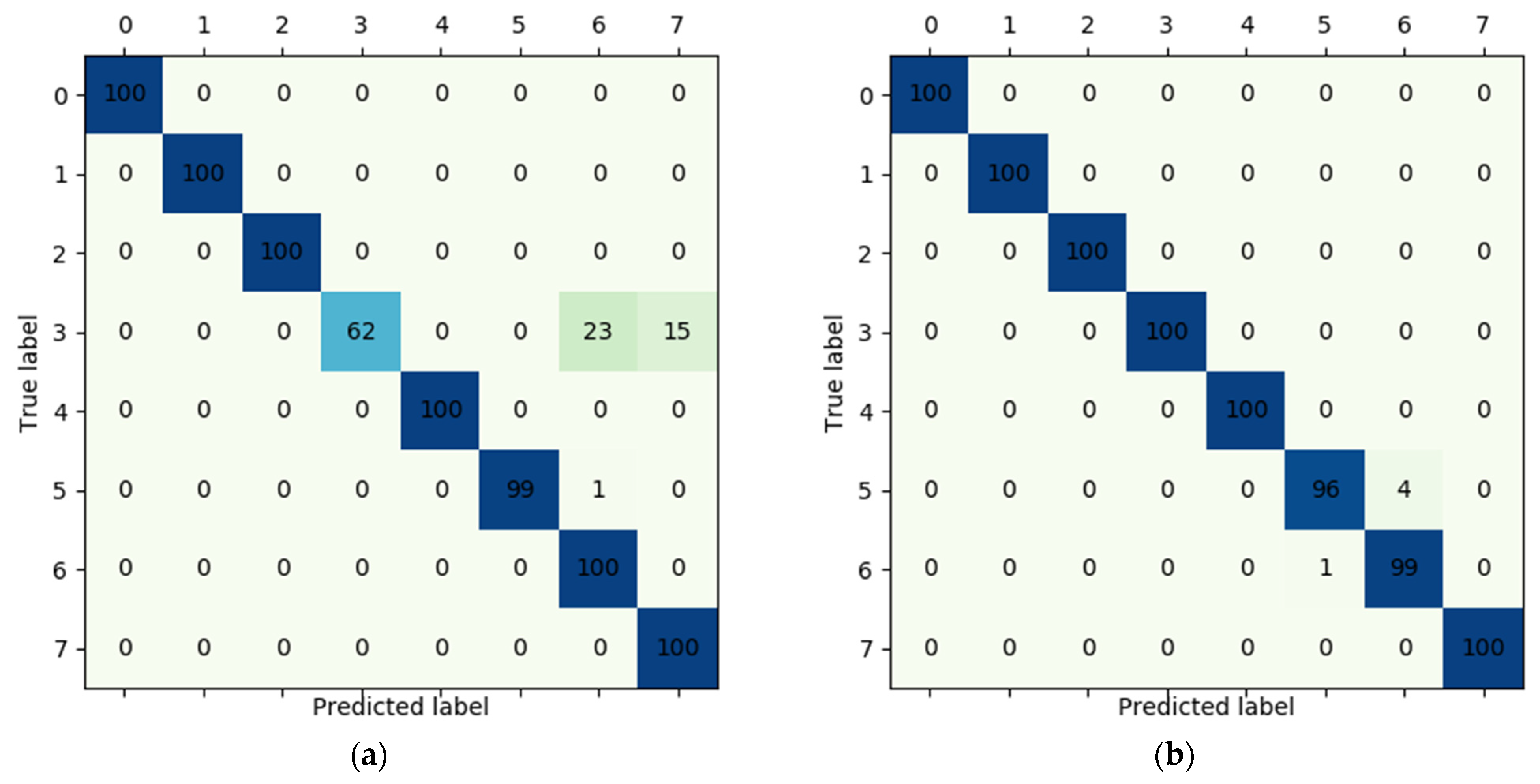
In the first experiment, the ESEAD dataset is coded using the general GAF and iGAF to generate the GAF-ESEAD image dataset and iGAF-ESEAD image dataset, which are then used for the ResNet18 training to obtain the GAF-ResNet-S model and the iGAF-ResNet-S model. Finally, the test set in the ESEAD dataset is applied to the GAF-ResNet-S model and iGAF-ResNet-S model for performance comparisons. Here, various evaluation metrics are used, including precision, recall, and F1 score.
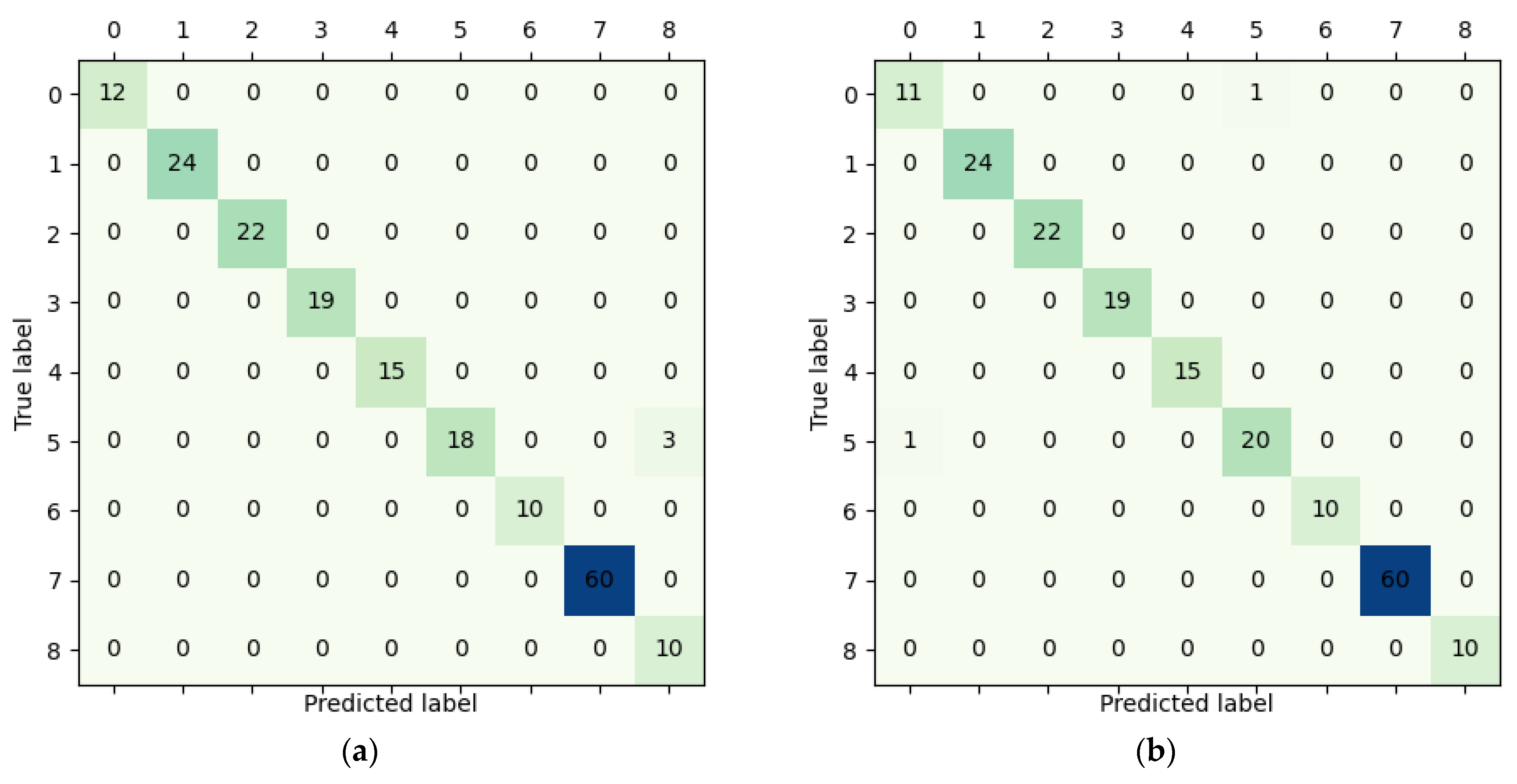
In the second experiment, the same experimental procedure is performed on the EMCAD dataset. Precision, recall, and F1 score are used to evaluate the experimental results.
In the third experiment, the experimental PLAID and experimental WHITED datasets are used to validate the proposed method. GAF images and iGAF images are generated based on these two public datasets to train the ResNet18. The overall identification accuracy (OIA) is the evaluation metric for evaluating the performance of the model.
Furthermore, in the fourth experiment, for comparing the proposed method with other NILM methods based on seq2img, another four seq2img methods, V-I trajectory, color V-I trajectory, MTF, and RG, are used to code the ESEAD, EMCAD, PLAID, and WHITED dataset. The overall identification accuracy is adopted to evaluate the identification performance.
The hyperparameters of the models are constant. Each generated image has a resolution of 100 by 100 pixels and contains a total of 10,000 pixels. It should be noted that the fact that each image contains 10,000 pixels does not mean that the image contains data of 10,000 sampling points. Each image is converted from its corresponding sample through a seq2img method, so the information contained in each image is the information of a sample containing 1000 sampling points. The adaptive moment estimation (Adam) is used as the parameter optimizer with a learning rate of 0.00001, a first-order decay rate of 0.9, and a second-order decay rate of 0.999. Adam is straightforward to implement and computationally efficient [
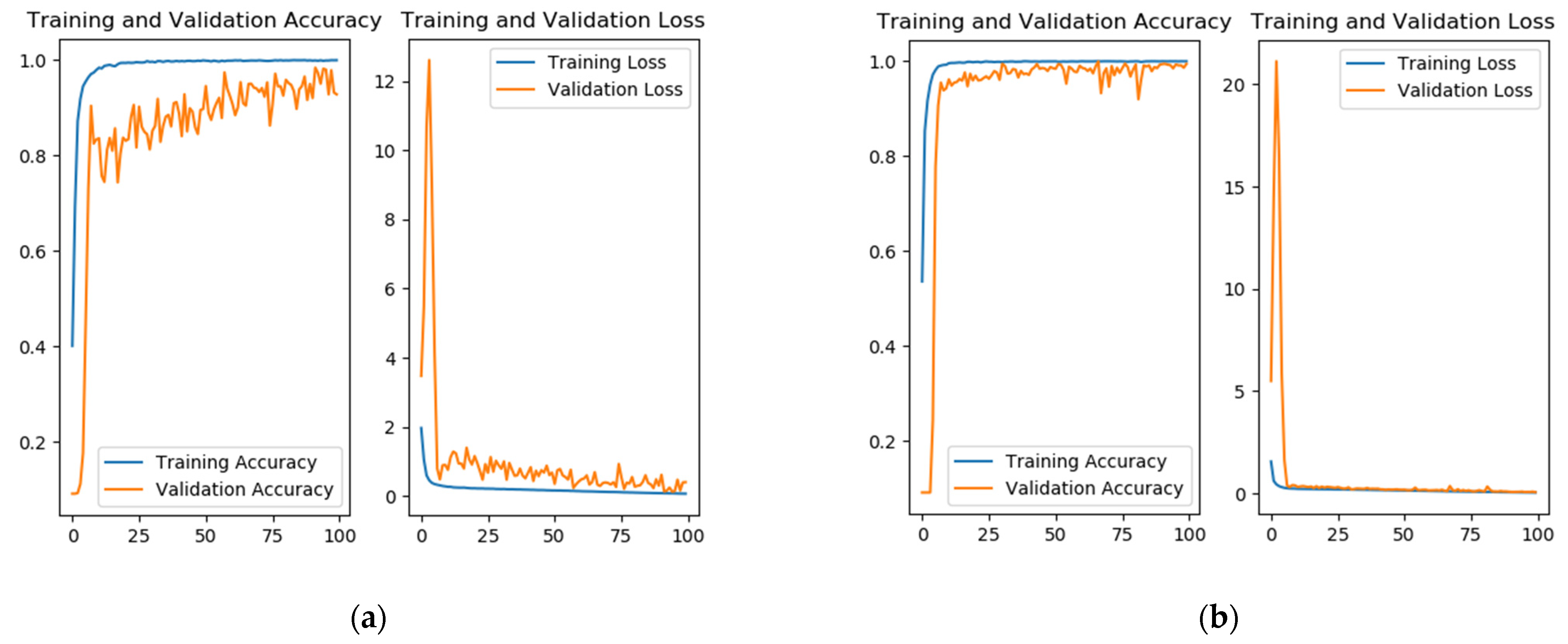
32]. The batch size is set at 80 to balance the data operation of the model with fast convergence without exceeding the GPU memory. To prevent underfitting and overfitting, the training process will run 100 epochs. The loss function is sparse categorical cross-entropy.
All models are deployed on a computer with an Intel Core i7-8750H hexacore CPU and NVIDIA GeForce GTX 1060 GPU. An open-source framework TensorFlow 2.1.0, the deep learning platform based on Python 3.7, is used for program implementation.
4.4. Evaluation Metrics
Here, three parameters, precision (PR), recall (RCL), and
score (FS) are defined to evaluate the load identification performance [
33]. The calculations are as follows:
where
is the true positive, i.e., the number of samples when the predicted category is
j, and the actual category is
j;
is the false positive, i.e., the number of samples when the predicted category is
j, and the actual category is not
;
is the false negative, i.e., the number of samples when the predicted category is not
, and the actual category is
.
is the weighting ratio of RCL to PR. Since RC and PR are both important indicators,
is used.
Moreover, the overall identification accuracy (
), which is defined in (17), will be used to evaluate the overall performance of the model.
where
is the number of correct identifications;
is the total number of identifications.
6. Conclusions
In this article, an improved method of GAF is studied, and a nonintrusive load identification method based on the improved GAF and ResNet18 is proposed. The amplitude Gramian matrix and phase Gramian matrix are calculated based on the fast Fourier transform and the calculation of the Gramian matrix. It is found that by assigning the values of the raw data Gramian matrix, the amplitude Gramian matrix, and the phase Gramian matrix to the pixel matrices of the B channel, G channel, and R channel, the amplitude and phase features of the raw data can be added to the generated images. Hence, the recognizability loads with similar current signals are improved. Experiments are performed based on two private datasets and two public datasets. Results show that, with the improved load identification method, the overall identification accuracies on four datasets are improved, and the identification accuracies of easily confused loads in the two private datasets are significantly increased.
In future research, the lightweight and deployment of the algorithm should be considered. The number of parameters to be trained in the algorithm should be further reduced, and the computing efficiency on edge computing devices with low computing power should be further improved.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}