
A Novel Unmanned Aerial Vehicle Charging Scheme for Wireless Rechargeable Sensor Networks in an Urban Bus System


Abstract
:1. Introduction
- We proposed a UAV-based charging scheme in an urban bus system, involving the coordination between UAVs and bus schedules;
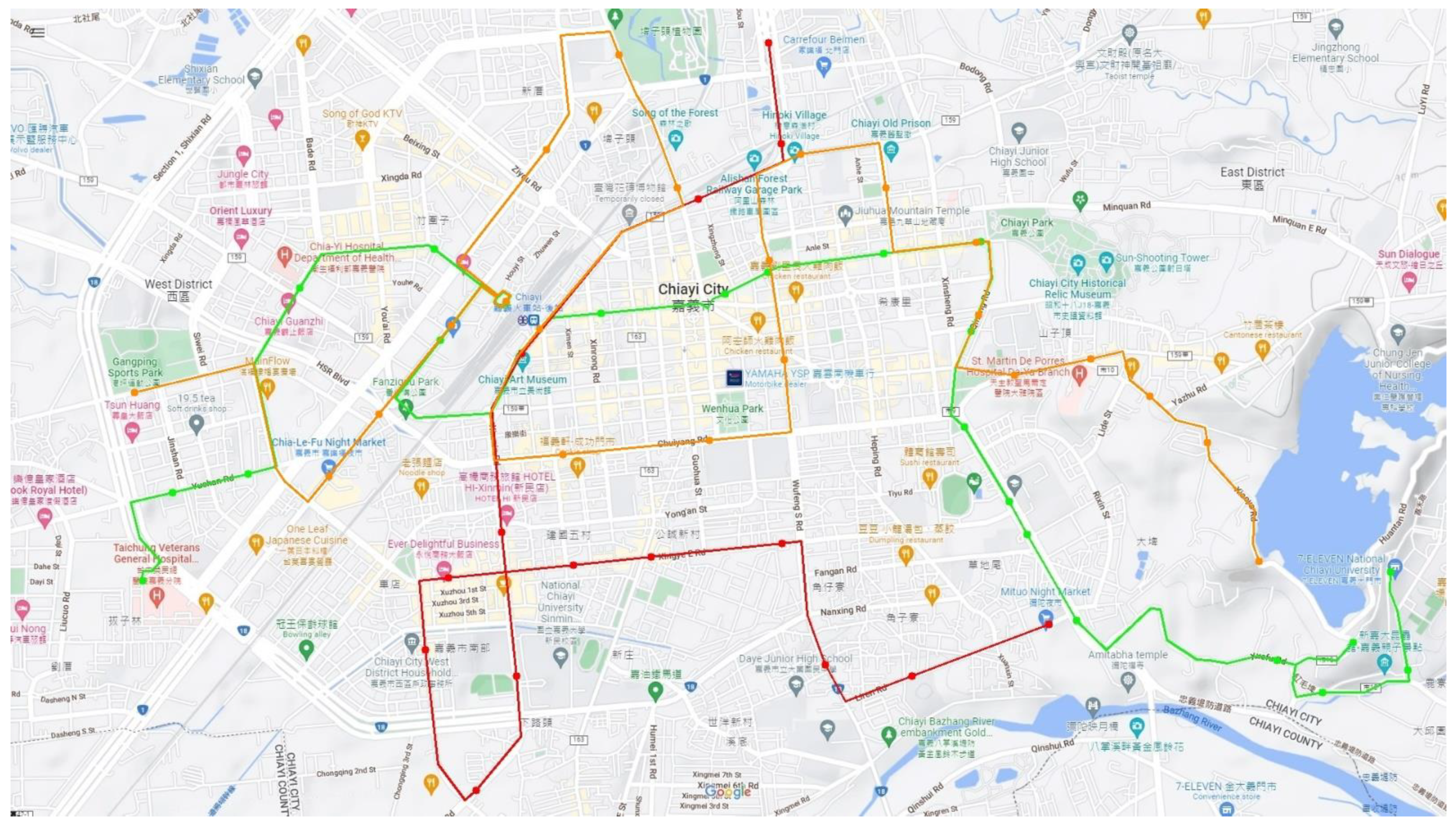
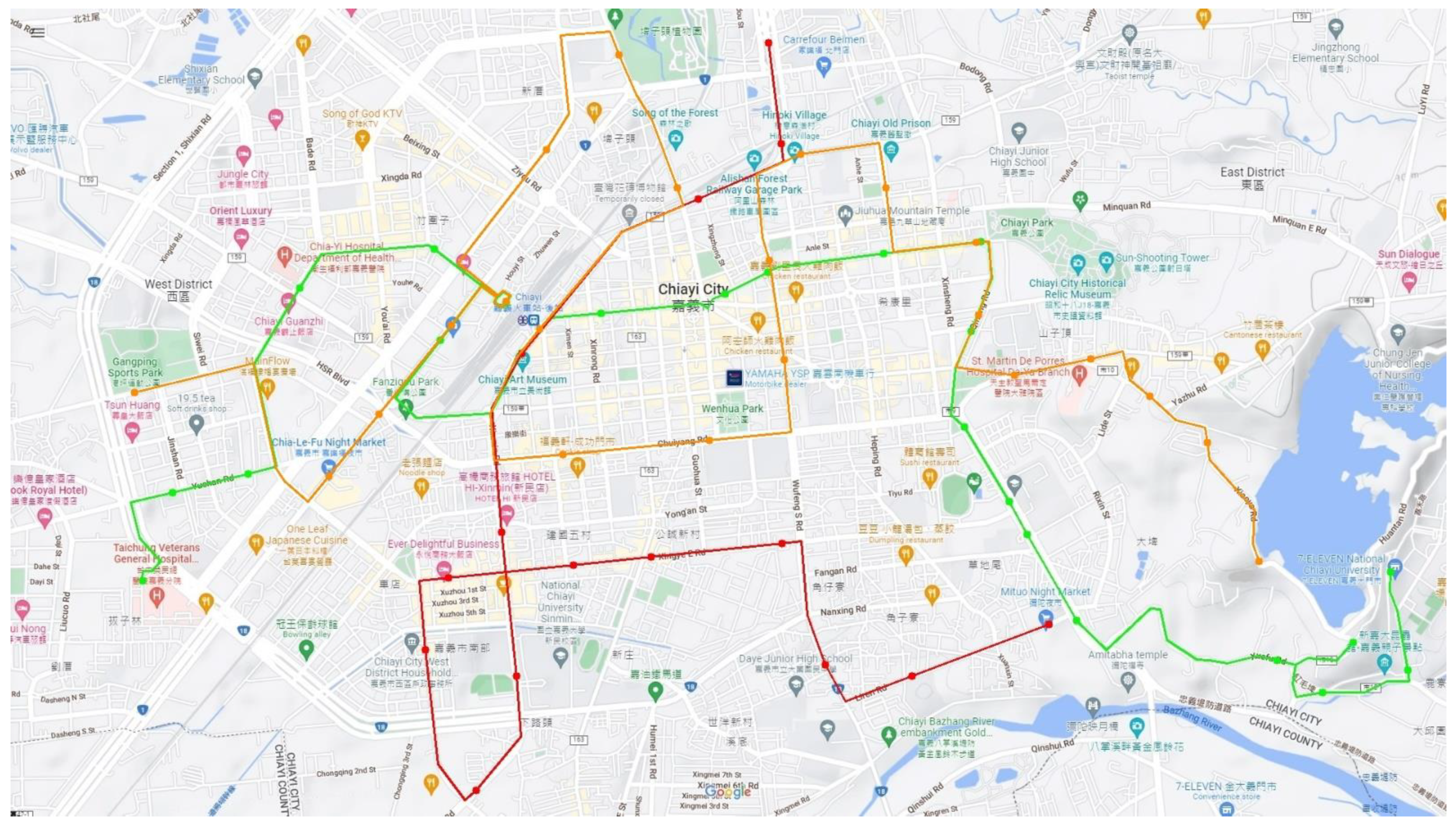
- We use real maps and bus information to design charging algorithms. The UAVs can be recharged by urban buses and then supply the power to sensor nodes;
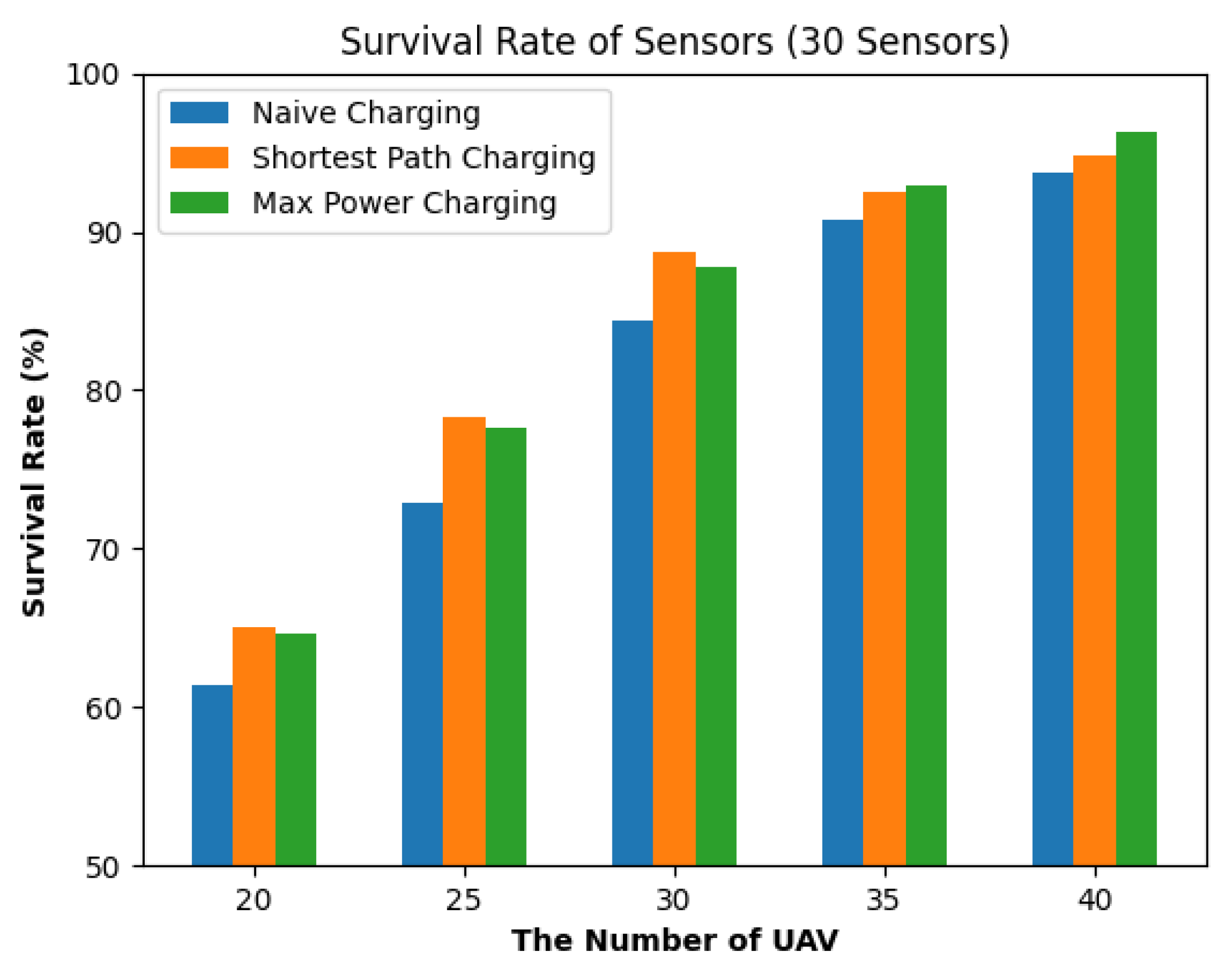
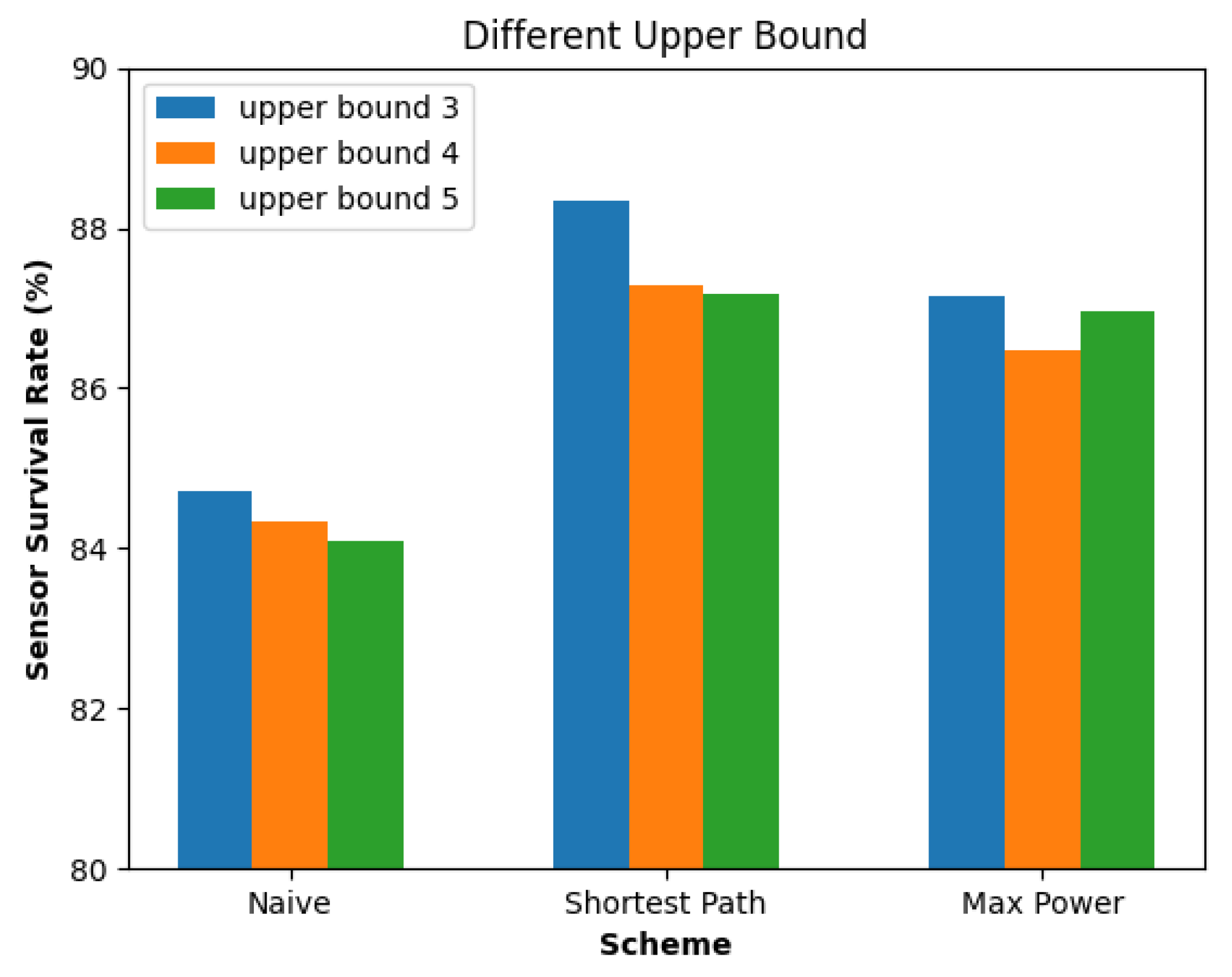
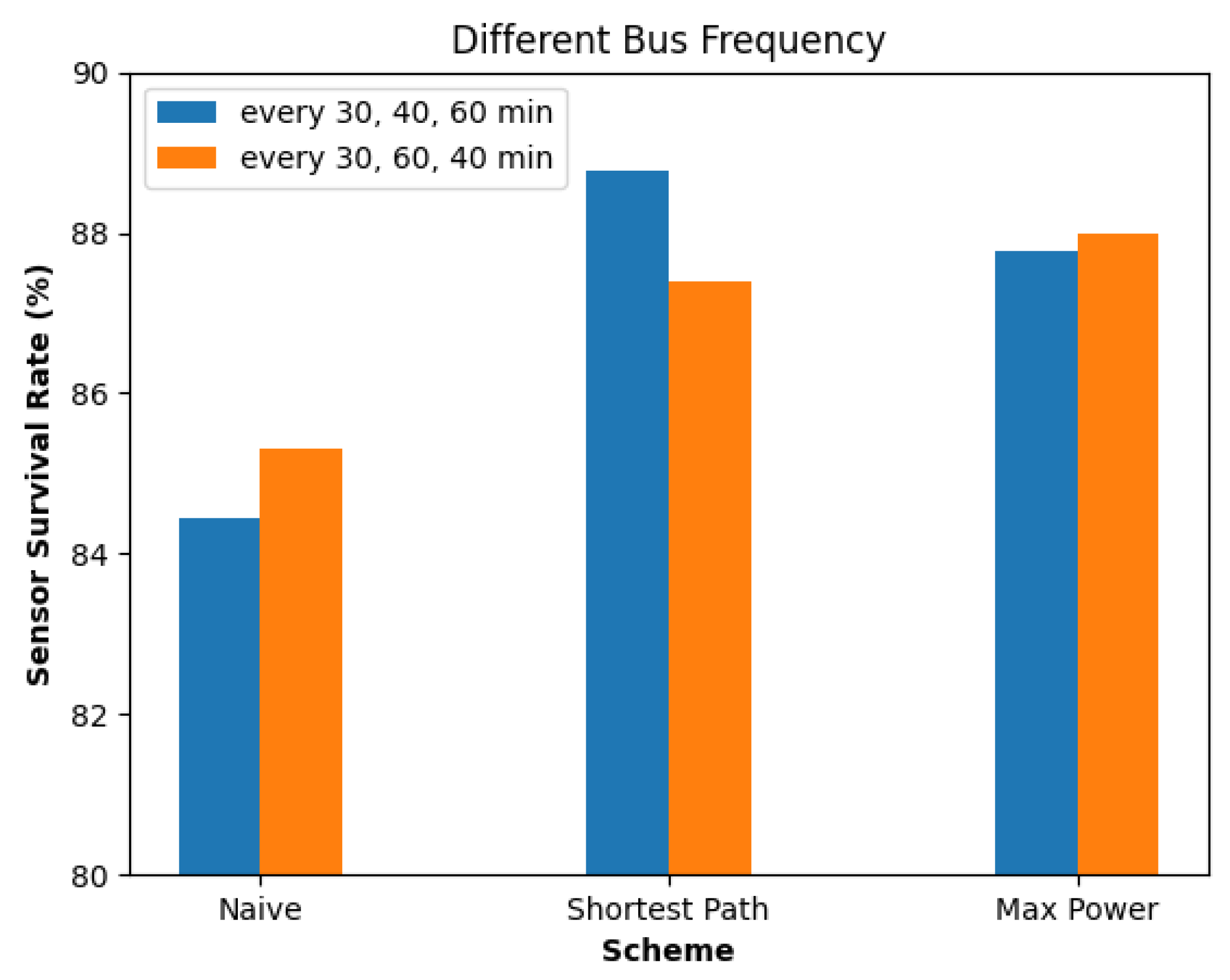
- We implemented three charging strategies: naïve, shortest path, and max power. The proposed charging strategy can be easily applied to practical fields.
2. Related Works
3. Method
3.1. Problem Definition
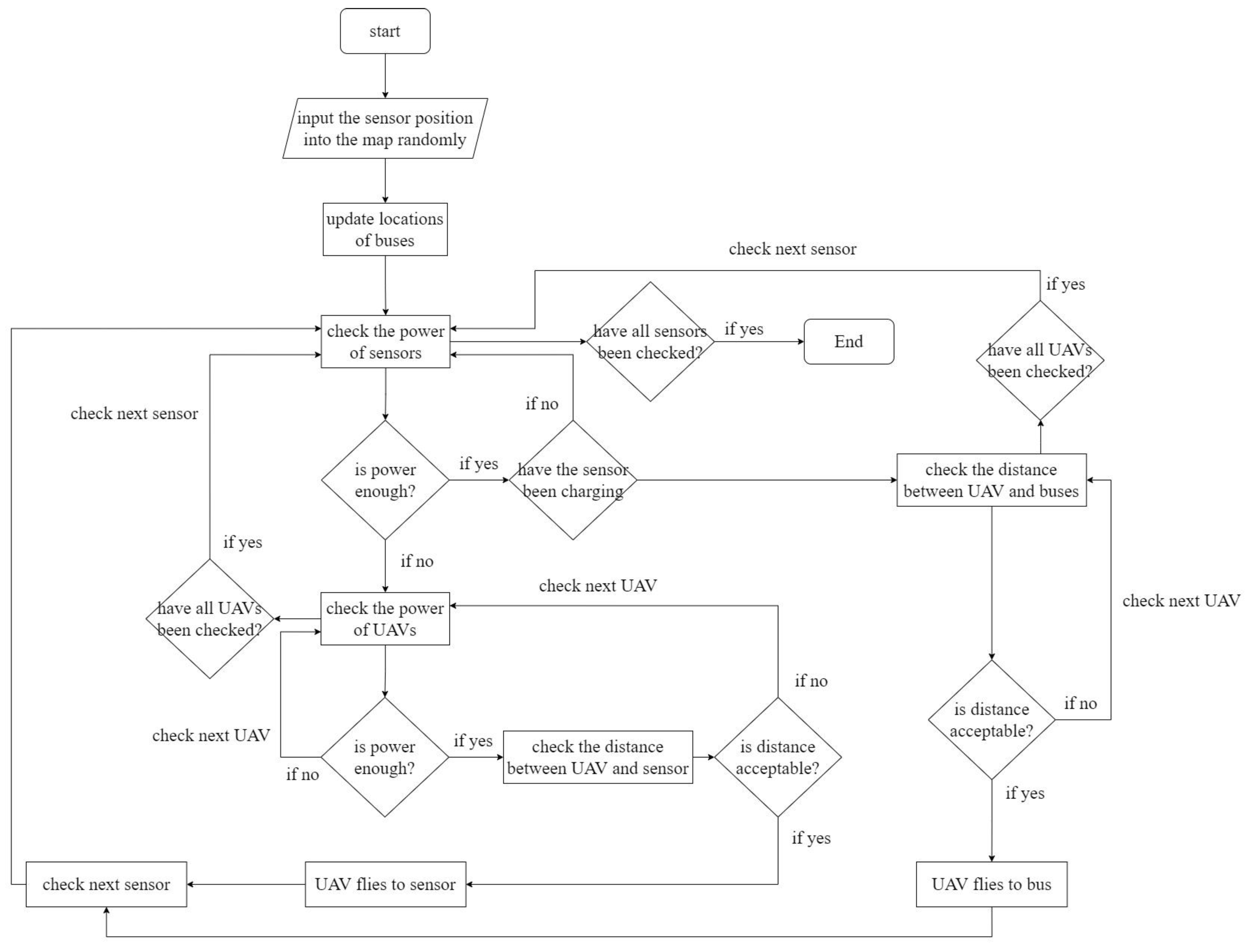
3.2. Algorithms
| Algorithm 1: Charging Strategy with Naïve Charging |
| Input: Output: Step 1. Randomly select the sensor position around bus route within flight distance limit of UAV Step 2. Initialize the locations of UAV to each bus Step 3. every 30 seconds foreach do End foreach Step 4. Check the power of all sensors spi, if the power of sensor spi is not enough, search the location of UAVs uli, and check the UAV supplementary battery upi, if upi, is enough, ui flies to sli foreach do ) then do ) then End if End foreach End if End foreach Step 5. If the power of sensors is enough, UAV flies to bus from the sensor foreach do ) then do ) then End if End foreach End if End foreach Step 6. foreach do ) then End if End foreach foreach do ) then End if End foreach |
| Algorithm 2: Shortest Path Charging |
| Input: Output: From the step 4 in Algorithm 1: find the shortest path between bus route and location of sensor foreach do ) then do if then ; End if End foreach if then ; End if End if End foreach |
| Algorithm 3: Max Power Charging (with Shortest Path Charging) |
| Input: Output: After finding the shortest path between bus and sensor : foreach do ; End foreach ; |
4. Experimental Results
4.1. Experimental Environment and Parameters
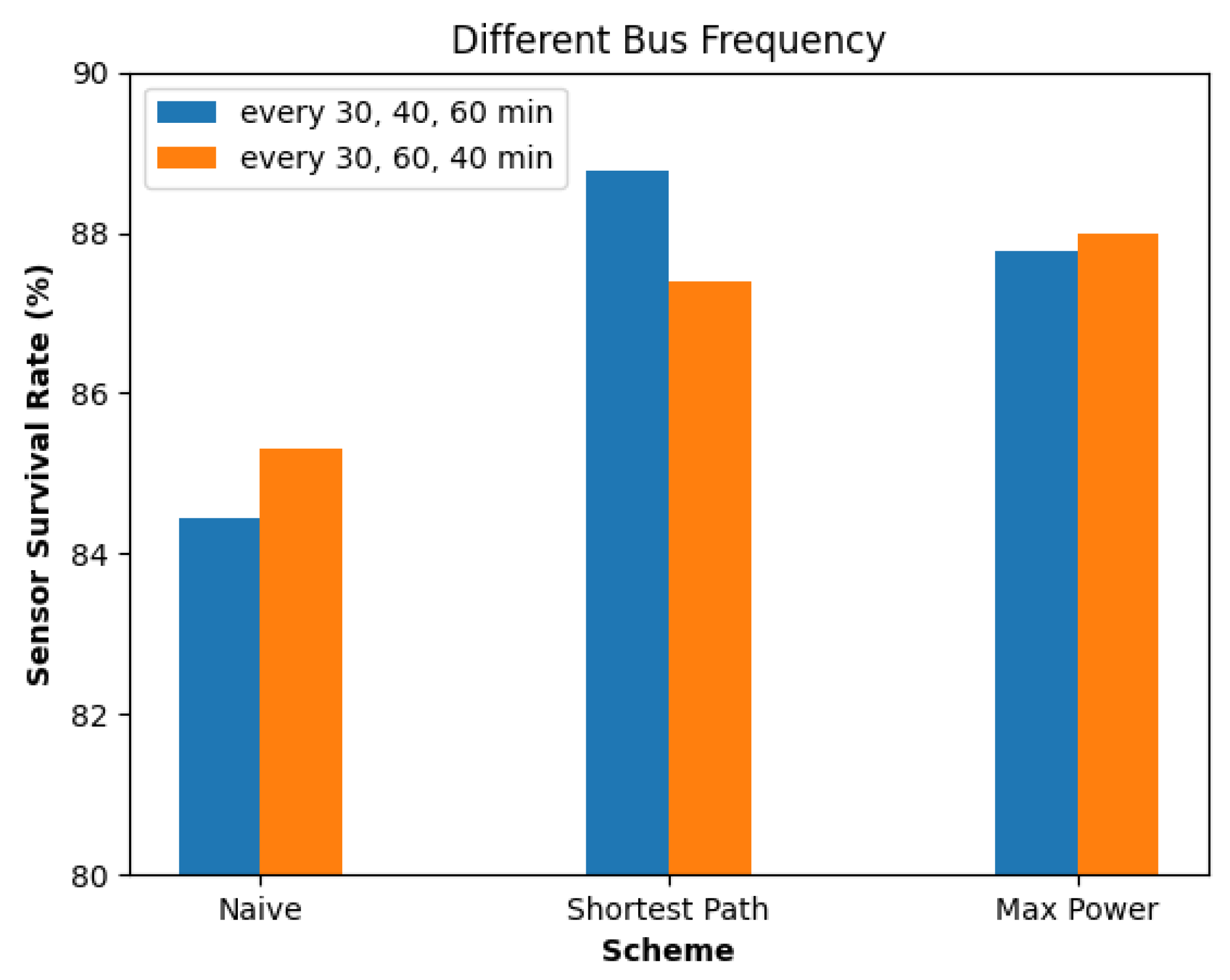
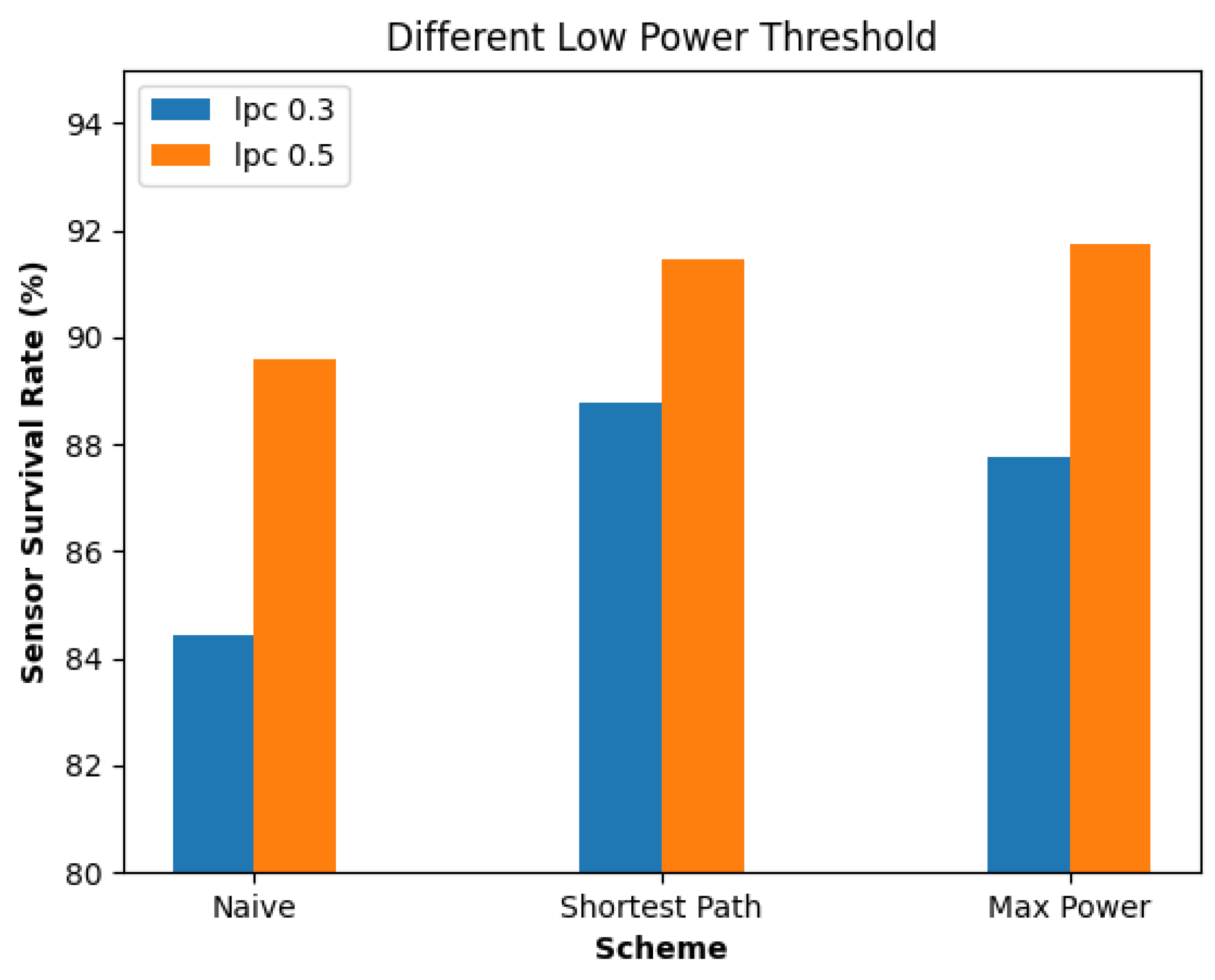
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855. [Google Scholar] [CrossRef] [Green Version]
- Griffin, B.; Detweiler, C. Resonant wireless power transfer to ground sensors from a UAV. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; IEEE: New York, NY, USA, 2012; pp. 2660–2665. [Google Scholar]
- Jin, Y.; Xu, J.; Wu, S.; Xu, L.; Yang, D.; Xia, K. Bus network assisted drone scheduling for sustainable charging of wireless rechargeable sensor network. J. Syst. Archit. 2021, 116, 102059. [Google Scholar] [CrossRef]
- Trotta, A.; Di Felice, M.; Montori, F.; Chowdhury, K.R.; Bononi, L. Joint coverage, connectivity, and charging strategies for distributed UAV networks. IEEE Trans. Robot. 2018, 34, 883–900. [Google Scholar] [CrossRef]
- Chen, J.; Yu, C.W.; Ouyang, W. Efficient Wireless Charging Pad Deployment in Wireless Rechargeable Sensor Networks. IEEE Access 2020, 8, 39056–39077. [Google Scholar] [CrossRef]
- Lin, T.-L.; Li, S.-L.; Chang, H.-Y.J.E. A power balance aware wireless charger deployment method for complete coverage in wireless rechargeable sensor networks. Energies 2016, 9, 695. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.-L.; Chang, H.-Y.; Wang, Y.-H. A Novel Hybrid Search and Remove Strategy for Power Balance Wireless Charger Deployment in Wireless Rechargeable Sensor Networks. Energies 2020, 13, 2661. [Google Scholar] [CrossRef]
- Wang, X.; Dai, H.; Huang, H.; Liu, Y.; Chen, G.; Dou, W. Robust scheduling for wireless charger networks. In Proceedings of the IEEE INFOCOM 2019-IEEE Conference on Computer Communications, Paris, France, 29 April–2 May 2019; IEEE: New York, NY, USA, 2019; pp. 2323–2331. [Google Scholar]
- Wu, T.; Yang, P.; Dai, H.; Xu, W.; Xu, M. Charging oriented sensor placement and flexible scheduling in rechargeable WSNs. In Proceedings of the IEEE INFOCOM 2019-IEEE Conference on Computer Communications, Paris, France, 29 April–2 May 2019; IEEE: New York, NY, USA, 2019; pp. 73–81. [Google Scholar]
- Chen, T.-Y.; Wei, H.-W.; Cheng, Y.-C.; Shih, W.-K.; Chen, H.-Y. An efficient routing algorithm to optimize the lifetime of sensor network using wireless charging vehicle. In Proceedings of the 2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems, Philadelphia, PA, USA, 28–30 October 2014; IEEE: New York, NY, USA, 2014; pp. 501–502. [Google Scholar]
- Chiu, T.C.; Shih, Y.Y.; Pang, A.C.; Jeng, J.Y.; Hsiu, P.C. Mobility-Aware charger deployment for wireless rechargeable sensor networks. In Proceedings of the 2012 14th Asia-Pacific, Network Operations and Management Symposium (APNOMS), Seoul, Korea, 25–27 September 2012; IEEE: New York, NY, USA, 2012; pp. 1–7. [Google Scholar]
- Liao, J.-H. Wireless Charger Deployment Optimization for Wireless Rechargeable Sensor Networks. In Proceedings of the 2014 7th International Conference on Ubi-Media Computing and Workshops, Ulaanbaatar, Mongolia, 12–14 July 2014; IEEE: New York, NY, USA, 2014. [Google Scholar]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.Y.; Xing, G.; Sun, Y. Energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2013, 2, 1931–1942. [Google Scholar] [CrossRef]
- Horster, E.; Lienhart, R. Approximating optimal visual sensor placement. In Proceedings of the 2006 IEEE International Conference on Multimedia and Expo, Toronto, ON, Canada, 9–12 July 2006; IEEE: New York, NY, USA, 2006; pp. 1257–1260. [Google Scholar]
- Mo, L.; Kritikakou, A.; He, S. Energy-Aware Multiple Mobile Chargers Coordination for Wireless Rechargeable Sensor Networks. IEEE Internet Things J. 2019, 6, 8202–8214. [Google Scholar] [CrossRef] [Green Version]
- Tang, L.; Guo, H.; Wu, R.; Fan, B. Adaptive Dual-Mode Routing-Based Mobile Data Gathering Algorithm in Rechargeable Wireless Sensor Networks for Internet of Things. Appl. Sci. 2020, 10, 1821. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Charger Mobility | Bus Route and Schedule | Awareness | UAV Based | Simulation Environment | Hardware Experiment |
|---|---|---|---|---|---|---|
| He et al. (2012) [13] | Fixed | No | Energy Provision | No | WISP platform | Yes |
| Chiu et al. (2012) [11] | Fixed | No | Mobility Aware | No | Manhattan grid-based map and Random Walk Mobility Model | No |
| Liao et al. (2013) [12] | Fixed | No | 3D beamforming | No | C++ | No |
| Lin et al. (2016) [6] | Fixed | No | Power Balance Aware | No | C++ | No |
| Mo et al. (2019) [15] | Mobile | No | Energy Aware | No | Matlab | No |
| Tang et al. (2020) [16] | Mobile | No | Routing and Energy Aware | No | Matlab | No |
| Chen et al. (2020) [5] | Mobile | No | Travel Distance Aware | Yes | Visual Studio C# | No |
| Jin et al. (2021) [3] | Mobile | Yes | Energy Aware | Yes | Google Map and Inspire 2 Parameter | Yes |
| Ours | Mobile | Yes | Travel Distance and Energy Bound Aware | Yes | Google Map and Python | No |
| Parameters | The Description of Parameters |
|---|---|
| , , | Sensor, UAV, and Bus |
| The number of sensors and UAVs | |
| , , | The locations of sensors, UAVs, and buses |
| , | The power of sensors and UAVs |
| The lower bound threshold of the power of sensors and UAVs | |
| The upper bound threshold of the power of sensors and UAVs | |
| UAV flight distance range |
| Parameters | The Description of Parameters |
|---|---|
| n | number of 30 |
| d | 100 units |
| Power maximum | 100% |
| lpc | 30% |
| upc | 85% |
| Sensor Consumption | 0.6%/min |
| UAV supplement Sensor | 1%/min |
| Bus supplement UAV | 2%/min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.-L.; Chang, H.-Y.; Wang, Y.-H. A Novel Unmanned Aerial Vehicle Charging Scheme for Wireless Rechargeable Sensor Networks in an Urban Bus System. Electronics 2022, 11, 1464. https://doi.org/10.3390/electronics11091464
Lin T-L, Chang H-Y, Wang Y-H. A Novel Unmanned Aerial Vehicle Charging Scheme for Wireless Rechargeable Sensor Networks in an Urban Bus System. Electronics. 2022; 11(9):1464. https://doi.org/10.3390/electronics11091464
Chicago/Turabian StyleLin, Tu-Liang, Hong-Yi Chang, and Yu-Hsin Wang. 2022. "A Novel Unmanned Aerial Vehicle Charging Scheme for Wireless Rechargeable Sensor Networks in an Urban Bus System" Electronics 11, no. 9: 1464. https://doi.org/10.3390/electronics11091464
APA StyleLin, T.-L., Chang, H.-Y., & Wang, Y.-H. (2022). A Novel Unmanned Aerial Vehicle Charging Scheme for Wireless Rechargeable Sensor Networks in an Urban Bus System. Electronics, 11(9), 1464. https://doi.org/10.3390/electronics11091464