
A Systematic Review on Oral Interactions in Robot-Assisted Language Learning



Abstract
1. Introduction
1.1. Scope and Definitions
1.2. The Review Study
- RQ1:
- What language teaching methods are incorporated in the design of oral interactions in RALL?
- RQ2:
- Which types of oral interaction task design are employed in RALL?
- RQ3:
- What roles do robots and instructors fulfill when facilitating oral interactions in RALL?
- RQ4:
- What are the learning outcomes of RALL oral interactions in terms of learners’ cognition, language skills, and affect?
2. Literature Review
2.1. Oral Interactions in Language Classrooms
2.2. Affordances of Educational Robots for Language Learning
2.3. Human-Robot Interaction in RALL
2.4. Applying Language Teaching Methods in Interactive Design in RALL
3. Methods
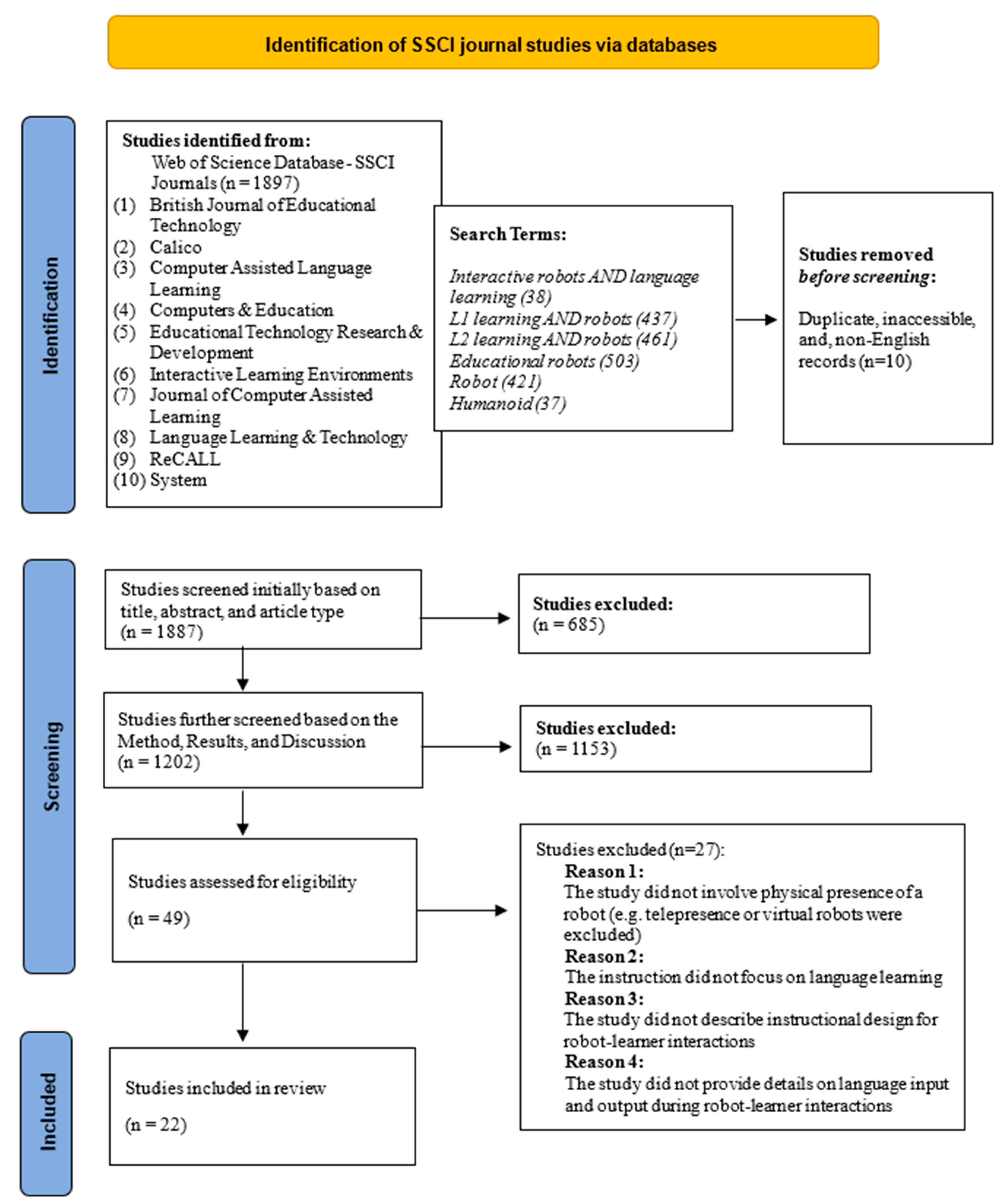
3.1. Search Strategy
3.2. Study Selection
3.3. Eligibility: Inclusion/Exclusion Criteria
- The study must present physical use of robots;
- The study must focus on language learning;
- The study must employ rigorous methodology with sufficient details;
- The study must report about robot-learner interactions in detail, including the specific language input and output during the interactions.
3.4. Data Extraction
3.5. Tabulations
3.6. Synthesis
4. Results
4.1. General Characteristics
4.2. Language Methods Used in RALL Oral Interactions (RQ1)
4.3. Task Design for Oral Interactions in RALL (RQ2)
4.4. Role of Robots and Instructors (RQ3)
4.5. Learning Outcomes of RALL Oral Interactions (RQ4)
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Authors and Year | Country/Language TL = Target Language | Participant Profile | Implementation Duration | Research Purpose | Robot Type and Affordances | Sensors and Accompanying Tools | Research Design | Instruments |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Kanda, Hirano, Eaton, and Ishiguro, 2004 [36] | Japan L1: Japanese TL: English | 119 first-grade students and 109 sixth-grade students | 2 weeks | Analyze the effect of the robots on social interaction over time and learning | Humanoid robot/Robovie
|
| Single-group experiment with pretest–posttest design | Quantitative:
|
| 2 | Han, Jo, Jones, and Jo, 2008 [35] | Korea L1: Korean TL: English | 90 fifth to sixth graders | Forty minutes | Investigate if the effect of the use of home robots in children’s learning is more effective for their concentration, learning interest, and academic achievement than the other two types of instructional media | Humanoid robot/ IROBI
|
| Between-group experiment | Quantitative:
|
| 3 | Chang, Lee, Chao, Wang, and Chen, 2010 [32] | Taiwan L1: Mandarin TL: An unspecified second language | 100 fifth graders | 5 weeks | Explore the possibility of using robots to teach a second language | Humanoid Robot
| Unknown | Quasi-experimental intervention | Qualitative:
|
| 4 | Chen, Quadir, and Teng, 2011 [44] | Taiwan L1: Mandarin TL: English | 5 EFL fifth graders | 80 min | Investigate the effect of the integration of book, digital content, and robots on elementary school students’ English learning | Humanoid robot (pedagogical social agent)
|
| Test-driven experiment:System design and implementation | Qualitative:
|
| 5 | Lee, Noh, Lee, Lee, Lee, Sagong, and Kim, 2011 [45] | South Korea L1: Korean TL: English | 21 EFL third to fifth graders | Eight weeks | Investigate the effect of RALL on elementary school students | Animal-like robots (Mero and Engkey)
| -RFID sensors | Single-group experiment with pretest–posttest design | Quantitative:
|
| 6 | Hsiao, Chang, Lin, and Hsu, 2015 [38] | Taiwan L1: Mandarin TL: Mandarin | 57 pre-kindergarteners | 11 months | Explore the influence of of educational robots on fostering kindergarteners’ reading motivation literacy, and behavior | Humanoid robot/iRobiQ
| -Infrared sensors | Between-group experiment | Quantitative:
|
| 7 | Tanaka and Matsuzoe, 2012 [40] | Japan L1: Japanese TL: English | 18 preschool students | Phase 1: Six daysPhase 2: one month | Investigate the effect of care-receiving robots on preschool students’ vocabulary learning | Humanoid robot/NAO (care-receiving robot)
|
| Single-group experiment with pretest–posttest design | Quantitative:
|
| 8 | Wang, Young, and Jang, 2013 [50] | Taiwan L1: Mandarin TL: English | 63 fifth graders | Not vailable | Investigate the effectiveness of tangible learning companions on students’ English conversation | Animal-like robot
| Unknown | Quasi-experiment | Quantitative:
|
| 9 | Alemi, Meghadari, and Ghazisaedy, 2014 [42] | Iran L1: Iranian TL: English | 46 seventh graders | Five weeks | Investigate the effect of RALL on students’ vocabulary learning and retention | Humanoid robot/ NAO
|
| Quasi-experiment | Quantitative:
|
| 10 | Alemi, Meghdari, and Ghazisaedy, 2015 [48] | Iran L1: Iranian TL: English | Seventy female students between 12 and 13 years of age in junior high | 5 weeks | Examine the effect of robot-assisted language learning (RALL) on anxiety level and attitude in English vocabulary acquisition | Humanoid robot/ NAO
| Tablet for display
| Between-group experiment | Quantitative:
|
| 11 | Mazzoni and Benvenuti, 2015 [46] | Italy L1: Italian TL: English | 10 preschool students | Three days | Investigate whether humanoid robots can assist students in learning English as effective as a human counterpart in terms of social-cognitive conflict paradigm | Humanoid robot/MecWilly
| Sensors for recognizing human language | Between-group experiment | Quantitative:
|
| 12 | Wu, Wang, and Chen, 2015 [34] | Taiwan L1: Mandarin TL: English | 64 EFL third graders | 200 min | Investigate the effect of in-house built teaching assistant robots on EFL elementary school students’ English learning | Humanoid robot/ PET
| LEDs(head, face, ears, arms) | Between-group experiment | Quantitative:
|
| 13 | Hong, Huang, Hsu, and Shen, 2016 [39] | Taiwan L1: Mandarin TL: English | 52 fifth graders | Not available | Investigate the effects of design robot-assisted instructional materials on elementary school students’ learning performance | Humanoid robot/Bioloid
|
| Between-group experiment | Quantitative:
|
| 14 | Lopes, Engwell, and Skantze, 2017 [47] | Sweden L1: 14 different mother tongues TL: Swedish | 22 L2 Swedish learners (average age 29.1) | Two 15 min interactions | Explore using a social robot in a conversational setting to practice a second language | Humanoid Robot/ Furhat
|
| Quantitative:
| |
| 15 | Westlund, Dickens, Jeong, Harris, DeSteno, and Breaseal, 2017 [41] | USA L1: English TL: English | 36 preschool students | Not available | Investigate the effects of non-verbal cues on children’s vocabulary learning | Animal-like robot/ DragonBot
|
| Single-subject experiment | Quantitative:
|
| 16 | Crompton, Gregory, and Burke, 2018 [33] | USA L1: English TL: English | Three teaching assistants and 50 preschool students | Not available | Investigate how the use of humanoid robots can support preschool students’ learning | Humanoid robot/ NAO
| Unknown | Ethnographic study design | Qualitative:
|
| 17 | Sisman, Gunay, and Kucuk, 2018 [62] | Turkey L1: Turkish TL: English | 232 secondary school students broken into small sessions of 20 students each | Four months | Investigate an educational robot attitude scale (ERAS) for secondary school students | Humanoid robot/ NAO
| UnknownMobile phone | Experiment with evaluation survey design | Quantitative:
|
| 18 | Lio, Maede, Ogawa, Yoshikawa, Ishiguro, Suzuki, Aoki, Maesaki, and Hama, 2019 [43] | Japan L1: Japanese TL: English | Nine university students | Seven days | Investigate the effect of RALL system on college students’ English-speaking development | Humanoid robot/ CommU
| UnknownTablet for display | Single-group experiment with pretest–posttest design | Quantitative:
|
| 19 | Wedenborn, Wik, Engwall, and Beskow, 2019 [63] | Sweden L1: Unknown TL: Russian | Fifteen university students | 15 min per participant | Investigate the effect of a physical robot on vocabulary learning | Humanoid Robot/ Furhat
| Java-basedframework for constructing multi-modal dialogue systems
| Quasi-experiment | Quantitative:
|
| 20 | Alemi and Haeri, 2020 [49] | Iran L1: Iranian TL: English | 38 kindergarteners | Two months | Investigate the impact of applying the robot-assisted language leaning (RALL) method to teach request and thanking speech acts to young children. | Humanoid robot/ NAO
| UnknownRobot Control Software:Choregraphe program
| Single-group experiment with pretest–posttest design | Quantitative:
|
| 21 | Engwell, Lopes, and Ålund, 2020 [51] | Sweden L1: Varied TL: Swedish | Robot-led Conversations:6 adults beyond tertiary education levelSurvey:32 participants | Three days | Investigate how the post-session ratings of the robot’s behavior along different dimensions are influenced by the robot’s interaction style and participant variables | Humanoid Robot/ Furhat
|
| Experiment with evaluation survey design | Quantitative:
|
| 22 | Leeuwestein, Barking, Sodacı, oudgenoeg, Verhagen Vogt, Aarts, Spit, Haas, Wit, and Leseman, 2020 [37] | Turkey L1: Turkish TL: Dutch | 67 kindergarteners | 2.4 days with 40 min sessions | Investigate the effects of providing translations in L1 on the learning of L2 in a vocabulary learning experiment using social robots | Humanoid robot/ NAO
| Unknown
| Single-group experiment with pretest–posttest design | Quantitative:
|
Appendix B
| Communicative Skill | Learning Activity | Language Teaching Method | Role of Robot | Role of Instructor or Facilitator | Learning Outcomes | |
|---|---|---|---|---|---|---|
| 1 | Vocabulary | Engaging students in learning a vocabulary of about 300 sentences for speaking and 50 words for recognition with 18 day trial. |
| Dialogue interlocutor Play Mate | Teacher/facilitator is absent/not mentioned | Skill:
|
| 2 | Speaking | Engaging the students in speaking and dialogue with NCB, WBI, or HRL for about 40 min |
| Role-play character | Teacher/facilitator is absent/not mentioned | Cognition:
|
| 3 | Listening Speaking | Five weekly practice scenarios each with a different interaction mode |
| Role-play character Action commander | Learning support:
| Affect:
|
| 4 | Vocabulary | A system contains five RALL activities: students took turns to have a test drive on the system in a total amount of 40 min | Multimedia-enhanced instruction | Role-play character Dance- and sing-along partner | Teacher/facilitator is absent/not mentioned | Cognition:
|
| 5 | ListeningSpeaking:
| Engaging students in learning 68 English lessons in four different RALL classrooms |
| Role-Play Character (Sales clerk) | Technical support | Skills:
|
| 6 | Reading Vocabulary Grammar | Experimental group: read e-book with the aid of iRobiQ Control group: read e-book with the aid of tablet-PC |
| Content display on robot partner screen | Procedural support:
| Affect:
|
| 7 | Vocabulary | Engaging students in four verb-learning games with the aid of care-receiving robot for 30 min per section |
| Respondant to learners’ action commands | Procedural support:
| Skill:
|
| 8 | Speaking | Experimental group: engaging 32 students in practicing English conversation with tangible learning robot Control group: engaging 31 students in practicing English conversation with classmates |
| Dialogue interlocutorDance- and sing-along partner | Procedural support:
| Skill:
|
| 9 | Vocabulary | Experimental group: learn English vocabulary from humanoid robot Control group: learn English vocabulary from human teachers |
| Dialogue interlocutorTeacher assistant | Procedural support:
| Skill:
|
| 10 | Vocabulary | Experimental group: learn English vocabulary through the RALL system Control group: learning English vocabulary based on the Communicative Approach |
| Dialogue interlocutorTeacher assistant(show vocabulary-related motions) | Procedural support:
| Affect:
|
| 11 | Vocabulary | Experimental group: learn English vocabulary in children-SCC condition Control group: learning English vocabulary in robot-SCC condition |
| Dialogue interlocutor (remotely controlled) | Procedural support:
| Cognition:
|
| 12 | English Alphabets Listening Speaking | Experimental group: learn English with PET Control group: learn English with human teacher |
| Teacher assistantDialogue interlocutorRole-play character | Learning support:
| Skill:
|
| 13 | Listening Speaking Reading Writing | Experimental group: have English class by humanoid robot Control group: have English class by human teacher |
| Role-play characterDialogue interlocutor | Learning support:
| Skill:
|
| 14 | Speaking | Experimental group: have conversational setting to practice with two second language learners, one native moderator and a human Control group: Have conversational setting to practice with two second language learners, one native moderator and a robot n |
| Dialogue interlocutor | Procedural support:
| Skill:
|
| 15 | Vocabulary | Engaging students in vocabulary learning with the aid of robot and human teacher |
| Picture viewing partner | Teacher/facilitator is absent/not mentioned | Cognition:
|
| 16 | Listening Speaking | Phase 1: panning RALL lessons Phase 2: RALL lessons implementation Phase 3: reflect on the process of designing and implementing RALL lessons |
| Dialogue interlocutor | Procedural support:
| Cognition:
|
| 17 | Listening Speaking | Engaging students in four robot-assisted English tasks for 40 min per class |
| Role-play character (remotely controlled) | Procedural support:
| Affect:
|
| 18 | Speaking | Engaging the students in speaking practices with the aid of RALL system for a total of 30 min per day for seven days |
| Dialogue interlocutor | Teacher/facilitator is absent/not mentioned | Skill:
|
| 19 | Vocabulary | Learn vocabulary exercises in three different conditions:First condition: disembodied voiceSecond condition: screenThird condition: robot |
| Teacher assistant | Learning support:
| Cognition:
|
| 20 | Speaking Vocabulary | Experimental group: learn English with a humanoid robot and the teacher Control group: learn English with the teacher |
| Dialogue interlocutor Teacher assistant | Learning support:
| Affect:
|
| 21 | Speaking | Engaging the students in four stereotypic interaction styles with social robot Furhat for three days |
| Role-play character Dialogue interlocutor | Teacher/facilitator is absent/not mentioned | Affect:
|
| 22 | Vocabulary | Engaging students in vocabulary learning with the monolingual or the bilingual robot for 40 min |
| Role-play character | Teacher/facilitator is absent/not mentioned | Skill:
|
Appendix C
| No. | Interactive Task Design | Interaction Mode | Instructional Focus | Teacher Talk by Robot | Input Mode | Oral Output |
|---|---|---|---|---|---|---|
| 1 |
| Robot–learner
| Form-focused | Skill training:
| Aural:
|
|
| 2 |
| Robot–learner
| Form-focused | Skill training:
| Visual:
|
|
| 3 |
| Robot–learner
| Form-focused:Meaning-focused | Knowledge teaching:
| Aural
|
|
| 4 |
| Robot–learner
| Form-focused | Knowledge teaching:
| Linguistic:
|
|
| 5 |
| Robot–learner
| Meaning-focused | Motivational elements:
| Aural:
|
|
| 6 |
| Robot–learner
| Form-focused | Skill training:
| Visual:
|
|
| 7 |
| Robot–learner
| Meaning-focused | Procedural prompts | Linguistic:
|
|
| 8 |
| Robot–learner
| Meaning-focused | Skill training:
| Aural:
|
|
| 9 |
| Robot–learner
| Meaning-focused | Knowledge teaching:
| Visual:
|
|
| 10 |
| Robot–learner
| Form-focused | Knowledge teaching:
| Aural:
|
|
| 11 |
| Robot–learner
| Form-focused | Motivational elements:
| Visual:
|
|
| 12 |
| Robot–learner
| Form-focused and meaning-focused | Knowledge teaching:
| Visual:
|
|
| 13 |
| Robot–learner
| Form-focused | Skill training:
| Aural:
|
|
| 14 |
| Robot–learner
| Meaning-focused | Skill training:
| Aural:
|
|
| 15 |
| Robot–learner(remote human control of robot)
| Form-focused | Knowledge teaching:
| Visual:
|
|
| 16 |
| Robot–learner
| Form-focused | Skill training:
| Aural:
|
|
| 17 |
| Robot–learner(remote human control of robot)
| Meaning-focused | Skill training:
| Aural:
|
|
| 18 |
| Robot–learner
| Form-focused | Skill training
| Linguistic:
|
|
| 19 |
| Robot–learner
| Form-focused | Skill training:
| Linguistic:
|
|
| 20 |
| Robot–learner
| Meaning-focused | Skill training:
| Visual:
|
|
| 21 |
| Robot–learner
| Meaning-focused | Skill training:
| Visual:
|
|
| 22 |
| Robot–learner
| Form-focused | Knowledge teaching:
| Visual:
|
|
References
- Kory-Westlund, J.M.; Breazeal, C. A long-term study of young children’s rapport, social emulation, and language learning with a peer-like robot playmate in preschool. Front. Robot. AI 2019, 6, 1–17. [Google Scholar] [CrossRef]
- Liao, J.; Lu, X.; Masters, K.A.; Dudek, J.; Zhou, Z. Telepresence-place-based foreign language learning and its design principles. Comput. Assist. Lang. Learn. 2019. [Google Scholar] [CrossRef]
- So, W.C.; Cheng, C.H.; Lam, W.Y.; Wong, T.; Law, W.W.; Huang, Y.; Ng, K.C.; Tung, H.C.; Wong, W. Robot-based play-drama intervention may improve the narrative abilities of Chinese-speaking preschoolers with autism spectrum disorder. Res. Dev. Disabil. 2019, 95, 103515. [Google Scholar] [CrossRef]
- Alemi, M.; Bahramipour, S. An innovative approach of incorporating a humanoid robot into teaching EFL learners with intellectual disabilities. Asian-Pac. J. Second Foreign Lang. Educ. 2019, 4, 10. [Google Scholar] [CrossRef]
- Han, J. Robot-Aided Learning and r-Learning Services. In Human-Robot Interaction; Chugo, D., Ed.; IntechOpen: London, UK, 2010; Available online: https://www.intechopen.com/chapters/8632 (accessed on 5 July 2021).
- Spolaor, N.; Benitti, F.B.V. Robotics applications grounded in learning theories on tertiary education: A systematic review. Comput. Educ. 2017, 112, 97–107. [Google Scholar] [CrossRef]
- Cheng, Y.W.; Sun, P.C.; Chen, N.S. The essential applications of educational robot: Requirement analysis from the perspectives of experts, researchers and instructors. Comput. Educ. 2018, 126, 399–416. [Google Scholar] [CrossRef]
- Merkouris, A.; Chorianopoulos, K. Programming embodied interactions with a remotely controlled educational robot. ACM Trans. Comput. Educ. 2019, 19, 1–19. [Google Scholar] [CrossRef]
- Kahlifa, A.; Kato, T.; Yamamoto, S. Learning effect of implicit learning in joining-in-type robot-assisted language learning system. Int. J. Emerg. Technol. 2019, 14, 105–123. [Google Scholar] [CrossRef]
- Warschauer, M.; Meskill, C. Technology and second language learning. In Handbook of Undergraduate Second Language Education; Rosenthal, J., Ed.; Lawrence Erlbaum: Mahwah, NJ, USA, 2000; pp. 303–318. [Google Scholar]
- Woo, D.J.; Law, N. Information and communication technology coordinators: Their intended roles and architectures for learning. J. Comput. Assist. Learn. 2020, 36, 423–438. [Google Scholar] [CrossRef]
- Grant, M.J.; Booth, A. A typology of reviews: An analysis of 14 review types and associated methodologies. Health Inf. Libr. J. 2009, 26, 91–108. [Google Scholar] [CrossRef]
- Samnani, S.S.S.; Vaska, M.; Ahmed, S.; Turin, T.C. Review Typology: The Basic Types of Reviews for Synthesizing Evidence for the Purpose of Knowledge Translation. J. Coll. Physicians Surg. Pak. 2017, 27, 635–641. [Google Scholar]
- Robinson, H.A. The Ethnography of Empowerment—The Transformative Power of Classroom Interaction, 2nd ed.; The Falmer Press; Taylor & Francis Inc.: Bristol, PA, USA, 1994. [Google Scholar]
- Pica, T. From input, output and comprehension to negotiation, evidence, and attention: An overview of theory and research on learner interaction and SLA. In Contemporary Approaches to Second Language Acquisition; Mayo, M.D.P.G., Mangado, M.J.G., Martínez-Adrián, M., Eds.; John Benjamins Publishing Company: Philadelphia, PA, USA, 2013; pp. 49–70. [Google Scholar]
- Rivers, W.M. Interactive Language Teaching; Cambridge University Press: New York, NY, USA, 1987. [Google Scholar]
- Tuan, L.T.; Nhu, N.T.K. Theoretical review on oral interaction in EFL classrooms. Stud. Lit. Lang. 2010, 1, 29–48. [Google Scholar]
- Council of Europe. The Common European Framework of Reference for Languages: Learning, Teaching, Assessment; Council of Europe: Strasbourg Cedex, France, 2004; Available online: http://www.coe.int/T/DG4/Linguistic/Source/Framework_EN.pdf (accessed on 6 July 2021).
- Brown, H.D. Teaching by Principles: Interactive Language Teaching Methodology; Prentice Hall Regents: New York, NY, USA, 1994. [Google Scholar]
- Ellis, R. Instructed Second Language Acquisition: Learning in the Classroom; Basil Blackwell. Ltd.: Oxford, UK, 1990. [Google Scholar]
- Han, J. Emerging technologies: Robot assisted language learning. Lang. Learn. Technol. 2012, 16, 1–9. [Google Scholar]
- Van den Berghe, R.; Verhagen, J.; Oudgenoeg-Paz, O.; van der Ven, S.; Leseman, P. Social Robots for Language Learning: A Review. Rev. Educ. Res. 2019, 89, 259–295. [Google Scholar] [CrossRef]
- Jahnke, I.; Liebscher, J. Three types of integrated course designs for using mobile technologies to support creativity in higher education. Comput. Educ. 2020, 146, 103782. [Google Scholar] [CrossRef]
- Mitchell, C.B.; Vidal, K.E. Weighing the ways of the flow: Twentieth century language instruction. Mod. Lang. J. 2001, 85, 26–38. [Google Scholar] [CrossRef]
- Asher, J. The Total Physical Response Approach to Second Language Learning. Mod. Lang. J. 1969, 53, 3–17. [Google Scholar] [CrossRef]
- Muzammil, L.; Andy, A. Teaching proficiency through reading and storytelling (TPRS) as a technique to foster students’ speaking skill. J. Engl. Educ. Linguist. Stud. 2017, 4, 19–36. [Google Scholar] [CrossRef][Green Version]
- Chen, Y.M. How a teacher education program through action research can support English as a foreign language teachers in implementing communicative approaches: A case from Taiwan. Sage Open 2020, 10, 2158244019900167. [Google Scholar] [CrossRef]
- Savignon, S.J. Communicative competence. TESOL Encycl. Engl. Lang. Teach. 2018, 1, 1–7. [Google Scholar]
- Bagheri, M.; Hadian, B.; Vaez-Dalili, M. Effects of the Vaughan Method in Comparison with the Audiolingual Method and the Communicative Language Teaching on Iranian Advanced EFL Learners’ Speaking Skill. Int. J. Instr. 2019, 12, 81–98. [Google Scholar] [CrossRef]
- Lin, V.; Liu, G.Z.; Hwang, G.J.; Chen, N.S.; Yin, C. Outcomes-based appropriation of context-aware ubiquitous technology across educational levels. Interact. Learn. Environ. 2019. [Google Scholar] [CrossRef]
- Petticrew, M.; Roberts, H. Systematic Reviews in the Social Sciences: A Practical Guide; Blackwell: Oxford, UK, 2006. [Google Scholar]
- Chang, C.W.; Lee, J.H.; Chao, P.Y.; Wang, C.Y.; Chen, G.D. Exploring the Possibility of Using Humanoid Robots as Instructional Tools for Teaching a Second Language in Primary School. Educ. Technol. Soc. 2010, 13, 13–24. [Google Scholar]
- Crompton, H.; Gregory, K.; Burke, D. Humanoid robots supporting children’s learning in early childhood setting. Br. J. Educ. Technol. 2018, 49, 911–927. [Google Scholar] [CrossRef]
- Wu, W.C.V.; Wang, R.J.; Chen, N.S. Instructional design using an in-house built teaching assistant robot to enhance elementary school English-as-a-foreign-language learning. Interact. Learn. Environ. 2015, 23, 696–714. [Google Scholar] [CrossRef]
- Han, J.; Jo, M.; Jones, V.; Jo, J.H. Comparative Study on the Educational Use of Home Robots for Children. J. Inf. Processing Syst. 2008, 4, 159–168. [Google Scholar] [CrossRef]
- Kanda, T.; Hirano, T.; Eaton, D.; Ishiguro, H. Interactive robots as social partners and peer tutors for children: A field trial. Hum.-Comput. Interact. 2004, 19, 61–84. [Google Scholar]
- Leeuwestein, H.; Barking, M.; Sodacı, H.; Oudgenoeg-Paz, O.; Verhagen, J.; Vogt, P.; Aarts, R.; Spit, S.; Haas, M.D.; Wit, J.D.; et al. Teaching Turkish-Dutch kindergartners Dutch vocabulary with a social robot: Does the robot’s use of Turkish translations benefit children’s Dutch vocabulary learning? J. Comput. Assist. Learn. 2020, 37, 603–620. [Google Scholar] [CrossRef]
- Hsiao, H.S.; Chang, C.S.; Lin, C.Y.; Hsu, H.L. “iRobiQ”: The influence of bidirectional interaction on kindergarteners’ reading motivation, literacy, and behavior. Interact. Learn. Environ. 2015, 23, 269–292. [Google Scholar] [CrossRef]
- Hong, Z.W.; Huang, Y.M.; Hsu, M.; Shen, W.W. Authoring robot-assisted instructional materials for improving learning performance and motivation in EFL classrooms. Educ. Technol. Soc. 2016, 19, 337–349. [Google Scholar]
- Tanaka, F.; Matsuzoe, S. Children teach a care-receiving robot to promote their learning: Field experiments in a classroom for vocabulary learning. J. Hum.-Robot. Interact. 2012, 1, 78–95. [Google Scholar] [CrossRef]
- Westlund, J.M.K.; Dickens, L.; Jeong, S.; Harris, P.L.; DeSteno, D.; Breaseal, C.L. Children use non-verbal cues to learn new words from robots as well as people. Int. J. Child-Comput. Interact. 2017, 13, 1–9. [Google Scholar] [CrossRef]
- Alemi, M.; Meghdari, A.; Ghazisaedy, M. Employing humanoid robots for teaching English language in Iranian junior high-schools. Int. J. Hum. Robot. 2014, 11, 1450022. [Google Scholar] [CrossRef]
- Lio, T.; Maede, R.; Ogawa, K.; Yoshikawa, Y.; Ishiguro, H.; Suzuki, K.; Aoki, T.; Maesaki, M.; Hama, M. Improvement of Japanese adults’ English speaking skills via experiences speaking to a robot. J. Comput. Assist. Learn. 2019, 35, 228–245. [Google Scholar] [CrossRef]
- Chen, N.S.; Quadir, B.; Teng, D.C. Integrating book, digital content and robot for, enhancing elementary school students’ learning of English. Aust. J. Educ. Technol. 2011, 27, 546–561. [Google Scholar] [CrossRef]
- Lee, S.; Noh, H.; Lee, J.; Lee, K.; Lee, G.G.; Sagong, S.; Kim, M. On the effectiveness of robot-assisted language learning. ReCALL 2011, 23, 25–58. [Google Scholar] [CrossRef]
- Mazzoni, E.; Benvenuti, M. A robot-partner for preschool children learning English using socio-cognitive conflict. Educ. Technol. Soc. 2015, 18, 474–485. [Google Scholar]
- Lopes, J.; Engwell, O.; Skantze, G. A first visit to the robot language café. In Proceedings of the 7th ISCA Workshop on Speech and Language Technology in Education, Stockholm, Sweden, 25–26 August 2017; pp. 25–26. [Google Scholar]
- Alemi, M.; Meghdari, A.; Ghazisaedy, M. The impact of social robotics on L2 learners’ anxiety and attitude in English vocabulary acquisition. Int. J. Soc. Robot. 2015, 7, 523–535. [Google Scholar] [CrossRef]
- Alemi, M.; Haeri, N.S. Robot-assisted instruction of L2 pragmatics: Effects on young EFL learners’ speech act performance. Lang. Learn. Technol. 2020, 24, 86–103. [Google Scholar]
- Wang, Y.H.; Young, S.S.C.; Jang, J.S.R. Using tangible companions for enhancing learning English conversation. Educ. Technol. Soc. 2013, 16, 296–309. [Google Scholar]
- Engwell, O.; Lopes, J.; Ålund, A. Robot interaction styles for conversation practice in second language learning. Int. J. Soc. Robot. 2020, 13, 251–276. [Google Scholar] [CrossRef]
- Uriarte, A.B. Vocabulary teaching: Focused tasks for enhancing acquisition in EFL contexts. MEXTESOL J. 2013, 37, 1–12. [Google Scholar]
- Rios, J.A.; Ling, G.; Pugh, R.; Becker, D.; Bacall, A. Identifying critical 21st-century skills for workplace success: A content analysis of job advertisements. Educ. Res. 2020, 49, 80–89. [Google Scholar] [CrossRef]
- Lichtman, K. Teaching Proficiency through Reading and Storytelling (TPRS): An Input-Based Approach to Second Language Instruction; Routledge: New York, NY, USA, 2018. [Google Scholar]
- Neumann, M.M. Social robots and young children’s early language and literacy learning. Early Child. Educ. J. 2019, 48, 157–170. [Google Scholar] [CrossRef]
- Toh, L.P.E.; Causo, A.; Tzuo, P.W.; Chen, I.M.; Yeo, S.H. A Review on the Use of Robots in Education and Young Children. Educ. Technol. Soc. 2016, 19, 148–163. [Google Scholar]
- Papadopoulos, I.; Lazzarino, R.; Miah, S.; Weaver, T.B.; Koulouglioti, C.T. A systematic review of the literature regarding socially assistive robots in pre-tertiary education. Comput. Educ. 2020, 155, 103924. [Google Scholar] [CrossRef]
- Mubin, O.; Stevens, C.; Shahid, S.; Mahmud, A.; Dong, J.-J. A review of the applicability of robots in education. Technol. Educ. Learn. 2013, 1, 13. [Google Scholar] [CrossRef]
- Heidig, S.; Muller, J.; Reichelt, M. Emotional design in multimedia learning: Differentiation on relevant design features and their effects on emotions and learning. Comput. Hum. Behav. 2015, 44, 81–95. [Google Scholar] [CrossRef]
- Barrett, N.; Liu, G.Z. Global trends and research aims for English Academic Oral Presentations: Changes, challenges, and opportunities for learning technology. Rev. Educ. Res. 2016, 86, 1227–1271. [Google Scholar] [CrossRef]
- Lin, V.; Yeh, H.C.; Huang, H.H.; Chen, N.S. Enhancing EFL vocabulary learning with multimodal cues supported by an educational robot and an IoT-Based 3D book. System 2021, 104, 102691. [Google Scholar] [CrossRef]
- Sisman, B.; Gunay, D.; Kucuk, S. Development and validation of an educational robot attitude scale (ERAS) for secondary school students. Interact. Learn. Environ. 2018, 27, 377–388. [Google Scholar] [CrossRef]
- Wedenborn, A.; Wik, P.; Engwall, O.; Beskow, J. The effect of a physical robot on vocabulary Learning. arXiv 2019, arXiv:1901.10461. [Google Scholar]






| Code | Descriptor | Example Coded Item | Reference |
|---|---|---|---|
| Interactive Task Design | The type of task designed to engage learners in oral interactions (e.g., drill, question-and-answer, dialogue, role-play, action commands, acting out a story) | Drill: Recite
| [32] |
| Interaction Mode | The number of learners in the two-way robot-learner interaction (e.g., one-to-one or one-to-many) | Robot-Learner Interaction:
| [33] |
| Instructional Focus | Specific goal for learning the target language items—focus on form (e.g., accuracy) or focus on meaning (e.g., communicative competence) Opened = With open-ended answers Closed = With fixed answers | Form-Focused: Closed
| [34] |
| Teacher Talk by Robot | The type of teacher talk fulfilled by the robot, (e.g., knowledge teaching, skill training, procedural prompts, motivational elements, and affective feedback) | Knowledge Teaching:
| [34] |
| Input Mode | The type of multimodal input provided in the robot-assisted learning environment to facilitate the learners to acquire the target language (e.g., linguistic, visual, aural, audiovisual, and gestural/physical). | Visual:
| [35] |
| Oral Output | The complexity level of linguistic output produced by the learner during RALL oral interactions (e.g., phonemic, lexical, phrasal, or sentential level) with the possibility of closed or open answers | Phonemic level: Closed Lexical level: Closed Sentential level: Closed | [34] |
| Robot | Instructors/Facilitators | Learners |
|---|---|---|
Uni-Directional Output
| Directing the Robot
| Receptive Language Use
|
| Type of Cognition | Contributing Factor to Learners’ Cognitive Development |
|---|---|
| Retention | Dialogue interactions with the robot supported by multimodal stimuli on target vocaublary items |
| Identification | Using a robot to guide learners through a picture naming task improved the ability to detect the right word |
| Understanding | Effective robot e-learning contents lead to better concentration |
| Using an integrated robot learning system with pictures and animation visual aid helped learners understand new words | |
| Association | Working with a humanoid robot using the socio-cognitive conflict paradigm to induce the knowledge acquisition process leads to significant improvement in word–picture association abilities |
| Social-cognition | Humanoid robots have the advantage of creating scenarios similar to child–child social-cognitive conflict situations |
| Analysis | Students were intellectually curious when learning with the robot (e.g., generate questions about mathematics and science reasoning) |
| Application | Asking a robot to take action using action commands (e.g., drink, sweep, play, brush) |
| Language skill | Contributing factor to learners’ language development |
| Conversation | Repeated practice in comprehension and oral skills that resembled natural conversation |
| Vocabulary usage | Efficient learning of vocabulary (verbs) through teaching a robot to take actions or actual vocabulary use |
| Speaking, listening, and reading | Role-play and dialogue supported by principles of communicative language teaching, storytelling, total physical response, and audiolingual methods |
| Grammar accuracy | Focus on lexical items and sentence patterns in dialogues |
| Reading fluency | Focus on lexical items and sentence patterns in dialogues |
| Pronunciation | Focus on lexical items and sentence patterns in dialogues |
| Affective state | Keyword reflecting affective outcome through learners’ feedback |
| Eagerness | Eager to find out what the robot would say or do |
| Enthusiasm | Enthusiastic to participate in answering or interacting with the robot |
| Laughs | Laughing at silly robotic actions |
| Enjoyment | Enjoyed conversing with robot and that the robot understood what the learner said |
| Appreciation | Appreciative of learning a word and its pronunciation without having to look it up |
| Confidence | Confident to speak English |
| Satisfaction | Satisfied with the robot’s social interaction capabilities |
| Interest | Interested in learning English using robots |
| Likes | Liked playing with robots/Liked reading a book with robots/Liked one-on-one communication with robots |
| Encouragement | Encouraged by the happy atmosphere |
| Fun | The learning is a fun and interesting experience |
| Motivation | Highly motivated to study English using a robot |
| RQ # | Corresponding Findings |
|---|---|
| 1 | Communicative language teaching and teaching proficiency through reading and storytelling are often complemented by total physical response and audiolingual method, which train bottom-up oral interaction skills. |
| 2 | Applying communicative, meaning-based language learning principles, interactive oral tasks (e.g., dialogue, storytelling, role play) with robots were used to provide speaking practice with a focus on communicative competence instead of grammatical accuracy. |
| 3 | Robots’ roles included a dialogue interlocutor, role-play character, learning companion, teaching assistant; instructors’ roles included providing additional support such as procedural support, learning support, and technical support |
| 4 | Learning outcomes in RALL consisted of cognitive gains in target subject domains, skill-based improvements in various aspects of speaking, and a more exciting, enjoyable, fun, and encouraging affective learning experience |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, V.; Yeh, H.-C.; Chen, N.-S. A Systematic Review on Oral Interactions in Robot-Assisted Language Learning. Electronics 2022, 11, 290. https://doi.org/10.3390/electronics11020290
Lin V, Yeh H-C, Chen N-S. A Systematic Review on Oral Interactions in Robot-Assisted Language Learning. Electronics. 2022; 11(2):290. https://doi.org/10.3390/electronics11020290
Chicago/Turabian StyleLin, Vivien, Hui-Chin Yeh, and Nian-Shing Chen. 2022. "A Systematic Review on Oral Interactions in Robot-Assisted Language Learning" Electronics 11, no. 2: 290. https://doi.org/10.3390/electronics11020290
APA StyleLin, V., Yeh, H.-C., & Chen, N.-S. (2022). A Systematic Review on Oral Interactions in Robot-Assisted Language Learning. Electronics, 11(2), 290. https://doi.org/10.3390/electronics11020290