
Coordinated Control of Voltage Balancers for the Regulation of Unbalanced Voltage in a Multi-Node Bipolar DC Distribution Network



Abstract
:1. Introduction
- The DC distribution system has fewer power conversion stages, which can reduce power losses [5];
- In a DC distribution system, renewable energy sources (RESs), electric vehicles and other DC loads are easier to join the power system [6];
- The DC distribution system can avoid the difficulty of frequency and phase synchronization that the AC system often needs to consider [7].
- Compensation device: an electric spring (ES) is introduced as compensation equipment in a bipolar DC distribution network;
- Switching device: serial and parallel automatic commutation switch methods are adopted to control the unbalanced voltage;
- Interconnection device: VSC and power flow controllers are interconnected with the bipolar DC distribution network to control the unbalanced voltage.
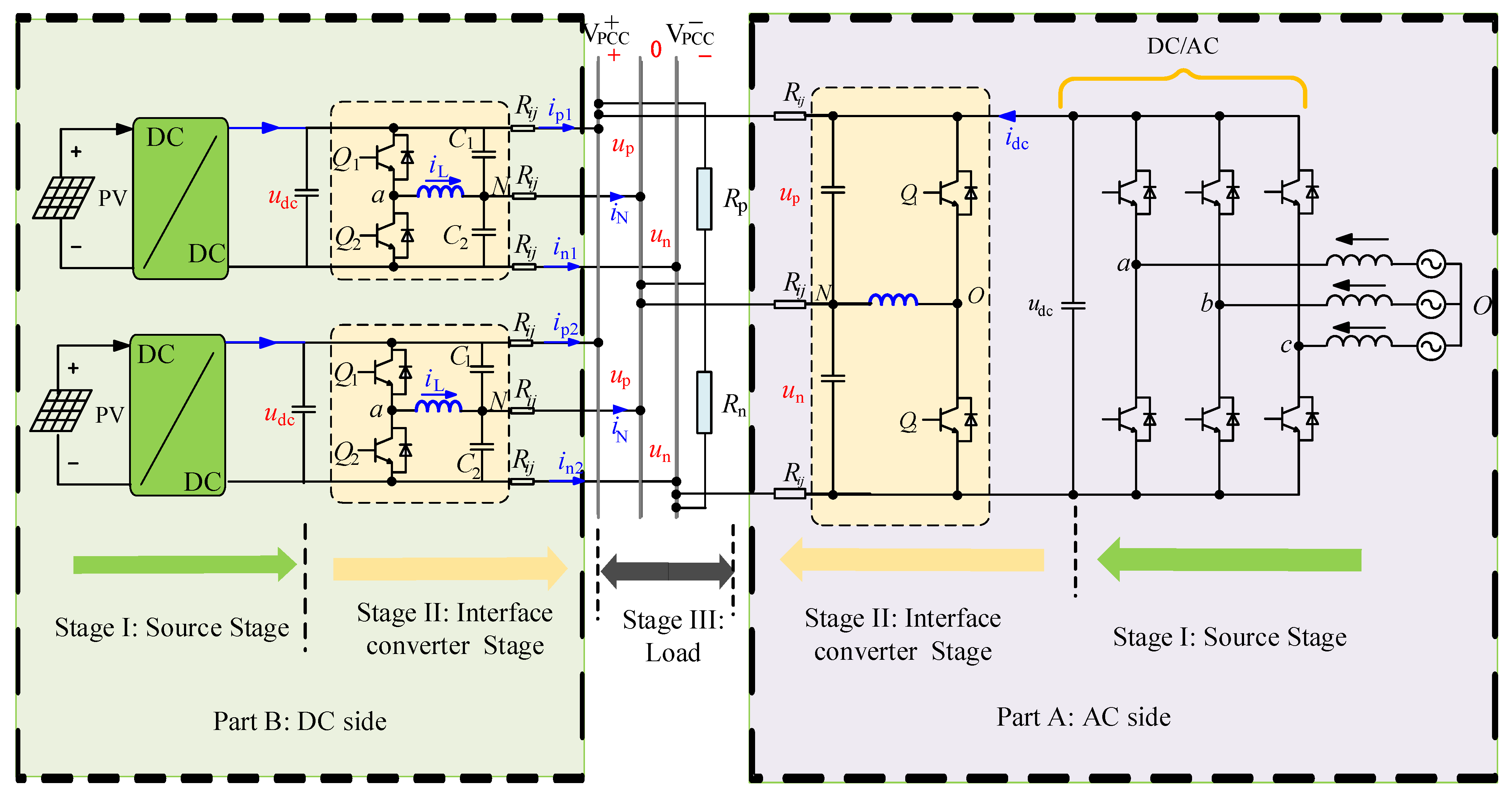
- A radial multi-node bipolar DC distribution network with multiple VBs is constructed. This radial grid structure has only one AC main power supply. The AC main power supply can be cut off when it fails, and the rest of the DC side can be used as an island system and operate independently.
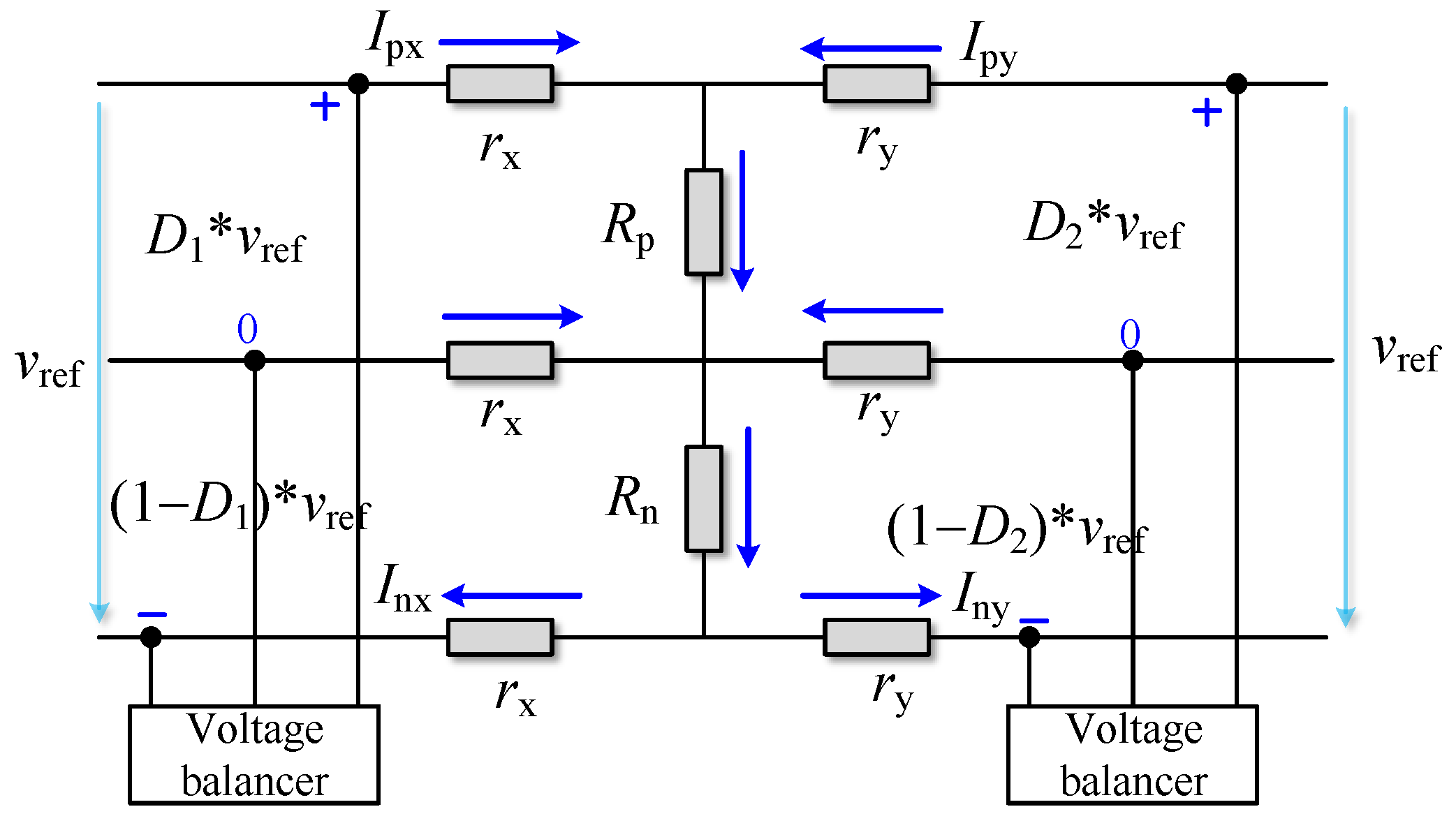
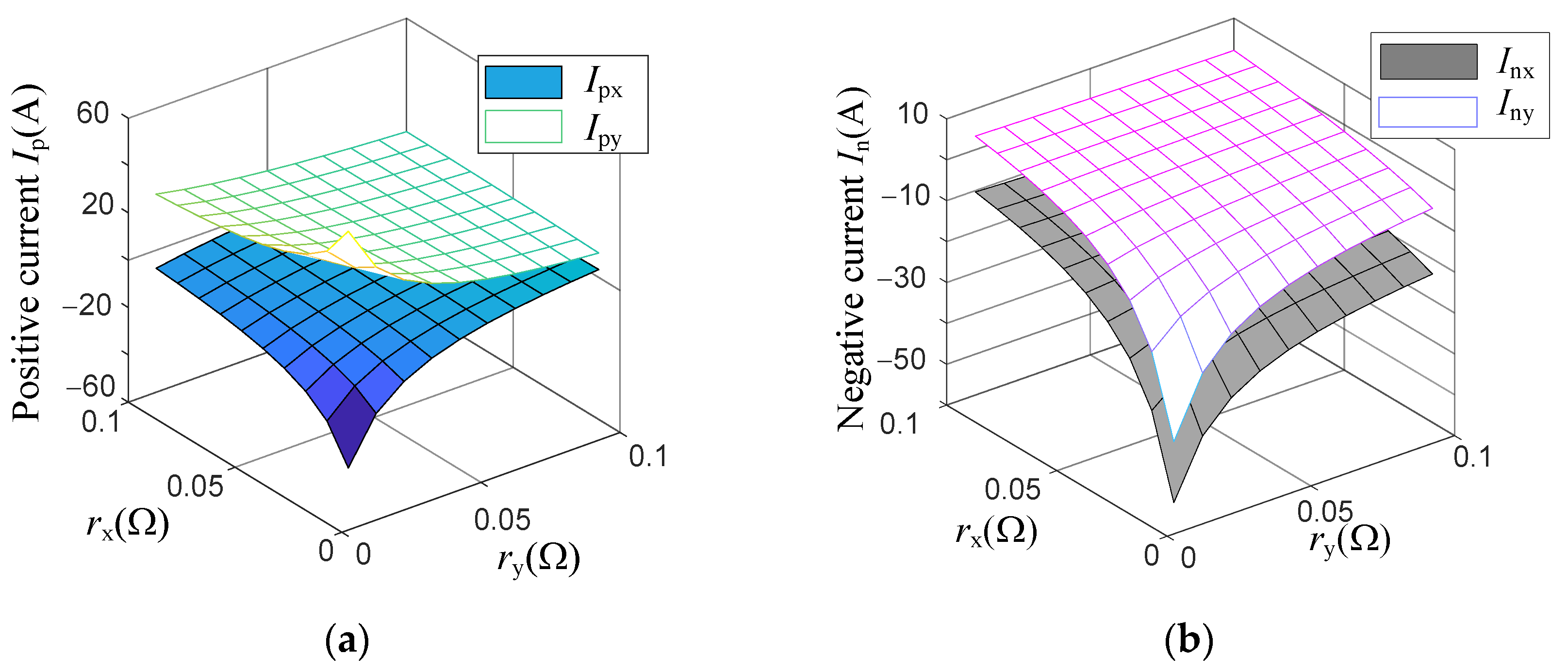
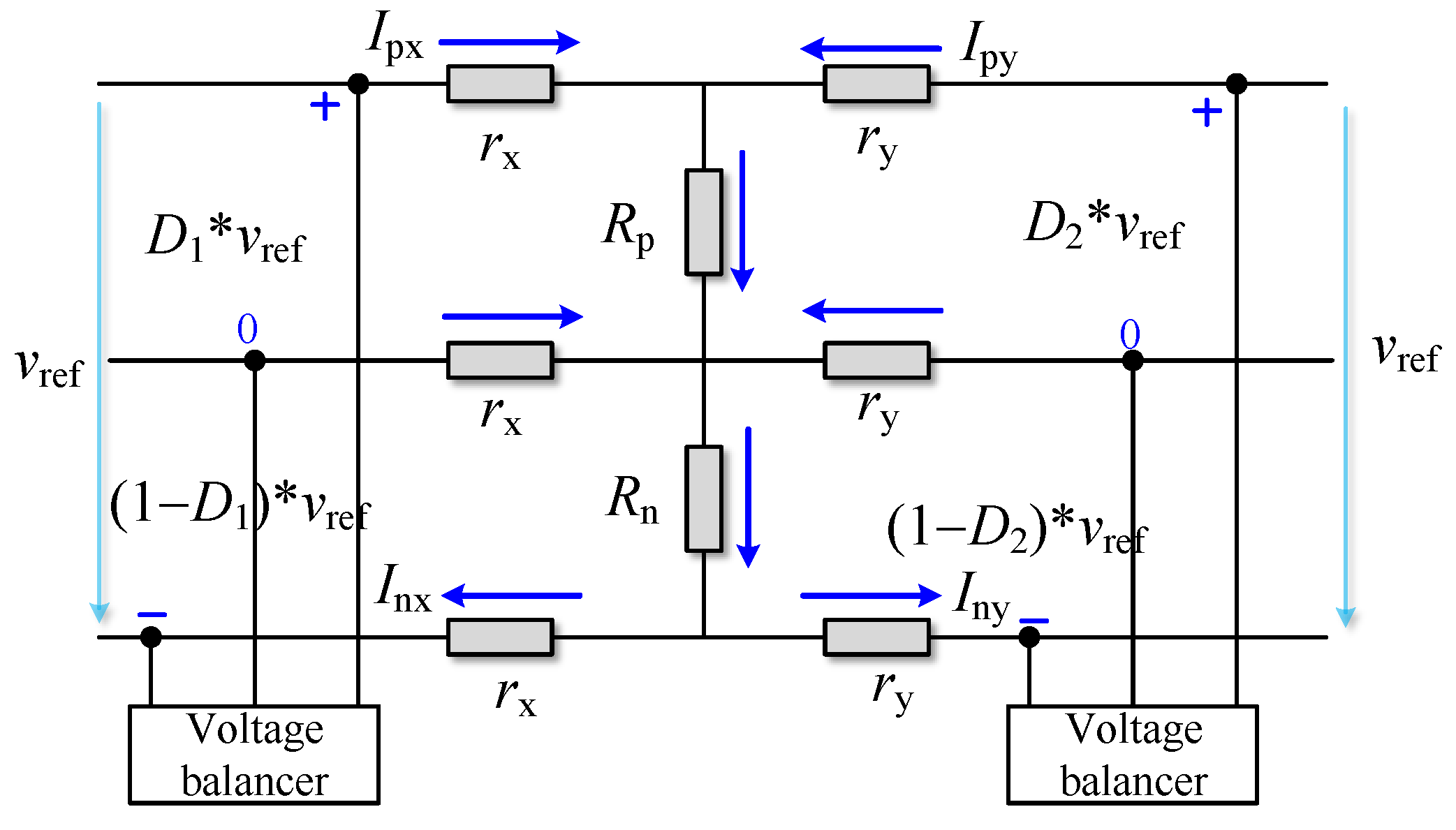
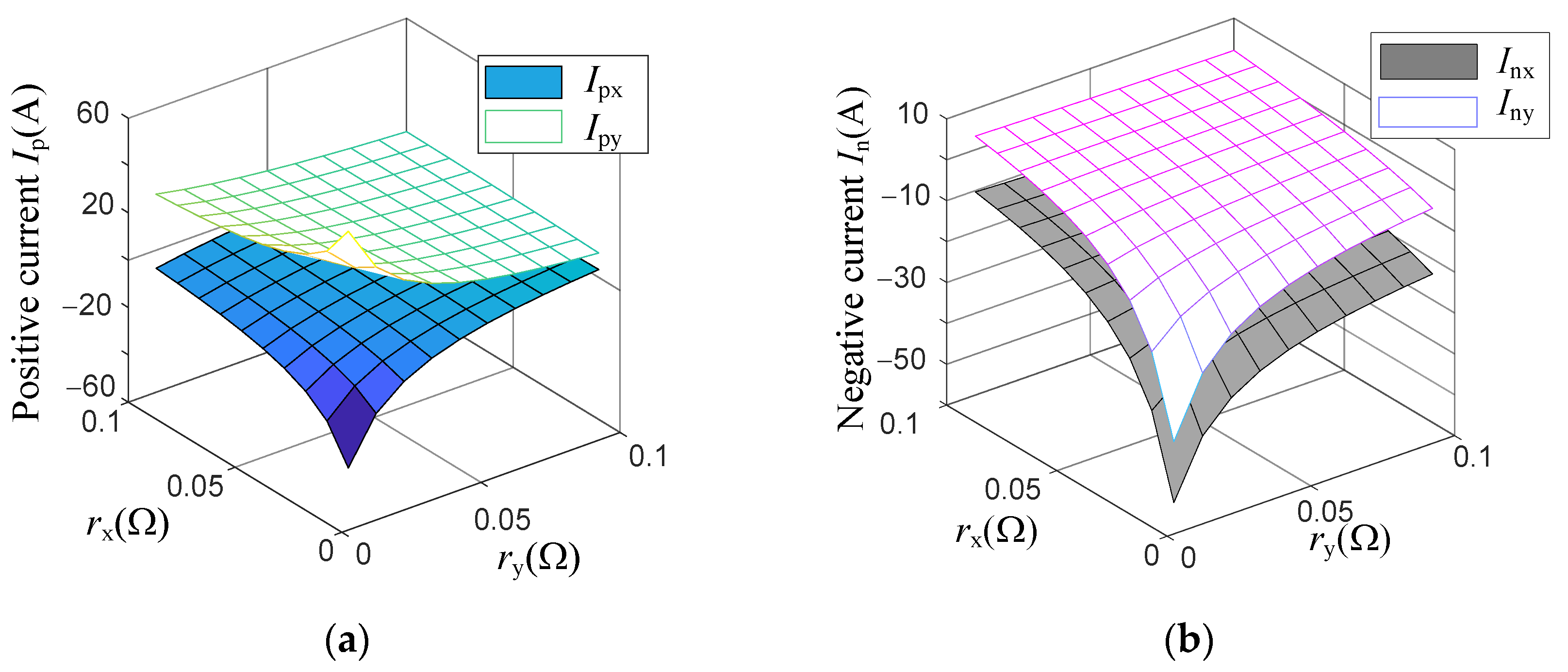
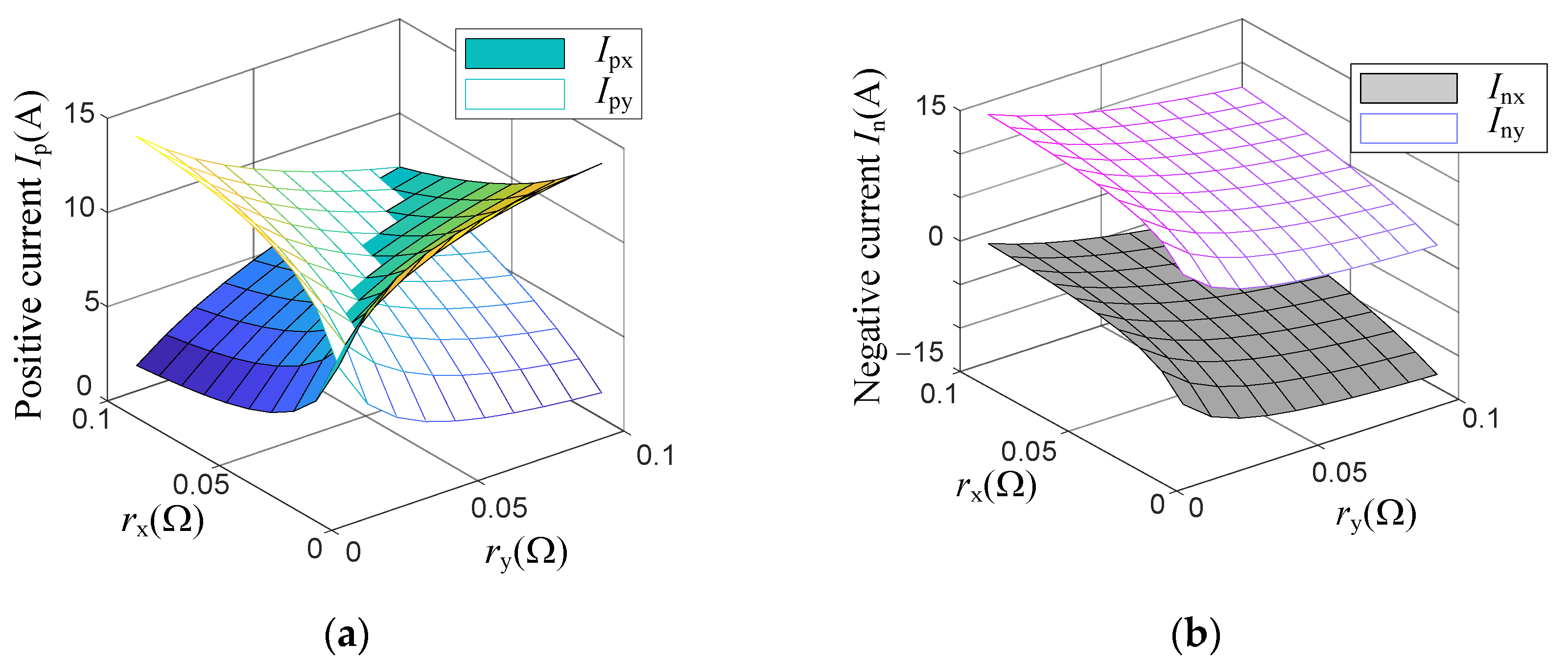
- The positive and negative current formula of the multi-node bipolar DC distribution network is derived, and the effects of the line resistance, load resistance, and VB switching duty ratio on the positive and negative current and stability of the system are discussed.
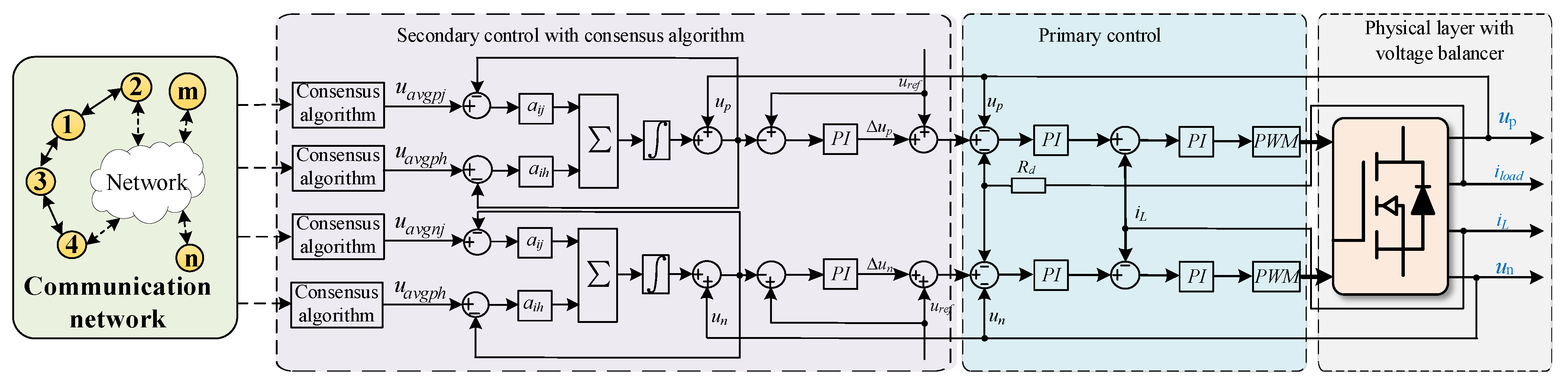
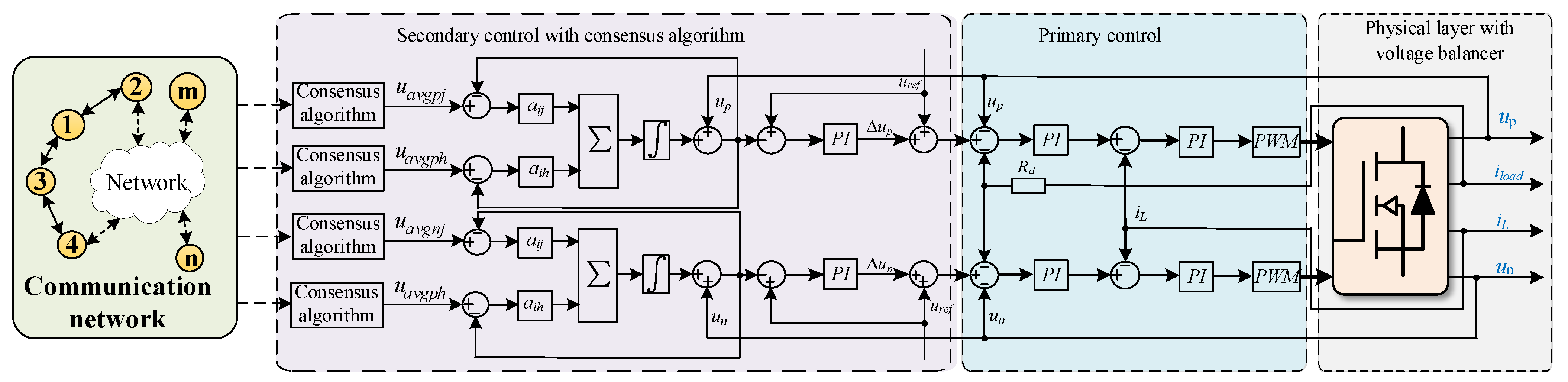
- The secondary control based on the consensus algorithm with a sparse communication network is applied in a radial multi-node bipolar DC distribution network. The droop coefficient of the primary control is adjusted, and the voltage of the VB is controlled to ensure the stable operation of the power system.
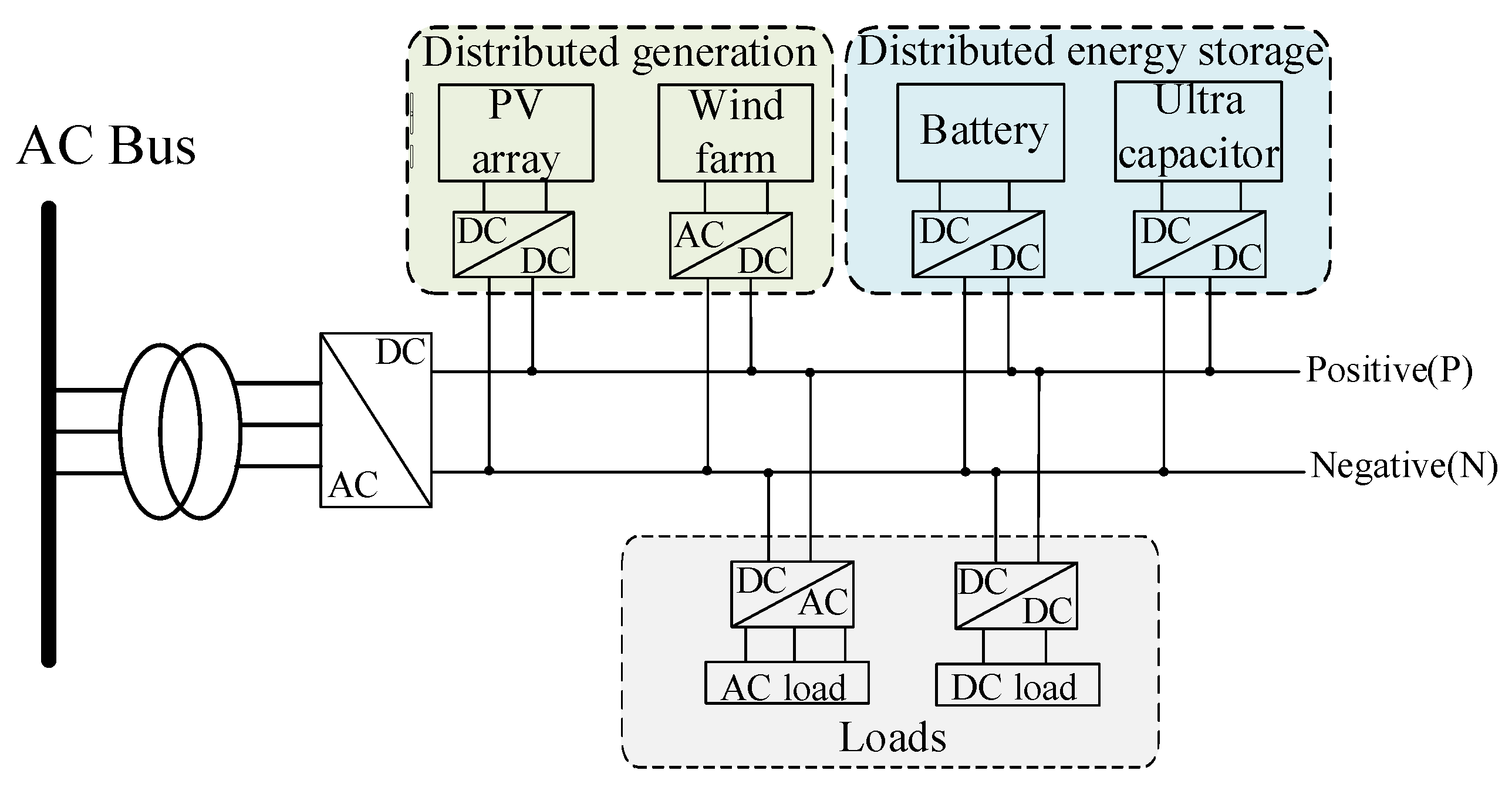
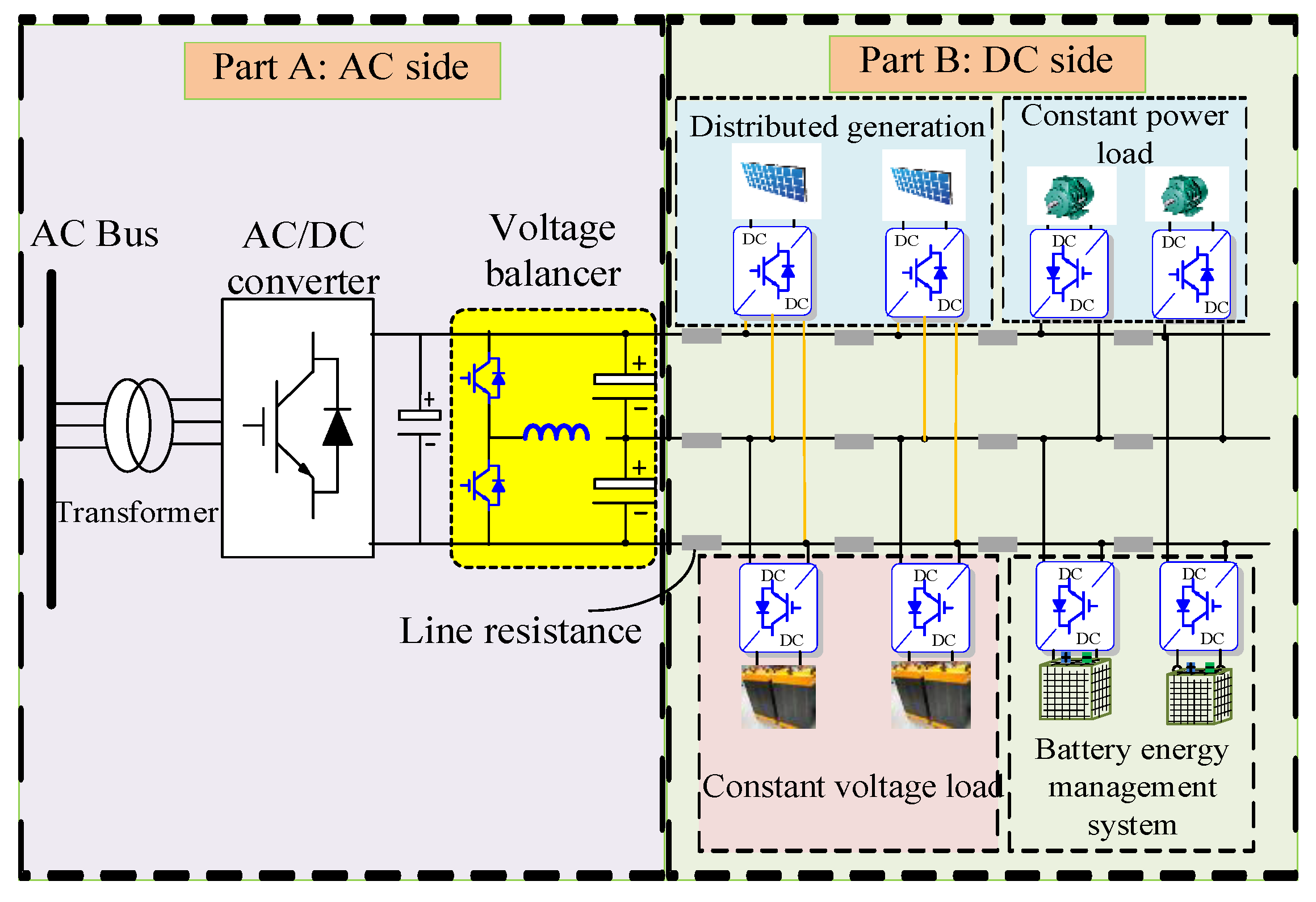
2. Configuration of the Bipolar DC Distribution Network and Discussion on the DC Bus Current
3. Design of Primary and Secondary Controllers for the Multi-Node Bipolar DC Distribution Network
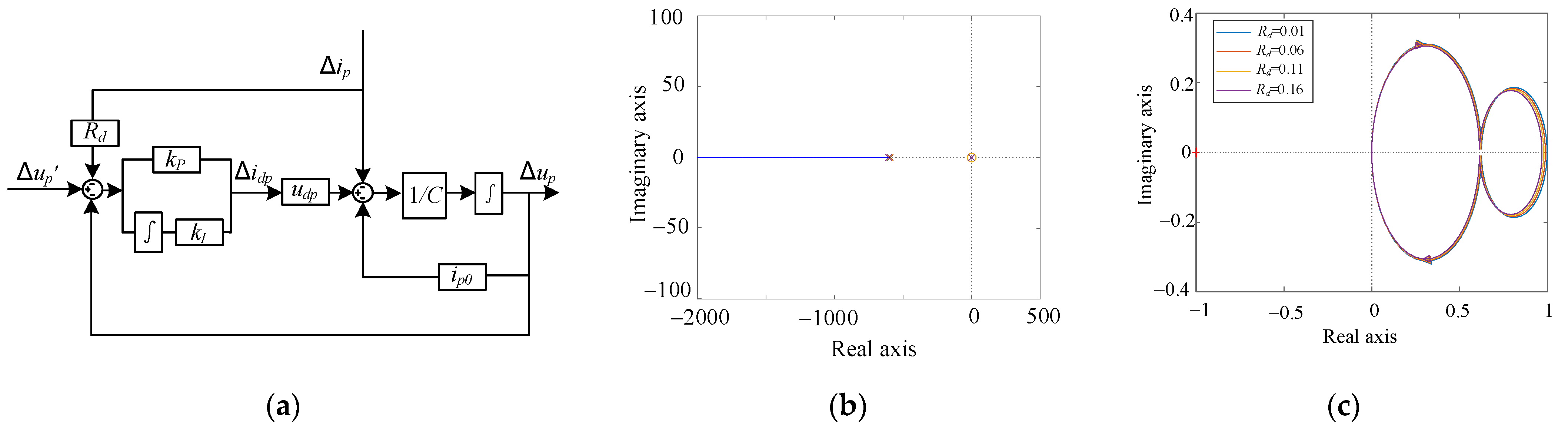
3.1. Small-Signal Analysis of the Voltage Balancer
3.2. Consensus Control of the Voltage Balancers in the Multi-Node Bipolar DC Distribution Network
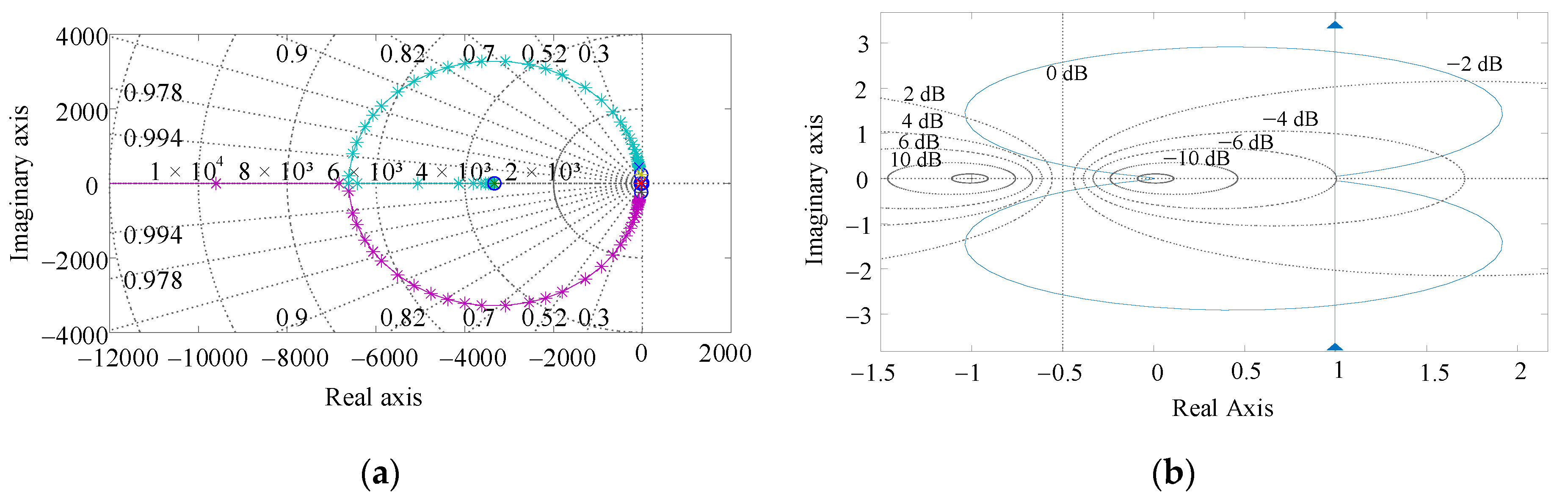
3.3. Stability Analysis of the Bipolar DC Distribution Network
4. Simulation Results
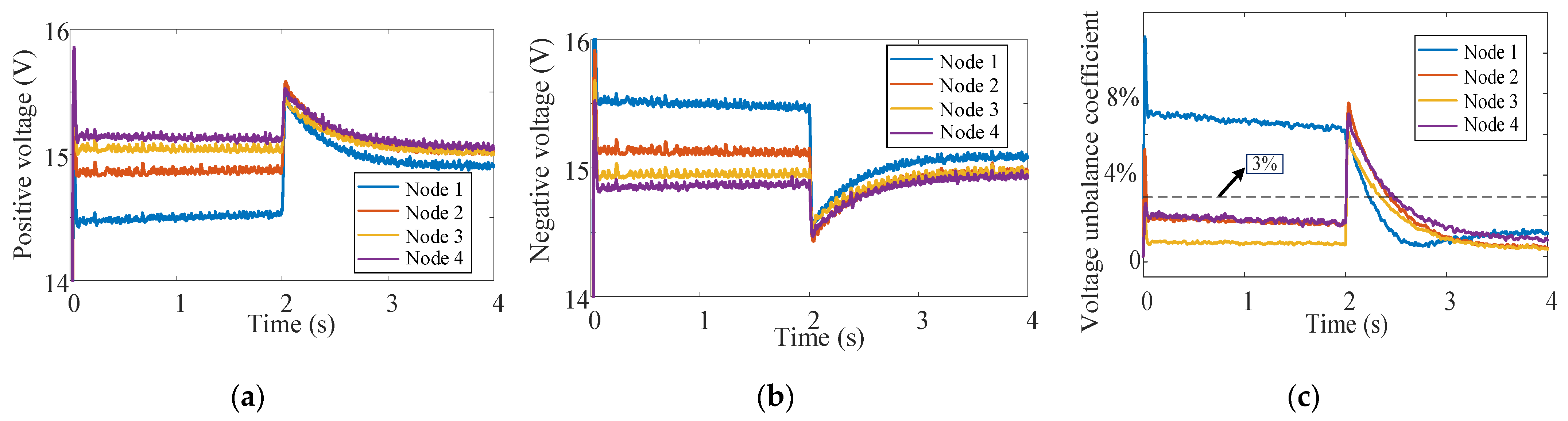
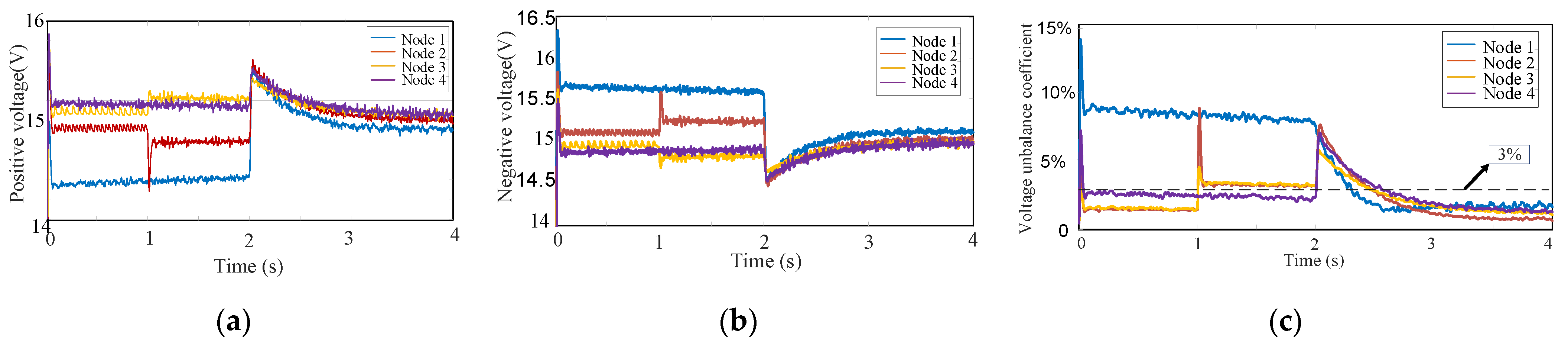
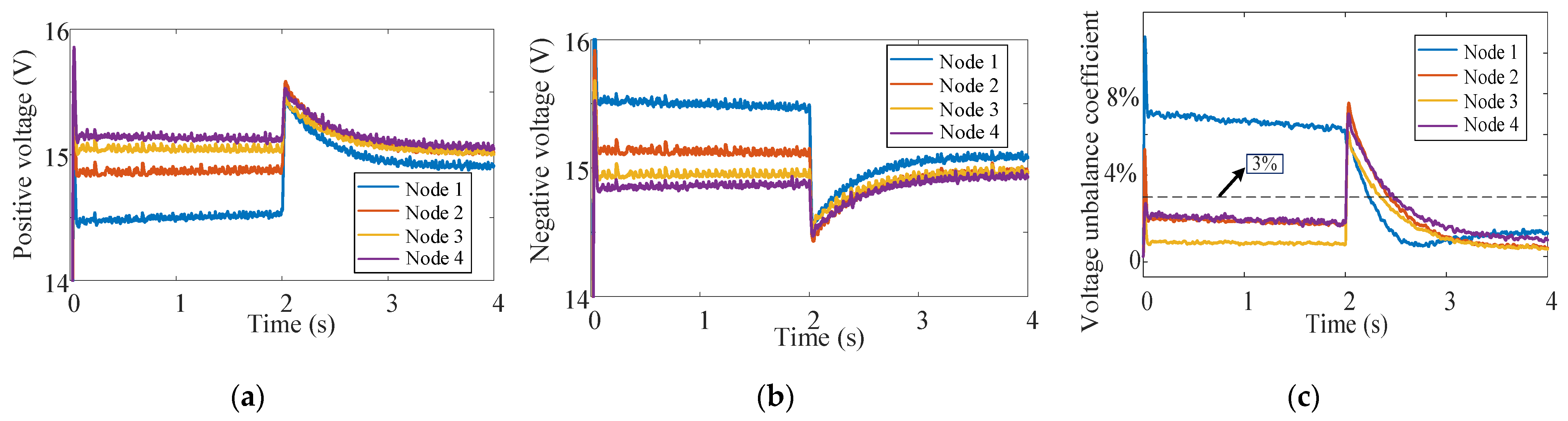
4.1. Comparison of the Results between Traditional Droop Control and Consensus Control
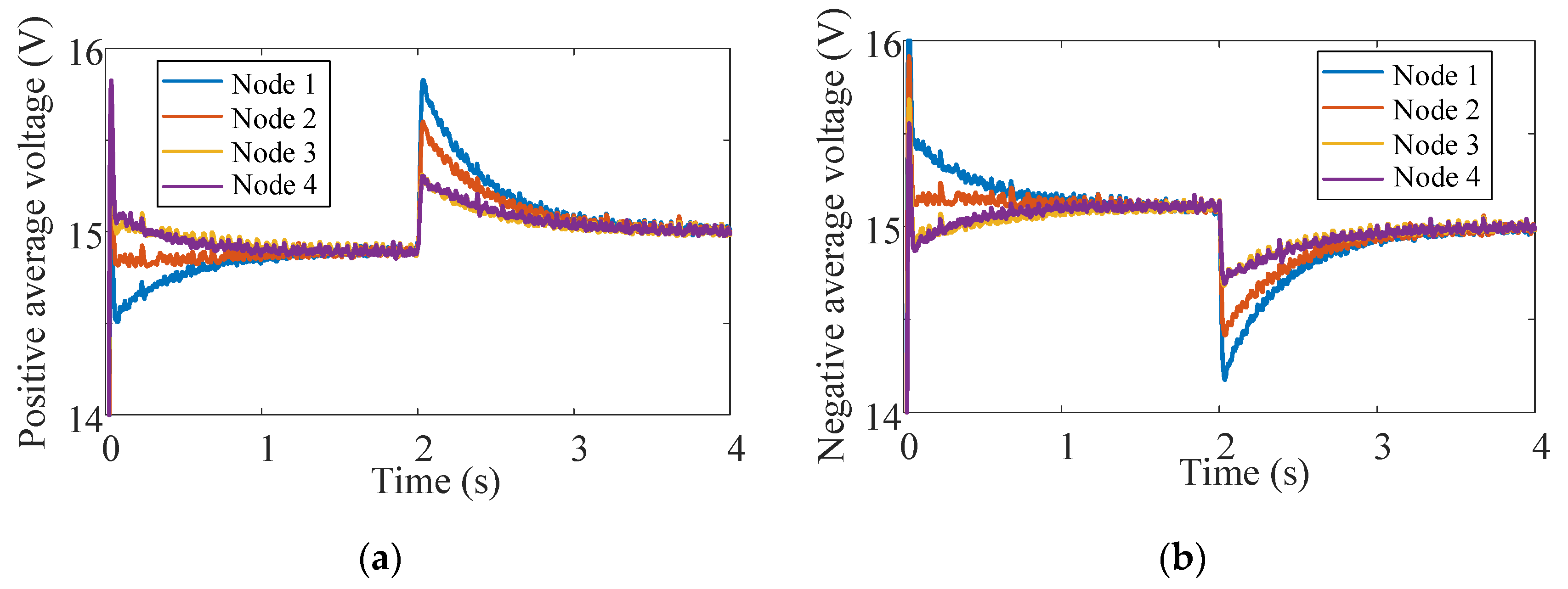
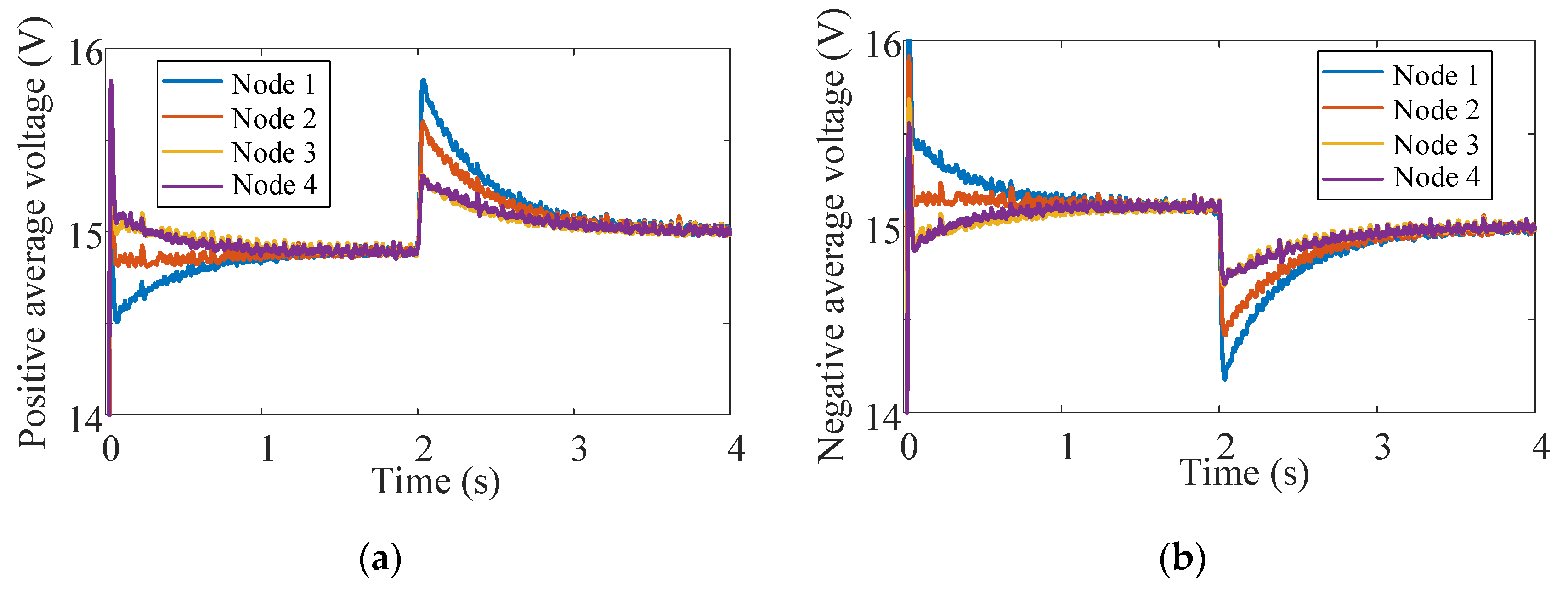
4.2. Effect of Consensus Control on the Average Output Voltage
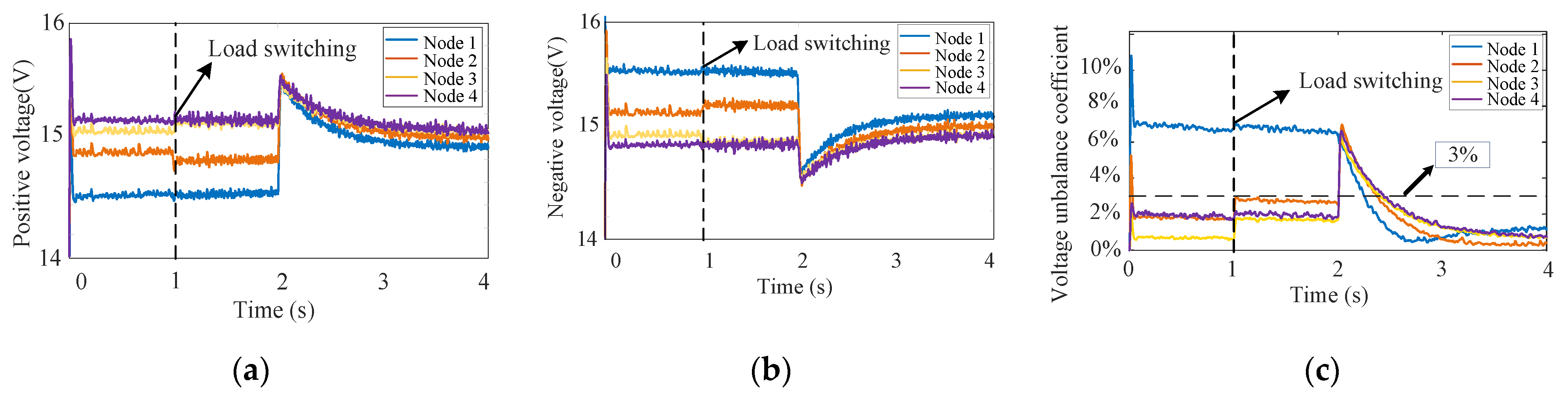
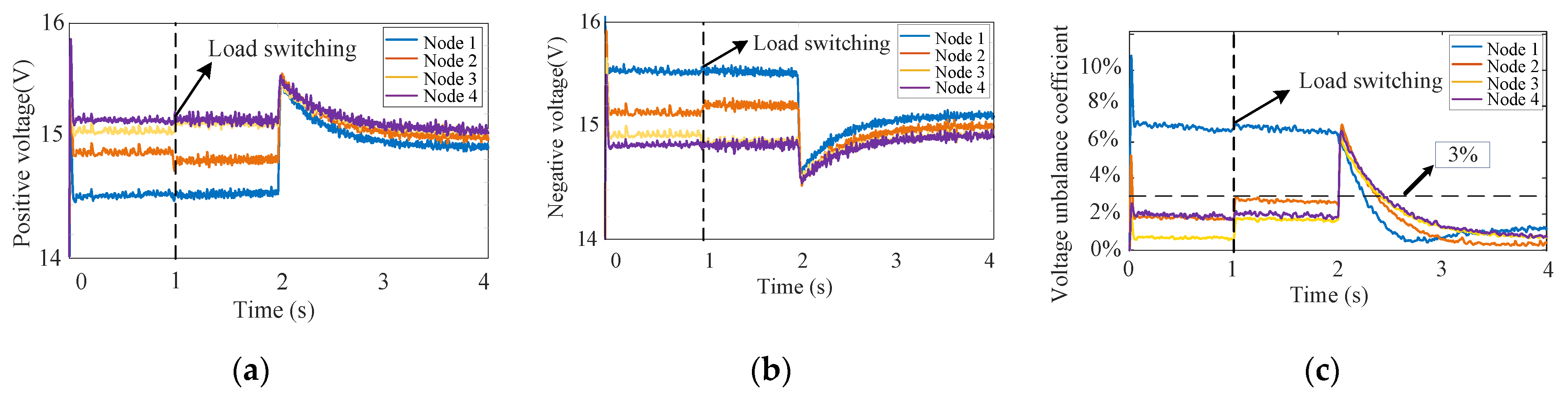
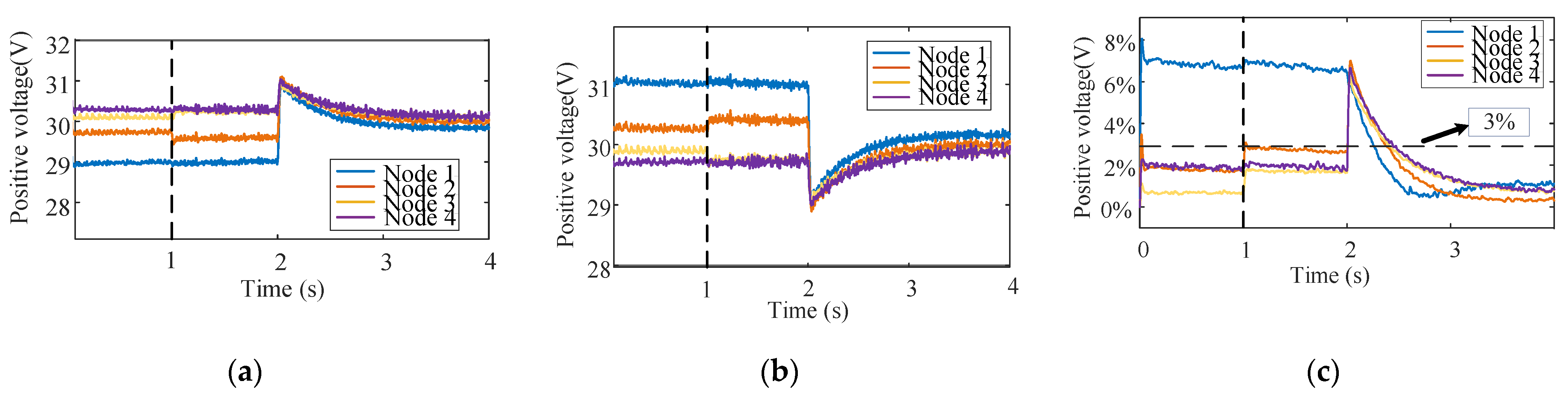
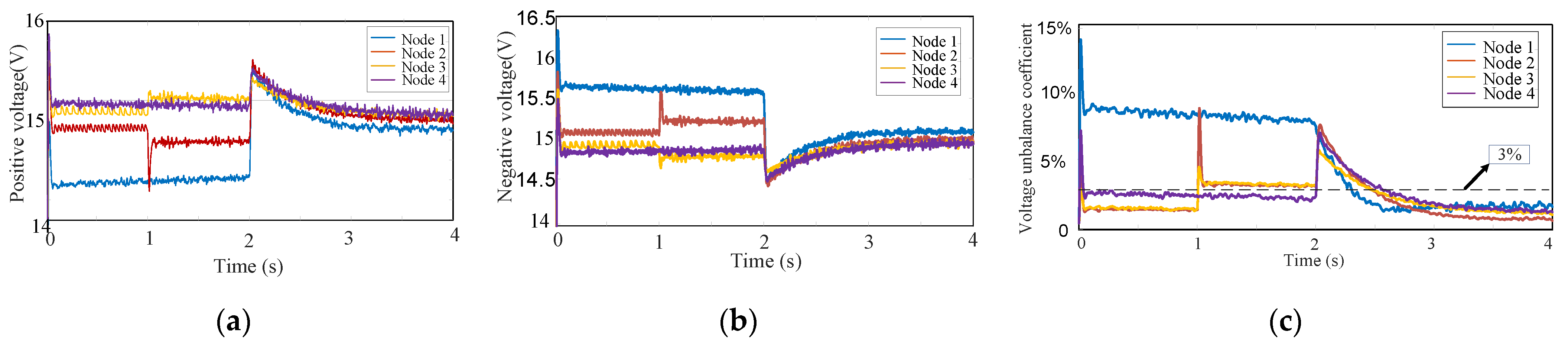
4.3. Influence of the Load Switching on the Multi-Node Bipolar DC Distribution Network
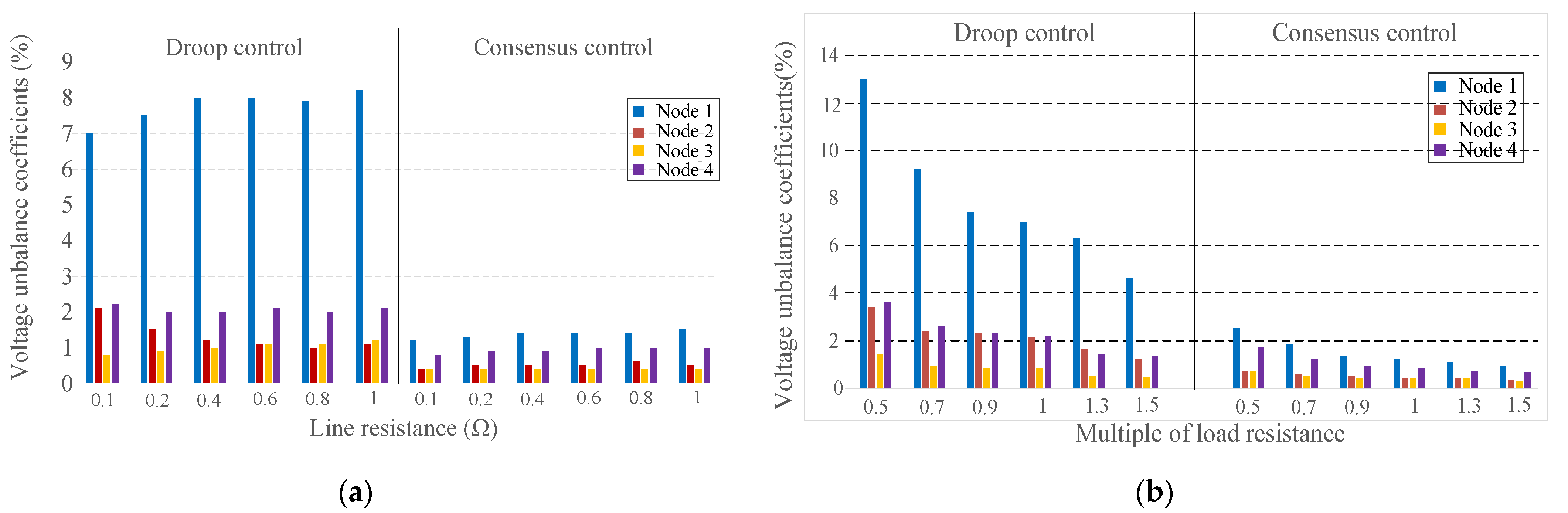
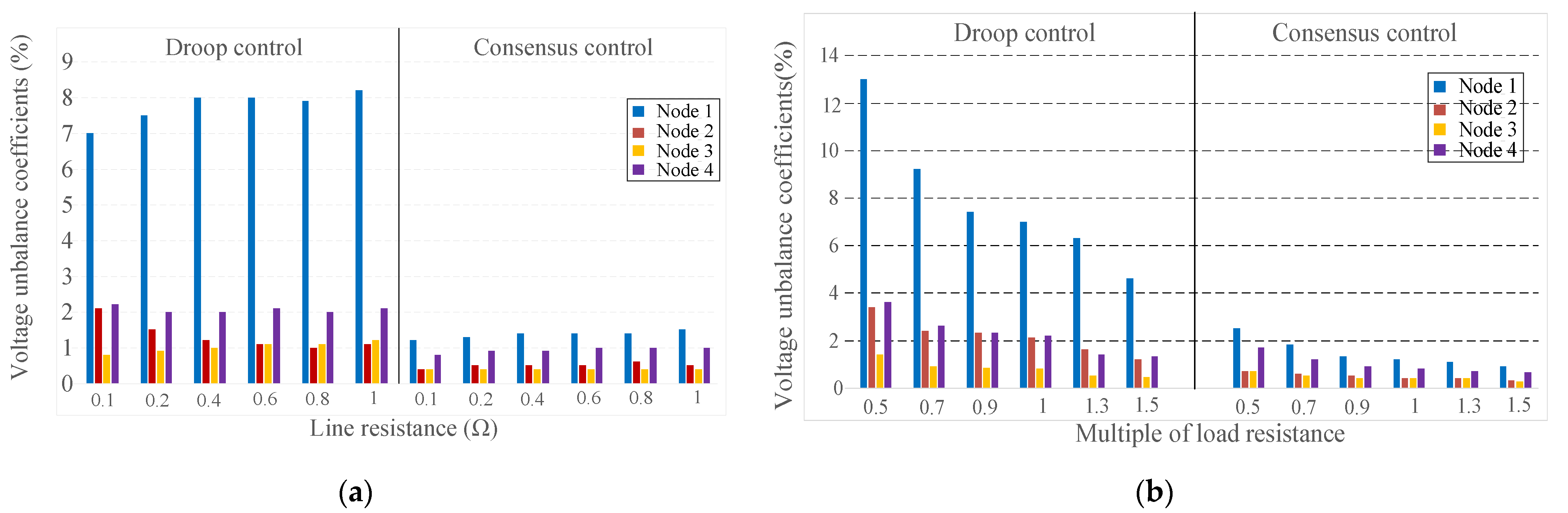
4.4. Effects of Consensus Control on the Excessive Line Resistance
4.5. The Adaptability of Consensus Control to Voltage Unbalance Coefficients
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Engelen, K.; Shun, E.L.; Vermeyen, P.; Pardon, I.; D’hulst, R.; Driesen, J.; Belmans, R. The Feasibility of Small-Scale Residential DC Distribution Systems. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 2618–2623. [Google Scholar]
- Gerber, D.L.; Vossos, V.; Feng, W.; Marnay, C.; Nordman, B.; Brown, R. A simulation-based efficiency comparison of AC and DC power distribution networks in commercial buildings. Appl. Energy 2018, 210, 1167–1187. [Google Scholar] [CrossRef] [Green Version]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef] [Green Version]
- Byun, H.-J.; Park, J.-M.; Kim, B.-J.; Kim, S.-H.; Won, C.-Y.; Yi, J.-S. Small Signal Modeling of Interleaved Voltage Balancer with Coupled-inductor. In Proceedings of the 2020 IEEE Electric Power and Energy Conference (EPEC), Edmonton, AB, Canada, 9–10 November 2020; pp. 1–6. [Google Scholar]
- Loh, P.C.; Li, D.; Chai, Y.K.; Blaabjerg, F. Hybrid AC–DC Microgrids with Energy Storages and Progressive Energy Flow Tuning. IEEE Trans. Power Electron. 2013, 28, 1533–1543. [Google Scholar] [CrossRef]
- Wang, F.; Lei, Z.; Xu, X.; Shu, X. Topology Deduction and Analysis of Voltage Balancers for DC Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 5, 672–680. [Google Scholar] [CrossRef]
- Kumar, M.; Srivastava, S.C.; Singh, S.N. Control Strategies of a DC Microgrid for Grid Connected and Islanded Operations. IEEE Trans. Smart Grid 2015, 6, 1588–1601. [Google Scholar] [CrossRef]
- Xu, M.; Ma, K.; Liu, B.; Cai, X. Modeling and Correlation of Two Thermal Paths in Frequency-Domain Thermal Impedance Model of Power Module. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3971–3981. [Google Scholar] [CrossRef]
- Ma, J.; Zhu, M.; Li, Q.; Cai, X. From “voltage balancer” to “interlinking converter”—A shift of operation concept for distributed bipolar DC system. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1166–1171. [Google Scholar]
- Rivera, S.; Wu, B.; Kouro, S.; Yaramasu, V.; Wang, J. Electric Vehicle Charging Station Using a Neutral Point Clamped Converter with Bipolar DC Bus. IEEE Trans. Ind. Electron. 2015, 62, 1999–2009. [Google Scholar] [CrossRef]
- Gu, Y.; Li, W.; He, X. Analysis and Control of Bipolar LVDC Grid with DC Symmetrical Component Method. IEEE Trans. Power Syst. 2016, 31, 685–694. [Google Scholar] [CrossRef]
- Kakigano, H.; Miura, Y.; Ise, T. Low-Voltage Bipolar-Type DC Microgrid for Super High Quality Distribution. IEEE Trans. Power Electron. 2010, 25, 3066–3075. [Google Scholar] [CrossRef]
- Cui, S.; Lee, J.-H.; Hu, J.; De Doncker, R.W.; Sul, S.-K. A Modular Multilevel Converter with a Zigzag Transformer for Bipolar MVDC Distribution Systems. IEEE Trans. Power Electron. 2019, 34, 1038–1043. [Google Scholar] [CrossRef]
- Prabhakaran, P.; Agarwal, V. Mitigation of voltage unbalance in a low voltage bipolar DC microgrid using a boost-SEPIC type interleaved dc-dc compensator. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Lee, J.-O.; Kim, Y.-S.; Moon, S.-I. Current Injection Power Flow Analysis and Optimal Generation Dispatch for Bipolar DC Microgrids. IEEE Trans. Smart Grid 2021, 12, 1918–1928. [Google Scholar] [CrossRef]
- Zhang, Z.; Shi, D.; Jin, C.; Koh, L.H.; Choo, F.H.; Wang, P.; Tang, Y. Droop control of a bipolar dc microgrid for load sharing and voltage balancing. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017–ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 795–799. [Google Scholar]
- Yang, X.; Yao, X.; Chen, B.; Lin, Z.; Yan, L. An enhanced reverse blocking MMC with DC fault handling capability for HVDC applications. Electr. Power Syst. Res. 2017, 163, 706–714. [Google Scholar] [CrossRef]
- Liao, J.; Zhou, N.; Wang, Q.; Luo, Y. A Bypass LCC-Based DC Fault Isolation Scheme for Bipolar MMC–HVDC. IEEE Access 2019, 7, 118218–118228. [Google Scholar] [CrossRef]
- Liao, J.; Zhou, N.; Huang, Y.; Wang, Q. Unbalanced Voltage Suppression in a Bipolar DC Distribution Network Based on DC Electric Springs. IEEE Trans. Smart Grid 2020, 11, 1667–1678. [Google Scholar] [CrossRef]
- Liao, J.; Zhou, N.; Huang, Y.; Wang, Q. Unbalanced Voltage Analysis and Suppression Method in a Radial Bipolar DC Distribution Network. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 5687–5702. [Google Scholar] [CrossRef]
- Liao, J.; Zhou, N.; Wang, Q.; Chi, Y. Load-Switching Strategy for Voltage Balancing of Bipolar DC Distribution Networks Based on Optimal Automatic Commutation Algorithm. IEEE Trans. Smart Grid 2021, 12, 2966–2979. [Google Scholar] [CrossRef]
- Broeck, G.V.D.; Martinez, W.; Vecchia, M.D.; Ravyts, S.; Driesen, J. Conversion Efficiency of the Buck Three-Level DC–DC Converter in Unbalanced Bipolar DC Microgrids. IEEE Trans. Power Electron. 2020, 35, 9306–9319. [Google Scholar] [CrossRef]
- Liao, J.; Qin, Z.; Purgat, P.; Zhou, N.; Wang, Q.; Bauer, P. Unbalanced Voltage/Power Control in Bipolar DC Distribution Grids Using Power Flow Controller. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 1290–1295. [Google Scholar]
- Alavi, S.A.; Mehran, K.; Vahidinasab, V.; Catalao, J.P.S. Forecast-Based Consensus Control for DC Microgrids Using Distributed Long Short-Term Memory Deep Learning Models. IEEE Trans. Smart Grid 2021, 12, 3718–3730. [Google Scholar] [CrossRef]
- Kumar, V.; Mohanty, S.R. Event Based Robust Action for Fault Restrained Secondary Control of DC Microgrid. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 15–18 August 2021; pp. 1379–1384. [Google Scholar]
- Mendis, N.; Muttaqi, K.; Perera, S. Management of Battery-Supercapacitor Hybrid Energy Storage and Synchronous Condenser for Isolated Operation of PMSG Based Variable-Speed Wind Turbine Generating Systems. IEEE Trans. Smart Grid 2014, 5, 944–953. [Google Scholar] [CrossRef]
- Ma, J.; Yan, L.; Miao, Z.; Xu, C. Parallel operation of distributed voltage balancers for bipolar DC system with improved reliability and efficiency. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Gwon, G.-H.; Kim, C.-H.; Oh, Y.-S.; Noh, C.-H.; Jung, T.-H.; Han, J. Mitigation of voltage unbalance by using static load transfer switch in bipolar low voltage DC distribution system. Int. J. Electr. Power Energy Syst. 2017, 90, 158–167. [Google Scholar] [CrossRef]
- ANSI Standard C84.1-1995 (R2001). American National Standard for Electric Power Systems Equipment—Voltage Ratings (60 Hertz); National Electrical Manufacturers Association: Rosslyn, VA, USA, 2006. [Google Scholar]
- Jung, T.-H.; Gwon, G.-H.; Kim, C.-H.; Han, J.; Oh, Y.-S.; Noh, C.-H. Voltage Regulation Method for Voltage Drop Compensation and Unbalance Reduction in Bipolar Low-Voltage DC Distribution System. IEEE Trans. Power Deliv. 2018, 33, 141–149. [Google Scholar] [CrossRef]
- You, X.; Liu, H.; Liao, J.; Huang, Y. An Active Damping Method for the Bipolar DC System Connected with Constant Power Loads. In Proceedings of the 2020 IEEE Electric Power and Energy Conference (EPEC), Edmonton, AB, Canada, 9–10 November 2020; pp. 1–6. [Google Scholar]
- Sharma, S.; Iyer, V.M.; Bhattacharya, S.; Kikuchi, J.; Zou, K. Tertiary Control Method for Droop Controlled DC-DC converters in DC Microgrids. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 694–699. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | The Branch Methods | Advantages | Disadvantages |
|---|---|---|---|
| Compensation device | Electric spring (ES) [18,19] | 1. Improve the stability of the system 2. Control of unbalanced voltage and power losses | Influenced by battery capacity and power of the non-critical load |
| Switching device | Serial automatic commutation switch [20] | 1. Regulate the unbalanced voltage and current 2. Suppress the unbalanced loads, voltages, currents and power losses considerably | 1. Additional switches are required, which will increase the cost 2. Each node needs to be collected and the complexity is increased |
| Parallel automatic commutation switch [21] | |||
| Interconnection device | VSC [22] | 1. Assess the power conversion efficiency 2. Regulation of the unbalanced currents and flexible control of DC PFC | 1. Higher complexity and higher cost 2. Cannot regulate the unbalanced voltage of the end nodes adequately |
| Power flow controller [23] |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| uref/V | 30 | kP | 0.03 |
| RL/Ω | 0.01 | kI | 3 |
| Rdp = Rd | 0.02 | L/mH | 5 |
| Rdn = Rd | 0.02 | C/mF | 1.8 |
| Load (Ω) | Node 1 | Node 2 | Node 3 | Node 4 |
|---|---|---|---|---|
| Rp | 1 | 5 | 10 | 5 |
| Rn | 5 | 8 | 5 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, C.; Wang, Y.; Liao, J. Coordinated Control of Voltage Balancers for the Regulation of Unbalanced Voltage in a Multi-Node Bipolar DC Distribution Network. Electronics 2022, 11, 166. https://doi.org/10.3390/electronics11010166
Guo C, Wang Y, Liao J. Coordinated Control of Voltage Balancers for the Regulation of Unbalanced Voltage in a Multi-Node Bipolar DC Distribution Network. Electronics. 2022; 11(1):166. https://doi.org/10.3390/electronics11010166
Chicago/Turabian StyleGuo, Chunsheng, Yuhong Wang, and Jianquan Liao. 2022. "Coordinated Control of Voltage Balancers for the Regulation of Unbalanced Voltage in a Multi-Node Bipolar DC Distribution Network" Electronics 11, no. 1: 166. https://doi.org/10.3390/electronics11010166
APA StyleGuo, C., Wang, Y., & Liao, J. (2022). Coordinated Control of Voltage Balancers for the Regulation of Unbalanced Voltage in a Multi-Node Bipolar DC Distribution Network. Electronics, 11(1), 166. https://doi.org/10.3390/electronics11010166