
The Design of Preventive Automated Driving Systems Based on Convolutional Neural Network




Abstract
:1. Introduction
- It contributes to the prevention of accidents by designing preventive automated driving systems through improving the camera’s recognition technique to be suitable for commercialization in terms of cost and recognition distance compared to LiDAR.
- It applies a better model for automated driving systems through performance comparisons of CNN methods that have recently made significant advances in object detection.
- Because it is difficult to obtain driving data, black box videos with the most similar collection location to those of automated vehicles and relatively easy to collect data were collected and learned.
- It can be used as basic materials in calculating the appropriate safety distance between vehicles in the future by estimating the distance according to the coordinates.
2. Related Works
3. Methodology
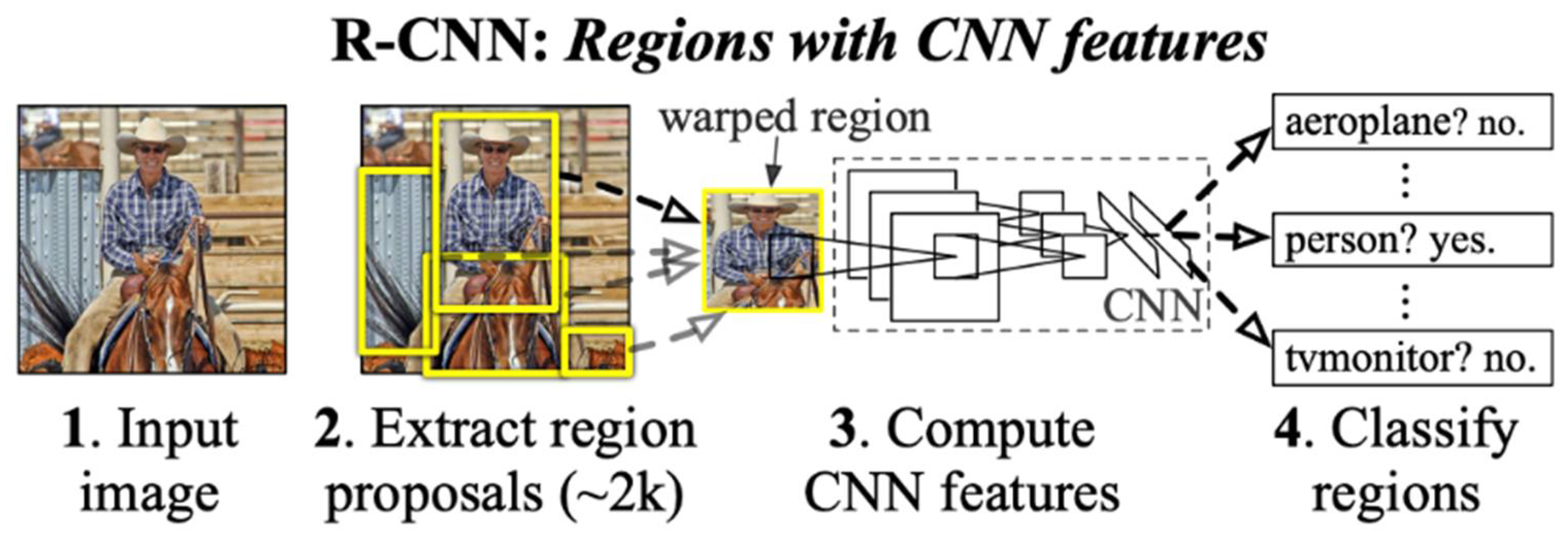
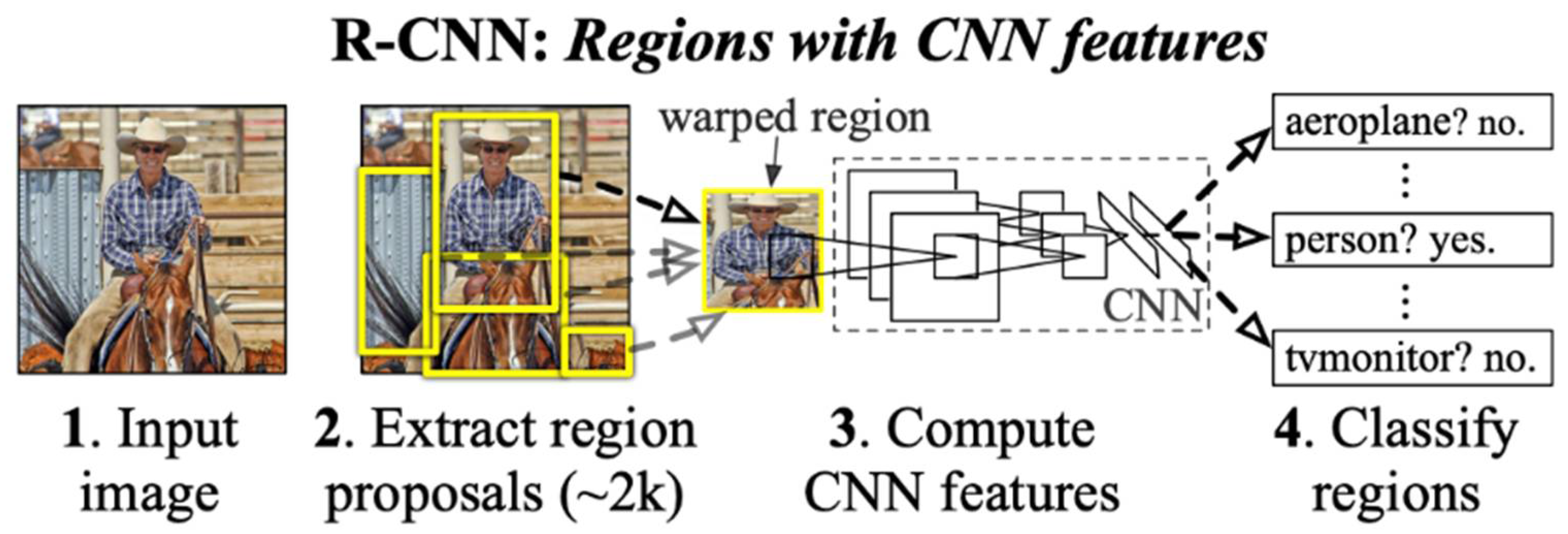
3.1. R-CNN
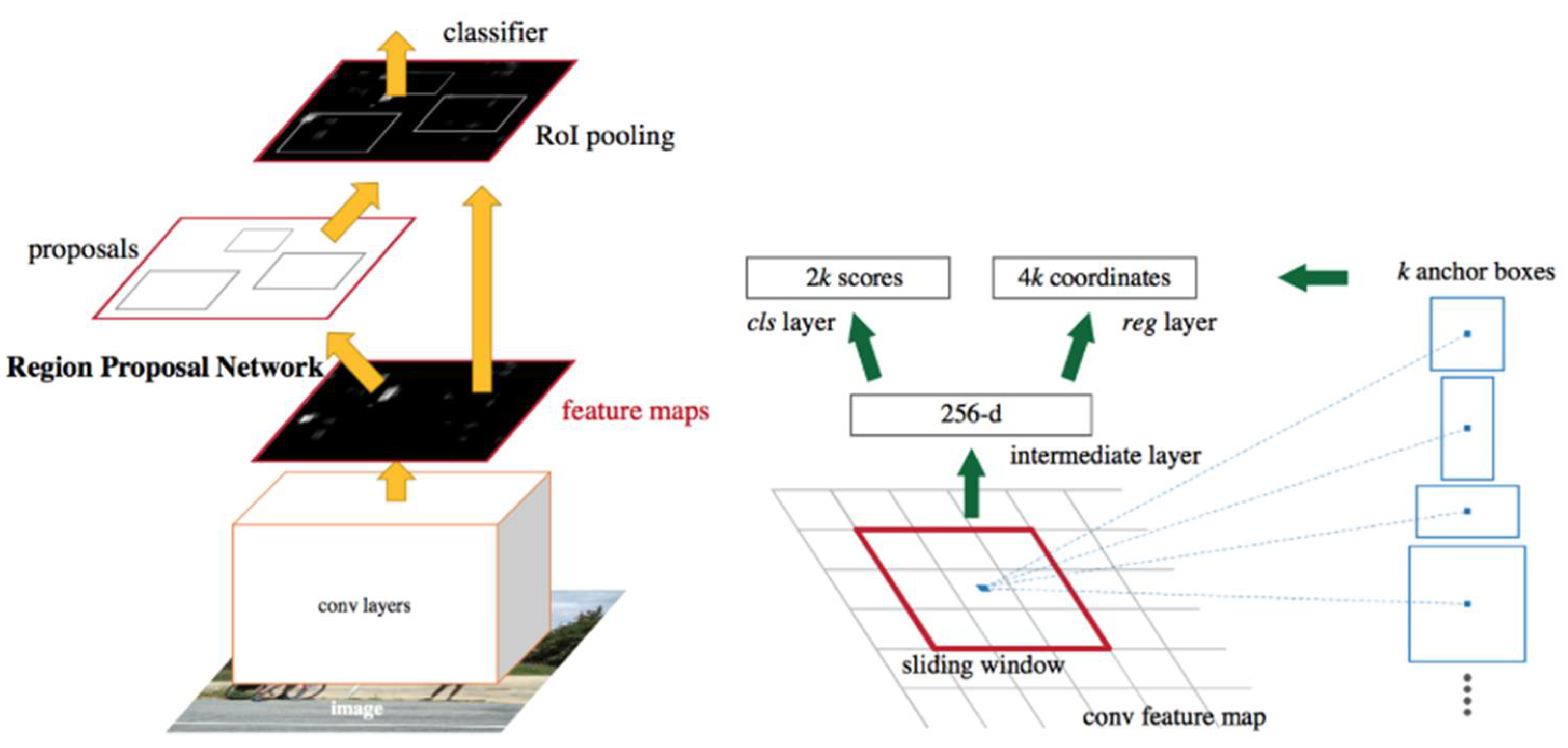
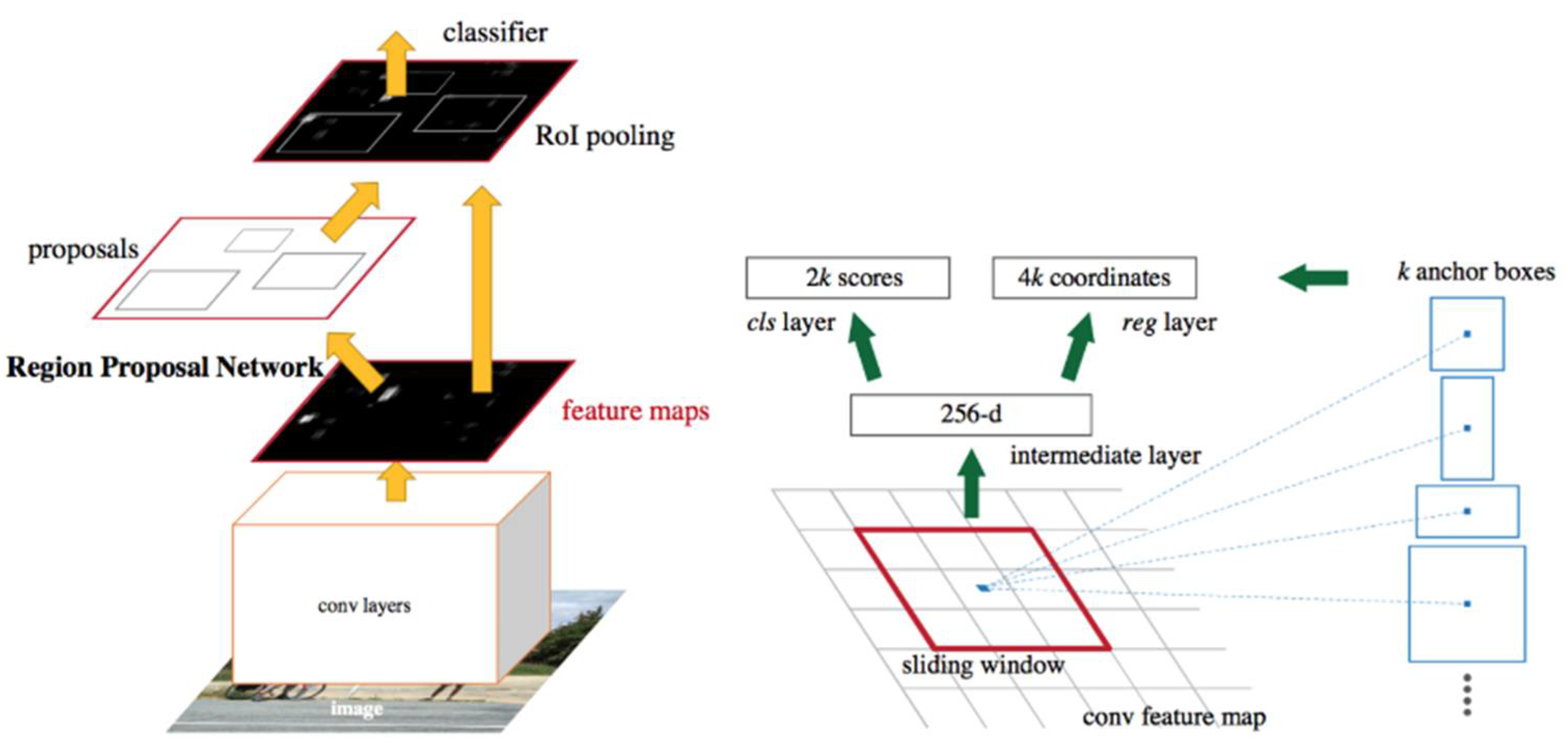
3.2. Faster R-CNN
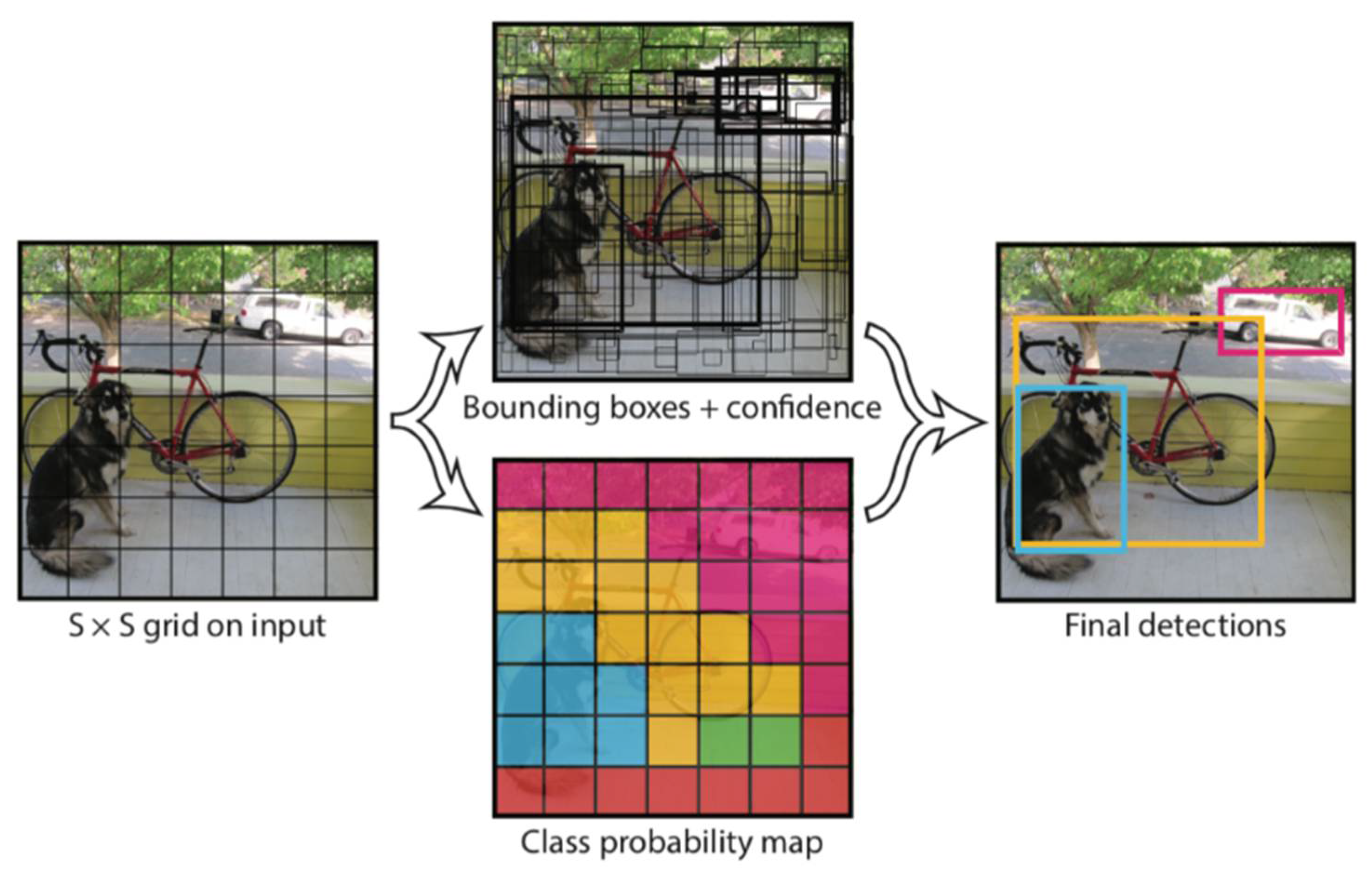
3.3. YOLO
4. Vehicle Detection and Distance Estimation
4.1. Data Collecting and Pre-Training
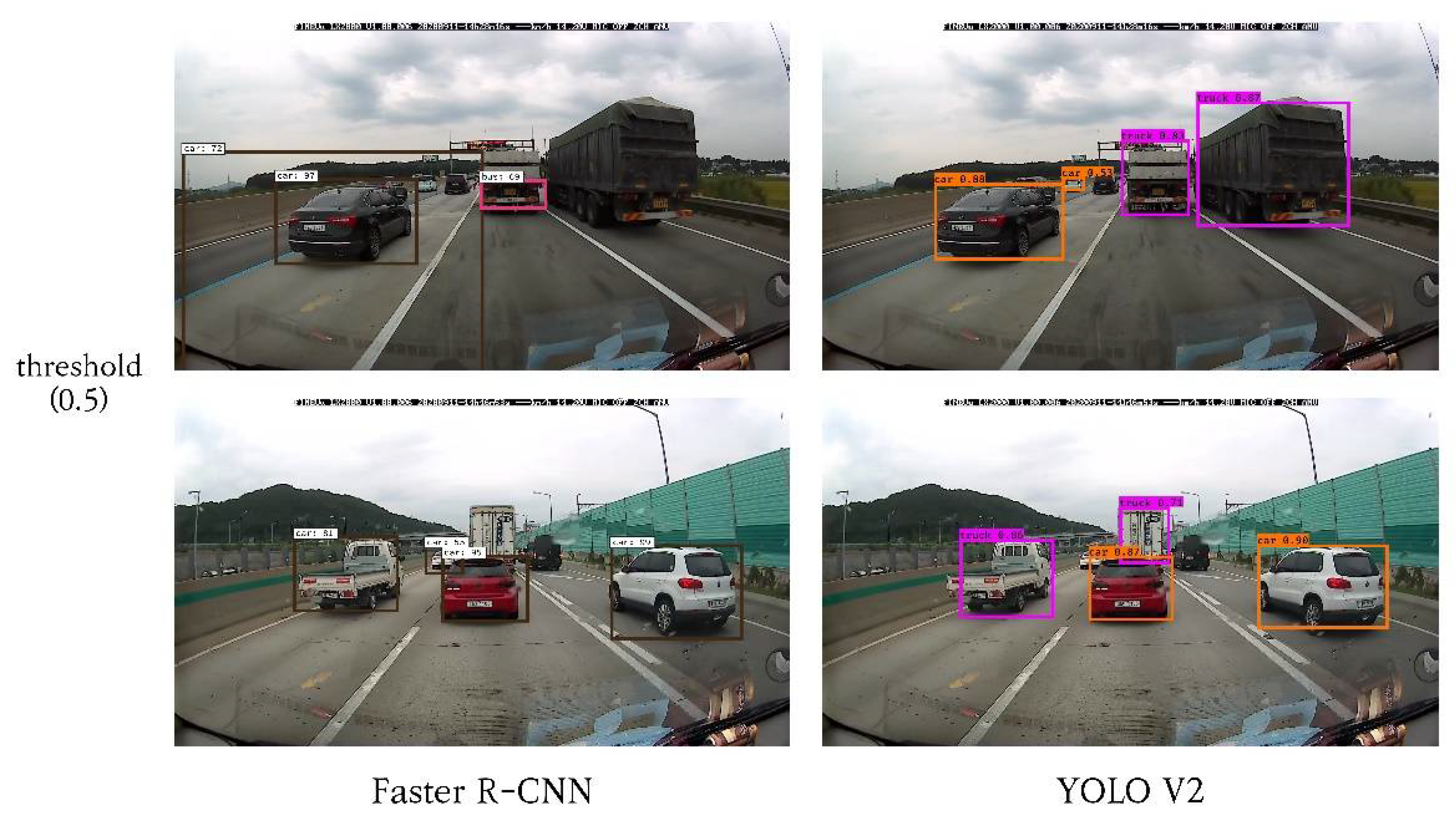
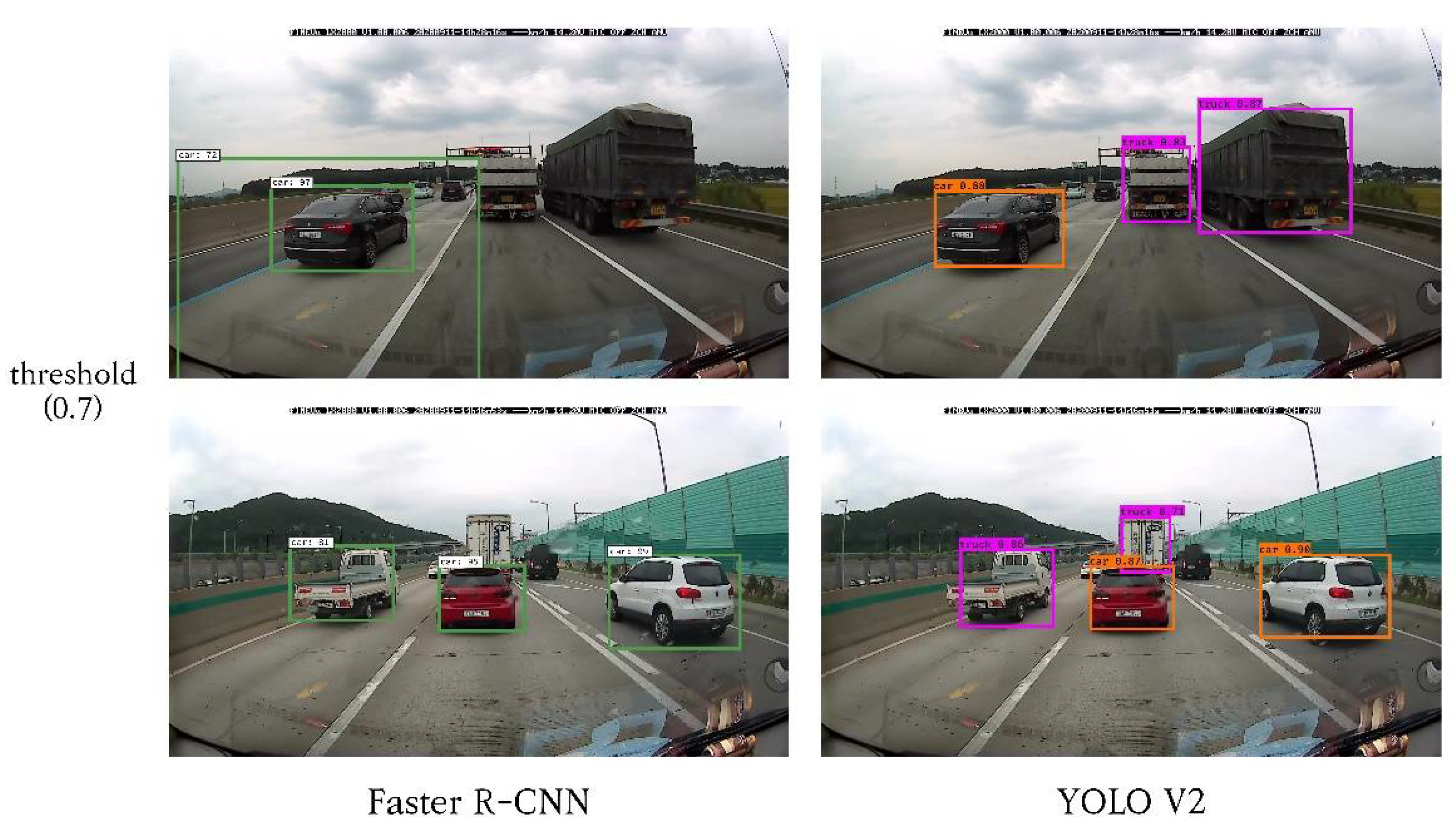
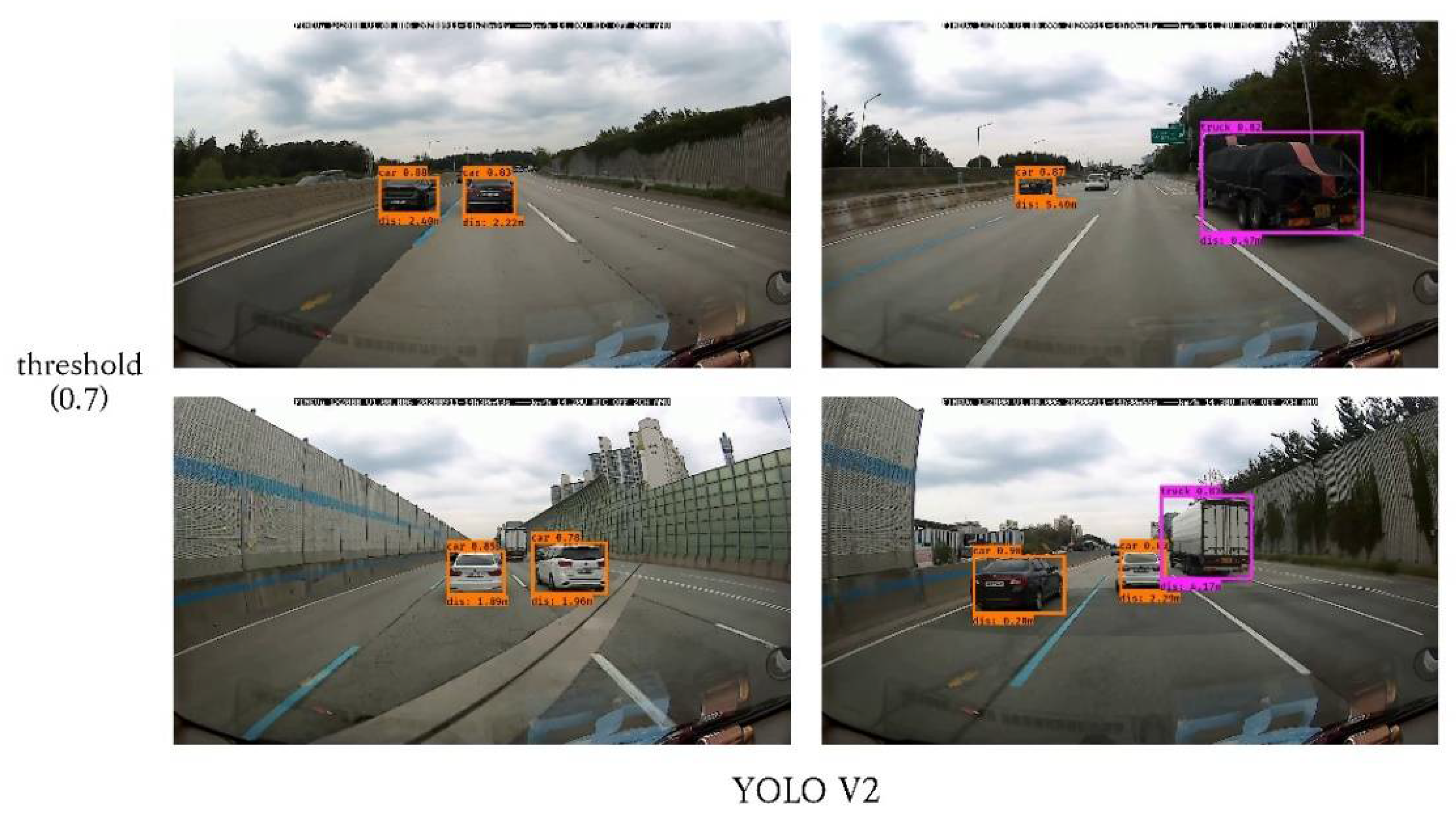
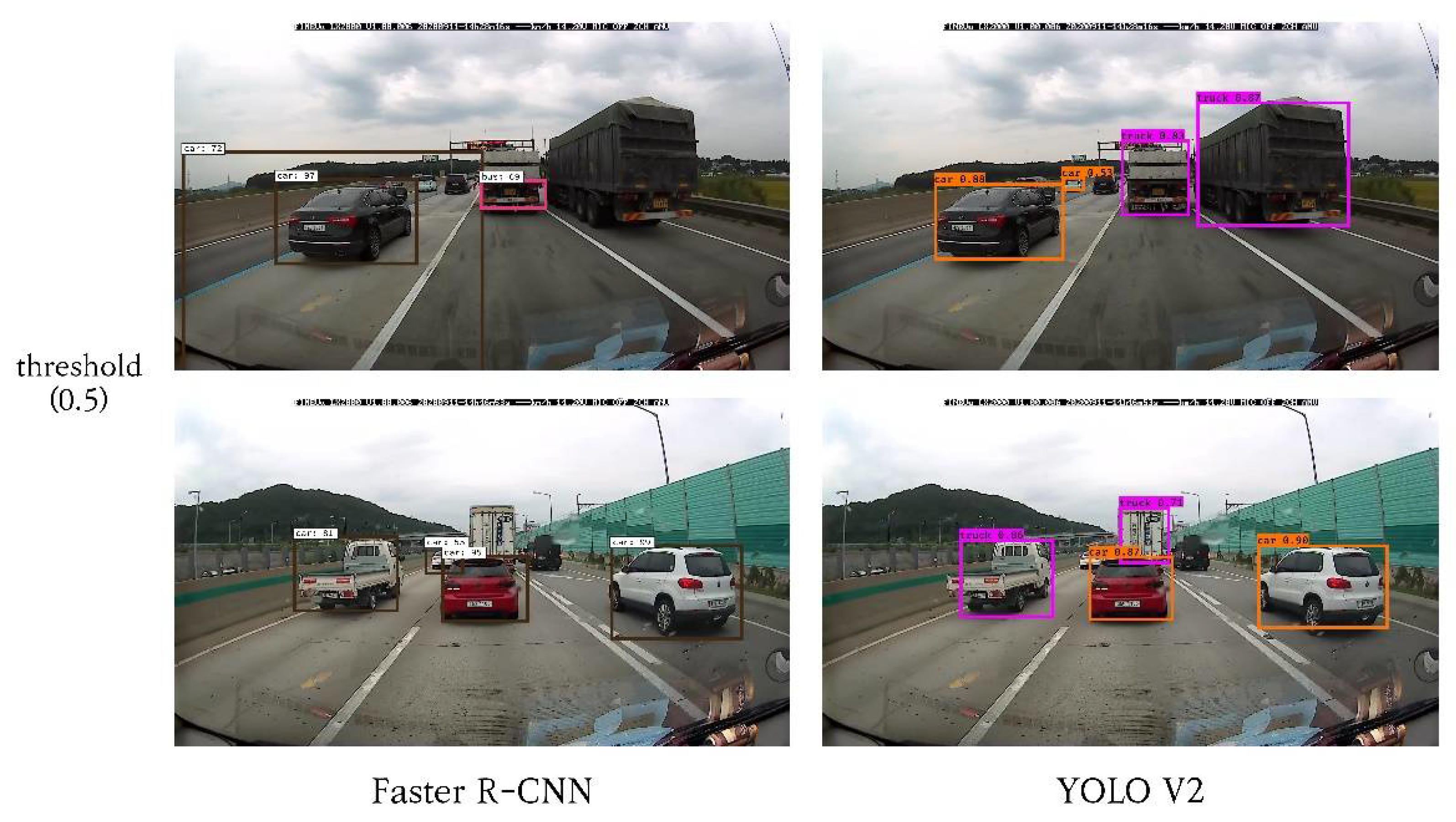
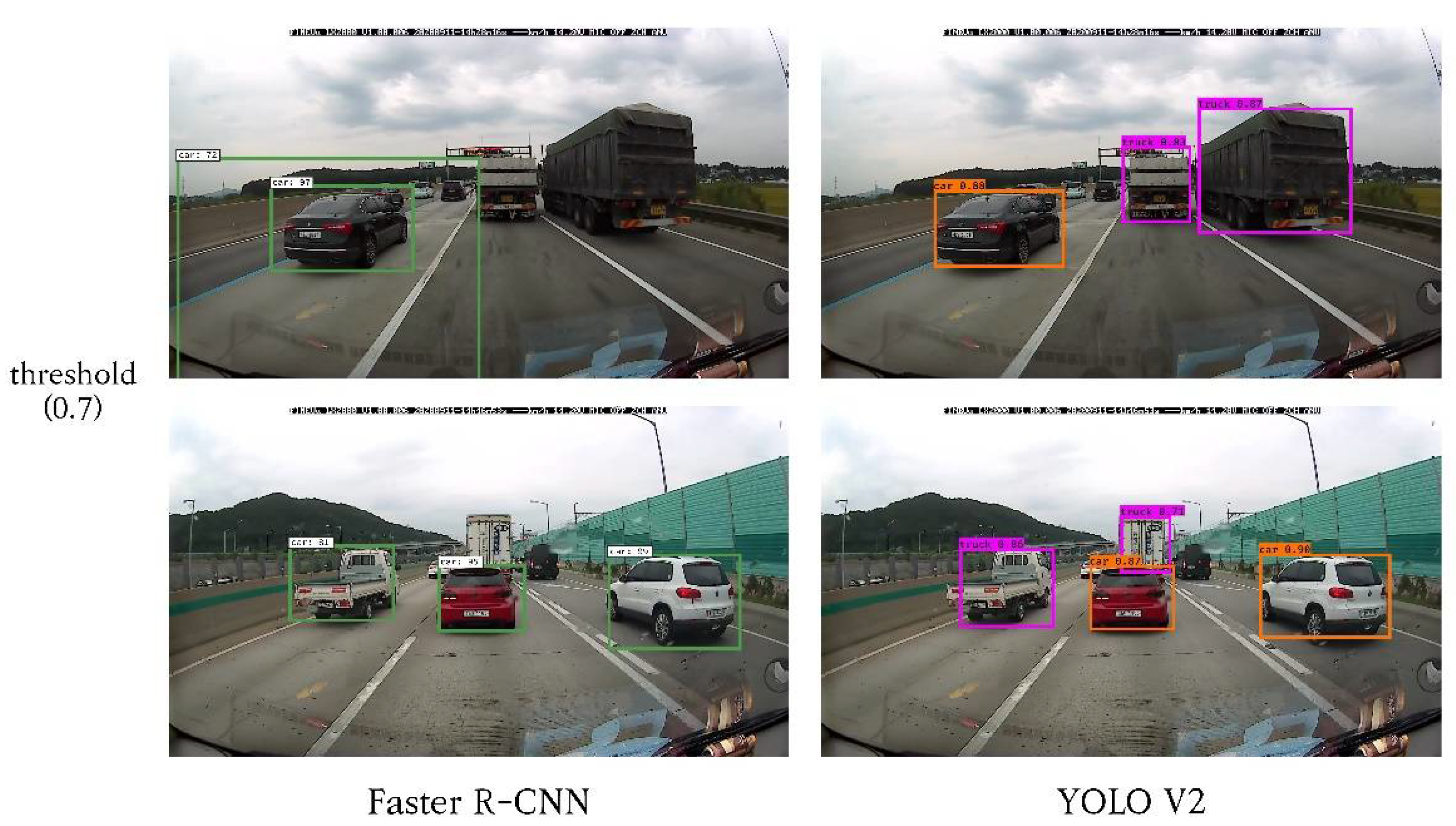
4.2. Vehicle Detection and Classification
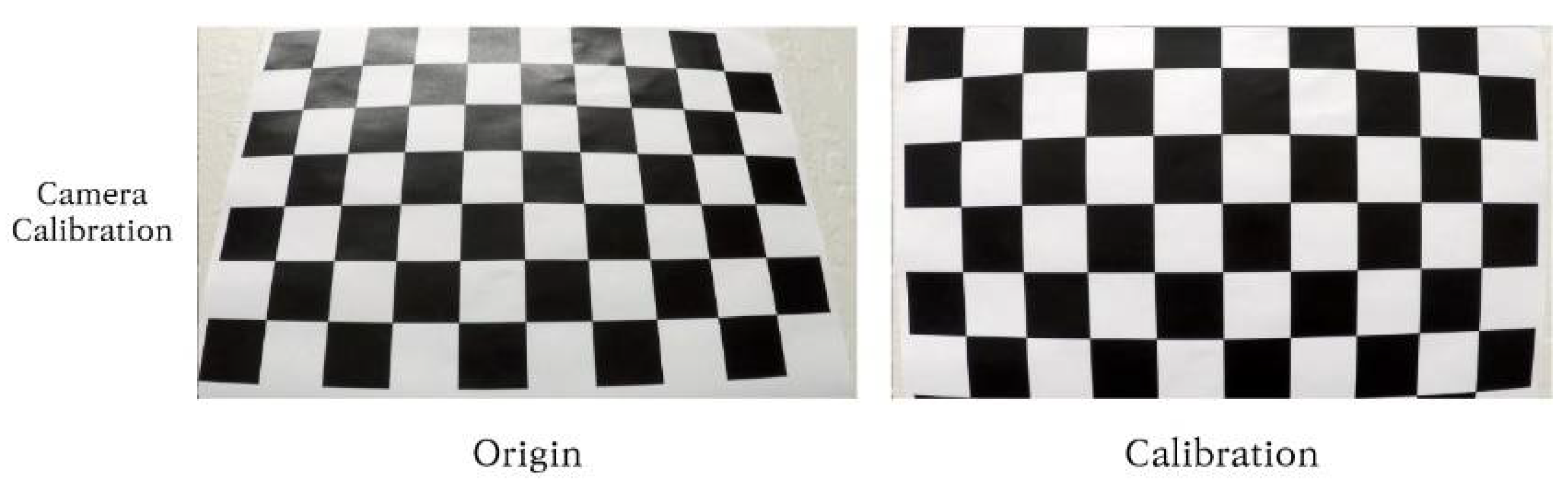
4.3. Distance Estimation
- (i)
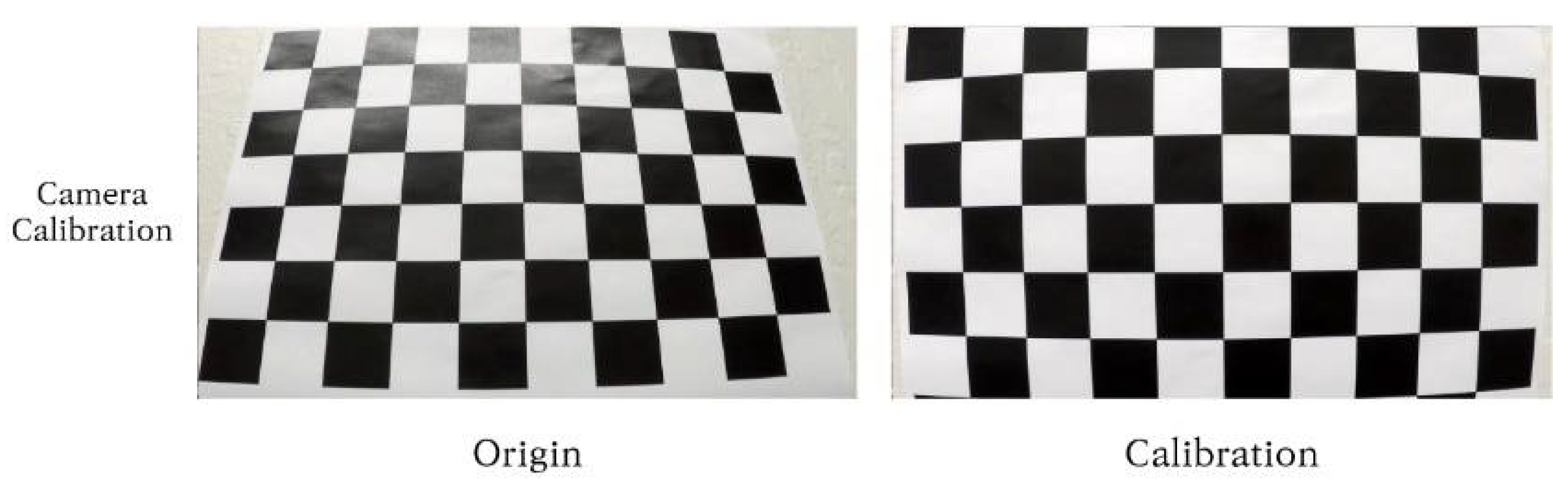
- After extracting the bounding box coordinates of the detected object, calculate the parameters using camera calibration.
- (ii)
- Reshape the coordinate value to (1, 1, 2) for matrix operation, transform the coordinate value back to 3D through perspective transform, and then reshape it to (2,1).
- (iii)
- Estimate and output the distance between the detected object and the camera through image warping and pixels per meter.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Masmoudi, M.; Ghazzai, H.; Frikha, M.; Massoud, Y. Object detection learning techniques for autonomous vehicle applications. In Proceedings of the 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 4–6 September 2019; pp. 1–5. [Google Scholar]
- Luettel, T.; Himmelsbach, M.; Wuensche, H.J. Autonomous ground vehicles—Concepts and a path to the future. Proc. IEEE 2012, 100, 1831–1839. [Google Scholar] [CrossRef]
- Abuelsamid, S.; Alexander, D.; Jerram, L. Navigant Research Leaderboard Report: Automated Driving; Navigant Consulting, Inc.: Boulder, CO, USA, 2017. [Google Scholar]
- Lee, B.Y. Domestic and foreign autonomous vehicle technology development trends and prospects. Information and Communications Magazine, 31 March 2016; Volume 33, 10–16. [Google Scholar]
- Kaan, J. User Acceptance of Autonomous Vehicles: Factors & Implications. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 28 August 2017. [Google Scholar]
- Kim, K.; Kim, B.; Lee, K.; Ko, B.; Yi, K. Design of integrated risk management-based dynamic driving control of automated vehicles. IEEE Intell. Transp. Syst. Mag. 2017, 9, 57–73. [Google Scholar] [CrossRef]
- Arnold, E.; Al-Jarrah, O.Y.; Dianati, M.; Fallah, S.; Oxtoby, D.; Mouzakitis, A. A survey on 3d object detection methods for autonomous driving applications. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3782–3795. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.Y.; Chung, J.H.; Son, B.S. Analysis of traffic accident severity for Korean highway using structural equations model. J. Korean Soc. Transp. 2008, 26, 17–24. [Google Scholar]
- Chen, Y.-L.; Wang, C.-A. Vehicle safety distance warning system: A novel algorithm for vehicle safety distance calculating between moving cars. In Proceedings of the 2007 IEEE 65th Vehicular Technology Conference-VTC2007-Spring, Dublin, Ireland, 22–25 April 2007; pp. 2570–2574. [Google Scholar]
- Zaarane, A.; Slimani, I.; Al Okaishi, W.; Atouf, I.; Hamdoun, A. Distance measurement system for autonomous vehicles using stereo camera. Array 2020, 5, 100016. [Google Scholar] [CrossRef]
- Li, P.; Chen, X.; Shen, S. Stereo r-cnn based 3d object detection for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 7644–7652. [Google Scholar]
- Chen, X.; Kundu, K.; Zhang, Z.; Ma, H.; Fidler, S.; Urtasun, R. Monocular 3d object detection for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2147–2156. [Google Scholar]
- LeCun, Y.; Bengio, Y. Convolutional networks for images, speech, and time series. Handb. Brain Theory Neural Netw. 1995, 3361, 1995. [Google Scholar]
- Tarmizi, I.A.; Abd Aziz, A. Vehicle Detection Using Convolutional Neural Network for Autonomous Vehicles. In Proceedings of the 2018 International Conference on Intelligent and Advanced System (ICIAS), Kuala Lumpur, Malaysia, 13–14 August 2018; pp. 1–5. [Google Scholar]
- Babiker, M.A.; Elawad, M.A.; Ahmed, A.H. Convolutional Neural Network for a Self-Driving Car in a Virtual Environment. In Proceedings of the 2019 International Conference on Computer, Control, Electrical, and Electronics Engineering (ICCCEEE), Khartoum, Sudan, 21–23 September 2019; pp. 1–6. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. arXiv 2015, arXiv:1506.01497. Available online: https://arxiv.org/abs/1506.01497 (accessed on 4 June 2015). [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. Available online: https://arxiv.org/abs/2004.10934 (accessed on 23 April 2020). [CrossRef] [Green Version]
- Bhaskar, H.; Dwivedi, K.; Dogra, D.P.; Al-Mualla, M.; Mihaylova, L. Autonomous detection and tracking under illumination changes, occlusions and moving camera. Signal Process. 2015, 117, 343–354. [Google Scholar] [CrossRef] [Green Version]
- Kehtarnavaz, N.; Griswold, N.C.; Eem, J.K. Comparison of mono-and stereo-camera systems for autonomous vehicle tracking. In Proceedings of the Applications of Artificial Intelligence IX, Orlando, FL, USA, 1 March 1991; Volume 1468, pp. 467–478. [Google Scholar]
- Grimes, D.M.; Jones, T.O. Automotive radar: A brief review. Proc. IEEE 1974, 62, 804–822. [Google Scholar] [CrossRef]
- Nabati, R.; Qi, H. Rrpn: Radar region proposal network for object detection in autonomous vehicles. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 3093–3097. [Google Scholar]
- Kocić, J.; Jovičić, N.; Drndarević, V. Sensors and sensor fusion in autonomous vehicles. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; pp. 420–425. [Google Scholar]
- Zhao, X.; Sun, P.; Xu, Z.; Min, H.; Yu, H. Fusion of 3D LIDAR and camera data for object detection in autonomous vehicle applications. IEEE Sens. J. 2020, 20, 4901–4913. [Google Scholar] [CrossRef] [Green Version]
- Rashed, H.; Ramzy, M.; Vaquero, V.; El Sallab, A.; Sistu, G.; Yogamani, S. Fusemodnet: Real-time camera and lidar based moving object detection for robust low-light autonomous driving. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Lai, Y.K.; Chou, Y.H.; Schumann, T. Vehicle detection for forward collision warning system based on a cascade classifier using adaboost algorithm. In Proceedings of the 2017 IEEE 7th International Conference on Consumer Electronics-Berlin (ICCE-Berlin), Berlin, Germany, 3–6 September 2017; pp. 47–48. [Google Scholar]
- Hu, J.; Sun, Y.; Xiong, S. Research on the Cascade Vehicle Detection Method Based on CNN. Electronics 2021, 10, 481. [Google Scholar] [CrossRef]
- Molina-Cabello, M.A.; Luque-Baena, R.M.; López-Rubio, E.; Thurnhofer-Hemsi, K. Vehicle type detection by convolutional neural networks. In Proceedings of the International Work-Conference on the Interplay Between Natural and Artificial Computation (IWINAC), Corunna, Spain, 19–23 June 2017; pp. 268–278. [Google Scholar]
- Gao, H.; Cheng, B.; Wang, J.; Li, K.; Zhao, J.; Li, D. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Trans. Ind. Inform. 2018, 14, 4224–4231. [Google Scholar] [CrossRef]
- Murali, A.; Nair, B.B.; Rao, S.N. Comparative Study of Different CNNs for Vehicle Classification. In Proceedings of the 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Madurai, India, 13–15 December 2018; pp. 1–4. [Google Scholar]
- Molina-Cabello, M.A.; Luque-Baena, R.M.; Lopez-Rubio, E.; Thurnhofer-Hemsi, K. Vehicle type detection by ensembles of convolutional neural networks operating on super resolved images. Integr. Comput. Aided Eng. 2018, 25, 321–333. [Google Scholar] [CrossRef]
- Joung, J.; Jung, S.; Chung, S.; Jeong, E.R. CNN-based Tx–Rx distance estimation for UWB system localisation. Electron. Lett. 2019, 55, 938–940. [Google Scholar] [CrossRef]
- Mukherjee, A.; Adarsh, S.; Ramachandran, K.I. ROS-Based Pedestrian Detection and Distance Estimation Algorithm Using Stereo Vision, Leddar and CNN. In Intelligent System Design; Springer: Singapore, 2020; pp. 117–127. [Google Scholar]
- Benjdira, B.; Khursheed, T.; Koubaa, A.; Ammar, A.; Ouni, K. Car detection using unmanned aerial vehicles: Comparison between faster r-cnn and yolov3. In Proceedings of the 2019 1st International Conference on Unmanned Vehicle Systems-Oman (UVS), Muscat, Oman, 5–7 February 2019; pp. 1–6. [Google Scholar]
- Ammar, A.; Koubaa, A.; Ahmed, M.; Saad, A. Aerial images processing for car detection using convolutional neural networks: Comparison between faster r-cnn and yolov3. arXiv 2019, arXiv:1910.07234. Available online: https://arxiv.org/abs/1910.07234 (accessed on 16 October 2019). [CrossRef] [Green Version]
- Maity, M.; Banerjee, S.; Chaudhuri, S.S. Faster R-CNN and YOLO based Vehicle detection: A Survey. In Proceedings of the 2021 5th International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 8–10 April 2021; pp. 1442–1447. [Google Scholar]
- Hsu, S.C.; Huang, C.L.; Chuang, C.H. Vehicle detection using simplified fast R-CNN. In Proceedings of the 2018 International Workshop on Advanced Image Technology (IWAIT), Chiang Mai, Thailand, 7–9 January 2018; pp. 1–3. [Google Scholar]
- Dai, X.; Hu, J.; Zhang, H.; Shitu, A.; Luo, C.; Osman, A.; Sfarra, S.; Duan, Y. Multi-task faster R-CNN for nighttime pedestrian detection and distance estimation. Infrared Phys. Technol. 2021, 115, 103694. [Google Scholar] [CrossRef]
- Avola, D.; Cinque, L.; Diko, A.; Fagioli, A.; Foresti, G.L.; Mecca, A.; Pannone, D.; Piciarelli, C. MS-Faster R-CNN: Multi-Stream Backbone for Improved Faster R-CNN Object Detection and Aerial Tracking from UAV Images. Remote Sens. 2021, 13, 1670. [Google Scholar] [CrossRef]
- Strbac, B.; Gostovic, M.; Lukac, Z.; Samardzija, D. YOLO Multi-Camera Object Detection and Distance Estimation. In Proceedings of the 2020 Zooming Innovation in Consumer Technologies Conference (ZINC), Novi Sad, Serbia, 26–27 May 2020; pp. 26–30. [Google Scholar]
- Rani, E.; Jamiya, S. LittleYOLO-SPP: A delicate real-time vehicle detection algorithm. Optik 2021, 225, 165818. [Google Scholar]
- Sanchez-Castro, J.J.; Rodríguez-Quiñonez, J.C.; Ramírez-Hernández, L.R.; Galaviz, G.; Hernández-Balbuena, D.; Trujillo-Hernández, G.; Flores-Fuentes, W.; Mercorelli, P.; Hernández-Perdomo, W.; Sergiyenko, O.; et al. A Lean Convolutional Neural Network for Vehicle Classification. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 1365–1369. [Google Scholar]
- Khan, M.A. HCRNNIDS: Hybrid Convolutional Recurrent Neural Network-Based Network Intrusion Detection System. Processes 2021, 9, 834. [Google Scholar] [CrossRef]
- O’Mahony, N.; Campbell, S.; Carvalho, A.; Harapanahalli, S.; Hernandez, G.V.; Krpalkova, L.; Riordan, D.; Walsh, J. Deep learning vs. traditional computer vision. In Proceedings of the Science and Information Conference, Las Vegas, NV, USA, 2–3 May 2019; pp. 128–144. [Google Scholar]
- Zhao, Z.; Zheng, P.; Xu, S.; Wu, X. Object Detection with Deep Learning: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Lu, Q.; Liu, C.; Jiang, Z.; Men, A.; Yang, B. G-CNN: Object detection via grid convolutional neural network. IEEE Access 2017, 5, 24023–24031. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Cmputer Vsion and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Schoepflin, T.N.; Dailey, D.J. Dynamic camera calibration of roadside traffic management cameras. In Proceedings of the IEEE 5th International Conference on Intelligent Transportation Systems, Singapore, 3–6 September 2002; pp. 25–30. [Google Scholar]
- Wolberg, G. Digital Image Warping; IEEE Computer Society Press: Los Alamitos, CA, USA, 1990. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Li, B.; Liu, Y.; Wang, X. Gradient harmonized single-stage detector. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 8577–8584. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Dataset | mAP | |
|---|---|---|---|
| 2-stage detector | R-CNN(VGG16) | VOC 2007 | 66 |
| SPP-Net(ZF) | VOC 2007 | 60.9 | |
| Faster R-CNN | VOC 2007 + VOC 2012 + MS COCO | 75.9 | |
| 1-stage detector | G-CNN | VOC 2007 | 79.4 |
| YOLO V2 | VOC 2007 + VOC 2012 + MS COCO | 78.2 | |
| SSD512 | VOC 2007 + VOC 2012 + MS COCO | 82.2 | |
| Layer Name | No. of Units | Output Size |
|---|---|---|
| Convolution 1 | [7 × 7, stride 2, channel 64] × 1 | 112 × 112 |
| Convolution 2 | [3 × 3 max pooling, stride 2] × 1 | 56 × 56 |
| [1 × 1, channel 64] × 3 | ||
| [3 × 3, channel 64] × 3 | ||
| [1 × 1, channel 256] × 3 | ||
| Convolution 3 | [1 × 1, channel 128] × 4 | 28 × 28 |
| [3 × 3, channel 128] × 4 | ||
| [1 × 1, channel 512] × 4 | ||
| Convolution 4 | [1 × 1, channel 256] × 23 | 14 × 14 |
| [3 × 3, channel 256] × 23 | ||
| [1 × 1, channel 1024] × 23 | ||
| Convolution 5 | [1 × 1, channel 512] × 3 | 7 × 7 |
| [3 × 3, channel 512] × 3 | ||
| [1 × 1, channel 2048] × 3 | ||
| Output | Average pooling, 1000d-fc, softmax | 1 × 1 |
| Layer Type | Filters | Size/Stride | Output Size |
|---|---|---|---|
| Convolutional | 32 | 3 × 3 | 224 × 224 |
| Maxpool | 2 × 2/2 | 112 × 112 | |
| Convolutional | 64 | 3 × 3 | |
| Maxpool | 2 × 2/2 | 56 × 56 | |
| Convolutional | 128 | 3 × 3 | |
| Convolutional | 64 | 1 × 1 | |
| Convolutional | 128 | 3 × 3 | |
| Maxpool | 2 × 2/2 | 28 × 28 | |
| Convolutional | 256 | 3 × 3 | |
| Convolutional | 128 | 1 × 1 | |
| Convolutional | 256 | 3 × 3 | |
| Maxpool | 2 × 2/2 | 14 × 14 | |
| Convolutional | 512 | 3 × 3 | |
| Convolutional | 256 | 1 × 1 | |
| Convolutional | 512 | 3 × 3 | |
| Convolutional | 256 | 1 × 1 | |
| Convolutional | 512 | 3 × 3 | |
| Maxpool | 2 × 2/2 | 7 × 7 | |
| Convolutional | 1024 | 3 × 3 | |
| Convolutional | 512 | 1 × 1 | |
| Convolutional | 1024 | 3 × 3 | |
| Convolutional | 512 | 1 × 1 | |
| Convolutional | 1024 | 3 × 3 | |
| Convolutional | 1000 | 1 × 1 | 7 × 7 |
| Avgpool | Global | 1000 | |
| Softmax |
| Performance | |
|---|---|
| Hardware |
|
| Software |
|
| Model |
|
| Model | Backbone | Dataset | mAP | FPS |
|---|---|---|---|---|
| Faster R-CNN | ResNet-101 | Pascal VOC 2007 | 76.4 | 5 |
| YOLO V2 | DarkNet-19 | 78.6 | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, W.; Kang, M.-H.; Song, J.; Hwang, K. The Design of Preventive Automated Driving Systems Based on Convolutional Neural Network. Electronics 2021, 10, 1737. https://doi.org/10.3390/electronics10141737
Lee W, Kang M-H, Song J, Hwang K. The Design of Preventive Automated Driving Systems Based on Convolutional Neural Network. Electronics. 2021; 10(14):1737. https://doi.org/10.3390/electronics10141737
Chicago/Turabian StyleLee, Wooseop, Min-Hee Kang, Jaein Song, and Keeyeon Hwang. 2021. "The Design of Preventive Automated Driving Systems Based on Convolutional Neural Network" Electronics 10, no. 14: 1737. https://doi.org/10.3390/electronics10141737
APA StyleLee, W., Kang, M.-H., Song, J., & Hwang, K. (2021). The Design of Preventive Automated Driving Systems Based on Convolutional Neural Network. Electronics, 10(14), 1737. https://doi.org/10.3390/electronics10141737