Minimization of MEDA Biochip-Size in Droplet Routing




Abstract
:1. Introduction and Related Work
1.1. Introduction
1.2. Related Work
2. Droplet Routing for Minimization of MEDA Biochip-Size
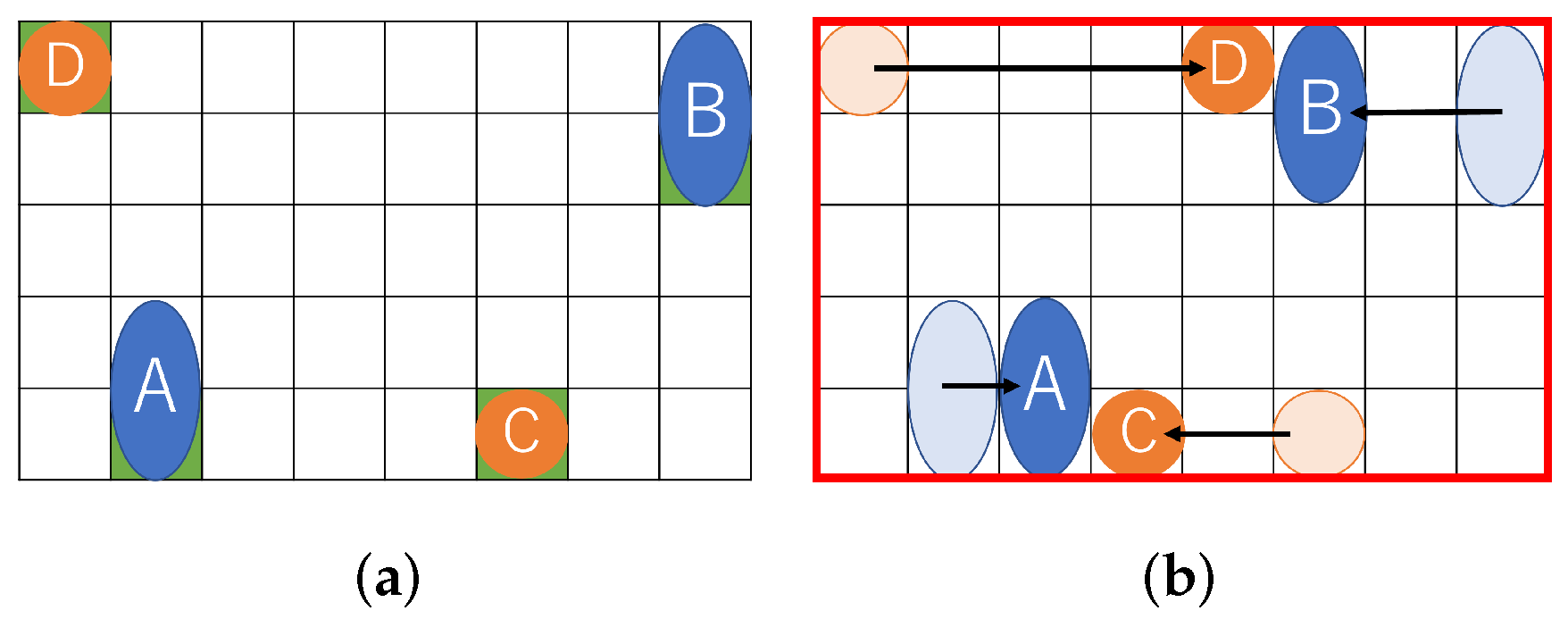
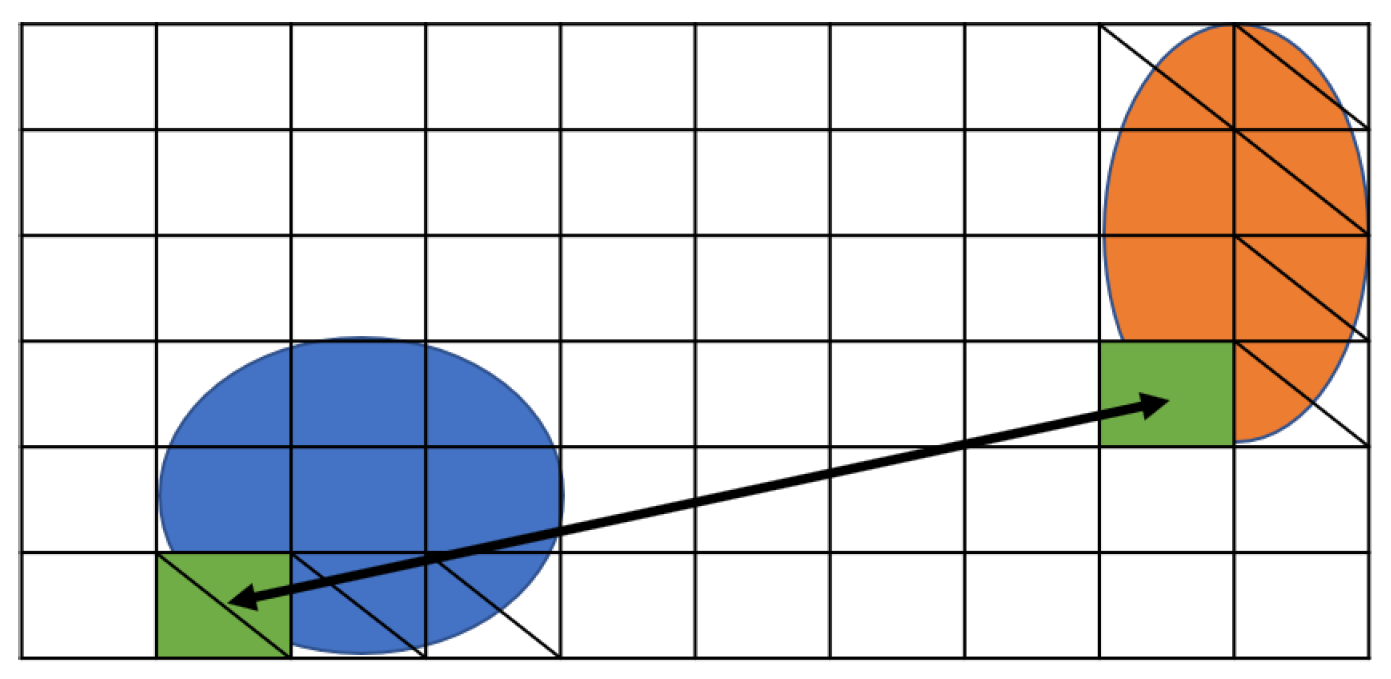
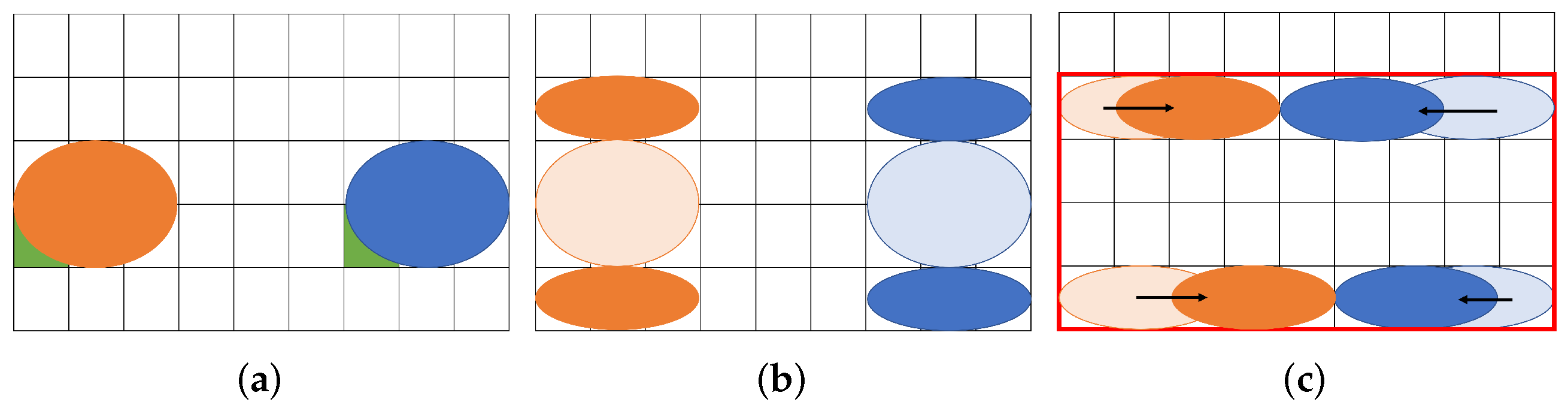
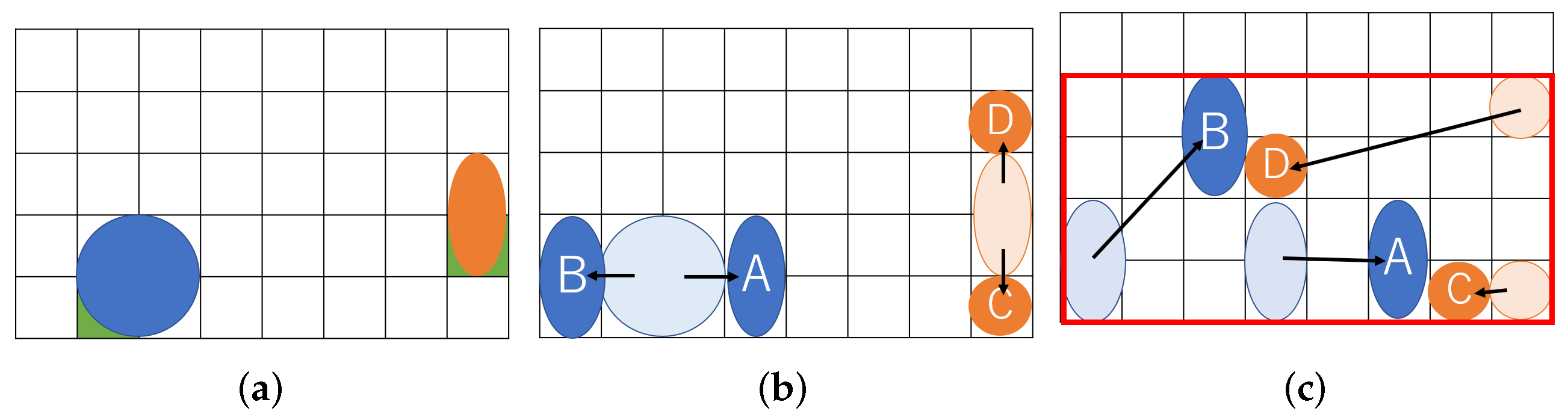
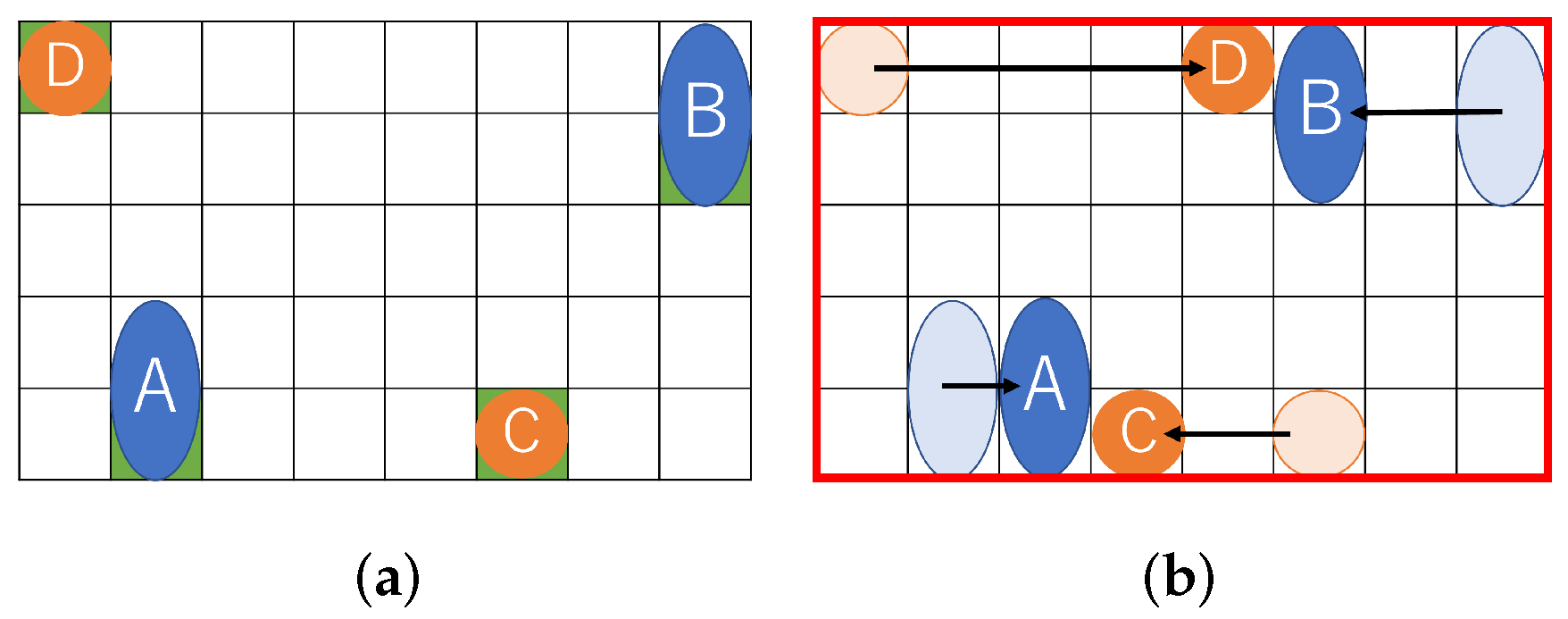
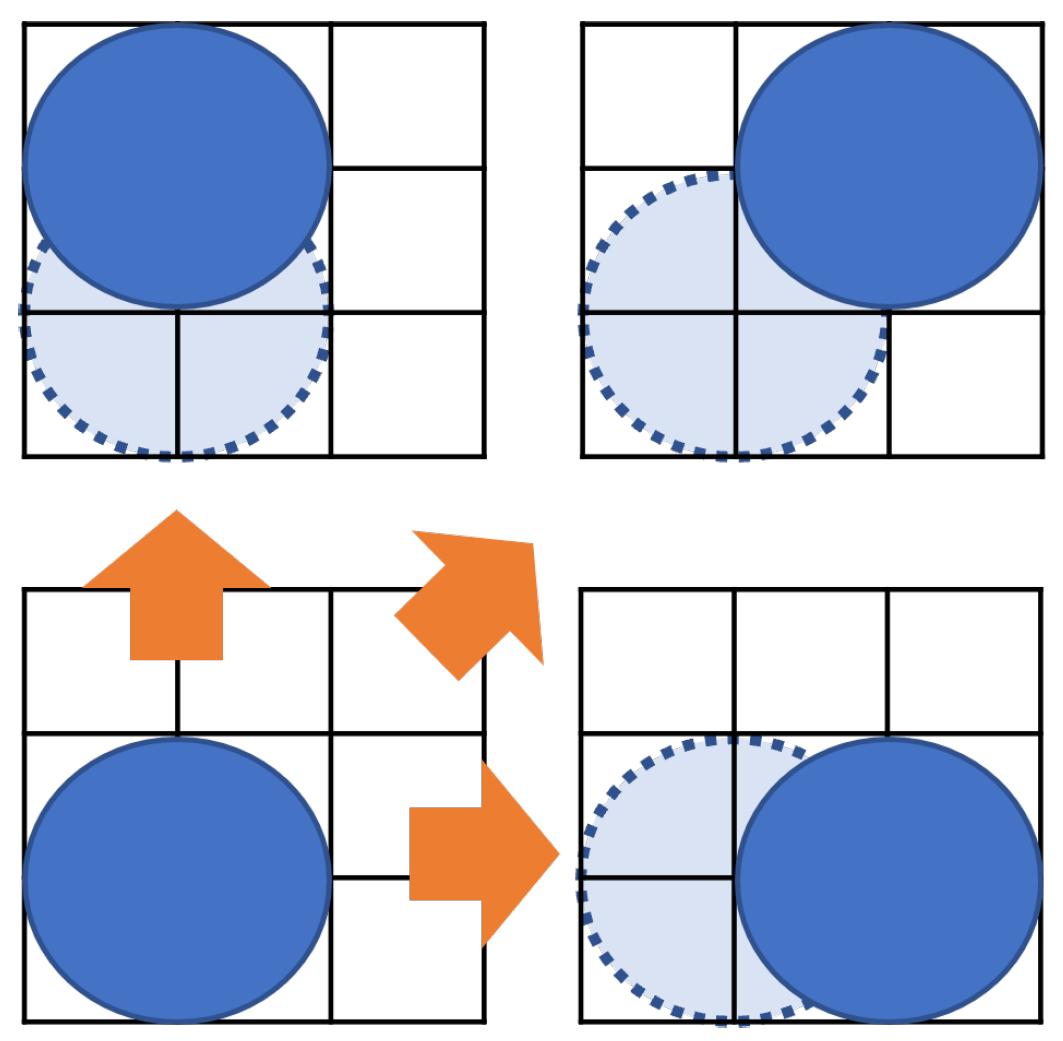
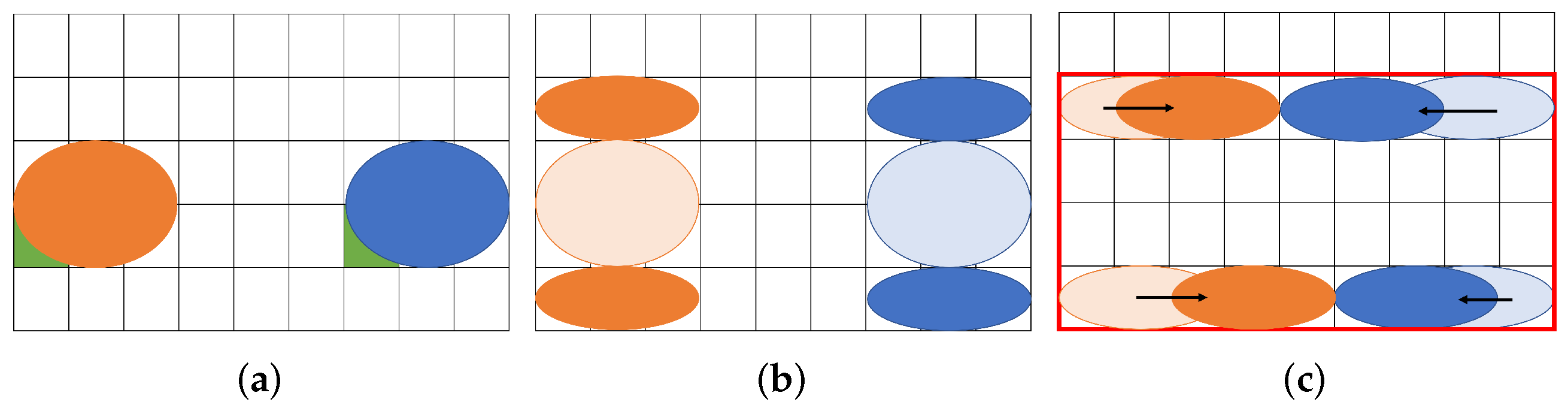
2.1. Problem Definition and Example
2.2. Formulation
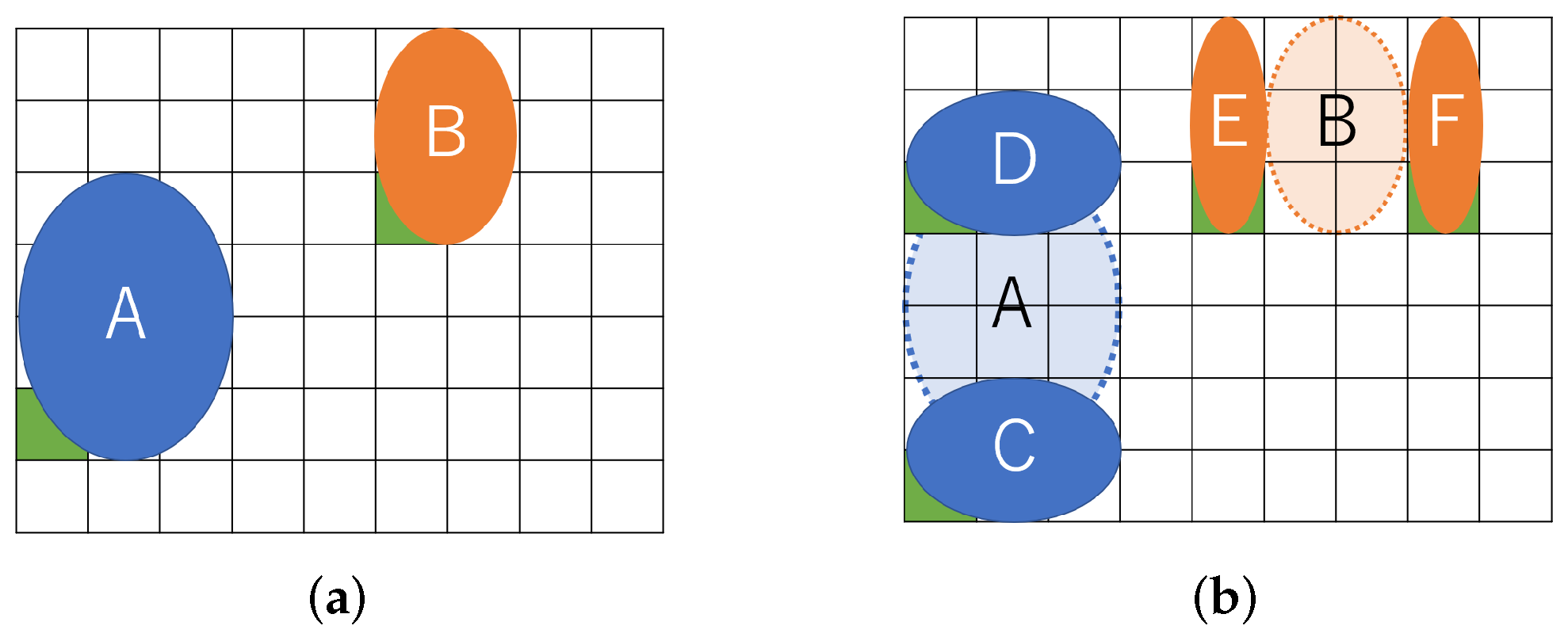
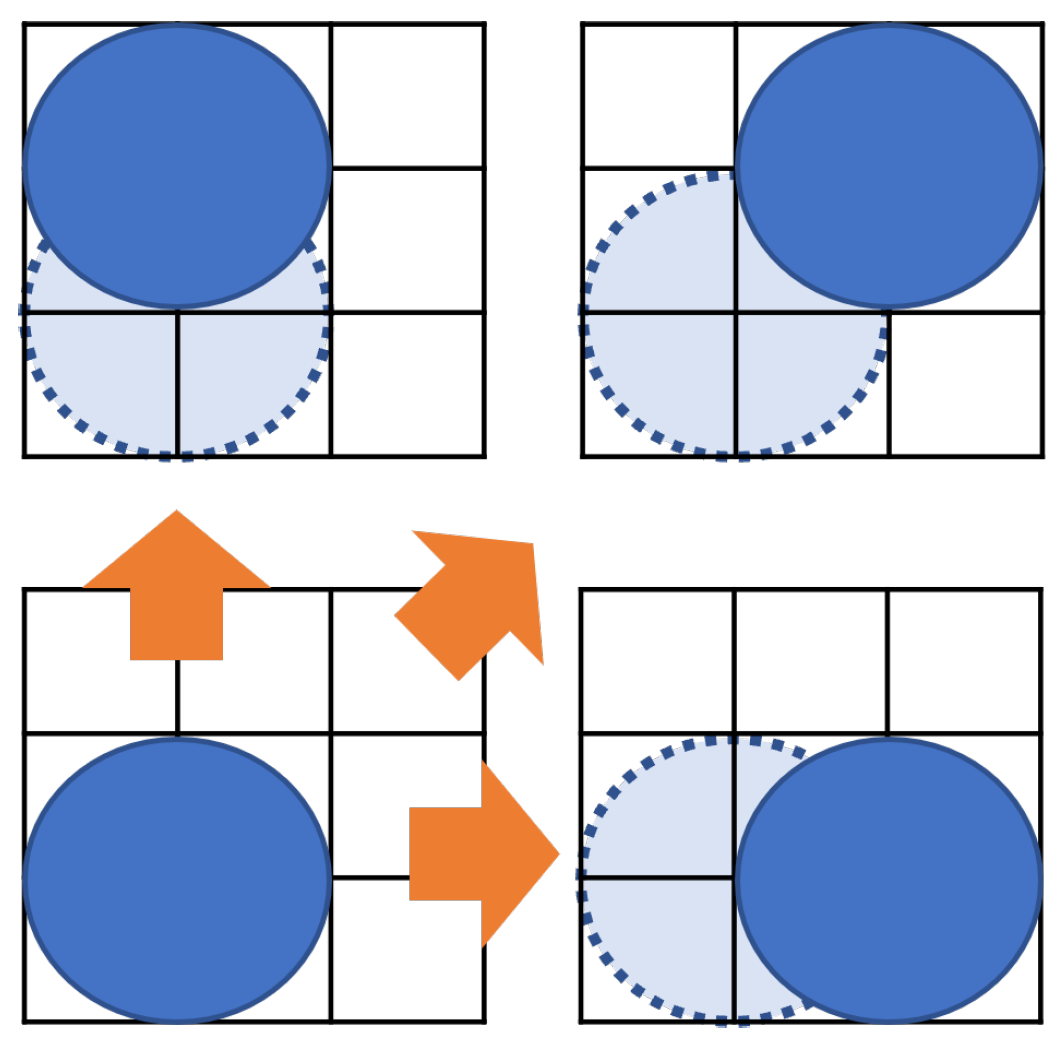
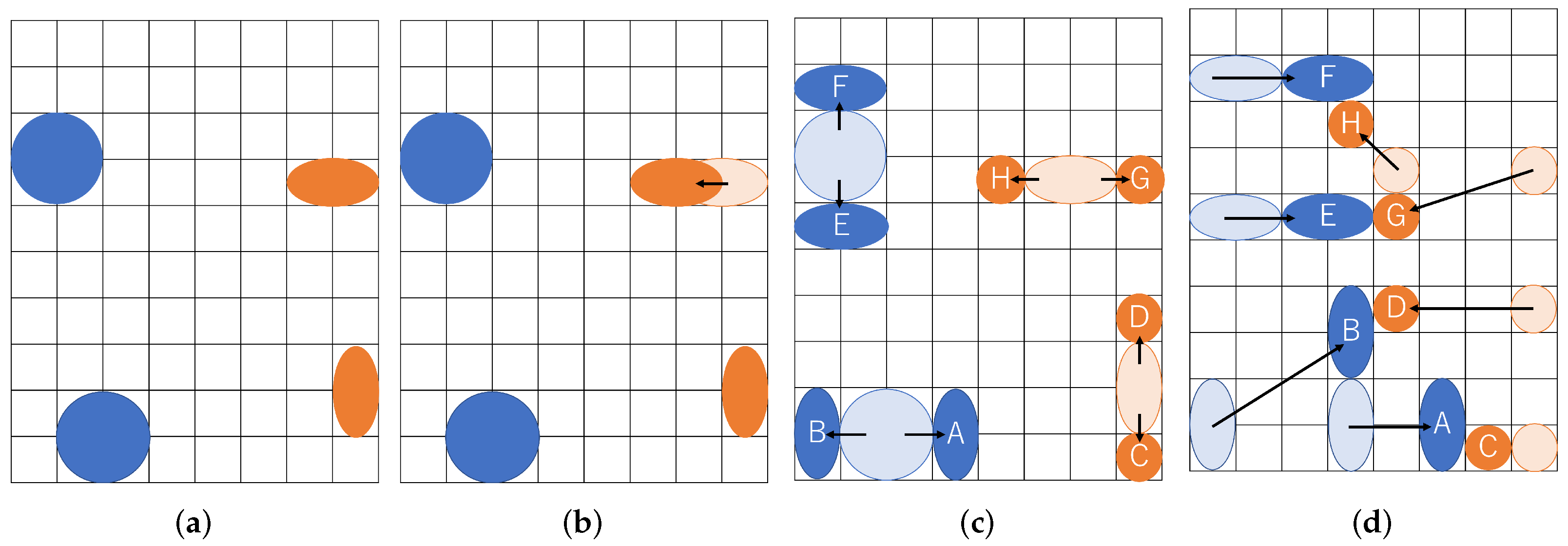
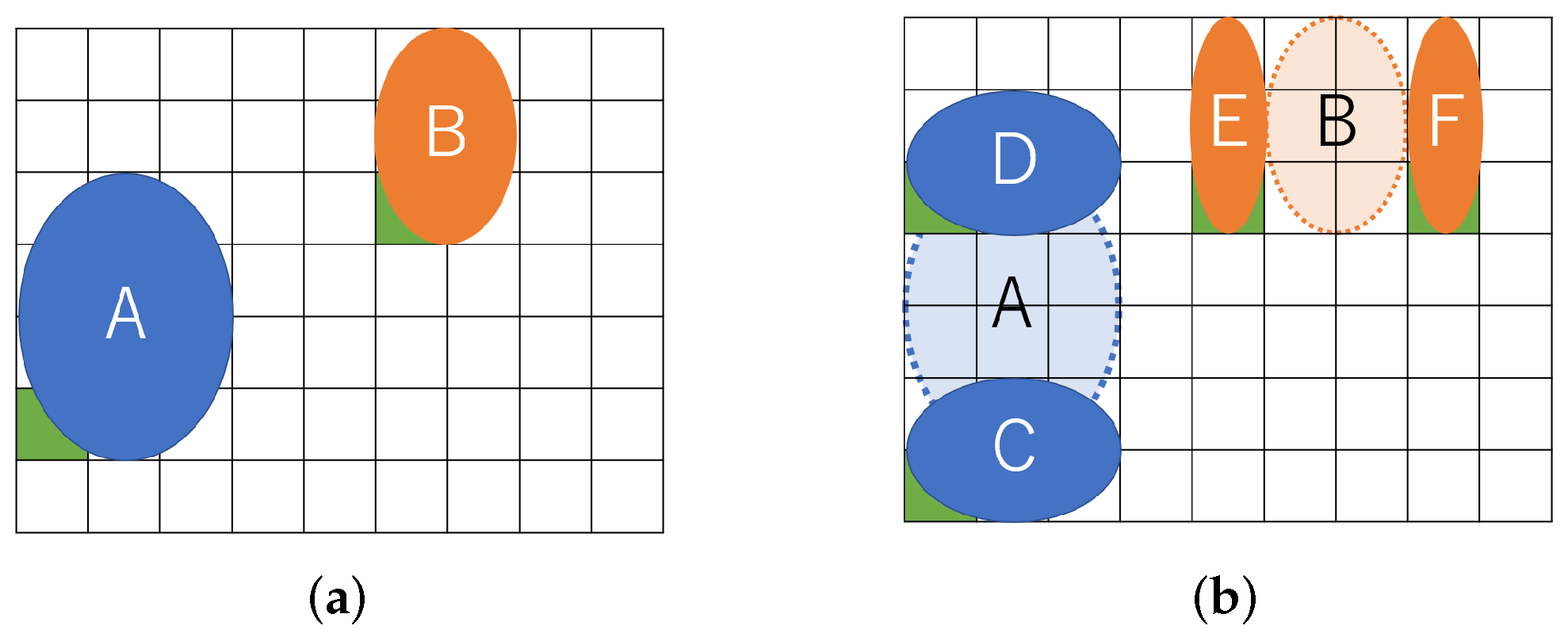
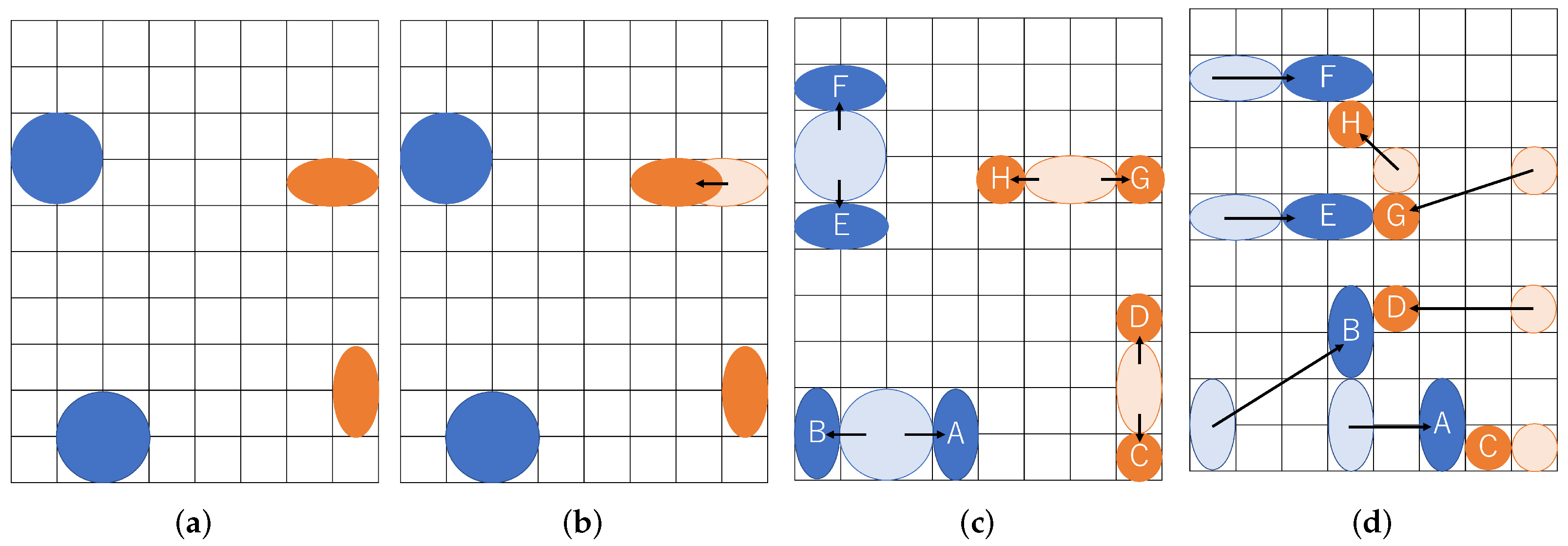
2.3. Multiple Couples of Droplets Routing
3. Experiments
3.1. Setup
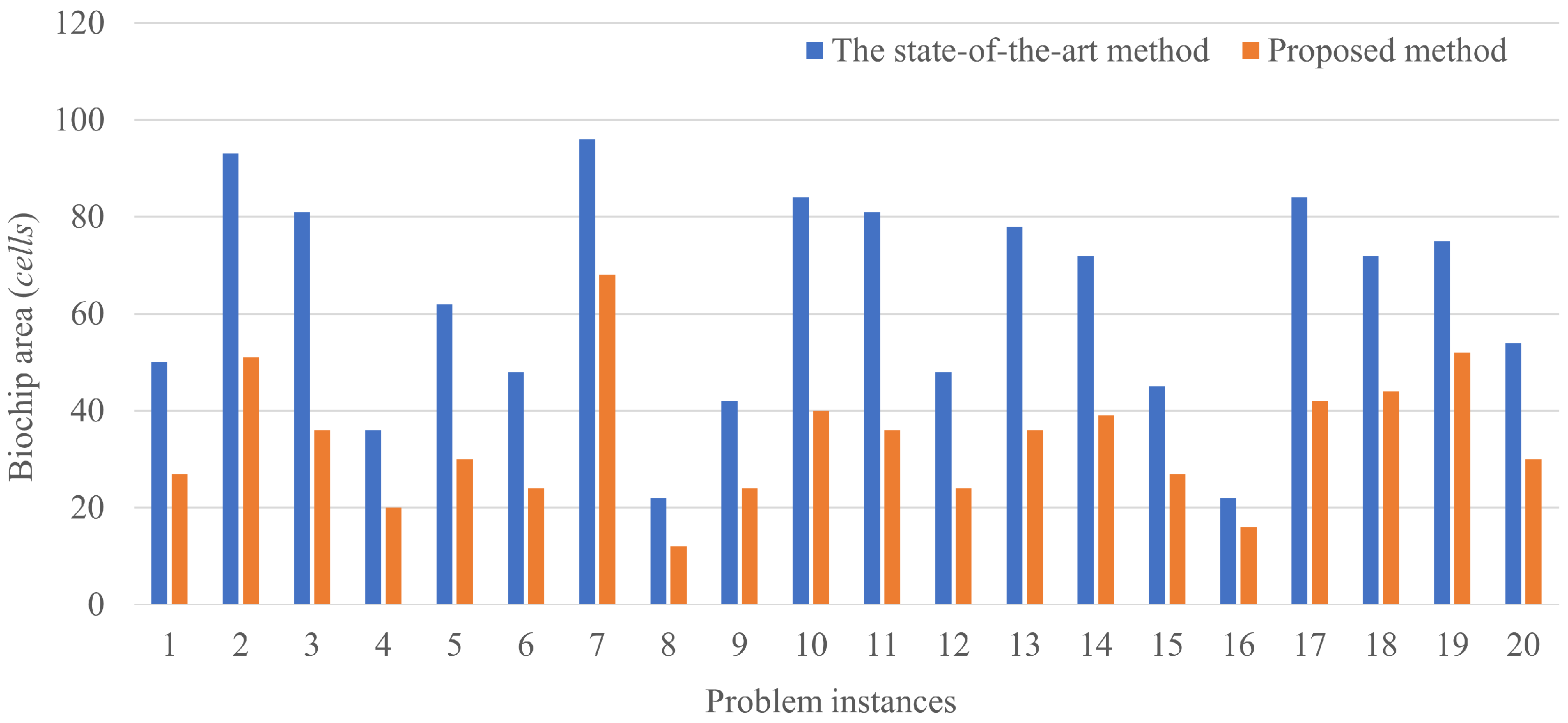
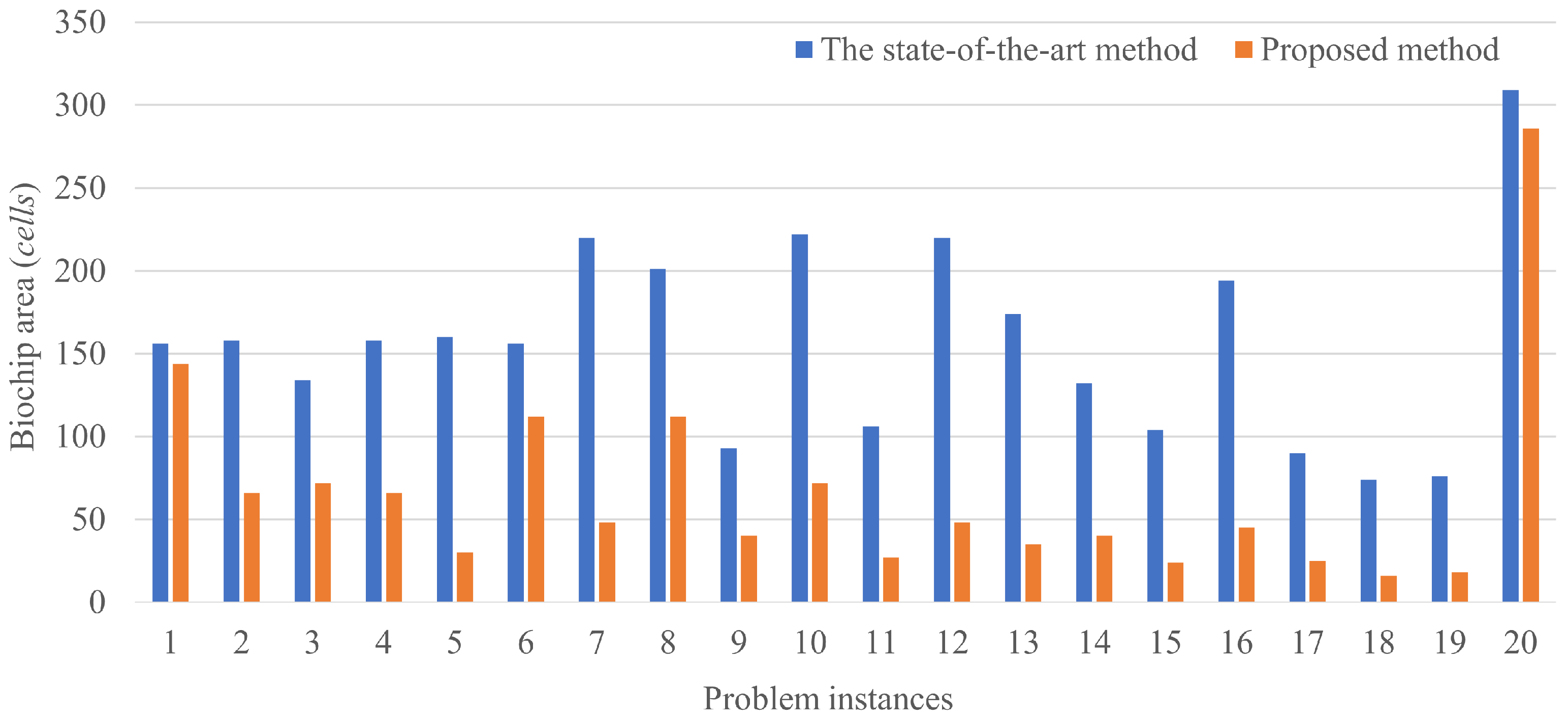
- A state-of-the-art method presented in [15], which initially inputs four/eight droplets onto the biochip for each experimental scenario.
- The proposed method inputs two/four droplets and splits them into four/eight droplets for each experimental scenario.
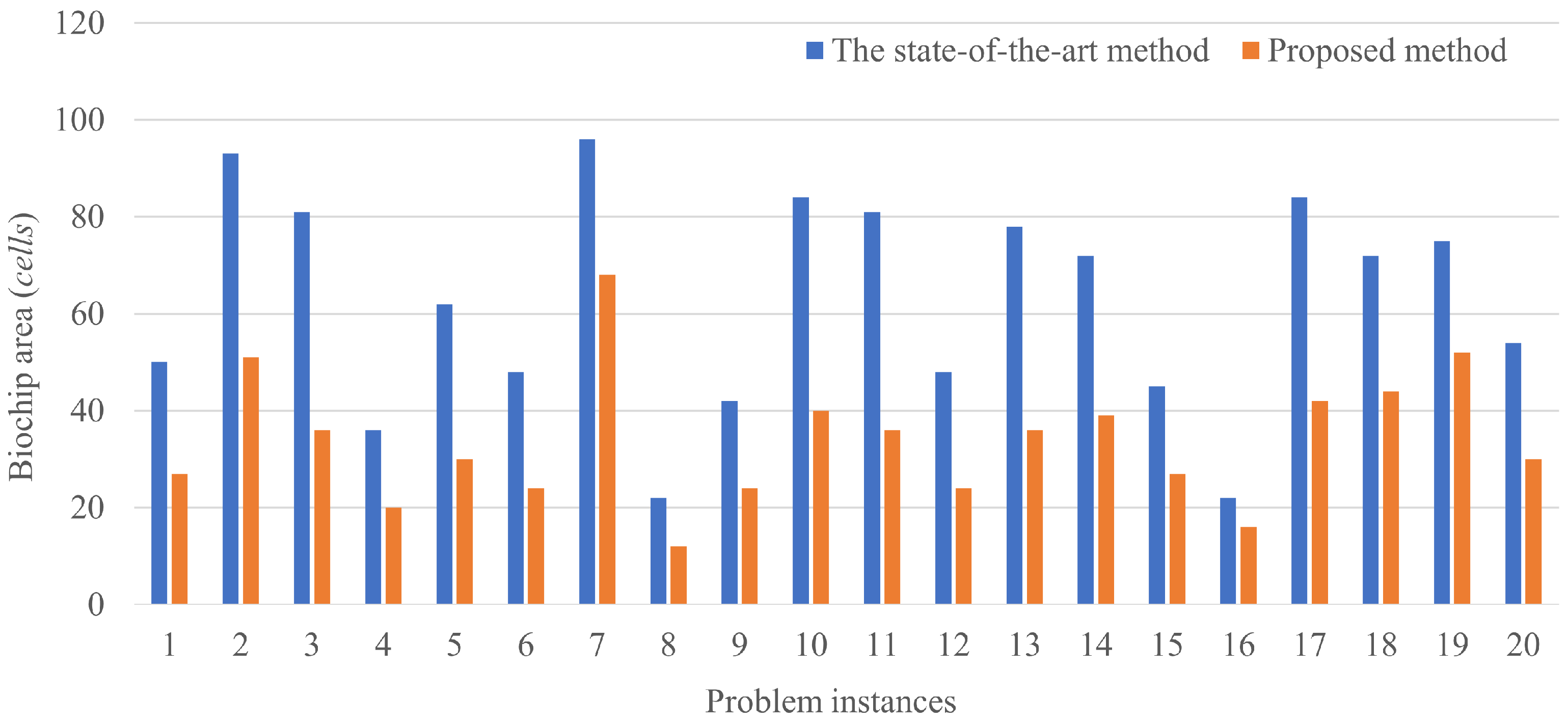
3.2. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gibson, L.L.; Fahey, N.M.; Hafer, N.; Buchholz, B.; Dunlap, D.R.; Murphy, R.L.; Achenbach, C.; Stone, C.; Cleeton, R.; O’Neal, J.; et al. The RADx Tech Clinical Studies Core: A Model for Academic Based Clinical Studies. IEEE Open J. Eng. Med. Biol. 2021, 2, 152–157. [Google Scholar] [CrossRef] [PubMed]
- Gou, Y.; Liu, J.; Sun, C.; Wang, P.; You, Z.; Ren, D. Inertial-Assisted Immunomagnetic Bioplatform towards Efficient Enrichment of Circulating Tumor Cells. Biosensors 2021, 11, 183. [Google Scholar] [CrossRef] [PubMed]
- Kutateladze, T.; Bitskinashvili, K.; Sapojnikova, N.; Kartvelishvili, T.; Asatiani, N.; Vishnepolsky, B.; Datukishvili, N. Development of Multiplex PCR Coupled DNA Chip Technology for Assessment of Endogenous and Exogenous Allergens in GM Soybean. Biosensors 2021, 11, 481. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Yang, J.; Hur, H.; Oh, S.; Lee, H. Highly Sensitive Colorimetric Assay of Cortisol Using Cortisol Antibody and Aptamer Sandwich Assay. Biosensors 2021, 11, 163. [Google Scholar] [CrossRef] [PubMed]
- Tsounidi, D.; Koukouvinos, G.; Christianidis, V.; Legaki, E.; Giogli, V.; Panagiotopoulou, K.; Taka, S.; Ekaterinidi, Z.; Kakabakos, S.; Raptis, I.; et al. Development of a Point-of-Care System Based on White Light Reflectance Spectroscopy: Application in CRP Determination. Biosensors 2021, 11, 268. [Google Scholar] [CrossRef]
- Sun, F.; Ganguli, A.; Nguyen, J.; Brisbin, R.; Shanmugam, K.; Hirschberg, D.L.; Wheeler, M.B.; Bashir, R.; Nash, D.M.; Cunningham, B.T. Smartphone-based multiplex 30-minute nucleic acid test of live virus from nasal swab extract. Lab Chip 2020, 20, 1621–1627. [Google Scholar] [CrossRef]
- Zeng, J.; Korsmeyer, T. Principles of droplet electrohydrodynamics for lab-on-a-chip. Lab Chip 2004, 4, 265–277. [Google Scholar] [CrossRef]
- Fei, S.; Chakrabarty, K. Architectural-level synthesis of digital microfluidics-based biochips. In Proceedings of the IEEE/ACM International Conference on Computer Aided Design, San Jose, CA, USA, 7–11 November 2004; pp. 223–228. [Google Scholar]
- Fair, R.B. Digital microfluidics: Is a true lab-on-a-chip possible? Microfluid. Nanofluidics 2007, 3, 245–281. [Google Scholar] [CrossRef]
- Keszocze, O.; Wille, R.; Drechsler, R. Exact routing for digital microfluidic biochips with temporary blockages. In Proceedings of the International Conference on Computer-Aided Design, San Jose, CA, USA, 2–6 November 2014. [Google Scholar]
- Keszocze, O.; Li, Z.; Grimmer, A.; Wille, R.; Chakrabarty, K.; Drechsler, R. Exact routing for micro-electrode-dot-array digital microfluidic biochips. In Proceedings of the Asia and South Pacific Design Automation Conference, Chiba, Japan, 16–19 January 2017. [Google Scholar]
- Liang, T.C.; Zhou, J.; Ho, T.-Y.; Chakrabarty, K.; Lee, C.-Y. Parallel droplet control in MEDA biochips using multi-agent reinforcement learning. In Proceedings of the International Conference on Machine Learning, Online, 18–24 July 2021; pp. 6588–6599. [Google Scholar]
- Das, C.; Muhuri, S.; Chakraborty, S.; Chakraborty, S. Security assessment for routing-based synthesis on cyberphysical MEDA-based digital microfluidic biochip. SN Appl. Sci. 2021, 3, 1–19. [Google Scholar] [CrossRef]
- Chakraborty, S.; Chakraborty, S. Routing performance optimization for homogeneous droplets on MEDA-based digital microfluidic biochips. In Proceedings of the Computer Society Annual Symposium on VLSI, Miami, FL, USA, 15–17 July 2019. [Google Scholar]
- Howladar, P.; Roy, P.; Rahaman, H. A High-performance Homogeneous Droplet Routing Technique for MEDA-based Biochips. ACM J. Emerg. Technol. Comput. Syst. 2019, 15, 1–37. [Google Scholar] [CrossRef]
- Shiro, C.; Nishikawa, H.; Kong, X.; Tomiyama, H.; Yamashita, S. Minimization of Routing Area in MEDA Biochips. In Proceedings of the IEEE Biomedical Circuits and Systems Conference (BioCAS), Berlin, Germany, 7–9 October 2021; pp. 1–5. [Google Scholar]
- Gao, L.; Lv, Q.; Xia, N.; Lin, Y.; Lin, F.; Han, B. Detection of Mercury Ion with High Sensitivity and Selectivity Using a DNA/Graphene Oxide Hybrid Immobilized on Glass Slides. Biosensors 2021, 11, 300. [Google Scholar] [CrossRef] [PubMed]
- Seok, Y.; Lee, J.; Kim, M.-G. Paper-Based Airborne Bacteria Collection and DNA Extraction Kit. Biosensors 2021, 11, 375. [Google Scholar] [CrossRef] [PubMed]
- Ferrari, E.; Palma, C.; Vesentini, S.; Occhetta, P.; Rasponi, M. Integrating Biosensors in Organs-on-Chip Devices: A Perspective on Current Strategies to Monitor Microphysiological Systems. Biosensors 2020, 10, 110. [Google Scholar] [CrossRef] [PubMed]
- Yang, L. A Review of Multifunctions of Dielectrophoresis in Biosensors and Biochips for Bacteria Detection. Anal. Lett. 2012, 45, 187–201. [Google Scholar] [CrossRef]
- Cho, M.; Pan, D.Z. A High-Performance Droplet Routing Algorithm for Digital Microfluidic Biochips. IEEE Trans. Comput. Des. Integr. Circuits Syst. 2008, 27, 1714–1724. [Google Scholar] [CrossRef]
- Keszocze, O.; Wille, R.; Chakrabarty, K.; Drechsler, R. A general and exact routing methodology for Digital Microfluidic Biochips. In Proceedings of the 2015 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), Austin, TX, USA, 2–6 November 2015; pp. 874–881. [Google Scholar] [CrossRef]
- Liang, T.C.; Zhong, Z. Adaptive droplet routing in digital microfluidic biochips using deep reinforcement learning. In Proceedings of the International Conference on Machine Learning, Online, 13–18 July 2020; pp. 6050–6060. [Google Scholar]
- Zhong, Z.; Li, Z.; Chakrabarty, K.; Ho, T.; Lee, C. Micro-electrode-dot-array digital microfluidic biochips: Technology, design automation, and test techniques. IEEE Trans. Biomed. Circuits Syst. 2018, 13, 292–313. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Lai, K.Y.-T.; Yu, P.-H.; Ho, T.-Y.; Chakrabarty, K.; Lee, C.-Y. High-level synthesis for micro-electrode-dot-array digital microfluidic biochips. In Proceedings of the 2016 53nd ACM/EDAC/IEEE Design Automation Conference (DAC), Austin, TX, USA, 5–9 June 2016; p. 146. [Google Scholar] [CrossRef]
- Zhong, Z.; Liang, T.-C.; Chakrabarty, K. Reliability-Oriented IEEE Std. 1687 Network Design and Block-Aware High-Level Synthesis for MEDA Biochips*. In Proceedings of the 2020 25th Asia and South Pacific Design Automation Conference (ASP-DAC), Beijing, China, 13–16 January 2020; pp. 544–549. [Google Scholar] [CrossRef]
- Li, Z.; Lai, K.Y.-T.; Yu, P.-H.; Chakrabarty, K.; Ho, T.-Y.; Lee, C.-Y. Droplet Size-Aware High-Level Synthesis for Micro-Electrode-Dot-Array Digital Microfluidic Biochips. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 612–626. [Google Scholar] [CrossRef] [PubMed]
- Roy, P.; Banerjee, A.; Wille, R.; Bhattacharya, B.B. Harnessing the Granularity of Micro-Electrode-Dot-Array Architectures for Optimizing Droplet Routing in Biochips. ACM Trans. Des. Autom. Electron. Syst. 2020, 25, 1–37. [Google Scholar] [CrossRef] [Green Version]
- Lai, K.Y.-T.; Yang, Y.-T.; Lee, C.-Y. An Intelligent Digital Microfluidic Processor for Biomedical Detection. J. Signal Process. Syst. 2014, 78, 85–93. [Google Scholar] [CrossRef]
- Lu, G.; Bhattacharya, B.B.; Tsung, H.; Hung, C. Multi-level droplet routing in active-matrix based digital-microfluidic biochips. In Proceedings of the Asia and South Pacific Design Automation Conference, Jeju, Korea, 22–25 January 2018. [Google Scholar]
- Luo, Y.; Bhattacharya, B.B.; Ho, T.-Y.; Chakrabarty, K. Design and Optimization of a Cyberphysical Digital-Microfluidic Biochip for the Polymerase Chain Reaction. IEEE Trans. Comput. Des. Integr. Circuits Syst. 2014, 34, 29–42. [Google Scholar] [CrossRef]
- Zhong, Z.; Li, Z.; Chakrabarty, K. Adaptive error recovery in MEDA biochips based on droplet-aliquot operations and predictive analysis. In Proceedings of the International Conference on Computer-Aided Design, Irvine, CA, USA, 12–16 November 2017; pp. 615–622. [Google Scholar]
- Zhong, Z.; Li, Z.; Chakrabarty, K. Adaptive and Roll-Forward Error Recovery in MEDA Biochips Based on Droplet-Aliquot Operations and Predictive Analysis. IEEE Trans. Multi-Scale Comput. Syst. 2018, 4, 577–592. [Google Scholar] [CrossRef]
- Wang, G. Field-Programmable Microfluidic Test Platform for Point-of-Care Diagnostics. Ph.D. Thesis, University of Saskatchewan, Saskatoon, Canada, 2013. [Google Scholar]
- Luo, Y.; Chakrabarty, K.; Ho, T. Error Recovery in Cyberphysical Digital Microfluidic Biochips. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2012, 32, 59–72. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of input droplets | |
| Chip size | |
| Input droplet size | |
| Target volume after split | |
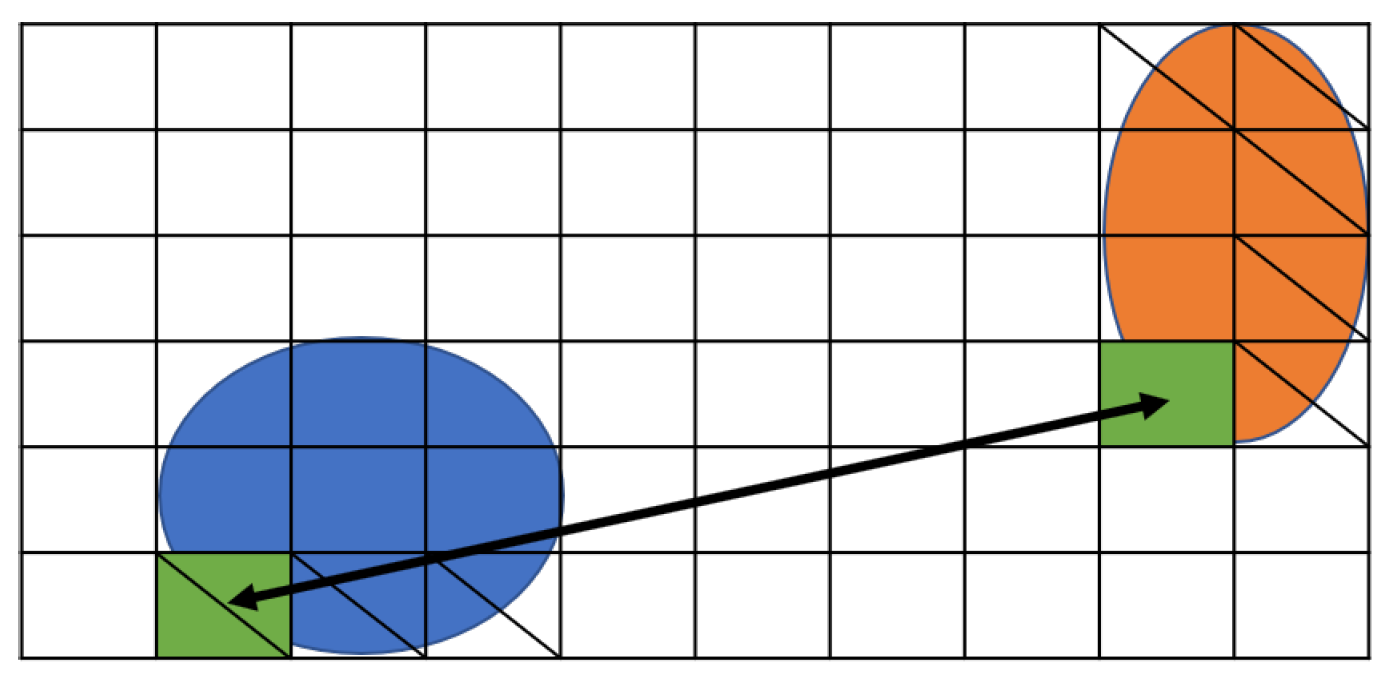
| Distance to avoid interference | B |
| Time required for the split operation |
| Case | The State-of-the-Art Method [15] | Proposed Method | ||||
|---|---|---|---|---|---|---|
| Droplet A | Droplet B | Droplet C | Droplet D | Droplet (A + B) | Droplet (C + D) | |
| 1 | 3 | 3 | 3 | 3 | 6 | 6 |
| 2 | 6 | 6 | 8 | 8 | 12 | 16 |
| 3 | 2 | 2 | 8 | 8 | 4 | 16 |
| 4 | 2 | 2 | 2 | 2 | 4 | 4 |
| 5 | 3 | 3 | 4 | 4 | 6 | 8 |
| 6 | 2 | 2 | 3 | 3 | 4 | 6 |
| 7 | 8 | 8 | 8 | 8 | 16 | 16 |
| 8 | 1 | 1 | 1 | 1 | 2 | 2 |
| 9 | 1 | 1 | 4 | 4 | 2 | 8 |
| 10 | 4 | 4 | 8 | 8 | 8 | 16 |
| 11 | 8 | 8 | 2 | 2 | 16 | 4 |
| 12 | 3 | 3 | 2 | 2 | 6 | 4 |
| 13 | 8 | 8 | 1 | 1 | 16 | 2 |
| 14 | 6 | 6 | 4 | 4 | 12 | 8 |
| 15 | 4 | 4 | 2 | 2 | 8 | 4 |
| 16 | 1 | 1 | 2 | 2 | 2 | 4 |
| 17 | 3 | 3 | 8 | 8 | 6 | 16 |
| 18 | 4 | 4 | 6 | 6 | 8 | 12 |
| 19 | 6 | 6 | 6 | 6 | 12 | 12 |
| 20 | 4 | 4 | 4 | 4 | 8 | 8 |
| Droplet | The State-of-the-Art Method [15] | Proposed Method | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case | A | B | C | D | E | F | G | H | (A + B) | (C + D) | (E + F) | (G + H) | |
| 1 | 4 | 4 | 6 | 6 | 4 | 4 | 6 | 6 | 8 | 12 | 8 | 12 | |
| 2 | 1 | 1 | 5 | 5 | 1 | 1 | 5 | 5 | 2 | 10 | 2 | 10 | |
| 3 | 4 | 4 | 3 | 3 | 4 | 4 | 3 | 3 | 8 | 6 | 8 | 6 | |
| 4 | 1 | 1 | 5 | 5 | 1 | 1 | 5 | 5 | 2 | 10 | 2 | 10 | |
| 5 | 5 | 5 | 2 | 2 | 5 | 5 | 2 | 2 | 10 | 4 | 10 | 4 | |
| 6 | 6 | 6 | 3 | 3 | 6 | 6 | 3 | 3 | 12 | 6 | 12 | 6 | |
| 7 | 7 | 7 | 4 | 4 | 7 | 7 | 4 | 4 | 14 | 8 | 14 | 8 | |
| 8 | 6 | 6 | 8 | 8 | 6 | 6 | 8 | 8 | 12 | 16 | 12 | 16 | |
| 9 | 4 | 4 | 2 | 2 | 4 | 4 | 2 | 2 | 8 | 4 | 8 | 4 | |
| 10 | 5 | 5 | 7 | 7 | 5 | 5 | 7 | 7 | 10 | 14 | 10 | 14 | |
| 11 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 6 | 6 | 6 | 6 | |
| 12 | 7 | 7 | 4 | 4 | 7 | 7 | 4 | 4 | 14 | 8 | 14 | 8 | |
| 13 | 8 | 8 | 1 | 1 | 8 | 8 | 1 | 1 | 16 | 2 | 16 | 2 | |
| 14 | 1 | 1 | 6 | 6 | 1 | 1 | 6 | 6 | 2 | 12 | 2 | 12 | |
| 15 | 3 | 3 | 2 | 2 | 3 | 3 | 2 | 2 | 6 | 4 | 6 | 4 | |
| 16 | 5 | 5 | 6 | 6 | 5 | 5 | 6 | 6 | 10 | 12 | 10 | 12 | |
| 17 | 1 | 1 | 4 | 4 | 1 | 1 | 4 | 4 | 2 | 8 | 2 | 8 | |
| 18 | 1 | 1 | 2 | 2 | 1 | 1 | 2 | 2 | 2 | 4 | 2 | 4 | |
| 19 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 4 | 4 | 4 | 4 | |
| 20 | 7 | 7 | 8 | 8 | 7 | 7 | 8 | 8 | 14 | 16 | 14 | 16 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shiro, C.; Nishikawa, H.; Kong, X.; Tomiyama, H.; Yamashita, S. Minimization of MEDA Biochip-Size in Droplet Routing. Biosensors 2022, 12, 277. https://doi.org/10.3390/bios12050277
Shiro C, Nishikawa H, Kong X, Tomiyama H, Yamashita S. Minimization of MEDA Biochip-Size in Droplet Routing. Biosensors. 2022; 12(5):277. https://doi.org/10.3390/bios12050277
Chicago/Turabian StyleShiro, Chiharu, Hiroki Nishikawa, Xiangbo Kong, Hiroyuki Tomiyama, and Shigeru Yamashita. 2022. "Minimization of MEDA Biochip-Size in Droplet Routing" Biosensors 12, no. 5: 277. https://doi.org/10.3390/bios12050277
APA StyleShiro, C., Nishikawa, H., Kong, X., Tomiyama, H., & Yamashita, S. (2022). Minimization of MEDA Biochip-Size in Droplet Routing. Biosensors, 12(5), 277. https://doi.org/10.3390/bios12050277