

A Flexible Pressure Sensor Based on Graphene/Epoxy Resin Composite Film and Screen Printing Process

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
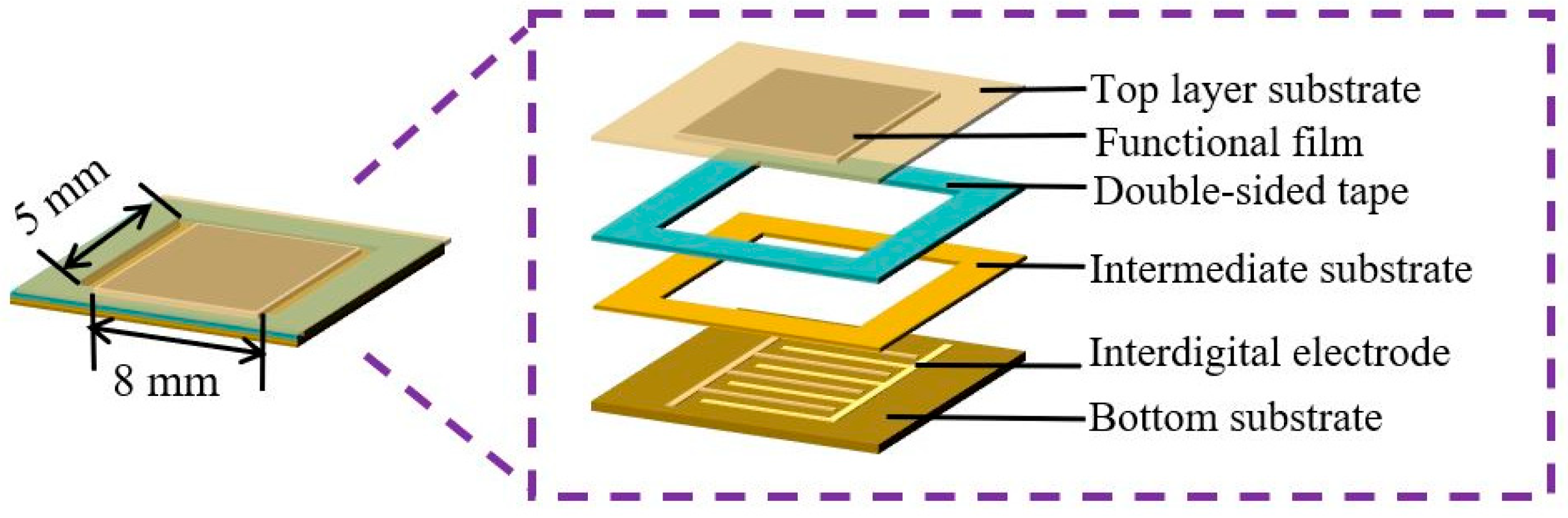
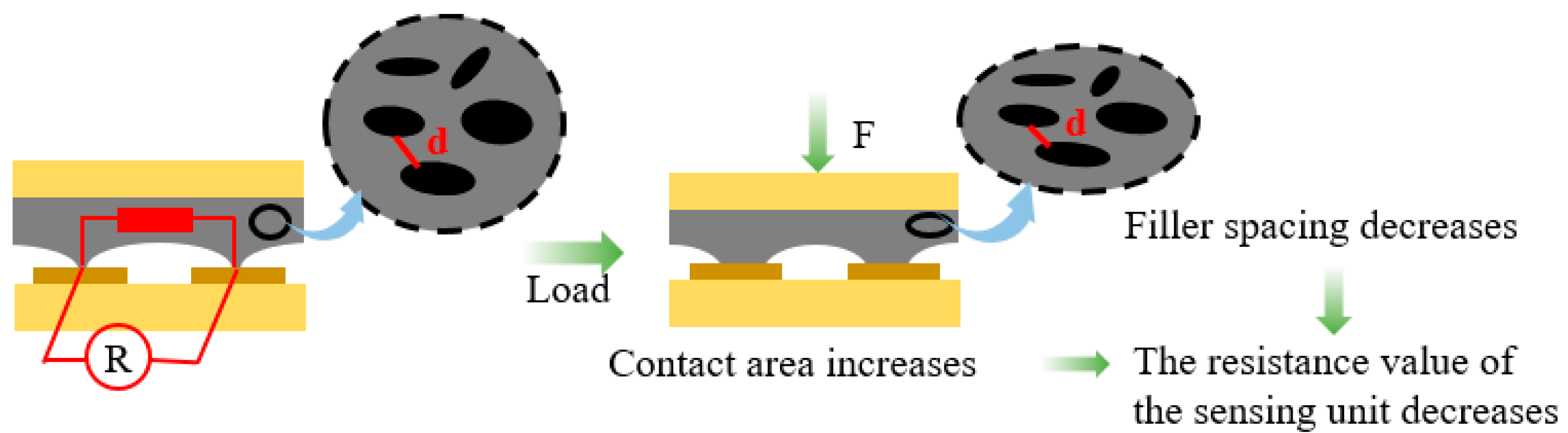
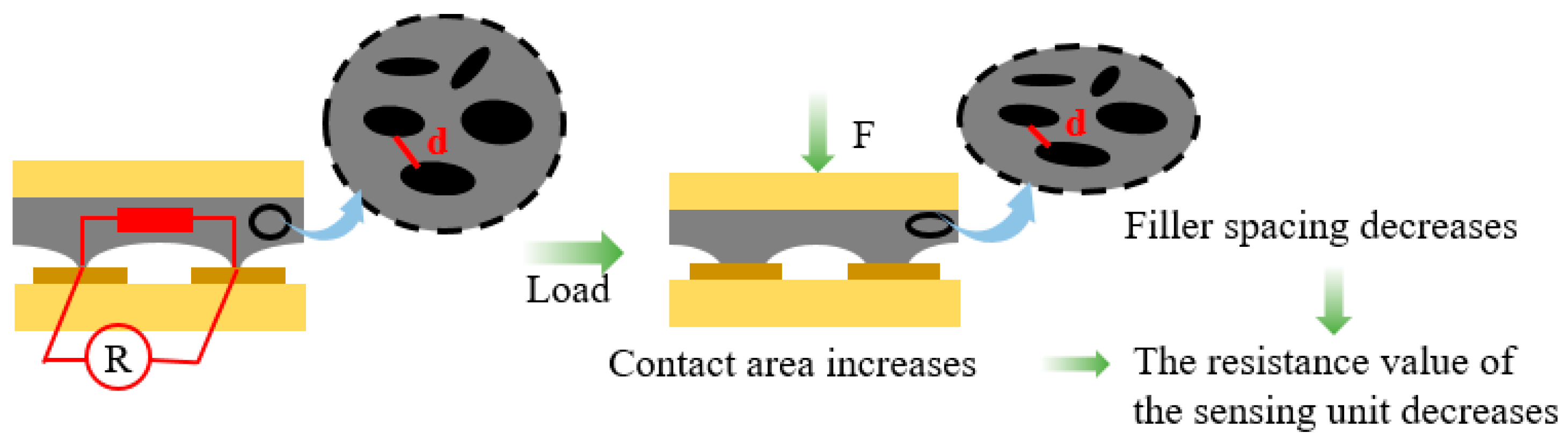
2.1. Structure Design and Principal Analysis of the Sensor
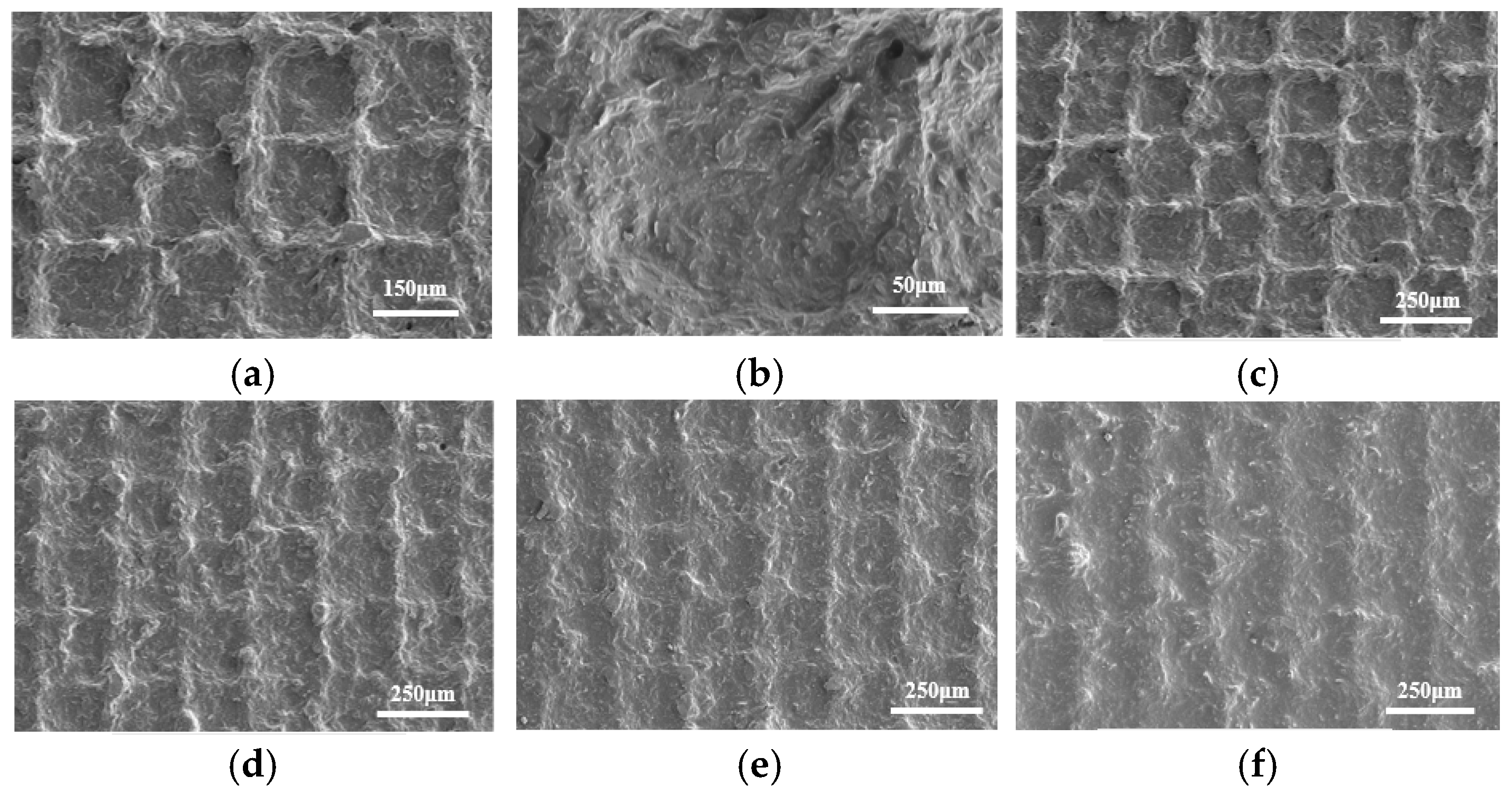
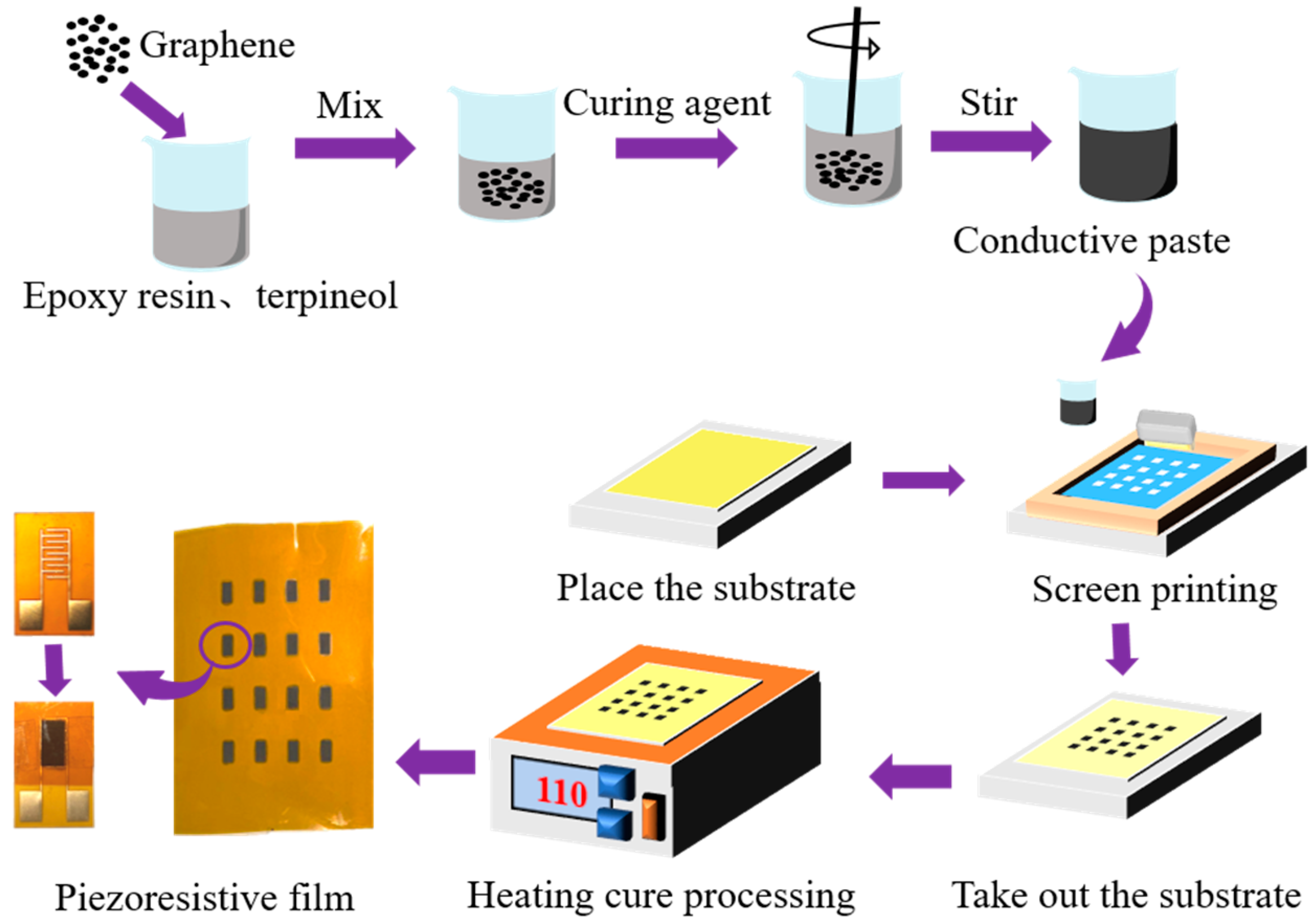
2.2. Preparation and Morphology Characterization of the Sensor
3. Results and Discussion
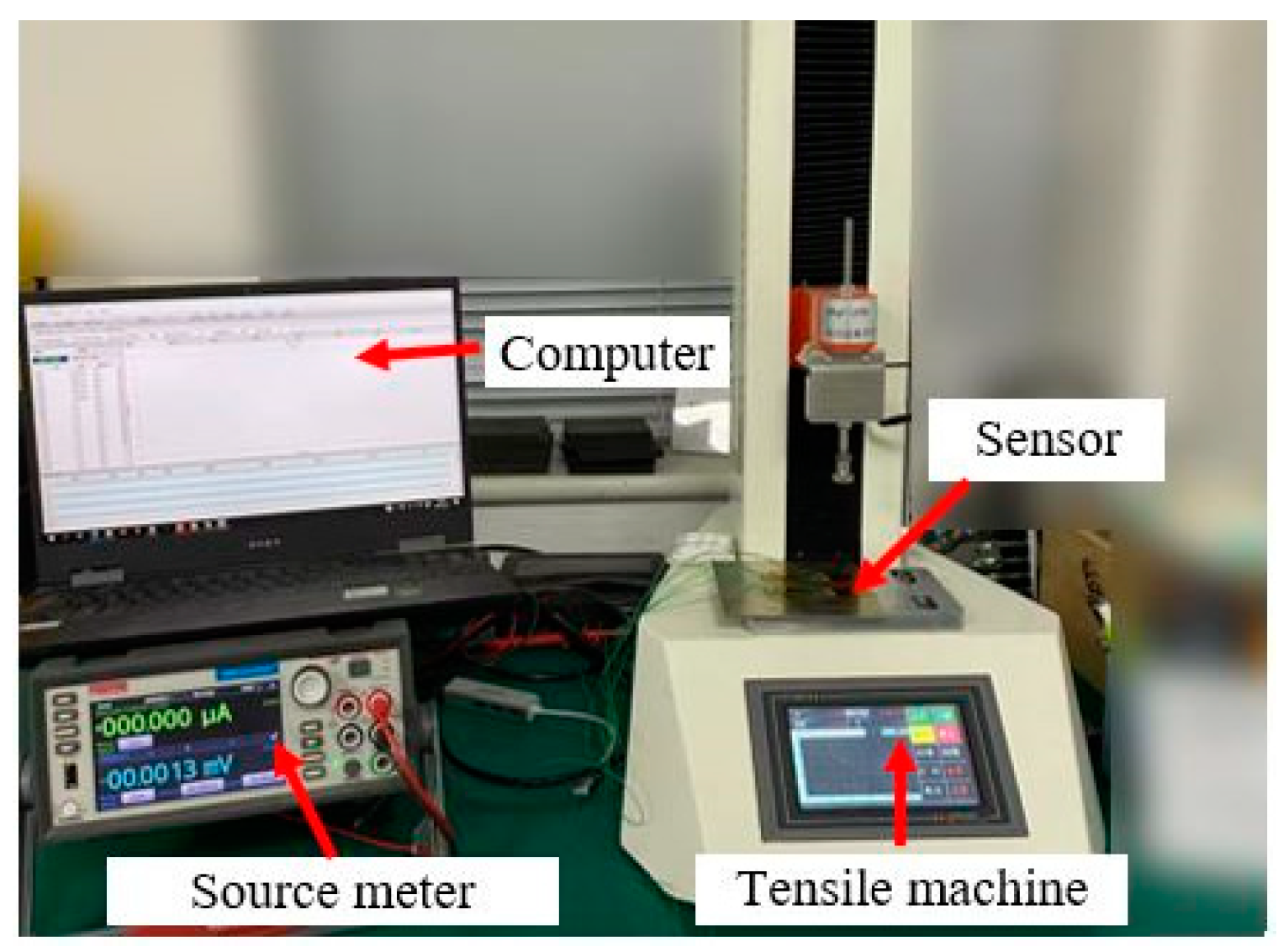
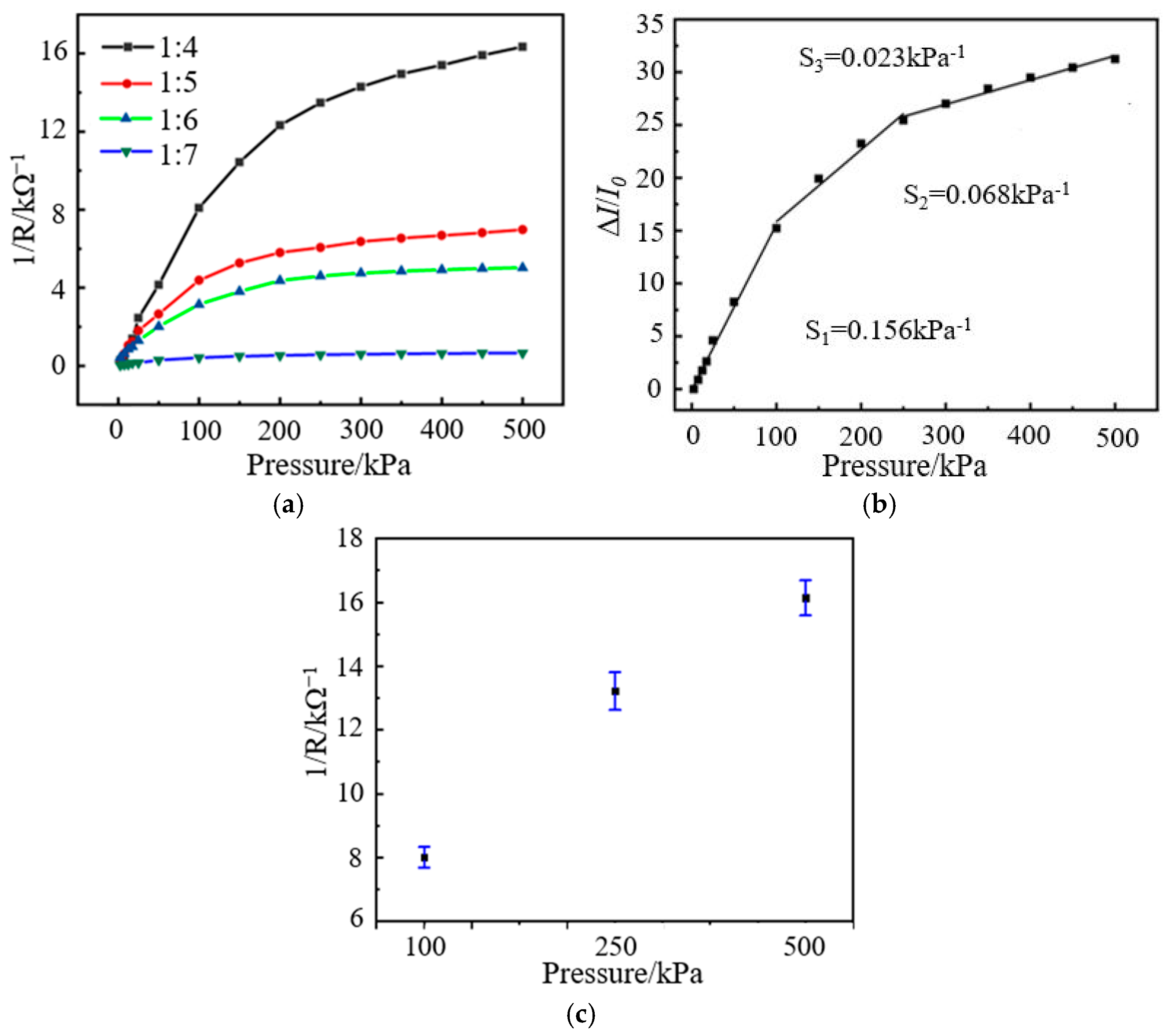
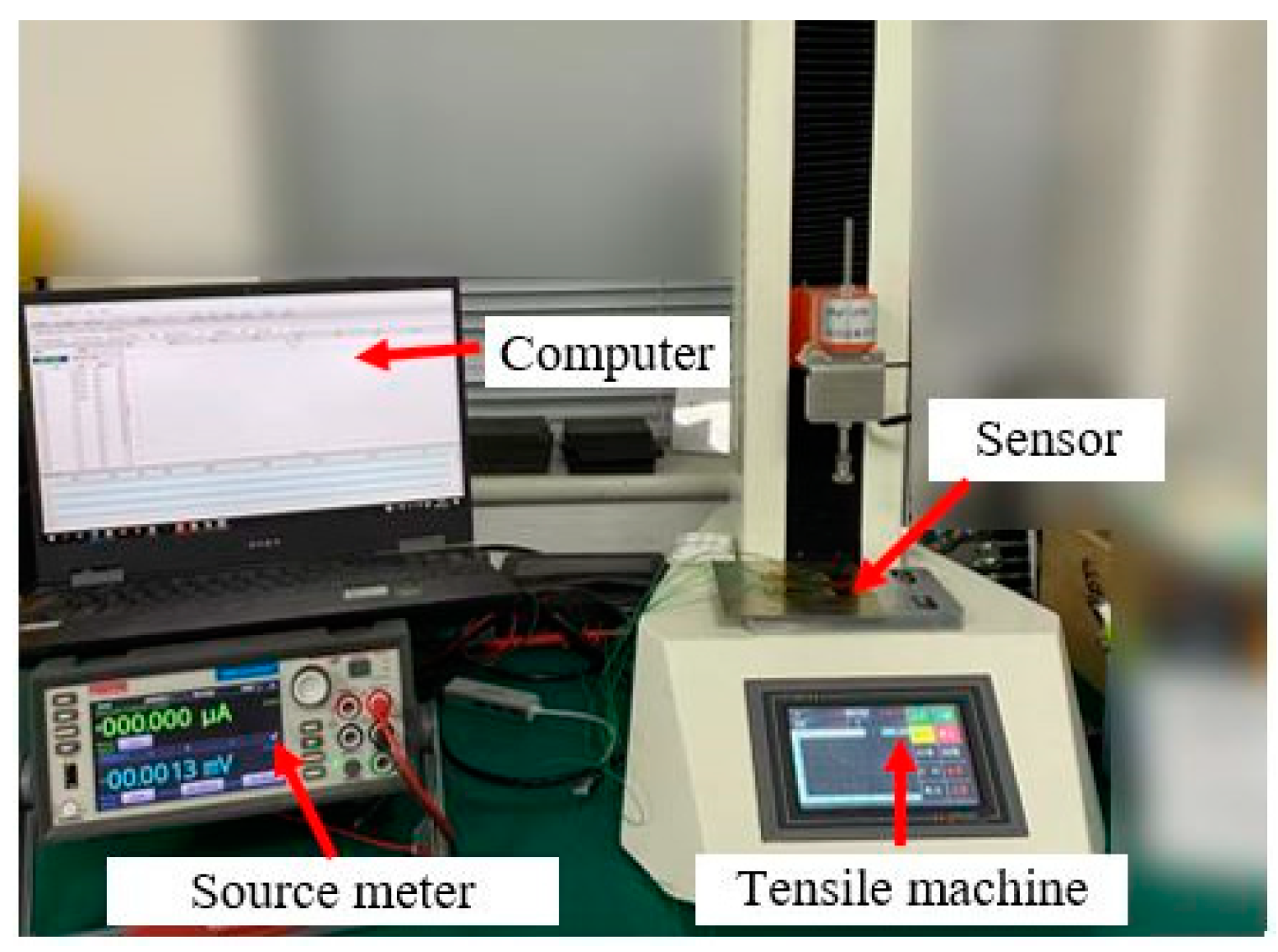
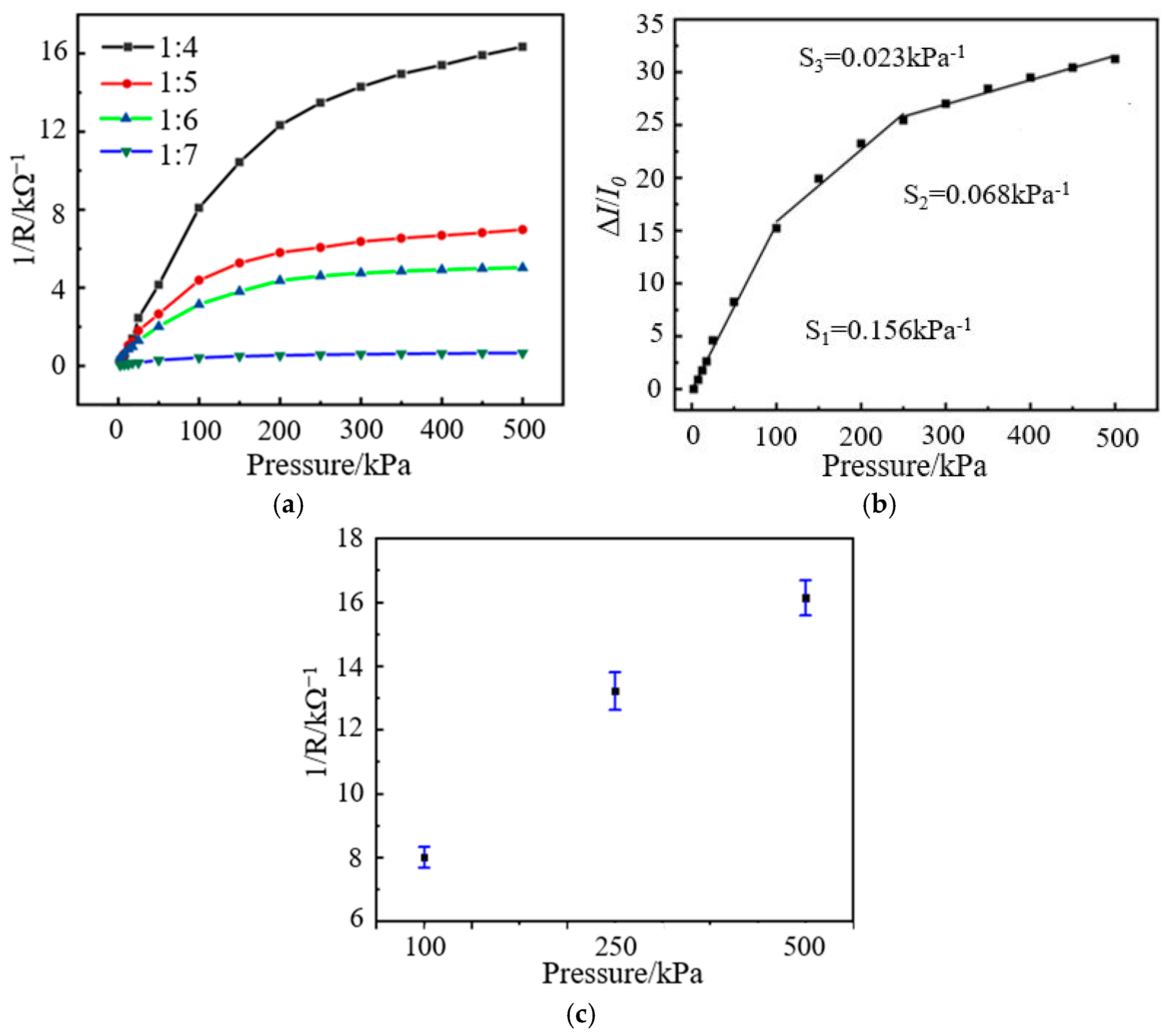
3.1. Pressure-Sensitive Performance Test of the Sensor
3.2. Response/Recovery Time Test of the Sensor
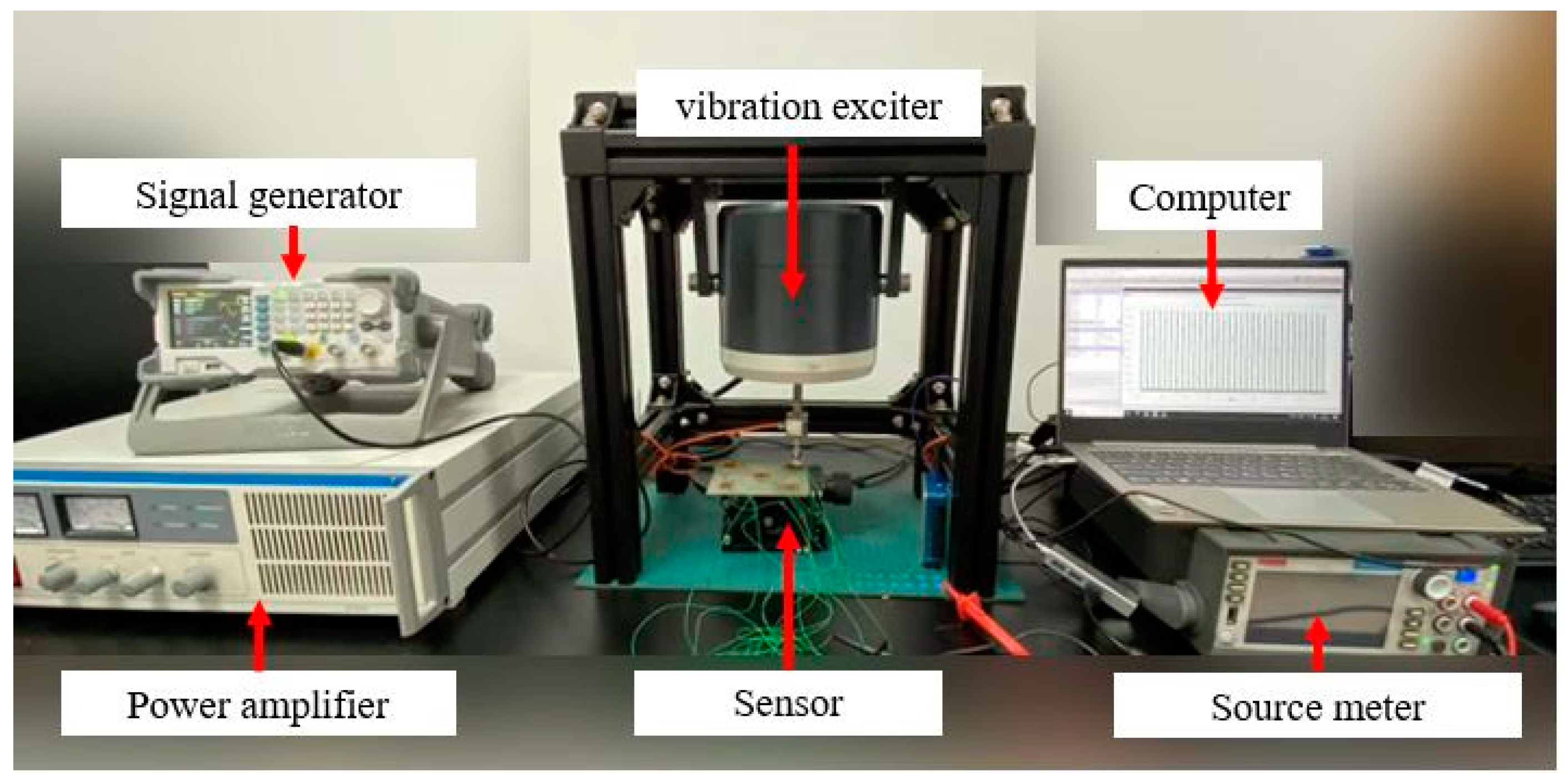
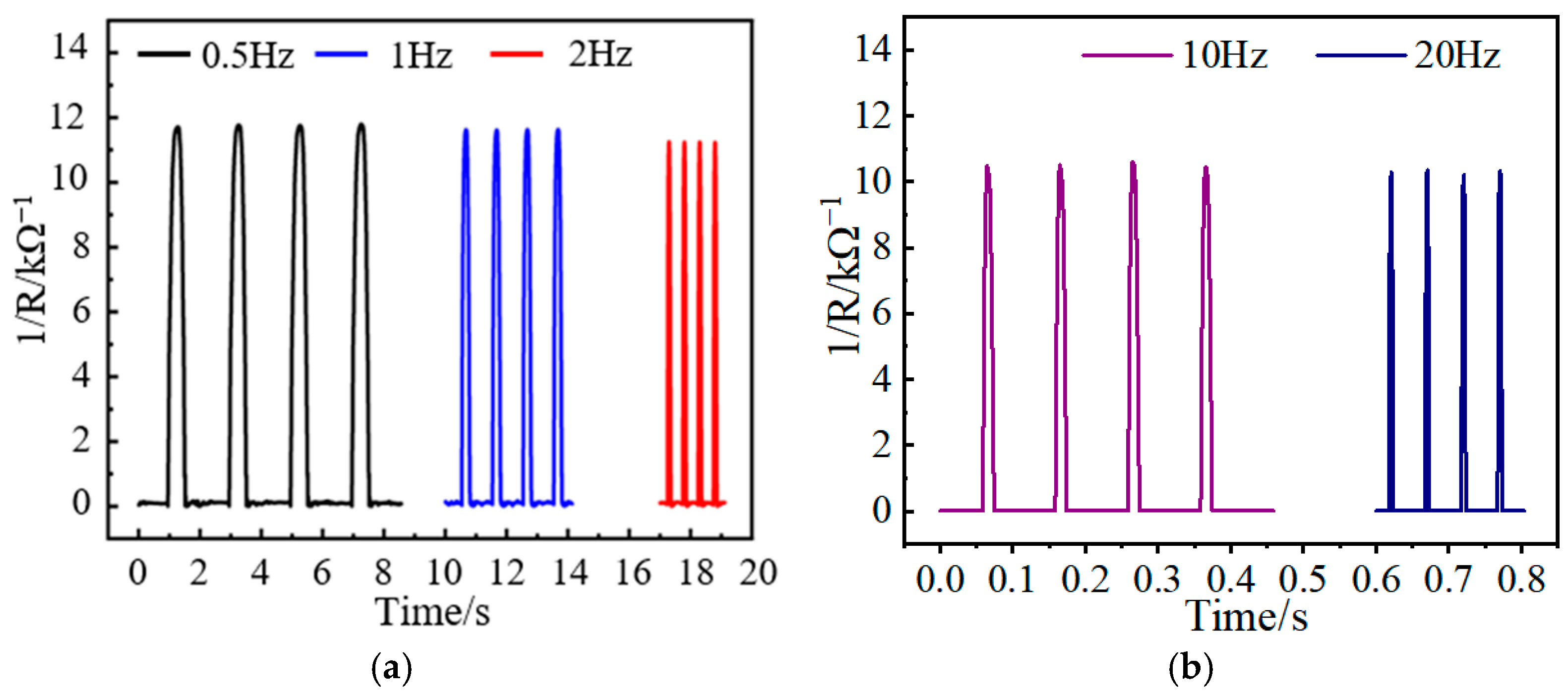
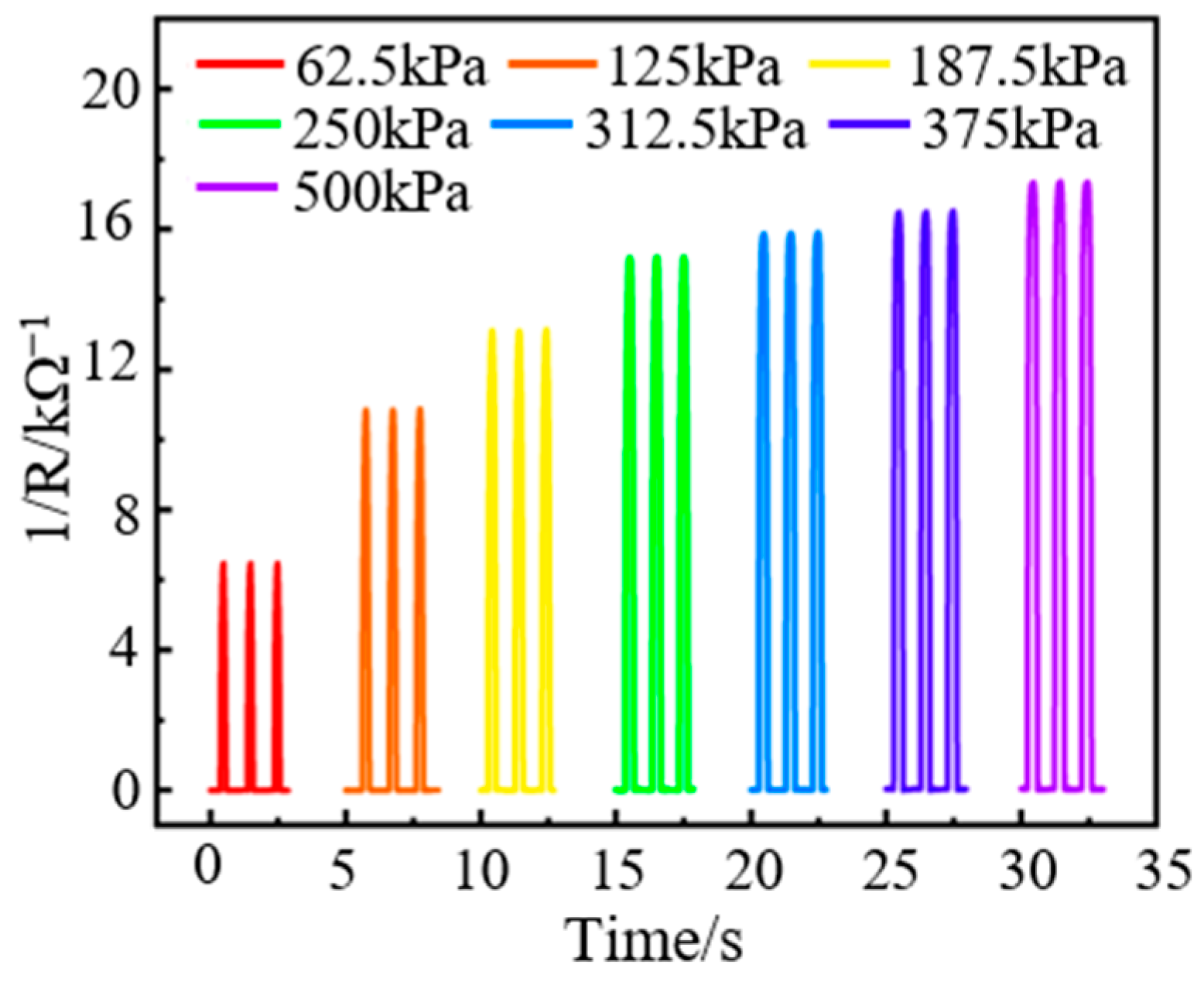
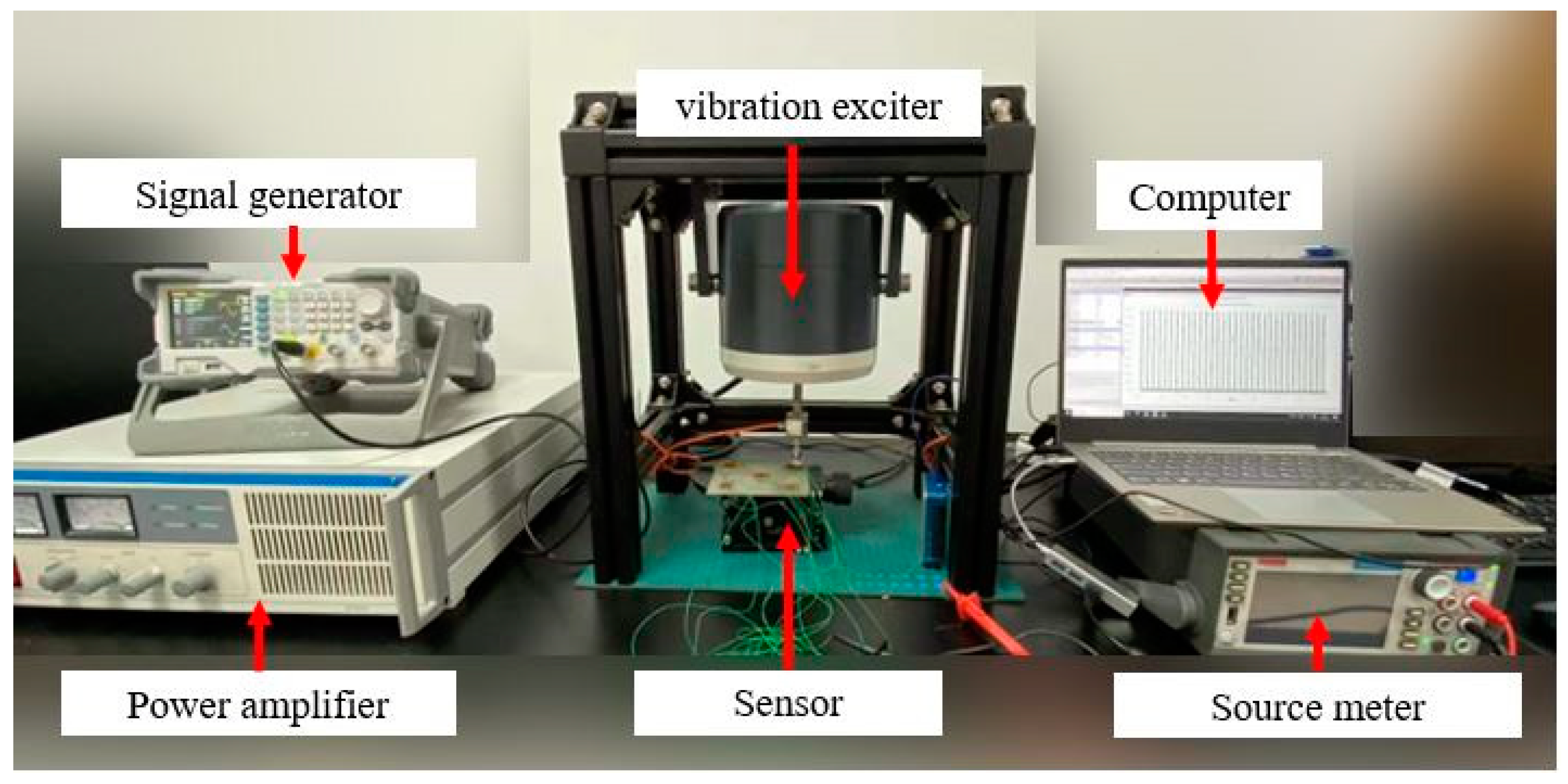
3.3. Dynamic Response Test of the Sensor
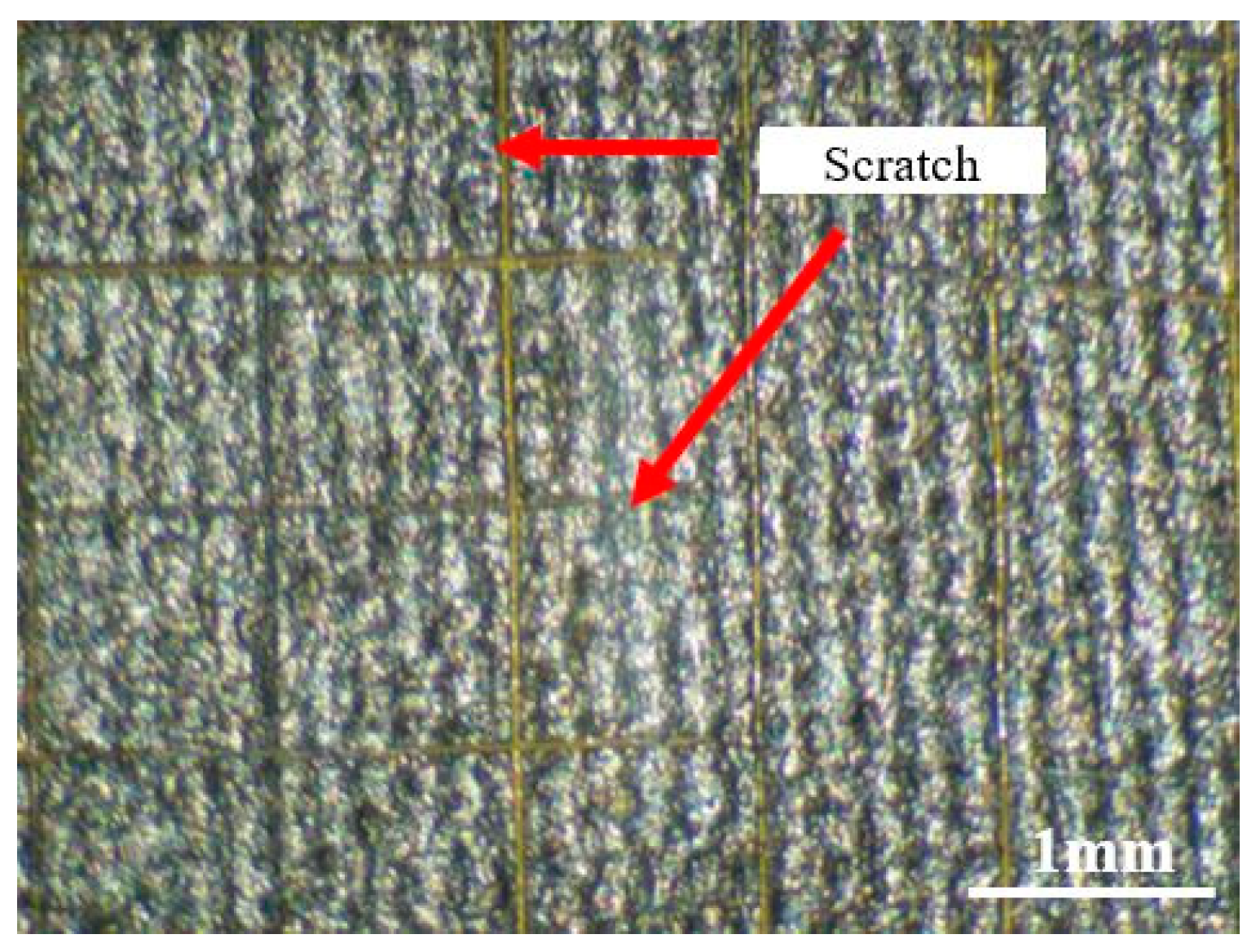
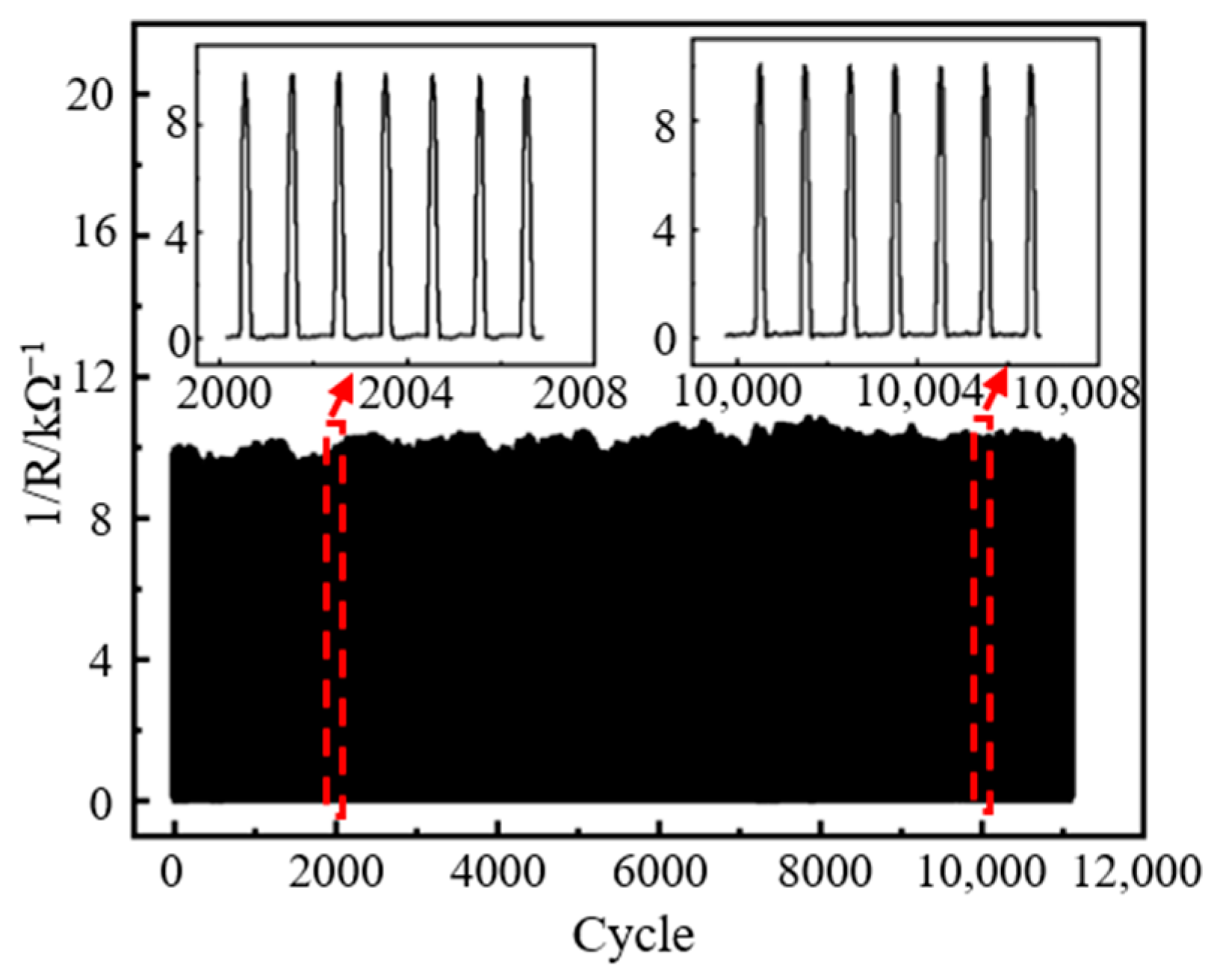
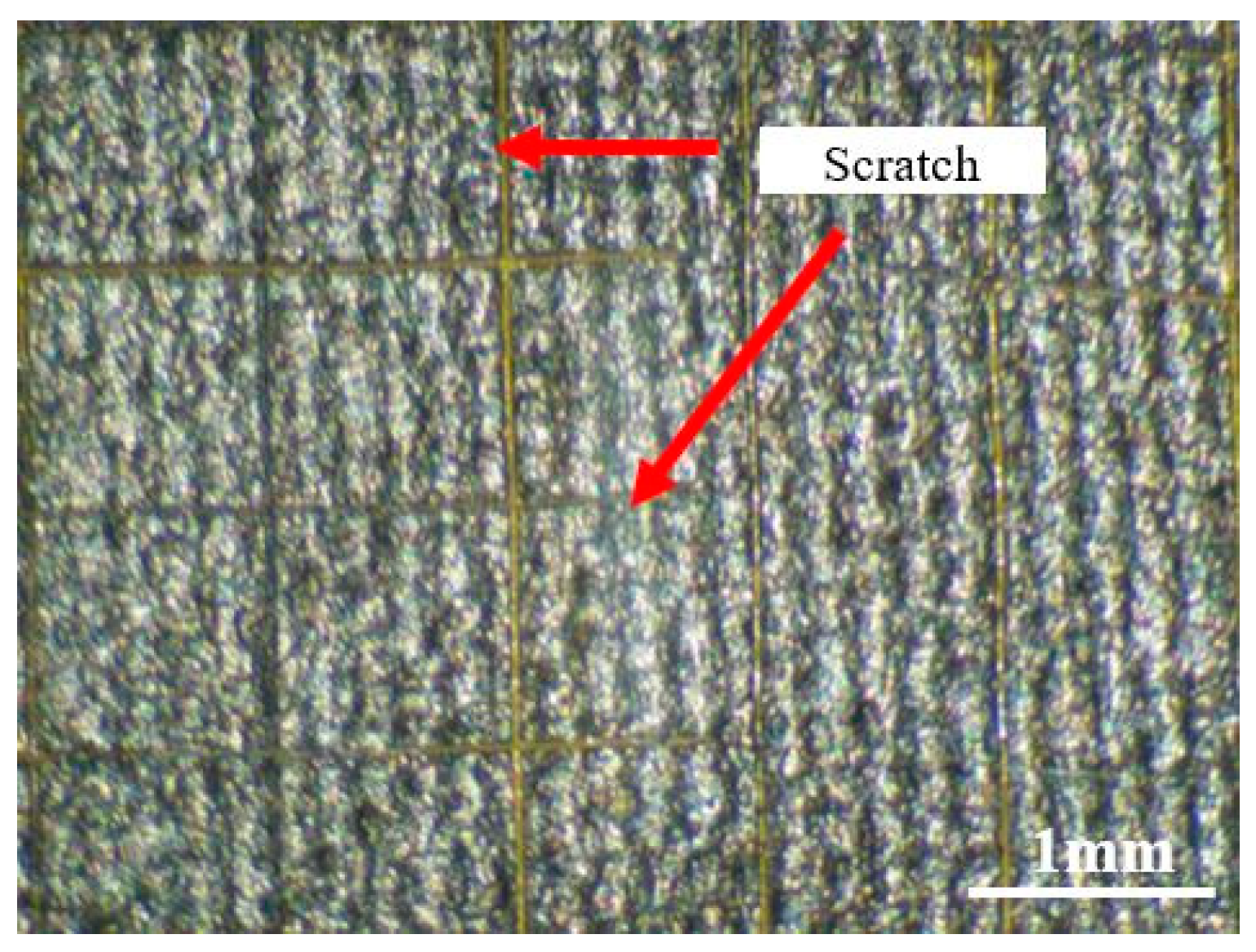
3.4. Durability and Adhesion Test of the Sensor
3.5. Performance Comparative Analysis of Different Sensors
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Duan, Y.H.; He, S.X.; Wu, J.; Su, B.; Wang, Y. Recent progress in flexible pressure sensor arrays. Nanomaterials 2022, 12, 2495. [Google Scholar] [CrossRef]
- Mangone, M.; Marinelli, E.; Santilli, G.; Finanore, N.; Agostini, F.; Santilli, V.; Bernetti, A.; Paoloni, M.; Zaami, S. Gait analysis advancements: Rehabilitation value and new perspectives from forensic application. Eur. Rev. Med. Pharmacol. Sci. 2023, 27, 3. [Google Scholar] [PubMed]
- Begg, R.; Kamruzzaman, J. A comparison of neural networks and support vector machines for recognizing young-old gait patterns. In Proceedings of the Conference on Convergent Technologies for Asia-Pacific Region, Bangalore, India, 15–17 October 2003; IEEE: Washington, DC, USA, 2003; pp. 354–358. [Google Scholar]
- Khant, M.; Gouwanda, D.; Gopalai, A.A.; Lim, K.H.; Foong, C.C. Estimation of lower extremity muscle activity in gait using the wearable inertial measurement units and neural network. Sensors 2023, 23, 556. [Google Scholar] [CrossRef]
- Bucinskas, V.; Dzedzickis, A.; Rozene, J.; Subaciute-Zemaitiene, J.; Satkauskas, I.; Uvarovas, V.; Bobina, R.; Morkvenaite-Vilkonciene, I. Wearable feet pressure sensor for human gait and falling diagnosis. Sensors 2021, 21, 5240. [Google Scholar] [CrossRef] [PubMed]
- Zhong, M.J.; Zhang, L.; Liu, X.; Zhou, Y.; Zhang, M.; Wang, Y.; Yang, L.; Wei, D. Wide linear range and highly sensitive flexible pressure sensor based on multistage sensing process for health monitoring and human-machine interfaces. Chem. Eng. J. 2021, 412, 128649. [Google Scholar] [CrossRef]
- Hammock, M.L.; Chortos, A.; Tee, C.K.; Tok, J.B.-H.; Bao, Z. 25th Anniversary Article: The evolution of electronic skin (E-Skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef] [PubMed]
- Meng, K.Y.; Xiao, X.; Wei, W.; Chen, G.; Nashalian, A.; Shen, S.; Xiao, X.; Chen, J. Wearable pressure sensors for pulse wave monitoring. Adv. Mater. 2022, 34, 2109357. [Google Scholar] [CrossRef] [PubMed]
- Basarir, F.; Madani, Z.; Vapaavuori, J. Recent advances in silver nanowire based flexible capacitive pressure sensors: From structure, fabrication to emerging applications. Adv. Mater. Interfaces 2022, 9, 2200866. [Google Scholar] [CrossRef]
- Liu, F.H.; Dai, S.P.; Cao, J.; Zhang, Z.; Cheng, G.; Ding, J. CNTs based capacitive stretchable pressure sensor with stable performance. Sens. Actuators A Phys. 2022, 343, 113672. [Google Scholar] [CrossRef]
- Hwang, J.; Kim, Y.; Yang, H.; Oh, J.H. Fabrication of hierarchically porous structured PDMS composites and their application as a flexible capacitive pressure sensor. Compos. Part B Eng. 2021, 211, 108607. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Y.; Sun, H.; Qing, X. A flexible ionic liquid-polyurethane sponge capacitive pressure sensor. Sens. Actuators A Phys. 2019, 285, 67–72. [Google Scholar] [CrossRef]
- Duan, Y.H.; Wu, J.; He, S.X.; Su, B.; Li, Z.; Wang, Y. Bioinspired spinosum capacitive pressure sensor based on CNT/PDMS nanocomposites for broad range and high sensitivity. Nanomaterials 2022, 12, 3265. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Luo, S.; Zhou, X.; Li, J.; Fu, J.; Yang, W.; Wei, D. Flexible, tunable, and ultrasensitive capacitive pressure sensor with microconformal graphene electrodes. ACS Appl. Mater. Interfaces 2019, 11, 14997–15006. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Song, H.; Long, M.; Saeed, G.; Lim, S. Mortise-tenon joint structured hydrophobic surface-functionalized barium titanate/polyvinylidene fluoride nanocomposites for printed self-powered wearable sensors. Nanoscale 2021, 13, 2542–2555. [Google Scholar] [CrossRef]
- Han, J.; Li, D.; Zhao, C.; Wang, X.; Li, J.; Wu, X. Highly sensitive impact sensor based on PVDF-TrFE/Nano-ZnO composite thin film. Sensors 2019, 19, 830. [Google Scholar] [CrossRef]
- Chen, B.; Li, H.M.; Tian, W.; Zhou, C. PZT based piezoelectric sensor for structural monitoring. J. Electron. Mater. 2019, 48, 2916–2923. [Google Scholar] [CrossRef]
- Yang, Y.; Pan, H.; Xie, G.; Jiang, Y.; Chen, C.; Su, Y.; Wang, Y.; Tai, H. Flexible piezoelectric pressure sensor based on polydopamine-modified BaTiO3/PVDF composite film for human motion monitoring. Sens. Actuators A Phys. 2020, 301, 111789. [Google Scholar] [CrossRef]
- Wang, S.; Shao, H.Q.; Liu, Y.; Tang, C.Y.; Zhao, X.; Ke, K.; Bao, R.Y.; Yang, M.B.; Yang, W. Boosting piezoelectric response of PVDF-TrFE via MXene for self-powered linear pressure sensor. Compos. Sci. Technol. 2021, 202, 108600. [Google Scholar] [CrossRef]
- Lee, J.; Yoon, H.; Kim, T.Y.; Gupta, M.K.; Lee, J.H.; Seung, W.; Ryu, H.; Kim, S.W. Micropatterned PVDF-TrFE film-based piezoelectric nanogenerators for highly sensitive self-powered pressure sensors. Adv. Funct. Mater. 2015, 25, 3203–3209. [Google Scholar] [CrossRef]
- Fan, F.; Tian, Z.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Chen, H.; Lu, Q.; Cao, X.; Wang, N.; Wang, Z.L. Natural polymers based triboelectric nanogenerator for harvesting biomechanical energy and monitoring human motion. Nano Res. 2022, 15, 2505–2511. [Google Scholar] [CrossRef]
- Qu, X.C.; Xue, J.T.; Liu, Y.; Rao, W.; Liu, Z.; Li, Z. Fingerprint-shaped triboelectric tactile sensor. Nano Energy 2022, 98, 107324. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric nanogenerator (TENG)—Sparking an energy and sensor revolution. Adv. Energy Mater. 2020, 10, 2000137. [Google Scholar] [CrossRef]
- Niu, S.; Wang, X.F.; Yi, F.; Zhou, Y.S.; Wang, Z.L. A universal self-charging system driven by random biomechanical energy for sustainable operation of mobile electronics. Nat. Commun. 2015, 6, 8975. [Google Scholar] [CrossRef]
- He, J.; Zhang, Y.F.; Zhou, R.H.; Meng, L.; Chen, T.; Mai, W.; Pan, C. Recent advances of wearable and flexible piezoresistivity pressure sensor devices and its future prospects. J. Mater. 2020, 6, 86–101. [Google Scholar] [CrossRef]
- Wang, Z.F.; Ye, X.Y. An investigation on piezoresistive behavior of carbon nanotube/polymer composites: II. Positive piezoresistive effect. Nanotechnology 2014, 25, 285502. [Google Scholar] [CrossRef]
- Duan, L.; D’Hooge, D.R.; Cardon, L. Recent progress on flexible and stretchable piezoresistive strain sensors: From design to application. Prog. Mater. Sci. 2019, 114, 100617. [Google Scholar] [CrossRef]
- Li, W.; Jin, X.; Han, X.; Li, Y.; Wang, W.; Lin, T.; Zhu, Z. Synergy of porous structure and microstructure in piezoresistive material for high-performance and flexible pressure sensors. ACS Appl. Mater. Interfaces 2021, 13, 19211–19220. [Google Scholar] [CrossRef]
- Chen, X.T.; Liu, C.G.; Liu, S.; Lyu, B.; Li, D. A high Compressibility pressure—Sensitive structure based on CB@PU yarn network. Sensors 2018, 18, 4141. [Google Scholar] [CrossRef]
- Fortunato, M.; Bellagamba, I.; Tamburrano, A.; Sarto, M.S. Flexible ecoflex/graphene nanoplatelet foams for highly sensitive low-pressure sensors. Sensors 2020, 20, 4406. [Google Scholar] [CrossRef]
- So, H.M.; Sim, J.W.; Kwon, J.; Yun, J.; Baik, S.; Chang, W.S. Carbon nanotube based pressure sensor for flexible electronics. Mater. Res. Bull. 2013, 48, 5036–5039. [Google Scholar] [CrossRef]
- Amit, M.; Chukoskie, L.; Skalsky, A.J.; Garudadri, H.; Ng, T.N. Flexible pressure sensors for objective assessment of motor disorders. Adv. Funct. Mater. 2020, 30, 1905241. [Google Scholar] [CrossRef]
- Cai, B.; Wang, L.Y.; Yu, F.; Jia, J.; Li, J.; Li, X.; Yang, X.; Jiang, Y.; Lü, W. Compressible piezoresistive pressure sensor based on Ag nanowires wrapped conductive carbonized melamine foam. Appl. Phys. A 2022, 128, 6. [Google Scholar] [CrossRef]
- Zhang, R.; Palumbo, A.; Hader, G.; Yan, K.; Chang, J.; Wang, H.; Yang, E.-H. A flexible pressure sensor with sandwiched carpets of vertically aligned carbon nanotubes partially embedded in polydimethylsiloxane substrates. IEEE Sens. J. 2020, 20, 12146–12153. [Google Scholar] [CrossRef]
- Su, B.; Gong, S.; Ma, Z.; Yap, L.W.; Cheng, W. Mimosa-inspired design of a flexible pressure sensor with touch sensitivity. Small 2015, 11, 1886–1891. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Xu, T.; Onyilagha, O.; Fong, H.; Zhu, Z. Recent advances in flexible and wearable pressure sensors based on piezoresistive 3D monolithic conductive sponges. ACS Appl. Mater. Interfaces 2019, 11, 6685–6704. [Google Scholar] [CrossRef]
- Li, T.K.; Chen, L.L.; Yang, X.; Chen, X.; Zhang, Z.; Zhao, T.; Li, X.; Zhang, J. A flexible pressure sensor based on an MXene–textile network structure. J. Mater. Chem. C 2019, 7, 1022–1027. [Google Scholar] [CrossRef]
- Yang, T.; Deng, W.; Chu, X.; Wang, X.; Hu, Y.; Fan, X.; Song, J.; Gao, Y.; Zhang, B.; Tian, G.; et al. Hierarchically microstructure-bioinspired flexible piezoresistive bioelectronics. ACS Nano 2021, 15, 11555–11563. [Google Scholar] [CrossRef]
- Yang, J.; Ye, Y.; Li, X.; Lü, X.; Chen, R. Flexible, conductive, and highly pressure-sensitive graphene-polyimide foam for pressure sensor application. Compos. Sci. Technol. 2018, 164, 187–194. [Google Scholar] [CrossRef]
- Cherni, Y.; Desmyttere, G.; Hajizadeh, M.; Bleau, J.; Mercier, C.; Begon, M. Effect of 3D printed foot orthoses stiffness on muscle activity and plantar pressures in individuals with flexible flatfeet: A statistical non-parametric mapping study. Clin. Biomech. 2022, 92, 105553. [Google Scholar] [CrossRef]
- Wu, X.; Liu, W.; Shi, F.; Yang, L.; Zhang, C. Constructing three-dimensional boron nitride network for highly thermally conductive epoxy resin composites. Polym. Compos. 2022, 43, 1711–1717. [Google Scholar] [CrossRef]
- Joshi, N.; Hayasaka, T.; Liu, Y.; Liu, H.; Oliveira, O.N., Jr.; Lin, L. A review on chemiresistive room temperature gas sensors based on metal oxide nanostructures, graphene and 2D transition metal dichalcogenides. Microchim. Acta 2018, 185, 213. [Google Scholar] [CrossRef]
- Jia, Y.T.; Gong, J.; Gu, X.H.; Kim, H.Y.; Dong, J.; Shen, X.Y. Fabrication and characterization of poly (vinyl alcohol)/chitosan blend nanofibers produced by electrospinning method. Carbohydr. Polym. 2007, 67, 403–409. [Google Scholar] [CrossRef]
- Choi, J.J.; Lee, J.H.; Hahn, B.D.; Yoon, W.-H.; Park, D.-S. Co-firing of PZN-PZT/Ag multilayer actuator prepared by tape-casting method. Mater. Res. Bull. 2008, 43, 483–490. [Google Scholar] [CrossRef]
- Wan, Z.; Xu, M.; Fu, Z.; Li, D.; Mei, A.; Hu, Y.; Rong, Y.; Han, H. Screen printing process control for coating high throughput titanium dioxide films toward printable mesoscopic perovskite solar cells. Front. Optoelectron. China 2019, 12, 344–351. [Google Scholar] [CrossRef]
- Xia, P.; Liu, P.; Wu, S.; Zhang, Q.; Wang, P.; Hu, R.; Xing, K.; Liu, C.; Song, A.; Yang, X.; et al. Highly stretchable and sensitive flexible resistive strain sensor based on waterborne polyurethane polymer for wearable electronics. Compos. Sci. Technol. 2022, 221, 109355. [Google Scholar] [CrossRef]
- Garboczi, E.J.; Snyder, K.A.; Douglas, J.F.; Thorpe, M.F. Geometrical percolation threshold of overlapping ellipsoids. Phys. Rev. E 1995, 52, 819–828. [Google Scholar] [CrossRef]
- Simmons, J.G. Generalized formula for the electric tunnel effect between similar electrodes separated by a thin insulating film. J. Appl. Phys. 1963, 34, 1793–1803. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, D.; Sun, Z.; Zhou, S.; Li, W.; Li, C.; Li, W.; Tang, W.; Wang, Z.L. Active-Matrix Sensing Array Assisted with Machine-Learning Approach for Lumbar Degenerative Disease Diagnosis and Postoperative Assessment. Adv. Funct. Mater. 2022, 32, 2113008. [Google Scholar] [CrossRef]
- Devi, R.; Gill, S.S. Performance Investigation of Carbon Nanotube Based Temperature Compensated Piezoresistive Pressure Sensor. Silicon 2022, 14, 3931–3938. [Google Scholar] [CrossRef]
- Zhu, J.; Xue, X.; Li, J.; Wang, J.; Wang, H.; Xing, Y.; Zhu, P. Flexible pressure sensor with a wide pressure measurement range and an agile response based on multiscale carbon fibers/carbon nanotubes composite. Microelectron. Eng. 2022, 257, 111750. [Google Scholar] [CrossRef]
- Wang, F.; Tan, Y.; Peng, H.; Meng, F.; Yao, X. Investigations on the Preparation and Properties of High-sensitive BaTiO3/MwCNTs/PDMS Flexible Capacitive Pressure Sensor. Mater. Lett. 2021, 303, 130512. [Google Scholar] [CrossRef]
- El-Hacha, R.; Amiri, M.; Hudecek, M.; Skabar, K. Durability Performance of Various Corrosion Resistant Reinforcing Materials Under Severe Environmental Exposure. In 8th International Conference on Advanced Composite Materials in Bridges and Structures; Springer: Cham, Switzerland, 2022; Volume 267, pp. 11–19. [Google Scholar]
- GB/T 9286-1998 (ISO 2409:1992). Available online: https://www.doc88.com/p-7304389305345.html (accessed on 17 July 2023).
- Zhang, X.; Su, F.; Sun, J.; Li, Z. Synthesis of 2D Black Phosphorus/Polytetrafluoroethylene/Waterborne Polyurethane Nanocomposite Coatings and Study on Its Tribological Properties. Tribology 2023, 43, 337–346. [Google Scholar]
- ASTM-D3359-2017. Available online: https://www.galvanizeit.com/uploads/resources/ASTM-D-3359-yr-2010.pdf (accessed on 17 July 2023).
- Rodriguez, R.D.; Fatkullin, M.; Garcia, A.; Petrov, I.; Averkiev, A.; Lipovka, A.; Lu, L.; Shchadenko, S.; Wang, R.; Sun, J.; et al. Laser-Engineered Multifunctional Graphene-Glass Electronics. Adv. Mater. 2022, 34, 2206877. [Google Scholar] [CrossRef] [PubMed]
- Young, K.O.; Jin, L.S.; Hak, O.J. Wearable high-performance pressure sensors based on three-dimensional electrospun conductive nanofibers. Npg Asia Mater. 2018, 10, 1. [Google Scholar]
- Li, Z.; Zhang, B.; Li, K.; Zhang, T.; Yang, X. A wide linearity range and high sensitivity flexible pressure sensor with hierarchical microstructures via laser marking. J. Mater. Chem. C 2020, 8, 3088–3096. [Google Scholar] [CrossRef]
- Zheng, Y.; Yin, R.; Zhao, Y.; Liu, H.; Zhang, D.; Shi, X.; Zhang, B.; Liu, C.; Shen, C. Conductive MXene/cotton fabric based pressure sensor with both high sensitivity and wide sensing range for human motion detection and E-skin. Chem. Eng. J. 2020, 420, 127720. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass Ratio | Graphene/g | Epoxy Resin/g | Polyether Amine/g | Terpinol/g |
|---|---|---|---|---|
| 1:3 | 0.108 | 0.294 | 0.165 | 0.316 |
| 1:4 | 0.108 | 0.415 | 0.214 | 0.319 |
| 1:5 | 0.099 | 0.515 | 0.240 | 0.333 |
| 1:6 | 0.103 | 0.592 | 0.310 | 0.344 |
| 1:7 | 0.110 | 0.710 | 0.379 | 0.295 |
| 1:10 | 0.110 | 1.018 | 0.520 | 0.314 |
| Classification | GB/T 9286-1998 (ISO 2409:1992) | ASTM D3359-2017 | Description |
|---|---|---|---|
| 1 | 0 | 5B | Edges of the cuts are completely smooth; none of the squares of the lattice is detached |
| 2 | 1 | 4B | A cross-cut area not greater than 5% is affected |
| 3 | 2 | 3B | A cross-cut area greater than 5%, but not greater than 15%, is affected |
| 4 | 3 | 2B | A cross-cut area greater than 15%, but not greater than 35%, is affected |
| 5 | 4 | 1B | A cross-cut area greater than 35%, but not greater than 65%, is affected |
| 6 | 5 | 0B | Any degree of flaking that cannot even be classified by classification 4 |
| Material | Pressure Range/kPa | Response Time/ms | Recovery Time/ms | Adhesion | Ref. |
|---|---|---|---|---|---|
| 3D PVDF-Hep/PEDOT nanofibers | 0–5 | 400 | 200 | / | [59] |
| P-HCF | 0.02–600 | 40 | 20 | / | [6] |
| rGO-PDMS | >200 | 15 | 20 | / | [60] |
| MXene/cotton fabric | 0–160 | 50 | 20 | / | [61] |
| MXene-textile | 29–40 | 26 | 50 | / | [38] |
| Graphene/epoxy | 2.5–500 | 40.8 | 3.7 | ASTM-5B | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Q.; Zhang, F.; Xu, X.; Yang, H.; Mao, Q.; Xian, D.; Yao, K.; Meng, Q. A Flexible Pressure Sensor Based on Graphene/Epoxy Resin Composite Film and Screen Printing Process. Nanomaterials 2023, 13, 2630. https://doi.org/10.3390/nano13192630
Lin Q, Zhang F, Xu X, Yang H, Mao Q, Xian D, Yao K, Meng Q. A Flexible Pressure Sensor Based on Graphene/Epoxy Resin Composite Film and Screen Printing Process. Nanomaterials. 2023; 13(19):2630. https://doi.org/10.3390/nano13192630
Chicago/Turabian StyleLin, Qijing, Fuzheng Zhang, Xiangyue Xu, Haolin Yang, Qi Mao, Dan Xian, Kun Yao, and Qingzhi Meng. 2023. "A Flexible Pressure Sensor Based on Graphene/Epoxy Resin Composite Film and Screen Printing Process" Nanomaterials 13, no. 19: 2630. https://doi.org/10.3390/nano13192630
APA StyleLin, Q., Zhang, F., Xu, X., Yang, H., Mao, Q., Xian, D., Yao, K., & Meng, Q. (2023). A Flexible Pressure Sensor Based on Graphene/Epoxy Resin Composite Film and Screen Printing Process. Nanomaterials, 13(19), 2630. https://doi.org/10.3390/nano13192630