Abstract
This article is devoted to the issues of creating an adaptive intelligent system, for monitoring and controlling the technological process for electrochemical corrosion protection of main pipelines (MP), which has been designed for remote control of electrochemical protection (EChP) parameters and their optimization as well as adaptive control of the parameters of cathodic protection stations while taking into account changes in external conditions. The multi-objective problem of optimizing the operating modes of cathodic protection stations (CPS) is considered because optimization is carried out according to both the criterion of optimal distribution of the protective potential (uniform distribution of the protective total (pipe-to-soil) potential along the length of the pipeline) and to the criterion of the minimum total protective current of stations. The structure of the distributed electrochemical protection system is described in the article. A more complete picture of the protection of the pipeline and solving the problems of optimizing the electrochemical protection modes in real time is possible due to remote monitoring of control and measuring points (CMP) in the middle of the pipeline between neighboring cathodic protection stations, as well as in all corrosion and hazardous zones where they are also installed. In addition to the often-used GSM/GPRS networks in electrochemical protection systems, an energy-efficient LPWAN (Low-Power Wide-Area Network) data transmission network is also used and data collection is carried out using a cloud IoT platform. The functionality of the system is described, web application screens are shown in various operating modes for remote monitoring and control of the protective parameters of cathodic protection stations is reported. Analytical data processing for the tasks assessing the protection of objects in the pipeline system against corrosion are also shown. The system ensures that the electrochemical protection process is maintained at an optimal level between the destructive zones of “underprotection” and “overprotection”, taking into account monitoring data, geological conditions at the pipeline site, climatic or seasonal changes and other factors. In general, this system provides an increase in the reliability of the electrochemical protection system as a whole and, accordingly, it prevents possible emergency situations on the pipeline system while also reducing the cost of pipeline maintenance due to the reliability and continuity of protection.
1. Introduction
The complete integrated automation of the electrochemical protection (EChP) system is one of the most important areas for improving the durability and reliability of the pipeline system.
Modern automated electrochemical protection systems solve the problems of monitoring protective parameters and their automatic regulation at cathodic protection stations, accumulating large amounts of data on changes in the corrosion condition of protected objects. The introduction of such systems potentially allows for a solution to problems such as: control and management of the operating modes of electrochemical protection means; control of corrosion processes in hazardous areas; providing emergency signaling in case of failures of elements and means of protection, as well as their power supply systems; and analysis of the corrosion condition of equipment and structures. At the same time, the complexity of solving these problems is complicated by the fact that the intensity of corrosion damage and the condition of the pipeline depends on a number of factors including corrosiveness, soil characteristics at the laying site, the depth of the pipeline section at the intersections with power lines and transport infrastructure facilities (sources of stray currents), the quality of the insulating coating, the efficiency of the EChP facilities, etc.
In this regard, the calculation and selection of optimal operating parameters of cathodic protection stations (values of current, voltage and protective potential) is associated with the need to implement adaptive control in real time, taking into account changes in climatic, seasonal and hydrogeological conditions, the condition of the insulating coating and other factors. At the same time, the operating parameters of cathodic protection stations located along the main pipeline at a considerable distance must be changed in concert to ensure effective protection. It should be noted that there are hardly any automated electrochemical protection systems that comprehensively solve such kinds of problems.
A significant part of research on electrochemical protection is related to the development of mathematical models for calculating and optimizing the operation parameters of electrochemical protection facilities. The authors in [1] were devoted to the study of corrosion processes in metal pipelines, and as a result, an empirical logarithmic equation was obtained for the optimal current value of the cathode station, taking into account the operating time of the pipeline system. In [2], a simulation of the distribution of the protective potential along the pipeline route was carried out using COMSOL software, and features of the regulation of the required current in various zones of cathodic protection were analyzed.
The purpose of study [3] was to identify peculiar features and to develop a simulation model to determine the magnitude of the current overlap of pipeline sections. However, the model built by the authors is not universal. It was developed in MATLAB and is tied to a specific example, the purpose of which was to show that current overlap minimizing in pipeline sections leads to an increase in energy savings. In the study by Hong et al. [4], a method for designing a cathodic protection system for insulated pipelines is proposed, taking into account environmental factors with numerical simulations for verification and optimization.
Based on the potential distribution model proposed in [5], the problem of optimizing the position of the auxiliary anode and current density is solved to create conditions under which the potential meets the requirements of cathodic protection and is evenly distributed along the pipeline.
The issues related to creating systems for monitoring the parameters of cathode stations are considered in [6,7] by the authors. The problem of modeling the propagation of the protective potential is additionally solved by the authors in [7]. Among the parameters that allow solving this problem, the characteristics of the soil in the place where the pipeline runs play a special role. The authors in [8] conducted research and obtained empirical formulas describing the relationship between the values of the protective current and the electrical conductivity of the soil.
Part of this research is aimed at automating the processes and tasks of the electrochemical protection system for main pipelines. Various telemechanical systems for monitoring and controlling the EChP facilities based on telemechanics with monitoring data transmission, mostly via GSM/GPRS cellular communication channels, are proposed. Another study [9] was devoted to the development and implementation of a SCADA-based supervisory control and data collection system for monitoring and controlling the EChP pipeline system. The main focus of the authors was studying the use of the PID-controller to control the modes of the cathode station. In the study by Joos and Buchler [10], a system for monitoring and controlling the parameters of cathode stations in real time is proposed. That study empirically confirms the fact that in many cases, for effective protection, the management of the means of EChP is implemented in such a way as to shift the protective potential towards more negative values. In [11], the authors consider an automated system for monitoring and controlling the EChP facilities based on SCADA with data transmission via GSM. The authors of [12] also proposed a system for remote monitoring of cathode stations based on GSM/GPRS; however, this was supplemented by a prediction system for determining the distribution of electric potential and current in order to assess the level of protection of underground structures from corrosion and provide a more complete interpretation of the data collected by the remote monitoring system.
It should be noted that the integrated automation of the EChP system is fully consistent with the concept of Industry 4.0, which is based on the availability of complete and reliable digital data from “smart” devices as well as new opportunities for their remote monitoring and processing, real-time control and advanced analytics [13]. Moreover, a distinctive feature of Industry 4.0 is the developed methods of big data analytics using methods and tools from artificial intelligence, machine learning, data mining and predictive analytics. A system for remote monitoring and control of EChP facilities based on IoT was proposed in [14]; however, how LoRa communication technology was used and what constitutes a web and mobile application was not disclosed, and a significant part of the article is devoted to consideration of programming features of a PLC controller for telemechanics of the EChP system.
Article [15] discusses an intelligent system for modeling and predicting the protective parameters of cathodic protection stations based on historical data obtained from cathode stations and control points and using machine learning methods (regression and classification). The paper also presents a method for estimating the potential propagation along the pipeline based on multiple linear regression coefficients. However, the paper only considers pipeline sections with one cathode station, which significantly reduces the practical usefulness of the study results.
Thus, the performed analysis has revealed several important problems:
- -
- The existing EChP systems do not solve the main problems (optimization and maintenance of protective parameters depending on the dynamics of external conditions, the state of structures, etc.). At the same time, the elimination of anodic zones (“underprotection”) at the MP due to cathodic polarization is carried out without operational consideration of environmental conditions as a rule and with a margin in terms of the protective potential, which often leads to “overprotection”. However, “overprotection” also has a very detrimental effect on the condition of the MPs protected from corrosion, namely, it increases the degree of porosity, adhesion of the insulation with its subsequent destruction, and also leads to an irreversible process, the so-called hydrogen embrittlement of the metal structures of the MPs which greatly increases the likelihood of accidents in these areas;
- -
- The basis of optimization when calculating the parameters of the means of EChP is most often the formalization of this problem in the form of a linear programming problem, where the coefficients should reflect the true influence of the current of cathodic protection stations on the value of protective potentials in the entire pipeline section under consideration while taking into account many factors and the mutual influence of neighboring stations. In this case, the main problem is precisely the determination of the coefficients of such a system of linear equations;
- -
- There are hardly any publications that discuss the principles of building corrosion monitoring systems based on modern IoT technologies and consider the modes of analytics for EChP monitoring data in web and mobile applications.
This article will be devoted to solving these problems.
2. Method for Optimizing the Parameters of Electrochemical Protection
We have developed an adaptive intelligent system for monitoring and controlling the technological process of electrochemical corrosion protection of main pipelines, which is designed for remote control of electrochemical protection parameters, their optimization and adaptive control of parameters of cathodic protection stations (CPS). In accordance with regulatory and technical documentation, the system ensures that the EChP process is maintained at an optimal level between the destructive zones of “underprotection” and “overprotection”, taking into account monitoring data, geological conditions at the pipeline laying site, climatic or seasonal changes and other factors.
This automated corrosion monitoring system is a distributed type of system, including automated workstations for the dispatcher and managers of all levels of the electrochemical protection system for main pipelines, a CPS with telemechanical control and management facilities, as well as control and measuring points (CMP). It is impossible to solve the problem of remote monitoring of protective potential in corrosion and hazardous zones or sections of main pipelines without equipping telemechanical control means for the CMP. In addition, without this information, it is impossible to solve the problem of optimal control of the CPS.
The basis for optimizing the protective parameters of the CPS is the method of successive improvement of the plan (simplex method) to minimize the objective function.
where is the absolute value of the protection current of the k-th cathode station (k = 1,2, …, m).
The protective potential for all drainage points of the CPS should not be less (in modulus) than the minimum protective potential .
In order to fulfill this constraint, we use a system of linear equations:
where is “pipe-to-soil” potential difference without the EChP or pipeline metal corrosion potential at the i-th drainage point of CPS (i = 1,2, …, m), and is the input impedances on the “close ground” for the i-th node, provided that the only current load is located in the k-th node.
Let us denote that is an offset of the protective potential at the i-th drainage point of the CPS, caused by the k-th cathode station at .
In addition, the induced protective potential everywhere must be no more (in absolute value) than the given . Thus, the restrictions assume the following form:
In turn, the magnitude of the current of the CPS should not exceed a certain limit value , for example, it must not exceed the rated current of the most powerful cathode converter. This limitation is determined during the design of the electrochemical protection system or upon the properties of the cathode converters used.
This leads to a system of m type constraints.
where is the rated protection current of the k-th CPS.
The other combinations of restrictions are also possible. However, it is important that all equations of the system are linearly independent, that is, none of them should be obtained as a linear combination of others. In addition, the system must be compatible, that is, among the equations there should not be erratics.
These systems of equations then form a set of initial data sufficient for optimization by the simplex method. However, this system of equations, taking into account the protection condition of the pipeline in the middle of the sections between the cathode stations at the installation sites of remote instrumentation, will naturally change.
Suppose we have j = 1,2, …, r CMPs with remote monitoring of the protection potential. Thus, for each CMP location, the following constraint equations can be written, which are added to (3):
where the coefficients reflect the influence of the k-th cathode station of the pipeline section for protective parameters at the CMP installation point j.
where is characteristic resistance taking into account the current load k-th cathode station (j = 1,2, …, r; k = 1,2, …, m); is damp coefficient (exponential damping is used to distribute the potential difference along the pipe); and is the protection arm of the k-th cathode station. Determining the coefficients of equations based on monitoring data is a rather difficult task. It should be taken into account that there are right and left arms of influence at each considered point of the CPS installation.
The current k-th cathode station damp coefficient values ( (left arm) and (right arm) for the k-th CPS) are determined in the system setup mode (by turning off the stations to the left and right related to the considered point) and, at the same time, obtain protective potential monitoring data.
Failures should be avoided when optimizing at points that are not necessarily located strictly in the middle between neighboring cathodic protection stations, and, accordingly, have different , and other conditions (for example, soil parameters, since soil resistance has a key influence on the nature of potential propagation and current density). All this makes it possible to calculate the mutual influence of cathodic protection stations, to determine the values of all coefficients of the equations and proceed to solving the optimization problem.
The main problem is the determination of some characteristic resistance of (i = 1, …, m) and (j = 1, …, r), and therefore the coefficients of the system of linear equations.
In practice, at first, commands are issued at the CPS according to the settings that are obtained by modeling or by calculation (in a given way). After receiving monitoring data in the interrupt mode (during system adjustment), a matrix (t = m + r) of the influence of the k-th CPS on the potential at the t-th point of the pipeline is formed. The damping constants of a “pipe-to-ground” potential are then determined for each CPS. In this case, it is necessary to determine all (left arm) and (right arm) values for the k-th CPS.
Subsequently, the linear programming problem with the objective function is solved (1). Thus, the plan for the distribution of protection currents between the CPSs on the optimized section of the MP is improved.
Actually, the work of an adaptive system is much more complex, since there are many different tasks that it has to solve.
For example, if one, or several, of the CPSs are excluded from the EChP system for various reasons, such as a power outage, about which a message is received, a converter failure or a break in the load circuit (a message is received), then it is necessary to consider a new model of EChP system for this area. In the matrices, instead of CPS data, the data of CMPs are substituted. Comparing the data of the present (last) monitoring and the optimization results, it is necessary to form control actions either by current or by potential on neighboring CPSs. It should be noted that, with the exclusion of the CPS, the development of potential settings by the neighboring CPS can lead to an imbalance in the optimal plan. In fact, a rational plan close to optimal will be obtained. Therefore, these must be controlled by an intelligent system and adaptation of the plan to various changes is required in order to bring the system to a steady state.
Based on the results of the solution, it is possible to construct a new graph of potential distribution along the pipeline. The plan should improve the current state of EChP. For example, “overprotection” occurs in the “rainy” condition and, in the “very dry” condition, “underprotection” is possible in the middle sections of the pipeline between the CPSs. The same EChP condition can occur in stray current zones. For example, they are recorded during measurements on the CMP located in these zones. In practice, this allows you to adjust the optimal or more rational plan under the given operating conditions using an adaptive intelligent system for monitoring and controlling the parameters of electrochemical corrosion protection of pipelines.
3. An Adaptive Intelligent Monitoring and Control System for Electrochemical Protection of Pipelines
Our system involves the use of a CPS with inverter-type cathodic converters, a control and measuring point with telemetry equipment supporting modern industrial IoT class communication technologies and special software developed on the basis of intelligent information technologies.
In addition to the GSM communication networks often used in the EChP systems, our system also uses an energy-efficient long-range data transmission network LPWAN, which has the following advantages: simple “star” architecture without repeaters, transmission at a frequency not requiring licensing, low power consumption and long communication range, high degree of data protection. LPWAN is a relatively new radio communication approach applied to devices and large distributed wireless telemetry networks. The principle of data transmission using LPWAN technology at the physical level is based on the property of radio systems, i.e., an increase in energy, and hence communication range, with a decrease in transmission rate. Transmission occurs at a frequency of 868.8 MHz (no licensing required) at a power of up to 25 mW. Free use of radio transmitting devices is allowed on this frequency range. The transmitted data is encrypted with AES-128 and XTEA-256 algorithms, which provides a high degree of data protection.
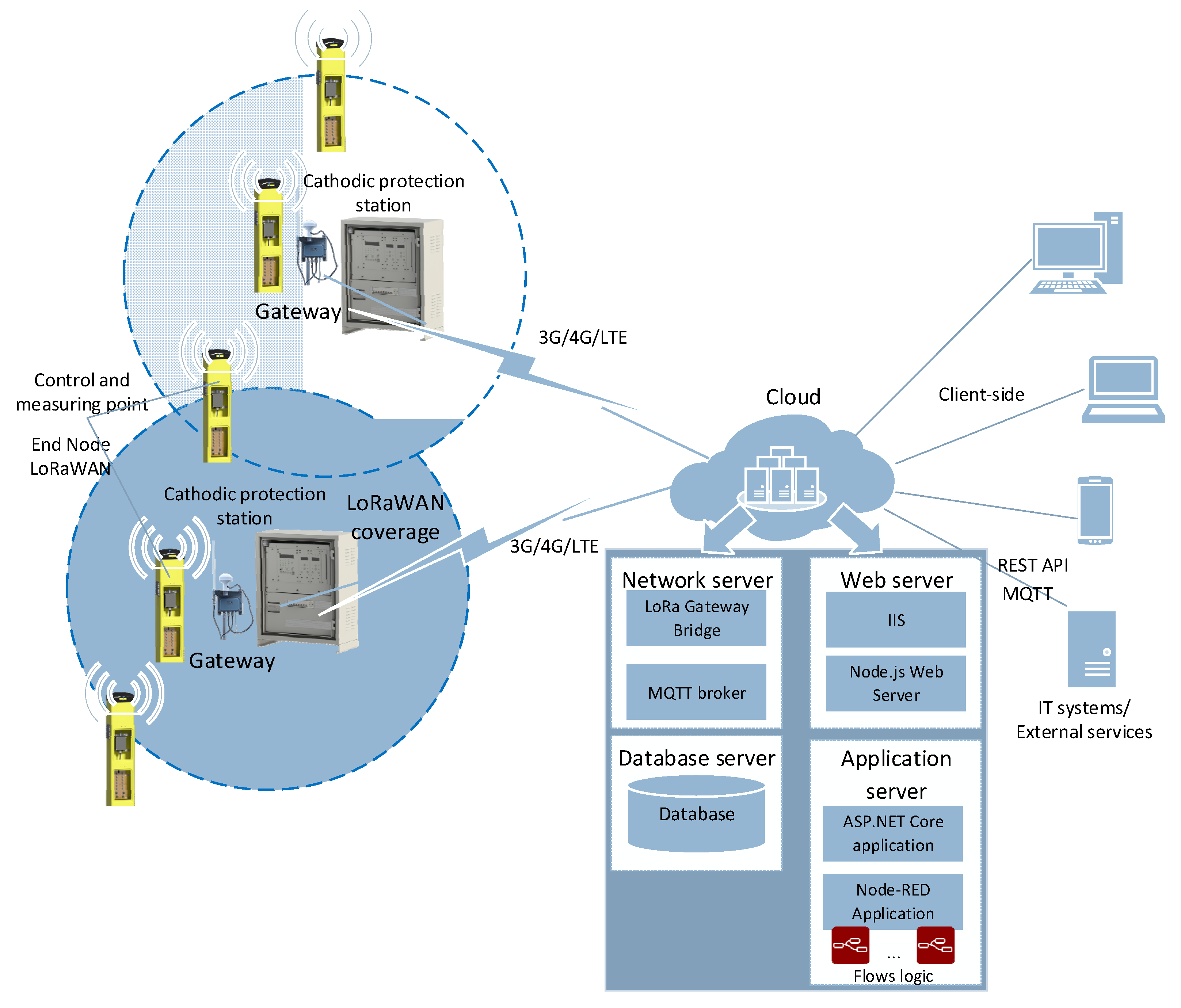
The nodes of this network are characterized by low power consumption (up to 10 years of battery life, which is especially important for the control and measuring points), long communication range (15 km in rural areas and 5 km in dense urban areas) and low cost terminal equipment. Due to the data transmission range and protocol features, one LPWAN gateway can directly serve hundreds of thousands of sensors with one radio point. This reduces the overall cost of the equipment and the work involved in installing and configuring it. However, it should be remembered that, in real conditions, communication range depends on the terrain and infrastructure development. Another advantage is that when the zones of gateways overlap, data transmission from terminal devices can occur on any of them, which increases reliability and the assurance of transmission (Figure 1).

Figure 1.
The structure of the distributed EChP system and the server software for the adaptive intelligent control and management system of EChP.
This makes it possible to control protective potential due to remote monitoring of the control and measuring points in the middle of the pipeline between adjacent CPSs, as well as in all corrosion and hazardous areas where control and measuring points are also installed. This gives a more complete picture of pipeline security and allows the problem of optimizing the EChP system to be solved.
The LPWAN gateway is designed to organize an LPWAN radio communication network and uses patented broadband LoRa modulation which provides increases in communication line budget and noise immunity. The gateway transmits encrypted data over a GPRS/3G/4G/LTE channel from terminal devices (CMP) to the IoT cloud platform and further to the application server. The LoRaWAN gateway is located on the CPS where data packets arrive from the CMP.
The server part of the system is a set of server programs that is responsible for collecting information from devices, storing this information in a database and servicing the client software of the system. The server part works continuously, providing continuous collection and storage of data. The client part of the system includes client workstations for data processing and analysis, as well as the ability to work through a web application from any device, requiring only a browser at its disposal.
The server part of the system (Figure 1) includes a communication server, an EChP database server, an application server and a web server. The communication server is designed to receive data from the EChP and transfer configuration commands and control commands back. Cellular communication channels, GSM/GPRS, as well as TCP and UDP protocols are supported when transmitting data via LoRaWAN. The EChP database server is designed to collect and store monitoring data obtained by technical means of diagnostics and remote control, information on measurements and surveys for analysis and assessment of the condition of protection of pipeline objects from corrosion. The web server is designed to use the system to analyze and assess the condition of protection from corrosion for pipeline objects using an Internet browser, providing simultaneous access to information visualized in the web interface and system functions in accordance with user roles. The application server is designed to execute the business logic of the system, process user requests and external events of the system modules and fetch and provide data to remote clients.
In order to develop the main part of the application, the MS Visual Studio tool environment and ASP.NET Core technology were used. The separate server modules of the platform are developed and deployed on Node.js. As a programming tool for connecting end IoT devices, APIs and cognitive services of the developed platform, Node-RED is used—a visual browser-based JavaScript runtime development environment for IoT. Node-RED allows for the deployment of processes with one click in a cloud environment; once the processes are created and deployed, they can be run and debugged without shutting down and rebooting the entire system.
In the basic configuration, the communication server, web server, and application server are physically combined.
We next consider the functionality of the system. The system provides automation of the tasks related to the electrochemical corrosion protection of objects of pipeline systems. At the same time, the exchange of information between users of different levels is carried out via Internet channels through a single web interface using authorization tools and access rights.
The system provides remote monitoring of the protective parameters of cathodic protection stations, corrosion monitoring units installed at control and measuring points and other EChP facilities in accordance with the survey organization specified. At the same time, collection, processing, storage in a database and display of the results of monitoring of the EChP facilities, survey data for analysis and assessment of the condition of corrosion protection of the MP objects is carried out.
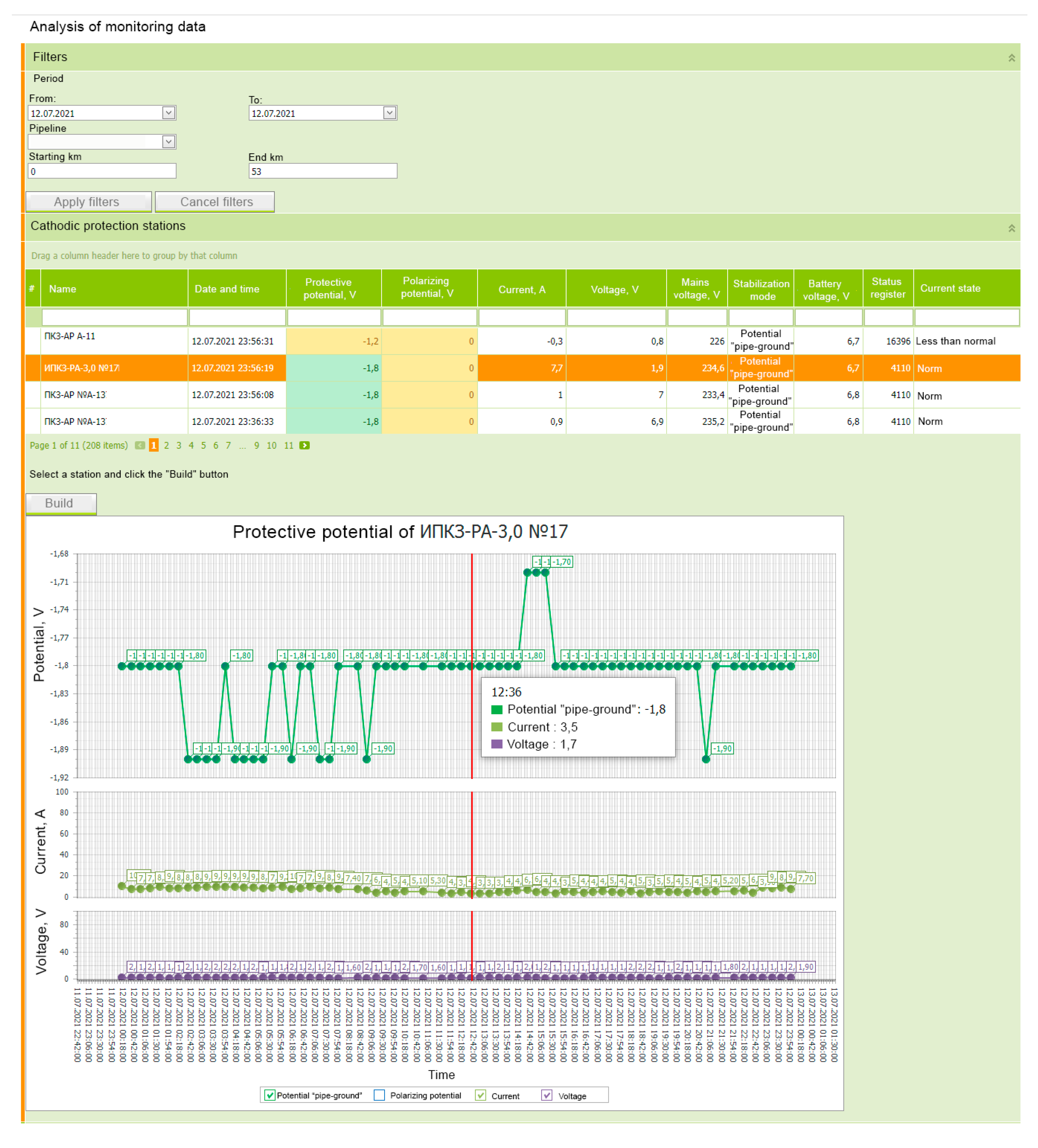
The system provides flexible tools for analytical interactive data processing, comparative and retrospective analysis for tasks related to evaluating the protection of pipeline system objects from corrosion. The system in the web interface generates an interactive analytical report containing tabular and graphical information about the protective parameters with the ability to perform sorting, filtering and grouping. In Figure 2, a web interface with monitoring data for the CPS is shown.

Figure 2.
Web interface with the CPS monitoring data.
The system makes it possible to view monitoring data for any section of the protected object and in any time slice. With the help of text and color indication, the state of security is displayed according to monitoring data, taking into account the adjustable range of controlled parameters (overprotection, more than normal, normal, less than normal, underprotection). The system also provides the ability to remotely control the parameters of the electrochemical protection for the cathodic protection station and configure its operating modes (modes of stabilization by current, voltage and total potential are supported).
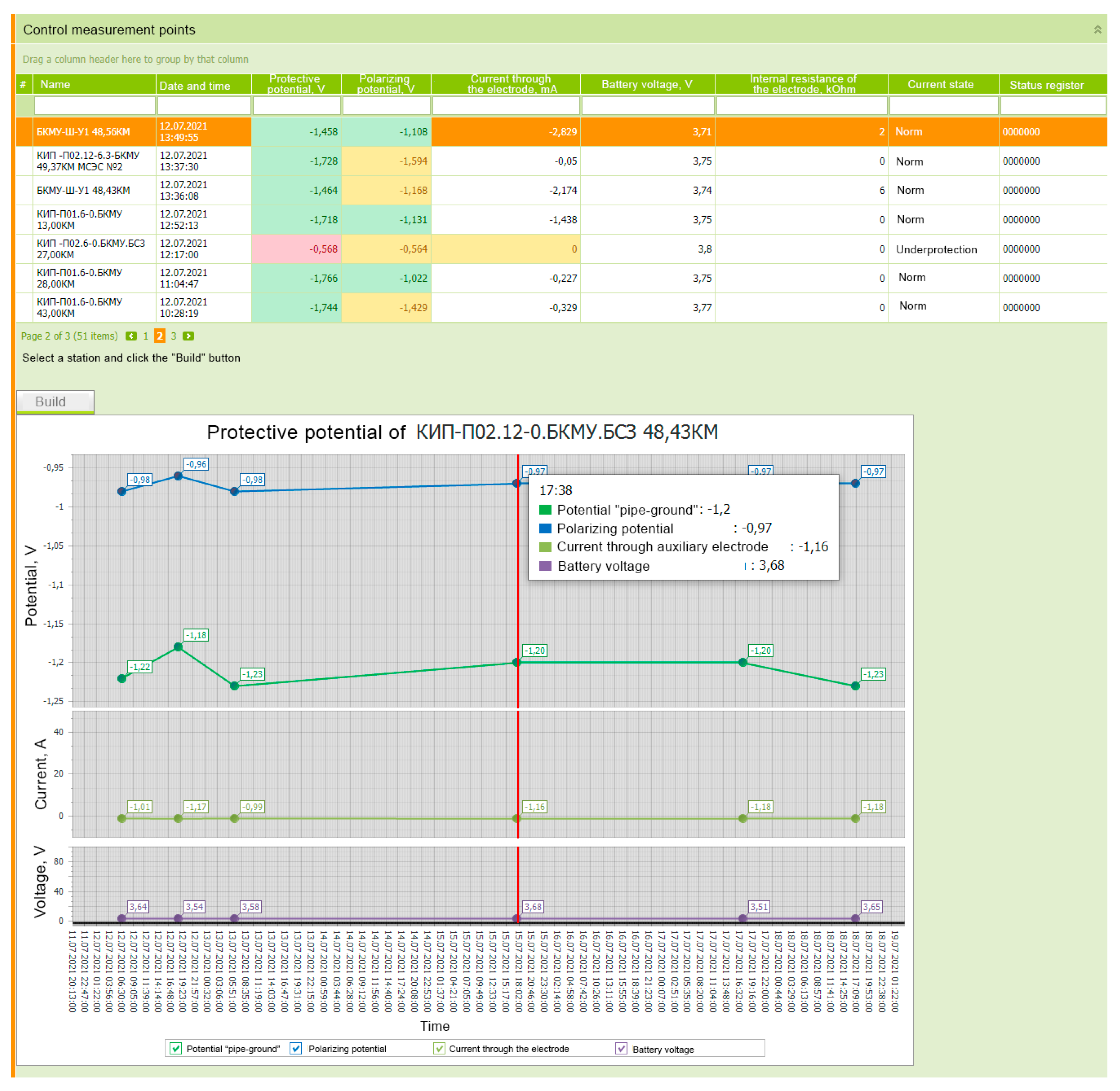
Similarly, work with an interactive report for the CMP (Figure 3) is carried out. In monitoring data for the CMP, parameters such as the current through the auxiliary reference electrode and the internal resistance of the reference electrode play a special role. They can be used to evaluate the state of the copper sulfate reference electrode. In addition, there is an option, in the monitoring parameters for the CMP, to monitor battery voltage in order to make a timely decision to replace the battery.

Figure 3.
Web interface with monitoring data of the CMP.
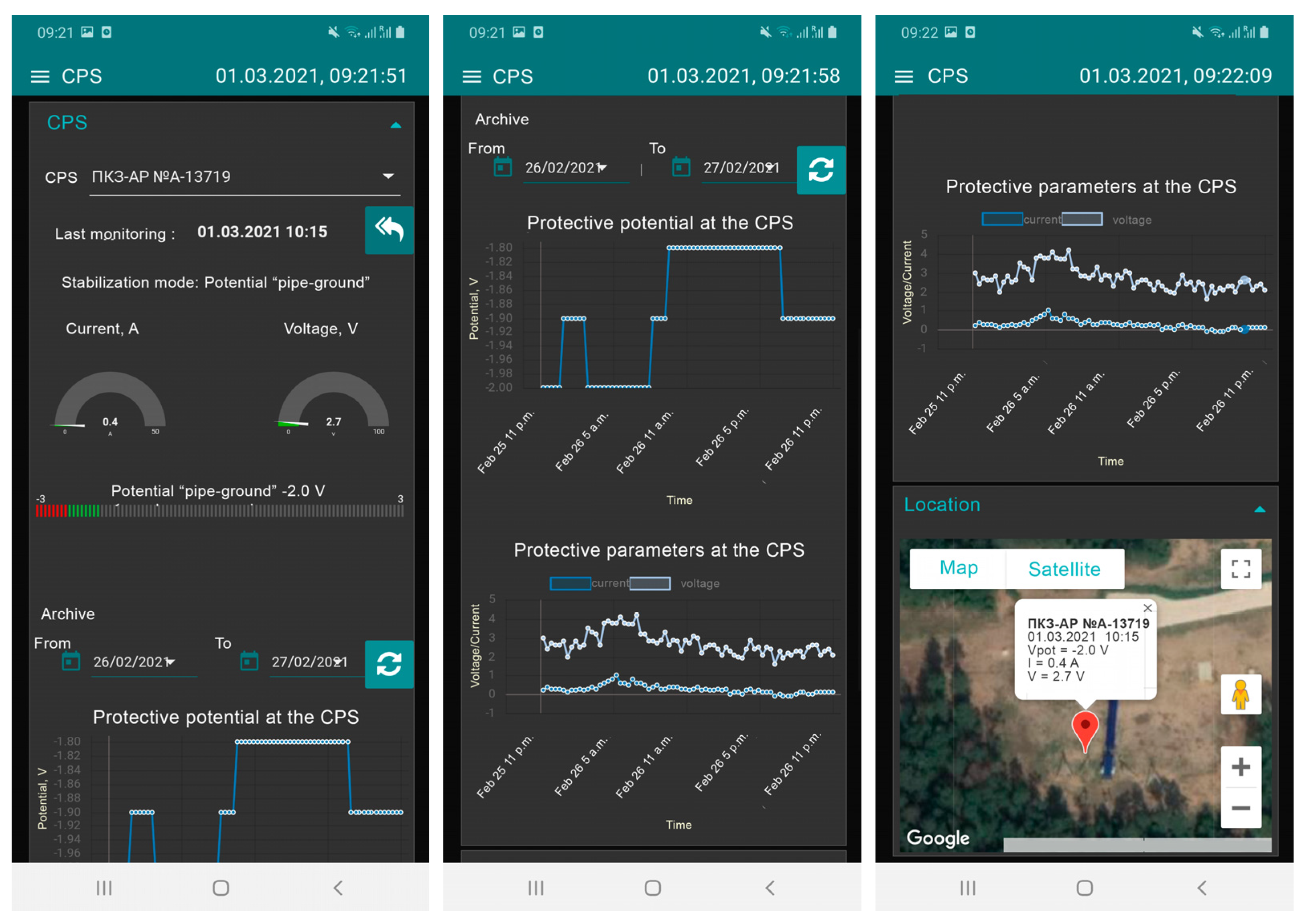
In addition to the web interface for workstations, the system provides an interface for mobile devices. When the system boots up, a dashboard is displayed on the mobile device with the main monitoring data and the condition of the EChP system (Figure 4). The operational information is presented on this interface and various color indications are used. The voice guidance and control modes are also implemented. By selecting the voice guidance mode, the system will acquaint the user, in natural language, with the main state of the EChP system and the protected object. In the voice command mode, the system recognizes commands and performs appropriate actions to input such as “Is monitoring data at the twentieth kilometer?”, “What is the protective potential at station number twelve?”, “Issue a current control command to station twelve with a setting of two amperes” and others.

Figure 4.
Dashboard with monitoring data on a mobile interface.
The detailed information for any EChP tool can be also viewed (Figure 5).

Figure 5.
Dashboard with monitoring data on a mobile interface.
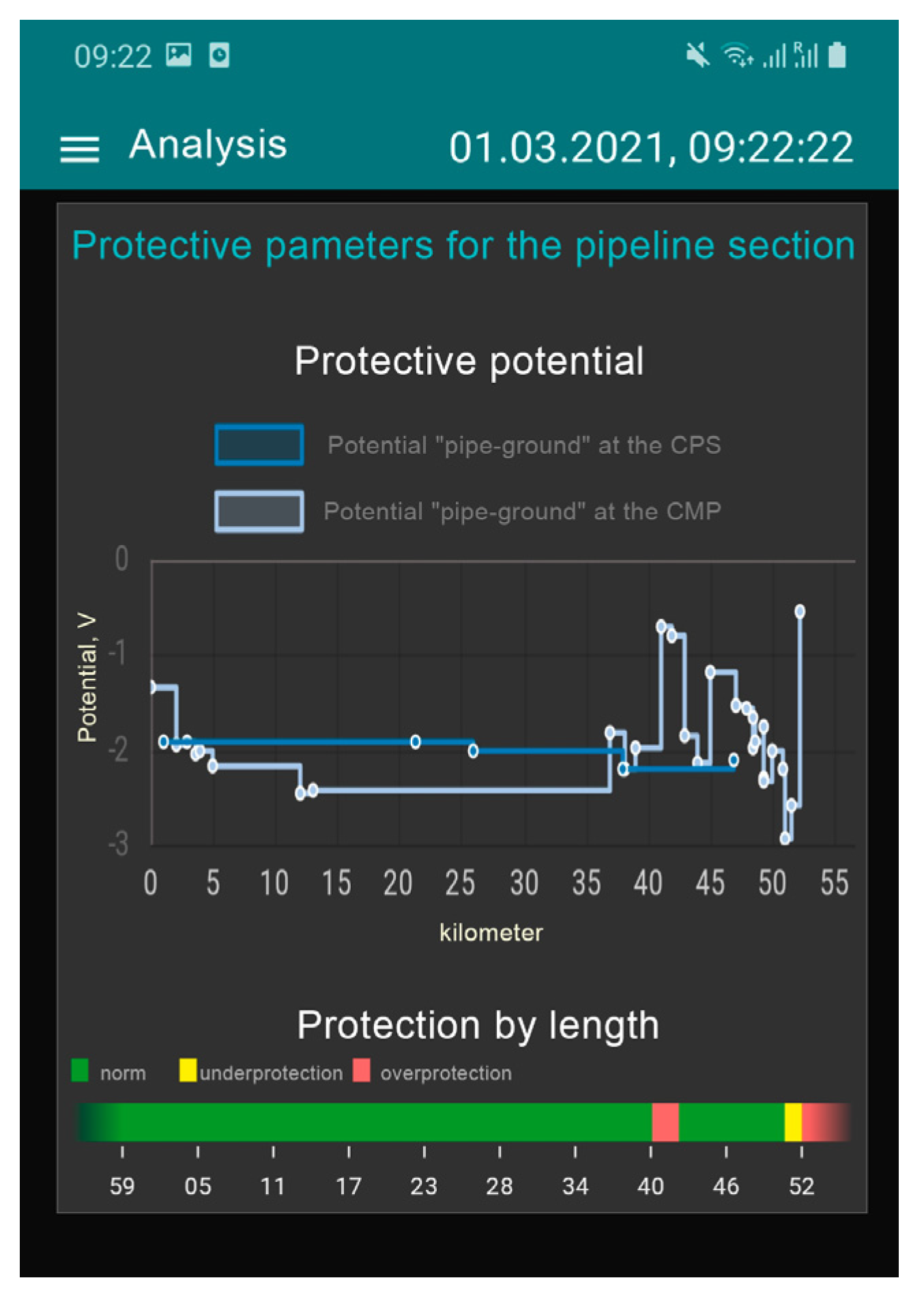
The system provides the ability to use a cartographic service to display the spatial location of objects, the EChP system and related factual information on the map. Access to all this data from a mobile phone makes the system very convenient for the EChP engineers who travel to sites. As well as on the web interface for desktop computers and mobile devices, the system provides the possibility of analytical interactive data processing, comparative and retrospective analysis for tasks related to assessing the protection of pipeline system objects against corrosion (Figure 6).

Figure 6.
Dashboard with monitoring data on a mobile interface.
In the security analysis mode, the interactive analytical report presents the following graphs: situational plan, analysis of corrosive aggressiveness of the soil and hazards along the pipeline route, graph of the state of protection of the pipeline, and graph of protection along the length. Power lines, road and railway crossings and other objects for the considered section of the pipeline are displayed on the situational plan of the pipeline, as well as the location of the CPS and CMP. Viewing information about the types of insulation, soil, stray currents, salts and bacteria for a particular section of the pipeline by kilometers allows for assessment of the technogenic situation along the pipeline route. The histogram of the state of pipeline protection is built on the basis of the results of the CPS and the CMP monitoring.
The current state of protection is determined by the value of total potential: underprotection, less than the norm, norm, more than the norm, and overprotection. The schedule also takes into account the shutdown of the CPS. In addition to the indicated functions, the system also provides such features as:
- -
- Notification via various channels in case of emergency changes in parameters, changes to the state of electrochemical protection means or unauthorized access;
- -
- Preparation and generation of regulated, analytical, summary and statistical reports based on system data;
- -
- Management of user access rights to data and functions of the system, system settings and logging of work in the system.
4. Results
However, the main mode of system operation is to optimize the protective parameters of cathodic protection stations, taking into account monitoring data, geological conditions at the pipeline site and climatic or seasonal changes, as well as issuing recommendations and automatic commands to control the modes of cathodic protection stations in real time.
The intelligent system, which is part of our complex, has a knowledge base and implements a logical conclusion for solving various decision-making problems for diagnosing and monitoring pipeline corrosion, monitoring and generating control commands for the EChP facilities, determining the ranges of protective potential values, and other decision-making issues. For each of the tasks, appropriate knowledge models have been developed that reflect patterns, regulatory frameworks and experience in solving these problems. This includes knowing that the oriented model for finding the required protective total potential contains logical rules that take into account the presence of water-soluble salts and bacteria in the pipeline laying area, the presence of stray currents, etc.
In a routine mode, the CPS carries out stabilization according to the protective potential itself. Therefore, the automatic stabilization mode on the part of the system is activated when either the station (or stations) is in the current stabilization mode (accordingly, the system controls the output of the total potential beyond the boundaries) or for some reason the station cannot stabilize the potential, or when it is turned off (power units) or powered off.
When a potential exit situation is detected at one or more stations, the neighboring stations of the right and left arms are controlled. In this case, the system controls either the change in the total potential setting or the station current setting (depending on its current mode).
The formation of the control setting in automatic mode by the system is accompanied by a notification on the screen and the corresponding command is recorded in the command archive of the database indicating that the command was initiated by the system.
Thus, the system solves the problem of automatic control of all CPSs simultaneously in order to maintain the necessary protective parameters throughout the site.
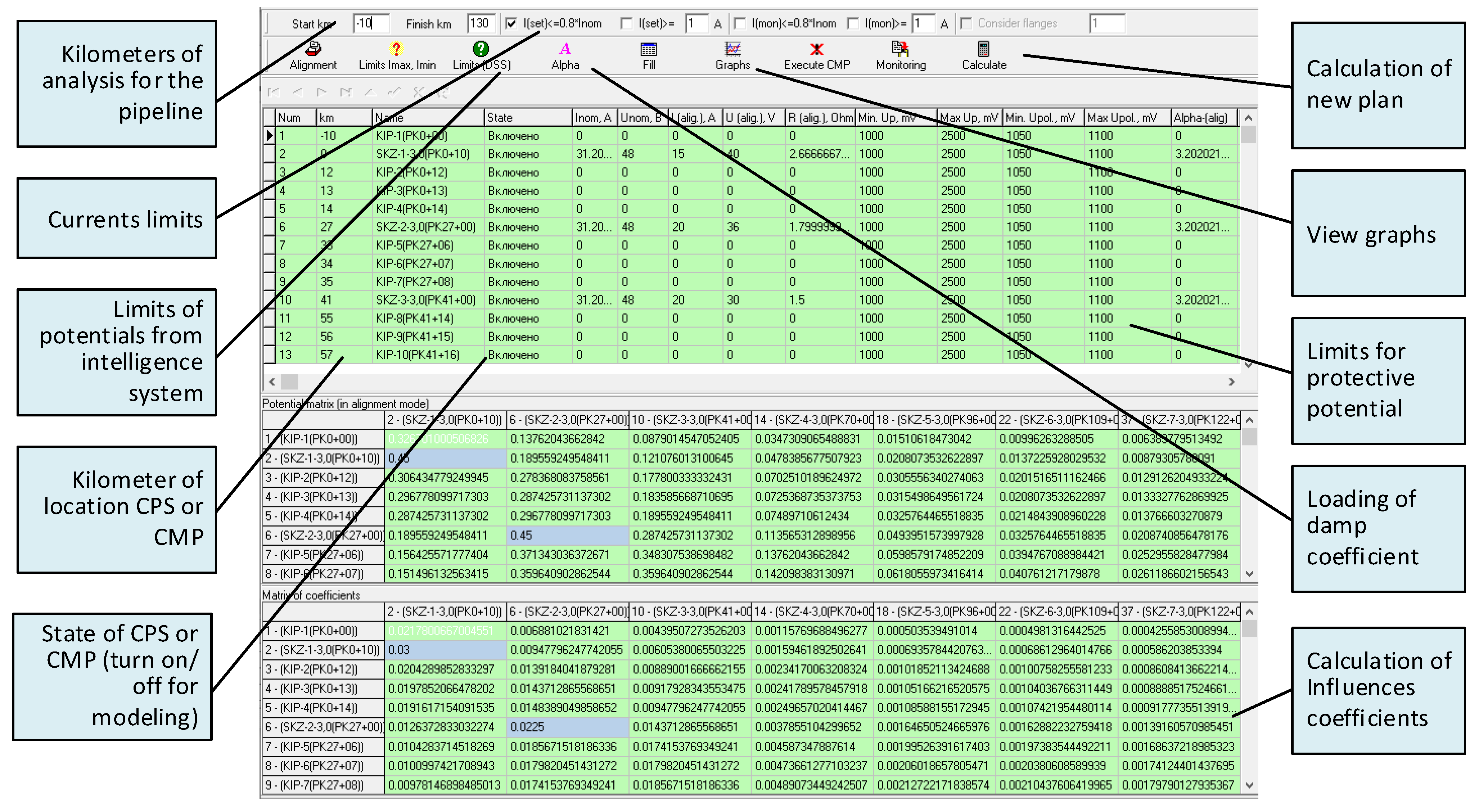
The adaptive system for optimizing the operating modes of the CPS is multicriteria, since the optimization is carried out according to both the criterion of optimal distribution of the protective potential (uniform distribution of the protective total potential along the length of the pipeline) and to the criterion of the minimum total protective current of all CPSs in a given section of the main pipelines of each automation module. Figure 7 shows the main screen of the system.

Figure 7.
The main window of the adaptive intelligent system for monitoring and managing the protective parameters of the CPS.
It should be noted that a more important criterion is the distribution of protective potential along the length. If necessary, it is possible to fix a certain value of the protective current of any CPS (if the current of the selected CPS is undesirable, or in principle impossible to change). The solution of the optimization problem is based on the use of the linear programming method. The objective function is to minimize the sum of protective currents of all CPSs in a given optimization area.
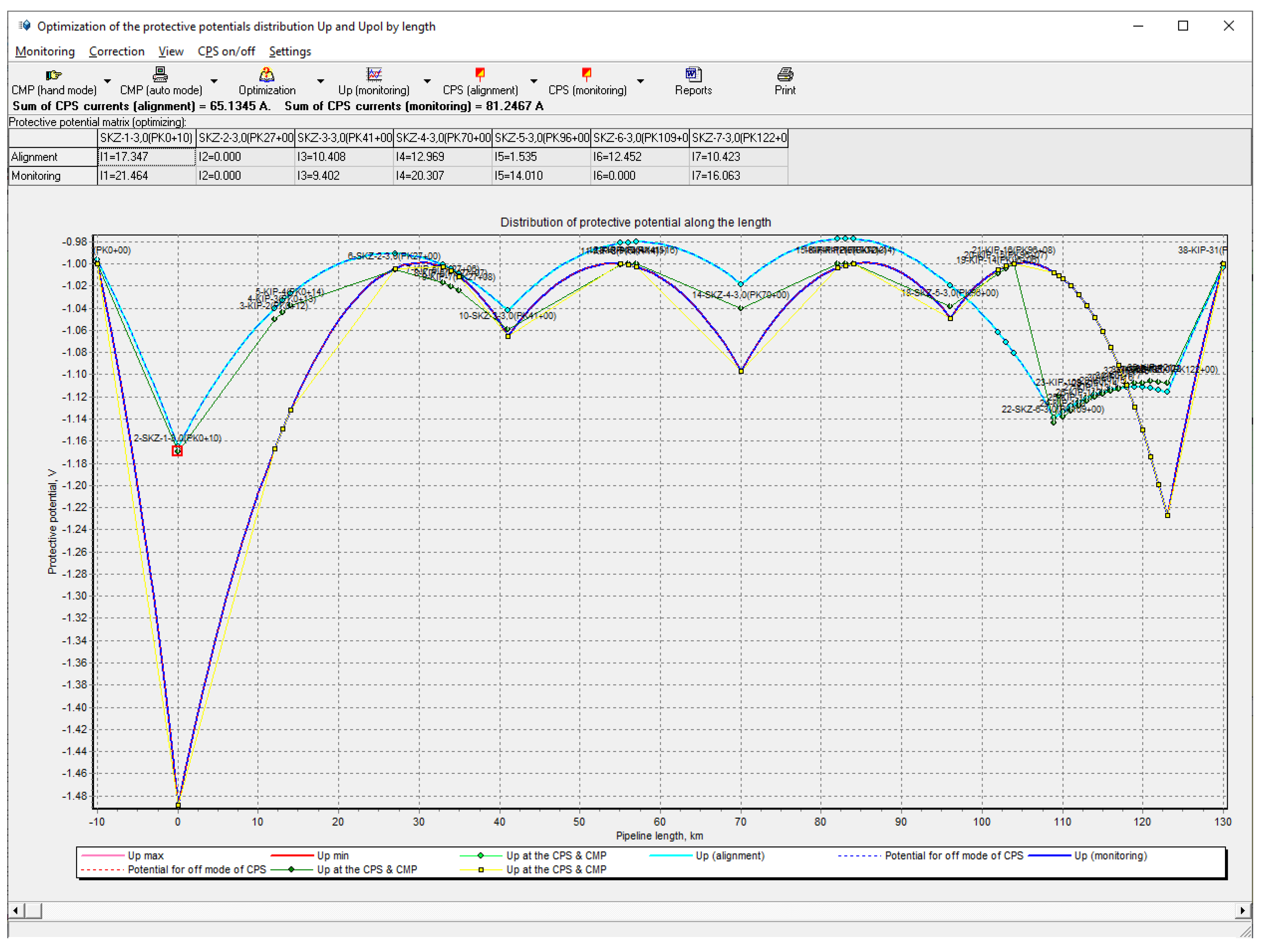
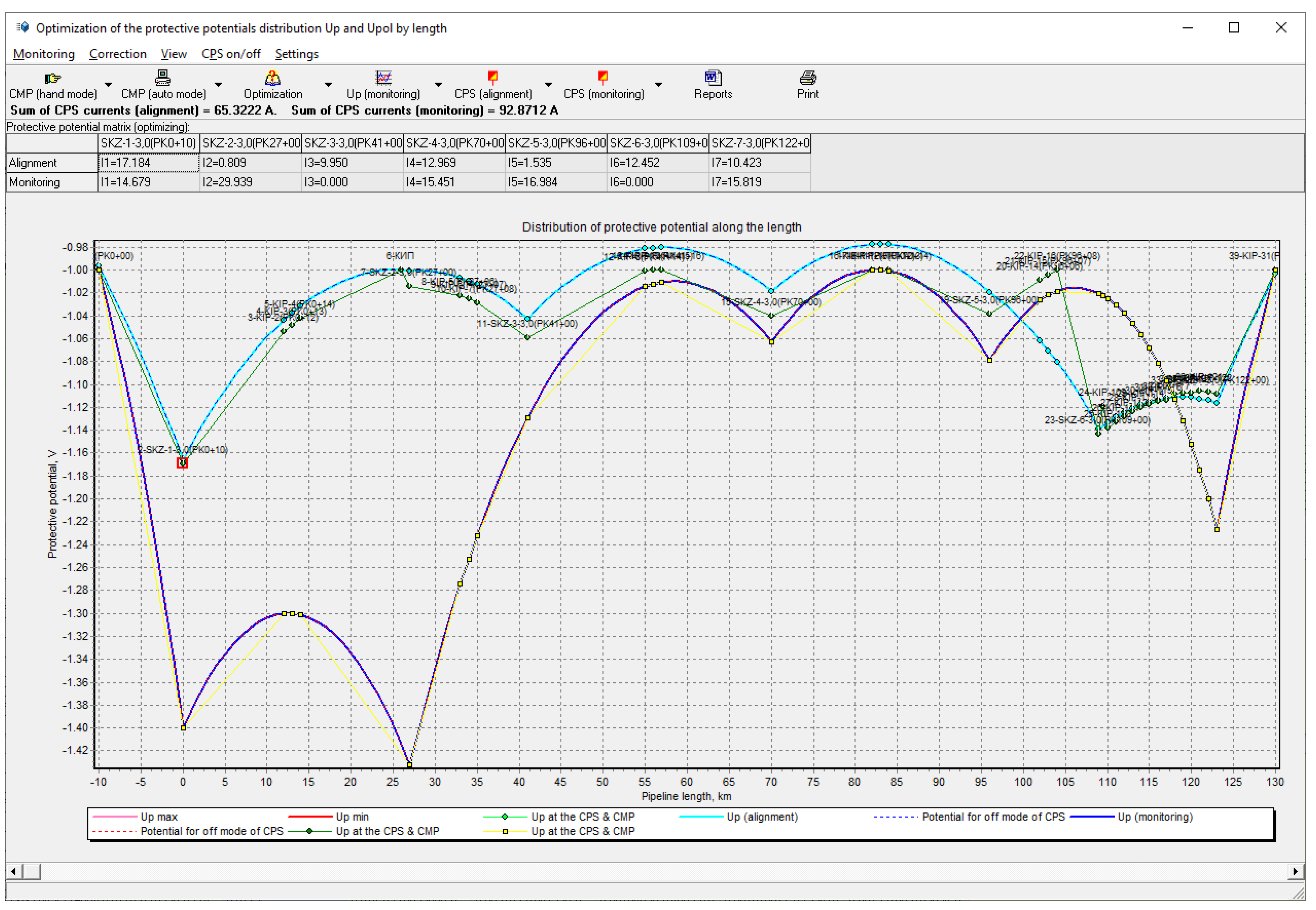
Figure 8 shows the results of modeling and optimization of the protective parameters of the CPS (the first iteration of optimization is the minimization of the total current of all CPSs) on the Akshabulak-Kyzylorda main gas pipeline (0–122.9 km) of the Republic of Kazakhstan. Figure 9 shows the results of modeling and optimization of the protective parameters of the CPS (the second iteration of optimization—we are trying to remove reserves by the value of the protective potential).

Figure 8.
Plan for the intermediate distribution of the total potential along the section under consideration while minimizing the total current of all CPSs.

Figure 9.
A new plan for the distribution of the total potential along the area under consideration, with correction from above according to Up min and from below Up max.
When diagnosing a situation of “underprotection” or “overprotection” at the installation sites of CPSs or CMPs, the monitoring results are analyzed, and the adaptive system tries to solve the optimization problem and build a new plan. The sequence of formation of a new plan is as follows. The matrix of potentials is calculated based on the current monitoring data. Further, taking into account the coefficients of influence, the current propagation coefficients of the left and right arms of the protection are calculated. After that, the linear programming problem is solved, and a new graph of the potential distribution along the pipeline based on the results of the solution is constructed, which should improve the current state of the EChP. The received protective current settings are sent to the CPS. It should be noted that optimization can result in current values of 0 for individual CPSs. This indicates that the CPS data are redundant at the given potential limits. However, the adaptive system allows a limit to be set that excludes the complete shutdown of stations. It allows a slight offload to a neighboring CPS. The value of the objective function for current will then even increase somewhat (this can be within milliamps and units of amperes) and, at the same time, all CPSs will be included in the plan (we are observing this situation in Figure 9).
Similarly, the plan is corrected when it deviates from the optimal plan when the CPS is turned off (during a power outage or failure of the CPS, or other reasons), which requires compensation for the resulting failure in protection of the pipeline.
During operation, when external conditions change (precipitation, temperature, etc.), which primarily affects the resistivity of the soil and leads to a change in the transition resistance of the insulation, the constant propagation of the protection current along the pipeline also changes. In this case, the system also makes the necessary correction to the plan for the distribution of the total potential along the area under consideration.
5. Discussion
The CPS usually independently works out the stabilization of protection parameters in automatic mode with minor changes, i.e., deviations from the given settings. However, in the case of a significant mismatch or a situation being diagnosed as “underprotection” or “overprotection”, the monitoring results are analyzed and the optimization problem is solved. Indeed, during operation, when external conditions change (precipitation, temperature, etc.), which primarily affects the resistivity of the soil, the transition resistance of the insulation changes. This leads to a change in the propagation constant of the protection current along the pipeline. It should be taken into account that, depending on external conditions, the current propagation constant along the pipeline also changes its value.
Thus, one of the main modes of functioning for the proposed system is the mode of estimating the state of EChP objects in the pipeline system and the formation of control commands for the CPS. For this, an intelligent decision support system is used. The intelligent system allows for real time analysis and diagnostics in the presence of a significant number of significant factors that change dynamically. The intelligent system is also used to support decision making on pipeline corrosion diagnostics and monitoring, monitoring and generating control commands for the EChP facilities, the determination of ranges of protective potential values and other tasks. For each of the tasks, appropriate knowledge models have been developed that reflect patterns, regulatory frameworks and experience in solving these problems.
Thus, the proposed system maintains the EChP process at an optimal level between the “underprotection” and “overprotection” zones and thereby reduces the harmful effects caused by modern EChP systems. As the estimates show, this extends the technical life of the pipeline by at least 5–10 years and reduces the accident rate due to corrosion.
The system constantly controls and ensures the technological EChP process both in time and in length, controlling the protective potential due to remote monitoring of the CMP in the middle of the pipeline between adjacent CPSs, as well as in all corrosion and hazardous zones where the CMP is also installed. This gives a more complete picture of the protection of the pipeline and allows the problem of optimizing the EChP to be solved and, consequently, increases the actual protection of the pipeline from corrosion by about 20–30%.
The system implements an integrated approach to automating the tasks of the EChP system (monitoring, optimization, regulation of protective parameters, their analysis, security assessment, generation of reports, recommendations, etc.), which provides a significant increase in its efficiency by 30%–40% depending on its actual condition. This also ensures the extension of the technical life of the pipeline system.
The system implements not only information support for the EChP process, but also intellectual support through the use of information intelligent technologies and, in particular, the use of an intelligent decision support system at all automated workplaces, both in automatic mode and in automated mode in the form of a question–answer system for the EChP specialists.
Author Contributions
Conceptualization, O.P. and V.P.; formal analysis, O.P., V.P., Z.K., B.K. and D.T.; methodology, V.P. and A.K.; software, O.P.; writing—original draft preparation, O.P., V.P., Z.K. and B.K.; writing—review and editing, O.P., V.P., Z.K. and D.T.; supervision, O.P., V.P. and D.T. All authors have read and agreed to the published version of the manuscript.
Funding
The results of a study conducted within the framework of the grant project of the Ministry of Education and Science of the Republic of Kazakhstan AP09261098 on the topic “Development of an information and analytical system for monitoring and controlling electrochemical protection against corrosion of main pipelines” are presented.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chung, N.-T.; Hong, M.-S.; Kim, J.-G. Optimizing the Required Cathodic Protection Current for Pre-Buried Pipelines Using Electrochemical Acceleration Methods. Materials 2021, 14, 579. [Google Scholar] [CrossRef] [PubMed]
- Zeng, W.; Xu, D.; Wang, H.; Yang, Y.; Wang, H. Optimization for the cathodic protection system based on numerical simulation. E3S Web Conf. 2020, 185, 02038. [Google Scholar] [CrossRef]
- Kurien, C.; Srivastava, A.K. Investigation on Power Aspects in Impressed Current Cathodic Protection System. 2017. Available online: https://www.jcse.org/viewPaper/ID/1222/ZhD7HMmfPt6RQkJyOpN2ogEsaF1emP (accessed on 1 June 2022).
- Hong, M.-S.; So, Y.-S.; Kim, J.-G. Optimization of Cathodic Protection Design for Pre-Insulated Pipeline in District Heating System Using Computational Simulation. Materials 2019, 12, 1761. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meng, N.; Lin, L.; Jun, N. Research on Optimization of Cathodic Protection System for Long Distance Pipeline Based on Numerical Simulation. In Proceedings of the 2018 3rd Joint International Information Technology, Mechanical and Electronic Engineering Conference, Chongqing, China, 15–16 December 2018; pp. 324–328. [Google Scholar] [CrossRef] [Green Version]
- Summers, N. Remote Monitoring of Pipeline Cathodic Protection Systems. PetroMin PipeLiner. 2009. Available online: https://www.abriox.com/wp-content/documents/whitepapers-pp-2009.pdf (accessed on 1 June 2022).
- Purcar, M.; Bortels, L. Design and optimization of pipeline cathodic protection systems. Fasc. De Energetică 2009, 15, 289–294. [Google Scholar]
- Al-Hazzaa, M.; Al-Abdullatif, M. Effect of Soil Conductivity on the Design of Cathodic Protection Systems Used in the Prevention of Pipeline Corrosion. J. King Saud Univ.-Eng. Sci. 2010, 22, 111–116. [Google Scholar] [CrossRef]
- Harbi, J.A.; Al-Najjar, F.I.H.; Sabri, L.A. Monitoring and Control on Impressed Current CathodicProtection for Oil Pipelines. Al-Nahrain J. Eng. Sci. 2017, 20, 807–814. [Google Scholar]
- Joos, D.; Büchler, M. Real Time Remote Monitoring and Control of the Cathodic Protection for Mitigation of Interference. 2016. Available online: https://ceocor.lu/download/2016_slovenia/2016-JOOS-BUECHLER-Real-time-remote-monitoring-and-control-of-the-cathodic-protection-for-mitigation-of-interference.pdf (accessed on 1 June 2022).
- Irannejad, M.; Iraninejad, M. Remote Monitoring of Oil Pipelines Cathodic Protection System via GSM and Its Application to SCADA System. Int. J. Sci. Res. 2014, 3, 1619–1622. [Google Scholar]
- Peratta, A.; Baynham, J.; Adey, R.; Pimenta, G. Intelligent Remote Monitoring System for Cathodic Protection of Transmission Pipelines. 2009. Available online: https://www.researchgate.net/publication/254547171_Intelligent_remote_monitoring_system_for_cathodic_protection_of_transmission_pipelines/citations (accessed on 1 June 2022).
- Prokhorov, O.; Pronchakov, Y.; Prokhorov, V. Cloud IoT Platform for Creating Intelligent Industrial Automation Systems. Lect. Notes Netw. Syst. 2021, 188, 55–67. [Google Scholar]
- Zhao, L.; Wang, G.; Liu, G. Remote Monitoring and Control System of Potentiostat Based on the Internet of Things. J. Inf. Commun. Converg. Eng. 2020, 14, 123–128. [Google Scholar]
- Rossouw, E.; Doorsamy, W. Predictive Maintenance Framework for Cathodic Protection Systems Using Data Analytics. Energies 2021, 14, 5805. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).