2.1. Disadvantages of Conventional Cascade DC Drive Control System
The conventional cascade DC drive control system is shown in
Figure 1.
Here,
is the torque constant;
is the magnetic flux;
is the armature current;
is the rotor speed;
is the control action signal (output of the speed controller) and a setpoint value for the armature current loop
;
is the load torque; and
is the motor electrodynamic torque.
is a transfer function of the drive mechanics
,
is a transfer function of the armature winding,
is an armature current control error,
is a back electromotive force (back-EMF),
is an armature current controller,
is a speed controller,
is the armature current controller output
,
is a thyristor converter transfer function, and
is a speed setpoint. The transfer functions
are shown below:
where
is the inertia moment of a motor shaft,
is an armature resistance,
is the thyristor converter time constant,
is a thyristor converter gain, and
is an armature inductance. The transfer functions of the controllers will be defined below.
Certainly, this control scheme has a lot of advantages, because of which it is broadly used in practice: (1) the fact that the physical limits on the values of the motor armature current and voltage are taken into account; (2) the scheme provides the astatism of the first order for the speed control loop when its controller parameters are calculated in accordance with the symmetrical optimum; and (3) there is no need to know the derivatives of the measured output variables (speed and armature current) to calculate the control action. The armature current controller in this scheme is usually calculated using the technical (modulus) optimum requirements (step response with 4.3% overshoot and phase margin 63
0) and structurally implemented as a PI-controller:
Here = 2 is the conventional parameter used to meet the modulus optimum requirements.
The speed controller in such a scheme usually follows the modulus or symmetrical optimum requirements and is chosen as a proportional (P) or PI controller, respectively. Typically, considering speed, automatic electric drive systems are required to provide zero steady-state error, thus the symmetrical optimum (step response with 43% overshoot and phase margin 37
0) is applied more often. In such a case, the speed PI-controller is defined as:
Here = 4 is the conventional parameter used to meet the symmetrical optimum requirements.
In the general case, the structural scheme parameters , , and are considered to be a priori unknown values.
From Equations (2) and (3), it follows that the parameters of the controllers of the electric drive depend on the values of its electrical and mechanical parameters. In particular, the armature current PI controller depends on the parameters of the electric circuits of the motor and the low-value uncompensated time constant . The speed PI controller depends on the parameters of the motor mechanics and as well. As it is mentioned in the Introduction section, considering real electric drives, in the course of their normal functioning, the change of the motor electric circuits parameters (in particular, the armature resistance ) may reach up to 50% of the nominal values. At the same time, the motor mechanics parameters (the inertia moment) may change in a step-like way or as smooth functions of time. This is defined by the types of mechanical gears of a certain mechanism to be controlled. The most significant changes of the inertia moment occur in such mechanisms as winding machines used in the metallurgical and pulp and paper industries and excavators in the mining industry, as well as in transport mechanisms and manipulators. Considering such non-stationarity of the mechanics and electric circuits of the electric drive, the speed control quality may differ significantly from the required one. This will be demonstrated in the third section of this study.
2.2. Problem Statement
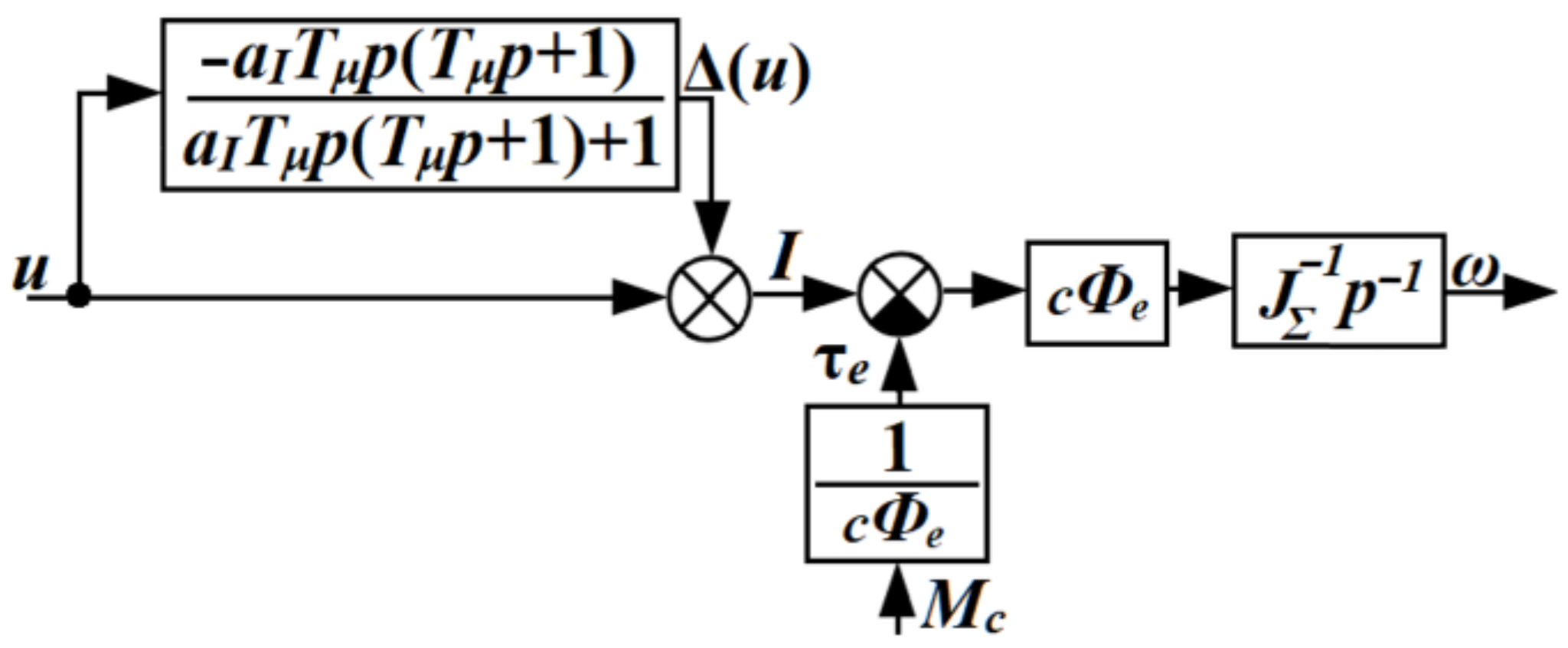
The general structural scheme of the plant of the separately excited DC motor speed control loop is shown in
Figure 2 [
1]. The transfer function to transform
into
is obtained as a closed-loop transfer function:
The scheme in
Figure 2 is relevant when the armature current loop is tuned to follow the modulus optimum (
= 2), and the back-EMF is compensated (red lines in
Figure 1 do not exist). The following assumption is introduced for further analysis.
Assumption 1. The load torque Mc is matched with the control action signal.
Considering Assumption 1, the plant of the DC drive speed control loop is described in the extended state space as:
where
∈
R2 is the state vector;
is the disturbance, which is caused by the load torque
and matched with the control action signal;
is a function to describe unmodeled dynamics (the disturbance, which is caused by the armature current loop dynamics and could not be compensated by the control signal
),
∈
R2×2 is the state matrix, and
∈
R2×1 is the input matrix. The pair
is controllable. The following assumption is introduced about the disturbance,
.
Assumption 2. The disturbance , which could not be compensated by the control signal , is bounded if the control action signal is bounded .
Then, it is rational to choose the control law
for the system (4) as an adaptive PI-controller with saturations:
Here,
is the parameter of the PI-controller proportional part;
is the parameter of the PI-controller integral part,
is an additional term to compensate for
;
is the tracking error, i.e., the difference between the rotor speed setpoint
and its actual value. The fact that
(the armature current) is bounded is taken into consideration in (5) with the help of the saturation function
and the Anti-Windup procedure
:
where
is the control action
value after application of the Anti-Windup procedure
, which is used in the integral part of the controller.
Remark 1. It follows from the chosen control law (5) with the Anti-Windup procedure (6) that Assumption 2 is met for (5).
Remark 2. In accordance with Figure 3, the disturbance is generated as a BIBO transfer function:only if the following holds simultaneously for the motor armature current control loop: (1) the armature current controller is tuned to follow the modulus optimum requirements; (2) the back-EMF is fully compensated (we consider the scheme in Figure 1, but without red lines); (3) the motor armature current controller output is not saturated. Otherwise, the disturbance is generated by some BIBO transfer functionof higher order compared to (7), but the requirements of Assumption 2 are still met.
Using (5), let the notion of the control law
, which is formed without (6), be introduced:
The control signal
is added and subtracted with
in Equation (4). Then,
is denoted as
. This notion is needed to define the reference model and arrange its hedging. As a result, (4) is rewritten as:
The required control quality of the plant (9), which is achievable under the conditions of the saturation (6) and disturbance
, is defined as:
where
∈
R2 is the reference model state vector,
∈
R2×2 is the reference model state matrix,
∈
R2×2 is the reference model input matrix. The disturbance
is calculated as the difference between the current value of the armature current
I and the control action
:
. The values of the parameters
and
are chosen so as to make the matrix
be Hurwitz one. If, additionally,
and
are chosen according to the following expressions (
= 4 is the conventional value):
Then, the reference model (10) follows the symmetrical optimum requirements, as far as the speed loop is concerned. They are obtained from (3) by making and equal to one.
The Equation (10) is subtracted from (9), and the obtained expression is added and subtracted with
to obtain:
where
,
is the pseudoinverse of
.
Using the definitions of
,
and
,
, the following equality is obtained from (12):
Finally, considering (8) and (13), the Equation (12) is transformed into:
If
,
and
, then, taking into account that
is the Hurwitz matrix, the tracking error (14) is asymptotically stable, and the required control quality (10) of the plant (4) is achieved. As
, and
are considered to be a priori unknown values, then the equalities
,
and
cannot be used to calculate the controller parameters. Therefore, the adaptive laws of functional form are to be derived for such parameters:
to meet the objective:
2.3. Main Result
To derive the adaptive laws of the controller parameters, which guarantee that the Equation (16) holds, the hyperstability theory results [
9,
14] are used. In accordance with them, the linear block of (14) is a combination of the two transfer functions:
where
is a solution of the Lyapunov equation:
is a positively defined matrix. The nonlinear components of (14)
are inputs of such transfer functions, respectively.
As
is the Hurwitz matrix, then the matrix
exists, and, following the Kalman–Yakubovich–Popov lemma, the transfer functions (17) are strictly positive real. According to [
3,
9,
14], the nonlinear block of (14) is formed as sum of the multiplications of the linear block outputs and respective nonlinear components:
According to Popov’s criterion [
14], to make the system (14) be asymptotically hyperstable, it is necessary and sufficient that the following inequality holds for the non-linear block of (14):
where
> 0 is a time-independent constant.
The following theorem is to define the adaptive laws of the form (15) to meet (20).
Theorem 1. The integral inequality (20) holds if the adaptive laws of the controller parameters are chosen as (21), whereandare the parameters of the integral and proportional parts of the adaptive laws, respectively. is the sign function.
Proof of Theorem 1. The proof of Theorem 1 and the definition of
are found to
Appendix A. □
As the inequality (20) holds when the adaptive laws (21) are used for (14), the Lyapunov function candidate is chosen as:
It is positive semi-definite all the time, as: (1) because (see Equation (18)), (2) the sum of the second and third terms of (22) is also equal or above zero, as the third term is equal or above (see Equation (20)).
Considering (14), the function (22) is differentiated to obtain the following:
Then, the derivative of (22) is a negative semi-definite function when the adaptive laws (21) are applied. Thus,
and
,
,
, and the Equation (22) is the Lyapunov function for the system (14). In addition, having analyzed the expression
It is concluded that the function (22) has a finite limit when . Thus. and, consequently .
The second derivative of (22) is obtained as follows:
Based on the above-proved facts,
and
, and, using Assumption 2,
. Then
and the function (23) are uniformly continuous and, following Barbalat’s lemma, converge to zero when
. This means that the objective (16) is achieved when the adaptive laws (21) are applied [
15].








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}