Abstract
In this work, the ship relative integrated navigation approaches are studied for the navigation scenarios with the measurements disturbed by unknown statistical property noises and with the injected fault measurement attacks. On the basis of the limited energy property of system noises, the navigation states are estimated by the local finite horizon H∞ filter to satisfy the performance index function. Then, the local estimates are fused in the relative integrated navigation system with the weight fusion parameters obtained by using the local estimate error measurements. Further, the injected fault measurement attacks are considered in the relative integrated navigation systems. Due to the system noises and the measurement noises having unknown statistical property, the classical Chi-square test can hardly be utilized to detect the injected fault measurements. Therefore, a secure relative integrated navigation method is proposed with a distance-based clustering detector. The finial simulation results illustrate the effectiveness of the proposed relative integrated navigation approach and the proposed secure relative integrated navigation approach.
1. Introduction
The application of maritime communication networks brings opportunities and challenges to ship integrated navigation systems. The ship integrated navigation system can use the navigation information transmitted by the network to improve its own navigation accuracy. Meanwhile, it may be maliciously interfered by network attackers. Therefore, the research on secure integrated navigation methods is gradually becoming an important and key direction for integrated navigation research.
The integrated navigation system fuses the measurements obtained from GPS, inertial navigation system (INS), radar system and other navigation devices to provide accurate and reliable navigation information and is widely used in various types of ships [1,2,3,4,5,6]. With the development of marine communications technology, the International Maritime Organization (IMO) stipulates that the automatic identification systems (AIS) should be installed on international navigation vessels of 300 gross tonnage and above, non-international vessels of 500 gross tonnage and above and all passenger ships. AIS realizes the automatic exchange of important information such as position, speed, heading, ship name, call sign, etc., between ships and shores and between ships in a certain sea area. The position information of adjacent ships can be transformed into the pseudo measurement about the target ship. This is the so-called relative navigation information [7,8,9,10,11,12], and the adjacent ships in certain sea area around the target ship are taken as the relative navigation devices. In addition to using the navigation information from the target ship inherent navigation devices, the target ship’s relative integrated navigation system can also use the relative navigation measurements to obtain more accurate navigation information. In [7,8,9], the ship relative integrated navigation methods were given to fuse the navigation measurements obtained by the navigation devices owned to the target ship and relative navigation information from the adjacent ships, by using the Kalman fusion filter approach. In [10], the GPS single difference was taken to design a relative navigation method between vessels. In [11], a relative integrated navigation approach was developed to deal with the delay navigation information caused by the narrow communication bandwidth. However, it is noted that most of integrated navigation methods [1,2,3,4,5,6] and the relative integrated navigation methods above [7,8,9,10,11] were presented on the basis of the fusion filtering methods developed from Kalman filter, which require the system to assume that the system noise satisfies the Gaussian distribution with known mean and covariance. However, in practice, the statistical property of the navigation system noise is often difficult to accurately acquire. It is because that ships are often disturbed by wind, storm, surge, current or other sea factors [12].
It is noted that the system noise energy is usually limited in finite horizon. On this basis, the integrated navigation approach was studied with the augmented measurements including the measurements from INS and GPS in [13], by using the finite horizon H∞ filter. Further, the finite horizon H∞ central fusion method was utilized in the above integrated navigation approaches [14,15]. Obviously, the integrated navigation approaches developed from the finite horizon H∞ central fusion methods can also be improved to simultaneously deal with the measurements from the inherent navigation devices and the relative navigation measurements. Although these integrated navigation methods can improve the accuracy of ship navigation, if the measurements are attacked by hackers during communication, these integrated navigation approaches lack the necessary security detection and defense method, which will inevitably cause serious consequences.
Security is one of the most important requirements for the integrated navigation systems, which should be non-fragile to the malicious attacks. A number of results have been studied to detect, analyze and handle malicious attacks, which are mainly classified into two categories: Denial of Service (DoS) attack and deception attack [16,17,18,19,20,21,22,23,24,25]. The DoS attack is to jam the communications network to reduce the measurements received by the information processing center (IPC) [16,17,18,19,20,21,22,23]. For the relative integrated navigation systems, the results of DOS attack are usually manifested as the integrated navigation system not being able to receive several relative measurements in time. The deception attack is to modify the measurements by injecting the fault data (IFD) [24,25,26,27,28,29]. For the relative integrated navigation systems, if the fault measurements are injected and received by the integrated navigation systems, it will result into larger bias of the navigation information. If the ship is controlled based on the navigation information, it will cause more serious consequences. Therefore, the research on secure relative integrated navigation approaches is gradually becoming an important and key direction for integrated navigation research.
In this work, the secure relative integrated navigation approach is studied by using the inherent and relative measurements with unknown statistical property, which may be injected with false data during communication transmission. Firstly, a relative integrated navigation approach is presented, on the basis of the finite horizon H∞ distributed fusion filter, with the measurements disturbed by unknown statistical property noises. Further, the IFD attacks are considered in the relative integrated navigation systems. Due to the system noises and the measurement noises having unknown statistical property, the classical Chi-square test can hardly be utilized to detect the IFD [30,31]. A secure relative integrated navigation method with distance-based clustering detector is proposed. The final simulation verifies the effectiveness of the relative integrated navigation approach based on the finite horizon H∞ distributed fusion filter and the proposed secure relative integrated navigation approach.
The rest of this paper is organized as follows. Section 2 introduces the dynamic models of the target ship and the adjacent ships. The relative measurement transformation is presented in Section 3. In Section 4, the relative integrated navigation approach based on the finite horizon H∞ distributed fusion filter is designed for the measurements disturbed by unknown statistical property noises. The secure relative integrated navigation method is proposed in Section 5. A simulation example is provided to illustrate the effectiveness of the proposed methods in Section 6, and Section 7 concludes this work.
2. System Formulation
Consider the following linear kinematic models of a target ship and several adjacent ships in certain sea area.
where is the discrete time index, expresses the ship’ state vector, respectively refer to the east position, the north position, the speed and the course of Ship i, and is the number of the ships in the sea area. expresses the state transfer matrix of Ship i from to . is the process noise with unknown statistical property. For easy introduction of the method designed in this paper, denote Ship 1 as the target ship, and Ship l () as its adjacent ships.
The following two kinds of navigation information are received and fused in the relative integrated navigation systems. The first one is the measurement obtained from the inherent navigation devices, such as, GPS, INS. The second one is the relative measurement obtained from the adjacent ship by using AIS and transformed by the integrated navigation system. The relative navigation measurement transformation will be given in the next section. All these measurements can be preprocessed and described as follows:
where is the (relative) navigation measurement of the device, is the measurement matrix, and is the measurement noise whose statistical property is unknown. is the number of navigation measurements received by the relative integrated navigation system at .
Denote the signal of interest on the navigation of target ship as
Commonly, the whole navigation state vector is focused on; then, , and . Only the position of target ship gets more attention if .
With the development of marine communications technology, more and more navigation information can be obtained and used to improve the navigation accuracy of target ships. However, in the communication network of navigation information, when an injected false measurement attack occurs, it brings challenges to the secure navigation of ships. How to detect injected false measurements is the most important issue in this research. If the system noise meets the Gaussian distribution, the Chi-square test can be used to detect IFD attacks. However, the system noise statistical property of the relative integrated navigation systems studied in this paper are unknown. It is difficult to apply the attack detection methods based on statistical property. Therefore, in this paper, a secure relative integrated navigation approach will be studied to reduce the influence from the following two aspects: the system noises with unknown statistical property and the IFD attacks.
3. The Relative Measurement Transformation
By using AISs, the ships in a certain sea area automatically exchange the navigation state information, such as the position and the speed, which can be transformed as the relative navigation measurement of adjacent ships. The relative measurement transformation is introduced in this section.
As given in Figure 1, an adjacent ship is near the target ship 1. Denote the distance and the observation angle from the target ship 1 to the adjacent ship as , which could be obtained by the radar system on the target ship. The measurements are denoted as in this section.
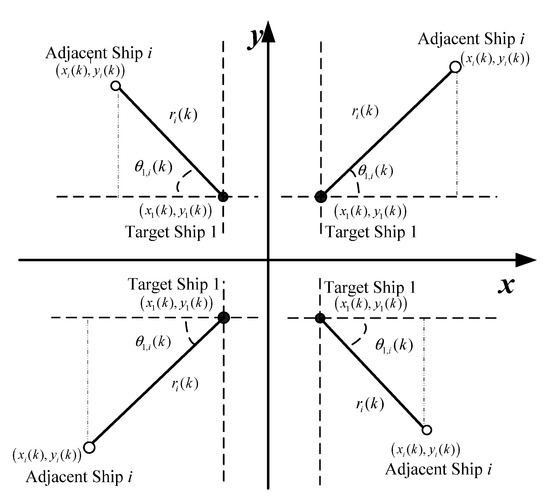
Figure 1.
The adjacent ships around the target ship.
In the first or fourth quadrants, the positions of the two ships satisfy the following function.
While in the second or third quadrants, the positions of the two ships satisfy
Assume the measurement function of the radar system is given by
here are the corresponding measurement noises.
Let be the position estimate of Ship i. Then the target ship obtains this estimate by its AIS and transforms it into the relative measurement as follows.
In the first or fourth quadrants,
In the second or third quadrants,
namely,
where
Remark 1.
The above relative measurement noises describe the model bias of the measurement functions in (7–9). Generally, the statistical attributes of the relative measurement noises are difficult to solve. In this work, the assumption that the energies of the relative measurement noise are limited is utilized to design the relative integrated navigation approaches.
6. Numerical Simulation
In this simulation, a target ship is considered with constant course and constant speed, which is marked as Ship 1. There are four adjacent ships around the target ship in certain sea area, the navigation information of which are transformed as the relative navigation measurements of the target ship. The four adjacent ships are marked as Ship 2, Ship 3, Ship 4, Ship 5. The simulation parameters are given by Table 1.

Table 1.
The simulation parameters.
Take the target ship’s position as the target ship navigation state focused on; then, , and .
In this simulation, the injected fault measurement is considered from the Ship 5. The Ship 5′s navigation information received by the target ship is injected with fault position after 60s (the 5th simulation time). In this simulation, the injected fault measurement is set as , where . The relative integrated navigation approach based on the finite horizon H∞ distributed fusion filter and the secure relative integrated navigation approach are compared in this situation. They are respectively remarked as DRF and SRF in the simulation. “AEEP” means the absolute estimation error of position.
As shown in Figure 2, Figure 3, Figure 4 and Figure 5, the simulation results of the first 5 simulation times illustrate the effectiveness of the proposed relative integrated navigation approach based on the finite horizon H∞ distributed fusion filter and the proposed secure relative integrated navigation approach. Form the 6th simulation time, the fault position of Ship 5 is injected and received by the relative integrated navigation system of the target ship. Then, the IFMs will affect the navigation accuracy of the relative integrated navigation approach, as shown in Figure 4 and Figure 5. If the target ship is further controlled in accordance with the affected navigation information, it will cause more serious consequences than those shown in Figure 3.
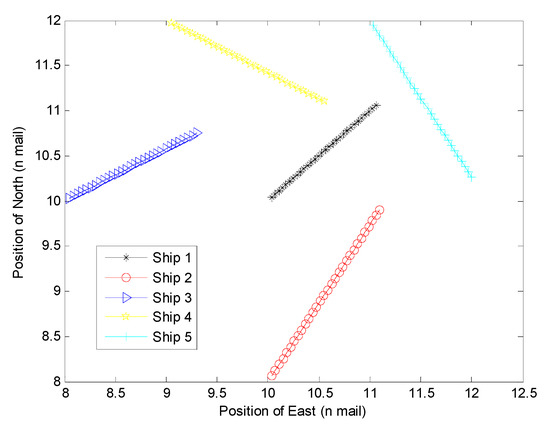
Figure 2.
The position curses of the target ship and its adjective ships.
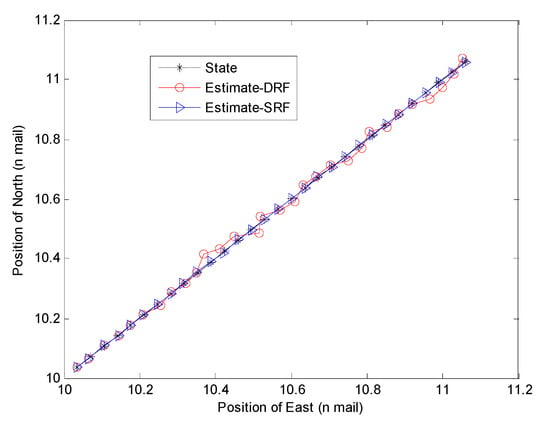
Figure 3.
The target ship position state and its estimates by the two approaches.
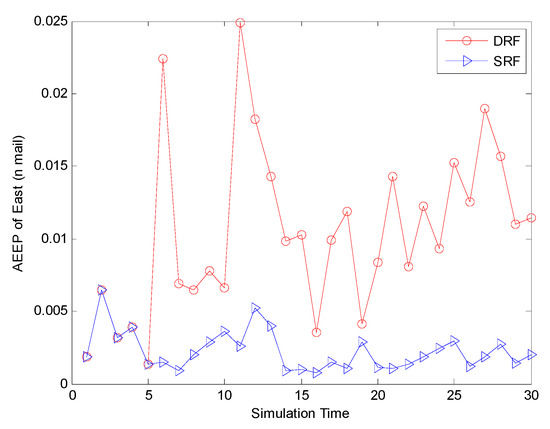
Figure 4.
The absolute estimation error of east position.
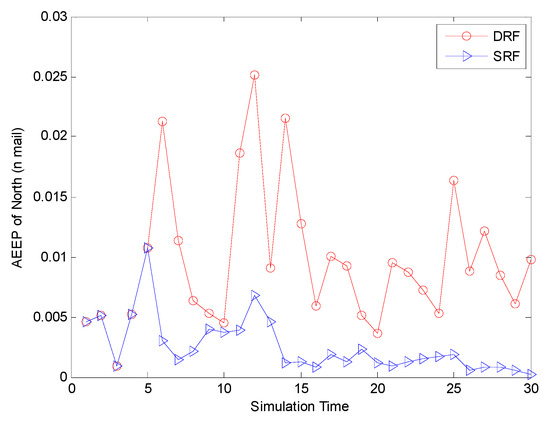
Figure 5.
The absolute estimation error of north position.
For the secure relative integrated navigation approach, most of the local estimates obtained with the IFMs could be detected by the distance-based detector. Therefore, its navigation accuracy is better than the relative integrated navigation approach using the IFMs, as shown in Figure 3, Figure 4 and Figure 5.
7. Conclusions
In the relative integrated navigation systems, the measurements from the target ship inherent device and the relative measurements from the adjective ships can be fused to obtain more accurate navigation information. In this paper, two relative integrated navigation methods are proposed for the navigation scenarios with the measurements disturbed by unknown statistical property noises and with the injected fault measurement attacks. In the relative measurement transformation, it is implied that the statistical property of the relative measurement noises are difficult to obtain. Therefore, a finite horizon H∞ distributed fusion filter-based relative integrated navigation method is presented firstly. With the help of a distance-based clustering detector, this method is further developed as a secure relative integrated navigation method to deal with the navigation measurements including injected fault measurements.
The erroneous data injection considered in this paper belongs to one category. How to design a relative integrated navigation method with better security when multiple types of fault measurements are injected into the navigation network is one of the important issues in our further research.
Author Contributions
Methodology, Y.W. (Yongjing Wang) and X.F.; validation, Y.W. (Yongjing Wang), Y.W. (Yi Wang) and X.F.; formal analysis, Y.W. (Yongjing Wang) and X.F. investigation, Y.W. (Yi Wang); writing—original draft preparation, Y.W. (Yongjing Wang) and X.F.; writing—review and editing, Y.W. (Yi Wang) and X.F. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the National Natural Science Foundation of China (nos. U1804163), the central government guides local science and technology development projects of HuBei province(2018ZYYD049) and Foundation for Young Key Teacher by Henan University of Technology (No.21420078).
Conflicts of Interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
References
- Davari, N.; Gholami, A. Variational Bayesian adaptive Kalman filter for asynchronous multirate multi-sensor integrated navigation system. Ocean Eng. 2019, 174, 108–116. [Google Scholar] [CrossRef]
- Liu, X.; Chen, B.; Wang, S.; Du, S. Correntropy Based Divided Difference Filtering for the Positioning of Ships. Sensors 2018, 18, 4080. [Google Scholar] [CrossRef] [PubMed]
- Meng, Y.; Wang, W.; Han, H.; Zhang, M. A Vision/Radar/INS Integrated Guidance Method for Shipboard Landing. IEEE Trans. Ind. Electron. 2019, 66, 8803–8810. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, C.; Zhang, D. Data Fusion Based on Adaptive Interacting Multiple Model for GPS/INS Integrated Navigation System. Appl. Sci. 2018, 8, 1682. [Google Scholar] [CrossRef]
- Qiu, A.; Shi, J.; Feng, X.; Guan, B. A navigational information fusion algorithm based on model library. Navig. China 2013, 36, 5–9. [Google Scholar]
- Xiong, W.; Zhuang, L.; Weng, H.; Liu, Y. Method of federated Kalman filtering in INS/ ESGM/Doppler integrated navigation system. J. Chin. Inert. Technol. 2001, 9, 1–11. [Google Scholar]
- Ma, G.; Ge, Q. Ship relative integrated navigation and positioning based on wireless. Autom. Instrum. 2009, 4, 112–115. [Google Scholar]
- Ge, Q. Networked Fusion with Out-of-Sequence Information and Its Application in Ship Integrated Navigation; Shanghai Maritime University: Shanghai, China, 2008. [Google Scholar]
- He, J. Research and performance analysis of integrated navigation and positioning algorithm of ship based on relative estimation. Ship Sci. Technol. 2017, 39, 90–92. [Google Scholar]
- Wang, X.; Zhou, H.; Zhang, S. Relative navigation between vessels based on GPS single difference. J. Chin. Inert. Technol. 2012, 20, 464–467. [Google Scholar]
- Liu, M.; Feng, X.; Shi, J.; Qiu, A. Optimal positioning algorithm for integrated relative navigation of ships. Navig. China 2014, 37, 6–11. [Google Scholar]
- Liu, X.; Xu, X.; Wang, Z.; Li, Y.; Liu, Y. H ∞ filter for flexure deformation and lever arm effect compensation in M/S INS integration. Int. J. Nav. Arch. Ocean Eng. 2014, 6, 626–637. [Google Scholar] [CrossRef][Green Version]
- Zhao, W.; Yuan, X.; Lin, X. Research on GPS /INS integration based on H∞ filter. J. Astronaut. 2002, 23, 39–43. [Google Scholar]
- Lin, Y.; Xue, A.; Qian, J. Discrete-time H∞ fusion filter in data fusion system. In Proceedings of the 2003 IEEE Conference on Control Applications, Istanbul, Turkey, 25 June 2003. [Google Scholar]
- Li, Q.; Wang, H.; Li, H.; Liu, X.; Lin, F. Centralized H∞ Fusion Filter Design in Multi-Sensor Data Fusion System. In Proceedings of the 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, China, 21–24 September 2008; pp. 603–607. [Google Scholar]
- Gao, L.; Li, Y.; Zhang, L.; Lin, F.; Ma, M. Research on Detection and Defense Mechanisms of DoS Attacks Based on BP Neural Network and Game Theory. IEEE Access 2019, 7, 43018–43030. [Google Scholar] [CrossRef]
- Xu, W.; Ho, D.W.C.; Zhong, J.; Chen, B. Event/Self-Triggered Control for Leader-Following Consensus Over Unreliable Network with DoS Attacks. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3137–3149. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, L.; Feng, G. Consensus of Heterogeneous Linear Multiagent Systems Subject to Aperiodic Sampled-Data and DoS Attack. IEEE Trans. Cybern. 2018, 49, 1501–1511. [Google Scholar] [CrossRef]
- Ai, Z.; Peng, L.; Cao, M. Optimal Attack Schedule for Two Sensors State Estimation Under Jamming Attack. IEEE Access 2019, 7, 75741–75748. [Google Scholar] [CrossRef]
- Dong, S.; Abbas, K.; Jain, R. A Survey on Distributed Denial of Service (DDoS) Attacks in SDN and Cloud Computing Environments. IEEE Access 2019, 7, 80813–80828. [Google Scholar] [CrossRef]
- Bhuyan, M.H.; Kashyap, H.J.; Bhattacharyya, D.K.; Kalita, J.K. Detecting Distributed Denial of Service Attacks: Methods, Tools and Future Directions. Comput. J. 2013, 57, 537–556. [Google Scholar] [CrossRef]
- Tan, Z.; Jamdagni, A.; He, X.; Nanda, P.; Liu, R.P.; Hu, J. Detection of Denial-of-Service Attacks Based on Computer Vision Techniques. IEEE Trans. Comput. 2014, 64, 2519–2533. [Google Scholar] [CrossRef]
- Chen, W.; Ding, D.; Dong, H.; Wei, G. Distributed Resilient Filtering for Power Systems Subject to Denial-of-Service Attacks. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 49, 1688–1697. [Google Scholar] [CrossRef]
- Mo, Y.; Sinopoli, B. Integrity attacks on cyber-physical systems. In Proceedings of the 1st International Conference on High Confidence Networked Systems, Beijing, China, 17–18 April 2012; pp. 47–54. [Google Scholar]
- Xue, D.; Jing, X.; Liu, H. Detection of False Data Injection Attacks in Smart Grid Utilizing ELM-Based OCON Framework. IEEE Access 2019, 7, 31762–31773. [Google Scholar] [CrossRef]
- Liu, Y.; Ning, P.; Reiter, M.K. False data injection attacks against state estimation in electric power grids. ACM Trans. Inf. Syst. Secur. 2011, 14, 1–33. [Google Scholar] [CrossRef]
- Manandhar, K.; Cao, X.; Hu, F.; Liu, Y. Detection of Faults and Attacks Including False Data Injection Attack in Smart Grid Using Kalman Filter. IEEE Trans. Control. Netw. Syst. 2014, 1, 370–379. [Google Scholar] [CrossRef]
- Choeum, D.; Choi, D.-H. OLTC-Induced False Data Injection Attack on Volt/VAR Optimization in Distribution Systems. IEEE Access 2019, 7, 34508–34520. [Google Scholar] [CrossRef]
- Pham, C.; Wang, L.; Tak, B.; Baset, S.; Tang, C.; Kalbarczyk, Z.; Iyer, R. Failure Diagnosis for Distributed Systems using Targeted Fault Injection. IEEE Trans. Parallel Distrib. Syst. 2016, 28, 1. [Google Scholar] [CrossRef]
- Jiang, T.; Matei, I.; Baras, J.S. A trust based distributed Kalman filtering approach for mode estimation in power systems. In Proceedings of the Workshop on Secure Control Systems, Stockholm, Sweden, 12 April 2010; pp. 1–6. [Google Scholar]
- Wen, F.; Wang, Z. Distributed Kalman filtering for robust state estimation over wireless sensor networks under malicious cyber attacks. Digit. Signal Process. 2018, 78, 92–97. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).