Abstract
Prescribed performance control (PPC) provides an effective framework for explicitly enforcing transient and steady-state performance constraints in autonomous underwater vehicle (AUV) trajectory tracking. However, in practical underwater environments, unavoidable localization errors, model uncertainties, and actuator saturation render conventional PPC schemes unsuitable due to their inherent semi-globality and singularity issues. To address these limitations, this paper proposes a globally nonsingular PPC framework for AUV tracking control under model uncertainties and input saturation. A novel error transformation function is developed, which fundamentally eliminates semi-global and singular behaviors without imposing additional control effort or modifying the initial error. Furthermore, a predefined-time disturbance observer is designed without requiring prior knowledge of disturbance bounds, and a predefined-time saturation compensator is introduced to mitigate actuator limitations. By integrating these components into a backstepping-based control structure, all closed-loop error signals are guaranteed to converge to an arbitrarily small neighborhood of the origin within a predefined time. Numerical simulations validate the effectiveness and superiority of the proposed method.
1. Introduction
High-performance tracking control, as a key enabling technology for autonomous underwater vehicles (AUVs) performing complex marine missions, has been extensively investigated over the past decade and has remained a persistent research focus for both control theorists and engineering practitioners [1,2,3]. In AUV trajectory tracking tasks, inevitable model uncertainties, which are induced by imprecise model parameters as well as external time-varying perturbations, tend to exert significant adverse effects on controller performance [4,5]. Therefore, how to further enhance the tracking control performance of AUVs under model uncertainties has been regarded as a research topic of substantial theoretical importance and engineering value.
To mitigate the adverse effects of model uncertainties on AUV tracking performance, existing control strategies generally follow two main approaches. The first approach enhances disturbance rejection by exploiting the inherent robustness of the control law itself, such as finite-time control [6] and fixed-time nonsingular terminal sliding mode control [7,8]. The second approach incorporates disturbance estimation mechanisms into the control framework to achieve online estimation and compensation of unknown disturbances, including robust differentiators [9], extended state observers [10], and disturbance observers [11]. It has been widely demonstrated that both approaches can effectively attenuate the impact of model uncertainties on tracking performance. Owing to their structural flexibility and relative simplicity of implementation, disturbance-observer-based control strategies have found broader application in AUV motion control. However, in most of these observer-based schemes, only asymptotic convergence of system states can typically be guarantee, i.e., the convergence of the states within a finite time interval cannot be ensured. As a result, finite-time control theory, which encompasses finite-time [12], fixed-time [13], and predefined-time control [14], has been further introduced into the AUV control framework, thereby improving the convergence rate of the control system. However, control schemes designed purely on the basis of above finite-time control theory usually fail to simultaneously provide explicit guarantees on both transient and steady-state performance, which are highly desirable in many practical AUV applications.
Prescribed performance control (PPC) enables the simultaneous regulation of transient behavior and steady-state accuracy within a unified framework, thereby allowing precise shaping of control performance. This methodology has demonstrated significant advantages in various nonlinear electromechanical systems, including AUVs [15,16,17], permanent magnet synchronous motor platforms [18], and autonomous ground vehicles [19]. Therefore, PPC provides a promising and effective approach for developing tracking control frameworks for AUV systems. Earlier studies introduced PPC into AUV motion control and successfully achieved the prescribed performance [20,21]. Subsequently, several studies further refined the performance function design by improving the boundary specifications, including enhancements of bilateral performance bounds [22] and modifications of unilateral bounds [23], thereby achieving stricter overshoot constraints. Furthermore, finite-time control strategies were incorporated into PPC frameworks to further enhance the steady-state performance while maintaining transient constraints [24,25,26]. However, these studies primarily concentrated on optimizing performance boundaries to improve transient and steady-state behavior, while largely overlooking the inherent semi-globality and singularity issues associated with classical PPC schemes, which significantly restrict their applicability in practical AUV scenarios [27]. More specifically:
- (a)
- Semi-globality. Most existing PPC schemes require the initial state of the AUV to lie within the prescribed performance boundary. This assumption is often unrealistic for AUVs operating in harsh marine environments, where localization errors may be considerable. Moreover, in order for this assumption to hold, excessively conservative performance boundaries must typically be selected, which inevitably degrades the achievable control quality of PPC.
- (b)
- Singularity. When the system configuration approaches the performance boundary, the control input generated by traditional PPC schemes will tend to infinity, which is particularly painful for AUV systems subject to input saturation constraints and model uncertainties. On the one hand, during the initial phase of tracking, input saturation may cause the system state to reach or even exceed the boundary, while on the other hand, unknown disturbances may also drive the system to violate the prescribed constraints in the steady-state stage. In addition, when disturbance observers are incorporated into the control framework, the initial observation error may likewise result in boundary violation. In other words, under conditions involving input saturation and model uncertainties, it is almost unavoidable that the system state will touch or exceed the performance boundary, rendering conventional PPC strategies unsuitable for direct application to AUV tracking control.
To address the Semi-globality of classical PPC methods, several global PPC schemes have been proposed in recent years, which can be broadly divided into two categories, with one category being based on globally defined performance boundaries [28,29,30,31] and the other being constructed via transfer functions [32,33,34]. In the first category, the initial performance boundary is designed to be unbounded, such that any initial system state can be guaranteed to lie within the boundary, and in the second category, transfer functions are employed to map the error variable to the origin, ensuring that it remains within the prescribed performance region. However, both categories are prone to singularity issues at the initial stage, and the enforced adjustment between the initial state and the performance boundary typically results in additional control effort. Moreover, since the initial value of the transformed error is forced to be close to zero, the initial transient performance of the system may be undesirably weakened. To suppress instability arising from singularity of traditional PPC methods, a series of nonsingular PPC frameworks have been proposed, where the performance constraint is intentionally relaxed so that singular points can be avoided [27,35,36]. Despite this improvement, these controllers still require pre-calculation of a lower bound on the control input, which results in a conservative performance margin. Furthermore, once the prescribed boundary is violated, the state cannot be strictly guaranteed to re-enter the admissible region, revealing that the issue of singular behavior remains essentially unresolved. Therefore, even with the above improvements, it remains challenging to construct a global, nonsingular PPC framework for AUV trajectory tracking that is simultaneously robust to model uncertainties and input saturation.
Motivated by the above discussions, this paper addresses the problem of predefined-time globally nonsingular prescribed performance trajectory tracking control for AUV systems subject to model uncertainties and actuator saturation. The main objective is to construct a unified control framework that simultaneously guarantees global stability, eliminates singularity in the prescribed performance transformation, and achieves predefined-time convergence, while maintaining robustness against unknown disturbances and input constraints. The key challenge lies in integrating globally nonsingular prescribed performance control with predefined-time stability theory in a systematic manner, such that all error trajectories remain within prescribed performance bounds and converge within a user-specified time interval without requiring restrictive assumptions on disturbance bounds or control input limits. On this basis, the primary contributions of this paper are summarized as follows:
- 1.
- A novel PPC method is introduced. Specifically, a new error transformation method is designed, by which the inherent semi-globality and singularity issues existing in classical PPC methods are effectively eliminated. In contrast to the existing globally PPC approaches [28,29,30,31], the proposed method does not impose any additional burden on the control input during the initial phase, nor does it forcibly modify the initial value of the error variable, whereby superior transient tracking performance can be achieved at the startup stage. Moreover, unlike the available nonsingular PPC schemes [32,33,34], no prior computation of the control input bound is required, which provides greater flexibility in controller design. More importantly, the error state is allowed to enter and leave the prescribed boundary freely without inducing singularity, making the proposed framework more suitable for practical engineering application of AUVs.
- 2.
- A novel disturbance observer is developed, whose design does not rely on any prior knowledge of the disturbance magnitude or its upper bound. Compared with conventional observers that explicitly depend on disturbance-bound assumptions [9,10,11], the proposed observer is better suited for AUV operations subject to strong modeling uncertainties and unknown marine environmental perturbations.
- 3.
- A novel unified control architecture is established for AUV systems under model uncertainties and actuator saturation, in which global stability, singularity-free prescribed performance, and predefined-time convergence are simultaneously achieved within a single theoretical framework. Unlike existing approaches where these properties are addressed separately, the proposed design systematically embeds the globally nonsingular PPC mechanism into a predefined-time control structure via backstepping, thereby ensuring that all error trajectories evolve within prescribed performance bounds and converge within a user-specified time interval without introducing singularities. The disturbance observer and saturation compensation mechanism are further incorporated to preserve these guarantees in the presence of uncertainties and input constraints.
2. Preliminaries
2.1. The Motion Model of an AUV on
In this paper, for notational simplicity, the motion equations of the AUV are described on . To describe the AUV motion in this geometric framework, an inertial frame and a body-fixed frame are need introduced, and the relevant motion variables are expressed with respect to these two coordinate systems. The definitions of the coordinate frames and the associated motion quantities are summarized in Table 1, while the spatial motion of the AUV is illustrated schematically in Figure 1.

Table 1.
Symbols and parameter definitions of the AUV motion system.
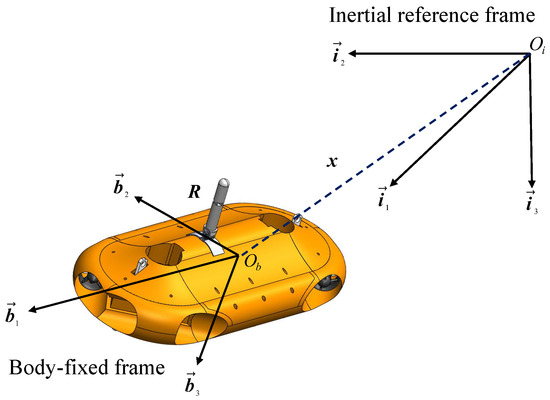
Figure 1.
The motion of an AUV.
Assuming that the AUV has an approximately three-plane symmetric structure and that its center of gravity coincides with its centroid , the spatial motion of the vehicle can be accurately characterized on . Based on this characterization, the kinematic and dynamic models of the AUV are formulated as follows [37,38]:
where the symbols , , , , , , , and are employed to represent the configuration, velocity, inertia, Coriolis effects, hydrodynamic damping, restoring force, control input, and external unknown disturbances of AUVs, respectively. The corresponding mathematical formulations for each term are presented below for subsequent analysis and controller design:
where denotes the isomorphic mapping from to the Lie algebra associated with . All detailed definitions of variables are provided in Table 1. To account for parameter uncertainties of AUVs, the system parameters are represented as follows:
where terms with the subscript 0 denote nominal values, while the terms correspond to unknown model deviations.
Furthermore, the dynamic of the AUV can be reformulated using nominal parameters, thereby explicitly representing the system’s uncertainties as deviation terms, as shown below:
In this formulation, represents the aggregate uncertainty of the system, and its mathematical expression is given as follows:
Assumption 1.
It is assumed that the actuator saturation of the AUV is non-persistent throughout the operation. Moreover, the designed reference trajectory is required to satisfy the physical actuation constraints of the vehicle and thus remains within the available control limits.
2.2. Notations and Lemmas
For clarity of presentation, several notations and auxiliary functions used throughout this paper are introduced in this subsection. For a scalar x, the generalized sign function is defined as:
where denotes the standard sign function. For a vector , the functions and are defined in an element-wise manner as:
where represents the saturation operator.
Lemma 1
([39]). Consider the nonlinear system described by:
If there exists a function that is positive definite and radially unbounded, together with constants , , and , such that the time derivative of satisfies:
then the system state is guaranteed to converge into a small neighborhood of the origin within the predefined time not exceeding .
Lemma 2
([39]). For any real numbers a and b, and positive constants , , and , the following inequality holds:
Lemma 3
([40]). Let be arbitrary positive real numbers. Then the following inequalities hold:
- 1.
- For ,
- 2.
- For ,
3. Construction of the Novel PPC Method
In this section, the structural formulation of the proposed globally nonsingular PPC scheme is elaborated, and a comparison with the classical PPC approach is conducted, as depicted in Figure 2. The comparison reveals that a novel globally nonsingular error transformation is introduced, whereby the global non-singularity of the overall PPC architecture is guaranteed.
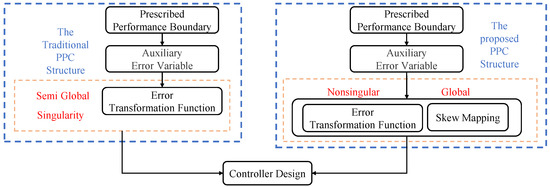
Figure 2.
The structural comparison of two PPC methods.
3.1. Development of the Performance Function and Error Variable
Within the PPC scheme, a time-dependent performance function is commonly employed to regulate the transient and steady-state behavior of the tracking error, thereby achieving the prescribed control performance. In this paper, the classical exponential decay function is adopted, which can be expressed as follows:
Within this formulation, , and l play a decisive role, as they jointly determine the entire convergence profile of the system response.
To guarantee that the prescribed performance requirements are achieved, the error signal e is required to satisfy the following constraint:
Finally, in preparation for the subsequent method design, the error signal e is normalized and transformed into an auxiliary error variable . Up to this stage, the steps that coincide with the conventional PPC methodology have been completed, and the subsequent subsections will present the major improvements embodied in the proposed scheme.
3.2. Design of a Novel Globally Nonsingular Error Transformation
In traditional PPC schemes, a homeomorphic function is typically employed to map the constrained tracking error into an unconstrained auxiliary variable , that is, . Nevertheless, this transformation is only valid when the initial error lies strictly within the prescribed performance bounds. Once the initial state falls outside these bounds, leaves the admissible domain of , rendering the transformation ill-defined and revealing the lack of global applicability. In addition, when the tracking error approaches or crosses the performance boundary, which frequently occurs in practice due to actuator saturation or unexpected disturbances, the transformation function tends to become singular. Such singularities may trigger uncontrollable transients or even irreversible instability in the closed-loop system. As a consequence, PPC approaches relying on conventional error transformations often have to be designed in an overly conservative manner, which significantly restricts their usefulness in engineering implementations. To overcome the structural drawbacks associated with traditional error-transformation schemes, this work develops a new error transformation T that is globally nonsingular. The proposed formulation incorporates a skew-mapping mechanism to reshape the constrained variable into an unconstrained auxiliary variable . The resulting transformation is expressed as follows:
where is the traditional homeomorphic function, and is the predefined skew angle. For ease of theoretical development in the following derivations, two auxiliary quantities denoted by and are introduced. With these definitions, the relation given below can be readily established:
In this paper, the logarithmic transformation is adopted as the nominal error mapping in the conventional PPC framework. Building upon this baseline, a skew–mapping mechanism is further incorporated to construct a novel globally nonsingular error transformation. The correspondence between the resulting error variables is presented in Figure 3.
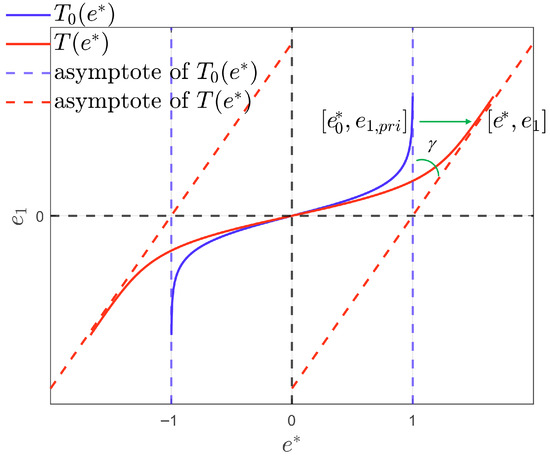
Figure 3.
The novel error transformation.
As shown in Figure 3, the proposed skew-symmetric mapping fundamentally extends the domain of the transformed error variable from the bounded interval to the entire real line . This domain expansion effectively overcomes two inherent limitations of conventional PPC schemes, namely the lack of global applicability and the emergence of singularities as the error approaches the prescribed performance boundaries.
It is worth noting that the proposed transformation T can be interpreted as a secondary skew mapping applied to the original function . Through this new transformation process, the constrained error variable s converted into an unbounded transformed error variable .Consequently, by designing a controller that guarantees the boundedness of ,the original constrained error e can be driven to satisfy the prescribed performance in an approximate manner.
Remark 1.
Although non-singularity is guaranteed for all , practical implementation requires careful tuning of this parameter. In particular, overly small values of β tend to amplify control activity near the performance boundaries, potentially inducing input oscillations. For most standard mechanical systems, setting β to approximately 10 offers a reasonable trade-off between smooth control action and performance preservation, especially when input saturation is limited to the early transient response.
3.3. Dynamics of the Transformed Error Variable
As discussed previously, the objective of the prescribed performance controller is to guarantee the convergence of the unconstrained error variable . To facilitate controller synthesis, this subsection derives the time-evolution of .
Recalling the error transformation:
the time derivative of can be obtained by applying the chain rule, yielding:
Considering that the auxiliary error satisfies , the above expression can be rewritten in the following equivalent form:
After carrying out a sequence of algebraic manipulations and rearranging the terms, the closed-form expression of the transformed error dynamics is eventually obtained as:
This result establishes an explicit differential relationship between the transformed error variable , the normalized tracking error , and the performance function , which forms the basis for the subsequent controller design.
4. The Design of PPC Scheme with Predefined-Time Method
This section elaborates on the development of the proposed predefined-time PPC control framework and presents the associated design methodology in detail. First, by exploiting the previously established geometric representation, the error dynamics of the AUV are designed directly on ,enabling a concise yet globally valid description of the vehicle’s motion. Then, the predefined time control strategy is incorporated into the proposed PPC framework to construct a globally nonsingular AUV tracking controller, within which a predefined-time disturbance observer and a predefined-time compensation mechanism are seamlessly embedded. Finally, rigorous theoretical analysis is carried out to prove the stability of the closed-loop system. The flowchart of the proposed method is illustrated in Figure 4.
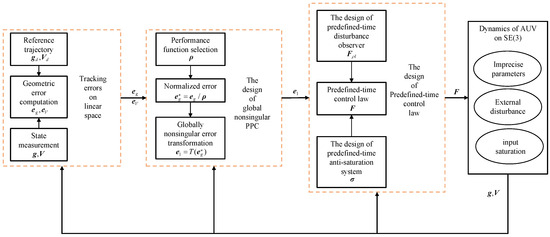
Figure 4.
The flowchart of the proposed tracking control scheme.
4.1. The Geometric Representation of AUV Error Dynamics
The configuration of the AUV evolves on the special Euclidean group , while the desired configuration is represented as a smooth curve on , namely,
Here, and represent the desired rotation matrix and position vector, respectively. From the desired configuration , the associated group velocity can be obtained, which evolves on the tangent bundle of . This velocity belongs to the Lie algebra and admits a natural representation through the group trivialization, given by:
where and denote the desired angular velocity and linear velocity, respectively. Given the configuration , the tracking error of AUVs is constructed as:
where the rotational and translational components are defined by [14]:
with the attitude error:
In addition, the velocity error is formulated as [14]:
By combining the AUV motion models, the error dynamics can be compactly expressed as [14]:
where
and .
To facilitate a more compact and tractable formulation in the subsequent controller design, the error dynamics is further reorganized and expressed in an equivalent yet more concise form as follows:
where , , and .
4.2. The Construction of the Proposed Controller
To ensure that the configuration error satisfies the prescribed performance specifications, a time-varying performance boundary is first imposed on the error vector :
and the auxiliary error variable is introduced to characterize its evolution relative to the boundary:
Now, the novel error-mapping function proposed in Section 3 is applied to , yielding the unconstrained transformed error and the intermediate error variable as:
where T represents the globally nonsingular error transformation defined in Section 3. By further incorporating the relationship given in Equation (25) into the preceding derivations and performing appropriate algebraic rearrangements, the dynamic equation of can be obtained in the following form:
The quantities and are specified through the following analytical expressions:
The backstepping-based design procedure is subsequently adopted. First, a Lyapunov candidate functions is constructed as:
By differentiating both sides of the above relation, the following result is obtained:
where is the error variable of next step, and is the virtual control law designed as:
where , , , , and denotes a positive predefined time constant selected according to the task requirements. By substituting into Equation (45) and performing algebraic simplification, the following expression is obtained:
From Lemma 3, it follows that:
By substituting Equation (48) into Equation (47), we have:
In addition, based on the result of Lemma 2, the following inequality can be derived:
By substituting Equation (50) into Equation (49) and subsequently simplifying the expression, the following result is obtained:
Subsequently, the Lyapunov candidate functions of next step is constructed as:
The derivative of is given by:
Accordingly, the predefined-time control law can be constructed in the following form:
where , , , and denotes the disturbance estimate generated by the disturbance observer that will be designed later.
Based on the AUV dynamic model given in Equation (37), and inspired by the methodology [41], a predefined-time Luenberger-type disturbance observer is developed in the following form:
Here, denotes the auxiliary state variable of the observer, is a positive diagonal gain matrix, and . The variable serves as the estimate of , and its explicit design is given as follows:
where , , , , and denotes the predefined time constant of the disturbance observer.
Theorem 1.
Proof.
The Lyapunov candidate functions of disturbance observer is constructed as:
The derivative of is given by:
From Lemma 3, it follows that:
Hence, we have:
According to the result of Lemma 1, the error is guaranteed to converge to the origin within the predefined time . We now proceed to consider the variable :
Consequently, the estimation error is also guaranteed to converge to the origin within the predefined time . This completes the proof. □
Finally, in order to mitigate the adverse effects of input saturation, a predefined-time anti-saturation auxiliary system is further constructed in the following form:
Here, is introduced to ensure that, once the input saturation vanishes, the saturation auxiliary variable converges to zero within the predefined time. Its design is given as follows:
where , , .
Finally, by integrating the disturbance observer and the saturation compensator into the control framework, the resulting predefined-time anti-saturation control law is updated as follows:
Remark 2.
Although related concepts have been studied in our earlier publications [3,14], those results addressed global nonsingular prescribed performance and predefined-time control separately. The main novelty of this paper lies in establishing a unified theoretical framework that rigorously guarantees their simultaneous realization for uncertain AUV systems with input saturation.
4.3. The Stability Analysis
Theorem 2.
For the AUV system subject to model uncertainties and input saturation, as described by Equation (1), if the virtual control term in Equation (46), the disturbance observer in Equation (55), the saturation compensator in Equation (62), and the predefined-time control law in Equation (54) are applied, then all the error states of the resulting closed-loop system are guaranteed to converge, within the predefined time , to a bounded small neighborhood of the origin.
Proof.
The Lyapunov candidate functions of the closed-loop system is constructed as:
The derivative of is given by:
By substituting Equation (53), Equation (58), and Equation (64) into Equation (66), and performing appropriate algebraic simplifications, the following expression can be obtained:
First, consider the case . In this situation, the saturation compensator is activated, and the following relation can be derived:
In accordance with Lemma 1, all tracking errors are guaranteed to converge, within the predefined time , to an arbitrarily small neighborhood of the origin.
On the other hand, when , no input saturation occurs and thus . Under this condition, substituting Equation (62) into Equation (67), we have:
According to Lemma 1, it can be concluded that all tracking errors also converge to an arbitrarily small neighborhood of zero within the predefined time . This completes the stability proof. □
5. Numerical Simulation
In this section, three groups of numerical simulations are conducted to comprehensively demonstrate the effectiveness and superiority of the proposed control strategy. In Case 1, the effectiveness of the designed disturbance observer and tracking controller is verified. Case 2 focuses on evaluating the global property and non-singularity of the proposed prescribed-performance control framework. Finally, Case 3 highlights the performance advantages of the proposed method in comparison with existing global prescribed-performance control schemes.
The simulations are carried out on the ODIN AUV platform developed by the University of Hawaii, whose true model parameters are listed in Table 2. To emulate parametric uncertainties encountered in practice, the parameters employed in the controller design are selected as 1.2 times the true values. Moreover, an external unknown disturbance is imposed in all simulation scenarios, which is specified as follows:
Finally, across all three cases, the AUV begins tracking from a stationary condition, and identical control parameters are adopted throughout the simulations unless explicitly stated otherwise, as summarized in Table 3. All simulations presented in this section were conducted in the Simulink environment of MATLAB 2022a. A fixed-step discrete implementation was adopted with a sampling time of 0.01 s.
Table 2.
Parameters of the vehicle.
Table 3.
Control parameters.
Remark 3.
For a practical 200 kg class AUV, the maximum available thrust is typically 200–300 N. To verify the global and singularity-free properties of the proposed prescribed performance control scheme under large initial errors, the thrust bound in the simulations is increased to 600 N to ensure that the prescribed convergence requirements can be satisfied.
- Case 1. Comprehensive Validation of Control Effectiveness
In this case, the desired position is specified as:
According to the desired position, the corresponding desired attitude is specified as:
The prescribed performance bounds are chosen as:
Additionally, in this case, zero-mean Gaussian white noise with unit variance is injected into all six degrees of freedom, i.e.,
The selected bounds ensure that the initial configuration of the AUV lies in the specified constraints. The scenario in which the system configuration starts outside the prescribed boundaries will be further investigated in next case. Numerical simulations are conducted under three different initial configurations listed in Table 4, and the corresponding results are presented in Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11 and Figure 12.
Table 4.
Initial configurations of the AUV.
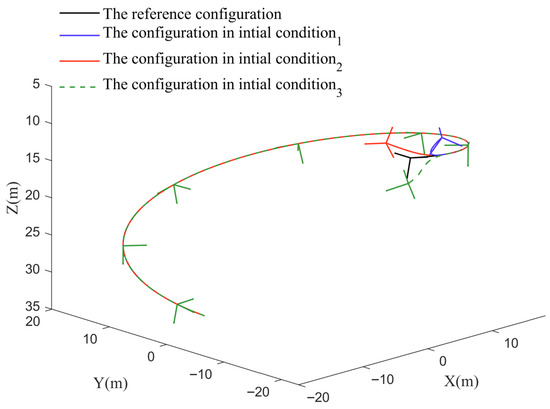
Figure 5.
The results of the configuration.
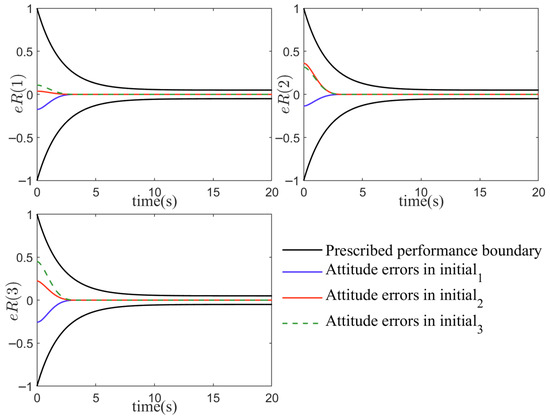
Figure 6.
The results of the attitude error.
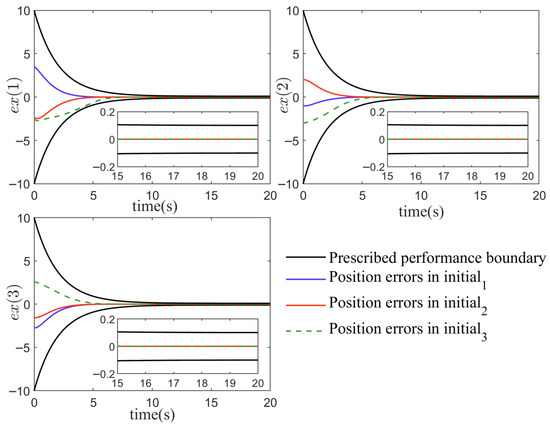
Figure 7.
The results of the position error.
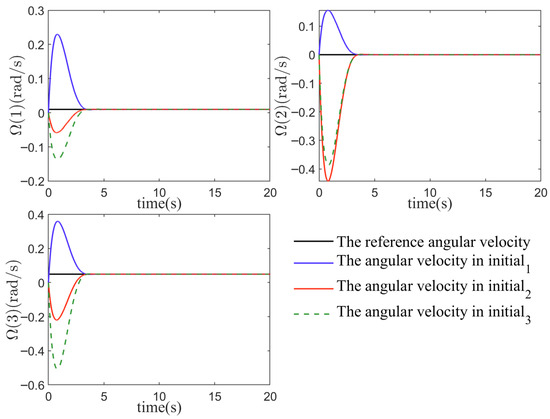
Figure 8.
The results of the angular velocity.
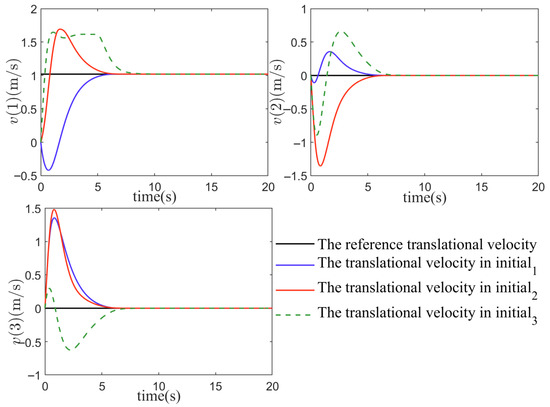
Figure 9.
The results of the linear velocity.
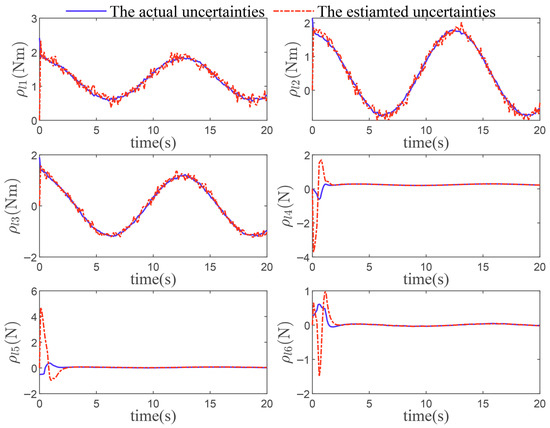
Figure 10.
The results of the disturbance observer.
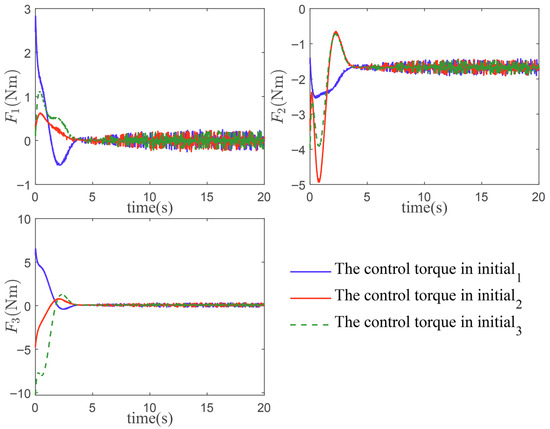
Figure 11.
The results of the control torque.
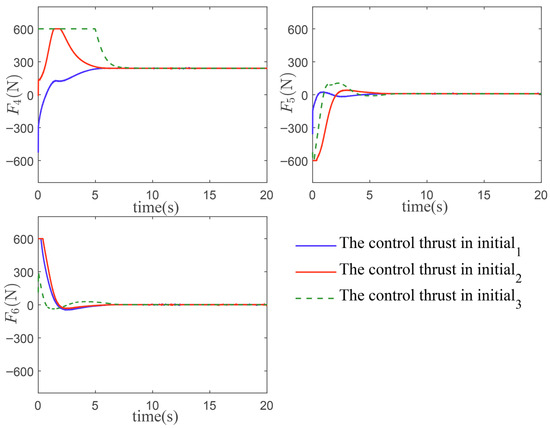
Figure 12.
The results of the control thrust.
The evolution of the AUV configuration, together with the attitude and position error vectors, is illustrated in Figure 5, Figure 6, and Figure 7, respectively. It can be clearly observed that both the attitude and position errors converge within the predefined time. Moreover, their convergence processes strictly comply with the prescribed transient and steady-state performance specifications, thereby demonstrating the effectiveness of the proposed control scheme in terms of both convergence speed and steady-state accuracy.
The time responses of the angular velocity, linear velocity, and the disturbance observer estimates are presented in Figure 8, Figure 9, and Figure 10, respectively. For brevity, only the observer estimation results corresponding to the initial configuration 1 are reported. It can be observed that both the angular and linear velocities converge within the predefined time. In addition, the proposed disturbance observer is capable of accurately estimating the disturbances within the prescribed time interval, which confirms its effectiveness and convergence performance.
The time evolution of the control inputs is depicted in Figure 11 and Figure 12. At the initial stage, relatively large control efforts are generated to rapidly drive the AUV toward the desired reference configuration. As the tracking errors decrease and the system transitions into steady operation, the control inputs gradually diminish and settle at moderate levels, thereby ensuring sustained alignment with the reference state. In addition, under the influence of high-frequency measurement noise, the control torque output becomes less smooth and exhibits noticeable oscillations. In fact, the observed oscillations mainly stem from the excessively small steady-state bound specified in the prescribed performance function for the attitude error, which renders the controller overly sensitive to high-frequency noise.
- Case 2. Validation of the global and nonsingular properties of the proposed PPC method
In this case, numerical simulations are again conducted under three different initial conditions, where the initial states and reference configurations are identical to those considered in Case 1. The distinction lies in the fact that the initial values of the performance bounds are deliberately reduced, such that the system states start outside the prescribed boundaries, in order to examine the global applicability of the proposed method. Specifically, the prescribed performance bounds are modified as follows:
In addition, to further examine the nonsingular property of the proposed method, deliberate perturbations are introduced to drive the system state outside the prescribed boundaries after steady-state convergence. Specifically, in order to evaluate the performance of the control law under boundary violations, some deviations are imposed over the time intervals of 15–15.5 s, as described below:
The corresponding error tracking results are illustrated in Figure 13 and Figure 14.
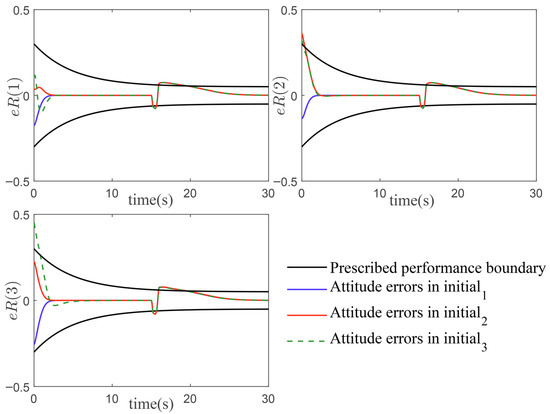
Figure 13.
The results of the attitude error in Case 2.
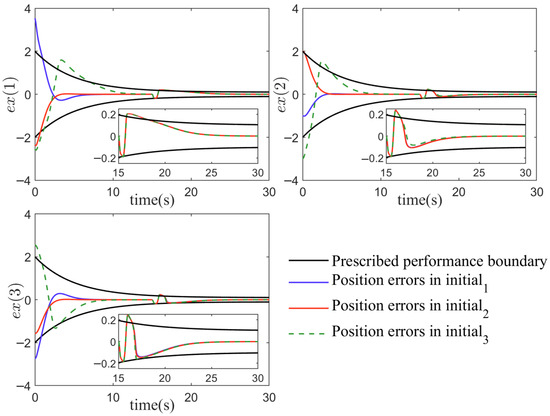
Figure 14.
The results of the position error in Case 2.
First, it can be observed that even when the initial system state does not lie within the prescribed performance bounds, the proposed control scheme is still capable of achieving convergence in an approximate prescribed-performance sense, thereby demonstrating its global applicability. Moreover, whether the system state exceeds the prescribed boundaries during the initial phase due to actuator saturation, or the attitude state is driven outside the boundaries by sudden disturbances in the steady-state phase, the proposed controller can effectively steer the state back into the prescribed region. These properties clearly indicate the nonsingular nature of the proposed approach. The combination of global applicability and non-singularity substantially enhances the practicality and robustness of PPC methods for AUV engineering applications.
The time evolution of the control inputs is depicted in Figure 15 and Figure 16. It can be observed that when the error state approaches the prescribed performance boundary, the control input reaches saturation, thereby enhancing the corrective action and driving the system state rapidly back into the admissible performance region.
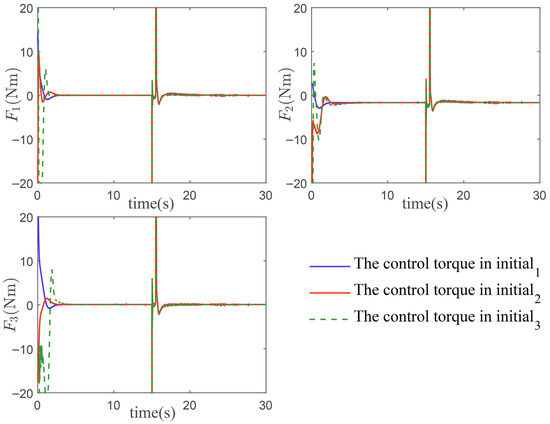
Figure 15.
The results of the control torque in Case 2.
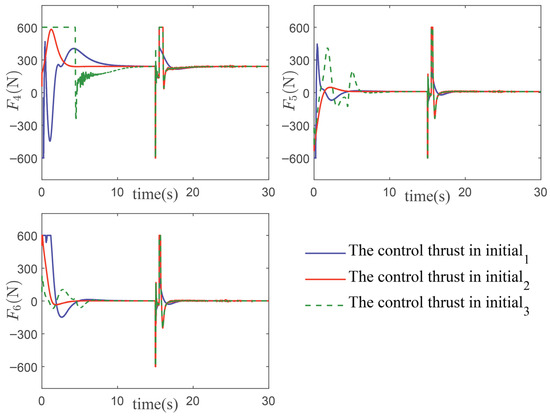
Figure 16.
The results of the control thrust in Case 2.
- Case 3. Superiority evaluation over current global PPC methods
In this case, the proposed global PPC approach is evaluated against two current global PPC methods to highlight its performance advantages. One of the comparison methods is constructed based on globally defined performance boundaries and is referred to as comparison method 1 [29], while the other relies on error transformation functions and is denoted as comparison method 2 [33]. The three global PPC schemes differ solely in the formulation of the unconstrained error variables, while the rest of the control architecture remains unchanged. Finally, the same set of control parameters is employed for all three methods, which are consistent with those listed in Table 3.
To mitigate potential singularities in the comparison methods arising from actuator saturation, Initial configuration 1 in Case 1 is selected as the initial condition, as it corresponds to relatively small configuration errors, given by:
In addition, relatively relaxed prescribed performance bounds are employed for the two comparison methods, respectively, as specified below:
Finally, the prescribed performance bounds adopted in the proposed PPC method are identical to those used in comparison method 2.
For a more intuitive visualization of the tracking error behavior, the following position and attitude error functions, denoted by and ,are introduced:
The results obtained from the simulations are shown in Figure 17 and Figure 18.
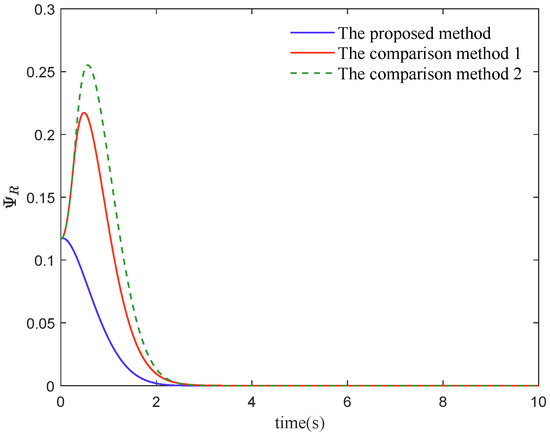
Figure 17.
The results of the attitude error under three methods.
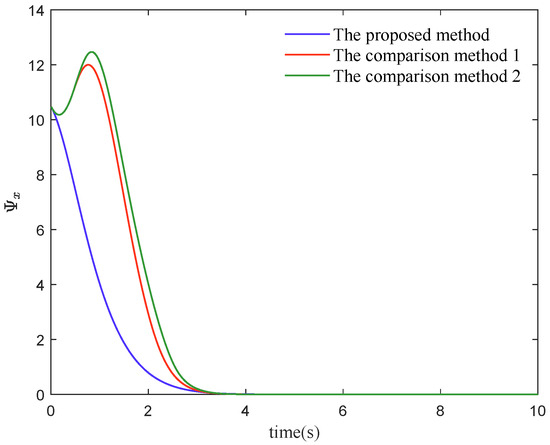
Figure 18.
The results of the position error under three methods.
The results indicate that the proposed method converges more rapidly than the comparison schemes, even when their potential singular behaviors are disregarded. This advantage is obtained despite the use of almost identical performance bounds and the same control parameters. Such behavior can be attributed to the structural limitations of conventional global PPC designs. In particular, when global performance functions are adopted, overly large initial bounds produce small normalized errors, which suppress the magnitude of the transformed error and reduce the transient response at the initial phase. A similar phenomenon is observed in tansfer-function-based approaches, where a very small initial shifting value yields a small auxiliary error, thereby limiting the transient response at the onset.
Furthermore, system performance is quantitatively assessed using two evaluation indices, namely the root mean square error (RMSE) and the total energy consumption of the control input (TECI), which are defined as follows [14]:
where the subscript k denotes the value of the state at the k-th sampling instant, and S represents the total number of sampling points. The RMSE and TECI results of the three control strategies are summarized in Table 5. The results indicate that the proposed method outperforms the two comparative schemes by attaining superior control accuracy with reduced control effort.
Table 5.
Comparison of RMSE and TECI for the three approaches.
For a stricter evaluation of the proposed approach, faster-decaying prescribed performance bounds are employed in place of those used previously. More specifically, the prescribed constraints associated with are refined and given by:
The results obtained from the simulations are shown in Figure 19, Figure 20, Figure 21, Figure 22, Figure 23 and Figure 24.
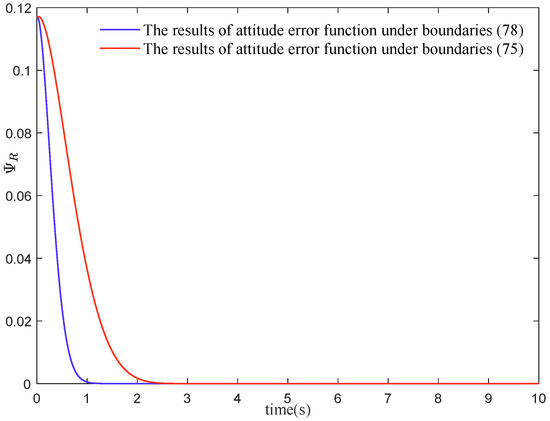
Figure 19.
Attitude errors of the presented PPC method under two different boundaries.
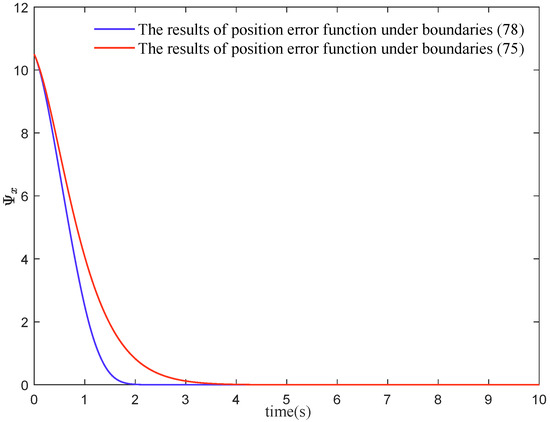
Figure 20.
Position errors of the presented PPC method under two different boundaries.
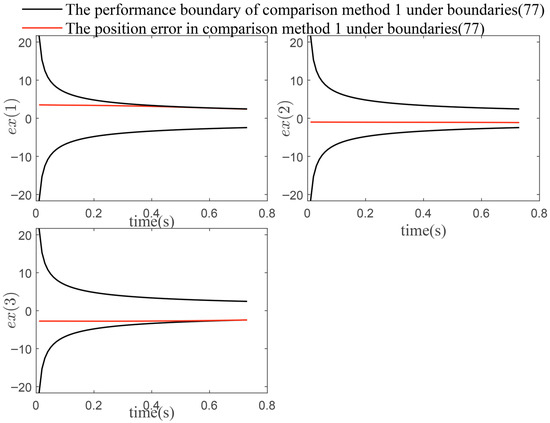
Figure 21.
The results of position error under comparison method 1 with boundaries (77).
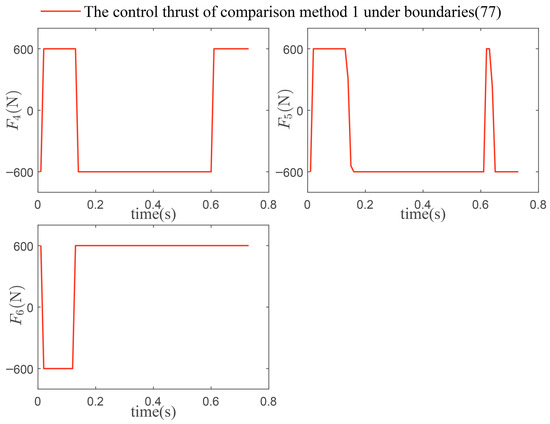
Figure 22.
The results of thrust under comparison method 1 with boundaries (77).
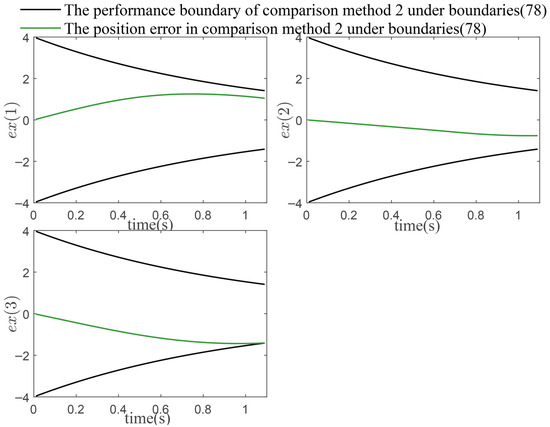
Figure 23.
The results of position error under comparison method 2 with boundaries (78).
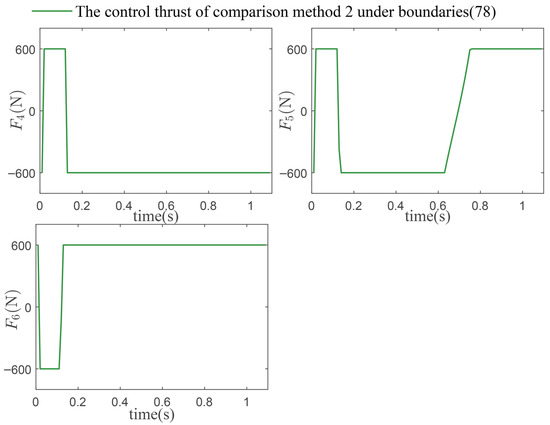
Figure 24.
The results of thrust under comparison method 2 with boundaries (78).
Figure 19 and Figure 20 present the tracking performance of the proposed control scheme under two different prescribed performance boundaries, while the simulation results of the two comparison methods under tightened performance constraints are depicted in Figure 21, Figure 22, Figure 23 and Figure 24. The simulation results further indicate that, as the prescribed performance boundaries are progressively tightened and more stringent convergence requirements are imposed, the proposed method exhibits enhanced convergence behavior. In contrast, owing to the inevitable occurrence of input saturation during the initial transient phase, the comparison methods encounter singularity issues in the course of system evolution, which ultimately result in the failure of the control task. These observations clearly indicate that, relative to current global PPC methods, the presented approach offers improved robustness, making it particularly well suited for implementation in realistic AUV scenarios.
6. Conclusions
In this paper, a unified globally nonsingular prescribed-time control scheme was proposed for AUVs under uncertainties and input saturation. The developed framework ensures that all error signals satisfy prescribed performance constraints while converging within a predefined time, thereby simultaneously achieving global stability, non-singularity, and time-guaranteed convergence. To overcome the inherent semi-globality and singularity limitations of classical prescribed performance control methods, a novel globally nonsingular PPC framework has been proposed. By introducing an innovative skew-mapping-based error transformation, the proposed approach fundamentally eliminates the occurrence of singularities and removes the restrictive requirement on the initial state, thereby enabling global applicability. A predefined-time disturbance observer has also been developed without assuming any prior knowledge of disturbance bounds, which enhances the robustness of the control system in uncertain marine environments. Furthermore, by integrating the proposed PPC strategy, disturbance observer, and saturation compensation mechanism within a backstepping-based predefined-time control framework, it has been rigorously established that all closed-loop error signals converge to an arbitrarily small neighborhood of the origin within a predefined time. Simulation results have demonstrated that the proposed method achieves superior tracking performance, improved transient behavior, and enhanced robustness compared with existing global PPC schemes, particularly under severe model uncertainties and input saturation. These advantages indicate that the proposed control framework provides a practical and reliable solution for high-performance AUV tracking in real-world applications.
Future research will focus on prescribed performance tracking control of AUVs in the presence of measurement noise, along with experimental validation on a prototype platform to further assess the feasibility and practical applicability of the proposed approach.
Author Contributions
K.A.: Methodology, Software, Writing, Formal analysis, Data curation, Visualization. Y.L.: Methodology Visualization. J.J.: Methodology Data curation. D.J.: Conceptualization, Supervision, Funding acquisition. All authors have read and agreed to the published version of the manuscript.
Funding
Project supported by Southern Marine Science and Engineering Guangdong Laboratory (Zhuhai) (Grant No. SML2024SP007), Department of Science and Technology of Guangdong Province (Grant No. 2025B1111130002), National Key Research and Development Program of China (Grant No. 2024YFB4710800, 2024YFB4710803, 2024YFB4710805), National Natural Science Foundation of China (Grant No. 52571375, U22A2012), the Development Programme Project of Heilongjiang Province (Grant No. GA20A402).
Data Availability Statement
No data was used for the research described in the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Liao, Y.; Zhang, T.; Yan, X.; Jiang, D. Integrated guidance and tracking control for underactuated AUVs on SE (3) with singularity-free global prescribed performance attitude control. Ocean Eng. 2025, 342, 122770. [Google Scholar] [CrossRef]
- Zhang, X.; Jiang, K. Backstepping-based adaptive control of underactuated AUV subject to unknown dynamics and zero tracking errors. Ocean Eng. 2024, 302, 117640. [Google Scholar] [CrossRef]
- Liao, Y.; An, K.; Sun, D.; Yan, X.; Jiang, D. An almost globally non-singularity prescribed performance tracking control scheme on SE (3) for AUVs with input saturation. Nonlinear Dyn. 2025, 113, 29263–29285. [Google Scholar] [CrossRef]
- Dai, L.; Zhang, D.; Wang, S.; Nie, G.; Zhu, X.; Wang, X. Trajectory Tracking Control of an Autonomous Underwater Vehicle Under Disturbance and Model Uncertainty. J. Mar. Sci. Eng. 2025, 13, 2210. [Google Scholar] [CrossRef]
- Er, M.J.; Gong, H.; Liu, Y.; Liu, T. Intelligent trajectory tracking and formation control of underactuated autonomous underwater vehicles: A critical review. IEEE Trans. Syst. Man Cybern. Syst. 2023, 54, 543–555. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Trajectory tracking control of AUVs via adaptive fast nonsingular integral terminal sliding mode control. IEEE Trans. Ind. Inform. 2019, 16, 1248–1258. [Google Scholar] [CrossRef]
- Liao, Y.; Yan, X.; An, K.; Wang, Z.; Zhang, T.; Wu, S.; Jiang, D. Fixed-time geometric tracking control of autonomous underwater vehicles on SE (3). Ocean Eng. 2024, 311, 118757. [Google Scholar] [CrossRef]
- Huang, H.; Tang, G.; Chen, H.; Wang, J.; Han, L.; Xie, D. Adaptive non-singular fixed-time sliding mode control of moving-base underwater flexible manipulators. Nonlinear Dyn. 2024, 112, 4409–4433. [Google Scholar] [CrossRef]
- Yang, X.; Yan, J.; Hua, C.; Guan, X. Trajectory tracking control of autonomous underwater vehicle with unknown parameters and external disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1054–1063. [Google Scholar] [CrossRef]
- Cao, H.; Li, Y.; Liu, C.; Zhao, S. ESO-based robust and high-precision tracking control for aerial manipulation. IEEE Trans. Autom. Sci. Eng. 2023, 21, 2139–2155. [Google Scholar] [CrossRef]
- Chen, P.; Yu, L.; Guo, K.; Qiao, L. Fast and Accurate Trajectory Tracking Control for Underactuated AUVs With Mismatched Disturbances: Theory and Experiment. IEEE Trans. Ind. Electron. 2025, 72, 8312–8321. [Google Scholar] [CrossRef]
- Cui, J.; Hou, M.; Peng, Z.; Wang, Y.; Cui, J.H. Hamiltonian based AUV navigation using adaptive finite-time trajectory tracking control. Ocean Eng. 2025, 320, 120329. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, W.; Du, X.; Li, Z. Fixed-Time Event-Triggered Sliding Mode Consensus Control for Multi-AUV Formation Under External Disturbances and Communication Delays. J. Mar. Sci. Eng. 2025, 13, 2294. [Google Scholar] [CrossRef]
- Liao, Y.; Luo, W.; Wang, Z.; Yan, X.; Li, S.; Zhang, T.; Jiang, D. Predefined-time disturbance estimation and tracking control for AUVs with actuator saturation on SE (3). Nonlinear Dyn. 2025, 113, 10191–10209. [Google Scholar] [CrossRef]
- Li, J.; Xiang, X.; Dong, D.; Yang, S. Prescribed time observer based trajectory tracking control of autonomous underwater vehicle with tracking error constraints. Ocean Eng. 2023, 274, 114018. [Google Scholar] [CrossRef]
- Qi, Z.; Liu, H.; Tian, X.; Yuan, J. Barrier function-based adaptive fixed-time ADLESN prescribed performance tracking control for UUVs with input saturation. Ocean Eng. 2024, 302, 117676. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, M.; Qin, H.; Wang, H.; Ding, Z. Full prescribed performance trajectory tracking control strategy of autonomous underwater vehicle with disturbance observer. ISA Trans. 2024, 151, 117–130. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, Y.; Yang, J.; Yan, Y.; Li, S. Prescribed performance motion control: A control barrier function approach. IEEE Trans. Ind. Electron. 2024, 71, 16377–16387. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, X.; Chen, Z.; Li, L. Adaptive event-triggered path tracking control with proximate appointed-time prescribed performance for autonomous ground vehicles. IEEE Trans. Ind. Electron. 2024, 72, 3092–3102. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. Neural network-based target tracking control of underactuated autonomous underwater vehicles with a prescribed performance. Ocean Eng. 2018, 167, 239–256. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Wang, S. Adaptive region tracking control with prescribed transient performance for autonomous underwater vehicle with thruster fault. Ocean Eng. 2020, 196, 106804. [Google Scholar] [CrossRef]
- Li, Y.; Shao, X.; Tong, S. Adaptive fuzzy prescribed performance control of nontriangular structure nonlinear systems. IEEE Trans. Fuzzy Syst. 2019, 28, 2416–2426. [Google Scholar] [CrossRef]
- Shi, Y.; Yi, B.; Xie, W.; Zhang, W. Enhancing prescribed performance of tracking control using monotone tube boundaries. Automatica 2024, 159, 111304. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, Y.; Qin, H.; Ouyang, L.; Jing, R. Predefined-time prescribed performance control for AUV with improved performance function and error transformation. Ocean Eng. 2023, 281, 114817. [Google Scholar] [CrossRef]
- Guo, Z.; Henry, D.; Gu, X.; Ygorra, S.; Cieslak, J.; Guo, J. Performance-guaranteed attitude tracking control for RLV: A finite-time PPC approach. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 5024–5034. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X.; Xue, L.; Liu, J.; Sun, C. Fixed-time control for distributed time-varying formation of autonomous surface vehicles with prescribed performance. Nonlinear Dyn. 2025, 113, 31479–31493. [Google Scholar] [CrossRef]
- Yong, K.; Chen, M.; Shi, Y.; Wu, Q. Flexible performance-based robust control for a class of nonlinear systems with input saturation. Automatica 2020, 122, 109268. [Google Scholar] [CrossRef]
- Gong, H.; Er, M.J.; Liu, Y. Fuzzy optimal fault-tolerant trajectory tracking control of underactuated auvs with prescribed performance in 3-D space. IEEE Trans. Syst. Man Cybern. Syst. 2025, 55, 170–182. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y.; Chen, C.P.; Chen, L. Adaptive asymptotic tracking with global performance for nonlinear systems with unknown control directions. IEEE Trans. Autom. Control. 2021, 67, 1566–1573. [Google Scholar] [CrossRef]
- Zhang, C.L.; Guo, G. Prescribed performance sliding mode control of vehicular platoons with input delays. IEEE Trans. Intell. Transp. Syst. 2024, 25, 11068–11076. [Google Scholar] [CrossRef]
- Liu, G.; Park, J.H.; Xu, H.; Hua, C. Reduced-order observer-based output-feedback tracking control for nonlinear time-delay systems with global prescribed performance. IEEE Trans. Cybern. 2022, 53, 5560–5571. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Zhao, K.; Song, Y.; Lewis, F.L. On the uniformness of full-state error prescribed performance for strict-feedback systems. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 3022–3031. [Google Scholar] [CrossRef]
- Gao, Z.; Sun, Z.; Guo, G. Adaptive predefined-time tracking control for vehicular platoons with finite-time global prescribed performance independent of initial conditions. IEEE Trans. Veh. Technol. 2024, 73, 16254–16267. [Google Scholar] [CrossRef]
- Yin, H.; Wang, N.; Zhang, Z. Prescribed performance nonholonomic trajectory-tracking control of uncertain mechanical systems: A transformation-free approach. Nonlinear Dyn. 2025, 113, 3421–3437. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, J.; Li, J.; Liu, B. Improved prescribed performance control for nonaffine pure-feedback systems with input saturation. Int. J. Robust Nonlinear Control 2019, 29, 1769–1788. [Google Scholar] [CrossRef]
- Fotiadis, F.; Rovithakis, G.A. Input-constrained prescribed performance control for high-order MIMO uncertain nonlinear systems via reference modification. IEEE Trans. Autom. Control 2023, 69, 3301–3308. [Google Scholar] [CrossRef]
- Sanyal, A.; Nordkvist, N.; Chyba, M. An almost global tracking control scheme for maneuverable autonomous vehicles and its discretization. IEEE Trans. Autom. Control 2010, 56, 457–462. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Xie, S.; Chen, Q. Predefined-time disturbance estimation and attitude control for rigid spacecraft. IEEE Trans. Circuits Syst. II Express Briefs. 2023, 71, 2089–2093. [Google Scholar] [CrossRef]
- Sun, Z.; Hua, C. Logic-based fixed-time control for uncertain nonlinear systems with unknown control directions. IEEE Trans. Cybern. 2024, 54, 5337–5346. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R.; Zheng, S.; Dong, S.; Sun, G. Fixed-time disturbance observer-based robust fault-tolerant tracking control for uncertain quadrotor UAV subject to input delay. Nonlinear Dyn. 2022, 107, 2363–2390. [Google Scholar] [CrossRef]
























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.