Abstract
This study experimentally investigates the performance and exhaust emission characteristics of a low-speed two-stroke marine diesel engine operated with different controllable pitch propeller (CPP) modes during actual sea operation. Full-scale measurements were conducted on the training vessel T/S Baek-Kyung, equipped with a MAN B&W 5S35ME-B9.5 engine, operating under IMO Tier II fallback (FB) conditions. Two CPP control strategies were compared: a constant-speed mode, in which engine speed was maintained at approximately 162 rpm and load was controlled by propeller pitch, and a combinator mode, in which engine speed and pitch were jointly controlled. In the combinator mode, the propeller pitch reached saturation (100%) at approximately 25% load, and further load variation was governed primarily by engine speed. The analysis focused on an engine-load range of approximately 25–75% SMCR and evaluated propulsion performance, including specific fuel oil consumption (SFOC) and shaft torque, together with estimated brake-specific exhaust emissions expressed in g/kWh. The combinator mode achieved superior fuel efficiency under partial-load conditions, reducing SFOC by up to 10.5 g/kWh (5.4%) at 25% load, while increasing shaft torque by up to 47%, indicating improved engine–propeller matching. However, this benefit was accompanied by higher estimated emissions at low load, with BSNOx increasing from 13.61 to 16.95 g/kWh. As engine load increased, differences in both performance and emissions between the two modes diminished. These results reveal a clear load-dependent trade-off between fuel efficiency and exhaust emissions in CPP operation and emphasize the importance of load-based switching or optimal joint control strategies under off-design conditions.
1. Introduction
The maritime industry is facing increasing pressure to reduce atmospheric emissions and improve energy efficiency as part of global decarbonization efforts. Recent studies have highlighted the environmental, health, and societal impacts of ship exhaust emissions, emphasizing the urgent need for practical and effective mitigation strategies for nitrogen oxides (NOx) and carbon dioxide (CO2) generated by marine diesel engines [1]. In parallel, the International Maritime Organization (IMO) has introduced a series of energy-efficiency-related regulations and guidelines, including the Energy Efficiency Design Index (EEDI), the Energy Efficiency Existing Ship Index (EEXI), and the Carbon Intensity Indicator (CII), which collectively encourage ship operators to pursue both technological and operational measures to reduce fuel consumption and greenhouse gas emissions throughout a vessel’s lifecycle [2,3,4]. Within this regulatory framework, propulsion system optimization has emerged as one of the most feasible approaches for improving energy efficiency in existing ships without extensive structural modifications.
Under such conditions, the interaction between the main engine and the propeller has gained renewed importance. Engine–propeller matching directly determines the achievable ship speed, propulsion efficiency, and specific fuel oil consumption (SFOC), particularly for vessels operating under variable loading conditions, slow steaming, or adverse sea states [5]. For large two-stroke marine diesel engines, which are traditionally optimized for steady operation near their design point, deviations from the nominal operating condition can lead to unfavorable load distribution and reduced efficiency. Recent research has shown that accurate prediction of engine performance under changing operating conditions is essential for optimizing fuel consumption and maintaining safe operating margins in two-stroke engines [6]. Consequently, propulsion systems are increasingly viewed as integrated control systems rather than independent mechanical components.
In this context, controllable pitch propellers (CPPs) offer distinct operational advantages over conventional fixed pitch propellers (FPPs). By allowing continuous adjustment of blade pitch, CPPs enable flexible control of thrust while decoupling propulsion demand from engine rotational speed. This flexibility enhances maneuverability, facilitates low-speed operation, and allows redistribution of engine load under off-design and part-load conditions. Previous studies on adaptive pitch control and hybrid propulsion systems have demonstrated that coordinated control of propeller pitch and engine parameters can lead to improved propulsion efficiency and reduced fuel consumption across a wide operating envelope [7]. Moreover, advanced numerical models have confirmed that accurate representation of engine–propeller coupling is critical for predicting propulsion performance, particularly when pitch variation is actively employed under wave-induced load fluctuations [8].
Operationally, CPP systems are commonly controlled using two principal strategies: combinator mode and constant-speed mode. In combinator mode, propeller pitch and engine speed are simultaneously adjusted according to predefined control curves to maintain favorable operating conditions for both the engine and the propeller. Optimization studies have reported that well-designed pitch–rpm schedules in combinator mode can significantly reduce fuel consumption compared with conventional control strategies, especially under variable operational profiles [9]. Conversely, in constant-speed mode, the engine operates at a fixed rotational speed while thrust is regulated solely through pitch variation. Although this mode offers advantages for maintaining stable auxiliary power generation and simplifying shaft-generator integration, it may result in suboptimal engine loading and increased SFOC if not carefully managed [10]. Experimental and numerical investigations have further shown that inappropriate pitch scheduling can lead to excessive engine loading, reduced propulsion efficiency, and degraded engine performance [11].
With the increasing adoption of hybrid propulsion concepts, the role of CPPs has expanded further. Several recent studies have demonstrated that integrating CPPs with hybrid energy management strategies can enhance overall system efficiency and operational flexibility, particularly for vessels experiencing frequent load fluctuations [12]. In addition, novel hull–engine–propeller matching approaches have been proposed to improve propulsion performance for next-generation ship designs incorporating advanced propulsor configurations [13]. From an environmental perspective, CPP operation also indirectly influences exhaust emission formation, as changes in engine load, combustion pressure, and air–fuel ratio affect NOx and CO2 generation mechanisms [14,15,16].
Despite these potential advantages, the application of CPPs to large two-stroke low-speed diesel engines remains limited. Historically, CPPs have been more widely adopted in four-stroke medium-speed engine applications, where frequent speed changes and high maneuverability are required. In contrast, two-stroke engines exhibit strong sensitivity to rotational speed variations and are governed by a pronounced propeller load law, making precise pitch–rpm coordination technically challenging. While the application of controllable pitch propellers to two-stroke low-speed diesel engines offers enhanced operational flexibility and potential fuel savings under off-design and part-load conditions, it simultaneously introduces challenges related to increased control complexity, sensitivity to propeller load characteristics, and the limited availability of full-scale validation data.
Although experimental investigations on various vessel types, including general cargo ships and repowered fishing vessels, have contributed to a broader understanding of engine–propeller matching under specific operating scenarios [17,18,19], empirical studies focusing on CPP-equipped low-speed two-stroke engines under actual sea-going conditions remain limited. Therefore, additional full-scale onboard measurements are still needed to clarify the performance–emission trade-offs associated with CPP control strategies. However, such datasets are still extremely limited, underscoring the need for further experimental validation.
To address this gap, the present work investigates how CPP control strategy influences engine performance and exhaust characteristics during real ship operation. Using sea-trial data obtained under Tier II FB conditions, the study examines load-dependent trends in SFOC, torque response, combustion and boosting indicators, and exhaust temperatures, together with NOx and CO levels. By comparing constant-speed and combinator control over representative load windows, this study provides full-scale evidence that supports practical selection of CPP control strategies for improved operational efficiency while recognizing emissions constraints.
2. Materials and Methods
2.1. Materials
The experiments were conducted on the training vessel T/S Baek-Kyung, which served as the test platform for full-scale sea-trial measurements. The vessel particulars are summarized in Table 1, and an overall view is provided in Figure 1. These characteristics ensure that the recorded performance and emissions reflect representative full-scale operation rather than laboratory or simplified test conditions.

Table 1.
Principal particulars of the training vessel T/S Baek-Kyung used for the full-scale sea-trial campaign.

Figure 1.
Training vessel T/S Baek-Kyung used for full-scale sea-trial measurements.
The vessel is a fishery training ship with a gross tonnage of 3998 tons and a net tonnage of 1199 tons, designed for long-term educational and experimental operation under stable propulsion conditions. With an overall length of 97.00 m, a length between perpendiculars of 85.00 m, a breadth of 15.40 m, and a design draft of 5.30 m, as summarized in Table 1, the vessel provides sufficient displacement and hydrodynamic stability for controlled engine performance and emission measurements during sea trials.
The service speed of approximately 15.27 knots at 80% MCR and 15% sea margin, also listed in Table 1, represents a typical operational condition for medium-load propulsion, which is particularly relevant for evaluating the effects of CPP operating modes under realistic sea-going conditions.
These vessel particulars ensure that the measured engine performance and exhaust emission data reflect representative full-scale operating characteristics rather than laboratory-scale or simplified test conditions.
The experimental study was conducted on the main propulsion engine of the training vessel T/S Baek-Kyung, operated by Pukyong National University. An overview of the main engine installation is shown in Figure 2.
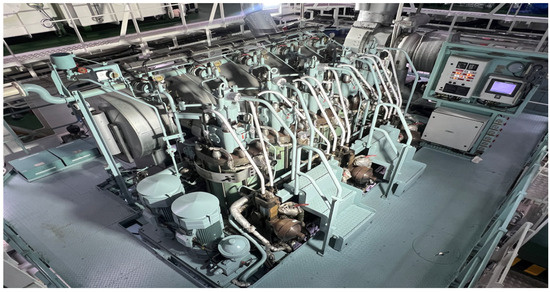
Figure 2.
Main propulsion engine installed on the T/S Baek-Kyung.
The main propulsion engine is a low-speed, two-stroke, electronically controlled diesel engine (MAN B&W 5S35ME-B9.5) operated under Tier II fallback conditions. The engine drives a controllable pitch propeller via direct coupling. While the CPP system supports multiple operating modes (e.g., constant-speed, combinator, and separator modes depending on the control architecture), this study focuses on a controlled comparison between constant-speed and combinator operation under comparable sea-trial load conditions. The specifications of the main propulsion engine are summarized in Table 2.
Table 2.
Key technical specifications of the main propulsion engine (MAN B&W 5S35ME-B9.5) considered in this study.
The T/S Baek-Kyung is equipped with a CPP propulsion system designed to regulate thrust by varying the blade pitch while maintaining a constant direction of shaft rotation. The propulsion system is operated by the Alphatronic 3000 control platform (MAN Energy Solutions SE, Augsburg, Germany), which integrates engine speed and propeller pitch control to accommodate different operating requirements during navigation. The main specifications of the propulsion system, including the CPP model VBS940, propeller diameter 3800 mm, nominal propeller speed 167 rpm, and pitch movement range, are summarized in Table 3.
Table 3.
Main CPP propulsion system parameters and control configuration installed on T/S Baek-Kyung.
During routine navigation, propulsion commands are issued from the bridge, and the CPP plant is typically operated in combinator control. In this strategy, propeller pitch and engine speed are coordinated along a predefined schedule (Figure 3) to satisfy thrust demand over the operating range. At low demanded power, pitch is increased quickly to secure thrust while the engine remains at relatively low rpm, which is advantageous for low-speed propulsion efficiency. As the demanded power rises, pitch change becomes less dominant and the required output is achieved mainly by increasing rotational speed, supporting stable power delivery toward higher loads.
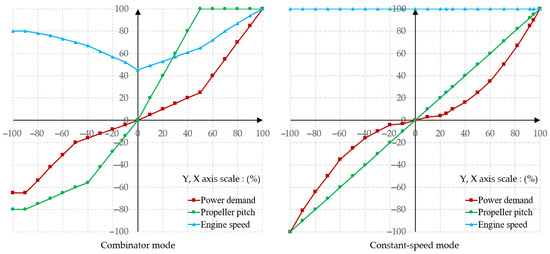
Figure 3.
Representative speed–pitch operating characteristics for the two CPP control strategies.
For comparison, the CPP system can be set to constant-speed control, where the engine is maintained at a selected rpm setpoint after startup and stabilization. Under this mode, propulsion power is regulated primarily through manual pitch adjustment using the control lever, with engine speed held approximately constant.
The different operating characteristics of combinator and constant-speed control on the T/S Baek-Kyung are summarized in Figure 3, which illustrates how power demand is realized through distinct pitch–rpm relationships in each mode.
Figure 4 illustrates the shipboard Engine Local Area Network (LAN) architecture used for integrated monitoring, control, and data acquisition during sea operation. The EMS/ECS main operating panels and the PMI data acquisition unit are interconnected via a managed ethernet switch, enabling synchronized logging of control parameters and high-resolution combustion pressure data. This configuration supports reliable data exchange without interfering with core engine control functions.
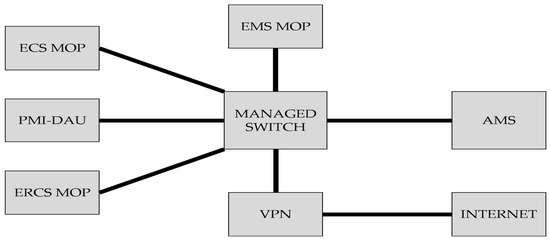
Figure 4.
Engine LAN architecture for synchronized acquisition of engine control parameters and combustion-pressure data.
The fuel oil used in experiment is summarized in Table 4.
Table 4.
Fuel properties of the marine gas oil (MGO) used during the sea-trial measurements.
Exhaust gas concentrations were acquired on board using a NOVA prime portable analyzer (MRU GmbH, Neckarsulm-Obereisesheim, Germany). The unit is certified for relevant applications under the EU MCP Directive (2015/2193) and was selected to support field measurements in large combustion systems, including marine diesel-engine operation.
The analyzer employs a dual-sensing architecture. Electrochemical channels were used for O2, CO, NO, NO2, SO2, and H2S, while non-dispersive infrared (NDIR) channels were used for CO, CO2, and total hydrocarbons (HC). The electrochemical cells produce concentration-dependent electrical outputs governed by diffusion-controlled reactions, whereas the NDIR channels quantify target species from their infrared absorption response. For shipboard campaigns requiring stable signals over extended periods, the NDIR channels are advantageous in terms of long-term stability and reduced routine maintenance.
To improve sample quality and protect the sensing elements during extended measurements, the NOVA prime was operated with integrated sample-conditioning functions. Moisture was removed via a Peltier-based cooling stage, and the sample stream was passed through high-efficiency filtration. Condensate was automatically drained, and the instrument monitored key sampling indicators (e.g., flow and humidity) to maintain consistent measurement conditions despite variable ambient environments.
Measurement control and logging were performed through the onboard touchscreen interface. The system provides real-time display of measured variables and allows configuration of relevant settings (e.g., fuel-property inputs and O2 reference selection). Data were stored internally (up to 1000 datasets) and exported in CSV format via USB or LAN for subsequent post-processing.
The specified operating ambient range is +5 °C to +45 °C. Typical stated performance includes ±0.2% for O2 over 0–25.00%, ±0.3% for CO2 over 0–40.00%, and ±5 ppm for NOx over 0–5000 ppm; the measurement ranges and nominal accuracies are summarized in Table 5.
Table 5.
Measurement ranges and nominal accuracies of the NOVA prime exhaust gas analyzer channels used in this study.
During the sea-trial campaign, the analyzer was installed close to the exhaust sampling point (Figure 5) to minimize transport delay and reduce the likelihood of dilution or lag effects. This layout supported representative sampling for NOx, CO2, and the other measured exhaust components under both stabilized and transient operating conditions.
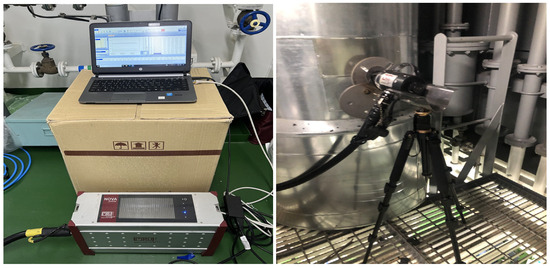
Figure 5.
NOVA prime portable exhaust gas analyzer setup used for on-site measurement of marine diesel engine emissions during the experimental procedure.
Quality assurance included routine verification and an uncertainty evaluation. Before each measurement series, the analyzer response was checked using certified calibration gases to confirm agreement with reference concentrations. The overall uncertainty was then assessed in line with ISO 8178 [20] and the IMO NOx Technical Code (2008) [21], considering analyzer accuracy, calibration-gas tolerance, and sampling repeatability. From this assessment, the expanded uncertainty of NOx at a 95% confidence level was confirmed to be within ±3% for the comparative sea-trial analysis.
2.2. Methods
The experimental investigation was conducted during actual sea operation of the T/S Baek-Kyung to compare the performance and exhaust characteristics of the main engine under two CPP operating modes. All measurements were performed under Tier II fallback (FB) conditions, and the analysis focused exclusively on differences arising from the propulsion control strategy rather than changes in engine hardware or regulatory mode.
In this study, the engine load (%) denotes the load indication referenced to the specified maximum continuous rating (SMCR) of the main engine, as displayed by the engine control/monitoring system. During navigation, the CPP system was alternately operated in constant-speed mode and combinator mode (Table 6). In constant-speed mode, the engine speed was maintained at approximately 162 rpm (note that 167 rpm corresponds to 100% speed setting; however, 162 rpm was selected to mitigate hull vibration), and the target engine loads (≈75%, 55%, 45%, and 25% SMCR-based load) were achieved by adjusting the CPP pitch command. Accordingly, within the constant-speed mode, load variation was induced mainly by CPP pitch adjustment under near-constant engine speed, which reduces confounding from rpm fluctuations when interpreting load-dependent trends.
Table 6.
Test conditions during sea operation of T/S Baek-Kyung (engine load referenced to SMCR as indicated by the engine monitoring system). Note: In combinator mode, the stabilized mid-load points were 47% and 54% (within ±2% of the nominal 45% and 55% targets).
In combinator mode, the operating points were also defined using the SMCR-referenced load indication. However, the propeller pitch reached its upper limit (100% pitch) at approximately 25% load; beyond this point, further increases in load were achieved primarily through changes in engine speed rather than additional pitch increase. Therefore, above ~25% load in combinator operation, the load response is governed predominantly by rpm variation, whereas the pitch contribution becomes limited.
To interpret the propulsion response in the pitch-saturated combinator region (CPP pitch = 100%), a propeller-law reference was introduced and compared with the measured data. In the saturated region (25/47/54/75% load), the propeller loading is expected to be dominated by shaft speed, and the theoretical scaling can be expressed as and , where is the shaft torque, is the shaft power, and is the engine (shaft) speed. Using a selected operating point as a normalization reference (, , ; here, the 54% load point), the reference curves were constructed as:
In Figure 6c, the measured combinator-mode shaft torque and the derived shaft power were plotted against engine speed and overlaid with the normalized propeller-law references to provide a physics-based comparison baseline in the pitch-saturated range. In addition, to visualize the “optimized joint control” behavior in the engine-speed domain, Figure 6d rearranges the operating points of both CPP modes by engine speed and compares their corresponding shaft torque and power trajectories, highlighting how combinator control forms a continuous speed-dependent operating path, while constant-speed control concentrates at a near-fixed speed with pitch-driven load variation.
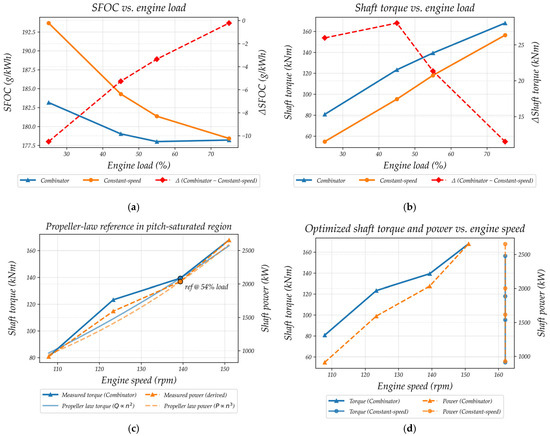
Figure 6.
Propulsion and fuel performance characteristics under different CPP operating modes. Comparison between constant-speed and combinator CPP operating modes: (a) specific fuel oil consumption (SFOC) and corresponding ΔSFOC (combinator − constant-speed) as a function of engine load; (b) shaft torque and corresponding ΔShaft torque (combinator − constant-speed) as a function of engine load; (c) propeller-law reference comparison in the pitch-saturated region (pitch = 100%), showing measured shaft torque and derived shaft power in the combinator mode together with theoretical propeller-law references and , normalized at 54% load; (d) shaft torque and power versus engine speed for constant-speed and combinator CPP modes, illustrating distinct operating trajectories and engine–propeller matching characteristics. Note: The combinator mid-load points stabilized at 47% and 54% (Table 6) and are discussed/plotted against the nominal 45% and 55% targets for readability.
For each load condition, data acquisition started after the exhaust gas temperature reached a stable level, which was used as the practical stabilization criterion during sea operation. After stabilization, combustion parameters and exhaust gas concentrations were continuously recorded, and the representative values reported in this study correspond to the mean of an approximately 7 min steady segment at each load. The same measurement instruments and data-processing procedures were applied for both CPP modes to ensure consistency and comparability across operating conditions.
The measurements were conducted during routine sea operation; therefore, the target engine-load points were obtained at different dates and time windows for each CPP operating mode. To minimize the influence of maneuvering and external disturbances, only quasi-steady straight-course segments were selected based on stable engine load and CPP settings, while turning and transient periods were excluded.
To support transparency and reproducibility of the full-scale sea-going dataset, the corresponding navigation and environmental conditions recorded from the ship log—wind direction/force, sea-state notation, atmospheric pressure, and course—are summarized in Table 7 for both the combinator and constant-speed modes. As shown in Table 7, all analyzed segments were obtained under straight-course conditions, while wind/sea-state variations reflect realistic sea-going operation. The following sections present the load-dependent combustion and exhaust responses based on these filtered steady segments.
Table 7.
Summary of navigation and environmental conditions during selected steady straight-course segments for each CPP operating mode. Note: Weather conditions during the sea trials are indicated using simplified codes. E: East, N: North, S: South, SE: South–East; bc: clear; c: cloudy; f: fog; d: drizzling rain.
Since the exhaust mass-flow rate was not directly measured during the sea trials, brake-specific emissions were additionally estimated to enable a work-normalized comparison between CPP modes. The estimation used the measured dry concentrations together with the measured fuel oil consumption (FOC, kg/h) and shaft power (kW), applying a carbon-balance-based approximation with an assumed fuel carbon mass fraction of = 0.85 (fuel certificate unavailable).
where is the fuel oil consumption (kg/h), is the assumed carbon mass fraction of the fuel (–), is the molar mass of carbon (12 g/mol), denotes the dry mole fraction of species i (CO2 in %, CO and NOx in ppm), is the molar mass of nitrogen dioxide (46 g/mol), and is the shaft power (kW).
Because direct exhaust mass-flow measurements, full exhaust speciation (e.g., THC), and fuel elemental analysis were not available during the sea trials, the brake-specific emissions are presented as estimates based on the carbon-balance approach with the assumed value.
3. Results
3.1. Propulsion and Fuel Performance Characteristics Under CPP Operating Modes
Figure 6 compares the fuel consumption and propulsion characteristics of the two CPP operating modes as a function of engine load. Figure 6a illustrates the variation of specific fuel oil consumption (SFOC), while Figure 6b presents the corresponding shaft torque. The stabilized operating points for the combinator mode occurred at 47% and 54% load, which were within ±2% of the nominal mid-load targets (45% and 55%). Accordingly, these points were treated as representative mid-load conditions for comparative analysis.
Across the investigated load range (approximately 25–75%), the combinator mode consistently exhibited lower SFOC than the constant-speed mode. At low and medium loads, the reduction in SFOC was particularly pronounced. Specifically, the SFOC decreased from 193.7 to 183.2 g/kWh at 25% load, corresponding to a reduction of 10.5 g/kWh (5.4%), while reductions of 5.3 g/kWh (2.9%) and 3.4 g/kWh (1.8%) were observed at 45% and 55% load, respectively. In contrast, the SFOC difference at 75% load was negligible (0.2 g/kWh), indicating that the fuel-efficiency benefit of the combinator mode diminishes toward high-load operation. The ΔSFOC curve included in Figure 6a further highlights this load-dependent behavior, clearly confirming that the maximum fuel-saving effect occurs under partial-load conditions and progressively decreases as engine load increases.
Simultaneously, Figure 6b shows that the shaft torque generated in the combinator mode was higher than that in the constant-speed mode at all load points. The shaft torque increase reached 25.97 kNm (approximately 47%) at 25% load and 28.03 kNm (29%) at 45% load, while still remaining significant at higher loads with increases of 21.35 kNm (18%) at 55% load and 11.52 kNm (7%) at 75% load. The corresponding ΔShaft torque curve confirms that the relative torque advantage of the combinator mode is greatest at low loads and gradually diminishes with increasing load.
To interpret whether the combinator-mode behavior is consistent with fundamental propeller scaling in the pitch-saturated region (pitch = 100%), Figure 6c compares the measured shaft torque and the derived shaft power with theoretical propeller-law references, and , normalized at the reference point of 54% load. In this region (25/47/54/75% load), the measured trends follow the theoretical scaling reasonably well, supporting that once pitch saturation is reached, the propulsion system behavior is primarily governed by rotational-speed-dependent propeller loading. This theoretical consistency provides a physical basis for using propeller-law references as a comparison baseline when evaluating combinator-mode performance under off-design conditions.
Building on this physical basis, Figure 6d reorganizes the same propulsion response in the engine-speed domain and directly contrasts the torque–power trajectories between combinator and constant-speed operation. Under combinator control, shaft torque and power increase monotonically with engine speed, forming a continuous operating trajectory that represents coordinated adjustment of speed-dependent propeller loading. In contrast, under constant-speed control, engine speed remains nearly fixed by design; therefore, torque and power appear as vertically distributed levels at approximately one speed rather than forming a distinct trajectory. This contrast clarifies that the combinator mode provides an extended operating freedom in the speed–load relationship, which is consistent with improved engine–propeller matching. Together with Figure 6a,b, the concurrent reduction in SFOC and increase in shaft torque indicate that the combinator mode improves overall propulsive efficiency, particularly under partial-load operation, rather than merely shifting the engine operating point.
The combinator mode exhibits reduced SFOC and increased shaft torque, particularly under partial-load conditions, indicating improved propulsive efficiency and enhanced engine–propeller matching.
3.2. In-Cylinder Combustion Behavior and Thermal Characteristics
Figure 7 compares the in-cylinder combustion and thermal characteristics between CPP modes. Because the stabilized sea-operation points under each CPP mode did not coincide perfectly with the nominal target loads (typically within ±2%), the comparisons are discussed on a comparable-load-region basis (e.g., 45–47% and 54–55%). At comparable nominal loads, the combinator mode showed a clear increase in indicated work, as reflected by the mean indicated effective pressure (MIEP). Specifically, MIEP increased from 0.51 to 0.71 MPa at 25% load (Δ = +0.20 MPa, +40.20%), from 0.85 to 1.08 MPa at 45% load (Δ = +0.23 MPa, +26.90%), and from 1.04 to 1.22 MPa at 55% load (Δ = +0.18 MPa, +16.80%). At 75% load, the difference became smaller, with MIEP increasing from 1.37 to 1.46 MPa (Δ = +0.09 MPa, +6.70%). This load-dependent increase in MIEP is consistent with the concurrent rise in shaft torque observed in Figure 6b, confirming that the propulsive improvement under combinator operation is supported by higher in-cylinder indicated work.
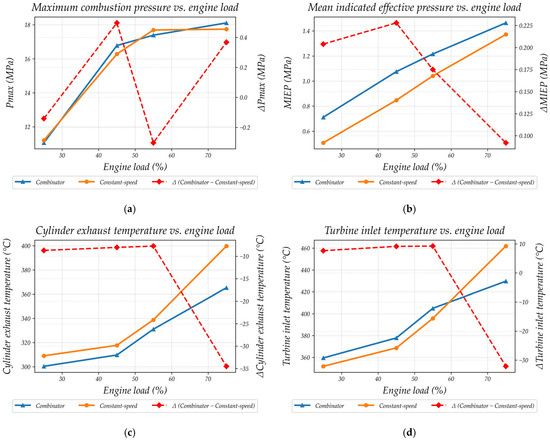
Figure 7.
In-cylinder combustion and thermal characteristics. Variations in in-cylinder combustion and thermal parameters with engine load under constant-speed and combinator CPP operating modes: (a) maximum combustion pressure (Pmax) and corresponding ΔPmax, (b) mean indicated effective pressure (MIEP) and corresponding ΔMIEP, (c) cylinder exhaust gas temperature and corresponding ΔCylinder exhaust gas temperature, (d) turbine inlet temperature and corresponding ΔTurbine inlet temperature.
The ΔMIEP curve included in Figure 7b clearly indicates that the enhancement in indicated work under combinator operation is most pronounced at partial loads and gradually decreases as engine load increases, consistent with the torque trends observed in Figure 6b.
In contrast, the maximum combustion pressure (Pmax) changed only moderately between modes. Pmax decreased from 11.200 to 11.060 MPa at 25% load (Δ = −0.141 MPa, −1.30%), increased from 16.280 to 16.780 MPa at 45% load (Δ = +0.497 MPa, +3.10%), decreased from 17.700 to 17.390 MPa at 55% load (Δ = −0.303 MPa, −1.70%), and increased from 17.740 to 18.110 MPa at 75% load (Δ = +0.368 MPa, +2.10%). Overall, despite the substantial increase in MIEP at partial loads, the peak-pressure penalty remained within approximately ±0.50 MPa across the tested range.
Thermal trends further support the interpretation that combinator operation improved the work extraction balance. The cylinder exhaust temperature was consistently lower in the combinator mode by 8.70 °C at 25%, 8.03 °C at 45%, and 7.74 °C at 55%, and the reduction became much larger at 75% load (from 399.76 °C to 365.27 °C, Δ = −34.49 °C, −8.60%). Similarly, the turbine inlet temperature increased slightly at low–medium loads (by +7.65 °C at 25%, +9.14 °C at 45%, and +9.23 °C at 55%) but decreased notably at 75% load (from 461.92 °C to 429.77 °C, Δ = −32.15 °C, −7.00%).
Taken together, the marked MIEP increase (up to +40.20%) combined with only limited Pmax changes (within ±0.50 MPa) and reduced exhaust-side temperatures indicates that the performance gain under combinator control is primarily driven by improved indicated work and altered heat/work partitioning, rather than a simple intensification of peak combustion severity.
The ΔMIEP trend highlights enhanced indicated work under combinator operation, while Pmax variations remain limited, indicating improved combustion effectiveness without excessive peak-pressure increase.
3.3. Boosting and Exhaust-System Response
Figure 8 summarizes the boosting and exhaust-system response under the two CPP modes. The scavenge air pressure showed relatively small differences at low and medium loads but diverged at high load. The scavenge air pressure decreased from 0.068 to 0.061 MPa at 25% load (Δ = −0.007 MPa, −10.3%) and from 0.179 to 0.169 MPa at 55% load (Δ = −0.010 MPa, −5.6%), while it increased slightly at 45% load (from 0.135 to 0.142 MPa, Δ = +0.007 MPa, +5.2%). At 75% load, the combinator mode produced a much lower scavenge air pressure of 0.213 MPa compared to 0.263 MPa in constant-speed operation (Δ = −0.050 MPa, −19.0%).
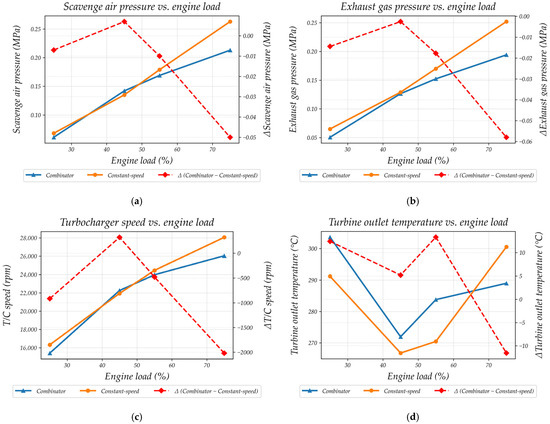
Figure 8.
Boosting and exhaust-system response. Boosting and exhaust-system responses as a function of engine load for the two CPP operating modes: (a) scavenge air pressure and corresponding ΔScavenge air pressure, (b) exhaust gas pressure and corresponding ΔExhaust gas pressure, (c) turbocharger rotational speed (T/C speed) and corresponding ΔT/C speed, (d) turbine outlet temperature and corresponding ΔTurbine outlet temperature.
The ΔScavenge air pressure curve emphasizes that the reduction in scavenge pressure under combinator operation becomes more pronounced as engine load increases, suggesting a load-dependent redistribution of the air–fuel matching strategy.
The exhaust gas pressure was lower in the combinator mode at all loads when compared on a consistent MPa basis. The exhaust gas pressure decreased from 0.0650 to 0.0505 MPa at 25% load (Δ = −0.0145 MPa, −22.2%), from 0.1290 to 0.1265 MPa at 45% load (Δ = −0.0025 MPa, −2.0%), from 0.1700 to 0.1523 MPa at 55% load (Δ = −0.0177 MPa, −10.4%), and from 0.2520 to 0.1940 MPa at 75% load (Δ = −0.0580 MPa, −23.0%).
Turbocharger speed (T/C speed) exhibited modest, load-dependent shifts. The combinator mode increased T/C speed slightly at 45% load (from 21,941 to 22,262 rpm, Δ = +321 rpm, +1.5%) but reduced it at 25% load (Δ = −916 rpm, −5.6%), at 55% load (Δ = −478 rpm, −2.0%), and at 75% load (from 28,062 to 26,043 rpm, Δ = −2019 rpm, −7.2%). The turbine outlet temperature likewise showed mixed behavior: it increased at 25–55% loads (by +12.43 °C, +5.17 °C, and +13.32 °C, respectively) but decreased at 75% load (from 300.53 °C to 288.98 °C, Δ = −11.55 °C, −3.8%).
Overall, the boosting/exhaust response under combinator control was characterized by reduced exhaust pressure (up to −23%) and a lower scavenge pressure at high load (−0.050 MPa at 75%), alongside only moderate changes in turbocharger speed (within roughly −7% to +2%). These quantified shifts indicate that the propulsive and fuel-efficiency gains observed in Section 3.1 are accompanied by a rebalanced boosting/exhaust operating point, which provides an essential system-level basis for interpreting the emission trade-offs reported in Section 3.4.
The combinator mode is characterized by reduced exhaust back pressure and moderated scavenge pressure at high load, accompanied by only modest changes in turbocharger operating conditions.
3.4. Exhaust Emission Characteristics and Trade-Off Analysis
Figure 9 presents the load-dependent variations in major exhaust gas components, including NOx, CO, O2, and CO2 concentrations.
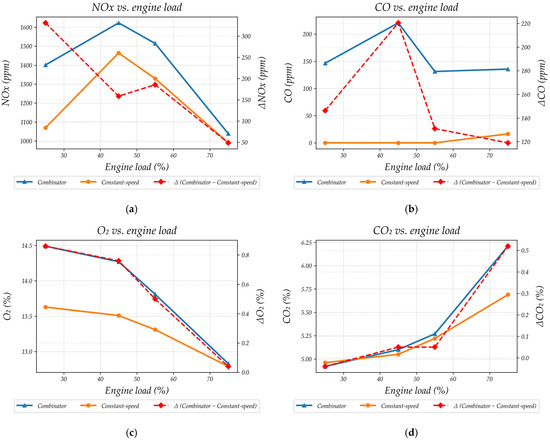
Figure 9.
Exhaust emission characteristics and performance–emission trade-off. Load-dependent variations in exhaust gas emissions under constant-speed and combinator CPP operating modes: (a) nitrogen oxides (NOx) and corresponding ΔNOx, (b) carbon monoxide (CO) and corresponding ΔCO, (c) oxygen (O2) and corresponding ΔO2, (d) carbon dioxide (CO2) and corresponding ΔCO2.
As shown in Figure 9a, NOx emissions increased with engine load for both CPP modes. At comparable loads, the combinator mode consistently exhibited higher NOx emissions. The NOx increase reached 331 ppm (31%) at 25% load, 159 ppm (11%) at 45% load, 185 ppm (14%) at 55% load, and 49 ppm (5%) at 75% load compared to the constant-speed mode. These increases are consistent with enhanced combustion effectiveness and higher in-cylinder temperatures associated with increased indicated work output.
The ΔNOx curve included in Figure 9a clearly demonstrates that the NOx penalty associated with combinator operation is greatest at low load, coinciding with the region of maximum fuel-efficiency improvement identified in Figure 6a.
Figure 9b shows that CO emissions decreased with increasing load for both modes, indicating improved oxidation at higher combustion temperatures. However, while CO concentrations in the constant-speed mode remained at or near the detection limit (0 ppm) at 25–55% load, the combinator mode produced CO levels ranging from 131 to 220 ppm in the same load range. At 75% load, CO emissions increased from 16.5 ppm in constant-speed operation to 135.6 ppm under combinator control, suggesting locally incomplete combustion or reduced oxidation residence time under altered load-sharing conditions.
The O2 concentration trends in Figure 9c show a gradual decrease with increasing load for both modes, while CO2 concentrations increased correspondingly, as shown in Figure 9d. At low and medium loads, the combinator mode exhibited O2 concentrations approximately 0.5–0.9 percentage points higher than those of the constant-speed mode, whereas CO2 concentrations differed by less than 0.2 percentage points up to 55% load. At 75% load, the CO2 concentration in the combinator mode increased to 6.21% compared to 5.69% in the constant-speed mode, reflecting increased overall fuel throughput and combustion intensity.
The ΔO2 and ΔCO2 curves further indicate that the combinator mode operated with higher excess oxygen at low and medium loads (ΔO2 ≈ +0.5–0.9% p) and slightly higher CO2 concentrations at high load, reflecting increased combustion intensity and overall fuel throughput.
Taken together, these emission results highlight a clear performance–emission trade-off: the combinator mode improves fuel efficiency and propulsion performance while moderately increasing NOx and CO emissions under certain load conditions.
The Δ-emission indicators illustrate that the emission penalties associated with combinator operation are most pronounced at partial loads, coinciding with the region of maximum fuel-efficiency improvement.
Although Figure 9 compares mode-dependent trends using measured concentrations (ppm), concentration-based comparisons can be misleading when engine speed differs between modes because exhaust throughput and work output vary simultaneously. Therefore, the emission results were additionally expressed in an estimated brake-specific form (g/kWh) (Figure 10), and the corresponding quantitative values are summarized in Table 8 to facilitate direct numerical comparison.
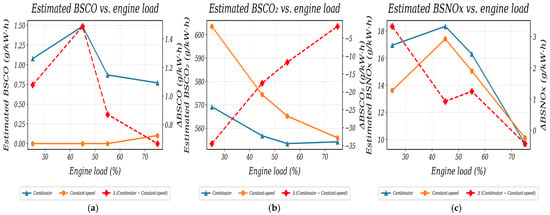
Figure 10.
Estimated brake-specific emissions (dry basis) under constant-speed and combinator CPP modes: (a) BSNOx, (b) BSCO, and (c) BSCO2. The dashed line denotes Δ (combinator − constant-speed). Values are estimated using measured FOC and shaft power with an assumed fuel carbon mass fraction ( = 0.85).
Table 8.
Quantitative comparison of estimated brake-specific emissions (g/kWh) under constant-speed and combinator CPP modes (dry basis). Δ indicates (combinator − constant-speed). Values are estimated using measured FOC and shaft power with = 0.85. For the mid-load comparisons, the constant-speed points at 45% and 55% were paired with the nearest stabilized combinator points at 47% and 54%, respectively (Table 6).
Figure 10 and Table 8 present the estimated brake-specific emissions (g/kWh) for NOx, CO, and CO2 as a function of engine load, together with the mode difference Δ (combinator − constant-speed). Compared with the concentration-only comparison in Figure 9, the work-normalized representation provides a more appropriate basis for assessing CPP-mode effects because it partially accounts for differences in engine speed, exhaust throughput, and work output.
For NOx (Figure 10a and Table 8), the estimated BSNOx exhibits a clear load-dependent mode difference. The largest increase occurred at 25% load, where BSNOx rose from 13.61 to 16.95 g/kWh under combinator operation (Δ = +3.33 g/kWh, +24.5%). At mid load (45–47%), the difference was smaller but still evident (Δ ≈ +1.1 g/kWh), whereas at 75% load the difference became marginal and slightly negative (Δ ≈ −0.42 g/kWh). This confirms that the NOx penalty associated with combinator operation is most pronounced at partial load and diminishes toward high-load operation when normalized by work output.
For CO (Figure 10b and Table 8), the brake-specific comparison reveals substantially higher CO emissions under combinator operation. While BSCO remained at or below the detection limit under constant-speed operation at partial and mid loads, the combinator mode exhibited a pronounced increase, reaching a maximum difference of approximately +1.53 g/kWh at the 45–47% load region. This indicates that, once normalized by work output, CO formation under combinator operation becomes more evident than suggested by concentration-based trends alone, reflecting increased sensitivity of oxidation completeness under reduced-speed conditions.
For CO2 (Figure 10c and Table 8), the estimated BSCO2 is consistently lower in the combinator mode at partial load, with the largest reduction observed at 25% load (Δ ≈ −34.5 g/kWh, −5.7%). The magnitude of this reduction decreases with increasing load and becomes negligible at 75% load. This behavior is consistent with the fuel-efficiency improvement identified under combinator operation at partial loads, as reduced fuel consumption per unit work directly translates into lower CO2 emissions per kWh.
It should be noted that the brake-specific values in Figure 10 and Table 8 are estimates derived with an assumed fuel carbon mass fraction ( = 0.85), because direct exhaust mass-flow measurements and fuel elemental analysis were not available during the sea trials. Nevertheless, presenting the results in g/kWh provides a methodologically more appropriate comparison between CPP modes and directly addresses the reviewer’s recommendation for work-normalized emission assessment.
4. Discussion
4.1. Operational Implications and CPP Control Strategy
Sea-operation results indicate that the optimal CPP mode is load-dependent. Combinator control improves propulsion efficiency at partial loads, but the associated NOx/CO penalties are most pronounced at low load. Therefore, CPP mode selection should follow a load-based switching strategy under Tier II FB operation.
4.1.1. Load-Dependent Operational Characteristics
The experimental results demonstrate that the impact of CPP operating mode on engine performance and exhaust emissions is strongly load-dependent. Under combinator CPP control, the engine exhibited clear advantages in propulsion performance and fuel efficiency at partial-load conditions, while these advantages diminished as engine load increased toward high-load operation.
At low and medium loads (approximately 25–55%), combinator operation resulted in a reduction in SFOC of up to 5.4% and an increase in shaft torque of up to 47% compared to constant-speed operation. These improvements were supported by higher MIEP and enhanced exhaust energy utilization, indicating improved engine–propeller matching under combinator control. In contrast, at high load (75%), the difference in SFOC between CPP modes became negligible, and the performance benefit of combinator operation was significantly reduced.
4.1.2. Emission-Sensitive Operational Trade-Offs
Despite the performance benefits observed at partial loads, combinator CPP operation was associated with increased exhaust emissions in concentration form. NOx increased by up to 31% at low load, while CO concentrations reached 130–220 ppm across the investigated load range. These results indicate that the enhanced combustion intensity and altered exhaust-system behavior under combinator control introduce a clear performance–emission trade-off. Importantly, the magnitude of NOx increase decreased with increasing load, suggesting that the emission penalty of combinator operation is most critical during low-load operation.
To complement the concentration-based trends, the work-normalized emission results provide a clearer basis for operational decision-making. To highlight the quantitative differences summarized in Figure 10 and Table 8, at 25% load the combinator mode improved fuel and CO2 performance, with SFOC decreasing from 193.67 to 183.16 g/kWh (−5.4%) and BSCO2 decreasing from 603.60 to 569.16 g/kWh (−5.7%). In contrast, BSNOx increased from 13.61 to 16.95 g/kWh (+24.5%), indicating a pronounced fuel–NOx trade-off at low load. At 75% load, the BSNOx difference became small (10.11 to 9.69 g/kWh, −4.2%) while BSCO2 remained nearly unchanged, suggesting that mode-dependent emission trade-offs become less pronounced toward higher loads under the present operating conditions.
These findings reinforce that CPP mode selection should be sensitive to both load level and emission constraints, particularly during prolonged low-load operation where the potential NOx penalty is largest relative to the efficiency gain.
4.1.3. Recommended CPP Operational Strategy Under Sea-Operation Conditions
To balance fuel-efficiency gains against emission constraints under Tier II FB sea-operation conditions, a load-dependent CPP strategy is proposed (Table 9). In brief, combinator control should be applied selectively at low load where emission penalties are largest, used continuously at medium load where efficiency gains are strongest with moderate emission impact, and avoided at high load where performance benefits become marginal.
Table 9.
Load-dependent CPP mode decision matrix under Tier II FB sea operation. Note: ↓ indicates a decrease; ↑ indicates an increase; → indicates no significant change.
Based on the work-normalized comparison, the proposed switching concept is further supported by the observation that the efficiency and CO2 benefits are most meaningful at partial loads, whereas the NOx trade-off is concentrated at the lowest load point. As load increases, the emissions penalty attenuates and the operational justification for mode switching becomes primarily driven by fuel-saving potential rather than emission risk.
4.1.4. Implications for Future Emission-Compliant Operation
The proposed operational strategy highlights that CPP should not be treated as a fixed control setting but rather as a dynamic operational parameter. Load-dependent CPP control, potentially combined with emission mitigation technologies such as EGR or SCR, may enable optimized propulsion performance while maintaining regulatory compliance. In particular, the favorable performance characteristics of combinator operation at medium loads suggest strong potential for integration with Tier III-oriented emission control strategies. Future work should therefore focus on validating the proposed load-dependent CPP control strategy under Tier III operation, where EGR or SCR systems are actively engaged, to quantify how CPP-induced performance gains interact with emission control effectiveness during real sea operation.
5. Conclusions
This study examined the effects of CPP operating modes on the performance and exhaust emission characteristics of a two-stroke marine diesel engine under Tier II FB sea-operation conditions, based on full-scale sea-trial measurements. The conclusions are drawn from experimentally verified, quantitative findings that clarify the operational implications of CPP control.
First, the combinator CPP mode improved fuel efficiency mainly at partial load, while the benefit diminished toward high-load operation. The measured SFOC decreased from 193.67 to 183.16 g/kWh at 25% load (−10.51 g/kWh, −5.43%), whereas the difference became negligible at 75% load (178.42 vs. 178.20 g/kWh; −0.22 g/kWh, −0.12%), confirming a strongly load-dependent efficiency benefit.
Second, the combinator mode increased shaft torque across the investigated load range, indicating improved engine–propeller matching under joint control. Shaft torque increased from 54.80 to 80.77 kNm at 25% load (+25.97 kNm, +47.39%) and from 156.40 to 167.92 kNm at 75% load (+11.52 kNm, +7.37%). The joint control characteristics also showed a clear operational distinction: in the combinator mode, pitch was saturated at ~100% from 25% load onward, and load formation was primarily associated with engine-speed variation (107.87–151.02 rpm), whereas the constant-speed mode maintained ~162 rpm and formed load mainly via pitch variation (47.11–91.68%).
Third, the improved propulsion performance was supported by increased indicated work without a disproportionate increase in peak combustion severity. The average MIEP increased from 0.507 to 0.711 MPa at 25% load (+0.204 MPa, +40.24%), while maximum combustion pressure remained within 11.06–18.11 MPa, with mode-to-mode changes limited to approximately ±0.50 MPa across the representative operating points.
Fourth, the boosting and exhaust-system responses under combinator operation provided a physical basis for the observed performance trends. Exhaust gas pressure was consistently lower in the combinator mode, decreasing from 65.00 to 50.55 kPa at 25% load (−14.45 kPa) and from 252.00 to 194.01 kPa at 75% load (−57.99 kPa). Turbine inlet temperature differences were modest at partial-to-mid loads (approximately +8–9 °C) and became lower at high load (−32.15 °C at 75% load), supporting mode-dependent changes in exhaust energy utilization without indicating a systematic increase in monitored turbocharging thermal indicators.
In contrast, when emissions were expressed in an estimated brake-specific form (g/kWh; dry-basis carbon-balance estimate with = 0.85), the combinator mode exhibited a clear efficiency–emission trade-off, most pronounced at partial load. At 25% load, the estimated BSNOx increased from 13.61 to 16.95 g/kWh (+3.33 g/kWh, +24.5%), while the mid-load penalty remained smaller but evident (Δ ≈ +1.1 to +1.6 g/kWh). At 75% load, the BSNOx difference became marginal and slightly negative (Δ ≈ −0.42 g/kWh). For CO, the constant-speed mode remained at or near the detection limit at partial-to-mid loads (~0 g/kWh), whereas the combinator mode showed substantially higher BSCO, reaching approximately 1.08 g/kWh at 25% load and peaking at about 1.53 g/kWh in the 45–47% region. For CO2, the estimated BSCO2 was lower in the combinator mode at partial load, decreasing from 603.60 to 569.16 g/kWh at 25% load (−34.45 g/kWh, −5.7%), while the reduction became negligible at 75% load (Δ ≈ −1.73 g/kWh, −0.31%), consistent with the measured SFOC improvement.
Overall, the present results demonstrate that CPP operating mode is a critical operational parameter governing the coupled behavior of propulsion performance, combustion characteristics, and work-normalized exhaust emissions under real sea-operation environments. Under Tier II FB conditions, combinator operation is advantageous for partial-load fuel and CO2 reduction, whereas constant-speed operation remains preferable when more stable NOx/CO behavior is prioritized, particularly as load increases.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Acknowledgments
During the preparation of this manuscript, the authors used ChatGPT 5.2 (OpenAI) for the purposes of English translation and language editing (sentence polishing and phrasing improvements) to enhance clarity and readability. The authors have reviewed and edited the output and take full responsibility for the content of this publication.
Conflicts of Interest
The author declares no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CPP | Controllable pitch propeller |
| FB | Fallback |
| SFOC | Specific fuel oil consumption |
| NOx | Nitrogen oxide |
| CO | Carbon monoxide |
| CO2 | Carbon dioxide |
| IMO | International Maritime Organization |
| EEDI | Energy efficiency design index |
| EEXI | Energy efficiency existing ship index |
| CII | Carbon intensity indicator |
| FPP | Fixed pitch propeller |
| MCR | Maximum continuous rating |
| SMCR | Specified maximum continuous rating |
| EGR | Exhaust gas recirculation |
| NDIR | Non-dispersive infrared |
| LAN | Local area network |
| EMS | Engine management system |
| ECS | Engine control system |
| MOP | Main operating panel |
| PMI | Cylinder pressure measurement system |
| DAU | Data acquisition unit |
| AMS | Alarm management system |
| VPN | Virtual private network |
| WAN | Wide area network |
| MIEP | Mean indicated effective pressure |
| Pmax | Maximum cylinder pressure |
| ppm | Parts per million |
References
- Roy, A.; Chakraborty, M. A review of ship emissions impacts on environmental, health, societal impacts and IMO’s mitigation policies. Reg. Stud. Mar. Sci. 2025, 81, 103964. [Google Scholar] [CrossRef]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Review of the IMO initiatives for ship energy efficiency and their implications. J. Mar. Sci. Appl. 2023, 22, 662–680. [Google Scholar] [CrossRef]
- IMO. Ship Energy Efficiency Regulations and Related Guidelines; IMO: London, UK, 2015. [Google Scholar]
- IMO. Amendments to MARPOL Annex VI (Energy Efficiency Existing Ship Index and Carbon Intensity Indicator); Resolution MEPC: London, UK, 2021; Volume 328. [Google Scholar]
- Ren, H.; Zhang, J.; Gu, Y. Influence of EEDI (Energy Efficiency Design Index) on Ship–Engine–Propeller Matching. J. Mar. Sci. Eng. 2019, 7, 425. [Google Scholar] [CrossRef]
- Marques, C.H.; Caprace, J.-D.; Belchior, C. An approach for predicting the specific fuel consumption of dual-fuel two-stroke marine engines. J. Mar. Sci. Eng. 2019, 7, 20. [Google Scholar] [CrossRef]
- Geertsma, R.D.; Negenborn, R.R.; Visser, K. Adaptive pitch control for ships with diesel mechanical and hybrid propulsion. Appl. Energy 2018, 228, 2490–2509. [Google Scholar] [CrossRef]
- Saettone, S.; Peymani, A.; Simonsen, C.D.; Pérez, R. The importance of the engine-propeller model accuracy on the performance prediction of a marine propulsion system in the presence of waves. Appl. Ocean Res. 2020, 103, 102320. [Google Scholar] [CrossRef]
- Tian, W.; Lang, X.; Zhang, C. Optimization of Controllable-Pitch Propeller Operations for Yangtze River Sailing Ships. J. Mar. Sci. Eng. 2024, 12, 1579. [Google Scholar] [CrossRef]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Optimization procedures for a twin controllable pitch propeller of a ROPAX ship at minimum fuel consumption. J. Mar. Eng. Technol. 2023, 22, 167–175. [Google Scholar] [CrossRef]
- Ozturk, Y.; Kurt, R.E.; Guedes Soares, C. The Effect of Propeller Pitch on Ship Propulsion. Trans. Marit. Sci. 2022, 11, 162–171. [Google Scholar] [CrossRef]
- Aletras, N.; Karvountzis-Kontakiotis, A.; Kefalas, N.; Grigoriadis, A.; Samaras, Z.; Ntziachristos, L. Optimization-Based Energy Management Algorithm for 2-Stroke Hybrid Ship with Controllable Pitch Propeller. J. Mar. Sci. Eng. 2024, 12, 2331. [Google Scholar] [CrossRef]
- Chen, D.; Gu, X.; Wu, T. A Hull–Engine–Propeller Matching Method for Shaftless Rim-Driven Thrusters. J. Mar. Sci. Eng. 2025, 13, 1414. [Google Scholar] [CrossRef]
- Herdzik, J. Problems of Nitrogen Oxides Emission Decreasing from Marine Diesel Engines to Fulfil the Limits of Tier 3. Rocz. Ochr. Sr. 2019, 21, 671–689. [Google Scholar]
- Okumuş, F.; Kökkülünk, G. Review of Nitrogen Oxides (NOx) Reduction Methods Used on Marine Diesel Engines. J. Mar. Eng. Technol. 2023, 3, 34–44. [Google Scholar] [CrossRef]
- Andersson, K.; Brynolf, S.; Lindgren, J.F.; Wilewska-Bien, M. (Eds.) Shipping and the Environment: Improving Environmental Performance in Marine Transportation; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Tran, T.G.; Kim, H. A study on the matching problem of engine, propeller, and ship hull under actual service conditions. Int. J. Naval Archit. Ocean Eng. 2023, 15, 100538. [Google Scholar] [CrossRef]
- Arina, I.M.; Iswantoro, A.; Fitri, S.A. Combining Optimum Propeller Design on Roro Ship Re-engine. Kapal J. Ilmu Pengetah. Dan Teknol. Kelauta 2023, 20, 201–2013. [Google Scholar] [CrossRef]
- Lee, J.; Dao, V.Q.; Jeong, E.-S.; Noh, J.-H.; Lee, J.-U. Efficiency Comparison and Optimal Voyage Strategy of CPP Combination and Fixed Modes Based on Ship Operational Data. Appl. Sci. 2025, 15, 10435. [Google Scholar] [CrossRef]
- ISO 8178; Reciprocating Internal Combustion Engines—Exhaust Emission Measurement. International Organization for Standardization: Geneva, Switzerland, 2017.
- Revised MARPOL Annex VI: Regulations for the Prevention of Air Pollution from Ships and NOx Technical Code 2008; International Maritime Organization (IMO): London, UK, 2009.










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.