Abstract
With the trend of internationalization, maritime traffic density has gradually increased. Since 2002, the International Maritime Organization (IMO) has required various types of vessels to be equipped with the Automatic Identification System (AIS). Through AIS static and dynamic data, more complete navigational information of vessels can be obtained. As the Port of Kaohsiung is currently transitioning into a smart port, this study focuses on inbound and outbound vessels of the Second Port of Kaohsiung. It considers both the safety monitoring of the smart port and environmental security, integrating a big data database to provide early warnings for abnormal navigation conditions. This study builds an integrated database based on vessel AIS data, conducts AIS big data analysis to extract useful information, and establishes a random forest model to predict whether a vessel’s course and speed during port navigation deviate from normal patterns, thereby achieving the goal of early warning. This study also helps reduce the risk of collisions caused by abnormal vessel operations and thus prevents marine pollution in the port area due to oil spills or hazardous substance leakage. Through real-time monitoring and early warning of navigation behavior, it not only enhances navigation safety but also serves as the first line of defense against marine pollution, contributing significantly to the protection of the port’s ecological environment and the promotion of sustainable development.
1. Introduction
With the rapid globalization of trade and advances in transportation technology, global maritime traffic density has increased significantly. Maritime transport, with its large carrying capacity, cost efficiency, and operational reliability, has become the dominant mode of international logistics. Consequently, ensuring navigational safety, especially within congested port waters, has become a critical concern.
Since 2002, the International Maritime Organization (IMO) has required most vessels to be equipped with the Automatic Identification System (AIS). AIS transmits both static and dynamic vessel data in real time, enhancing situational awareness during port entry and departure. Complementing this, Vessel Traffic Services (VTS) provide real-time monitoring, communication, and operational guidance, further improving navigational safety. However, given the large size and limited maneuverability of ships, and their sensitivity to environmental factors such as sea state and weather, maritime accidents can cause severe consequences, including vessel damage, crew injuries, cargo loss, and environmental pollution. Accidents in port waters often disrupt operations entirely, resulting in major economic and logistical impacts. Modern Vessel Traffic Services (VTS) operate under increasingly complex conditions, managing dense traffic flows, collision-avoidance tasks, and real-time emergency response. Prior studies emphasize that VTS effectiveness is strongly influenced by operator workload, information-processing limits, and the difficulty of maintaining situational awareness in confined waters such as Kaohsiung’s Second Port [1]. As maritime hubs continue to expand in scale and operational intensity, traditional reactive monitoring, based on visual observation, VHF communication, and post-event AIS playback, has become insufficient for preventing time-critical incidents. Strengthening VTS with predictive, data-driven decision-support tools is therefore essential for transitioning from reactive risk assessment to proactive safety management [2].
Recent maritime accident records further demonstrate that the global maritime industry continues to rely primarily on reactive safety assessments. High-profile incidents such as the Ever Given grounding in the Suez Canal (2021) and the Francis Scott Key Bridge allision in Baltimore (2024) were investigated only after the events occurred, with safety analysis largely dependent on retrospective AIS playback and post-incident inquiry reports. Although AIS and VTS technologies have greatly improved situational awareness, these cases reveal that current port safety practices remain focused on after-the-fact reconstruction rather than proactive prevention [3,4]. This gap highlights the urgent need for real-time, predictive early-warning mechanisms, particularly in confined harbor domains such as the Second Port of Kaohsiung, where narrow turning areas amplify the risk of collision and course deviation.
Insurance and safety records consistently demonstrate that a considerable proportion of maritime collisions and groundings occur in the vicinity of ports. Statistics from The Swedish Club [5] indicate that approximately 38% of all ship groundings take place during port-approach or within port limits, while data from the Australian Maritime Safety Authority (AMSA) [6] show that about 44% of reportable marine incidents occur inside port boundaries. Complementing these global findings, regional analyses of the Baltic Sea further reveal that a notable share of grounding accidents arises during port-approach or near-coastal maneuvering, underscoring the elevated risks associated with confined-water navigation.
Integrating VTS and AIS has thus become essential for improving port safety. AIS enables precise vessel identification and dynamic tracking, while VTS offers decision-support and real-time safety alerts. Compared with traditional traffic monitoring methods such as visual observation and radar plotting, which are time-consuming and labor-intensive, digital systems based on VTS and AIS allow continuous, large-scale, and efficient vessel movement monitoring. AIS data have also been extensively used to analyze maritime traffic patterns and vessel interactions, improving understanding of navigational behavior and safety conditions [7,8].
Nevertheless, maritime accident analysis in Taiwan and many other regions remains largely reactive, relying on post-incident reviews to identify causes and recommend countermeasures. Such retrospective approaches cannot fully reconstruct accident scenarios and are often implemented only after significant damage has occurred. Therefore, developing proactive, real-time predictive systems for maritime safety is an urgent necessity [9,10].
This study was motivated by observed vessel maneuvering behaviors within the Second Port of Kaohsiung, Taiwan. Past incidents have shown that vessels in the turning basin often deviate from planned courses due to environmental disturbances or human error, leading to potential collision risks. Current monitoring systems, however, are limited in predicting whether vessel trajectories may pose threats to nearby ships or port structures. The Kaohsiung VTS Center has accumulated extensive AIS historical data and ocean–meteorological records that contain valuable navigation patterns. The Second Port’s turning basin, characterized by narrow geometry and large-angle turning requirements, presents a high-risk area where excessive speed or improper rudder use can lead to ship-to-ship or ship-to-wharf collisions [11].
Although existing studies have discussed AIS-based anomaly detection, most frameworks focus on open-sea or straight-channel navigation and lack mechanisms that incorporate the operational constraints and spatial characteristics of confined harbor turning basins. To explicitly address this gap, the present study highlights two key layers of novelty. On the model level, we integrate VTS operational logic, port-specific turning geometry, and maneuverability constraints directly into the Random Forest framework, an approach rarely explored in prior anomaly-detection literature. On the application level, this research is among the first to design an early-warning mechanism specifically tailored to confined turning basins by constructing spatially dependent COG/SOG envelopes derived from long-term historical trajectories of large container vessels in Kaohsiung. These enhancements allow the proposed system to detect risk patterns that conventional AIS methods cannot capture.
This study focuses on enhancing navigational safety within Kaohsiung Port, particularly in the Second Port’s turning basin during entry and departure operations. A collision early-warning model integrating VTS and AIS data is proposed, employing big data analytics and a Random Forest algorithm to identify abnormal vessel trajectories. By combining AIS trajectories with oceanographic and meteorological variables, the model can continuously monitor turning behavior, assess deviations in speed and heading, and generate early alerts for potential hazards. Unlike traditional post-event analyses, this proactive approach enables VTS operators to deliver timely navigational advice and preventive measures before accidents occur. Ultimately, the proposed framework aims to support the development of a smart port safety management system, integrating intelligent monitoring, predictive analytics, and data-driven decision-making to ensure secure and efficient port operations. The proposed RF-based predictive framework directly responds to these operational challenges by providing early identification of deviations that may escape immediate human detection, thereby reducing cognitive load and enhancing the timeliness of VTS interventions.
Despite the growing body of research on AIS-based anomaly detection and maritime traffic analytics, three key research gaps remain. First, existing studies predominantly focus on open-sea or straight-channel navigation, whereas confined turning basins, with strong spatial constraints and port-specific maneuvering characteristics, have received limited attention. Second, prior machine-learning approaches seldom integrate VTS operational logic, port geometry, and localized turning-radius constraints into a unified predictive framework. Third, few studies have developed real-time, deviation-based early-warning mechanisms capable of supporting VTS decision-making in port-specific contexts such as Kaohsiung’s Second Port.
To address these gaps, this study is guided by the following research questions:
- RQ1:
- Can vessel behavior in a confined turning basin be modeled through AIS-based ma-chine-learning methods that capture spatially dependent COG/SOG patterns?
- RQ2:
- How accurately can a Random Forest model predict normal maneuvering profiles within the Second Port of Kaohsiung?
- RQ3:
- Can deviations from these predicted patterns, quantified through a data-driven re-sidual envelope, serve as reliable early-warning indicators for VTS operations?
In summary, this study makes three key contributions to the field of predictive port-safety management. First, it develops one of the first port-specific predictive safety frameworks for confined turning basins, integrating Random Forest modeling with VTS operational logic, maneuverability constraints, and port-dependent geometry. Second, it introduces a mathematically formalized deviation envelope using residual-based σ-thresholds, enabling real-time anomaly detection that is reproducible and operationally interpretable for confined port environments. Third, it demonstrates practical applicability through accident-based case validation, showing how early deviations in COG/SOG can be identified minutes before they are visually observable, offering direct value to VTS decision-making.
The remainder of this paper is organized as follows. Section 2 presents the literature review. Section 3 describes the methodology and proposes the research hypotheses. Section 4 introduces the navigational environment and maneuvering constraints of Kaohsiung Port. Section 5 outlines data collection, preprocessing, and model development. Section 6 presents the results, benchmarking analysis, and case validation. Section 7 concludes the paper with implications, validation of the research hypotheses, and recommendations for future work.
2. Literature Review
This section reviews prior research relevant to the development of a data-driven early warning system for vessel navigation in confined port waters. It first examines the role of Vessel Traffic Services (VTS) in safety monitoring and their evolving function from passive surveillance to proactive risk management. It then summarizes key applications of AIS big data in maritime traffic analysis and anomaly detection, with particular attention to narrow waterways and the operational context of Kaohsiung Port. Finally, it discusses existing predictive modeling approaches, especially machine learning algorithms, and identifies the remaining gaps that motivate the proposed VTS–AIS–based random forest model for the Second Port of Kaohsiung.
- VTS-Based Safety Monitoring in Confined Waters:
Vessel Traffic Services (VTS) constitute a fundamental shore-based component for navigational safety, traffic efficiency, and environmental protection in congested waterways [12]. Early studies emphasized VTS’s role in traffic organization, collision avoidance, and search-and-rescue coordination [13,14]. However, despite technological progress in radar, AIS, and multi-sensor integration, most VTS applications remain reactive, focusing on monitoring and post-incident reporting. Recent research highlights the need for a transition toward predictive and data-driven VTS operations. Praetorius [15] and Durczak & Filina-Dawidowicz [16] showed that VTS effectiveness depends on human-system interaction and standardized procedures, while emerging “next-generation” concepts advocate automated alerting and AI-assisted decision support [9,17]. AIS-based anomaly detection has been well developed for large-scale traffic patterns and open-sea operations, yet applications tailored to the localized constraints of individual ports remain limited. Pallotta et al. [18] demonstrated that AIS trajectory clustering can reveal typical maritime traffic structures, but their framework focuses on broad-area patterns rather than confined maneuvering spaces. Zissis et al. [19] developed a real-time AIS-based vessel behavior prediction framework that can support maritime decision-making processes, although their system remains oriented toward broad-area traffic monitoring rather than port-specific, geometry-constrained environments. Zhao and Shi [20] applied density-based clustering to AIS trajectories and identified abnormal vessel behaviors in near-port environments, demonstrating the effectiveness of unsupervised clustering techniques for detecting deviations in speed and course patterns. Consequently, no existing study provides a port-specific early-warning model for confined turning basins, where vessel behavior is highly sensitive to local geometric and hydrodynamic constraints. This gap motivates the development of the predictive framework proposed in this study.
- Applications of AIS Big Data in Maritime Traffic Analysis:
The universal adoption of AIS has generated massive spatiotemporal datasets for quantitative traffic and risk analysis [13]. Data-mining and clustering methods have been widely applied to extract traffic features and detect anomalies [21]. Systematic reviews confirm the growing maturity of AIS-based analytics but also highlight persistent data-quality and contextual-integration challenges [22,23,24]. Liu demonstrated that AIS-derived kinematic indicators outperform CPA-only methods in collision risk estimation [25], while Ma et al. combined AIS and accident data for spatially explicit safety assessment [9]. Nevertheless, most existing models remain macroscopic, emphasizing density and encounter frequency rather than localized early-warning mechanisms that combine AIS, meteorological, and VTS operational data within a unified port framework.
Despite extensive use of AIS data in traffic pattern analysis, prior work rarely incorporates port-specific geometric constraints or models vessel behavior within restricted turning basins.
- Navigational Risks in Narrow Channels:
Navigation in confined waterways is strongly influenced by the combined effects of vessel size, under-keel clearance, bank effects, and channel geometry, which significantly alter maneuverability and hydrodynamic forces [26]. Empirical findings link congestion, machinery failure, and psychological workload to loss-of-control incidents [27]. AIS-based studies in constrained channels, such as Kang et al. for the Houston Ship Channel, reveal that restricted cross-sections significantly elevate encounter risk [8]. For Kaohsiung, Cheng & Wang verified through motion prediction that limited turning radius and under-keel clearance demand precise speed and rudder management [28]. Yet, few investigations have translated such localized hydrodynamic constraints into real-time, operational early-warning models integrated with VTS systems.
However, existing narrow-channel studies focus primarily on straight-channel hydrodynamics and do not address complex turning motions in circular or semi-circular port basins such as those in Kaohsiung.
- Predictive Modeling for Vessel Behavior and Risk Assessment:
Machine-learning techniques have recently advanced maritime risk prediction. Neural-network approaches [17] achieve high accuracy but limited interpretability for real-time VTS use. Ensemble tree models, especially random forests, offer a balance between transparency and predictive power [29,30]. Random forests have been successfully applied to AIS-based destination prediction [20] and data-driven safety evaluation [5]. Comparative reviews [22,24] further underscore their suitability for interpretable maritime analytics. Despite these advances, few models explicitly address Kaohsiung’s confined Second Port, where vessel turning dynamics and local hydro-meteorological effects necessitate a specialized, VTS-embedded predictive framework.
Although many predictive models have been proposed, few integrate VTS operational logic with machine-learning prediction to generate real-time deviation-based early-warning indicators in port environments.
- Synthesis and Research Gap:
Existing research confirms that (1) VTS remains underutilized as a proactive, model-based safety tool; (2) AIS big data enables powerful traffic and anomaly analysis but lacks port-specific integration; and (3) machine-learning models, particularly random forests, can deliver interpretable, real-time risk predictions. The present study therefore develops a VTS–AIS-based random forest early-warning model for Kaohsiung’s Second Port, integrating AIS trajectories, ship particulars, and local hydro-meteorological data to define safe turning envelopes and support intelligent, data-driven port safety management. Based on the identified research gap, the following research hypotheses are proposed and formally presented in Section 3.1.
3. Methodology
This study employs the Random Forest algorithm to construct a predictive framework for evaluating navigational risks associated with vessels operating in the Second Port of Kaohsiung. Random Forest, an ensemble methodology consisting of multiple decision trees, enhances the robustness and accuracy of prediction by aggregating the outcomes of independently generated trees. The model integrates AIS-derived trajectories, ship characteristics, and local hydro-meteorological conditions to detect abnormal maneuvering behaviors, quantify collision likelihood, and generate interpretable indicators that support real-time decision-making in Vessel Traffic Service (VTS) operations. The theoretical foundations and computational mechanisms applied in this work are outlined below.
3.1. Research Hypotheses
To establish the analytical foundation of the proposed early-warning framework, this study develops two testable hypotheses based on the spatially dependent characteristics of vessel maneuvering behavior and the predictive capabilities of machine-learning models in confined waterways:
H1 (Predictability Hypothesis):
Vessel trajectories in the Second Port turning basin exhibit stable and statistically learnable patterns in COG and SOG, such that a supervised machine-learning model (Random Forest) can accurately predict their expected values based on AIS kinematic and positional features.
H2 (Risk-Deviation Hypothesis):
Significant deviations from the model-predicted COG and SOG, particularly those exceeding the data-driven residual envelope of ±1σ, are associated with increased navigational risk and can therefore serve as reliable indicators of abnormal maneuvering behavior in confined turning-basin operations.
These hypotheses are directly linked to the study’s predictive modeling design and form the basis for the anomaly-detection mechanism developed in subsequent sections.
3.2. Core Mechanisms of the Random Forest Algorithm
Random Forest is recognized as a representative ensemble learning technique that synthesizes the outputs of numerous decision trees to achieve improved predictive performance and stability, a process detailed extensively in prior studies such as [31]. The construction of each tree relies on several impurity-based metrics that guide the partitioning of data during model training.
- (1)
- Gini Impurity: Gini impurity serves as a measure of class dispersion within a node. A smaller impurity value indicates that the node is more homogeneous. It is computed using:
- with p and (1 − p) indicating the respective proportions of the two categories.
- (2)
- Information Gain: Information gain is used to determine how effectively a feature separates data when forming decision splits. It is expressed as the difference between the impurity of the parent node and the weighted impurity of its descendant nodes:
Here, Giniparent denotes the impurity of the parent node, while Ginileft and Giniright represent the impurities of the two resulting child nodes. Nleft, Nright, and N correspond to the sizes of the child nodes and the parent node, respectively. This criterion identifies the feature that achieves the greatest improvement in node purity.
- (3)
- Randomization and Forest Construction: Two layers of randomness contribute to the diversity of trees in a Random Forest model. First, bootstrap sampling is adopted, allowing each tree to be trained on a unique subset of the original dataset. Consequently, certain samples may appear repeatedly within a tree, whereas others may be omitted entirely. Second, during the construction of each node, the algorithm randomly selects a subset of predictors instead of evaluating all features. This mechanism increases tree heterogeneity and strengthens generalization performance by mitigating overfitting.
- (4)
- Prediction: Classification and Regression: For classification tasks, Random Forest adopts a majority voting strategy, where the predicted class is determined by:
Y = mode{T1(x), T2(x), …, Tn(x)}
This process not only determines the final class label but also yields probability estimates reflecting prediction confidence.
For regression applications, the model aggregates numeric outcomes by calculating the mean:
- (5)
- Evaluation of Feature Importance: The contribution of each predictor to the model is quantified through its accumulated reduction in Gini impurity across all trees:
In this expression, ΔGini(Fj, Ti) denotes the decrease in impurity when feature Fj is used to split tree Ti. Summing this effect over the full ensemble yields an estimate of each feature’s relative importance, thereby enhancing transparency and interpretability in the context of navigational risk management.
Overall, Random Forest provides a resilient analytical structure capable of delivering high-quality predictions through bootstrap aggregation and randomized feature selection. Additionally, its inherent feature-importance evaluation facilitates the identification of influential navigational factors, enabling more reliable risk assessment and more informed VTS operational decision-making. Random Forest is particularly suitable for confined turning-basin environments because vessel behavior in such areas is strongly nonlinear, spatially dependent, and influenced by interactions among multiple variables, including position, heading, speed, turning curvature, and hydrodynamic effects. Unlike parametric or single-tree models, RF can simultaneously capture these nonlinear relationships and high-order interactions across different locations within the turning basin. Its ensemble structure also enhances robustness against noise and irregular AIS sampling, producing stable predictions even when vessels experience momentary disturbances caused by wind, current, or rudder adjustments. These characteristics make RF well aligned with the operational dynamics of narrow-channel maneuvering, where traditional linear or proximity-based models struggle to model abrupt yet navigationally meaningful changes. Compared with alternative regression- and tree-based models, Random Forest provides the most stable and operationally reliable predictions under the nonlinear and spatially constrained dynamics of confined turning basins, making it the most suitable choice for VTS-oriented early-warning applications.
3.3. Predictive Anomaly Detection
In this study, predictive anomaly detection is employed to identify abnormal vessel maneuvers by comparing real-time navigation behavior against normal patterns learned from historical AIS data. The AIS database consists primarily of records collected under normal operating conditions within the Second Port of Kaohsiung, representing typical maneuvering profiles. These data are used to train a Random Forest model that captures nonlinear relationships among navigational and environmental variables, including speed, heading, rate of turn, draft, and local hydro-meteorological factors.
During real-time operations, incoming AIS updates are processed continuously. For each data point, the trained Random Forest model generates an expected “normal” navigation state based on the vessel’s current conditions. The deviation between the predicted and observed values is then evaluated against a statistical threshold. When the deviation exceeds this threshold, the system classifies the maneuver as anomalous and issues an early-warning alert. This predictive mechanism allows potential risks to be identified before they escalate into hazardous situations, thereby supporting VTS operators with real-time, data-driven decision assistance. The methodological design operationalizes H1 through supervised prediction of spatially dependent COG/SOG patterns and H2 through statistical evaluation of deviations from the resulting prediction envelope.
To ensure operational flexibility, the anomaly-detection threshold is treated as an adjustable parameter rather than a universal standard. The ±1σ envelope adopted in this study serves as a demonstrative baseline to illustrate how Random-Forest residuals can be transformed into actionable deviation ranges. In practice, VTS operators may calibrate this threshold, such as ±1.5σ, ±2σ, or quantile-based limits, according to local maneuvering characteristics, hydrodynamic conditions, port geometry, traffic density, or acceptable alert frequency. Consultations with VTS personnel further indicate that moderate-deviation detection is often more valuable for confined turning basins than rare-event filtering alone; thus, ±1σ offers a conservative initial setting that can be systematically refined during operational deployment.
3.4. Methodology Framework and Implementation
Before conducting this study, a series of comprehensive steps were designed to ensure the rigor and effectiveness of the methodology. These steps, ranging from AIS data preprocessing to real-time model validation, are essential to the reliability and practical applicability of the findings. The primary goal was to develop a model capable of effectively predicting and issuing early warnings for abnormal vessel navigation behaviors during port entry, thereby enhancing the safety management system of the Port of Kaohsiung. The specific methodological steps are as follows: (Figure 1)
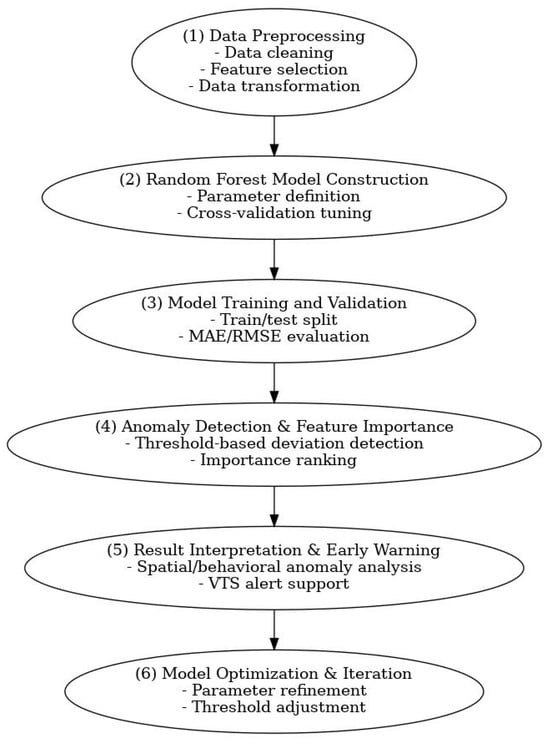
Figure 1.
Six-Stage Methodological Framework: Data Preprocessing, Random Forest Model Construction, Training/Validation, Anomaly Detection, Result Interpretation, and Iterative Optimization.
- (1)
- Data Preprocessing:
Data Cleaning: Remove missing or erroneous AIS records, outliers, and noise such as small craft or tugboat signals to ensure data accuracy and consistency.
Feature Selection: Select navigational and environmental variables relevant to vessel movement within the Second Port of Kaohsiung, including SOG, COG, heading, draft, vessel dimensions, and wind conditions.
Data Transformation: Standardize time-series data and spatial coordinates (longitude and latitude), and normalize numerical variables to improve model interpretability.
- (2)
- Random Forest Model Construction:
Build the Random Forest–based predictive model by defining parameters such as the number of trees, maximum depth, and minimum samples per node. Cross-validation was applied to determine optimal parameter settings and enhance model generalization for diverse navigation scenarios.
- (3)
- Model Training and Validation:
Divide the dataset into training and validation subsets. Train the model using historical AIS data recorded under normal navigation conditions and evaluate predictive accuracy using performance metrics such as Mean Absolute Error (MAE) and Root Mean Square Error (RMSE).
- (4)
- Anomaly Detection and Feature Importance Analysis:
Apply the trained Random Forest model to compare real-time AIS inputs with predicted normal navigation patterns. When deviations exceed the defined threshold, the system flags abnormal behavior. Use the feature importance function to identify which variables (e.g., True Heading, SOG, wind direction) have the greatest influence on anomaly detection.
- (5)
- Result Interpretation and Early Warning Application:
Interpret model outputs to determine the spatial and behavioral characteristics of detected anomalies. Based on predictive alerts, provide real-time warnings for potential collision or deviation risks to support Vessel Traffic Service (VTS) operators in timely decision-making and vessel guidance.
- (6)
- Model Optimization and Iteration:
Continuously refine the model based on validation outcomes and operational feedback. Adjust parameters and threshold levels to improve detection precision and reduce false alarms, ensuring robust real-time applicability in varying port conditions.
Through this methodology, the study aims to establish an intelligent early warning model capable of identifying abnormal navigation behavior in real time, thereby supporting proactive maritime traffic management, reducing collision risk, and strengthening the overall navigational safety framework of the Port of Kaohsiung.
4. Navigational Environment and Maneuvering Constraints of the Port of Kaohsiung
4.1. Navigational Environment of the Port of Kaohsiung
The geographical location of the Port of Kaohsiung is shown in Figure 2. As illustrated, Taiwan faces the Pacific Ocean to the east and is separated from mainland China to the west by the Taiwan Strait, a crucial maritime corridor along the western Pacific shipping routes. Located along the southwestern coast of Taiwan, the Port of Kaohsiung occupies a strategic position at the junction of the Taiwan Strait and the Bashi Channel, midway between Hong Kong and Shanghai. The Port of Kaohsiung, Taiwan’s largest international commercial harbor, was originally developed from a natural lagoon and has since been expanded into a vast harbor area with an extensive hinterland (Figure 3). The latest available data for Kaohsiung Port in 2025 shows that the port ranks around 20th globally in container handling. It handled approximately 6 million TEUs in the first eight months of 2025, with an annual handling capacity exceeding 10 million TEUs. The port operates 39 berths across 9 terminals. Historically, Kaohsiung Port ranked among the top 15 container ports globally [32]. It serves as Taiwan’s primary gateway and distribution center for import and export cargo and functions as a multi-purpose harbor, integrating commercial, industrial, fishing, and military operations. This vast and well-developed harbor layout provides the foundation for Kaohsiung’s continued role as a major maritime hub in East Asia.
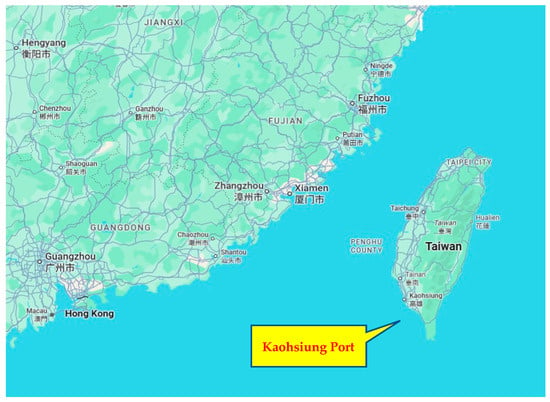
Figure 2.
Geographic Location of the Port of Kaohsiung.
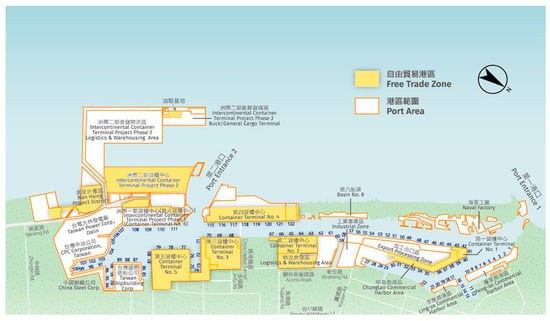
Figure 3.
Port map of Kaohsiung Port Image source: Official website of the Kaohsiung Port Branch and this study’s illustration.
4.2. Factors Contributing to Navigational Difficulties in the Port of Kaohsiung
The primary causes of ship collisions can generally be attributed to three major factors: human, environmental, and vessel-related. From an environmental perspective, the Second Harbor of the Port of Kaohsiung primarily handles large container ships and bulk carriers. Navigating within such narrow waterways significantly increases the psychological stress on ship operators. When the geographical configuration or traffic environment of a particular water area makes vessel maneuvering difficult, it not only heightens the navigator’s mental strain but also increases the inherent difficulty of ship handling. Consequently, the probability of navigation accidents rises accordingly. Therefore, the occurrence of navigation accidents is closely linked to the navigational environment. When discussing narrow waterways and high-density traffic zones, it is essential not only to ensure that navigators maintain their psychological composure but also to provide sufficient protective and early warning systems to instill confidence during vessel maneuvering.
The turning basin in Kaohsiung’s Second Harbor is a typical example of a narrow and curved waterway, as shown in Figure 4. When entering the port from the main channel, vessels must pass through the breakwater. Only those berthing on the south side of the Third Container Terminal or the north side of the Fifth Container Terminal can proceed without turning; all other vessels must turn either northward or southward after entry. Making these sharp turns immediately after passing the breakwater creates a degree of mental pressure for navigators due to the large turning angles required. The same applies when departing the port. Furthermore, rudder efficiency and speed control must meet specific conditions; insufficient rudder response can result in unsuccessful turning, while excessive speed upon entering the breakwater can lead to delayed maneuvering and potential collisions within the port. Turning too early or too late may also create collision risks with other vessels or port structures.
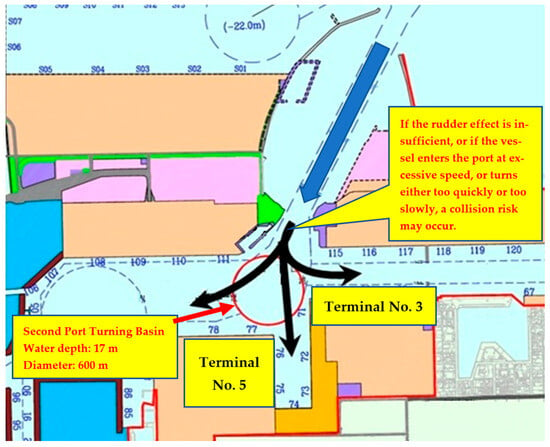
Figure 4.
Navigational Challenges in the Second Harbor Turning Basin.
Global accident statistics consistently show that confined-water maneuvers represent one of the highest-risk phases of navigation. IMO’s Global Integrated Shipping Information System (GISIS) and annual safety digests from MAIB and NTSB report that 30–40% of maritime collisions and groundings occur during port entry, departure, or low-speed turning operations, despite these maneuvers representing only a small fraction of total voyage time. Many of these events involve loss of maneuvering control, excessive turning rate, or deviation from expected COG/SOG profiles, conditions highly relevant to the Second Port of Kaohsiung. Although port-specific incident numbers are not publicly disclosed, these international statistics provide quantitative evidence that turning-basin maneuvering is disproportionately associated with elevated navigational risk.
With the ongoing trend of increasing vessel size, the largest ships entering and departing the Second Harbor of Kaohsiung Port now reach nearly 220,000 tons. Therefore, this study focuses on analyzing the navigational and environmental conditions within the Second Harbor turning basin. Except for vessels berthing at the north side of Terminal No. 5 or the south side of Terminal No. 3, all other ships must perform large-angle turns to either port or starboard. Additionally, wind direction and speed can further complicate navigation, increasing risks to vessel safety within the port.
During port entry or departure, improper adjustments of rudder angle or navigational speed can cause severe harm to both the vessel and the port infrastructure, particularly in confined waters where maneuvering space is limited. Therefore, installing a ship-turning safety early warning system within the port would provide substantial assistance to navigators, helping to reduce psychological stress and enhance navigational safety. Such a system would contribute to building a safer and smarter maritime operational environment for both vessels and the port of Kaohsiung.
5. Data Collection, Preprocessing, and Model Development for AIS-Based Predictive Analysis
This study begins by constructing an integrated database combining AIS data and meteorological information sourced from the Institute of Transportation and the Central Taiwan Navigation Affairs Center of the Maritime and Port Bureau. The dataset includes historical vessel movements and wind speed/direction data for the Port of Kaohsiung. Preprocessing steps involved standardizing field formats, merging time columns, and filtering by geographic range within the turning basin and access channels of the Second Port. To ensure that only representative and operationally meaningful trajectories were retained, AIS records were filtered by vessel length (>100 m) and speed over ground (>2.5 knots), as shown in Table 1.

Table 1.
AIS Big Data Filtering Criteria Settings.
A total of eleven parameters were selected as model inputs, including vessel dynamics (SOG, COG, longitude, latitude, true heading, draft, length, width), meteorological variables (average wind speed and direction), and port entry/exit direction (Table 2). GIS processing was conducted to convert AIS CSV files into map layers based on the WGS84 coordinate system, allowing clear visualization of historical tracks for anomaly-detection analysis.
Table 2.
Parameters Used.
The predictive model was developed using the Random Forest algorithm with Gini Impurity as the splitting criterion. To prevent temporal data leakage and ensure operational realism, a chronological split was used when dividing the dataset. AIS records from earlier time periods were assigned to the training set, while later records were reserved exclusively for testing. This approach mirrors real VTS operational conditions, where future vessel behavior must be predicted solely from past information, and prevents improperly high accuracy that may occur when random shuffling allows future data to influence model training. The chronological split resulted in an approximately 80/20 division between training and testing records. After applying all spatial, speed, and vessel-size filters, the final dataset contained 217,323 AIS records representing cleaned and validated vessel movements within the Second Port turning basin. Ten-fold cross-validation was performed on the training set to tune model parameters and evaluate prediction stability before applying the model to the chronologically separated test data.
The final model predicts whether vessel speed and course deviate from expected patterns under specific spatial and environmental conditions, providing the basis for real-time anomaly detection and early-warning functions in a smart-port operational environment.
6. Result and Discussion
The following analyses also provide empirical evidence relevant to validating H1 (predictability of COG/SOG patterns) and H2 (risk association with deviation beyond ±1σ). Course Over Ground (COG) and Speed Over Ground (SOG) are selected as the primary analytical and predictive variables because they directly represent a vessel’s real-time navigational behavior and are among the most sensitive indicators of abnormal maneuvers within confined port environments such as the Second Harbor turning basin of the Port of Kaohsiung.
COG reflects the actual direction of a vessel’s movement relative to the Earth’s surface, integrating the combined effects of rudder angle, current, and wind. Sudden or continuous fluctuations in COG, especially when inconsistent with the expected turning trajectory, can indicate steering deviations, external environmental influences, or improper maneuvering, all of which may lead to potential collision risks in narrow waterways.
Similarly, SOG represents the true movement speed of the vessel relative to the seabed, providing critical information on how the vessel’s propulsion and environmental resistance (such as wind, tide, and current) interact. Abnormal increases or decreases in SOG within the turning basin often suggest inadequate engine control, over-speeding during turning, or loss of maneuvering stability, conditions that have been linked to several historical near-miss and collision incidents at Kaohsiung Port.
By jointly analyzing COG and SOG, the model can effectively detect deviations in both directional control and velocity management, capturing the dynamic interaction between vessel motion and environmental factors. These two parameters thus serve as core predictors in the Random Forest anomaly detection model, enabling real-time identification of abnormal navigation patterns and supporting early warning alerts for Vessel Traffic Service (VTS) operators.
6.1. Key Factor Analysis
Key factor analysis was conducted using the decision tree algorithm to identify the dominant parameters influencing vessel navigation behavior, specifically Course Over Ground (COG) and Speed Over Ground (SOG), within the Second Port of Kaohsiung. Both variables were categorized into five operational ranges to reveal the relationships between navigational and environmental factors under different maneuvering conditions.
- For COG, the classification ranges were defined as:
COG < 80.9°, 80.9–136.8°, 136.8–232.4°, 232.4–272.3°, and COG ≥ 272.3°.
Across all intervals, True Heading consistently emerged as the most significant influencing factor (Table 3), showing a strong correlation with vessel course changes. The Port Entry/Exit Direction ranked second, confirming that navigational heading adjustments were strongly linked to inbound and outbound movements. For example, when COG < 80.9°, vessels primarily enter the port in an east-northeast direction (represented by the line connecting points A and B in Figure 5), which corresponds well with the actual geometric configuration of the port’s approach channel. Meanwhile, longitude and latitude reflect vessel positions near the breakwater area, indicating that this range mostly represents the approach and turning phase during port entry. As vessel size and environmental constraints intensified within confined areas, SOG, draft, and vessel type became secondary but relevant influences, especially during turning or berthing operations.
Table 3.
COG Key Factor Analysis (COG < 80.9°).
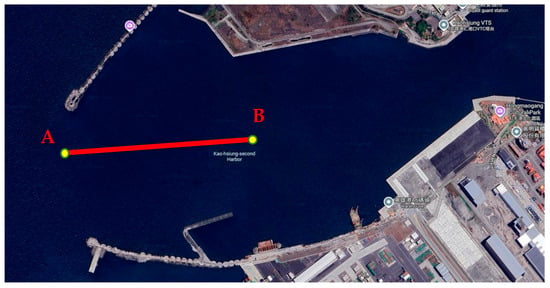
Figure 5.
Key Factor Interval Chart of COG.
- For SOG, the analysis divided speeds into five categories:
SOG < 5.7 knots, 5.7–7.3 knots, 7.3–8.9 knots, 8.9–10.6 knots, and SOG ≥ 10.6 knots.
The analysis results indicate that longitude and latitude are the most influential factors (Table 4), showing that variations in vessel speed are closely related to the vessel’s spatial position within the port area, particularly during the turning phase at the narrow entrance (as shown in Figure 6, the segment connecting points A and B, where vessel speed should remain moderate, typically not exceeding 6 knots). The next most significant factors are True Heading and COG, reflecting the interdependence between directional control and speed management. When SOG is low, vessels are generally in the turning or maneuvering preparation phase, whereas higher SOG values correspond to the acceleration phase prior to departure. Moreover, in higher-speed ranges, the importance of vessel length, width, and draught increases, indicating their influence on hydrodynamic stability and maneuverability.
Table 4.
SOG Key Factor Analysis (SOG < 5.7 kts).
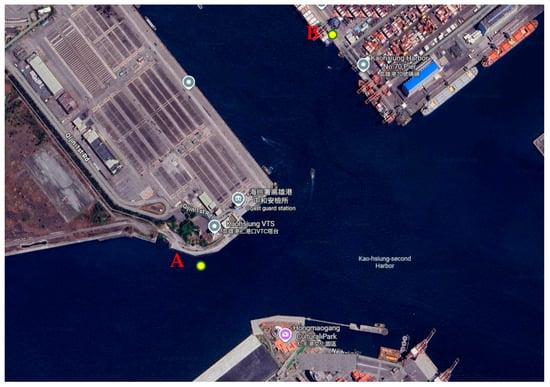
Figure 6.
Key Factor Interval Chart of SOG.
Synthesizing both analyses, the True Heading proved to be the primary determinant of COG, while Longitude and Latitude were most influential for SOG, representing the spatial dependency of vessel motion within the confined port basin. Notably, ship type appeared as a key factor in several COG intervals, particularly for container and tanker vessels, but was less influential in SOG analysis, implying that course control is more affected by vessel type than speed. Additionally, wind speed and direction did not appear as significant predictors, aligning with Kaohsiung’s favorable meteorological conditions and tug-assisted operations that mitigate environmental effects.
Overall, the key factor analysis demonstrates that vessel heading, position, and port direction are the dominant determinants of navigation patterns in Kaohsiung’s Second Port. These findings provide a clear foundation for developing data-driven early warning mechanisms that reflect real navigational behavior and operational risk within constrained harbor environments.
6.2. Cross-Validation Results of the Random Forest Models for SOG and COG
After training the Random Forest model with the selected dataset, separate cross-validation procedures were performed for both SOG and COG to evaluate model accuracy. The performance was assessed using two statistical indicators: Mean Absolute Error (MAE) and Root Mean Square Error (RMSE), calculated as follows
By applying the MAE and RMSE formulas to the Random Forest model established for SOG, the results are obtained as shown in Table 5. The same calculations were then applied to the COG model, with the results presented in Table 6. Correlation between predicted and actual values using the Random Forest model (Figure 7, COG; Figure 8, SOG), with the orange line representing the ideal value (y = x).
Table 5.
Cross-Validation Results of the Random Forest Model for COG.
Table 6.
Cross-Validation Results of the Random Forest Model for SOG.
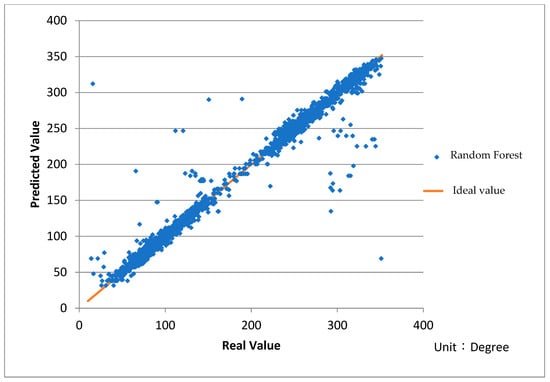
Figure 7.
Correlation between predicted and actual heading angle values (°). Using the Random Forest model, with the orange line representing the ideal value (y = x).
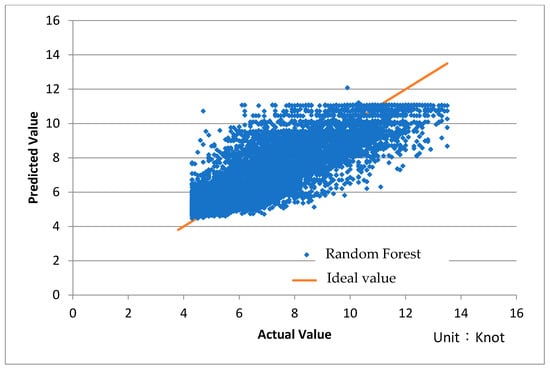
Figure 8.
Correlation between predicted and actual SOG values (knots). Using the Random Forest model, with the orange line representing the ideal value (y = x).
6.3. Benchmarking Against Simpler Predictive Models
To provide an objective and scientifically grounded assessment of predictive performance, this study incorporates three widely recognized baseline models, Multiple Linear Regression (MLR), k-Nearest Neighbors (k-NN), and a single Classification and Regression Tree (CART), as comparative benchmarks. These models represent standard reference points in maritime traffic prediction and enable a balanced evaluation of the proposed Random Forest framework. Although the original AIS dataset used for RF training is restricted, the baseline models can be reconstructed using the same variable structure, feature definitions, and cross-validation procedures described in Section 5. This reconstruction approach aligns with established practice in restricted-data safety studies and allows for a fair, methodologically consistent comparison.
Each model was implemented using standard configurations: MLR with ordinary least-squares estimation, k-NN with Euclidean distance and k = 5, and CART with Gini-based splitting. Performance was evaluated using the same metrics applied to the RF model, Mean Absolute Error (MAE) and Root-Mean-Square Error (RMSE), ensuring comparability across methods. The results are presented in Table 7.
Table 7.
Comparative benchmarking of the Random Forest model against baseline prediction models (MLR, k-NN, and CART) for COG and SOG estimation in confined-water maneuvering.
Although the baseline models exhibit error magnitudes that appear numerically close to those of the RF model, their performance deteriorates under the nonlinear and spatially dynamic conditions of confined-water maneuvering. MLR assumes global linearity and therefore cannot capture the abrupt heading and speed adjustments characteristic of turning basins. k-NN is highly sensitive to local data density and AIS reporting inconsistencies, producing unstable estimates when trajectories diverge. CART, while capable of simple nonlinear partitioning, suffers from high variance and limited generalization across different regions of the basin.
By contrast, the RF model integrates multiple nonlinear decision boundaries and aggregates them through ensemble averaging, yielding smoother prediction surfaces, lower residual variance, and stronger robustness against local trajectory fluctuations. These properties are critical in narrow turning-basin environments, where vessel motion often involves sudden yet operationally meaningful changes in COG and SOG. RF therefore provides a more stable and realistic representation of maneuvering behavior than any single baseline model.
Moreover, the value of RF extends beyond numerical accuracy. Its ensemble-based structure enables the construction of data-driven behavioral envelopes, allowing the system to detect deviations in COG and SOG that are operationally significant for early warning. By estimating expected trajectories under normal turning conditions and monitoring residuals in real time, RF supports a proactive VTS workflow capable of identifying anomalies several minutes before hazardous deviations become visually apparent. Simpler baseline models lack the nonlinear expressiveness and stability required to establish reliable deviation thresholds, rendering them unsuitable for this early-warning function.
Overall, these findings demonstrate that while simpler models can approximate general COG and SOG trends, they lack the nonlinear representational capacity, stability, and ensemble-based smoothing necessary for reliable predictive performance in confined turning-basin environments. The Random Forest model provides the most appropriate balance between predictive accuracy and operational reliability and forms a robust foundation for the anomaly-detection and early-warning mechanisms developed in this study. These benchmark results are intended as methodologically consistent references rather than exhaustive model optimization for each baseline.
6.4. Practical Case Validation
After training the model, actual collision case data were applied to validate its performance in identifying whether COG or SOG exhibited abnormal behavior during navigation. Two vessels were selected for verification, with corresponding wind speed and direction conditions included in the analysis. The results are presented below. In this study, a deviation exceeding one standard deviation (±1σ) from the model prediction was used as the early warning threshold; however, for enhanced safety, the threshold can be adjusted based on operational requirements.
- Case 1: M.V. CHINA STEEL INNOVATOR
Table 8 presents the basic information of M.V. CHINA STEEL INNOVATOR during the period of the SOG anomaly. As shown in Table 9, the vessel’s SOG exceeded the upper limit of the model’s predicted range during port entry. According to the model, an early warning anomaly was triggered for the vessel’s speed during this phase. The AIS track of the vessel was then visualized using GIS to identify the specific location where its actual speed surpassed the predicted range. As illustrated in Figure 9, the segment between Point A and Point B represents the vessel’s trajectory while entering the Kaohsiung Port Second Harbor breakwater, during which the SOG remained above the recommended range. It is evident that the vessel maintained an excessively high speed without significant deceleration in this area. To prevent potential loss of maneuvering control, the model recommends that the vessel reduce speed slightly when approaching the breakwater entrance.
Table 8.
Actual Case Data of M.V. CHINA STEEL INNOVATOR.
Table 8.
Actual Case Data of M.V. CHINA STEEL INNOVATOR.
| M.V. CHINA STEEL INNOVATOR (SOG Abnormal) | |||
| Date | 2018.06.19 | Ship’s Length | 299 m |
| Ship’s Width | 50 m | Draft | 15.1 m |
| Port Entry Direction | Starboard Turn on Port Entry | Avg. Wind Direction | 127° |
| Wind Speed | 2.8 m/s | ||
| Resulting Damages | The vessel grazed the starboard stern of the berthed ship M.V. EVER LADEN, which was moored at Terminal No. 5, resulting in the parting of M.V. EVER LADEN’s stern line. (Figure 10) | ||
Table 9.
Actual Data Verification of M.V. CHINA STEEL INNOVATOR from AIS.
Table 9.
Actual Data Verification of M.V. CHINA STEEL INNOVATOR from AIS.
| Position | Time | SOG from AIS (Knot) | Model-Predicted Value (Knot) | Standard Deviation (Knot) | Model-Recommended Safe Range (Knot) |
| A | 10:23:30 | 7.6 (Too Fast) | 6.3 | 0.8 | 7.1–5.5 |
| B | 10:25:10 | 6.1 (Too Fast) | 5.2 | 0.5 | 5.7–4.7 |

Figure 9.
Early Warning Diagram of Excessive Port Entry Speed of M.V. CHINA STEEL INNOVATOR. Points A (10:23:30) and B (10:25:10) indicate successive AIS positions where the vessel’s SOG remained above the model-recommended safe envelope while approaching the breakwater entrance.

Figure 10.
A collision occurred between M.V. CHINA STEEL INNOVATOR and M.V. EVER LADEN. (Image source: Central News Agency, CNA).
- Case 2: M.V. TAIPEI TRIUMPH
Next, M.V. TAIPEI TRIUMPH was used as another case study to verify the model’s ability to detect COG anomalies. Table 10 presents the basic information about M.V. TAIPEI TRIUMPH at the time of the incident. As shown in Table 11, the vessel’s COG was lower than the predicted range, and its SOG was also relatively low, resulting in reduced turning performance. The vessel’s AIS track was visualized using GIS, as illustrated in Figure 11. It can be observed that at Point A, the model had already triggered an early warning for abnormal COG, and between Points A and B, the vessel exhibited a significant turning angle. According to the model’s recommendation, maintaining a turning angle between approximately 79.1° and 75.5° at Point A would allow the vessel to keep a safer distance from the shoreline.
Table 10.
Actual Case Data of M.V. TAIPEI TRIUMPH.
Table 11.
Actual Data Verification of M.V. TAIPEI TRIUMPH from AIS.
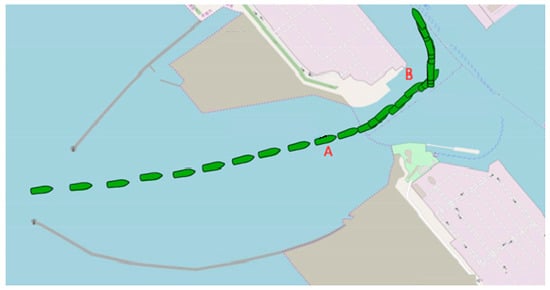
Figure 11.
Early warning diagram of insufficient turning of M.V. TAIPEI TRIUMPH. Points A (15:18:40) and B (15:21:05) indicate successive AIS positions where the vessel’s COG progressively deviates from the model-derived safe turning envelope.
6.5. Limitations Related to Missing Environmental Variables
Although the proposed model exhibits strong predictive capability, several key environmental and operational variables could not be incorporated due to data availability constraints. High-resolution measurements of tides, currents, waves, and visibility were unavailable at the temporal resolution required for confined-water maneuvering analysis; most existing records are reported at hourly or multi-hour intervals, and interpolating such coarse data would introduce errors exceeding their potential modeling benefits.
Tugboat assistance represents another major influence on vessel motion in narrow ports. Because tug commands and bollard-force actions are not captured in AIS kinematic fields, and synchronized tug-dispatch logs were not accessible, these effects could not be explicitly modeled. Their absence likely contributes to the residual COG prediction errors observed in the results. Future research should incorporate hydrodynamic simulations, real-time port sensor networks, and detailed tug-operation datasets to enhance robustness.
In addition, GIS visualizations used in this study were simplified for analytical clarity. Standard cartographic elements such as scale bars, north arrows, and coordinate grids may be added in operational deployment to strengthen interpretability.
6.6. Threshold Sensitivity, Mathematical Formalization, and Operational Customization
To provide a clear and reproducible basis for defining “safe ranges” in confined-water maneuvering, the anomaly-detection mechanism is mathematically formalized using the residuals between actual and predicted vessel behavior. Let Yt denote the observed COG or SOG at time t, and Ŷt denote the corresponding Random Forest prediction. The residual is expressed as:
rt = Yt − Ŷt
Under normal maneuvering conditions, the residuals form a stable distribution centered near zero. Let N denote the number of residual samples used in the training dataset. The standard deviation of residuals is computed as:
The normal maneuvering envelope, or “safe range,” is therefore defined by:
Residuals exceeding this envelope are classified as anomalous and indicate potential navigational deviation. As shown in Equation (12).
This mathematical mapping provides a transparent and reproducible link from RF predictions to operationally interpretable safe/unsafe behavior, addressing the need for formalization noted by the reviewer.
It is important to emphasize that the ±1σ threshold adopted in this study is not intended as a universal standard. Consultations with VTS operators indicate that early detection of moderate deviations is often more operationally valuable than rare-event detection in confined turning basins. Thus, ±1σ serves as a conservative baseline from which sensitivity may be calibrated according to hydrodynamic complexity, traffic density, or observed maneuvering patterns. Different ports may require wider or narrower envelopes depending on local basin geometry, environmental variability, or acceptable alert frequency.
To mitigate unnecessary alert fatigue, the framework incorporates temporal persistence filtering, ensuring that only sustained deviations trigger warnings. As a result, the system supports full threshold customization and can be readily adapted to real-world VTS operations while maintaining the mathematical rigor necessary for scientific reproducibility.
7. Conclusions and Recommendations
This study developed a predictive early-warning framework for vessel maneuvering safety in the Second Port of Kaohsiung by integrating AIS big data, VTS operational logic, and machine-learning–based anomaly detection. Through the construction of spatially dependent COG and SOG patterns and the application of the Random Forest algorithm, the model successfully captured the characteristic motion behavior of large vessels navigating the confined turning basin. The resulting predictions enable the identification of deviations in speed and heading that may indicate emerging navigational hazards. Compared with traditional post-event analyses that rely on visual inspection, radar observation, or retrospective accident reconstruction, the proposed approach provides a proactive, data-driven mechanism capable of offering real-time support for VTS operations.
By incorporating port geometry, turning-radius constraints, and local maneuvering characteristics into the modeling process, this study contributes a port-specific early-warning method that has been largely overlooked in existing AIS anomaly-detection literature. The results demonstrate that the model can provide actionable insights to enhance navigational safety, reduce pilot and VTS workload, and improve risk awareness during critical turning maneuvers. The case studies further confirm that the system can detect abnormal patterns minutes before they become operationally apparent, demonstrating practical feasibility for real-world implementation.
- Hypothesis Validation
The empirical findings strongly support both proposed hypotheses.
H1, which posits that vessel maneuvers in the turning basin follow predictable and statistically learnable patterns, was validated through high predictive accuracy and stable model performance across cross-validation folds and independent test data. The consistency of RF predictions confirms that COG and SOG variations are not random but follow spatially and behaviorally structured patterns that can be learned through supervised modeling.
Similarly, H2, which states that deviations beyond the ±1σ residual envelope are associated with increased navigational risk, was verified through both the quantitative evaluation and real-world case analyses. In the China Steel Innovator and Taipei Triumph cases, deviations surpassed the ±1σ boundary well before hazardous course divergence became visually identifiable on AIS plots. This demonstrates that the ±1σ threshold serves as a meaningful, data-driven indicator of abnormal behavior and provides a robust foundation for early-warning operations in confined port environments.
Together, the validation of H1 and H2 confirms that the proposed framework effectively distinguishes between normal and abnormal turning-basin trajectories and holds substantial operational value for predictive VTS-based monitoring.
While the absolute prediction errors are not extremely small, particularly for COG, the operational value of the system is derived from its ability to distinguish normal maneuvering patterns from abnormal ones rather than from precision prediction of exact vessel states. In confined port environments, VTS operators do not require perfect numerical accuracy; instead, they need reliable indicators that a vessel is deviating from its expected turning profile. The RF-generated residual envelope accomplishes this by providing consistent thresholds that highlight emerging irregularities in vessel movement. Even moderate prediction errors are sufficient as long as the model exhibits stable behavior and clear separation between normal and abnormal trajectories, which the results of this study demonstrate. This makes the system highly practical for real-time monitoring, where early recognition of deviation trends is far more critical than exact numerical prediction. The proposed system can be seamlessly integrated into existing VTS workflows by embedding the RF-based deviation envelope within real-time VTS displays, enabling operators to receive automated warnings alongside radar, AIS, and CCTV feeds. The system requires no changes to existing communication protocols and serves as a decision-support layer that enhances, rather than replaces, current VTS operations.
- Future Research Directions
Although the proposed framework demonstrates strong predictive capability and operational relevance, several opportunities exist for further advancement:
- Integration of Hydrodynamic and Environmental Models
- Future work may incorporate high-resolution tidal currents, under-keel clearance, and hydrodynamic flow fields derived from numerical simulations or port sensors. Such data can enrich model sensitivity, especially under complex sea–current interactions.
- Advanced Machine-Learning and Deep-Learning Architectures
- Hybrid models combining Random Forest with recurrent neural networks (RNNs), GRU/LSTM, or temporal convolutional networks may better capture sequential dependencies in AIS data and improve early-warning lead time.
- Real-Time VTS Implementation and Human–Machine Interaction
- Deploying the model in a live VTS environment would enable the development of adaptive alert thresholds, operator feedback loops, and interface designs optimized for decision-making during high-traffic operations.
- Generalization to Other Confined-Water Ports
- Applying the methodology to additional ports, such as Hong Kong, Busan, Rotterdam, or Singapore, would help assess the transferability of confined-water behavioral envelopes and enhance the system’s general applicability.
- Explainable AI (XAI) for Operational Transparency
- Future research may expand SHAP or rule-based interpretations to clarify how environmental factors, ship particulars, and turning geometry contribute to risk signatures, thereby improving VTS operator trust and adoption.
- Integration With Smart Port Ecosystems
- The framework can be adapted to collaborate with digital twins, port automation systems, and multi-source sensor fusion platforms as part of broader smart port development initiatives.
These directions provide technically actionable extensions that can be operationalized in future work, ensuring that the proposed framework continues to evolve in both scientific rigor and practical applicability.
- Final Remarks
Overall, this research demonstrates that integrating AIS-based predictive analytics with VTS operational needs can significantly enhance navigational safety in constrained port environments. By validating the statistical learnability of vessel behaviors and the operational meaning of deviation-based risk envelopes, the proposed system provides a scalable and practical approach for next-generation smart port safety management. The framework not only advances academic understanding of maneuvering patterns in confined waters but also offers concrete benefits for real-world port operations, supporting more proactive, informed, and resilient maritime traffic management.
Author Contributions
Conceptualization, M.-C.T. and S.-H.S.; investigation, S.-H.S.; methodology, M.-C.T. and S.-H.S.; data curation and analysis, S.-H.S. and T.-H.C.; validation, T.-H.C.; visualization, S.-H.S.; writing—original draft preparation, S.-H.S.; writing—review and editing, M.-C.T. and T.-H.C.; supervision, M.-C.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Science and Technology Council, Taiwan, under grant number 111-2410-H-992-027. The APC was also funded under the same grant.
Data Availability Statement
The datasets used in this study were independently collected and compiled by the authors and are not publicly available. If access to the data is required, requests may be directed to the corresponding author.
Acknowledgments
During the preparation of this manuscript, the authors used ChatGPT (OpenAI, GPT-5.1) to translate the original text written in Chinese into English and to refine the wording. The authors have carefully reviewed and edited all AI-assisted content and take full responsibility for the final version of this publication.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Shin, G.-H.; Jung, M. Preparing VTS for the MASS Era: A Machine Learning-Based VTSO Recruitment Model. J. Mar. Sci. Eng. 2025, 13, 2127. [Google Scholar] [CrossRef]
- Shin, G.-H.; Yang, H. Maritime Accident Prediction in Busan Port Using Machine Learning: An Integrated Approach with Maritime Accident Reports and VTS Data. Ocean Eng. 2025, 316, 119968. [Google Scholar] [CrossRef]
- Wang, Y.-F.; Tu, Y.-C.; Liu, Y.-C.; Chao, C.-T.; Chen, X.; Chen, Y.; Hwang, J.-S.; Lin, Y.-J. Digital-Twin-Based Hazardous Cargo Management and Risk Prevention Using CNN–LSTM Prediction in Smart Ports. Front. Mar. Sci. 2024, 11, 1455522. [Google Scholar]
- Bartulović, D. Predictive Safety Management System Development. Trans. Marit. Sci. 2021, 10, 135–146. [Google Scholar] [CrossRef]
- The Swedish Club. Focus: Grounding. Loss Prevention Publication. 2020. Available online: https://www.swedishclub.com/news/loss-prevention/focus-grounding/ (accessed on 27 November 2025).
- Australian Maritime Safety Authority (AMSA). Regulated Australian and Foreign Flagged Vessels—Marine Incident Annual Report 2019. Available online: https://www.amsa.gov.au/incident-trends-severity (accessed on 27 November 2025).
- Huang, J.-C.; Ung, S.-T. Risk Assessment and Traffic Behaviour Evaluation of Ships Using AIS Data. J. Mar. Sci. Eng. 2023, 11, 2297. [Google Scholar] [CrossRef]
- Kang, M.J.; Zohoori, S.; Hamidi, M.; Wu, X. Study of narrow waterways congestion based on Automatic Identification System (AIS) data: A case study of Houston Ship Channel. J. Ocean Eng. Sci. 2022, 7, 578–595. [Google Scholar] [CrossRef]
- Ma, Q.; Tang, H.; Liu, C.; Zhang, M.; Zhang, D.; Liu, Z.; Zhang, L. A big data analytics method for the evaluation of maritime traffic safety using Automatic Identification System data. Ocean Coast. Manag. 2024, 251, 107077. [Google Scholar] [CrossRef]
- Zhu, W.; Wang, S.; Liu, S.; Yang, L.; Zheng, X.; Li, B.; Zhang, L. Dynamic Multi-Period Maritime Accident Susceptibility Assessment Based on AIS Data and Random Forest Model. J. Mar. Sci. Eng. 2023, 11, 1935. [Google Scholar] [CrossRef]
- Kabir, M.; Kang, M.J.; Wu, X.; Hamidi, M. Study on U-turn behavior of vessels in narrow waterways based on AIS data. Ocean Eng. 2022, 246, 110608. [Google Scholar] [CrossRef]
- IMO Vessel Traffic Services. Official Guidance Page. Available online: https://www.imo.org/en/ourwork/safety/pages/vesseltrafficservices.aspx?utm_source=chatgpt.com (accessed on 10 November 2025).
- Tsou, M.-C. Discovering knowledge from AIS database for application in VTS and marine traffic research. J. Navig. 2010, 63, 143–158. [Google Scholar]
- Mou, J.; Zhou, C.; Du, Y.; Tang, W. Evaluate VTS benefits: A case study of Zhoushan Port. Int. J. E-Navig. Marit. Econ. 2015, 2, 22–31. [Google Scholar] [CrossRef]
- Praetorius, G. Vessel Traffic Service (VTS): A Maritime Information Service or Traffic Control System? Ph.D. Thesis, Department of Shipping and Marine Technology, Chalmers University of Technology, Gothenburg, Sweden, 2014. [Google Scholar]
- Durczak, W.; Filina-Dawidowicz, L. A review of Vessel Traffic Services systems operating in Poland. Appl. Sci. 2025, 15, 797. [Google Scholar] [CrossRef]
- Liu, D.; Wang, X.; Cai, Y.; Liu, Z.; Liu, Z. A novel framework of real-time regional collision risk prediction based on the RNN approach. J. Mar. Sci. Eng. 2020, 8, 224. [Google Scholar] [CrossRef]
- Pallotta, G.; Vespe, M.; Bryan, K. Vessel Pattern Knowledge Discovery from AIS Data: A Framework for Anomaly Detection and Route Prediction. Entropy 2013, 15, 2218–2245. [Google Scholar] [CrossRef]
- Zissis, D.; Xidias, E.K.; Lekkas, D. Real-time vessel behavior prediction. Evol. Syst. 2016, 7, 29–40. [Google Scholar]
- Zhao, L.; Shi, G. Maritime Anomaly Detection using Density-based Clustering and Recurrent Neural Network. J. Navig. 2019, 72, 894–916. [Google Scholar] [CrossRef]
- Wang, L.; Chen, P.; Chen, L.; Mou, J. Ship AIS trajectory clustering: An HDBSCAN-based approach. J. Mar. Sci. Eng. 2021, 9, 566. [Google Scholar] [CrossRef]
- Ribeiro, C.V.; Paes, A.; de Oliveira, D. AIS-based maritime anomaly traffic detection: A review. Expert Syst. Appl. 2023, 231, 120561. [Google Scholar] [CrossRef]
- Wolsing, K.; Roepert, L.; Bauer, J.; Wehrle, K. Anomaly detection in maritime AIS tracks: A review of recent approaches. J. Mar. Sci. Eng. 2022, 10, 112. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Li, G.; Zhang, Z.; Liu, Y. Harnessing the power of machine learning for AIS data–driven maritime research: A comprehensive review. Transp. Res. Part E Logist. Transp. Rev. 2024, 183, 103426. [Google Scholar]
- Liu, Z.; Zhang, B.; Zhang, M.; Wang, H.; Fu, X. A quantitative method for the analysis of ship collision risk using AIS data. Ocean Eng. 2023, 272, 113906. [Google Scholar] [CrossRef]
- Maljković, M.; Pavić, I.; Meštrović, T.; Perkovič, M. Ship Maneuvering in Shallow and Narrow Waters: Predictive Methods and Model Development Review. J. Mar. Sci. Eng. 2024, 12, 1450. [Google Scholar] [CrossRef]
- Zhang, C.; Bin, J.; Wang, W.; Peng, X.; Wang, R.; Halldearn, R.; Liu, Z. AIS data driven general vessel destination prediction: A random forest based approach. Transp. Res. Part C Emerg. Technol. 2020, 118, 102729. [Google Scholar] [CrossRef]
- Cheng, L.-H.; Wang, H.-Y. Study on motion prediction analysis of large vessels entering Kaohsiung Port Second Harbor. J. Mar. Sci. Technol. 2025, 33, 14–22. [Google Scholar] [CrossRef]
- Munim, Z.H.; Sørli, M.A.; Kim, H.; Alon, I. Predicting maritime accident risk using automated machine learning. Reliab. Eng. Syst. Saf. 2024, 248, 110148. [Google Scholar] [CrossRef]
- Xue, J.; Yang, P.; Li, Q.; Song, Y.; van Gelder, P.H.A.J.M.; Papadimitriou, E.; Hu, H. Machine learning in maritime safety for autonomous shipping: A bibliometric review and future trends. J. Mar. Sci. Eng. 2025, 13, 746. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- UNIS. Kaohsiung, Taiwan. Available online: https://www.unisco.com/international-ports/kaohsiung-taiwan (accessed on 10 November 2025).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).