
Risk Coupling Assessment of Vehicle Scheduling for Shipyard in a Complicated Road Environment



Abstract
1. Introduction
Literature Review
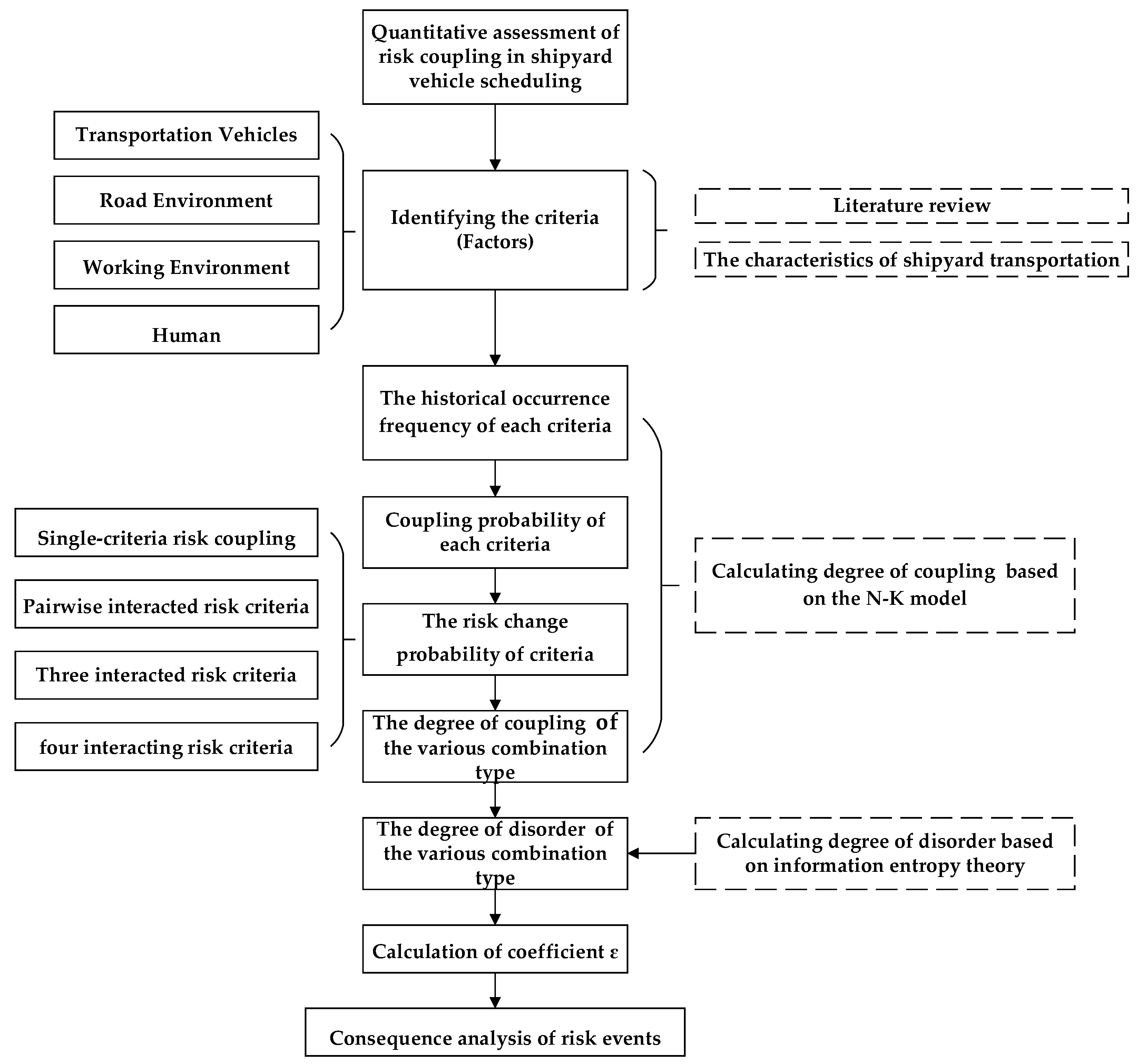
2. Materials and Methods
2.1. Hybrid Risk Coupling Model Based on Risk Matrix Approach
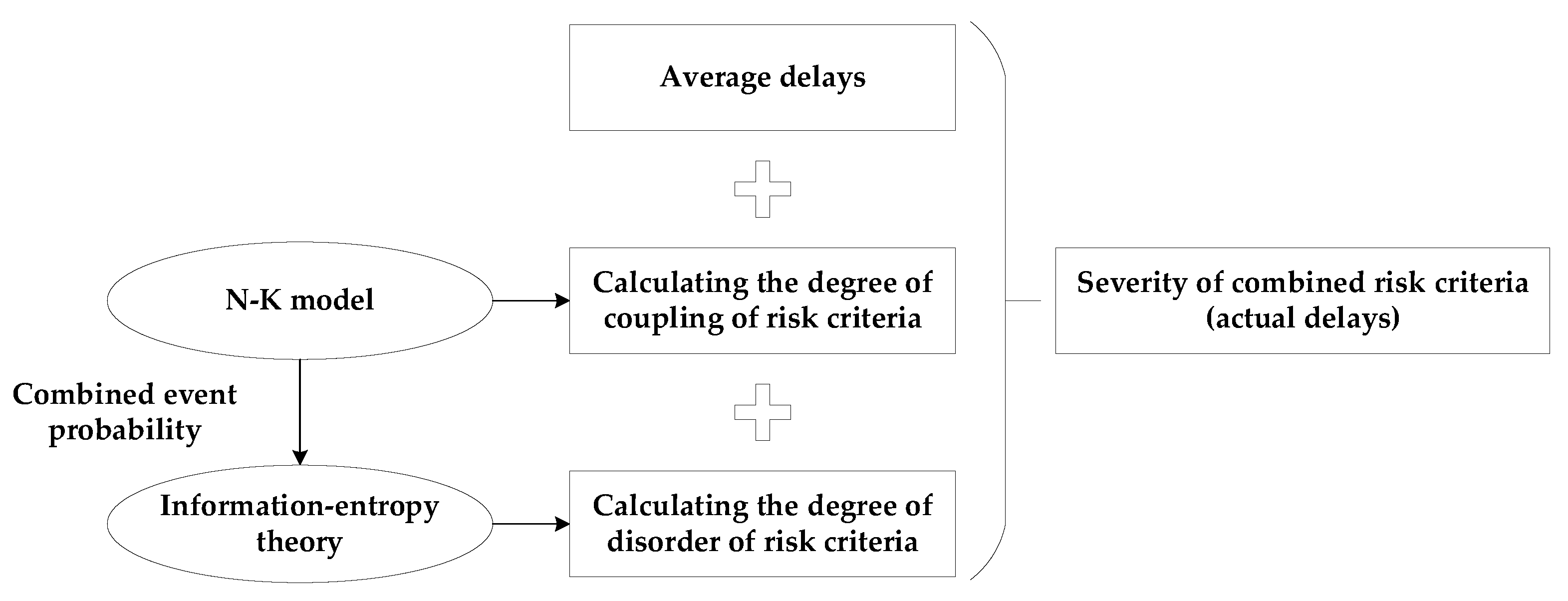
2.2. Calculating the Degree of Coupling of Risk Criteria Based on the N-K Model
2.3. Calculating the Degree of Disorder of Risk Criteria Based on Information Entropy Theory
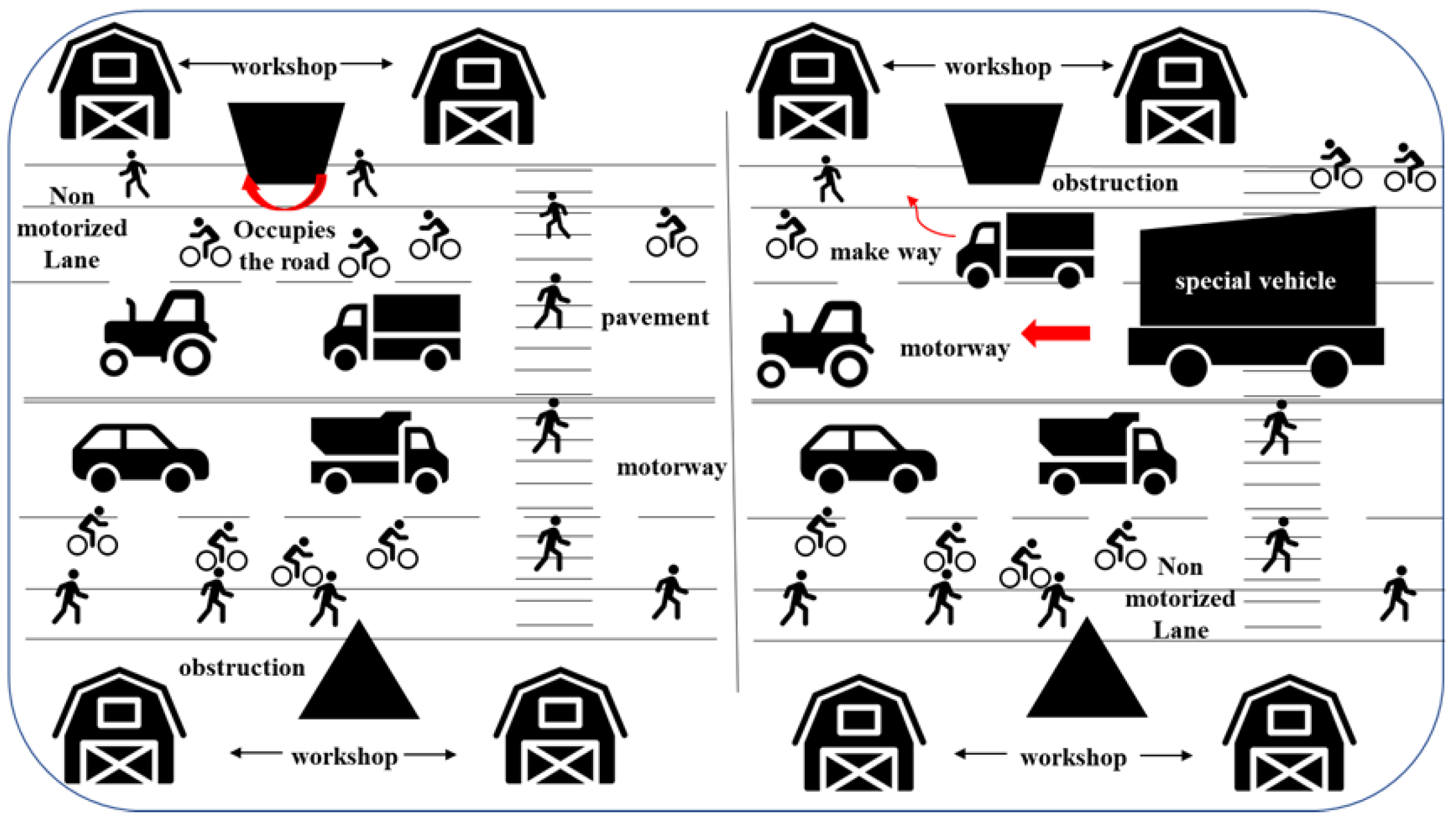
3. Analysis of the Criteria and Factors for Risk Events in VSS
4. Analysis of Coupling of Risk Criteria in VSS
4.1. Definition of Risk Criteria Coupling in VSS
4.2. Definition of Risk Criteria Coupling in VSS
5. Case Application and Results
5.1. Risk Database
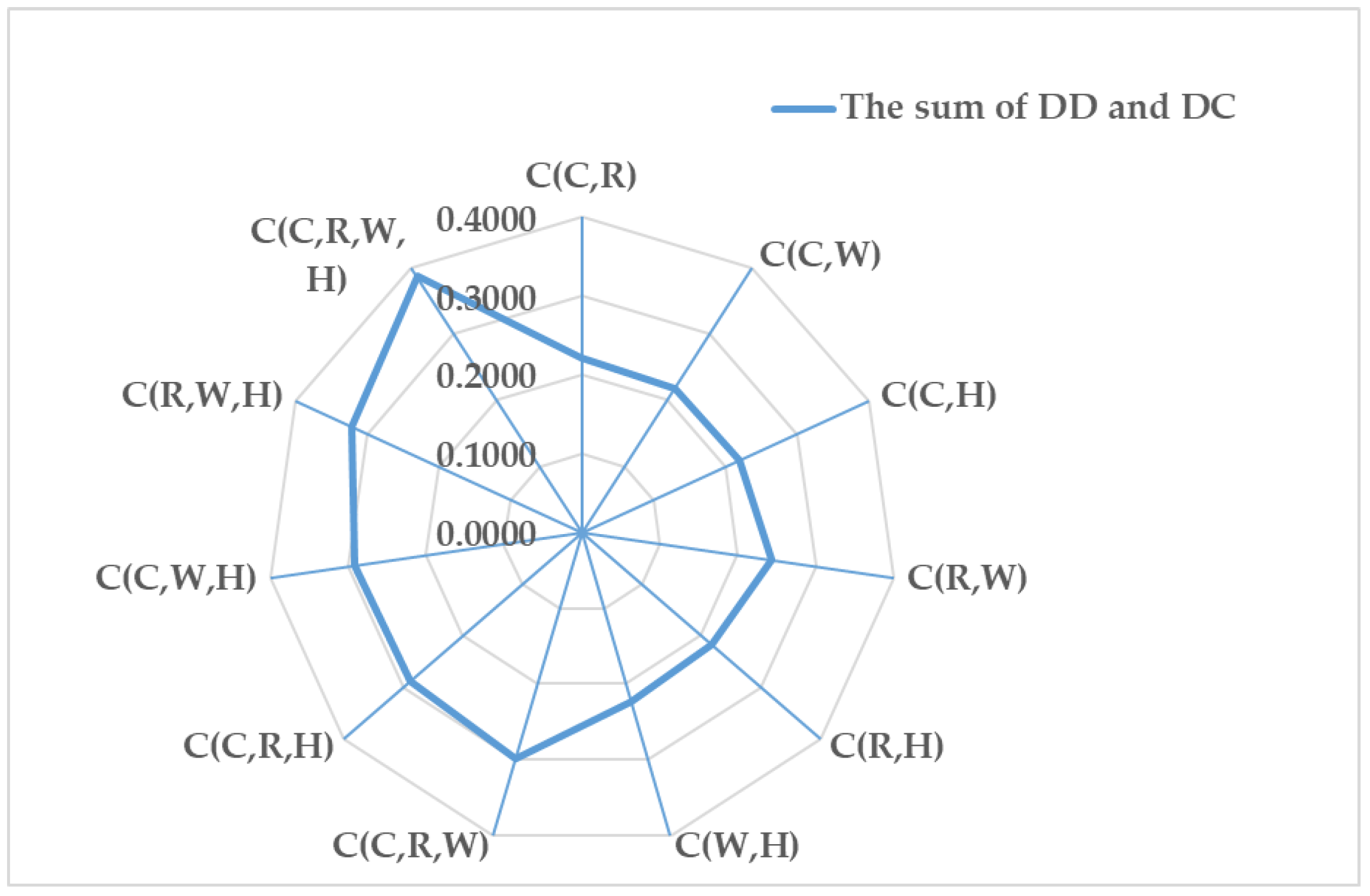
5.2. Analysis of Coupling Value and Disorder Value
5.3. Calculation of Coefficient
5.4. Consequence Analysis of Risk Criteria
6. Conclusions and Future Research Directions
- (1)
- The risk level of the system increases as the number of risk criteria increases. Therefore, managers should avoid developing vehicle scheduling plans during times when multiple risk criteria occur.
- (2)
- Roadway environments and working environments have a significant and substantial impact on the execution of vehicle scheduling tasks. When developing vehicle scheduling plans, it is imperative to take into account the conditions of the roadway environment. Given the ongoing nature of vehicle scheduling, it is advisable to reconsider and potentially modify the vehicle distribution plan when risk criteria manifest in real-time.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dixit, V.; Verma, P.; Raj, P.; Sharma, M. Resource and time criticality based block spatial scheduling in a shipyard under uncertainty. Int. J. Prod. Res. 2018, 56, 6993–7007. [Google Scholar] [CrossRef]
- Ge, Y.; Wang, A.M. Spatial scheduling for irregularly shaped blocks in shipbuilding. Comput. Ind. Eng. 2021, 152, 106985. [Google Scholar] [CrossRef]
- Tao, N.R.; Jiang, Z.H.; Qu, S.P. Assembly block location and sequencing for flat transporters in a planar storage yard of shipyards. Int. J. Prod. Res. 2013, 51, 4289–4301. [Google Scholar] [CrossRef]
- Zheng, Y.H.; Ke, J.C.; Wang, H.Y. Risk Propagation of Concentralized Distribution Logistics Plan Change in Cruise Construction. Processes 2021, 9, 1398. [Google Scholar] [CrossRef]
- Sahin, B.; Yazir, D.; Soylu, A.; Yip, T.L. Improved fuzzy AHP based game-theoretic model for shipyard selection. Ocean Eng. 2021, 233, 109060. [Google Scholar] [CrossRef]
- Khalilzadeh, M.; Banihashemi, S.A.; Bozanic, D. A Step-By-Step Hybrid Approach Based on Multi-Criteria Decision-Making Methods And A Bi-Objective Optimization Model To Project Risk Management. Decis. Mak. Appl. Manag. Eng. 2024, 7, 442–472. [Google Scholar] [CrossRef]
- Kwon, B.; Lee, G.M. Spatial scheduling for large assembly blocks in shipbuilding. Comput. Ind. Eng. 2015, 89, 203–212. [Google Scholar] [CrossRef]
- Cui, Z.M.; Wang, H.Y.; Xu, J. Risk Assessment of Concentralized Distribution Logistics in Cruise-Building Imported Materials. Processes 2023, 11, 859. [Google Scholar] [CrossRef]
- Alfnes, E.; Gosling, J.; Naim, M.; Dreyer, H.C. Exploring systemic factors creating uncertainty in complex engineer-to-order supply chains: Case studies from Norwegian shipbuilding first tier suppliers. Int. J. Prod. Econ. 2021, 240, 108211. [Google Scholar] [CrossRef]
- Crispim, J.; Fernandes, J.; Rego, N. Customized risk assessment in military shipbuilding. Reliab. Eng. Syst. Saf. 2020, 197, 106809. [Google Scholar] [CrossRef]
- Adams, N.; Chisnall, R.; Pickering, C.; Schauer, S.; Peris, R.C.; Papagiannopoulos, I. Guidance for ports: Security and safety against physical, cyber and hybrid threats. J. Transp. Secur. 2021, 14, 197–225. [Google Scholar] [CrossRef]
- Brown, D.F.; Dunn, W.E. Application of a quantitative risk assessment method to emergency response planning. Comput. Oper. Res. 2007, 34, 1243–1265. [Google Scholar] [CrossRef]
- Koçar, O.; Dizdar, E. A risk assessment model for traffic crashes problem using fuzzy logic: A case study of Zonguldak, Turkey. Transp. Lett. Int. J. Transp. Res. 2022, 14, 492–502. [Google Scholar] [CrossRef]
- Li, Y.T.; Xu, D.D.; Shuai, J. Real-time risk analysis of road tanker containing flammable liquid based on fuzzy Bayesian network. Process Saf. Environ. Prot. 2020, 134, 36–46. [Google Scholar] [CrossRef]
- Bianco, L.; Caramia, M.; Giordani, S. A bilevel flow model for hazmat transportation network design. Transp. Res. Part C-Emerg. Technol. 2009, 17, 175–196. [Google Scholar] [CrossRef]
- Goksu, S.; Arslan, O. A quantitative dynamic risk assessment for ship operation using the fuzzy FMEA: The case of ship berthing/unberthing operation. Ocean Eng. 2023, 287, 115548. [Google Scholar] [CrossRef]
- Qiu, S.Q.; Sacile, R.; Sallak, M.; Schoen, W. On the application of Valuation-Based Systems in the assessment of the probability bounds of Hazardous Material transportation accidents occurrence. Saf. Sci. 2015, 72, 83–96. [Google Scholar] [CrossRef]
- Ahmadi, O.; Mortazavi, S.B.; Pasdarshahri, H.; Mohabadi, H.A. Consequence analysis of large-scale pool fire in oil storage terminal based on computational fluid dynamic (CFD). Process Saf. Environ. Prot. 2019, 123, 379–389. [Google Scholar] [CrossRef]
- Noguchi, H.; Hienuki, S.; Fuse, M. Network theory-based accident scenario analysis for hazardous material transport: A case study of liquefied petroleum gas transport in japan. Reliab. Eng. Syst. Saf. 2020, 203, 107107. [Google Scholar] [CrossRef]
- Khanmohamadi, M.; Bagheri, M.; Khademi, N.; Ghannadpour, S.F. A security vulnerability analysis model for dangerous goods transportation by rail—Case study: Chlorine transportation in Texas-Illinois. Saf. Sci. 2018, 110, 230–241. [Google Scholar] [CrossRef]
- Li, Y.L.; Yang, Q.; Chin, K.S. A decision support model for risk management of hazardous materials road transportation based on quality function deployment. Transp. Res. Part D-Transp. Environ. 2019, 74, 154–173. [Google Scholar] [CrossRef]
- Tao, L.L.; Chen, L.W.; Ge, D.C.; Yao, Y.T.; Ruan, F.; Wu, J.; Yu, J. An integrated probabilistic risk assessment methodology for maritime transportation of spent nuclear fuel based on event tree and hydrodynamic model. Reliab. Eng. Syst. Saf. 2022, 227, 108726. [Google Scholar] [CrossRef]
- Oturakci, M.; Dagsuyu, C. Integrated environmental risk assessment approach for transportation modes. Hum. Ecol. Risk Assess. 2020, 26, 384–393. [Google Scholar] [CrossRef]
- Satish, A.S.; Mangal, A.; Churi, P. A systematic review of passenger profiling in airport security system: Taking a potential case study of CAPPS II. J. Transp. Secur. 2023, 16, 8. [Google Scholar] [CrossRef]
- Yang, L.; Luo, X.K.; Zuo, Z.J.; Zhou, S.P.; Huang, T.Y.; Luo, S. A novel approach for fine-grained traffic risk characterization and evaluation of urban road intersections. Accid. Anal. Prev. 2023, 181, 106934. [Google Scholar] [CrossRef] [PubMed]
- Shankar, R.; Choudhary, D.; Jharkharia, S. An integrated risk assessment model: A case of sustainable freight transportation systems. Transp. Res. Part D-Transp. Environ. 2018, 63, 662–676. [Google Scholar] [CrossRef]
- Karatzetzou, A.; Stefanidis, S.; Stefanidou, S.; Tsinidis, G.; Pitilakis, D. Unified hazard models for risk assessment of transportation networks in a multi-hazard environment. Int. J. Disaster Risk Reduct. 2022, 75, 102960. [Google Scholar] [CrossRef]
- Chakrabarti, U.K.; Parikh, J.K. Applying HAZAN methodology to hazmat transportation risk assessment. Process Saf. Environ. Prot. 2012, 90, 368–375. [Google Scholar] [CrossRef]
- Yang, H.Y.; Zhao, X.H.; Luan, S.; Chai, S.S. A traffic dynamic operation risk assessment method using driving behaviors and traffic flow Data: An empirical analysis. Expert Syst. Appl. 2024, 249, 123619. [Google Scholar] [CrossRef]
- Ambituuni, A.; Amezaga, J.M.; Werner, D. Risk assessment of petroleum product transportation by road: A framework for regulatory improvement. Saf. Sci. 2015, 79, 324–335. [Google Scholar] [CrossRef]
- Ni, H.H.; Chen, A.; Chen, N. Some extensions on risk matrix approach. Saf. Sci. 2010, 48, 1269–1278. [Google Scholar] [CrossRef]
- Božanić, D.; Pamučar, D.; Komazec, N. Applying D numbers in risk assessment process: General approach. J. Decis. Anal. Intell. Comput. 2023, 3, 286–295. [Google Scholar] [CrossRef]
- Huang, W.C.; Yin, D.Z.; Xu, Y.F.; Zhang, R.; Xu, M.H. Using N-K Model to quantitatively calculate the variability in Functional Resonance Analysis Method. Reliab. Eng. Syst. Saf. 2021, 217, 108058. [Google Scholar] [CrossRef]
- Zhang, W.J.; Zhang, Y.J. Research on coupling mechanism of intelligent ship navigation risk factors based on N-K model. J. Mar. Sci. Technol. 2023, 28, 195–207. [Google Scholar] [CrossRef]
- Pele, D.T.; Lazar, E.; Dufour, A. Information Entropy and Measures of Market Risk. Entropy 2017, 19, 226. [Google Scholar] [CrossRef]
- Huang, W.C.; Zhang, Y.; Yu, Y.C.; Xu, Y.F.; Xu, M.H.; Zhang, R.; De Dieu, G.J.; Yin, D.Z.; Liu, Z.R. Historical data-driven risk assessment of railway dangerous goods transportation system: Comparisons between Entropy Weight Method and Scatter Degree Method. Reliab. Eng. Syst. Saf. 2021, 205, 107236. [Google Scholar] [CrossRef]
- Shaaban, K.; Muley, D.; Mohammed, A. Analysis of illegal pedestrian crossing behavior on a major divided arterial road. Transp. Res. Part F Traffic Psychol. Behav. 2018, 54, 124–137. [Google Scholar] [CrossRef]
- Zainuddin, N.I.; Arshad, A.K.; Hamidun, R.; Haron, S.; Hashim, W. Influence of road and environmental factors towards heavy-goods vehicle fatal crashes. Phys. Chem. Earth Parts A/B/C 2022, 129, 103342. [Google Scholar] [CrossRef]
- Zhang, R.C.; Wen, X.; Cao, H.Q.; Cui, P.F.; Chai, H.; Hu, R.B.; Yu, R.Y. High-risk event prone driver identification considering driving behavior temporal covariate shift. Accid. Anal. Prev. 2024, 199, 107526. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Incidents | Maintenance Cycle | Type | Delay Time (min) |
|---|---|---|---|---|
| 1 | Equipment failure | 9 h and 20 min | Maintenance | 31 |
| 2 | Maintenance | 1 days and 40 min | Maintenance | 32 |
| 3 | Oil pipe bursting | 23 h and 15 min | Oil leakage | 30 |
| 4 | Maintenance | 7 h and 52 min | Maintenance | 26 |
| 5 | Repairing water tanks | 5 days, 7 h and 45 min | Tank | 30 |
| 6 | High water temperature | 5 days, 23 h and 10 min | Tank | 35 |
| 7 | Loss of steering | 6 h and 45 min | Steering arm | 30 |
| 8 | Loss of steering | 2 days, 7 h and 32 min | Steering arm | 26 |
| 9 | Loss of steering | 7 h and 51 min | Steering arm | 28 |
| 10 | Maintenance of air conditioners | 59 min | Maintenance | 27 |
| 11 | Replacement parts | 18 h and 44 min | Maintenance | 28 |
| 12 | Flat tire | 12 h and 43 min | Steering arm | 29 |
| 13 | Oil leakage from cylinder | 3 days, 21 h and 11 min | Oil leakage | 32 |
| 14 | Maintenance | 5 h and 54 min | Maintenance | 32 |
| 15 | Oil leakage from cylinder | 2 days, 12 h and 2 min | Oil leakage | 34 |
| 16 | No signal | 9 h and 59 min | Network | 30 |
| No. | Incidents | Type | Delay Time (min) |
|---|---|---|---|
| 1 | Congestion caused by other vehicles | Other vehicles | 10 |
| 2 | Congestion caused by pedestrians | Pedestrians | 10 |
| 3 | Congestion caused by obstacles | Obstructions | 14 |
| 4 | Congestion caused by other vehicles | Other vehicles | 20 |
| 5 | Congestion caused by other vehicles | Other vehicles | 18 |
| 6 | Congestion caused by other vehicles | Other vehicles | 20 |
| 7 | Congestion caused by obstacles | Obstructions | 13 |
| 8 | Congestion caused by obstacles | Obstructions | 14 |
| 9 | Congestion caused by pedestrians | Pedestrians | 15 |
| 10 | Congestion caused by pedestrians | Pedestrians | 16 |
| No. | Incidents | Type | Delay Time (min) |
|---|---|---|---|
| 1 | Noise from the workplace | Noise | 4 |
| 2 | Drizzle | Bad weather | 10 |
| 3 | Heavy rain | Bad weather | 18 |
| 4 | Gale | Bad weather | 20 |
| 5 | Noise from the workplace | Noise | 7 |
| 6 | Heavy rain | Bad weather | 15 |
| 7 | frigid weather | Bad weather | 13 |
| 8 | Noise from the workplace | Noise | 5 |
| 9 | Hot weather | Bad weather | 13 |
| 10 | Gale | Bad weather | 16 |
| Risk Criteria | Input | Output | Average Time (min) |
|---|---|---|---|
| Vehicle (C) | Maintenance | Vehicle needs replacement parts and maintenance | 30 |
| Oil leakage | Damage to the vehicle’s oil pipes or oil cylinders and other equipment, resulting in oil leakage from the vehicle | 30 | |
| Tank | The water temperature of the vehicle’s water tank is excessively high, or the water pump is abnormal | 30 | |
| Steering arm | The vehicle’s steering appears abnormal or its rocker arm breaks | 30 | |
| Tire | One or more of the tires on the vehicle are flat or runaway | 30 | |
| Network | There is no signal in the car network | 30 | |
| Road Environment (R) | Other vehicles | Other vehicles on the road impact scheduling | 15 |
| Obstructions | Space in the shipyard is limited and many blocks are placed on the roadside, which affects driving behavior | 15 | |
| Pedestrians | Congestion caused by pedestrians | 15 | |
| Working Environment (W) | Noise | There are various workshops in the shipyard, which generate significant noise and can affect drivers and pilots | 5 |
| Bad weather | This mainly refers to the impact of unfavorable weather, such as wind and rain, on traffic and staff | 15 | |
| Human (H) | Human behavior | There are many uncertainties in human behavior that can affect driving | 15 |
| Risk Criteria | Factors | Number | Delay Ratio (Proportion of Delays Caused by the Factor) | |
|---|---|---|---|---|
| Vehicle (C) | Maintenance | 48 | 7.31% | 24.66% |
| Oil leakage | 22 | 3.35% | ||
| Tank | 6 | 0.91% | ||
| Steering arm | 43 | 6.54% | ||
| Tire | 32 | 4.87% | ||
| Network | 11 | 1.67% | ||
| Road Environment (R) | Other vehicles | 58 | 8.83% | 24.20% |
| Obstructions | 20 | 3.04% | ||
| Pedestrians | 81 | 12.33% | ||
| Working Environment (W) | Noise | 101 | 15.37% | 25.11% |
| Bad weather | 64 | 9.74% | ||
| Humans (H) | Human behavior | 171 | 26.03% | 26.03% |
| Frequency | = 0 | = 3 | = 15 |
| Probability | = 0 | = 0.0208 | = 0.0521 |
| Frequency | = 18 | = 12 | — |
| Probability | = 0.0625 | = 0.0417 | — |
| Frequency | = 21 | = 27 | = 18 |
| Probability | = 0.0729 | = 0.0938 | = 0.0625 |
| Frequency | = 9 | = 15 | = 24 |
| Probability | = 0.0313 | = 0.0521 | = 0.0833 |
| Frequency | = 21 | = 36 | = 24 |
| Probability | = 0.0729 | = 0.125 | = 0.0833 |
| Frequency | = 30 | = 12 | — |
| Probability | = 0.1042 | = 0.0417 | — |
| Type | Pc=0 | Pc=1 | Pr=0 | Pr=1 | Pw=0 | Pw=1 | Ph=0 | Ph=1 |
| Probability | 0.4272 | 0.5729 | 0.4479 | 0.5522 | 0.4271 | 0.573 | 0.4063 | 0.5938 |
| Type | Pc=0,r=0 | Pc=0,r=1 | Pc=1,r=0 | Pc=1,r=1 | Pr=0,w=0 | Pr=1,w=0 | Pr=0,w=1 | Pr=1,w=1 |
| Probability | 0.1875 | 0.2397 | 0.2604 | 0.3125 | 0.125 | 0.3021 | 0.3229 | 0.2501 |
| Type | Pr=0,h=0 | Pr=1,h=0 | Pr=0,h=1 | Pr=1,h=1 | Pw=0,h=0 | Pw=1,h=0 | Pw=0,h=1 | Pw=1,h=1 |
| Probability | 0.1771 | 0.2292 | 0.2708 | 0.323 | 0.1458 | 0.2605 | 0.2813 | 0.3125 |
| Type | Pc=1,h=0 | Pc=1,h=1 | Pc=0,h=1 | Pc=0,h=0 | Pc=1,w=0 | Pc=1,w=1 | Pc=0,w=0 | Pc=0,w=1 |
| Probability | 0.2604 | 0.3125 | 0.2813 | 0.1459 | 0.2812 | 0.2917 | 0.1459 | 0.2813 |
| Type | Pc=0,r=0,w=0 | Pc=1,r=0,w=0 | Pc=0,r=1,w=0 | Pc=0,r=0,w=1 | Pc=1,r=1,w=0 | Pc=1,r=0,w=1 | Pc=0,r=1,w=1 |
| Probability | 0.0417 | 0.0833 | 0.1042 | 0.1458 | 0.1979 | 0.1771 | 0.1355 |
| Type | Pc=1,r=1,w=1 | Pr=0,w=0,h=0 | Pr=1,w=0,h=0 | Pr=0,w=1,h=0 | Pr=0,w=0,h=1 | Pc=0,r=0,h=0 | Pc=1,r=0,h=0 |
| Probability | 0.1146 | 0.0208 | 0.125 | 0.1563 | 0.1042 | 0.0625 | 0.1146 |
| Type | Pc=0,r=1,h=0 | Pc=0,r=0,h=1 | Pc=1,r=1,h=0 | Pc=1,r=0,h=1 | Pc=0,r=1,h=1 | Pc=1,r=1,h=1 | Pc=0,w=0,h=0 |
| Probability | 0.0834 | 0.125 | 0.1458 | 0.1458 | 0.1563 | 0.1667 | 0.0521 |
| Type | Pc=1,w=0,h=0 | Pc=0,w=1,h=0 | Pc=0,w=0,h=1 | Pc=1,w=1,h=0 | Pc=1,w=0,h=1 | Pc=0,w=1,h=1 | Pc=1,w=1,h=1 |
| Probability | 0.0937 | 0.0938 | 0.0938 | 0.1667 | 0.1875 | 0.1875 | 0.125 |
| Type | Pr=1,w=1,h=0 | Pr=1,w=0,h=1 | Pr=0,w=1,h=1 | Pr=1,w=1,h=1 | |||
| Probability | 0.1042 | 0.1771 | 0.1666 | 0.1459 |
| Type | Pc=0,r=0,w=0,h=0 | Pc=1,r=0,w=0,h=0 | Pc=0,r=1,w=0,h=0 | Pc=0,r=0,w=1,h=0 | Pc=0,r=0,w=0,h=1 |
| Probability | 0 | 0.0208 | 0.0521 | 0.0625 | 0.0417 |
| Type | Pc=1,r=1,w=0,h=0 | Pc=0,r=1,w=1,h=0 | Pc=0,r=1,w=0,h=1 | Pc=0,r=0,w=1,h=1 | Pc=1,r=1,w=1,h=0 |
| Probability | 0.0729 | 0.0313 | 0.0521 | 0.0833 | 0.0729 |
| Type | Pc=1,r=1,w=0,h=1 | Pc=1,r=0,w=1,h=1 | Pc=1,r=0,w=1,h=0 | Pc=1,r=0,w=0,h=1 | Pc=0,r=1,w=1,h=1 |
| Probability | 0.125 | 0.0833 | 0.0938 | 0.0625 | 0.1042 |
| Type | Pc=1,r=1,w=1,h=1 | ||||
| Probability | 0.0417 |
| Combination Type | C(C, R) | C(C, W) | C(C, H) | C(R, W) | C(R, H) | C(W, H) |
| C(x) | 0.003955 | 0.001613 | 0.009267 | 0.053291 | 0.000142 | 0.014472 |
| H(x) | 0.4389 | 0.4329 | 0.4309 | 0.4315 | 0.4353 | 0.4309 |
| Sum | 0.2214 | 0.2173 | 0.2201 | 0.2424 | 0.2177 | 0.2227 |
| Combination Type | C(C, R, W) | C(C, R, H) | C(C, W, H) | C(R, W, H) | C(C, R, W, H) | |
| C(x) | 0.072486 | 0.00968 | 0.036161 | 0.083253 | 0.153196 | |
| H(x) | 0.5274 | 0.5686 | 0.548 | 0.5609 | 0.6192 | |
| Sum | 0.2999 | 0.2891 | 0.2921 | 0.3221 | 0.3862 | |
| Combination Type | T (C, R) | T (C, W) | T (C, H) | T (R, W) | T (R, H) | T (W, H) |
| Delay_Time_1 | 45 | 47 | 55 | 32 | 36 | 33 |
| Delay_Time_2 | 47 | 52 | 45 | 38 | 34 | 35 |
| Delay_Time_3 | 51 | 53 | 55 | 32 | 33 | 32 |
| Delay_Time_4 | 55 | 54 | 50 | 35 | 34 | 38 |
| Delay_Time_5 | 52 | 49 | 50 | 36 | 33 | 38 |
| Delay Time_6 | 50 | 46 | 50 | 37 | 35 | 32 |
| Delay_Time_7 | 48 | 47 | 55 | 35 | 34 | 38 |
| Delay_Time_8 | 47 | 55 | 47 | 32 | 35 | 36 |
| Delay_Time_9 | 50 | 52 | 45 | 36 | 36 | 36 |
| Delay_Time_10 | 55 | 48 | 50 | 38 | 37 | 32 |
| Delay_Time_11 | 52 | 48 | 51 | 33 | 38 | 36 |
| Delay_Time_12 | 48 | 49 | 47 | 36 | 35 | 34 |
| Combination Type | T (C, R, W) | T (C, R, H) | T (C, W, H) | T (R, W, H) | T (C, R, W, H) | |
| Delay_Time_1 | 60 | 58 | 69 | 49 | 103 | |
| Delay_Time_2 | 68 | 70 | 65 | 50 | 99 | |
| Delay_Time_3 | 74 | 56 | 60 | 52 | 84 | |
| Delay_Time_4 | 67 | 59 | 70 | 58 | 87 | |
| Delay_Time_5 | 58 | 61 | 75 | 65 | 103 | |
| Delay Time_6 | 70 | 59 | 75 | 73 | 77 | |
| Delay_Time_7 | 59 | 70 | 67 | 57 | 83 | |
| Delay_Time_8 | 64 | 63 | 66 | 71 | 79 | |
| Delay_Time_9 | 71 | 75 | 57 | 73 | 100 | |
| Delay_Time_10 | 64 | 70 | 61 | 57 | 75 | |
| Delay_Time_11 | 68 | 72 | 57 | 46 | 102 | |
| Delay_Time_12 | 57 | 67 | 58 | 69 | 88 | |
| Value | 0.7404 | 0.7657 | 0.7185 | 0.7576 | 0.7912 | 0.7489 | 0.7326 | 0.7324 | 0.8089 | 0.7156 |
| Combination Type | T (C, R) | T (C, W) | T (C, H) | T (R, W) | T (R, H) | T (W, H) |
| Delays | 48.63 | 48.42 | 48.56 | 34.78 | 33.91 | 34.09 |
| Combination Type | T (C, R, W) | T (C, R, H) | T (C, W, H) | T (R, W, H) | T(C, R, W, H) | |
| Delays | 68.32 | 67.62 | 67.81 | 53.66 | 90.99 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, N.; Yin, J.; Khan, R.U. Risk Coupling Assessment of Vehicle Scheduling for Shipyard in a Complicated Road Environment. J. Mar. Sci. Eng. 2024, 12, 685. https://doi.org/10.3390/jmse12040685
Wang N, Yin J, Khan RU. Risk Coupling Assessment of Vehicle Scheduling for Shipyard in a Complicated Road Environment. Journal of Marine Science and Engineering. 2024; 12(4):685. https://doi.org/10.3390/jmse12040685
Chicago/Turabian StyleWang, Ningfei, Jingbo Yin, and Rafi Ullah Khan. 2024. "Risk Coupling Assessment of Vehicle Scheduling for Shipyard in a Complicated Road Environment" Journal of Marine Science and Engineering 12, no. 4: 685. https://doi.org/10.3390/jmse12040685
APA StyleWang, N., Yin, J., & Khan, R. U. (2024). Risk Coupling Assessment of Vehicle Scheduling for Shipyard in a Complicated Road Environment. Journal of Marine Science and Engineering, 12(4), 685. https://doi.org/10.3390/jmse12040685