


A Network Model for Identifying Key Causal Factors of Ship Collision

Abstract
1. Introduction
2. Literature Review
3. Cascading Failure Theory
- (1)
- Initial load
- (2)
- Node capacity
4. Method
4.1. Ship Collision Causation Network Structure
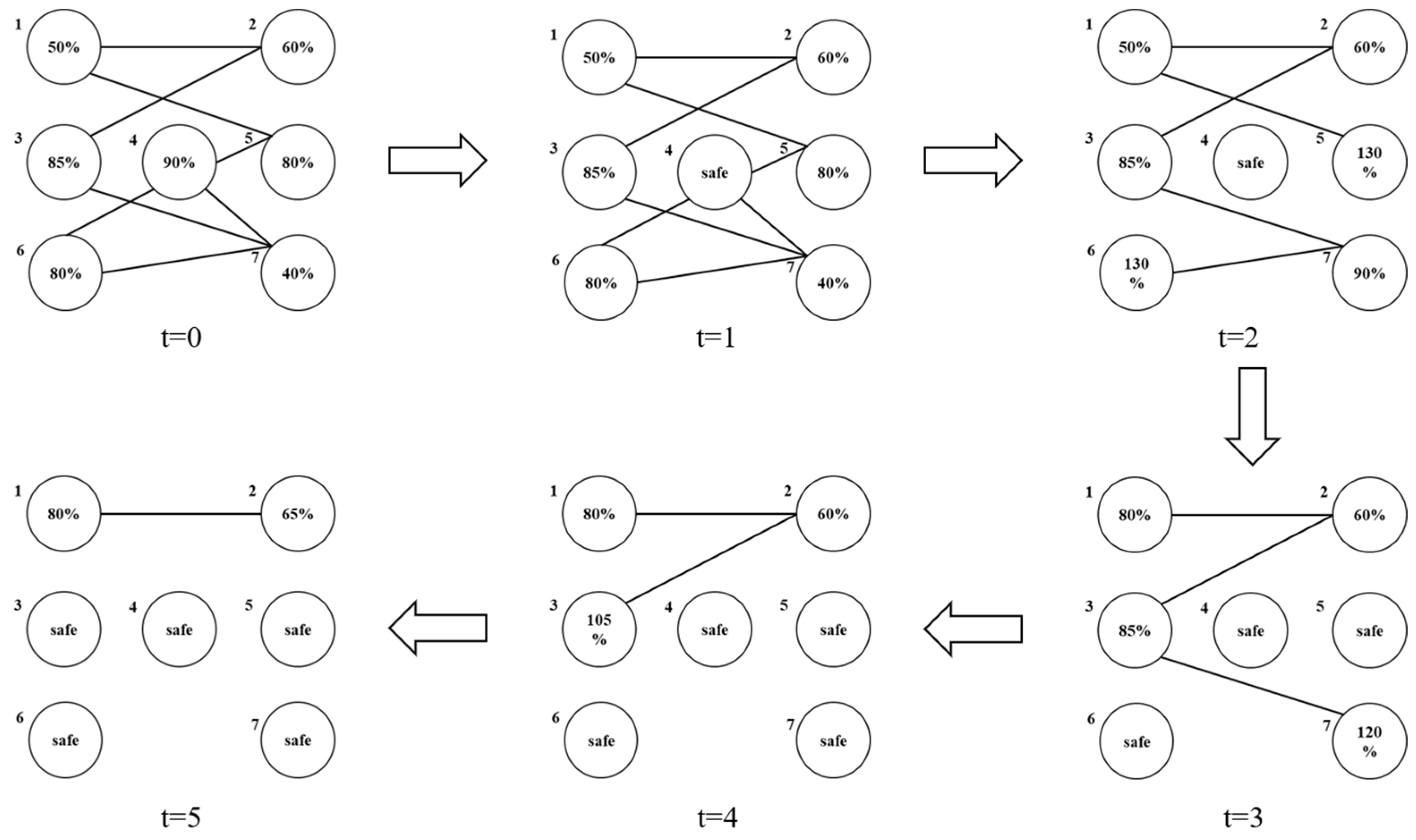
4.2. Successive Security Evolutionary Processes
4.3. Network Efficiency
5. Numerical Case Study
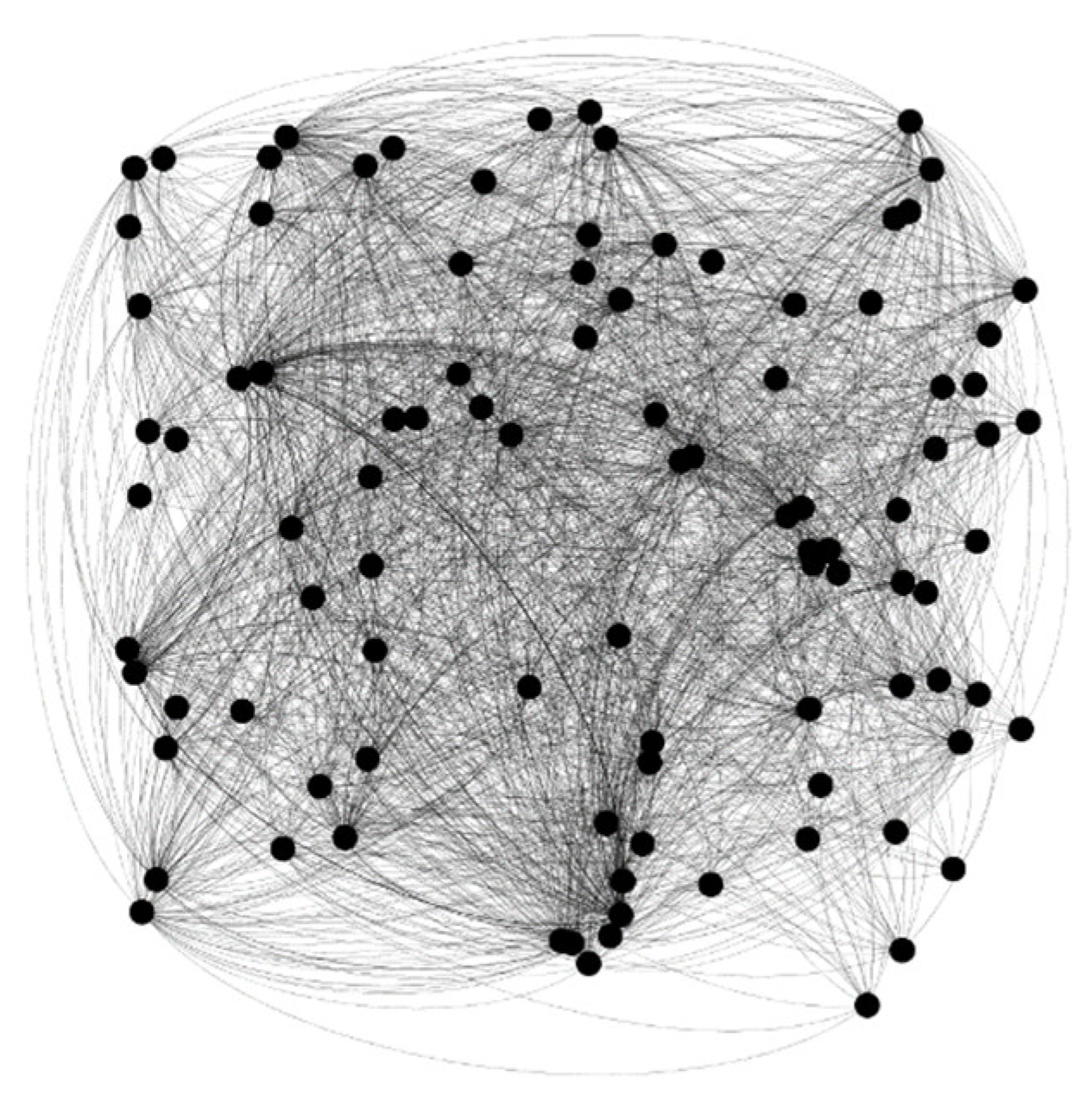
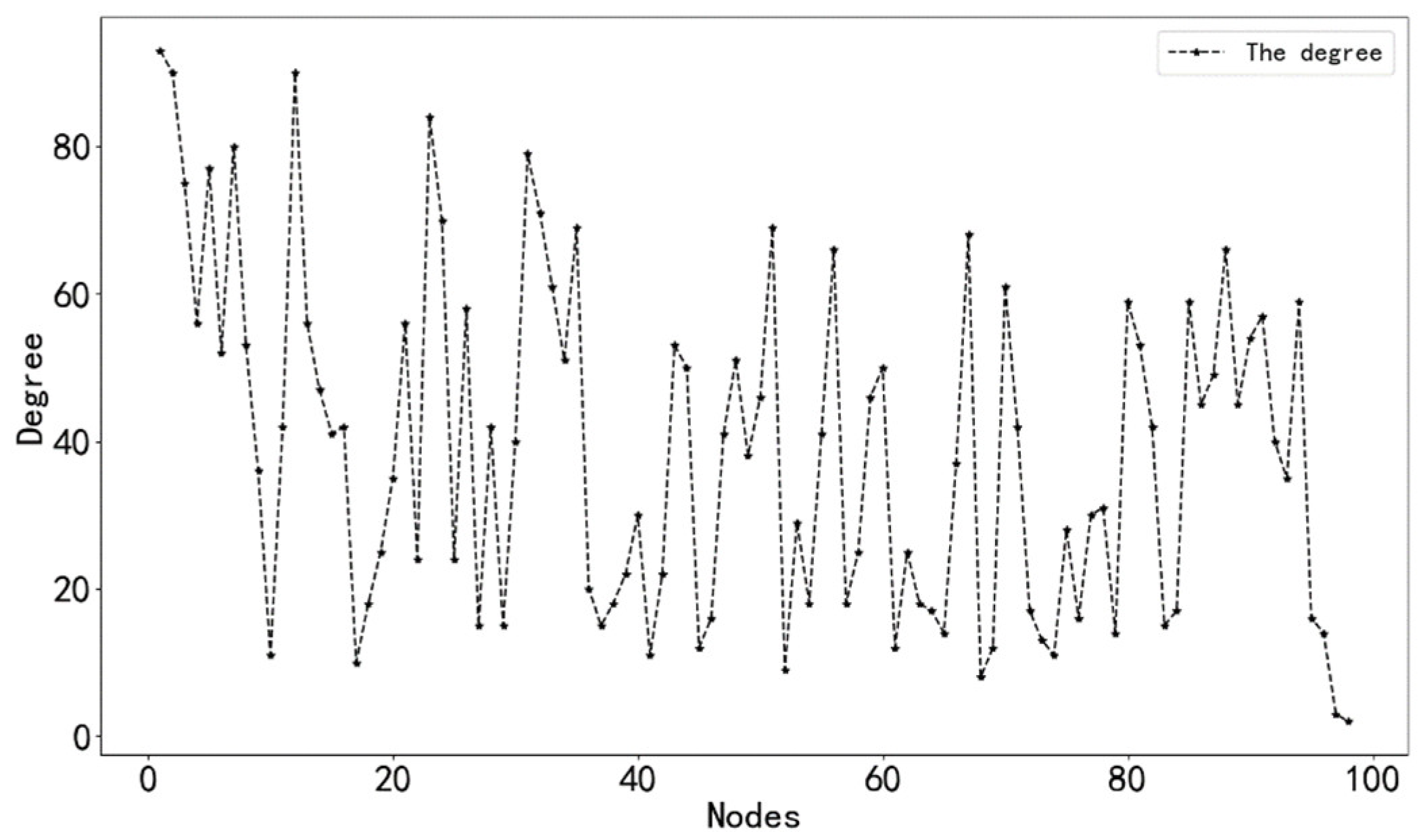
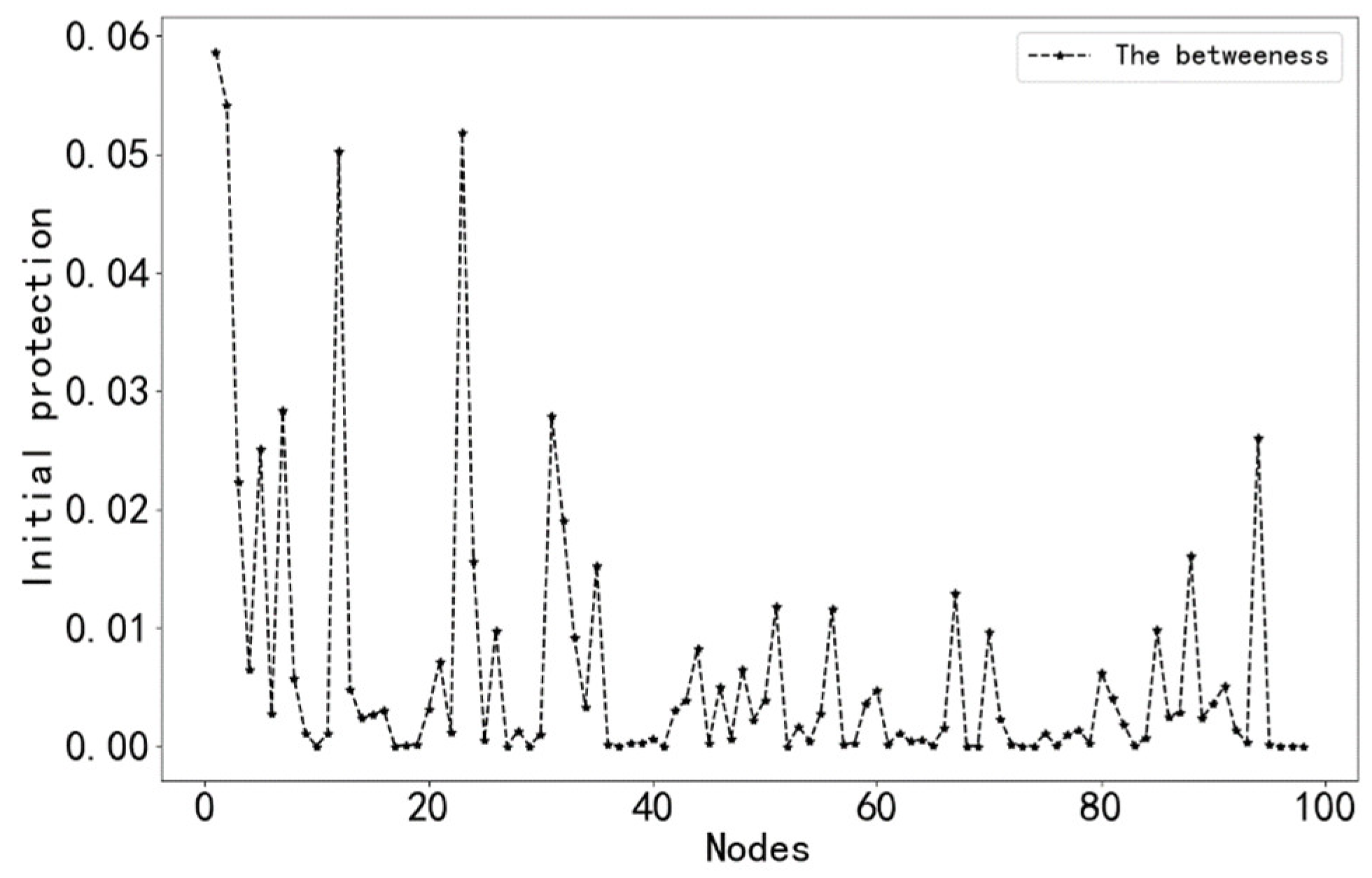
5.1. Constructing a Causal Network for Ship Collisions
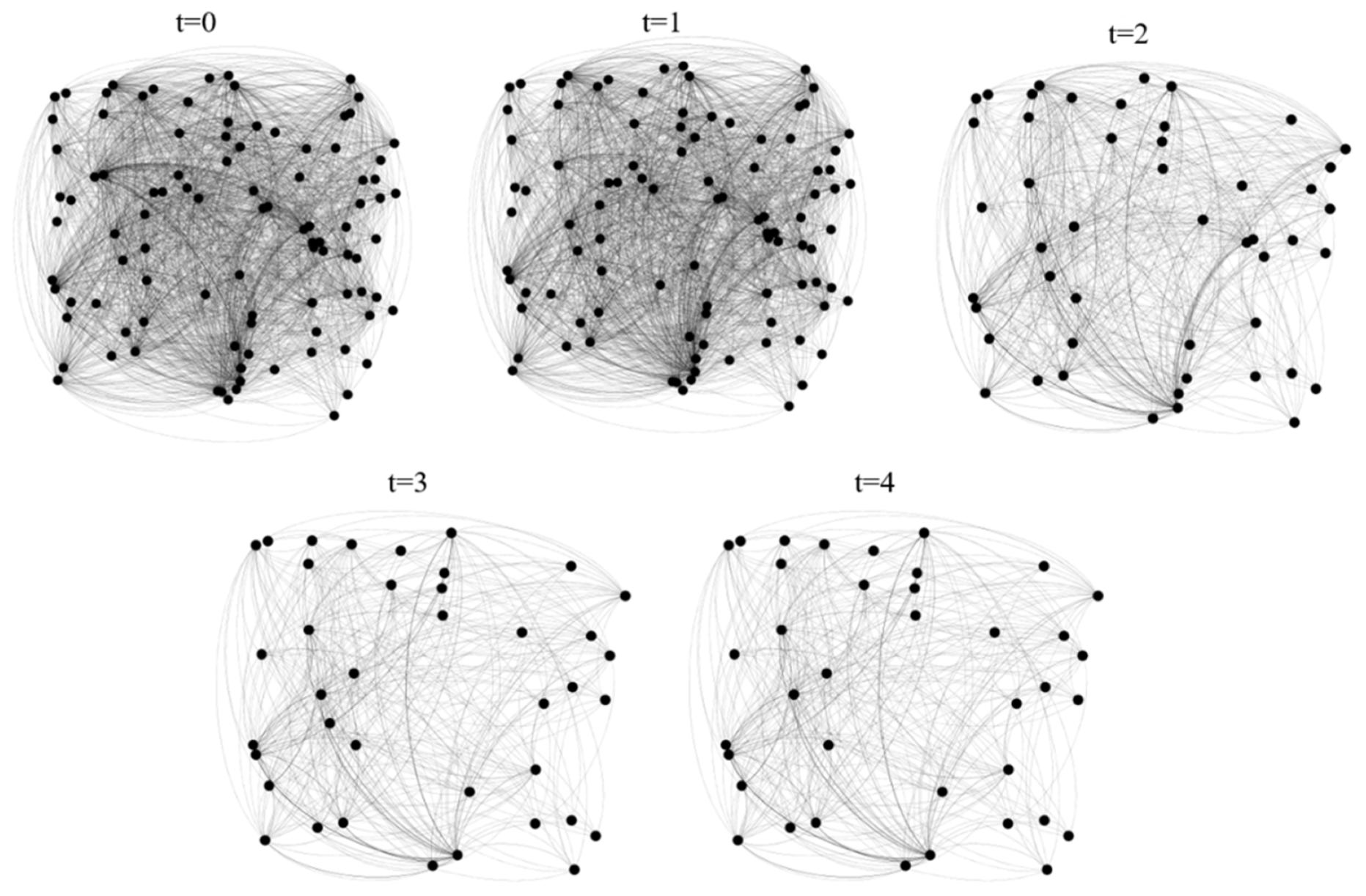
5.2. Successive Safety-Triggering Processes
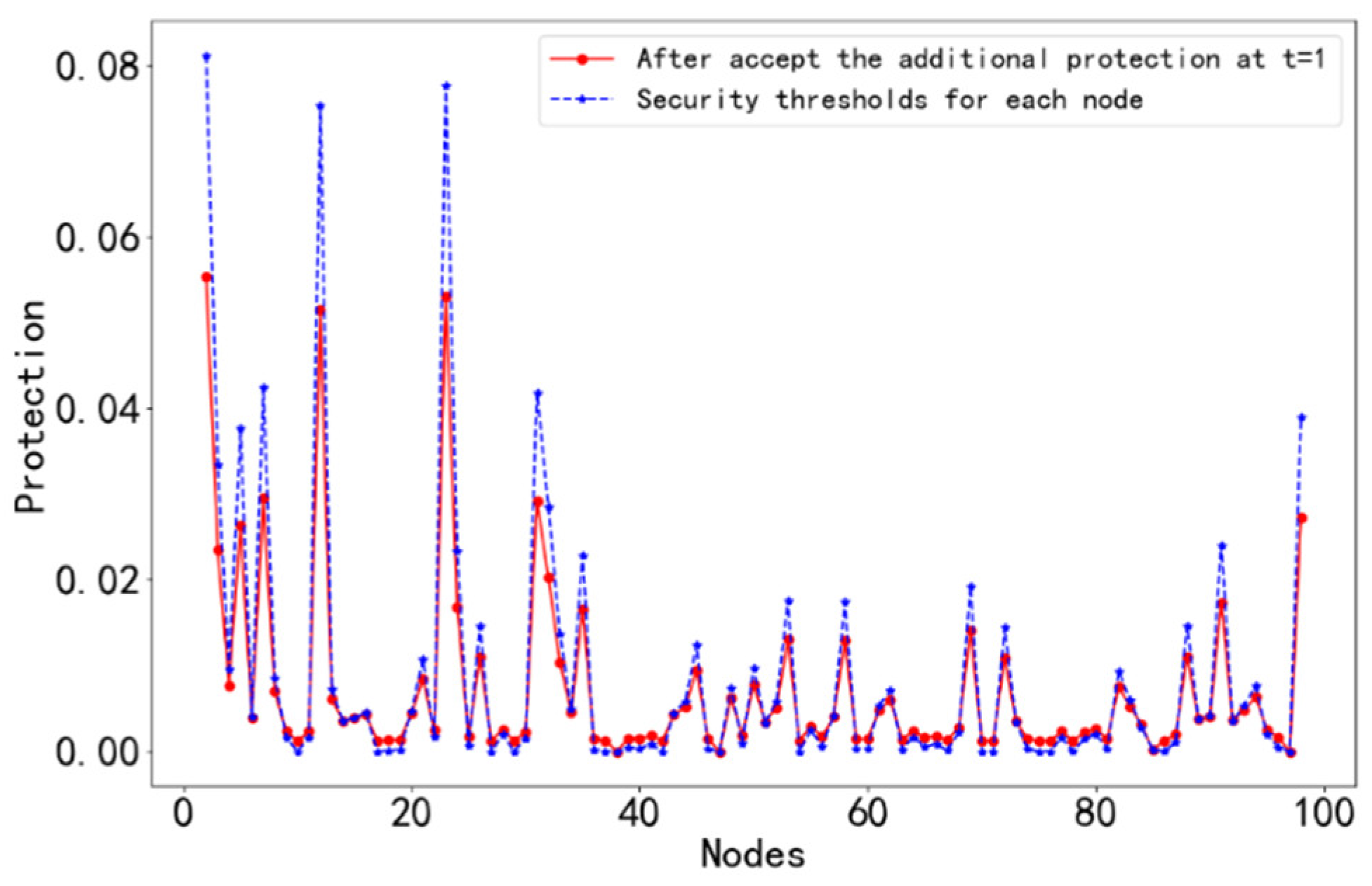
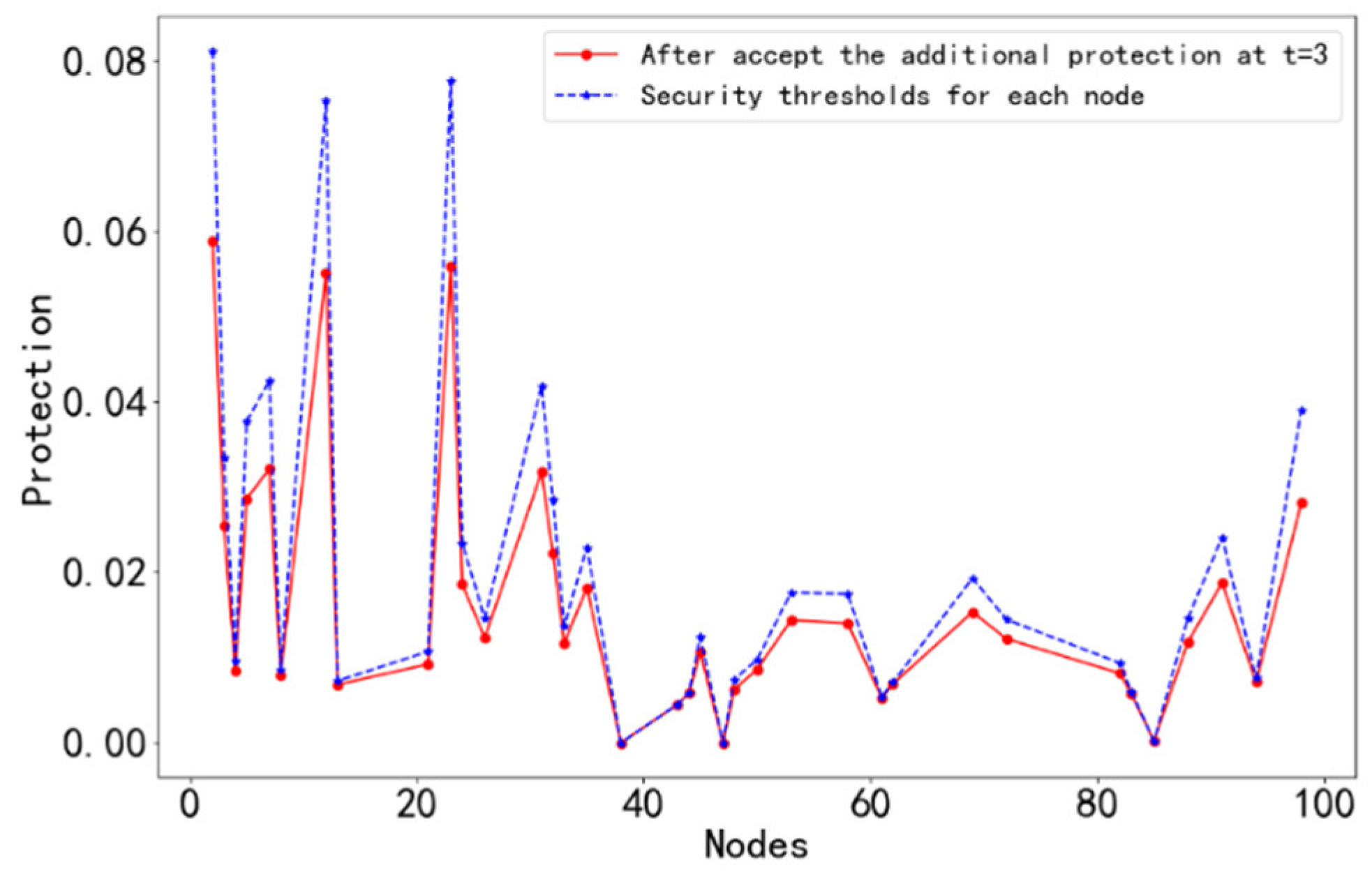
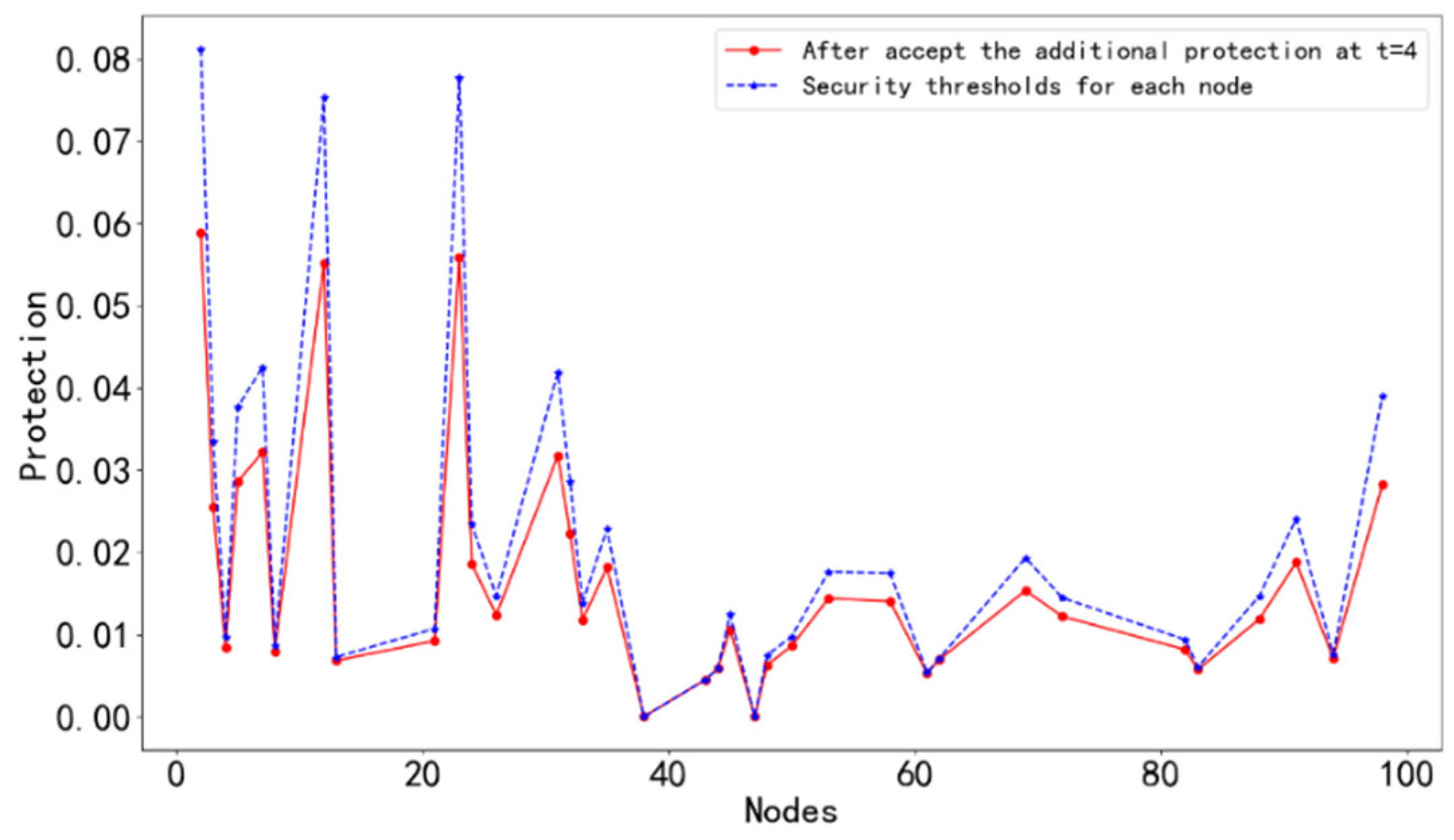
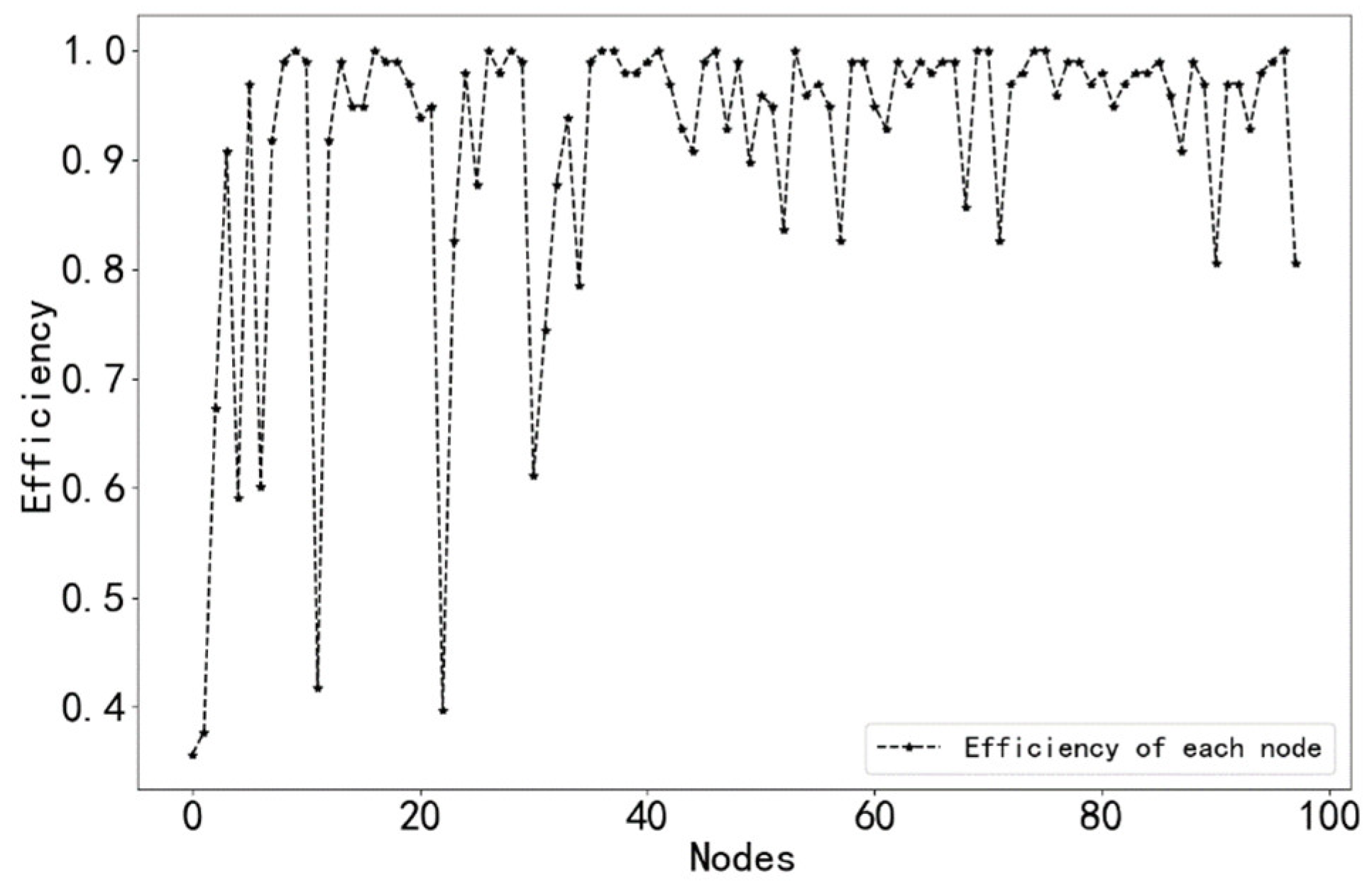
5.3. The Successive Safety Evolution Process of Each Node
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cause ID | Cause Name |
|---|---|
| 1 | Improper lookout |
| 2 | Inappropriate assessment of the situation of the risk of collision |
| 3 | Did not make a sound signal as per guidelines |
| 4 | Did not exhibit lights and shapes as per guidelines |
| 5 | Did not navigate at a safe speed |
| 6 | Did not take actions such as slacking a vessel’s speed, stopping or reversing her propulsion in ample time to avoid close quarters |
| 7 | Did not take actions such as slacking a vessel’s speed, stopping or reversing her propulsion in ample time to avoid close quarters |
| 8 | The person on duty was not on the bridge |
| 9 | VHF was not on duty |
| 10 | Misunderstood the information from the VHF |
| 11 | Took action blindly |
| 12 | Did not take effective action in good time to avoid collision (miss the best time to take effective action) |
| 13 | The give-way vessel did not carry out the duty to keep out of the way |
| 14 | The stand-on vessel took action in error |
| 15 | The stand-on vessel took action in error |
| 16 | Deviation from specified course |
| 17 | Violation of the regulation of no-drinking when on duty |
| 18 | Dozed off on duty |
| 19 | The person on duty was engaged in something irrelevant to navigation |
| 20 | Did not keep a safe distance from the anchoring ship |
| 21 | Did not obtain sufficient information about the surrounding navigation environment |
| 22 | Did not monitor own ship’s position sufficiently |
| 23 | Did not meet the requirements of good seamanship and seafarers’ usual practice |
| 24 | Inadequate use of radar/ARPA |
| 25 | Identified the information of radar target in error |
| 26 | Inadequate use of AIS (including not installing or turning on AIS) |
| 27 | The captain did not give any orders for night navigation |
| 28 | The captain failed to command regarding the situation of the bridge as required (e.g., foggy weather, narrow water channel, and traffic-dense area) |
| 29 | The navigation alarm on the bridge was not on |
| 30 | The steering device was not used at the proper time |
| 31 | Did not see other ships as early as possible |
| 32 | Failure to track or misjudge the dynamics of other ships |
| 33 | Did not take coordinated turning actions in an urgent situation |
| 34 | Took improper emergency measures to avoid collision |
| 35 | Did not take the most helpful actions to avoid collision in an emergency risk |
| 36 | Overtook blindly without other ships’ approval |
| 37 | Communication failure between the officer on duty and the sailor on duty |
| 38 | Communication error between the bridge control and the engine room |
| 39 | The officer is not familiar with the rules of the COLREGs |
| 40 | The officers’ shift error |
| 41 | The inexperience of the person on duty |
| 42 | The person is sitting when he is on duty |
| 43 | The officer is not familiar with the maneuverability of the ship |
| 44 | Small alterations in course to avoid collision |
| 45 | Underestimated the impact of wind, wave, and current |
| 46 | No tug assistance was applied when berthing or unberthing (no application of tug assisting when berthing and unberthing) |
| 47 | Operated the tug improperly when berthing and unberthing |
| 48 | The remaining speed was too fast when berthing and unberthing |
| 49 | Did not check the effectiveness of the action to avoid collision |
| 50 | Violation of navigation regulations of the water area (including regulations on ship routing system) |
| 51 | Not following VTS advice or traffic control |
| 52 | Failure to comply with narrow channel navigation rules |
| 53 | The incompetence of the crew member |
| 54 | The officer’s overfatigue |
| 55 | Pilot operation error |
| 56 | The officer left the ship too early |
| 57 | Failure to obey report obligation |
| 58 | Insufficient crew number |
| 59 | Machine failure without repair guarantee |
| 60 | Ships sailing beyond the approved navigation area |
| 61 | Anchoring in waterway, customary route, or dense-traffic area |
| 62 | Violation of mooring duty requirements |
| 63 | Improper anchoring method |
| 64 | No effective monitoring of anchorage position during anchoring |
| 65 | No effective measures were taken after anchor dragging |
| 66 | Significantly affected by the wind |
| 67 | Significantly affected by the wave |
| 68 | Significantly affected by the current |
| 69 | Poor visibility |
| 70 | The effect of navigational obstructions |
| 71 | The effect of the bend of the channel |
| 72 | Navigation impact in traffic-dense areas (complicated navigation environment) |
| 73 | The impact of collision avoidance by third-party vessels |
| 74 | The impact of narrow waterways |
| 75 | The impact of shallow water |
| 76 | The VHF communication channel was too noisy |
| 77 | The main engine broke down |
| 78 | Failure of the steering gear |
| 79 | AIS fault |
| 80 | Other facilities’ failure |
| 81 | The influence of the blind area of the bow |
| 82 | The ship was not in a seaworthy condition |
| 83 | The Vessel certificate expired or undocumented |
| 84 | No ship inspection was conducted as required |
| 85 | The ship failed to correct safety defects or faults before sailing |
| 86 | No VTS was established |
| 87 | VTS supervision error |
| 88 | The shipping company failed to fulfill the main responsibility of safety production |
| 89 | The shipping company commanded the ship to operate on sea illegally |
| 90 | The shipping company did not provide enough qualified crew for the ship |
| 91 | The shipping company did not establish SMS or the requirements of SMS were not implemented |
| 92 | The training and assessment of the crew members by the shipping company were insufficient |
| 93 | (Improper arrangement of persons on duty) insufficient staff on duty |
| 94 | No additional lookout staff |
| 95 | The shipowner did not sufficiently know about the information and competency of the crewmembers |
| 96 | The shipping company did not monitor the ship dynamically |
| 97 | The shipping company did not fully grasp the navigation management regulations important to ship safety |
| 98 | Defects in bridge resource management |
References
- Chen, J.; Bian, W.; Wan, Z.; Yang, Z.; Zheng, H.; Wang, P. Identifying factors influencing total-loss marine accidents in the world: Analysis and evaluation based on ship types and sea regions. Ocean Eng. 2019, 191, 106495. [Google Scholar] [CrossRef]
- Wang, Y.-F.; Wang, L.-T.; Jiang, J.-C.; Wang, J.; Yang, Z.-L. Modelling ship collision risk based on the statistical analysis of historical data: A case study in Hong Kong waters. Ocean Eng. 2020, 197, 106869. [Google Scholar] [CrossRef]
- Roca, E.; Julià-Verdaguer, A.; Villares, M.; Rosas-Casals, M. Applying network analysis to assess coastal risk planning. Ocean Coast. Manag. 2018, 162, 127–136. [Google Scholar] [CrossRef]
- Provan, D.J.; Woods, D.D.; Dekker, S.W.A.; Rae, A.J. Safety II professionals: How resilience engineering can transform safety practice. Reliab. Eng. Syst. Saf. 2020, 195, 106740. [Google Scholar] [CrossRef]
- Zhang, D.; Yang, X.; Fan, X. Research on Risk Assessment of Vessel-Bridge Collision Accident In Inland Waterway. Appl. Mech. Mater. 2013, 256, 2790–2793. [Google Scholar] [CrossRef]
- Ugurlu, H.; Cicek, I. Analysis and assessment of ship collision accidents using Fault Tree and Multiple Correspondence Analysis. Ocean Eng. 2022, 245, 110514. [Google Scholar] [CrossRef]
- Afenyo, M.; Khan, F.; Veitch, B.; Yang, M. Arctic shipping accident scenario analysis using Bayesian Network approach. Ocean Eng. 2017, 133, 224–230. [Google Scholar] [CrossRef]
- Chai, T.; Zhu, H.; Peng, L.; Wang, J.; Fan, Z.; Xiao, S.; Xie, J.; Hu, Y. Constructing and analyzing the causation chain network for ship collision accidents. Int. J. Mod. Phys. C 2022, 33, 2250118. [Google Scholar] [CrossRef]
- Zhen, R.; Shi, Z.; Liu, J.; Shao, Z. A novel arena-based regional collision risk assessment method of multi-ship encounter situation in complex waters. Ocean Eng. 2022, 246, 110531. [Google Scholar] [CrossRef]
- Wu, B.; Yip, T.L.; Yan, X.; Guedes Soares, C. Fuzzy logic based approach for ship-bridge collision alert system. Ocean Eng. 2019, 187, 106152. [Google Scholar] [CrossRef]
- Huang, Y.; van Gelder, P. Time-Varying Risk Measurement for Ship Collision Prevention. Risk Anal. 2020, 40, 24–42. [Google Scholar] [CrossRef]
- Chen, P.; Li, M.; Mou, J. A Velocity Obstacle-Based Real-Time Regional Ship Collision Risk Analysis Method. J. Mar. Sci. Eng. 2021, 9, 428. [Google Scholar] [CrossRef]
- Li, K.; Pan, Y. An effective method for identifying the key factors of railway accidents based on the network model. Int. J. Mod. Phys. B 2020, 34, 2050192. [Google Scholar] [CrossRef]
- Li, M.; Wang, H.; Wang, H. Resilience Assessment and Optimization for Urban Rail Transit Networks: A Case Study of Beijing Subway Network. IEEE Access 2019, 7, 71221–71234. [Google Scholar] [CrossRef]
- Guo, S.; Zhou, X.; Tang, B.; Gong, P. Exploring the behavioral risk chains of accidents using complex network theory in the construction industry. Phys. A Stat. Mech. Its Appl. 2020, 560, 125012. [Google Scholar] [CrossRef]
- Zhou, C.; Ding, L.; Skibniewski, M.J.; Luo, H.; Jiang, S. Characterizing time series of near-miss accidents in metro construction via complex network theory. Saf. Sci. 2017, 98, 145–158. [Google Scholar] [CrossRef]
- Deng, X.; Wang, S.; Wang, W.; Yu, P.; Xiong, X. Optimal defense strategy for AC/DC hybrid power grid cascading failures based on game theory and deep reinforcement learning. Front. Energy Res. 2023, 11, 247. [Google Scholar] [CrossRef]
- Guo, H.; Yu, S.S.; Iu, H.H.C.; Fernando, T.; Zheng, C. A complex network theory analytical approach to power system cascading failure-From a cyber-physical perspective. Chaos 2019, 29, 053111. [Google Scholar] [CrossRef]
- He, Z.; Guo, J.-N.; Xu, J.-X. Cascade Failure Model in Multimodal Transport Network Risk Propagation. Math. Probl. Eng. 2019, 2019, 3615903. [Google Scholar] [CrossRef]
- Valente, T.W. Network interventions. Science 2012, 337, 49–53. [Google Scholar] [CrossRef]
- Ruths, J.; Ruths, D. Control profiles of complex networks. Science 2014, 343, 1373–1376. [Google Scholar] [CrossRef] [PubMed]
- Buldyrev, S.V.; Parshani, R.; Paul, G.; Stanley, H.E.; Havlin, S. Catastrophic cascade of failures in interdependent networks. Nature 2010, 464, 1025–1028. [Google Scholar] [CrossRef] [PubMed]
- Valdez, L.D.; Shekhtman, L.; La Rocca, C.E.; Zhang, X.; Buldyrev, S.V.; Trunfio, P.A.; Braunstein, L.A.; Havlin, S.; Estrada, E. Cascading failures in complex networks. J. Complex Netw. 2020, 8, cnaa013. [Google Scholar] [CrossRef]
- Kinney, R.; Crucitti, P.; Albert, R.; Latora, V. Modeling cascading failures in the North American power grid. Eur. Phys. J. B 2005, 46, 101–107. [Google Scholar] [CrossRef]
- Motter, A.E.; Lai, Y.C. Cascade-based attacks on complex networks. Phys. Rev. E Stat. Nonlin. Soft Matter Phys. 2002, 66, 065102. [Google Scholar] [CrossRef]











| Node Numbers in Fully Secured State | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 8 | 9 | 10 | 13 | 16 | 17 | 18 | 21 | 24 | 26 |
| 48 | 50 | 53 | 54 | 55 | 58 | 59 | 62 | 63 | 64 |
| 65 | 66 | 67 | 69 | 70 | 72 | 73 | 74 | 75 | 76 |
| 77 | 78 | 79 | 80 | 83 | 85 | 86 | 88 | 91 | 94 |
| 95 | |||||||||
| Node Numbers in Fully Secured State | ||||
|---|---|---|---|---|
| 5 | 14 | 15 | 19 | 33 |
| 51 | 56 | 89 | 92 | 96 |
| Time | t = 0 | t = 1 | t = 2 | t = 3 | t = 4 |
|---|---|---|---|---|---|
| N’ | 98 | 97 | 46 | 36 | 35 |
| E(1) | 1.0000 | 0.9899 | 0.4694 | 0.3673 | 0.3571 |
| ID | Network Efficiency | ID | Network Efficiency | ID | Network Efficiency | ID | Network Efficiency |
|---|---|---|---|---|---|---|---|
| 1 | 0.3571 | 26 | 0.8775 | 51 | 0.9591 | 76 | 1.0000 |
| 2 | 0.3775 | 27 | 1.0000 | 52 | 0.9489 | 77 | 0.9591 |
| 3 | 0.6734 | 28 | 0.9795 | 53 | 0.8367 | 78 | 0.9897 |
| 4 | 0.9081 | 29 | 1.0000 | 54 | 1.0000 | 79 | 0.9897 |
| 5 | 0.5918 | 30 | 0.9897 | 55 | 0.9591 | 80 | 0.9693 |
| 6 | 0.9693 | 31 | 0.6122 | 56 | 0.9693 | 81 | 0.9795 |
| 7 | 0.6020 | 32 | 0.7448 | 57 | 0.9489 | 82 | 0.9489 |
| 8 | 0.9183 | 33 | 0.8775 | 58 | 0.8265 | 83 | 0.9693 |
| 9 | 0.9897 | 34 | 0.9387 | 59 | 0.9897 | 84 | 0.9795 |
| 10 | 1.0000 | 35 | 0.7857 | 60 | 0.9897 | 85 | 0.9795 |
| 11 | 0.9897 | 36 | 0.9897 | 61 | 0.9489 | 86 | 0.9897 |
| 12 | 0.4183 | 37 | 1.0000 | 62 | 0.9285 | 87 | 0.9591 |
| 13 | 0.9183 | 38 | 1.0000 | 63 | 0.9897 | 88 | 0.9081 |
| 14 | 0.9897 | 39 | 0.9795 | 64 | 0.9693 | 89 | 0.9897 |
| 15 | 0.9489 | 40 | 0.9795 | 65 | 0.9897 | 90 | 0.9693 |
| 16 | 0.9489 | 41 | 0.9897 | 66 | 0.9795 | 91 | 0.8061 |
| 17 | 1.0000 | 42 | 1.0000 | 67 | 0.9897 | 92 | 0.9693 |
| 18 | 0.9897 | 43 | 0.9693 | 68 | 0.9897 | 93 | 0.9693 |
| 19 | 0.9897 | 44 | 0.9285 | 69 | 0.8571 | 94 | 0.9285 |
| 20 | 0.9693 | 45 | 0.9081 | 70 | 1.0000 | 95 | 0.9795 |
| 21 | 0.9387 | 46 | 0.9897 | 71 | 1.0000 | 96 | 0.9897 |
| 22 | 0.9489 | 47 | 1.0000 | 72 | 0.8265 | 97 | 1.0000 |
| 23 | 0.3979 | 48 | 0.9285 | 73 | 0.9693 | 98 | 0.8061 |
| 24 | 0.8265 | 49 | 0.9897 | 74 | 0.9795 | ||
| 25 | 0.9795 | 50 | 0.8979 | 75 | 1.0000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Zhu, H.; Yang, C.; Chai, T. A Network Model for Identifying Key Causal Factors of Ship Collision. J. Mar. Sci. Eng. 2023, 11, 982. https://doi.org/10.3390/jmse11050982
Liu J, Zhu H, Yang C, Chai T. A Network Model for Identifying Key Causal Factors of Ship Collision. Journal of Marine Science and Engineering. 2023; 11(5):982. https://doi.org/10.3390/jmse11050982
Chicago/Turabian StyleLiu, Jianzhou, Huaiwei Zhu, Chaoxu Yang, and Tian Chai. 2023. "A Network Model for Identifying Key Causal Factors of Ship Collision" Journal of Marine Science and Engineering 11, no. 5: 982. https://doi.org/10.3390/jmse11050982
APA StyleLiu, J., Zhu, H., Yang, C., & Chai, T. (2023). A Network Model for Identifying Key Causal Factors of Ship Collision. Journal of Marine Science and Engineering, 11(5), 982. https://doi.org/10.3390/jmse11050982