
Hydrodynamic Analysis of a Novel Modular Floating Structure System Integrated with Floating Artificial Reefs and Wave Energy Converters


Abstract
:1. Introduction
2. Numerical Methods
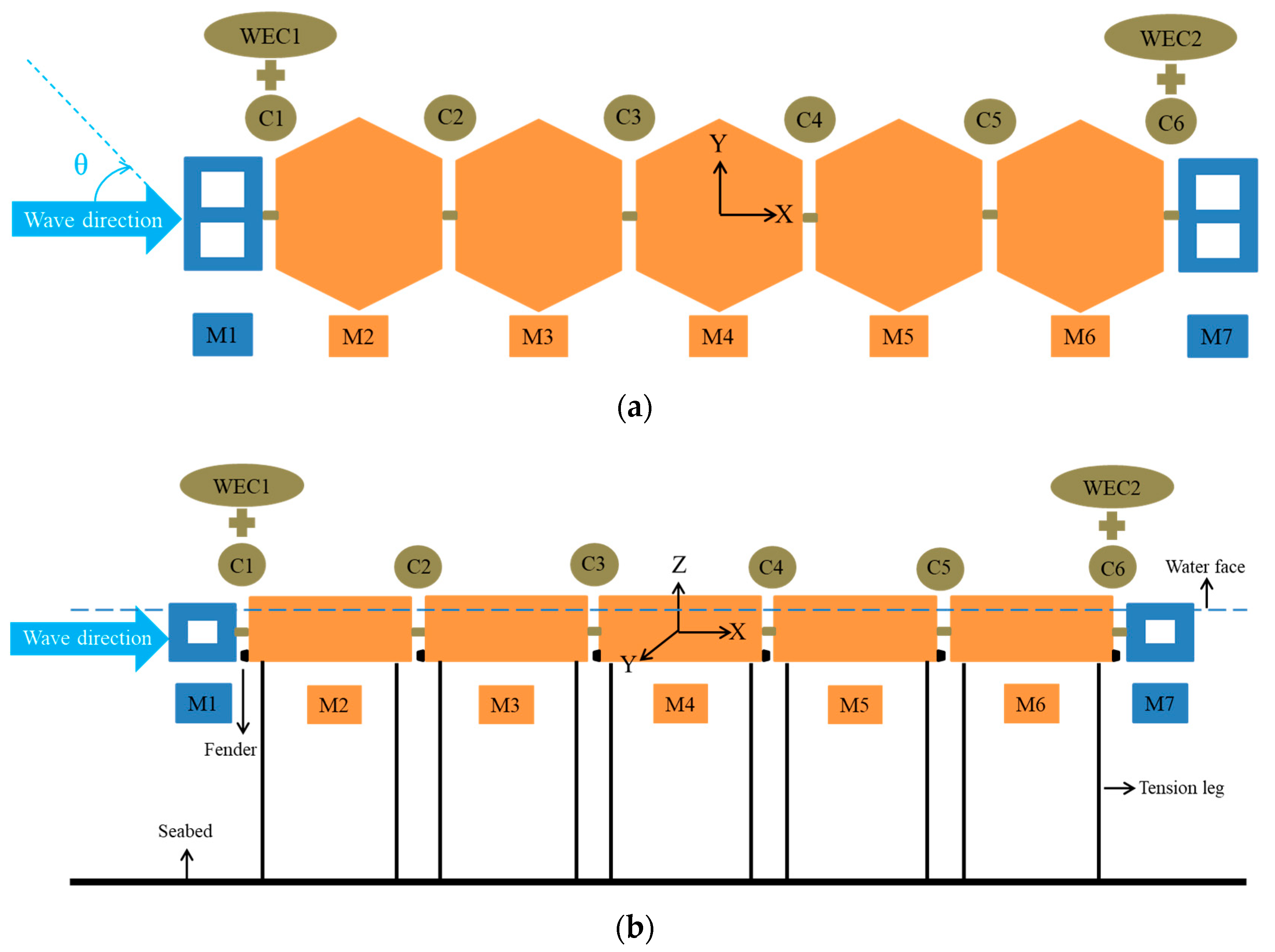
2.1. Conceptual Design of the MFS System
- (a)
- The fixed connector (marked as f) is applied to the C3 and the C4: there is no relative movement in any direction between two adjacent modules.
- (b)
- The hinge connector (marked as h) is applied to the C2 and the C5: there is only relative pitch between two adjacent modules.
- (c)
- The hinge connector with an additional linear rotational damper (marked as H, worked as a WEC’s PTO) is applied to the C1 and the C6: There is only relative pitch between two adjacent modules, and the pitch velocity can be adjusted by the damper.
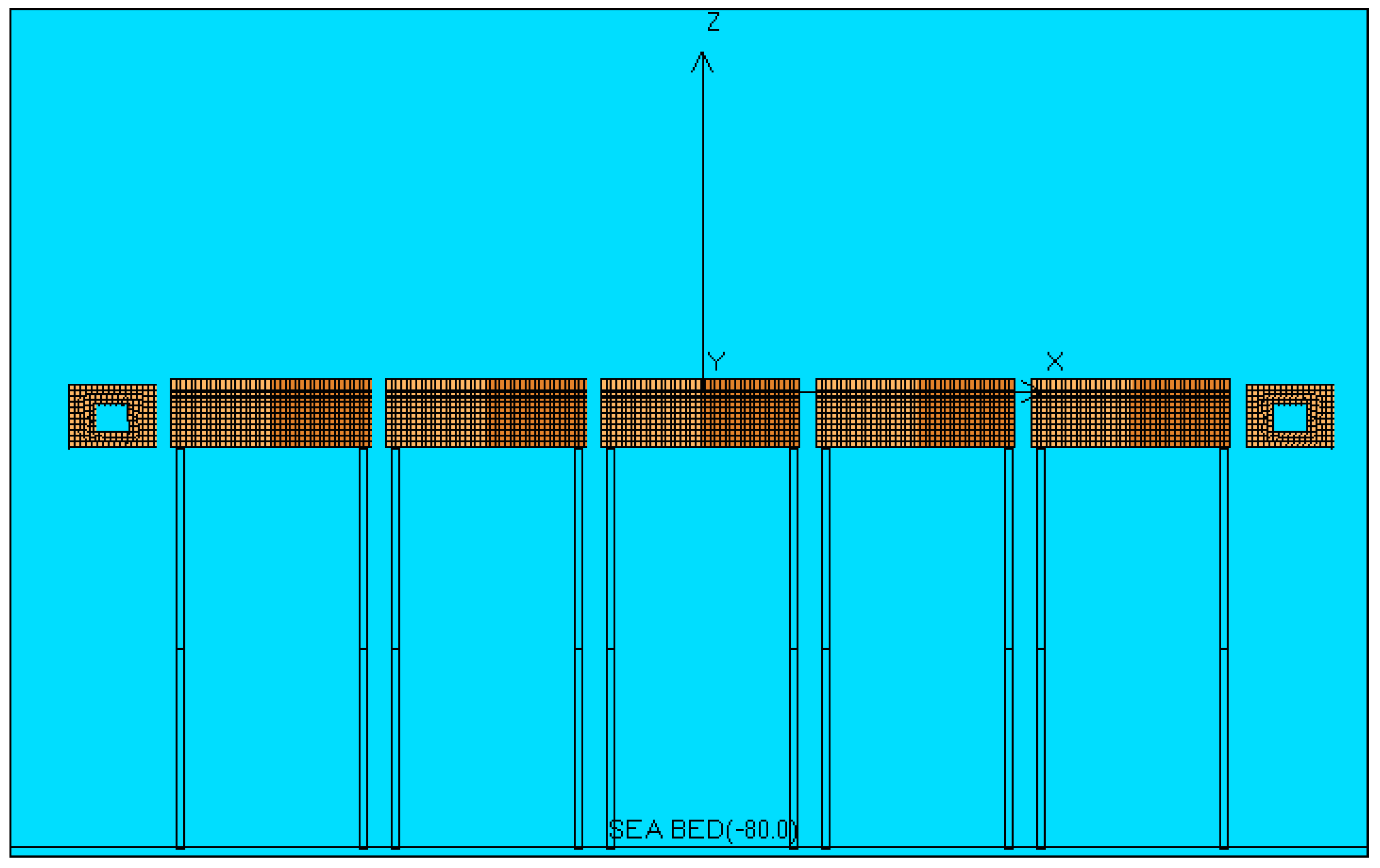
2.2. Hydrodynamic Model
2.3. Theoretical Basis
2.4. Estimation of the Wave Energy Output
3. Numerical Results
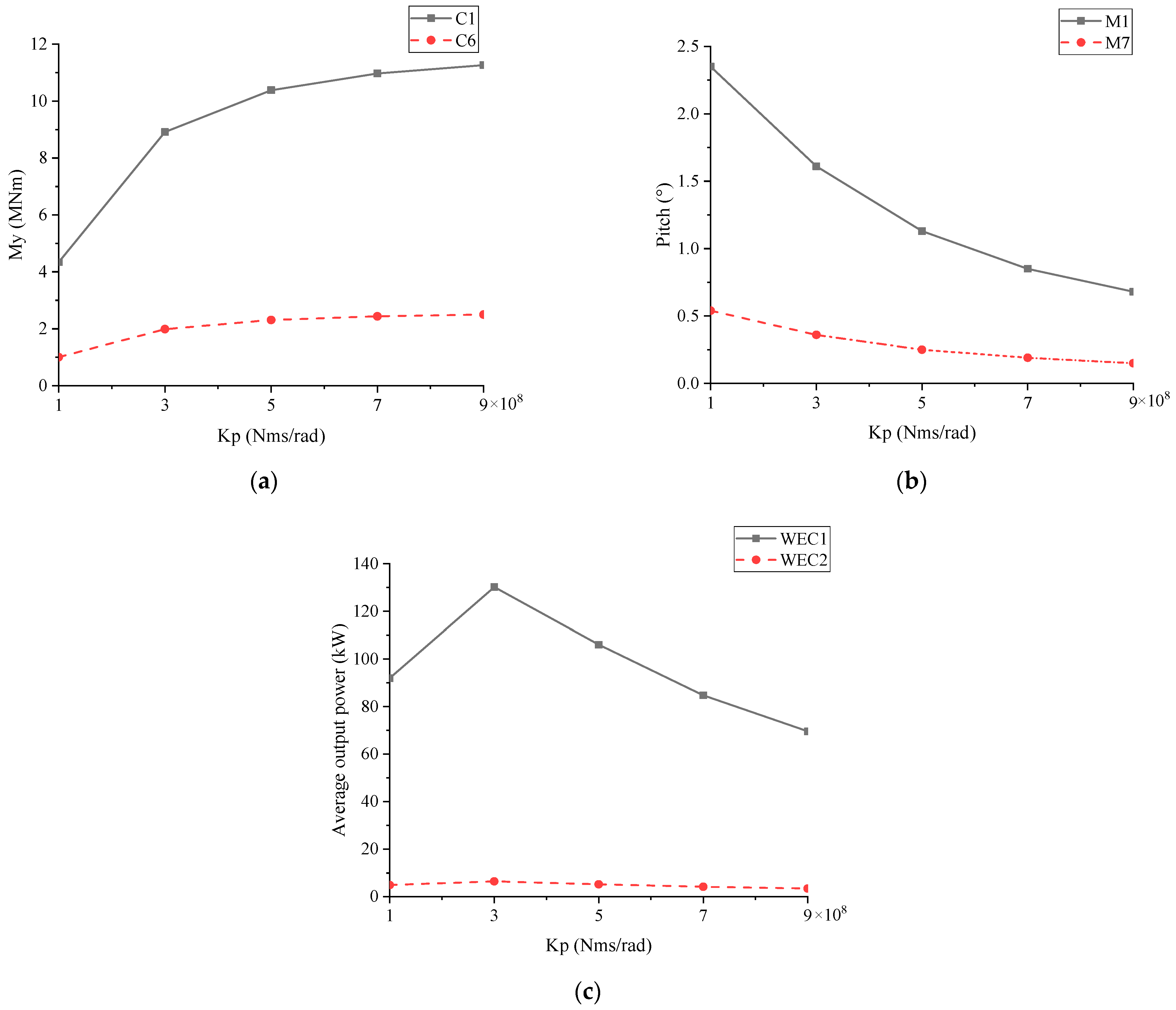
3.1. Damping Effect on Wave Power Generation Performance
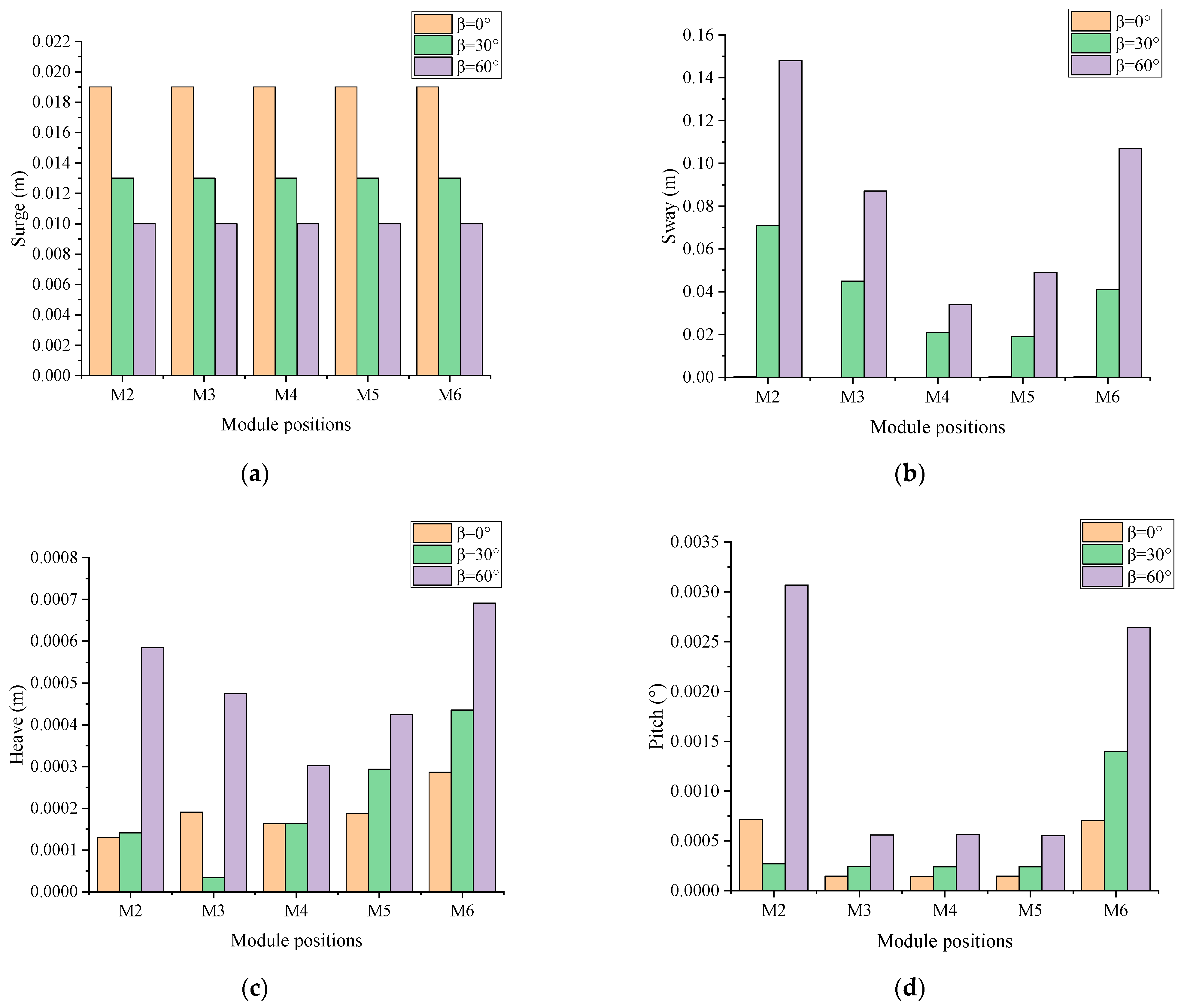
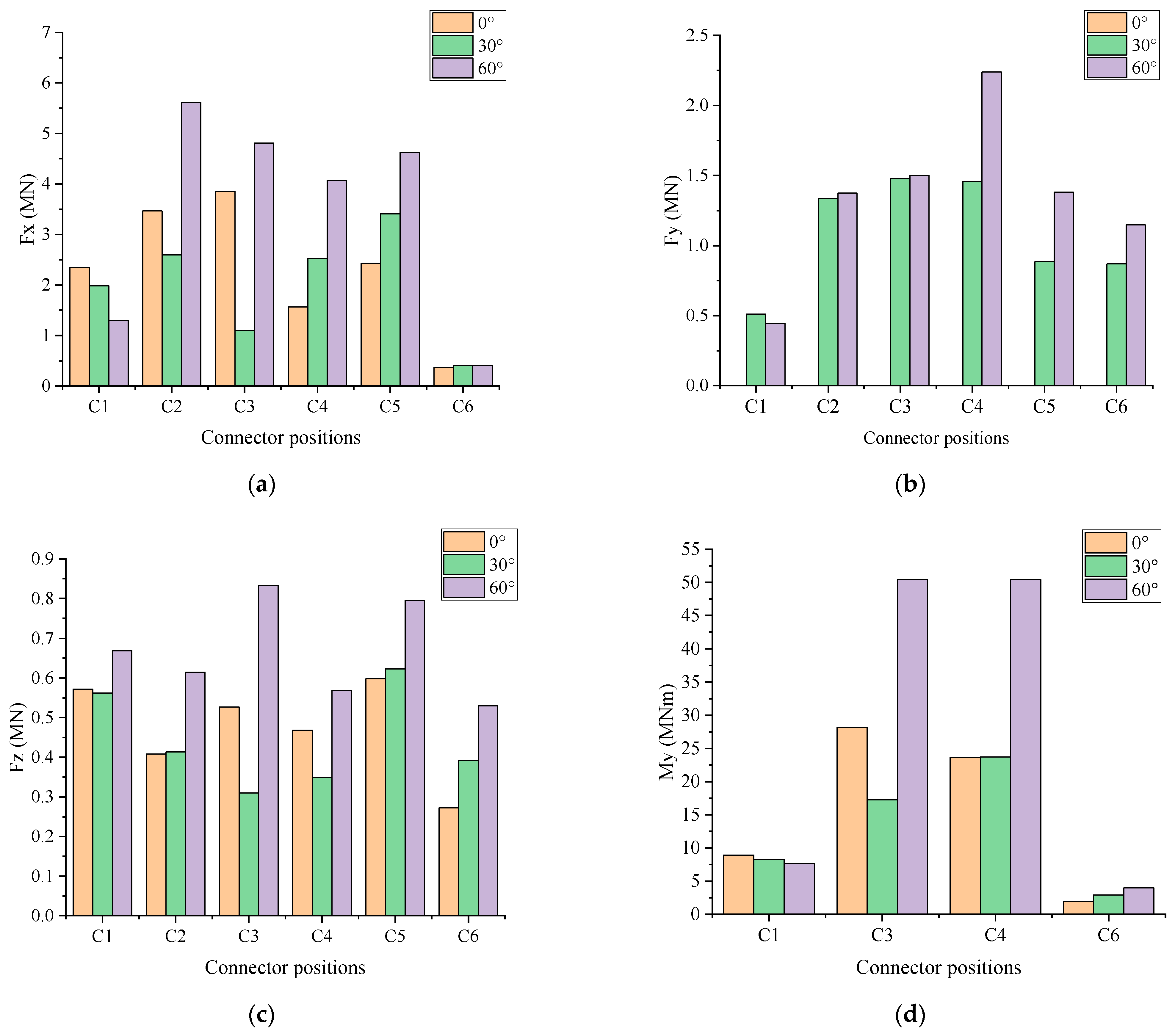
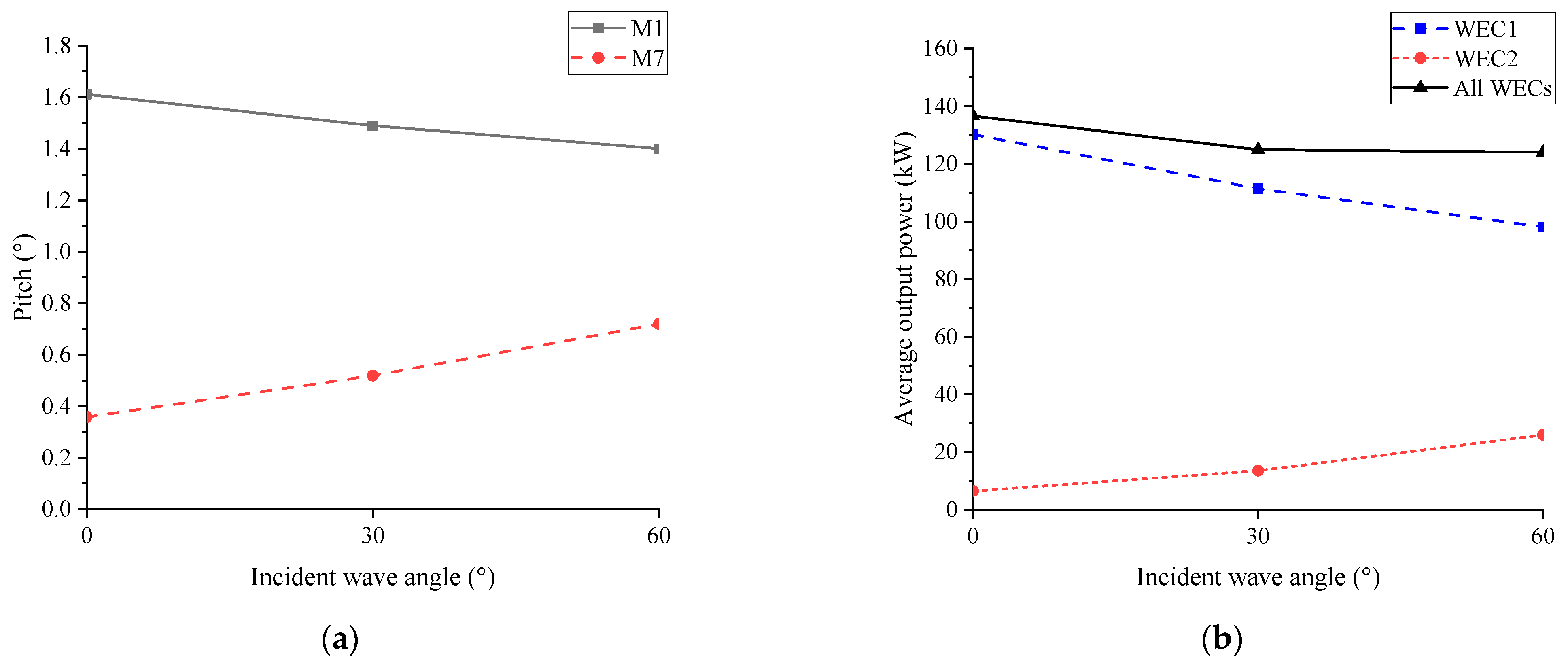
3.2. Effect of the Incident Wave Angle
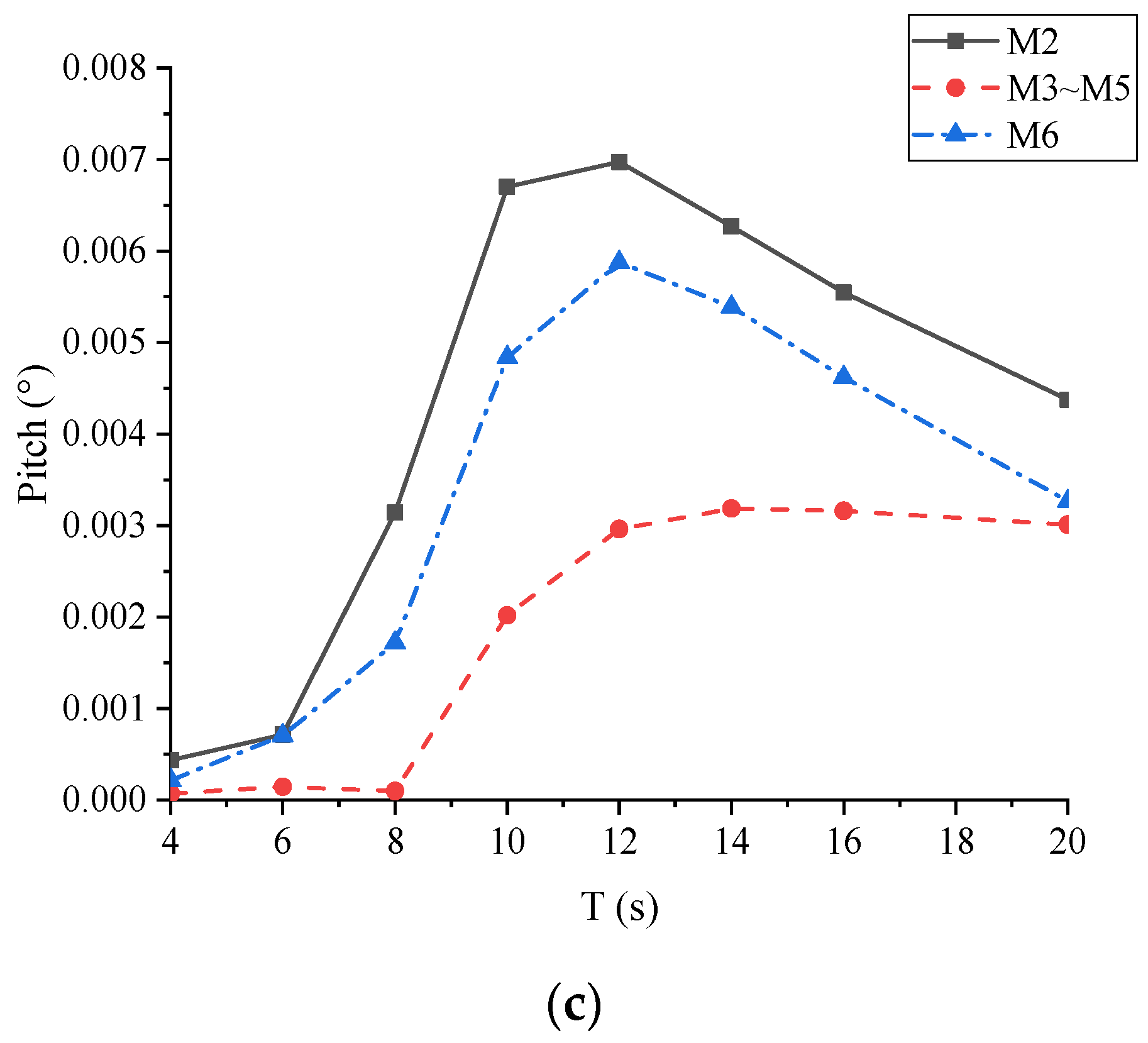
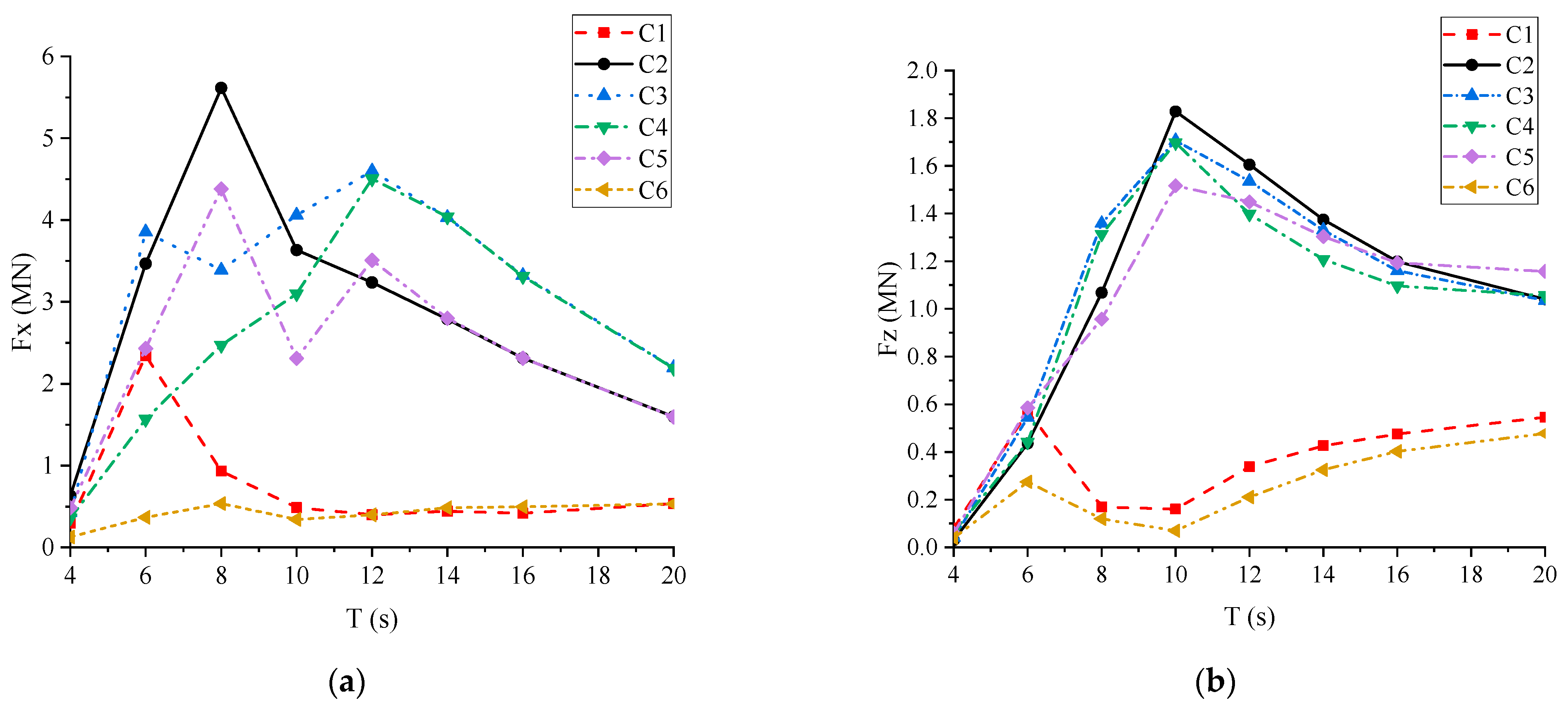
3.3. Effect of the Wave Period
3.4. Effect of the Module Quantity
3.5. Extreme Sea Conditions
4. Conclusions
- (1)
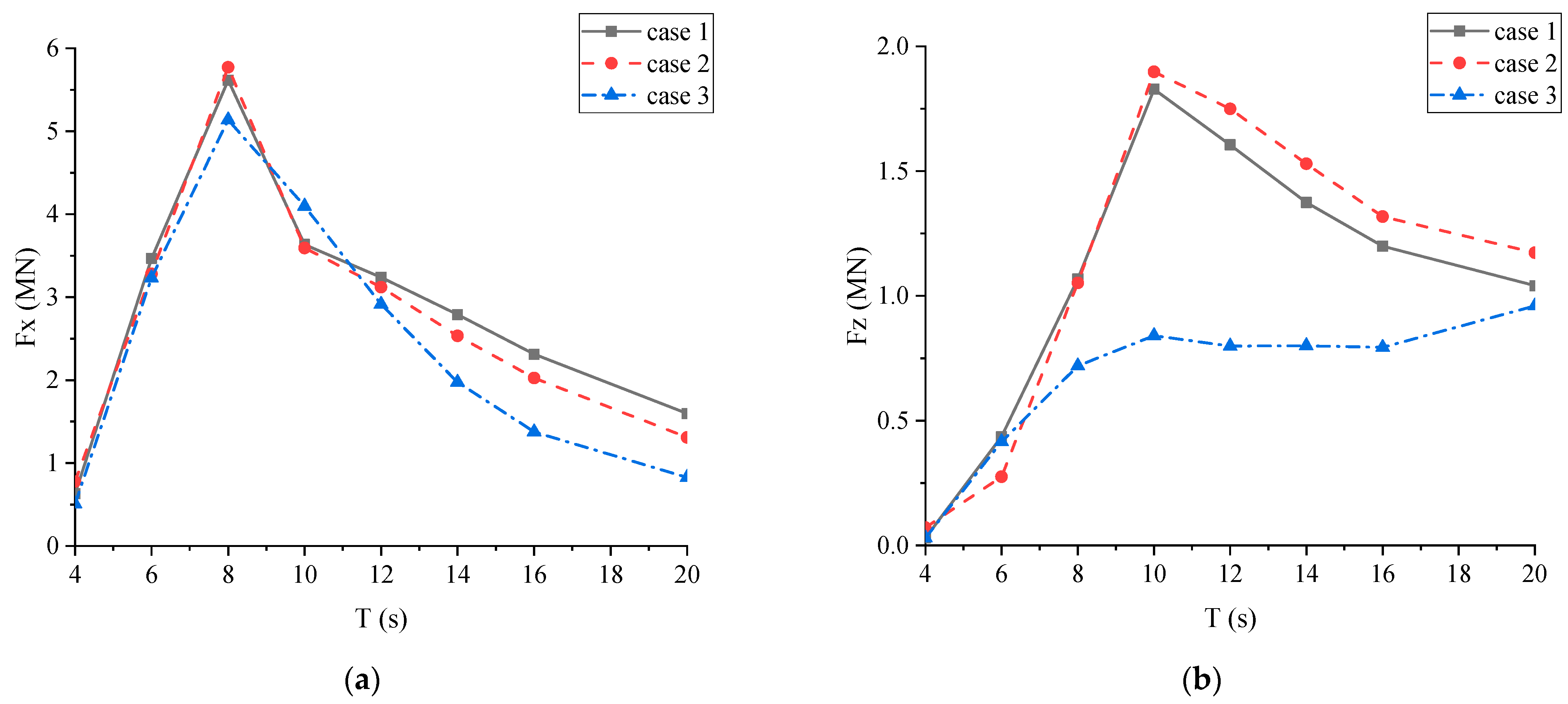
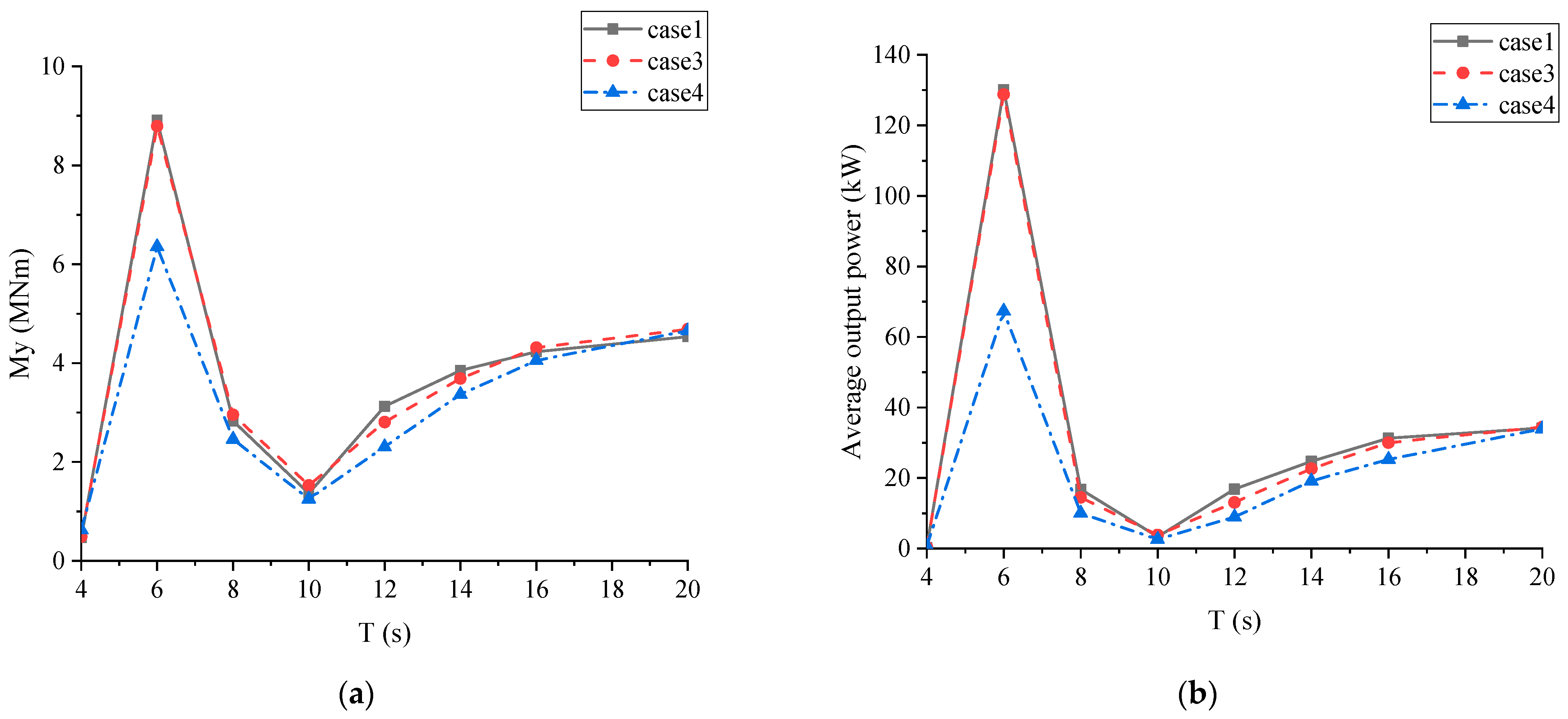
- The outermost floating artificial reefs with WECs showed good capacity of wave attenuation and energy conversion. The main hydrodynamic responses of the MFS system were sensitive to both the incident wave angle and the wave period. Larger incident wave angles tended to lead to the increase in both motion responses and connector forces, due to less shielding effect from the outermost artificial reef. The motion responses of the MFS system were more sensitive to long wave periods than short wave periods. In addition, the optimal PTO damping and the corresponding optimal wave period of the WEC for the MFS system were about 3 × 108 Nms/rad and 6 s, respectively. That was mainly due to the relationship between the structure dimension and the wavelength.
- (2)
- More modules can provide a better shielding effect for the central module, so that the MFS system can be of better stability with expansion. The extreme connector loads did not seem significantly sensitive to the increase in the module quantity, which provided feasibility for the expansion of the MFS system with more modules. In addition, more inner modules were beneficial for improving the performance of the WECs to some degree.
- (3)
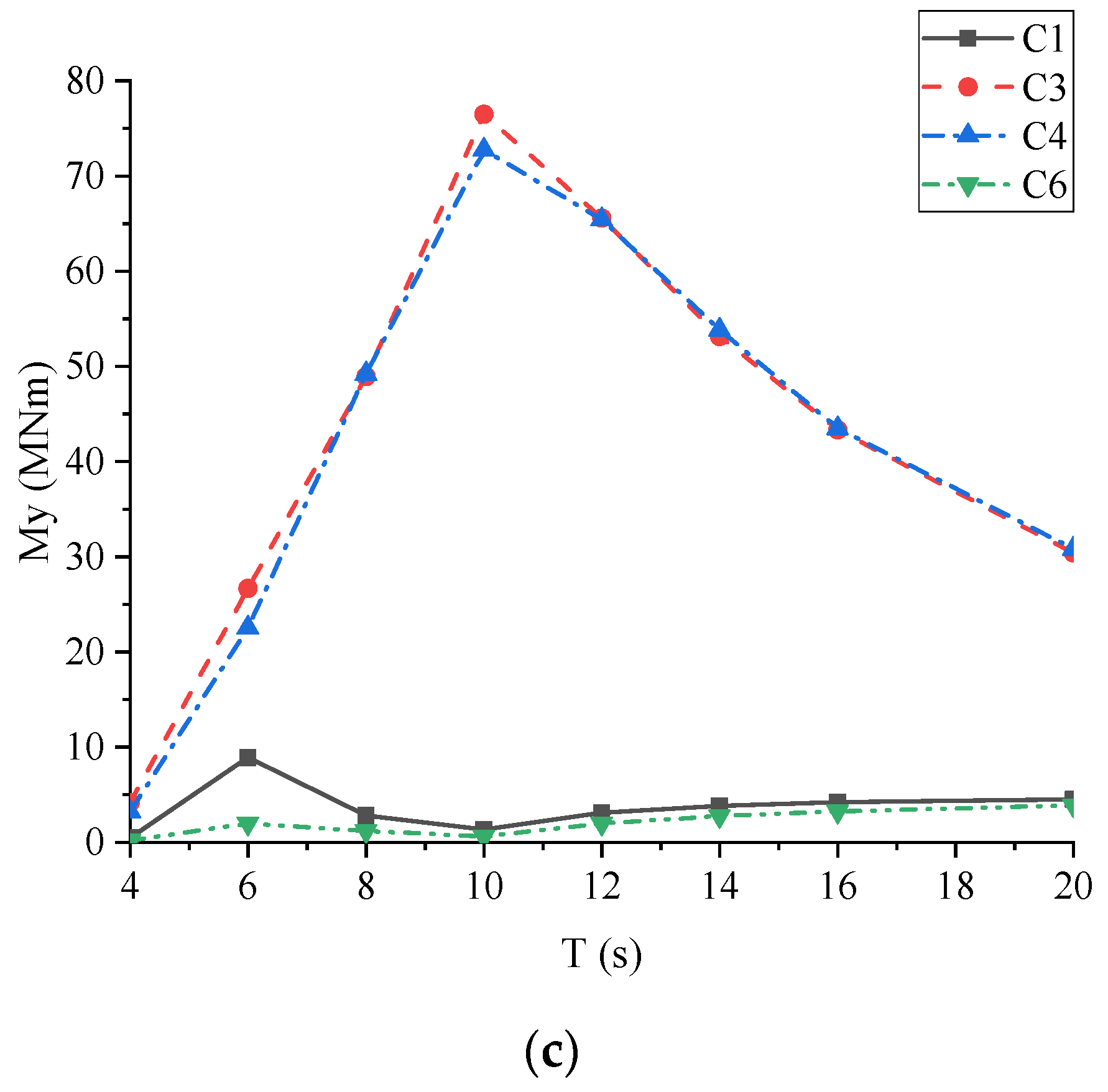
- A survival strategy of the MFS system with inner hinge connectors was proposed for reducing extreme connector loads, especially for the bending moment (My) and the shear force (Fz). The extreme connector Fz and My could be efficiently reduced by about 50 and 95%, respectively. Both the heave and the pitch responses of the MFS system were limited well, due to the good performance of the tension legs. The security of the MFS system under typical extreme sea conditions was verified.
5. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| DOF | Degree of freedom |
| Fx | Horizontal force of connector |
| Fz | Shear force of connector |
| H | Wave height |
| JONSWAP | Joint North Sea Wave Project |
| Kp | Damping coefficient |
| MFS | Modular floating structure |
| My | Pitch bending moment of connector |
| PTO | Power take-off |
| T | Wave period |
| TLP | Tension-leg platform |
| WEC | Wave energy converter |
| VLFS | Very large floating structure |
| θ | Incident wave angle |
References
- Strain, E.M.A.; Alexander, K.A.; Kienker, S.; Morris, R.; Jarvis, R.; Coleman, R.; Bollard, B.; Firth, L.B.; Knights, A.M.; Grabowski, J.H.; et al. Urban blue: A global analysis of the factors shaping people’s perceptions of the marine environment and ecological engineering in harbours. Sci. Total Environ. 2019, 658, 1293–1305. [Google Scholar] [CrossRef]
- Wang, C.M.; Watanabe, E.; Utsunomiya, T. Very Large Floating Structures; Taylor and Francis: Abingdon, UK, 2014. [Google Scholar]
- Flikkema, M.; Waals, O. Space@ Sea the floating solution. Front. Mar. Sci. 2019, 6, 553. [Google Scholar] [CrossRef]
- Koekoek, M. Connecting Modular Floating Structures; Gemeente: Rotterdam, The Netherlands, 2010. [Google Scholar]
- Drummen, I.; Olbert, G. Conceptual design of a modular floating multi-purpose island. Front. Mar. Sci. 2021, 8, 615222. [Google Scholar] [CrossRef]
- Souravlias, D.; Dafnomilis, I.; Ley, J.; Assbrock, G.; Duinkerken, M.B.; Negenborn, R.R.; Schott, D.L. Design framework for a modular floating container terminal. Front. Mar. Sci. 2020, 7, 545637. [Google Scholar] [CrossRef]
- Dai, J.; Zhang, C.; Lim, H.V.; Ang, K.K.; Qian, X.; Wong, J.L.H.; Tan, S.T.; Wang, C.L. Design and construction of floating modular photovoltaic system for water reservoirs. Energy 2020, 191, 116549. [Google Scholar] [CrossRef]
- Tseranidis, S.; Theodoridis, L.; Loukogeorgaki, E.; Angelides, D. Investigation of the condition and the behavior of a modular floating structure by harnessing monitoring data. Mar. Struct. 2016, 50, 224–242. [Google Scholar] [CrossRef]
- Ren, N.; Wu, H.; Ma, Z.; Ou, J. Hydrodynamic analysis of a novel modular floating structure system with central tension-leg platforms. Ships Offshore Struc. 2020, 15, 1011–1022. [Google Scholar] [CrossRef]
- Loukogeorgaki, E.; Lentsiou, E.N.; Aksel, M.; Yagci, O. Experimental investigation of the hydroelastic and the structural response of a moored pontoon-type modular floating breakwater with flexible connectors. Coast. Eng. 2017, 121, 240–254. [Google Scholar] [CrossRef]
- Jiang, C.; El Moctar, O.; Schellin, T.E. Hydrodynamic Sensitivity of Moored and Articulated Multibody Offshore Structures in Waves. J. Mar. Sci. Eng. 2021, 9, 1028. [Google Scholar] [CrossRef]
- Michailides, C.; Loukogeorgaki, E.; Angelides, D.C. Response analysis and optimum configuration of a modular floating structure with flexible connectors. Appl. Ocean Res. 2013, 43, 112–130. [Google Scholar] [CrossRef]
- Jiang, D.; Tan, K.H.; Dai, J.; Ang, K.K.; Nguyen, H.P. Behavior of concrete modular multi-purpose floating structures. Ocean Eng. 2021, 229, 108971. [Google Scholar] [CrossRef]
- Liang, N.-K.; Huang, J.-S.; Li, C.-F. A study of spar buoy floating breakwater. Ocean Eng. 2004, 31, 43–60. [Google Scholar] [CrossRef]
- Ng, A.; Ölçer, A. A new human comfort model onboard a vessel based on Sugeno type fuzzy inference system. Ocean Eng. 2012, 55, 116–124. [Google Scholar] [CrossRef]
- Wang, G.; Drimer, N.; Goldfeld, Y. Modular floating structures (MFS) for offshore dwelling a hydrodynamic analysis in the frequency domain. Ocean Eng. 2020, 216, 107996. [Google Scholar] [CrossRef]
- Nguyen, H.; Wang, C.; Tay, Z.; Luong, V. Wave energy converter and large floating platform integration: A review. Ocean Eng. 2020, 213, 107768. [Google Scholar] [CrossRef]
- Li, L.; Ruzzo, C.; Collu, M.; Gao, Y.; Failla, G.; Arena, F. Analysis of the coupled dynamic response of an offshore floating multi-purpose platform for the Blue Economy. Ocean Eng. 2020, 217, 107943. [Google Scholar] [CrossRef]
- Cheng, Y.; Xi, C.; Dai, S.; Ji, C.; Cocard, M.; Yuan, Z.; Incecik, A. Performance characteristics and parametric analysis of a novel multi-purpose platform combining a moonpool-type floating breakwater and an array of wave energy converters. Appl. Energy 2021, 292, 116888. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, W.; Michailides, C.; Wan, L.; Kim, H.; Li, X. WEC shape effect on the motion response and power performance of a combined wind-wave energy converter. Ocean Eng. 2022, 250, 111038. [Google Scholar] [CrossRef]
- Ren, N.; Zhang, C.; Magee, A.R.; Hellan, Ø.; Dai, J.; Ang, K.K. Hydrodynamic analysis of a modular multi-purpose floating structure system with different outermost connector types. Ocean Eng. 2019, 176, 158–168. [Google Scholar] [CrossRef]
- Nguyen, H.; Wang, C.; Flocard, F.; Pedroso, D. Extracting energy while reducing hydroelastic responses of VLFS using a modular raft wec-type attachment. Appl. Ocean Res. 2019, 84, 302–316. [Google Scholar] [CrossRef]
- Cheng, Y.; Xi, C.; Dai, S.; Ji, C.; Collu, M.; Li, M.; Yuan, Z.; Incecik, A. Wave energy extraction and hydroelastic response reduction of modular floating breakwaters as array wave energy converters integrated into a very large floating structure. Appl. Energy 2022, 306, 117953. [Google Scholar] [CrossRef]
- Liang, M.; Xu, S.; Wang, X.; Ding, A. Experimental evaluation of a mooring system simplification methodology for reducing mooring lines in a VLFS model testing at a moderate water depth. Ocean Eng. 2021, 219, 107912. [Google Scholar] [CrossRef]
- Ren, Y.; Venugopal, V.; Shi, W. Dynamic analysis of a multi-column TLP floating offshore wind turbine with tendon failure scenarios. Ocean Eng. 2022, 245, 110472. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, H.; Xu, D.; Qi, E.; Tian, C.; Ding, J.; Wu, Y.; Lu, Y.; Li, Z. Experimental validation of network modeling method on a three-modular floating platform model. Coast. Eng. 2018, 137, 92–102. [Google Scholar] [CrossRef]
- Ding, J.; Geng, Y.; Xu, S.; Yang, W.; Xie, Z. Experimental study on responses of an 8-module VLFS considering different encounter wave conditions. Mar. Struct. 2021, 78, 102959. [Google Scholar] [CrossRef]
- Ren, N.; Wu, H.; Liu, K.; Zhou, D.; Ou, J. Hydrodynamic Analysis of a Modular Floating Structure with Tension-Leg Platforms and Wave Energy Converters. J. Mar. Sci. Eng. 2021, 9, 424. [Google Scholar] [CrossRef]
- Ohkura, Y. The roles and limitations of newspapers in environmental reporting. Case study: Isahaya Bay land reclamation project issue. Mar. Pollut. Bull. 2003, 47, 237–245. [Google Scholar] [CrossRef]
- Peduzzi, P. Sand, rarer than one thinks. Environ. Dev. 2014, 11, 208–218. [Google Scholar]
- Lima, J.S.; Zalmon, I.R.; Love, M. Overview and trends of ecological and socioeconomic research on artificial reefs. Mar. Environ. Res. 2019, 145, 81–96. [Google Scholar] [CrossRef]
- Wang, G.; Wan, R.; Wang, X.; Zhao, F.; Lan, X.; Cheng, H.; Tang, W.; Guan, Q. Study on the influence of cut-opening ratio, cut-opening shape, and cut-opening number on the flow field of a cubic artificial reef. Ocean Eng. 2018, 162, 341–352. [Google Scholar] [CrossRef]
- Wang, G.; Goldfeld, Y.; Drimer, N. Expanding coastal cities–Proof of feasibility for modular floating structures (MFS). J. Clean Prod. 2019, 222, 520–538. [Google Scholar] [CrossRef]
- Abrams, M. Building cities on the sea. Mech. Eng. 2020, 142, 42–47. [Google Scholar] [CrossRef]
- ANSYS, Inc. Aqwa User’s Manual; ANSYS, Inc.: Canonsburg, PA, USA, 2013. [Google Scholar]
- Wang, Z.; Zhou, L.; Dong, S.; Wu, L.; Li, Z.; Mou, L.; Wang, A. Wind wave characteristics and engineering environment of the South China Sea. J. Ocean Univ. China 2014, 13, 893–900. [Google Scholar] [CrossRef]
- Faraci, C.; Musumeci, R.E.; Marino, M.; Ruggeri, A.; Carlo, L.; Jensen, B.; Foti, E.; Barbaro, G.; Elsaßer, B. Wave- and current-dominated combined orthogonal flows over fixed rough beds. Cont. Shelf Res. 2021, 220, 104403. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Units |
|---|---|---|
| Hexagonal floating structure | ||
| Side length; height; height of mass center | 20; 12; −5 | m |
| water depth; draft | 80; 10 | m |
| Mass; displacement | 6000; 10,650 | t |
| Ixx = Iyy; Izz | 9.6 × 108; 1.2 × 109 | kg·m2 |
| Tension-leg dimension | D = 1.2; T = 0.04; L = 70 | m |
| Steel tension leg E | 2.1 × 1011 | N/m2 |
| Stiffness of fenders | 1.0 × 107 | N/m |
| Floating artificial reef | ||
| Dimension; reef wall spacing | 15 × 20 × 11; 1 | m |
| draft; height of mass center | 10; −5 | m |
| Mass = displacement | 800.5 | t |
| Ixx; Iyy; Izz | 1.2 × 108; 9.8 × 107; 1.0 × 108 | kg·m2 |
| Adjacent distance | 3 | m |
| Porosity | 20% |
| Number | Structural Layout | Connector Types |
|---|---|---|
| Case 1 |  | H-h-f-f-h-H |
| Case 2 |  | h-f-f-h |
| Case 3 |  | H-h-h-H |
| Case 4 |  | H-H |
| Surge (m) | Heave (m) | Pitch (°) | Ft (MN) | Fx (MN) | Fz (MN) | My (MNm) | Power (kW) | |
|---|---|---|---|---|---|---|---|---|
| H-h-f-f-h-H | (Case 1) | |||||||
| Max. | 0.936 (M2~M5) | 0.0076 (M2) | 0.015 (M2) | 14.194 (M2) | 16.000 (C2) | 5.845 (C3) | 239.696 (C4) | 607.224 (WEC1) |
| Mean | 0.221 | - | 0.004 | 11.309 | 3.139 | 1.154 | 48.672 | 38.214 |
| STD | 0.164 | 0.0018 | 0.0028 | 1.0967 | 2.356 | 0.830 | 34.867 | 53.957 |
| H-h-h-h-h-H | (new) | |||||||
| Max. | 0.937 (M2~M5) | 0.0084 (M2) | 0.016 (M3) | 14.121 (M2) | 15.538 (C2) | 2.722 (C2) | 13.433 (C1) | 608.775 (WEC1) |
| Mean | 0.222 | - | 0.004 | 11.307 | 3.143 | 0.552 | 2.715 | 38.206 |
| STD | 0.166 | 0.0014 | 0.0033 | 1.065 | 2.359 | 0.413 | 2.021 | 53.973 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Ren, N.; Li, X.; Ou, J. Hydrodynamic Analysis of a Novel Modular Floating Structure System Integrated with Floating Artificial Reefs and Wave Energy Converters. J. Mar. Sci. Eng. 2022, 10, 1091. https://doi.org/10.3390/jmse10081091
Li Y, Ren N, Li X, Ou J. Hydrodynamic Analysis of a Novel Modular Floating Structure System Integrated with Floating Artificial Reefs and Wave Energy Converters. Journal of Marine Science and Engineering. 2022; 10(8):1091. https://doi.org/10.3390/jmse10081091
Chicago/Turabian StyleLi, Yanwei, Nianxin Ren, Xiang Li, and Jinping Ou. 2022. "Hydrodynamic Analysis of a Novel Modular Floating Structure System Integrated with Floating Artificial Reefs and Wave Energy Converters" Journal of Marine Science and Engineering 10, no. 8: 1091. https://doi.org/10.3390/jmse10081091
APA StyleLi, Y., Ren, N., Li, X., & Ou, J. (2022). Hydrodynamic Analysis of a Novel Modular Floating Structure System Integrated with Floating Artificial Reefs and Wave Energy Converters. Journal of Marine Science and Engineering, 10(8), 1091. https://doi.org/10.3390/jmse10081091