1. Introduction
Amphibious vehicles are a kind of special transportation that have both the ability to travel on land and in water. Amphibious vehicles are often used in the transportation of personnel and materials, as well as emergency rescue in complex terrain with alternating land and water [
1]. The resistance and propulsion performance are the key indexes to the comprehensive performance of amphibious vehicles. As an important part of the amphibious vehicle family, wheeled amphibious vehicles have high land navigation speed and excellent maneuverability. However, due to its approximate blunt body shape and exposed wheels, wheeled amphibious vehicles have relatively large navigation resistance. Reducing the navigation resistance to improve speed or save power is important and difficult work for wheeled amphibious vehicles.
In this regard, many scholars have carried out research on resistance characteristics and improvement. As early as 1970, Ehrlich et al. [
2] pointed out the variation law of frictional resistance, shape resistance and wave-making resistance with speed by collecting a large number of resistance curves of wheeled amphibious vehicles. In addition, they proposed various approaches to reduce the resistance of amphibious vehicles, such as stringing together multiple amphibious vehicles, adopting a light-load planing vehicle body and lift wings. In 2014, Peng and Liu [
3] improved the resistance characteristics of an amphibious vehicle by installing flaps at the vehicle stern. In 2015, Ju et al. [
4] explored the effect of the trim angle on resistance for a light-load wheeled amphibious vehicle based on numerical simulation. They summed up the effect law of trim angle on resistance and provided the reasonable trim range of the light-load wheeled amphibious vehicle at different speeds. In addition, Rahman et al. [
5] applied air bubble resistance improvement technology to wheeled amphibious vehicles in 2020, where the resistance reduction could reach up to 10.89%. In 2022, Sun et al. [
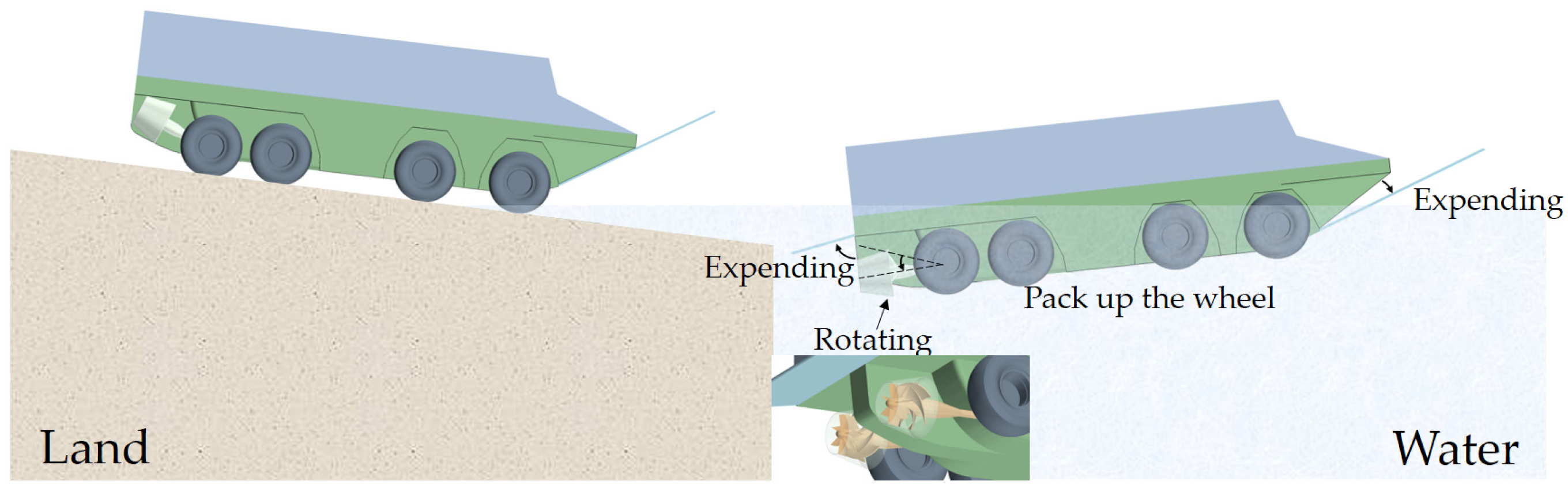
6] designed a wheeled amphibious truck with two rotatable carriages, where the carriages swivel into water to increase the amphibious vehicle’s displacement and seal the sides of the wheel wells. Therefore, the draft of the amphibious vehicle could be reduced and the flow field around wheel wells could be improved, both of which were beneficial for reducing the resistance of the amphibious vehicle.
Some scholars have carried out research on the wheel resistance characteristics. In 2007, Wu et al. [
7] used steady methods to numerically simulate and analyze the resistance characteristics of a simplified wheeled amphibious vehicle model with a fixed attitude. By comparing the resistance difference between the amphibious vehicles when wheels were retracted and not retracted, they found that retracting wheels and closing wheel wells could reduce resistance by 40 percent. In 2020, Kang et al. [
8] numerically simulated the resistance characteristics of a high-speed planing wheeled amphibious vehicle in three states, including no wheel retracted, front wheels retracted, and all wheels retracted. They indicated that retracting wheels could smooth out the streamlines at the vehicle’s bottom, which could effectively improve the flow field and reduce vortices. In addition, Zhou and Zhang [
9] compared the resistance of amphibious vehicles with and without wheel openings and found that the resistance of amphibious vehicles with openings was greater. They proposed that retracting wheels and closing wheel wells could reduce vehicle resistance. At present, retracting wheels is one of the methods widely used in amphibious vehicles to reduce resistance. Some scholars have also carried out research on the retracting mechanism of wheels [
10,
11,
12].
In general, there are many factors that affect the navigation resistance characteristics of the wheeled amphibious vehicles. The research on the resistance and improvement of wheeled amphibious vehicles mainly focuses on residual resistance. On the one hand, resistance improvement was achieved from the perspective of improving attitude, such as reducing the draft of amphibious vehicles by adopting planing vehicle body, lift wings and pontoons, such as optimizing the trim angle of amphibious vehicles by adjusting the angle of the bow breakwater and the stern flap [
13,
14,
15,
16]. On the other hand, resistance improvement was achieved by reducing the local shape resistance of amphibious vehicle part [
17], such as reducing the negative effect of wheels on the resistance of amphibious vehicles by retracting the wheels. However, most of the current research on the wheel resistance characteristics is qualitative and lacks a quantitative basis, which are supplemented in this paper. In addition, the resistance improvement approaches for wheels are very simple. More resistance improvement approaches are proposed in this paper.
The research object of this paper is a medium-speed as well as heavy-load condition pump-jet-propelled wheeled amphibious vehicle (PJPWAV). Compared with conventional stern plate type waterjets, pump-jets have a higher propulsion efficiency at medium and low speeds. However, since pump-jets are completely submerged in water and the sufficient distance between pump-jets and vehicle body is required to avoid excessive thrust deduction, the PJPWAV usually reserve a considerable amount of space at the vehicle stern for the installation of the pump-jets. Therefore, compared with the conventional stern plate type waterjet-propelled wheeled amphibious vehicle (WJPWAV), the stern buoyancy of the PJPWAV is relatively smaller, the aft trim is more serious, and wheels are more strongly rushed by flow. By comparing the resistance components of wheeled amphibious vehicles using two propulsion forms under the same displacement and same working conditions, it is found that the proportion of wheel resistance in the total resistance of the PJPWAV is about twice that of the WJPWAV. Therefore, the resistance characteristics of wheels are more critical for the PJPWAV, and it is necessary to carry out further research on the resistance characteristics of wheels.
This study discusses the influence of wheels on total resistance for the PJPWAV. By decomposing the hydrodynamic effect of the wheels, the influence degree of each effect of the wheels is quantified, and the hydro-mechanism of each effect on total resistance is deeply explored. Finally, the corresponding resistance improvement approaches are proposed in a targeted manner, and the self-propulsion performance improvement effect of the resistance improvement model is also predicted.
3. Resistance Characteristics of the Amphibious Vehicle
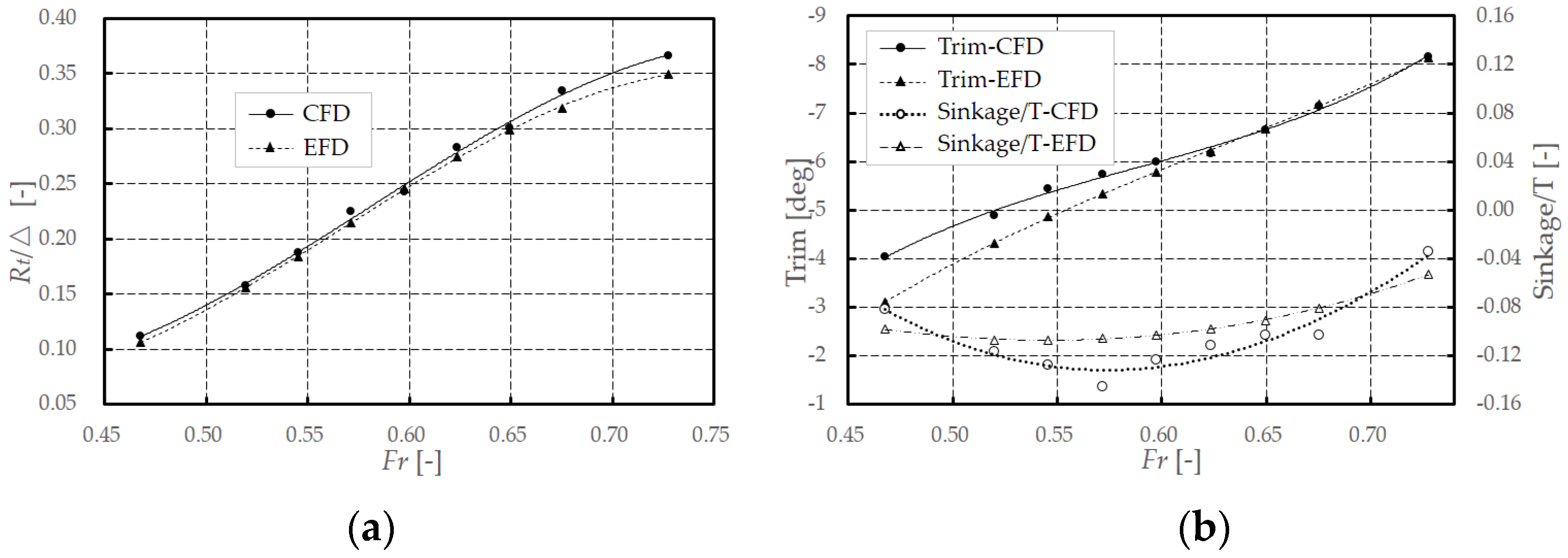
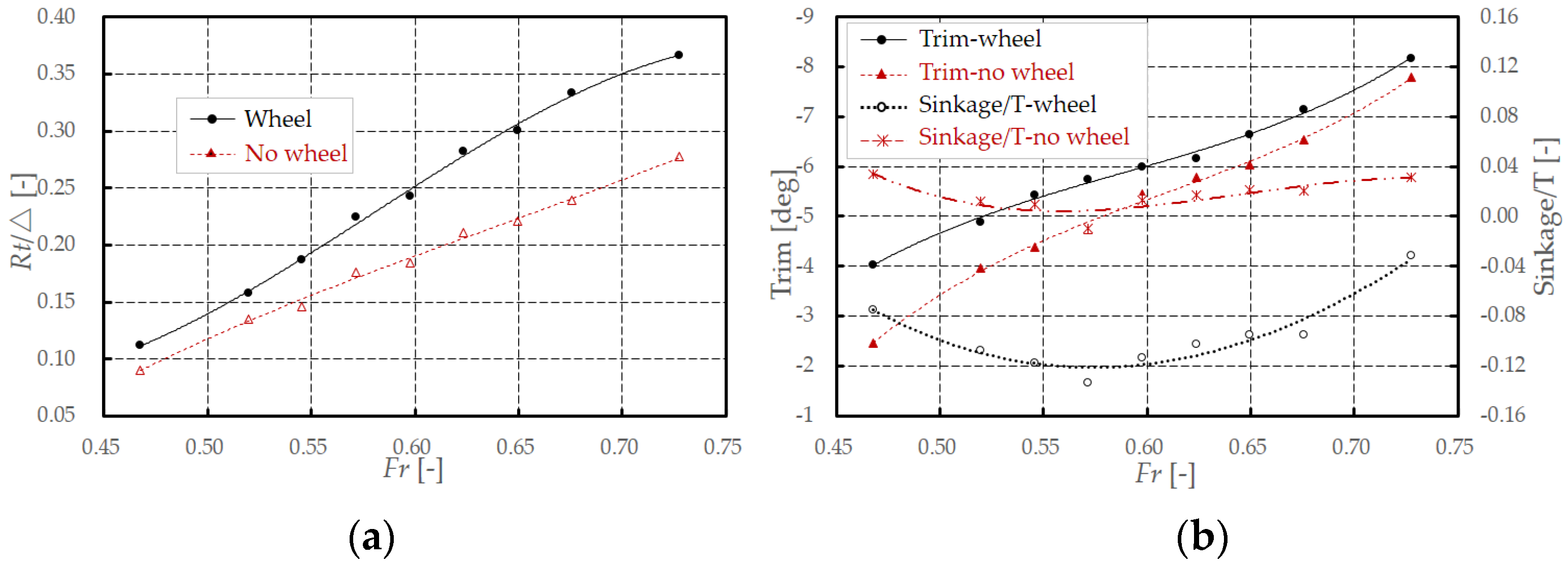
In order to understand the influence of the wheels on the resistance of the PJPWAV, this paper compared the resistance of the bare vehicle with and without wheels, as shown in
Figure 8 and
Figure 9. It can be seen that, under the influence of the wheels, the resistance of the amphibious vehicle increases significantly, and it becomes more obvious with the speed increase. At the same time, the draft and aft trim of the amphibious vehicle are also increased, and the change in draft is more obvious.
There are two reasons for the resistance variation caused by the wheels: the first reason is that installing the wheels changes the vehicle geometry; the second reason is that installing the wheels changes the vehicle attitude. The increased resistance due to geometric changes can be reduced by improving the local structure and flow field of the vehicle. The increased resistance due to attitude changes can be reduced from the perspective of adjusting attitude. By analyzing the influence and hydro-mechanism of each reason, the resistance improvement approaches can be proposed in a focused and targeted way, which is the basis for quickly and efficiently improving the resistance characteristics of the amphibious vehicle. Therefore, these two reasons need to be broken down and studied individually.
By comparing the amphibious vehicles with and without wheels, only the overall influence of two reasons can be obtained. This is insufficient for the intended study. In order to decompose these two reasons, this paper referred to the hull-waterjet interaction research method of waterjet propelled ships. This method proposed that there were two main reasons for the resistance increase caused by the waterjet: the first reason was the installation of the waterjet changed the hull geometry, and the suction as well as jet effect of the pump-jet changed the stern flow field; the second reason was the installation and operation of the waterjet changed the hull attitude [
33,
34,
35,
36]. This is very similar to studying the effect of the wheels on the resistance of the amphibious vehicles. This method referred to the first reason as the local effect and the second reason as the global effect and proposed a transitional hull model with the same geometry as the self-propelled hull (both with waterjet) and the same attitude as the bare hull. The resistance difference between the transition hull model and the bare hull was the local effect, and the resistance difference between the self-propelled hull and the transition hull model was the global effect.
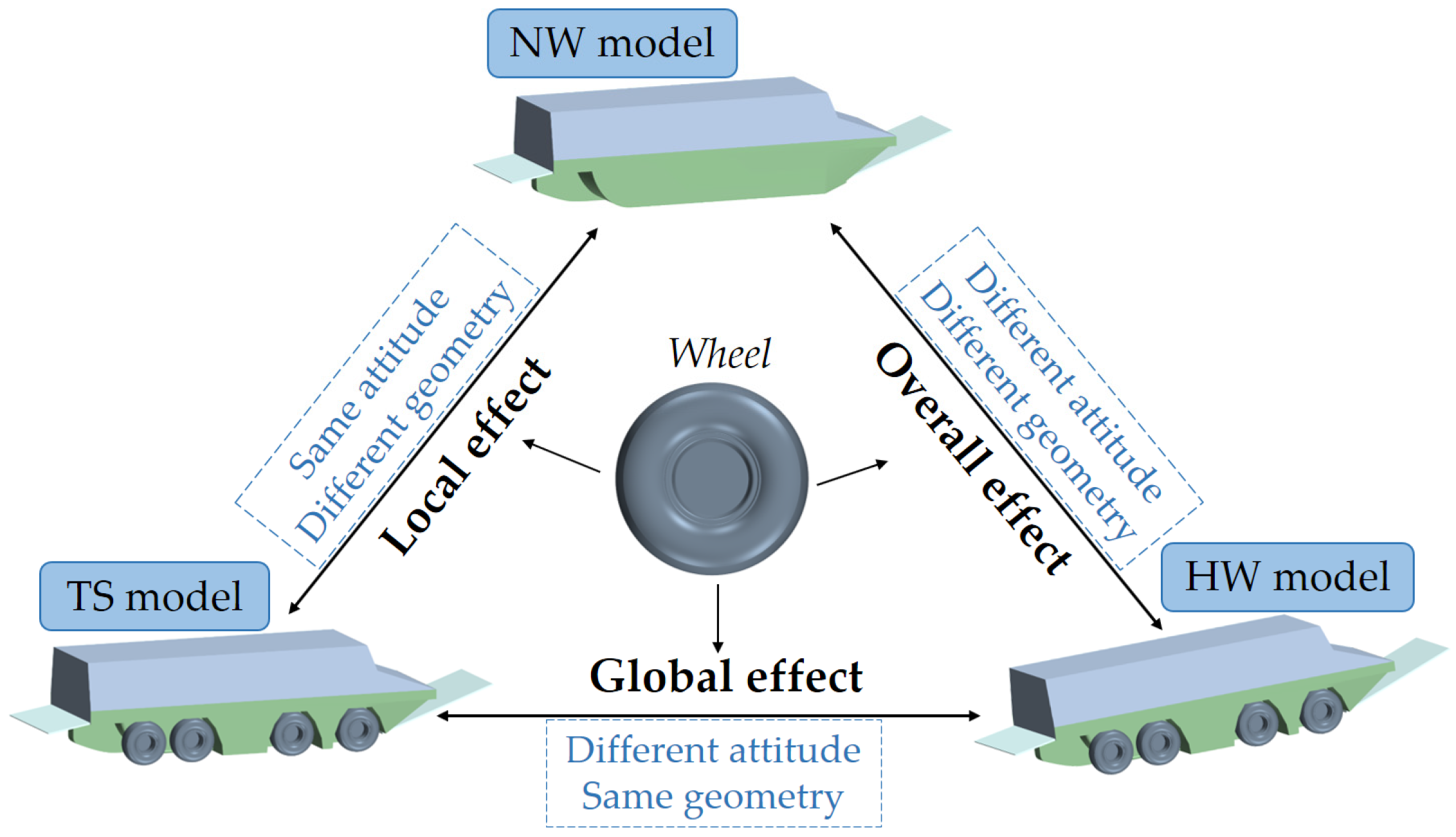
According to this method, in this paper, the influence of the geometry change caused by the wheels on the resistance was called the local effect, and the influence of the attitude variation caused by the wheels on the resistance was called the global effect. In addition, a transition model with wheels was proposed, which has the same attitude as the amphibious vehicle without wheels. For the convenience of explanation, this paper called the amphibious vehicle model without wheels as the NW (No Wheels) model, the amphibious vehicle model with wheels as the HW (Have Wheels) model, and the newly proposed amphibious vehicle transition model as the TS (Transitional State) model. The relevant details can be seen in
Figure 10. The attitude of the TS model is artificially constrained to be the same as the NW model.
In this study,
K1 and
K2 were used to describe the local effect and global effect, respectively.
K1 represents the resistance difference of the TS model relative to the NW model.
K2 represents the resistance difference of the HW model relative to the TS model. The definitions of
K1 and
K2 are shown in Equations (5) and (6):
where
Rt-TS is the total resistance of the TS model;
Rt-NW is the total resistance of the NW model; and
Rt-HW is the total resistance of the HW model.
In addition, the resistance increment coefficient
K was used to represent the overall effect of the wheels.
K includes the local effect and the global effect, and its definition is shown in Equation (7).
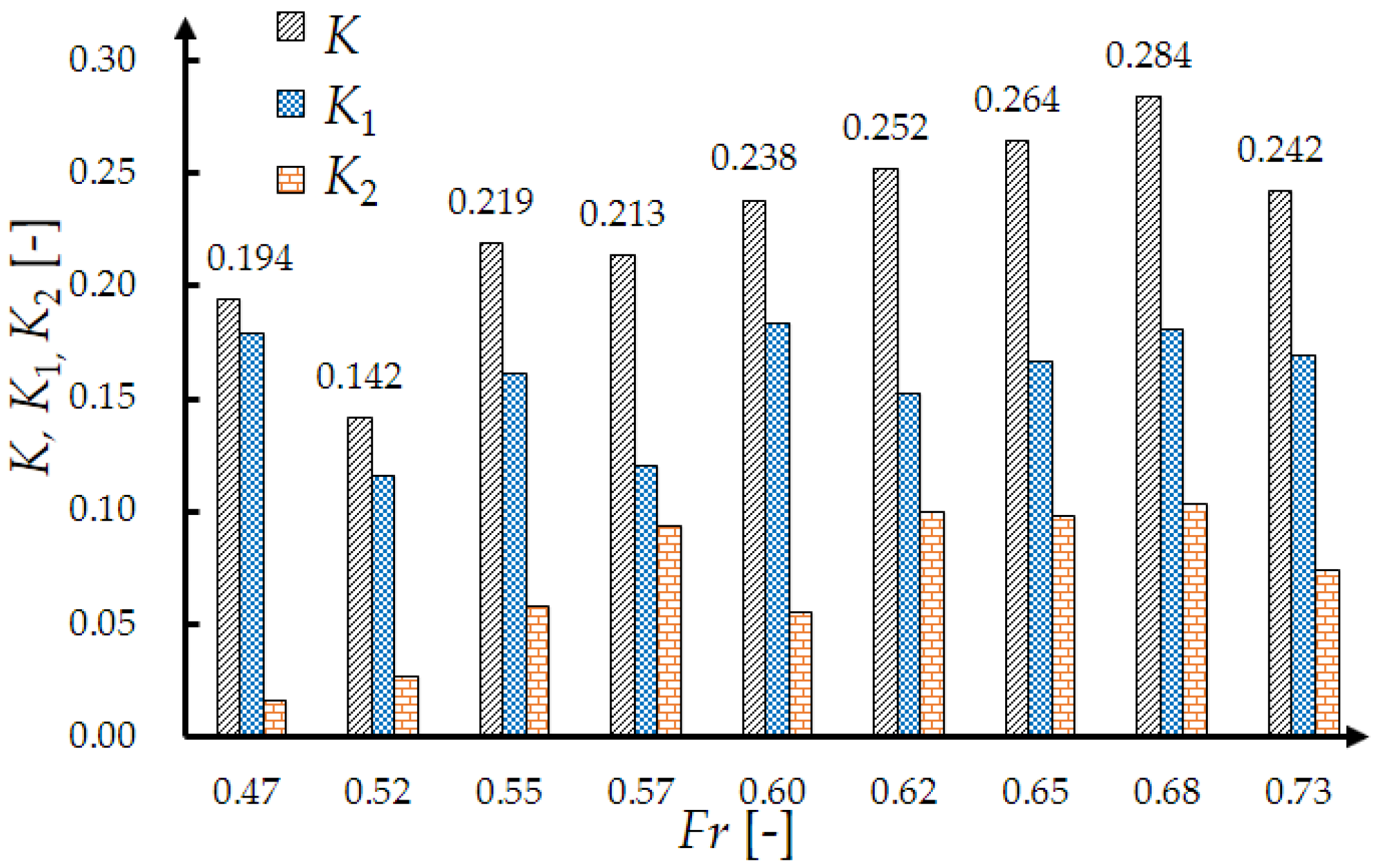
According to the same numerical simulation method to predict the resistance of the three models at various speeds,
K1,
K2, and
K can be obtained, as shown in
Figure 11.
At all simulated speeds, the resistance increment coefficient K is in the range of 0.142~0.284, and K reaches above 0.2 when 0.55 ≤ Fr ≤ 0.73, which indicates that the hydrodynamic effect of the wheels will increase the resistance of the amphibious vehicle by more than 20%. In addition, both K1 and K2 are positive, which represents that both the local effect and global effect of the wheels increase the resistance of the amphibious vehicle. It should be noted that K1 is significantly larger than K2 at each speed. Therefore, the local effect of the wheels has a more significant effect on the resistance of the amphibious vehicle than the global effect. In order to quickly and efficiently propose resistance improvement approaches, this paper analyzed the hydro-mechanism of K1 in detail, and briefly analyzed the reasons why K2 affects the resistance of the amphibious vehicle.
3.1. The Local Effect K1
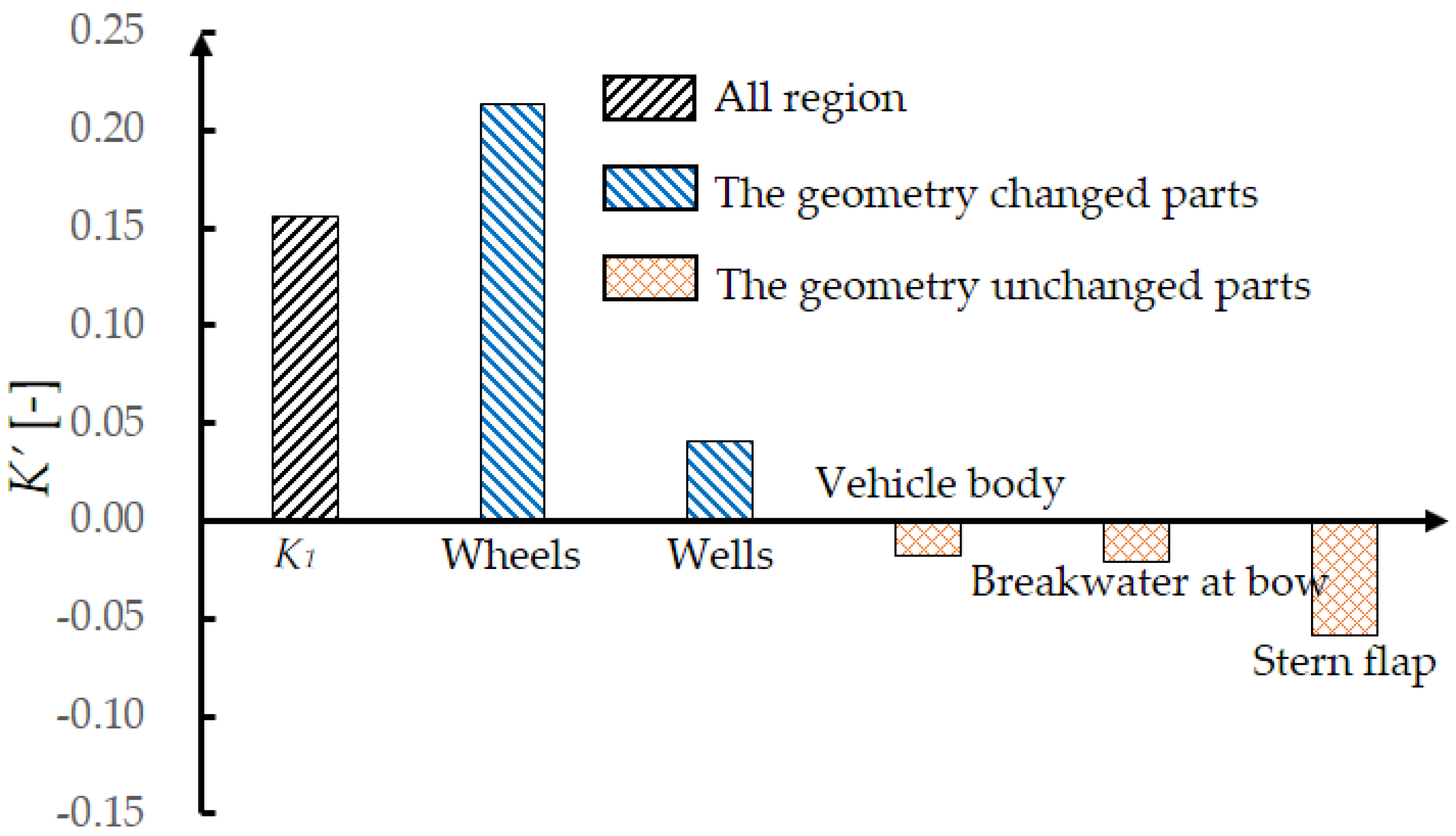
In order to clarify the hydro-mechanism of the local effect
K1, this paper divided the vehicle body into two parts, including the geometry changed parts and the geometry unchanged parts, and discussed them separately. The geometry changed parts include the wheels and wheel wells. The geometry unchanged parts include the bow breakwater, the stern flap, and the vehicle body outside the wheel wells.
Figure 12 shows the effect of the two parts.
K’ in
Figure 12 represents the resistance variation of vehicle parts, and its definition is shown in Equation (8).
where
δRPart is the part resistance difference between the TS model and the NW model.
It can be seen from
Figure 12 that the resistance of the geometry changed parts increases, and the resistance of the geometry unchanged parts decreases. The reasons for the resistance variation of each part will be discussed in detail below.
3.1.1. The Geometry Changed Parts
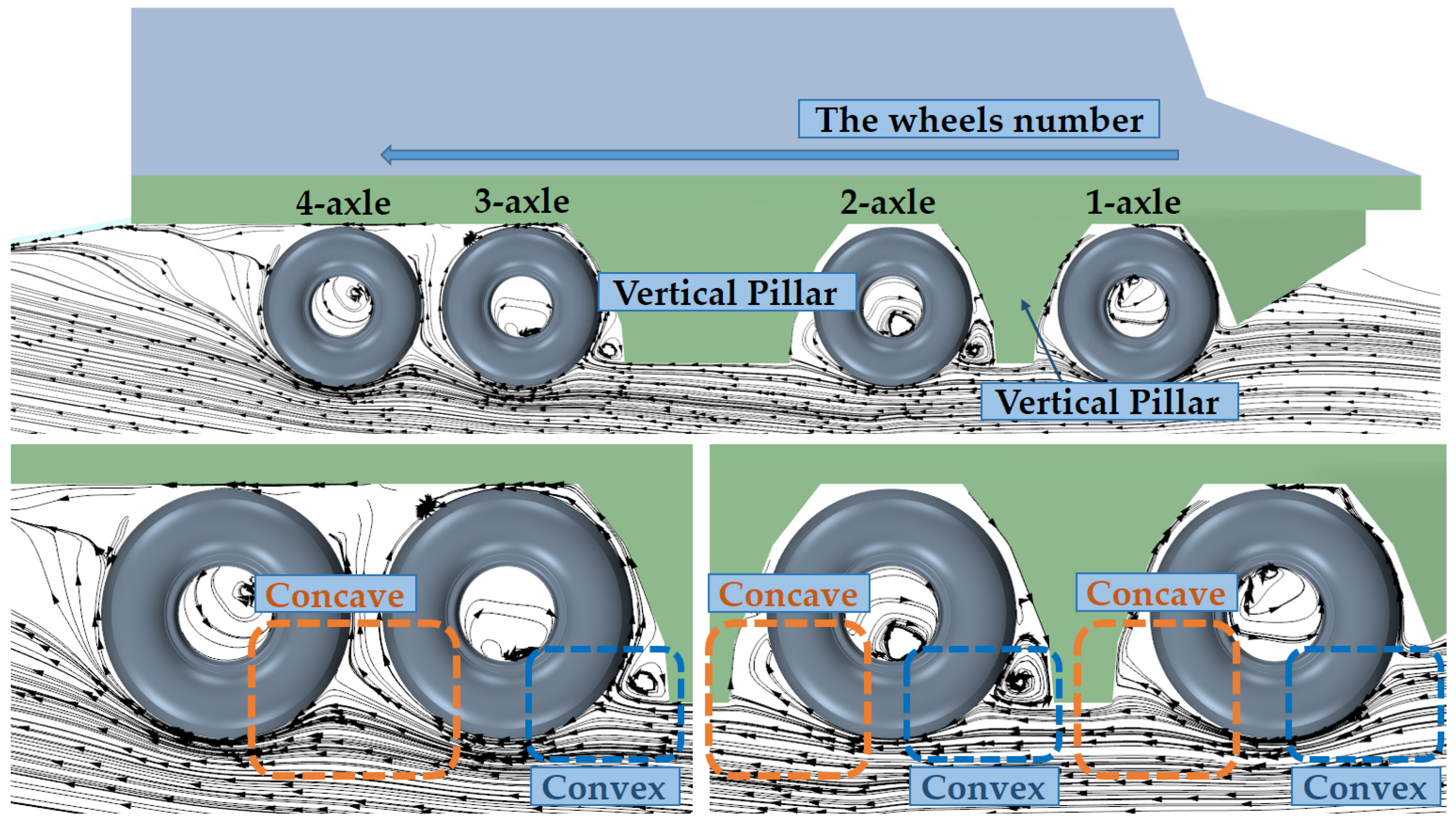
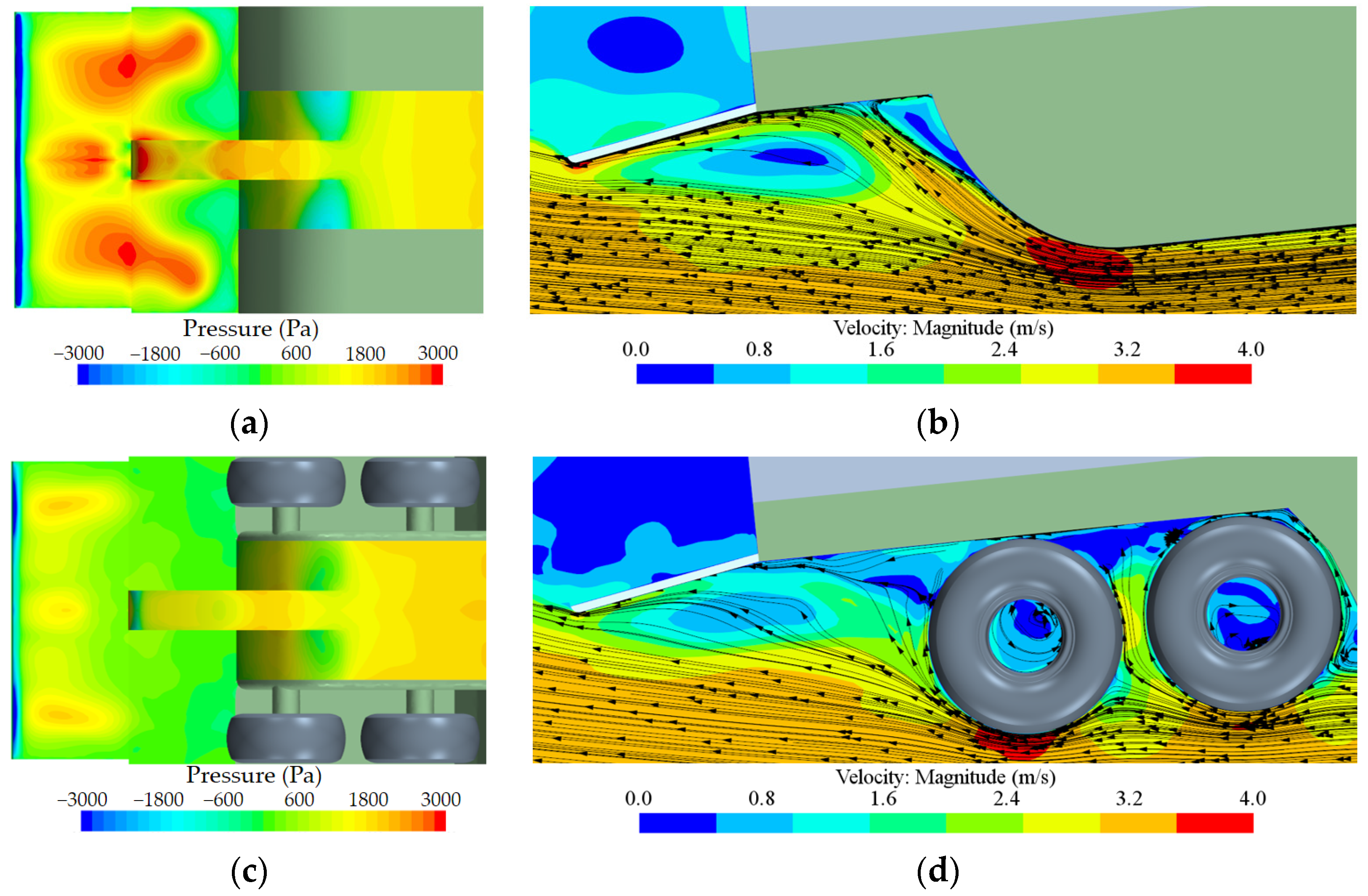
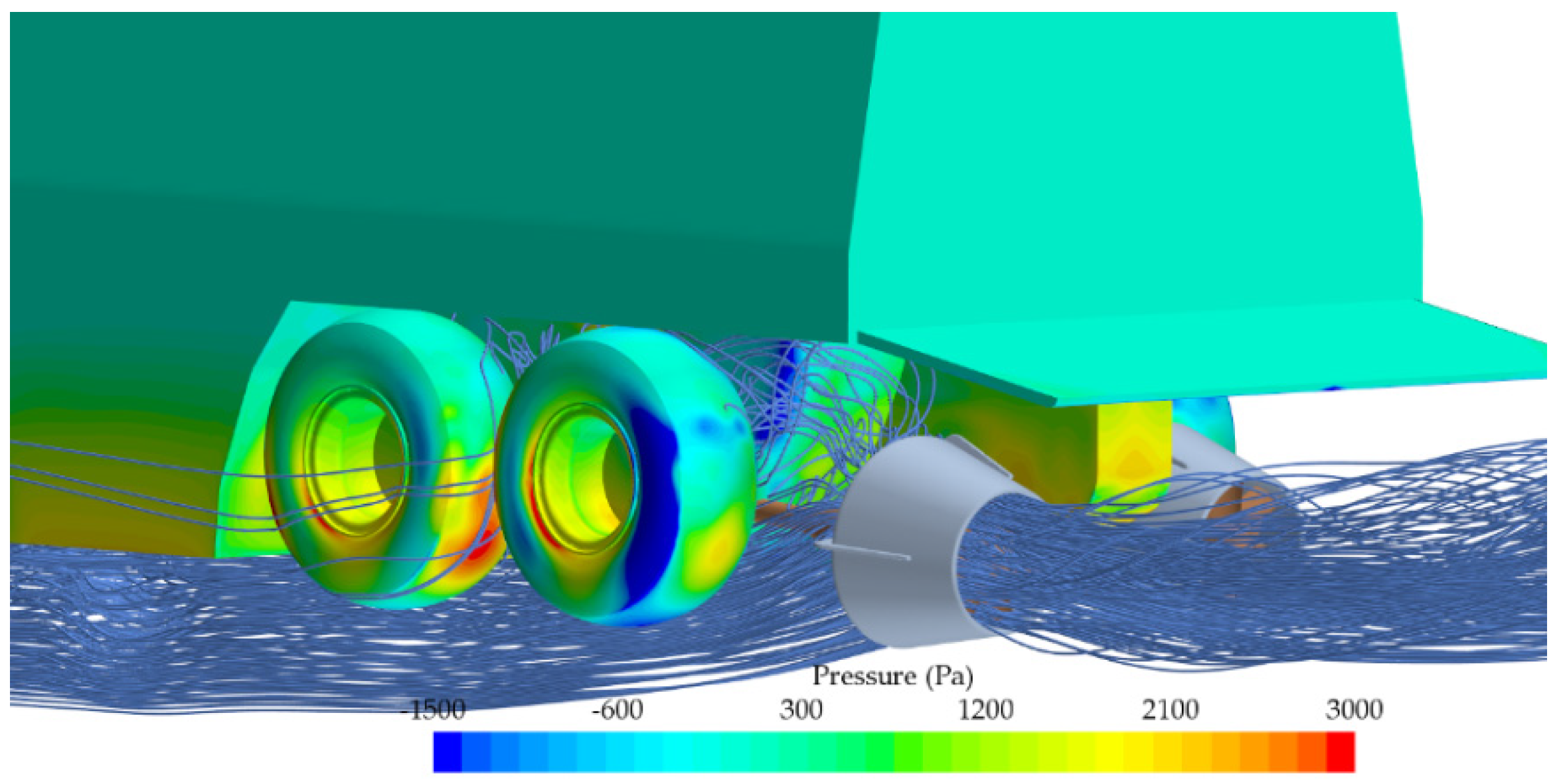
The wheels and wheel wells of the amphibious vehicle in this paper are large in size and many in number, which promotes the formation of convex and concave structures at the bottom of the wheel longitudinal section. These convex and concave structures prevent the flow from passing smoothly along the vehicle bottom, which causes the flow to violently rush the wheels and wheel wells, as shown in
Figure 13.
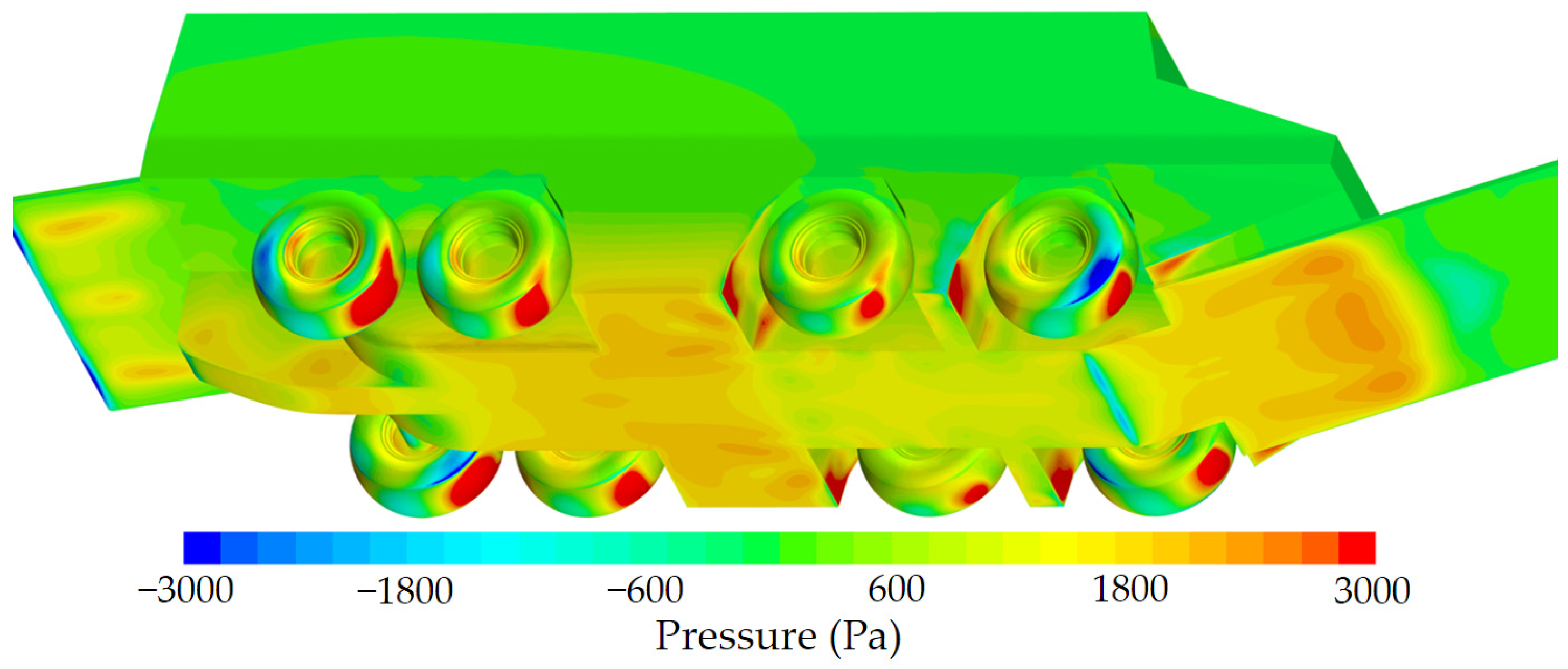
Under the rush of flow, the wheels and wheel wells form a large number of obvious high-pressure areas, which is one of the main reasons for the high resistance of the wheels and wheel wells, as shown in
Figure 14.
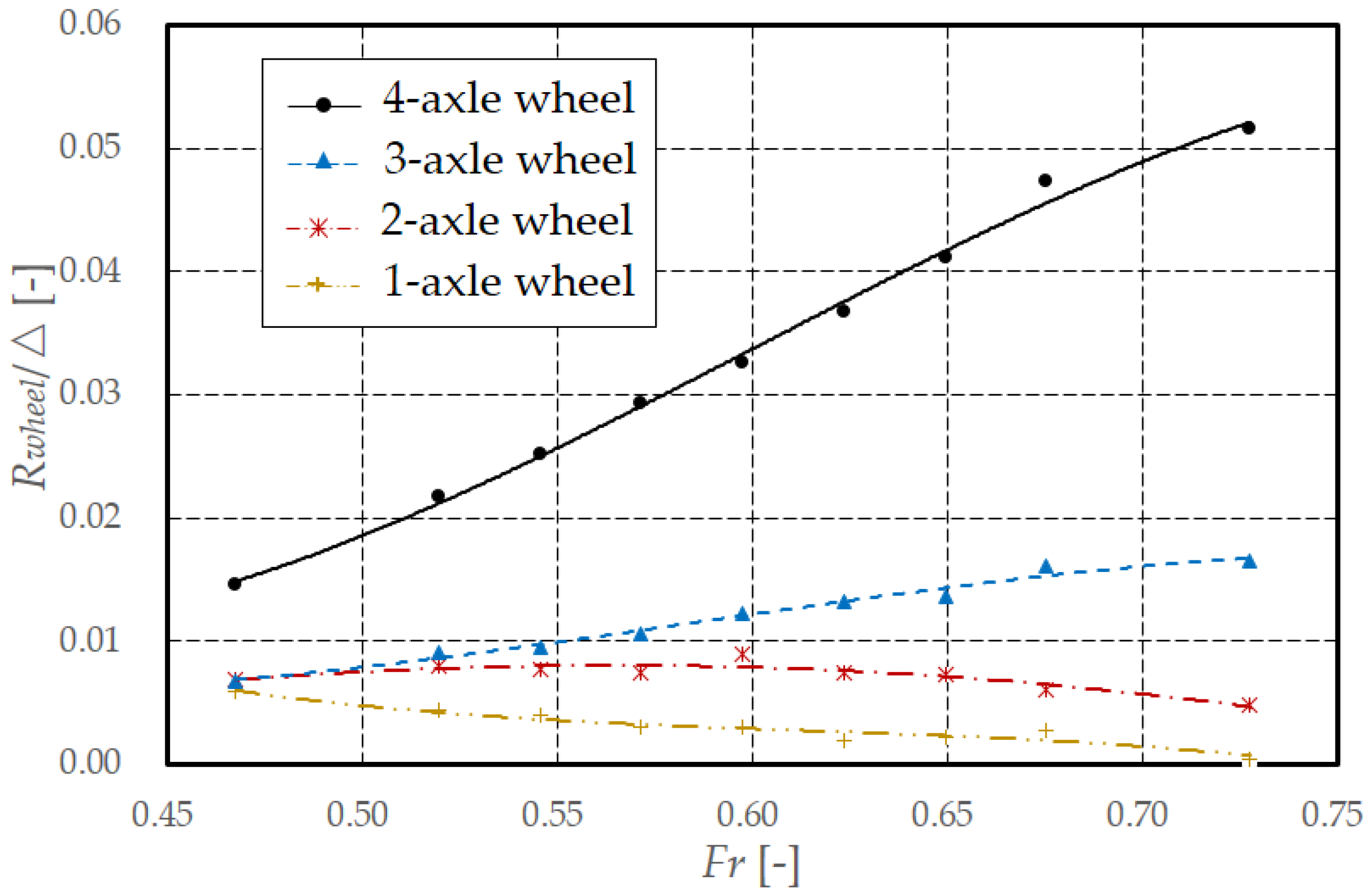
In detail, the front half convex structures of the 1-axle, 2-axle, and 3-axle wheels are rushed by the flow along the vehicle bottom, and thus put under high pressure. The contour of the rear half of the wheels gradually shrinks along the flow direction, forming a relatively obvious diffused concave area, which induces the flow to turn along the wheel contour. For 1-axle and 2-axle wheels, part of the flow after turning rushes to the wheel wells, forming obvious high pressure, and the other part continues to flow to the next axle wheels along the vehicle bottom. For the 3-axle wheels, since there is no vertical pillar between the 3-axle wheels and the 4-axle wheels (refer to
Figure 13), most of the flow after turning rushes the 4-axle wheels. As a result, the 4-axle wheels have a large area of high-pressure region, which causes the resistance of the 4-axle wheels to be much greater than that of the other three axle wheels, as shown in
Figure 15. It can be seen from the above that reducing the high pressure of the wheels and wheel wells may be a very effective resistance improvement approach, especially for 4-axle wheels.
3.1.2. The Geometry Unchanged Parts
The influence of the wheels and wheel wells on the flow field around themselves will also change the forces on the geometry unchanged parts. As shown in
Figure 12, under the local effect of the wheels, the resistance of the bow breakwater and the vehicle body decreased slightly, and the resistance of the stern flap decreased significantly. On the one hand, the installation of wheels decreases the smoothness of the amphibious vehicle, reduces the velocity of the flow field around the vehicle body, and weakens the rush of the flow on the geometry unchanged parts. On the other hand, the flow field will also have special change due to some structural changes, especially in the stern flap. As shown in
Figure 16, there is a beam of high-speed streamlines rushing the stern flap of the NW model. In the TS model, because the wheels change the direction and speed of the stern streamline, there is no streamline that violently rushes the stern flap.
Obviously, the resistance reduction of the vehicle body, the bow breakwater and the stern flap is beneficial to the total resistance of the amphibious vehicle. One of the methods to further improve the resistance of the amphibious vehicle is to propose measures that can increase the magnitude of the resistance reduction. However, this is a very complex problem and difficult to achieve.
3.2. The Global Effect K2
The global effect
K2 accounts for a relatively small proportion of the total effect
K, which is caused by the vehicle attitude variation.
K2 represents the resistance difference between the HW model and the TS model. The attitude of the TS model is constrained to be the same as the NW model, and the attitude difference between the HW model and the TS model is shown in
Figure 9. Under the effect of the wheels, the draft of the amphibious vehicle has been increased by a relatively large margin, and the aft trim is slightly increased.
From the perspective of static lift, when the amphibious vehicle sails in water, the gap between the wheels and the wheel wells is filled by water, and thus the buoyancy of the NW model will be lost, which in turn causes the vehicle body to sink. However, since these four axle wheels are approximately symmetrically distributed in the front and rear of the gravity center, the moment formed by the buoyancy loss relative to the gravity center is very small, and thus the aft trim of the amphibious vehicle has only changed slightly.
The increase in draft and aft trim will increase the vertical projection area of the vehicle body to cut off the flow, which will strengthen the blocking effect of the vehicle body on the flow. Therefore, for the global effect of the wheels, reducing the buoyancy loss between the wheels and the wheel wells is an effective measure to reduce the resistance.
4. Research on the Resistance Improvement of the Amphibious Vehicle
It can be seen from the above analysis that the hydrodynamic effect of the wheels will significantly increase the resistance of the amphibious vehicle. In order to reduce the negative effect of the wheels, one of the most effective measures is to turn the amphibious vehicle model into the NW model of this paper, for example, the wheels are completely retracted and the wheel wells are sealed with flat plates. This measure can completely eliminate the effect of the wheels, but it is difficult to achieve in engineering. Therefore, according to the effect mechanism of the wheels on resistance, this paper proposes the less difficult resistance improvement approaches to be realized in engineering.
4.1. Increasing Wheel Retraction
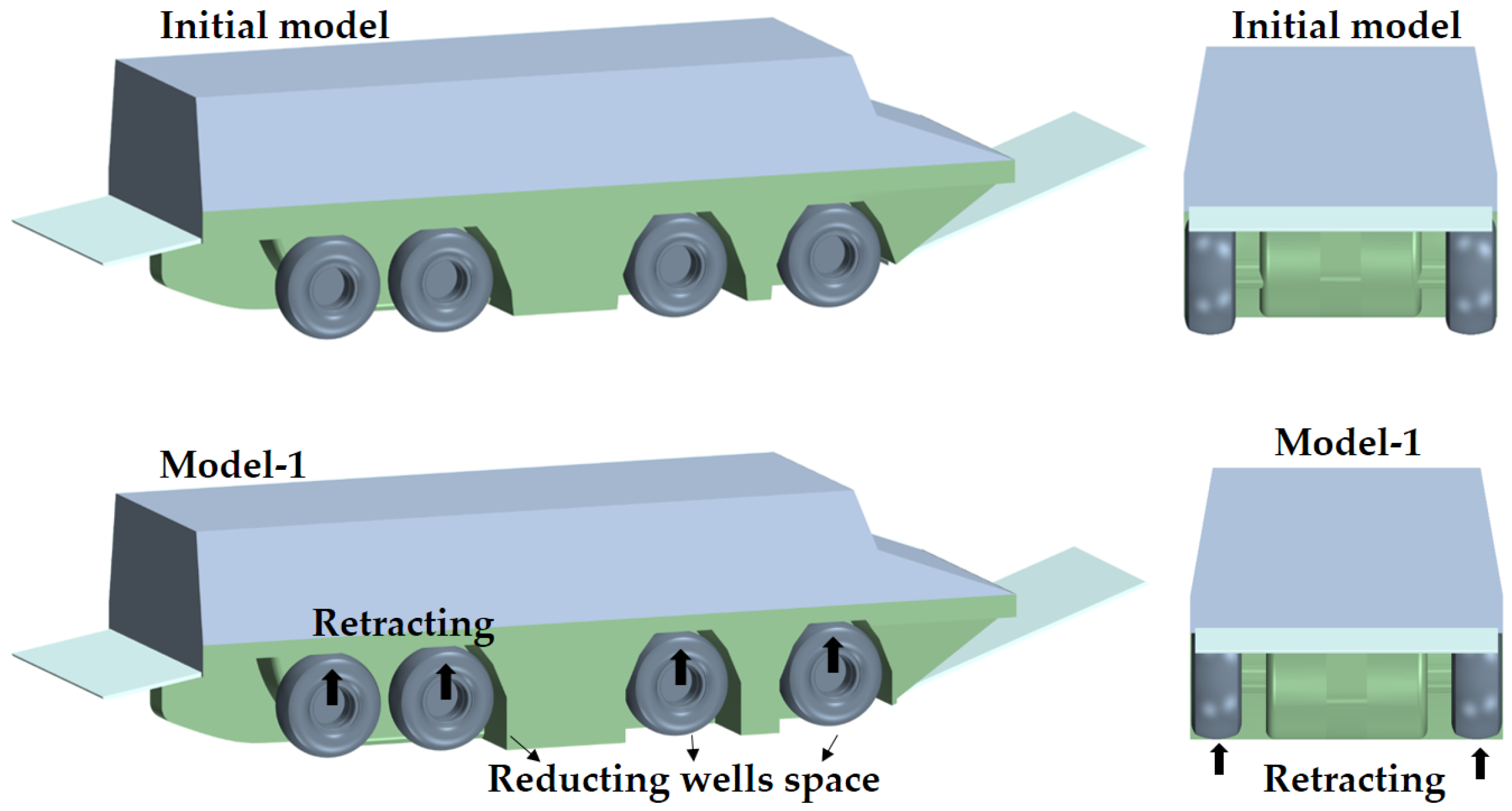
In the local effect of the wheels, the main reason for the resistance increase is that the longitudinal convex and concave structures formed by the wheels and the wheel wells cause an obvious high-pressure area in the wheels and the wheel wells. As for the global effect of the wheels, the main reasons for the resistance increase are: the gap between the wheels and the wheel wells causes a lot of buoyancy loss, which makes the vehicle body sink and aft trim larger, and thus the blocking effect of the amphibious vehicle on flow has also become stronger.
For the local effect of the wheels, the wheels should be retracted until the wheel bottom is flush with the vehicle bottom, which can weaken the convex and concave. As for the global effect of the wheels, the vehicle structure should be made more compact, which can reduce gap and buoyancy loss.
Based on the above analysis, the resistance improvement Model-1 is obtained by increasing wheel retraction and reducing the gap between the wheels and the wheel wells, as shown in
Figure 17. However, because the gap reduction is very small, the resistance improvement is mainly contributed by increasing wheel retraction.
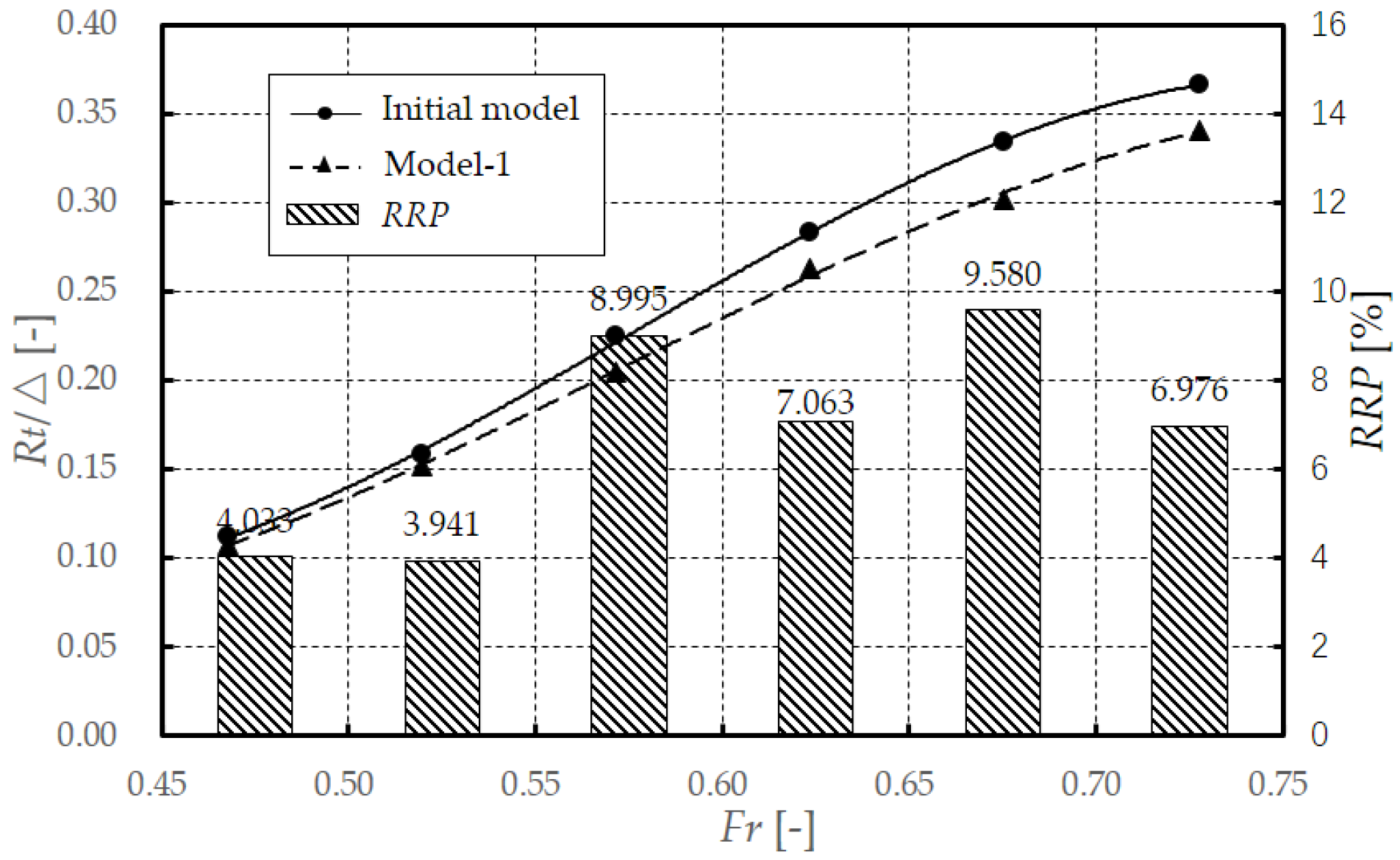
The resistance of the initial model and the Model-1 at various speeds are shown in
Figure 18. The
RRP of
Figure 18 represents the resistance reduction percentage of the Model-1 relative to the initial model. It can be seen from it that, compared with the initial model, the Model-1 has less resistance at each speed. In detail, when 0.468 <
Fr < 0.520, increasing wheel retraction can reduce the resistance by about 4%, and when 0.572 <
Fr < 0.728, the resistance reduction effect is better, which can reach more than 6.9%.
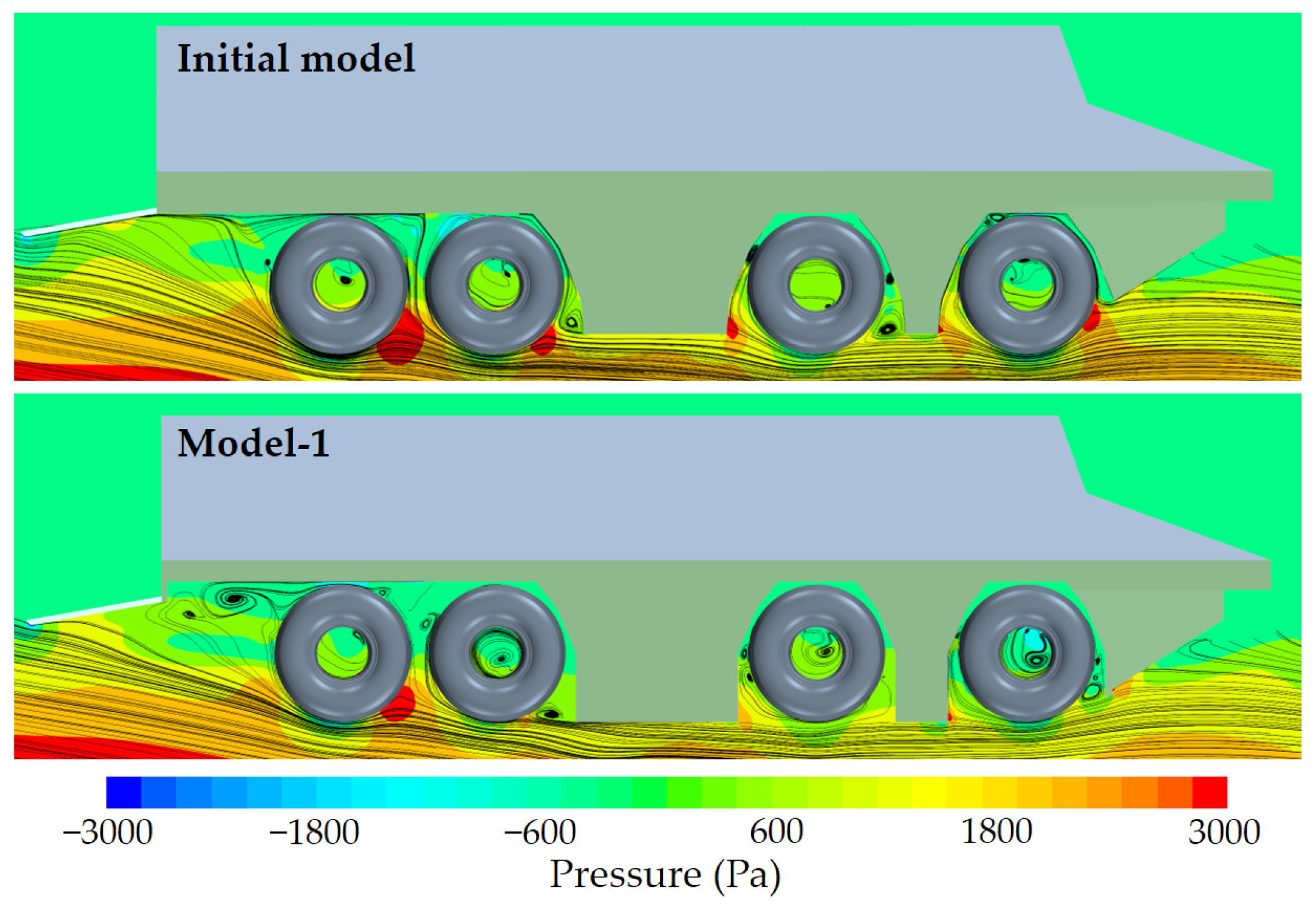
Figure 19 shows the streamline and pressure distribution at the wheel longitudinal section of the initial model and the Model-1, respectively. It can be seen that, after the wheel retraction is increased, the flow at the vehicle bottom can pass through the wheels more smoothly, the pressure in the wheel convex area is significantly reduced, and the pressure in the concave area also decreases slightly.
4.2. Installing Flat Plates on the Wheel Well Bottom
As
Figure 19 shows, after the wheels are completely retracted, the flow in the concave region is still deflected along the wheel contour and continue to rush the next axle wheels and wheel wells, so that some high-pressure areas still exist. In order to reduce the high pressure in the concave region, this paper attempted to install flat plates on the wheel well bottom to improve the flow direction, so as to prevent the flow from hitting the wheel wells or wheels.
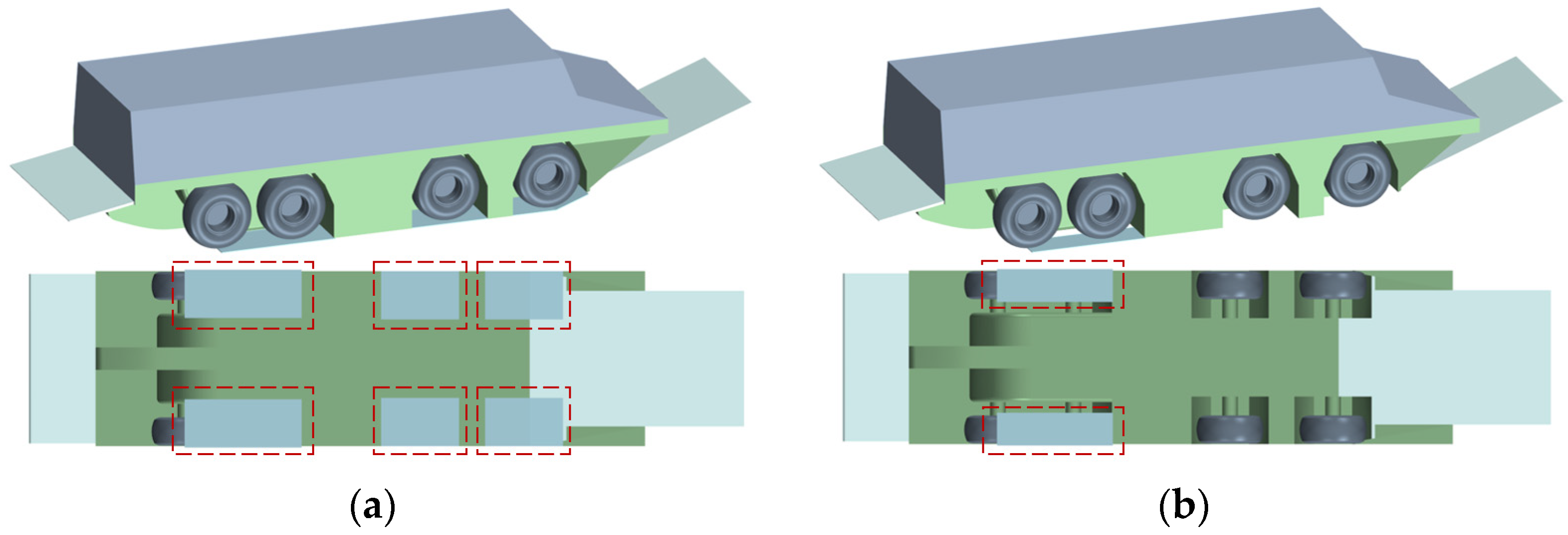
On the basis of the Model-1, this paper proposes two other resistance improvement models by installing flat plates on the wheel well bottom, as shown in
Figure 20. In the resistance improvement Model-2, the bottoms of all wheel wells are completely enclosed with flat plates. The resistance improvement Model-3 is only aimed at the 4-axle wheel wells with the most obvious high pressure, where a small flat plate is installed on the bottom of the 3-axle and 4-axle wheel wells.
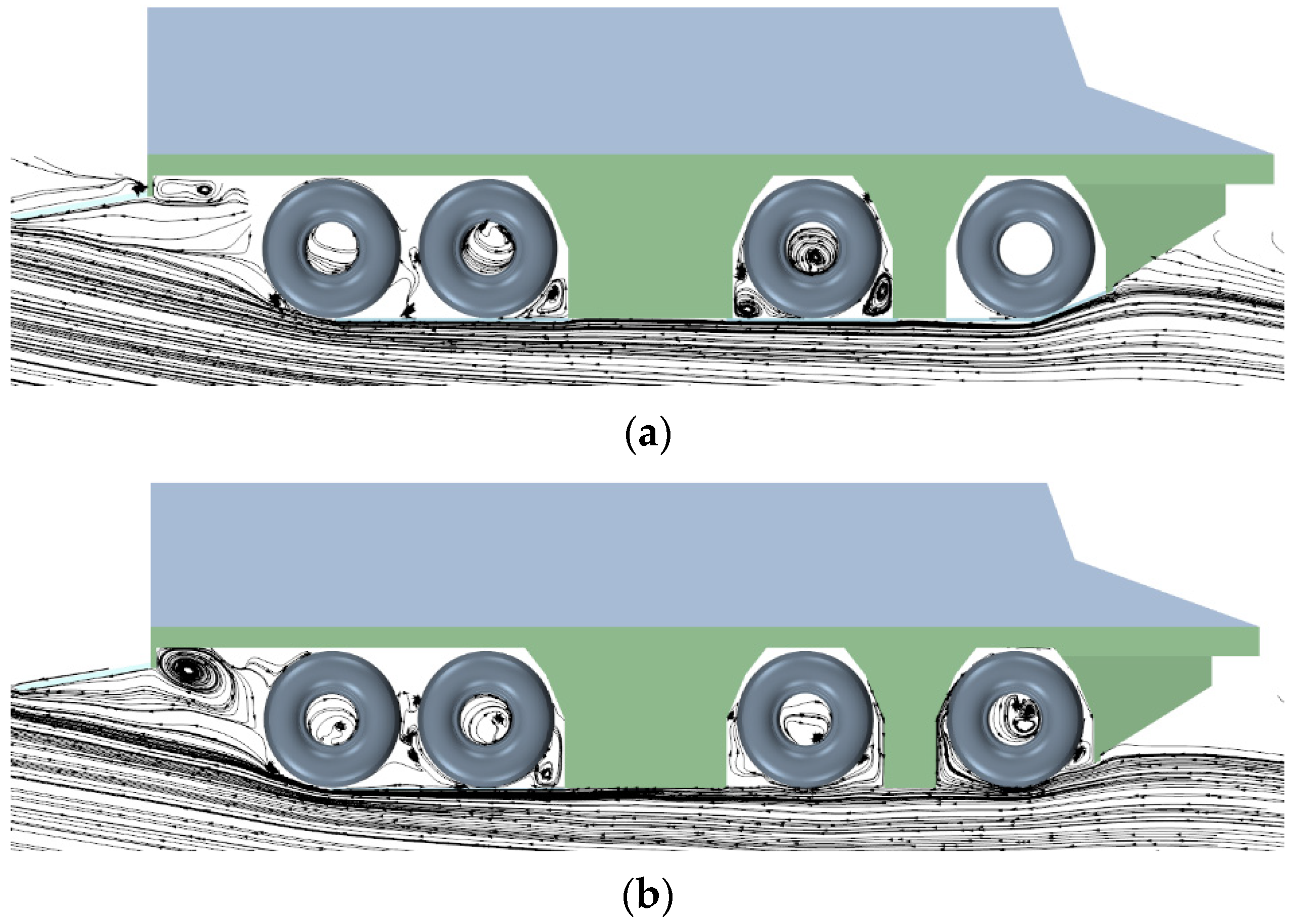
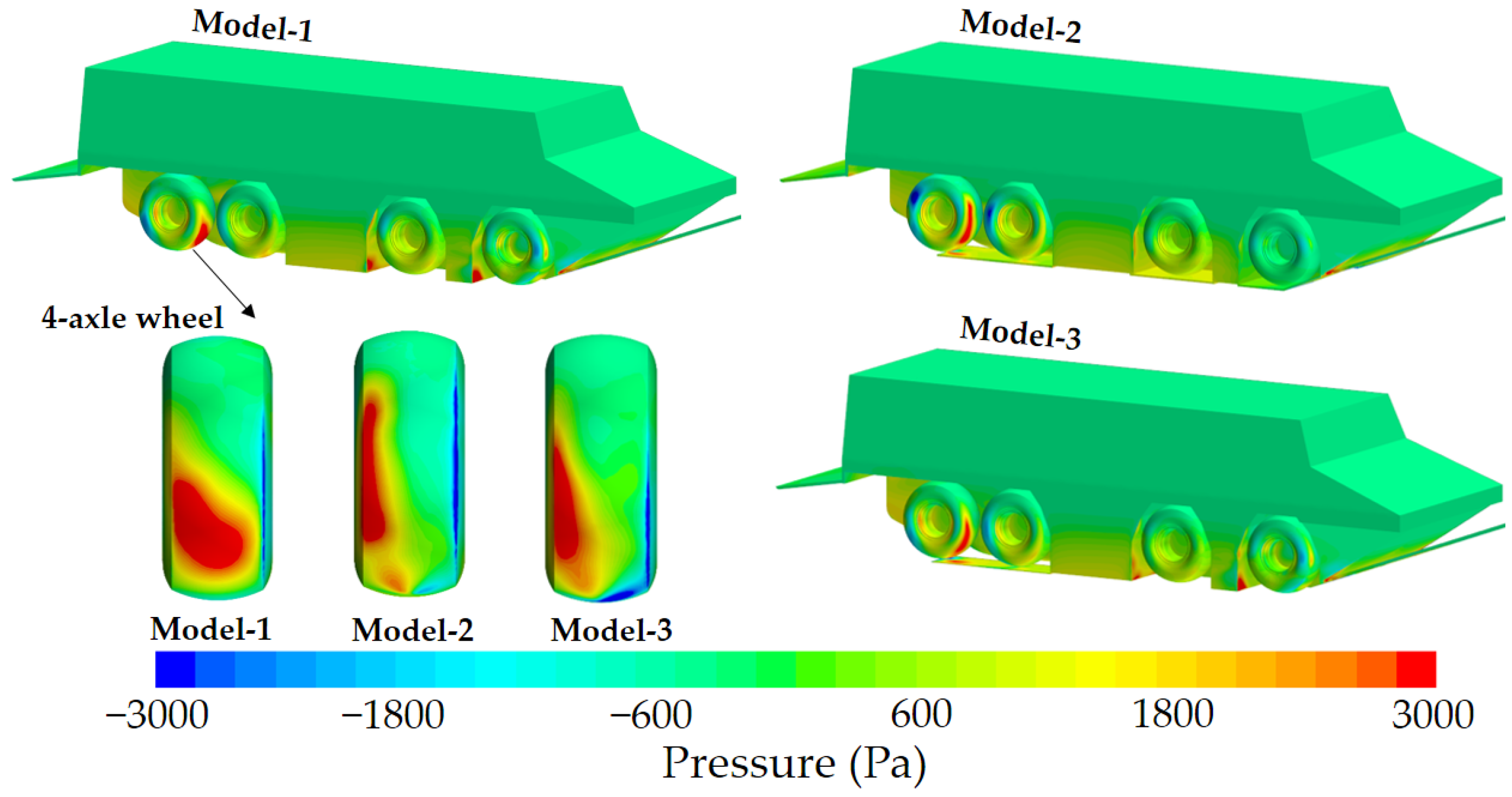
The streamline and pressure distribution of the resistance improvement models are shown in
Figure 21 and
Figure 22, respectively. Installing flat plates on the wheel well bottom allows water to flow more smoothly along the vehicle bottom. In detail, the 1-axle and 2-axle wheel wells can effectively reduce their own high pressure by installing the flat plates on the wheel well bottom, which is beneficial to reduce the resistance of the 1-axle and 2-axle wheel wells. Completely closing the bottom of the 3-axle and 4-axle wheel wells (Model-2), or only installing a small plate on the bottom of the 3-axle and 4-axle wheel wells (Model-3) can both effectively reduce the high pressure at the 4-axle wheels, which can reduce the resistance of the 4-axle wheels by 65.6% or 64.7%, respectively (at
Fr = 0.624)
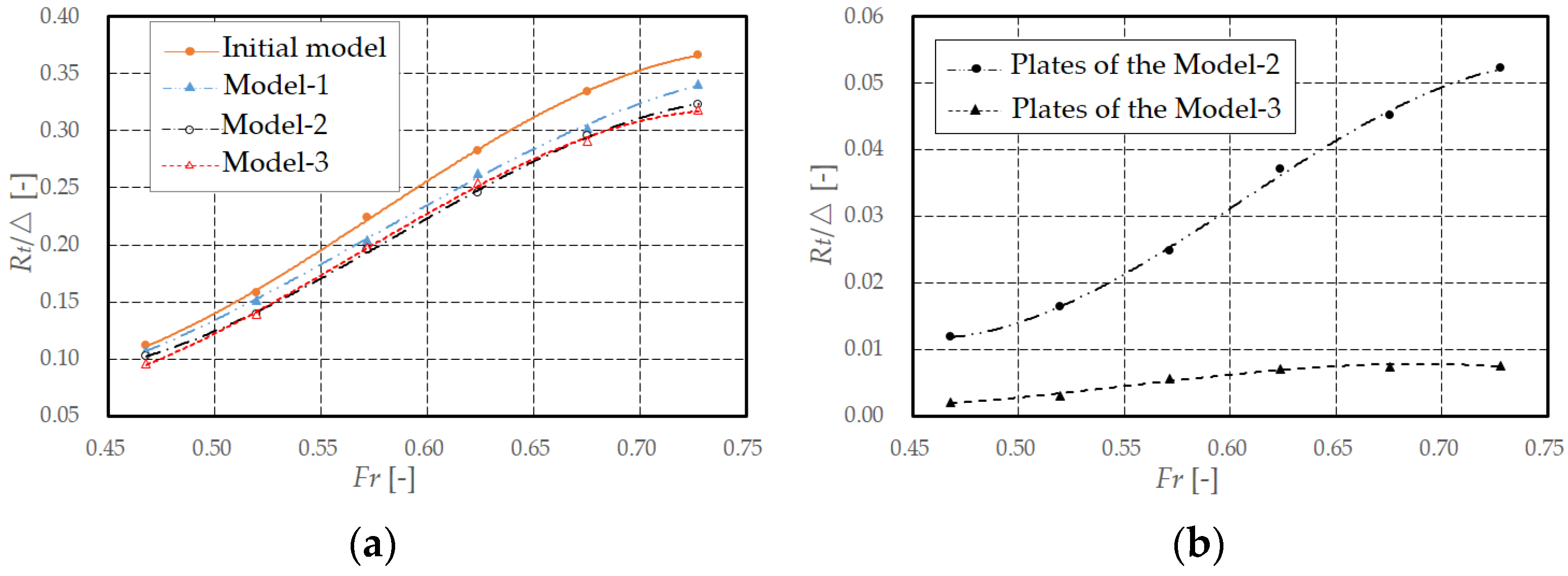
However, while the flat plates improve the resistance of wheels and wheel wells, the flat plates are experiencing resistance. Moreover, the resistance of the flap plates will increase with the plate area increase. The resistance of the resistance improvement models as well as the flap plates are shown in
Figure 23. Although the pressure reduction in Model-2 is more significant than that of Model-3, the overall resistance improvement effect has no obvious advantage due to the greater plate resistance.
From the perspective of the total resistance of the amphibious vehicle, installing flat plates on the concave region of the vehicle bottom does not always have a good resistance improvement effect. In this paper, installing a small plate on the bottom of the 3-axle and 4-axle wheel wheels can significantly reduce the total resistance, but installing the plates on other places had only little effect. Installing the flat plates without resistance improvement effect will increase the manufacturing difficulty in vain. Therefore, before installing the flap plates, the resistance characteristics of the amphibious vehicle and the effect mechanism of the wheels should be analyzed. Furthermore, the resistance improvement, the resistance of the flap plates, and the manufacturing difficulty as well as cost should be comprehensively considered.
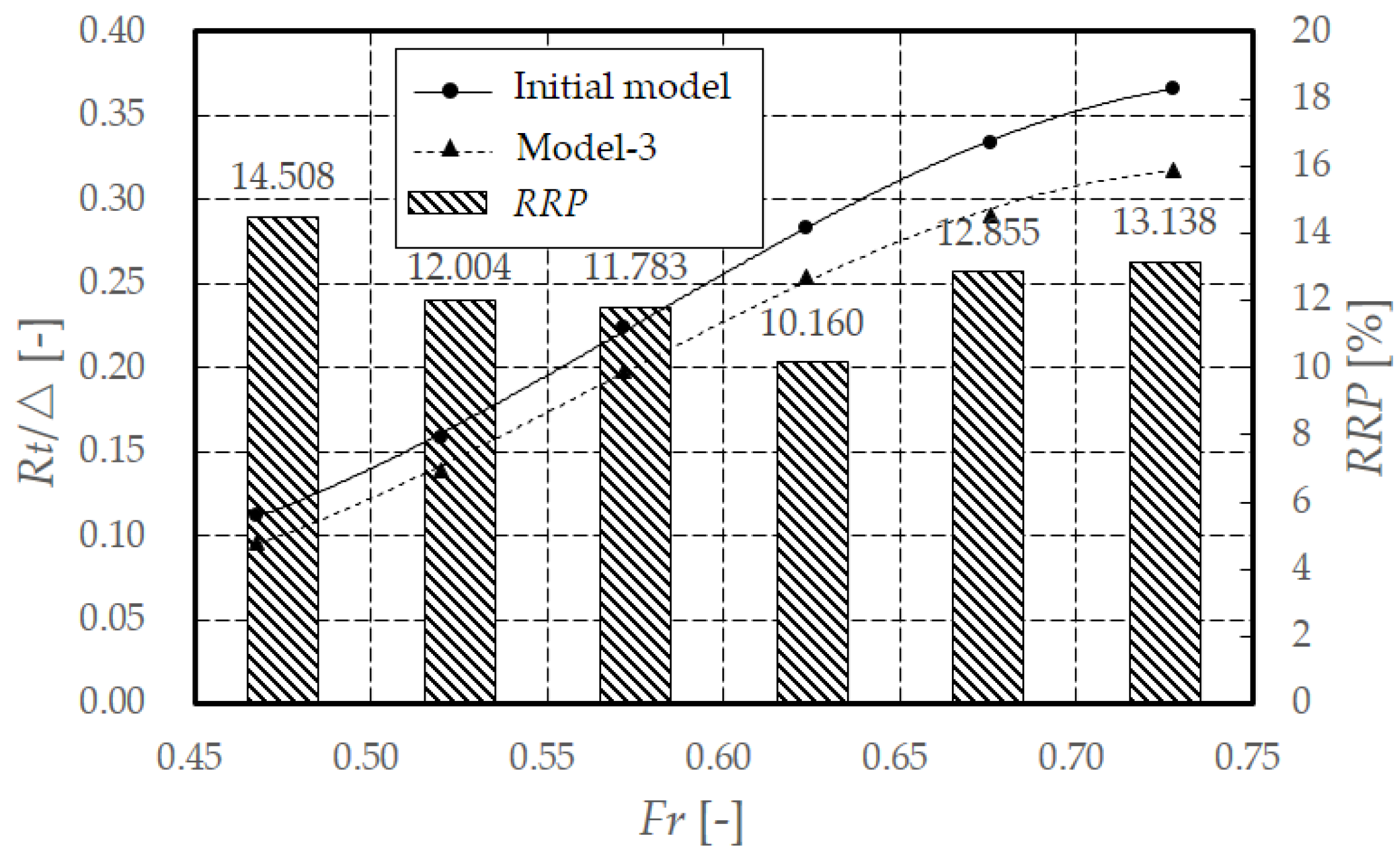
Considering the resistance improvement effect and installation difficulty of the flap plates, the Model-3 was selected as the ultimate resistance improvement model in this paper. The resistance predictions for the Model-3 at other speeds are supplemented, as shown in
Figure 24. The
RRP of
Figure 24 represents the resistance reduction percentage of the Model-3 relative to the initial model. As can be seen, compared to the initial model, the Model-3 reduces resistance by no less than 10% at design speed (
Fr = 0.624) and by an average of no less than 12% at all simulated speeds. In addition, as shown in
Figure 18 and
Figure 24, by comparing the resistance of the Model-2 and the Model-3, it can be found that when 0.468 <
Fr < 0.520, installing a flat plate at the bottom of the 3-axle and 4-axle wheel wells has a good resistance improvement effect, and the resistance reduction can reach 8~10.4%; when 0.572 <
Fr < 0.572, this approach can reduce the resistance by 2.8~6.1%.
5. Self-Propelled Characteristics of the Amphibious Vehicle
In order to explore the improvement effect of the resistance improvement approaches on self-propulsion performance of the amphibious vehicle, this paper numerically simulated the self-propulsion performance of the initial model and Model-3 under the design speed (
Fr = 0.624). The characteristics of the amphibious vehicle sailing at
Fr = 0.624 are shown in
Table 5.
As can be seen from
Table 5, the rotational speed
n and the self-propelled resistance
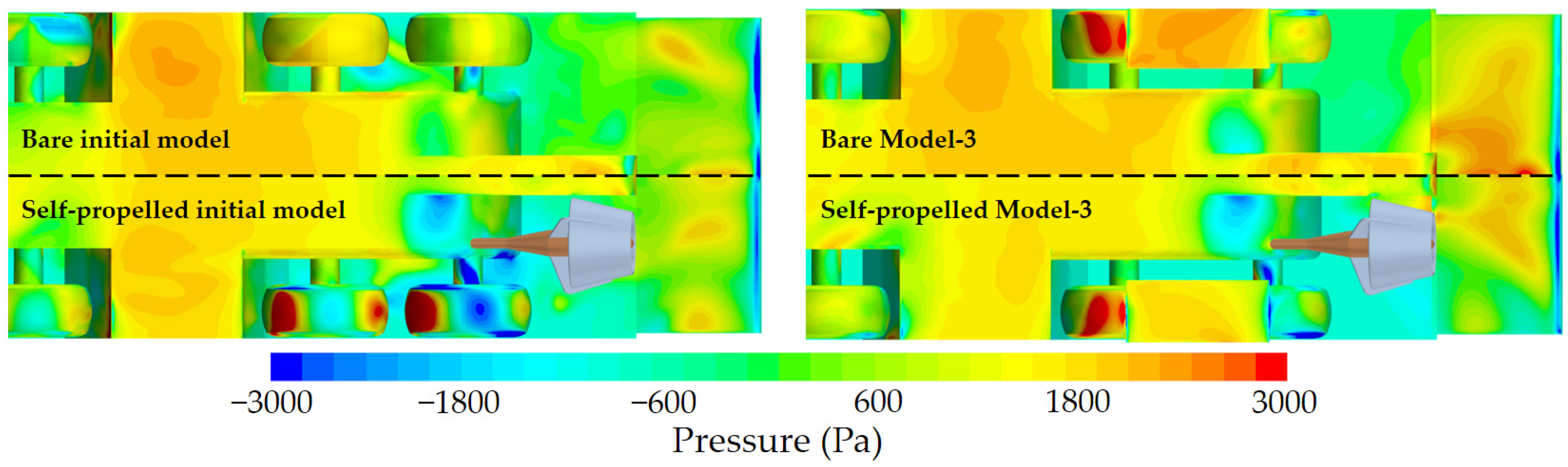
Rself of the pump-jets of the Model-3 relative to the initial model decreased by 1.741%, and 12.325%, respectively. In addition, it is very important that the Model-3 saves 8.564% of the power compared to the initial model at the design speed. This means that the self-propulsion performance of the amphibious vehicle has been significantly improved. There are two main reasons why the Model-3 requires less power. The first reason is that the Model-3 has less resistance on the bare vehicle. Moreover, for the self-propelled vehicle, due to the stern limited space, the suction flow of the pump-jet is very close to the stern ve-hicle body, as shown in
Figure 25.
The pressure of the vehicle stern drops significantly under the suction of the pump-jet, which increases the resistance of the amphibious vehicle, as shown in
Figure 26. Because the rotating speed of the Model-3 propeller is relatively smaller, its pressure reduction of the vehicle stern is smaller in the self-propelled state. Therefore, the second reason is that the Model-3 requires less rotating speed, which results in a smaller re-sistance increase caused by the pump-jets.
The propulsion efficiency η of the Model-3 is slightly reduced relative to the initial model, mainly because the power consumed by the pump-jets is much reduced. However, the propulsion efficiency of the pump-jets is still much higher than conventional stern plate type waterjets. From the above analysis, it can be seen that the resistance improve-ment approaches proposed in this paper have a good resistance and propulsion perfor-mance improvement effect.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}