
Maximum Power Control Algorithm for Power Take-Off System Based on Hydraulic System for Floating Wave Energy Converters


Abstract
:1. Introduction
2. PTO System Configuration and Modeling
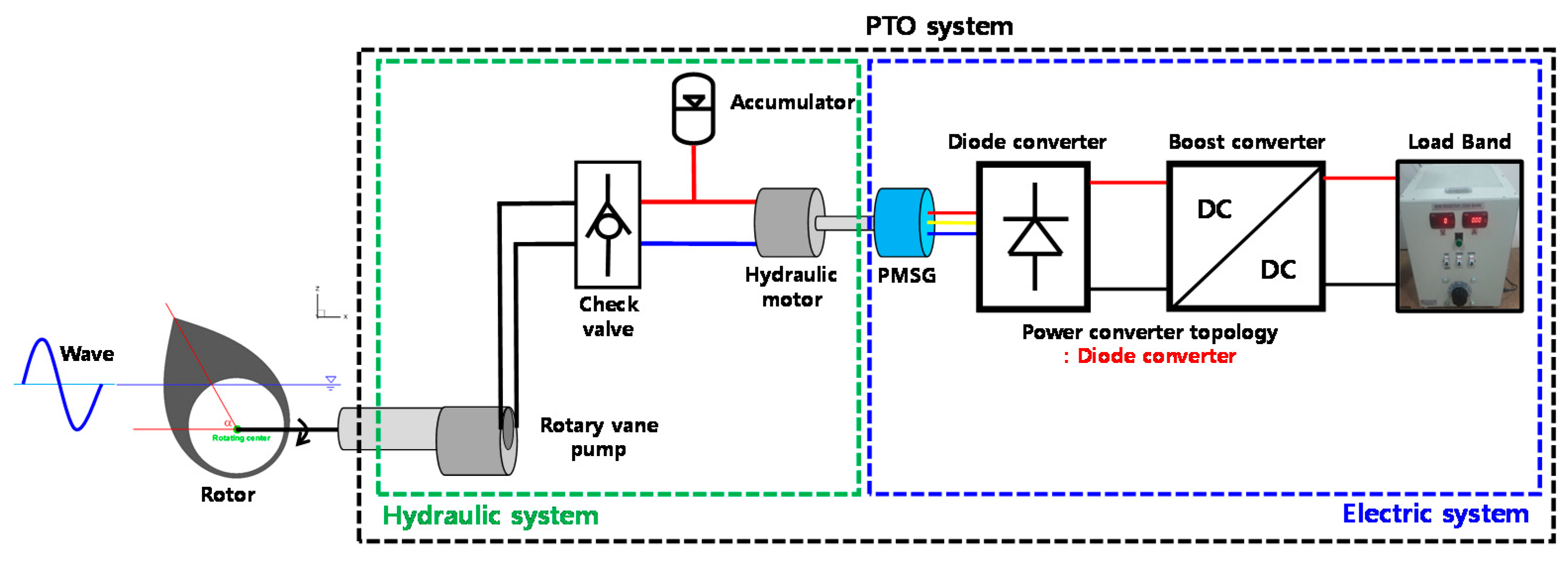
2.1. FWEC Power Conversion Chain
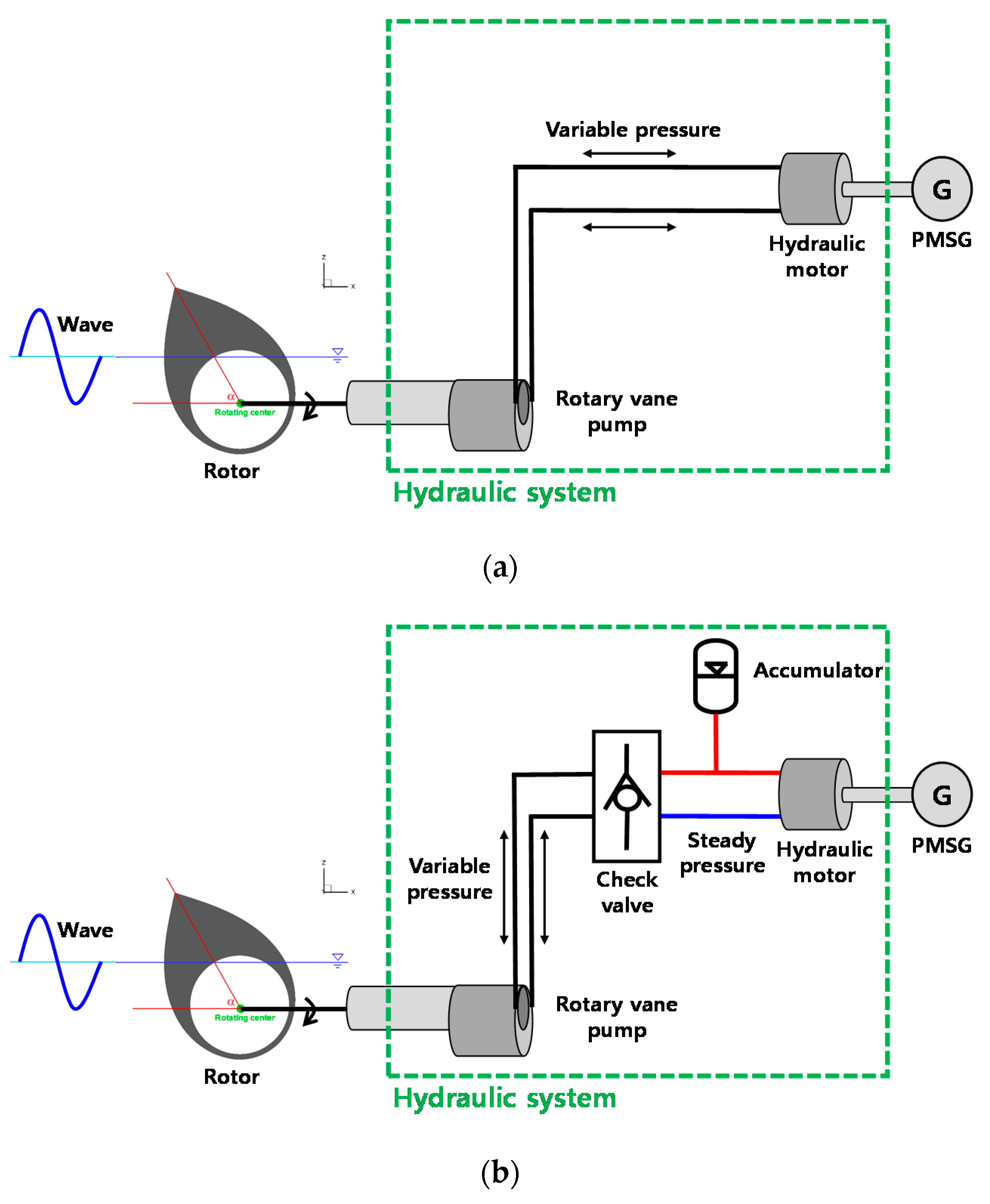
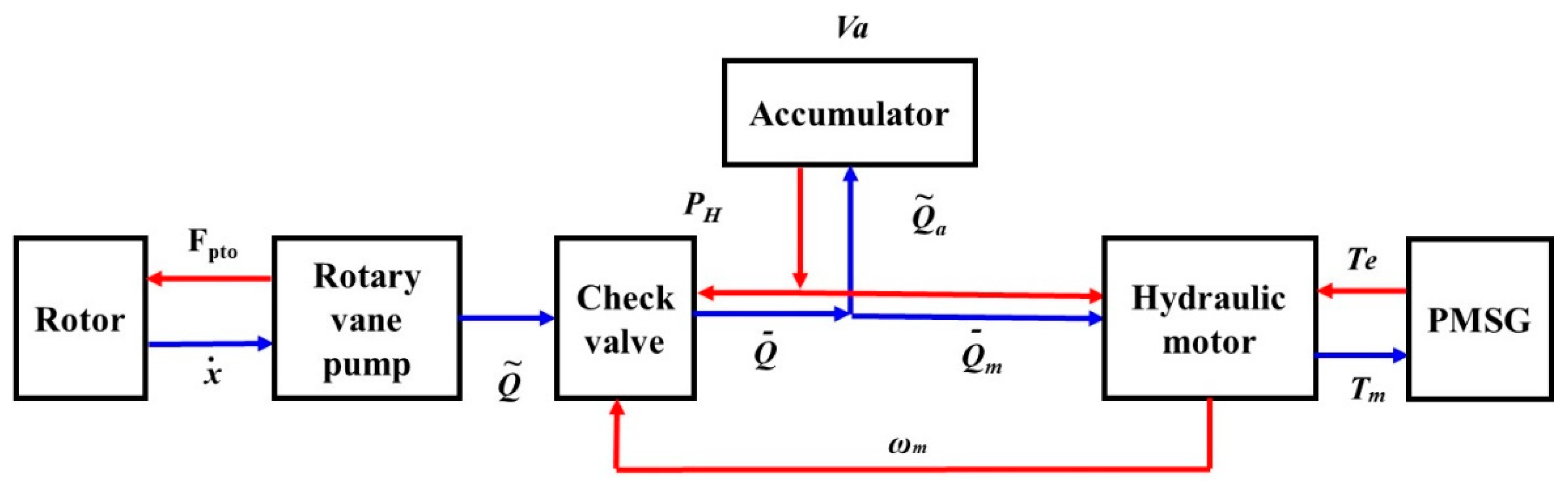
2.2. Hydraulic System Modeling
2.3. Permanent Magnet Synchronous Generator (PMSG) Modeling
2.4. Power Converter Configuration and Modeling
3. Load Control Algorithm for Maximum Power Control of FWEC
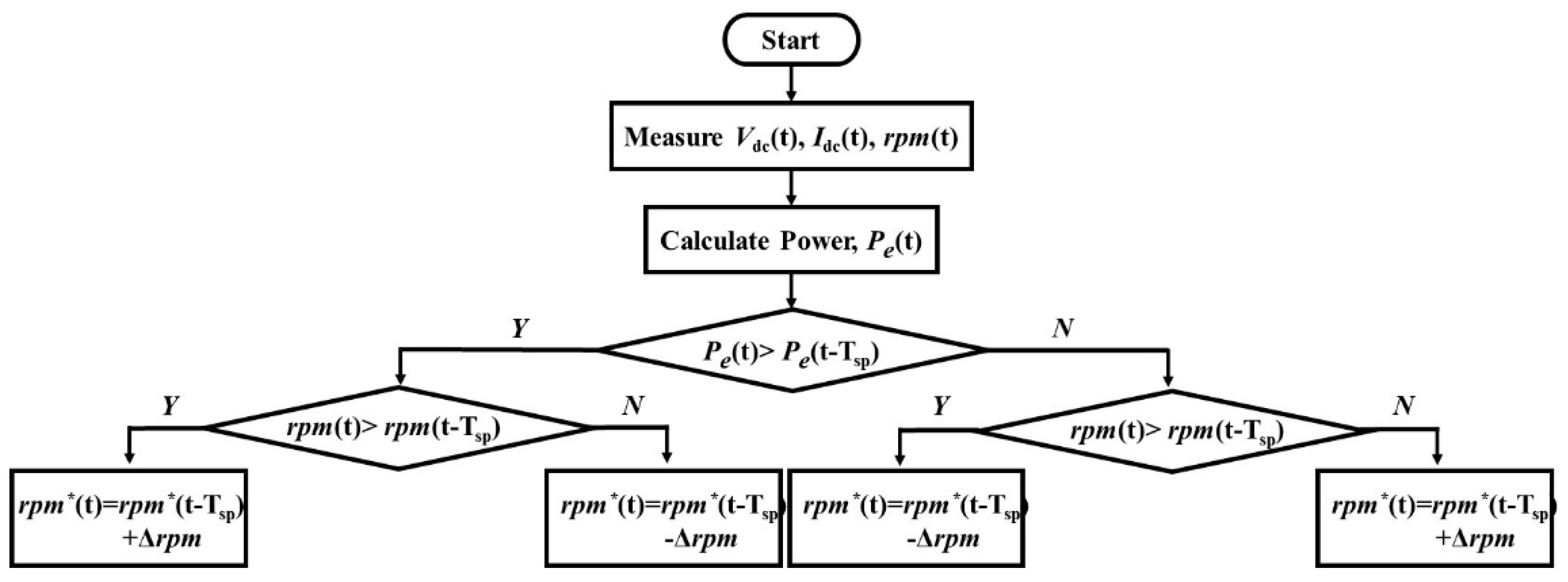
3.1. Speed Control Algorithm-Based P&O Algorithm
3.2. Optimal Torque Control Algorithm
4. Results
4.1. Simulation Results Obtained under Regular Wave Conditions
4.2. Simulation Results Obtained under Irregular Wave Conditions
5. Comparison of Real Sea Test and Simulation
5.1. Comparison of P&O Algorithm-Based Speed Control Algorithm
5.2. Comparison of Torque Control Algorithm
6. Conclusions
Funding
Conflicts of Interest
Abbreviations
| Pitch angular velocity of floating body | |
| Pitch angle of the floating body | |
| Rotary vane pump flow | |
| Rotary vane pump displacement | |
| FTO force on floating body | |
| Force of the FTO to obtain the maximum power generation | |
| High pressure in hydraulic piping | |
| Low pressure in hydraulic piping | |
| Flow of check valve | |
| Accumulator flow | |
| Hydraulic motor flow | |
| Accumulator volume | |
| Initial high pressure of hydraulic pipe | |
| Accumulator initial volume | |
| Accumulator specific weight | |
| Hydraulic motor displacement | |
| Mechanical torque | |
| Electrical torque | |
| Hydraulic motor angular speed | |
| D-Q axis inductance of generator | |
| Electrical angular frequency | |
| D-Q axis generator current | |
| D-Q axis generator voltage | |
| Generator flux linkage | |
| Generator armature resistance | |
| Electrical power | |
| Number of generator poles | |
| DC/DC Converter duty ratio | |
| DC/DC Converter controlled sampling | |
| Period of input wave energy | |
| Resonance period of input wave energy | |
| Power take-off damping factor | |
| Input absorption power | |
| Mechanical power | |
| Torque damping factor |
References
- Noble, D.R.; O’Shea, M.; Judge, F.; Robles, E.; Martinez, R.; Khalid, F.; Thies, P.R.; Johanning, L.; Corlay, Y.; Gabl, R.; et al. Standardising Marine Renewable Energy Testing: Gap Analysis and Recommendations for Development of Standards. J. Mar. Sci. Eng. 2021, 9, 971. [Google Scholar] [CrossRef]
- Davey, T.; Sarmiento, J.; Ohana, J.; Thiebaut, F.; Haquin, S.; Weber, M.; Gueydon, S.; Judge, F.; Lyden, E.; O’Shea, M.; et al. Round Robin Testing: Exploring Experimental Uncertainties through a Multifacility Comparison of a Hinged Raft Wave Energy Converter. J. Mar. Sci. Eng. 2021, 9, 946. [Google Scholar] [CrossRef]
- Xu, R.; Wang, H.; Xi, Z.; Wang, W.; Xu, M. Recent Progress on Wave Energy Marine Buoys. J. Mar. Sci. Eng. 2022, 10, 566. [Google Scholar] [CrossRef]
- Martins, J.C.; Fragassa, C.; Goulart, M.M.; dos Santos, E.D.; Isoldi, L.A.; Gomes, M.D.N.; Rocha, L.A.O. Constructal Design of an Overtopping Wave Energy Converter Incorporated in a Breakwater. J. Mar. Sci. Eng. 2022, 10, 471. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. Proc. Inst. Mech. Eng. A 2009, 223, 887–902. [Google Scholar] [CrossRef] [Green Version]
- Cruz, J. Ocean Wave Energy—Current Status and Future Perspectives; Springer: Berlin, Germany, 2008; p. 434. [Google Scholar]
- Salter, S.H.; Taylor, J.R.M.; Caldwell, N.J. Power conversion mechanisms for wave energy. Proc. Inst. Mech. Eng. M 2002, 216, 1–27. [Google Scholar] [CrossRef]
- Rico, H.H.; Morten, M.K.; Enrique, V. Discrete displacement hydraulic power take-off system for the Wavestar wave energy converter. Energies 2013, 6, 4001–4044. [Google Scholar]
- Markel, P.; John, V.R. A review of wave-to-wire models for wave energy converters. Energies 2016, 9, 506. [Google Scholar]
- Mueller, M.; Baker, N. Direct Drive Wave Energy Converters. Available online: http://www.cder.dz/download/upec-1.pdf (accessed on 23 July 2013).
- Polinder, H.; Mueller, M.; Scuotto, M.; Prado, M. Linear generator systems for wave energy conversion. In Proceedings of the 7th European Wave and Tidal Energy Conference, Porto, Portugal, 11–14 September 2007. [Google Scholar]
- Li, B.; Macpherson, D.E.; Shek, J.K.H. Direct drive wave energy converter control in irregular waves. In Proceedings of the IET Conference on Renewable Power Generation (RPG 2011) IET, Edinburgh, UK, 6–8 September 2011; p. 64. [Google Scholar]
- Poullikkas, A. Technology Prospects of Wave Power Systems. Electron. J. Energy Environ. 2014, 2, 47–69. [Google Scholar]
- Arof, H.; Nor, W.; Nor, K.M. Linear generator: Design and simulation. In Proceedings of the National Power Engineering Conference IEEE, Bangi, Malaysia, 15–16 December 2003; pp. 306–311. [Google Scholar]
- Hansen, R.; Andersen, T.; Pedersen, H. Model based design of efficient power take-off systems for wave energy converters. In Proceedings of the 12th Scandinavian International Conference on Fluid Power (SICFP 2011), Tampere, Finland, 18–20 May 2011; Volume 2, pp. 35–49. [Google Scholar]
- António, F.D.O. Modeling and control of oscillating-body wave energy converters with hydraulic power take-off and gas accumulator. Ocean Eng. 2007, 34, 2021–2032. [Google Scholar]
- Babarit, A.; Guglielmi, M.; Clément, A.H. Declutching control of a wave energy converter. Ocean Eng. 2009, 36, 1015–1024. [Google Scholar] [CrossRef] [Green Version]
- Hansen, R.; Andersen, T.; Pedersen, H. Comparison of reactive and non-reactive control strategies for wave energy converters with non-ideal power take-off systems. Renew. Energy 2013. submitted for publication. [Google Scholar]
- Skinner, N. Wave Energy Converter Device. European Patent EP2284386A2, 16 February 2011. [Google Scholar]
- Linjama, M.; Vihtanen, H.P.; Sipola, A.; Vilenius, M. Secondary controlled multi-chamber hydraulic cylinder. In Proceedings of the 11th Scandinavian International Conference on Fluid Power (SICFP09), Linkoeping, Sweden, 2–4 June 2009. [Google Scholar]
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Yemm, R.; Pizer, D.; Retzler, C.; Henderson, R. Pelamis: Experience from concept to connection. Phil. Trans. R Soc. A 2012, 370, 365–380. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Joseba, L.A.; Carlos, A.U.J.; Jose, E.A.F. Power Take-Off Device for Wave Energy Transformation. European Patent EP2466118A1, 20 June 2012. [Google Scholar]
- Lasa, J.; Antolin, J.C.; Angulo, C.; Estensoro, P.; Santos, M.; Ricci, P. Design, construction and testing of a hydraulic power take-off for wave energy converters. Energies 2012, 5, 2030–2052. [Google Scholar] [CrossRef] [Green Version]
- Hansen, R.; Andersen, T.; Pedersen, H. Determining required valve performance for discrete control of PTO cylinders for wave energy. In Proceedings of the ASME Symposium on Fluid Power and Motion Control (FPMC 2012), Bath, UK, 12–14 September 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; pp. 565–578. [Google Scholar]
- Ratanak, S.; Sean, C.; Sam, K.; Asher, S.; Ted, K.A. PTO-Sim: Development of a power take off modeling tool for ocean wave energy conversion. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting (IEEE-PES 2015), Denver, CO, USA, 26–30 July 2015. [Google Scholar]
- Ratanaks, S.; Asher, S.; Ted, B.; Kelley, R.; Carlos, M. Development of PTO-SIM: A power performance module for the open-source wave energy converter code WEC-SIM. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering (OMAE2015), St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Abdelsalam, K.; Massoud, A.M.; Ahmed, S.; Enjeti, P.N. High-performance adaptive perturb and observe MPPT technique for photovoltaic based microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Xu, J.; Yang, Y.; Hu, Y.; Xu, T.; Zhan, Y. MPPT Control of Hydraulic Power Take-Off for Wave Energy Converter on Artificial Breakwater. J. Mar. Sci. Eng. 2020, 8, 304. [Google Scholar] [CrossRef]
- Amon, E.A.; Brekken, T.K.A.; Schacher, A.A. Maximum Power Point Tracking for Ocean Wave Energy Conversion. IEEE Trans. Ind. Appl. 2012, 48, 1079–1086. [Google Scholar] [CrossRef]
- Hardy, P.; Cazzolato, B.S.; Ding, B.; Prime, Z. A maximum capture width tracking controller for ocean wave energy converters in irregular waves. Ocean Eng. 2016, 121, 516–529. [Google Scholar] [CrossRef]
- Mendes, R.; Calado, M.D.R.; Mariano, S.J.P.S. Maximum Power Point Tracking for a Point Absorber Device with a Tubular Linear Switched Reluctance Generator. Energies 2018, 11, 2192. [Google Scholar] [CrossRef] [Green Version]
- Ding, B.; Cazzolato, B.S.; Arjomandi, M.; Hardy, P.; Mills, B. Sea-state based maximum power point tracking damping control of a fully submerged oscillating buoy. Ocean Eng. 2016, 126, 299–312. [Google Scholar] [CrossRef]
- Li, W.; Chau, K.T.; Hua, F.; Ching, T.W. Maximum power point tracking control of a linear magnetic-geared generator for direct-drive wave energy conversion. In Proceedings of the 10th International Conference on Advances in Power System Control, Operation & Management (APSCOM 2015), Hong Kong, China, 8–12 November 2015; pp. 1–6. [Google Scholar]
- Salter, S.H.; Jeffrey, D.C.; Taylor, J.R.M. The Architecture of Nodding Duck Wave Power Generators. 1976. Available online: https://hdl.handle.net/1842/37407 (accessed on 21 March 2022).
- Ha, Y.J.; Park, J.Y.; Shin, S.H. Numerical Study of Non-Linear Dynamic Behavior of an Asymmetric Rotor for Wave Energy Converter in Regular Waves. Processes 2021, 9, 1477. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case (rpm) | Absorbed Power (kWh) | Output Power (kWh) | Efficiency (%) |
|---|---|---|---|
| 300 | 5.45 | 5.09 | 92.99 |
| 350 | 5.33 | 5.22 | 97.94 |
| 400 | 5.45 | 5.35 | 98.12 |
| 500 | 4.11 | 3.75 | 91.22 |
| Case (k) | Absorbed Power [kWh] | Output Power (kWh) | Efficiency (%) |
|---|---|---|---|
| 0.4 | 4.74 | 4.53 | 95.5 |
| 0.8 | 5.38 | 5.14 | 95.5 |
| 1.6 | 5.59 | 5.35 | 95.7 |
| 2.4 | 5.51 | 5.34 | 96.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roh, C. Maximum Power Control Algorithm for Power Take-Off System Based on Hydraulic System for Floating Wave Energy Converters. J. Mar. Sci. Eng. 2022, 10, 603. https://doi.org/10.3390/jmse10050603
Roh C. Maximum Power Control Algorithm for Power Take-Off System Based on Hydraulic System for Floating Wave Energy Converters. Journal of Marine Science and Engineering. 2022; 10(5):603. https://doi.org/10.3390/jmse10050603
Chicago/Turabian StyleRoh, Chan. 2022. "Maximum Power Control Algorithm for Power Take-Off System Based on Hydraulic System for Floating Wave Energy Converters" Journal of Marine Science and Engineering 10, no. 5: 603. https://doi.org/10.3390/jmse10050603
APA StyleRoh, C. (2022). Maximum Power Control Algorithm for Power Take-Off System Based on Hydraulic System for Floating Wave Energy Converters. Journal of Marine Science and Engineering, 10(5), 603. https://doi.org/10.3390/jmse10050603