



DMSF-YOLO: A Dynamic Multi-Scale Fusion Method for Maize Tassel Detection in UAV Low-Altitude Remote Sensing Images



Abstract
1. Introduction
- (1)
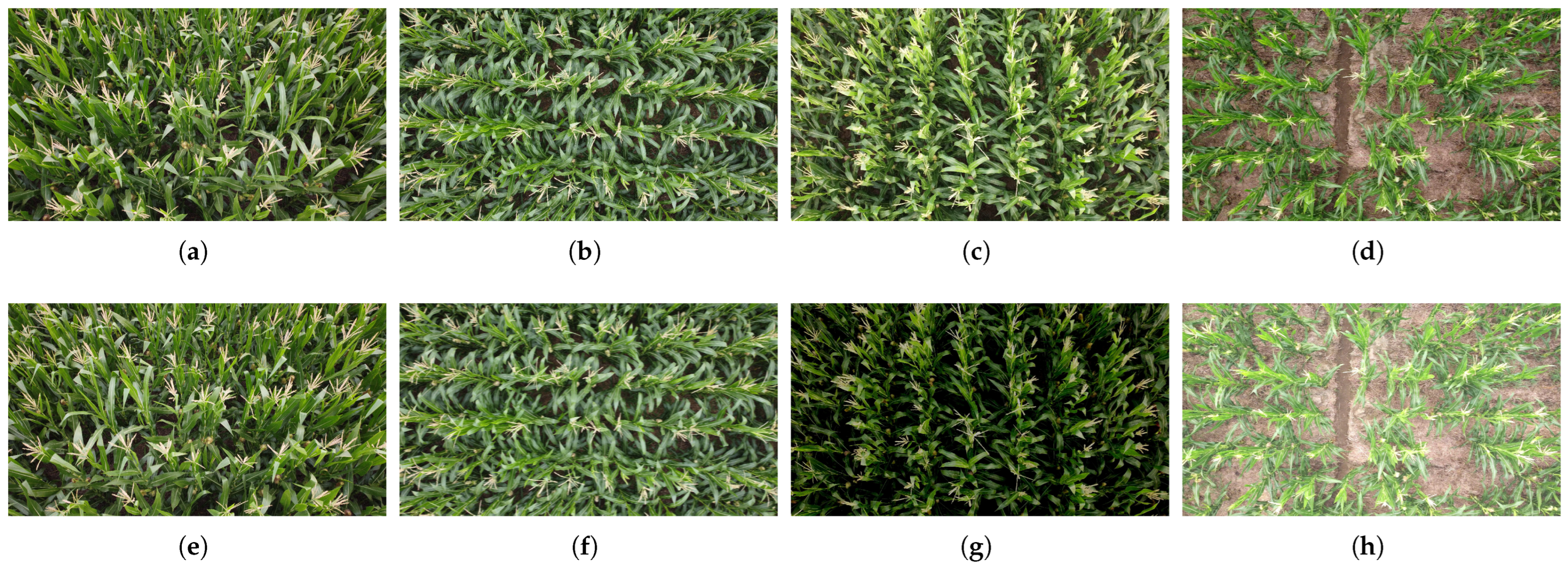
- The paper constructs a multi-scale maize tassel dataset based on UAV low-altitude imagery. The dataset consists of 1806 images captured at different altitudes (3 m, 4 m, and 5 m) and angles (inclined and vertical views). It encompasses maize tassel characteristics under various lighting conditions, growth densities, and developmental stages.
- (2)
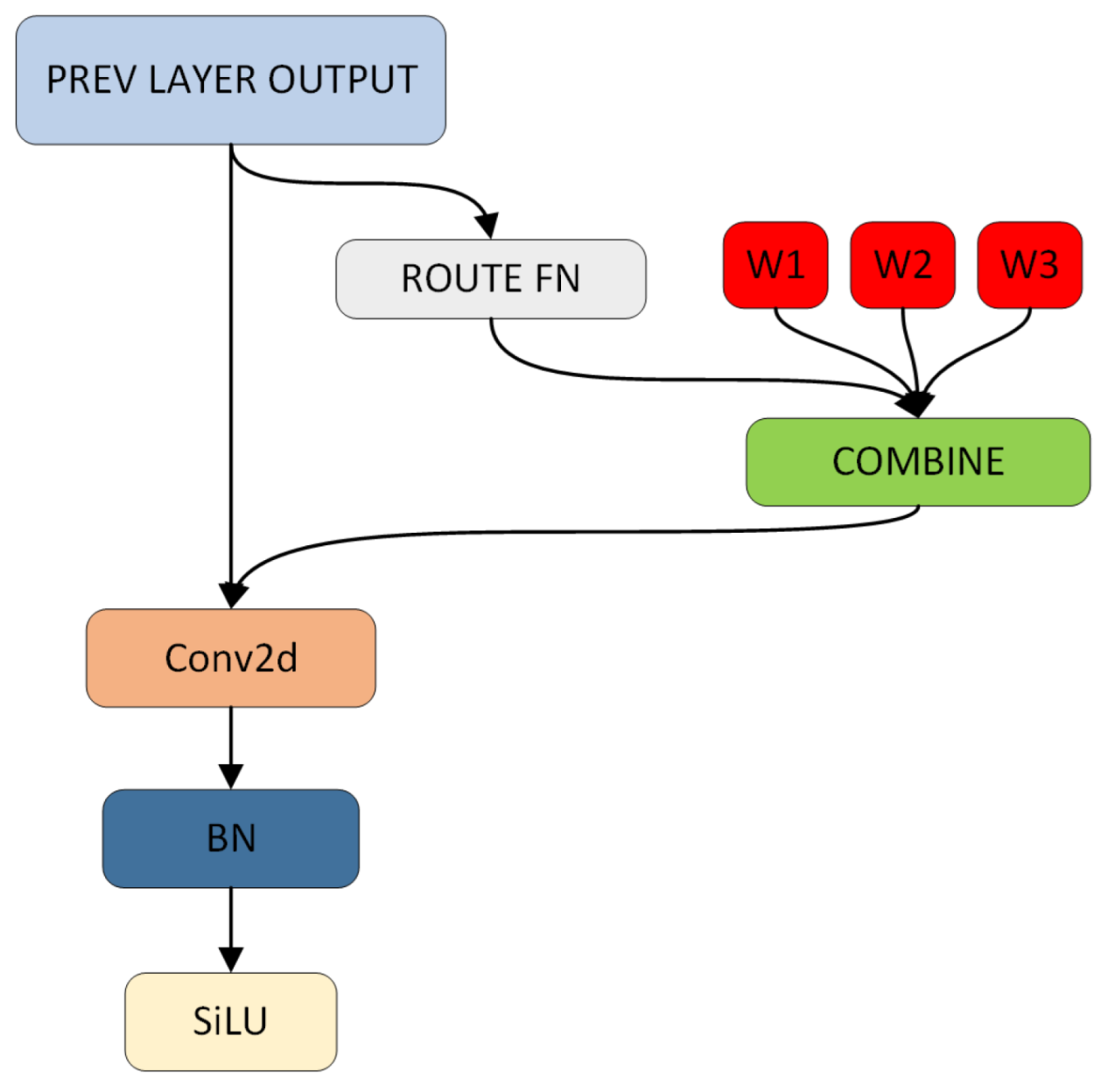
- To enhance feature extraction efficiency, CondConv is integrated into the backbone. This modification optimizes model parameters by dynamically modifying the number of convolution kernels according to the feature distribution of different samples. This method effectively improves the model’s feature representation while reducing parameter redundancy, thereby optimizing the overall computational efficiency.
- (3)
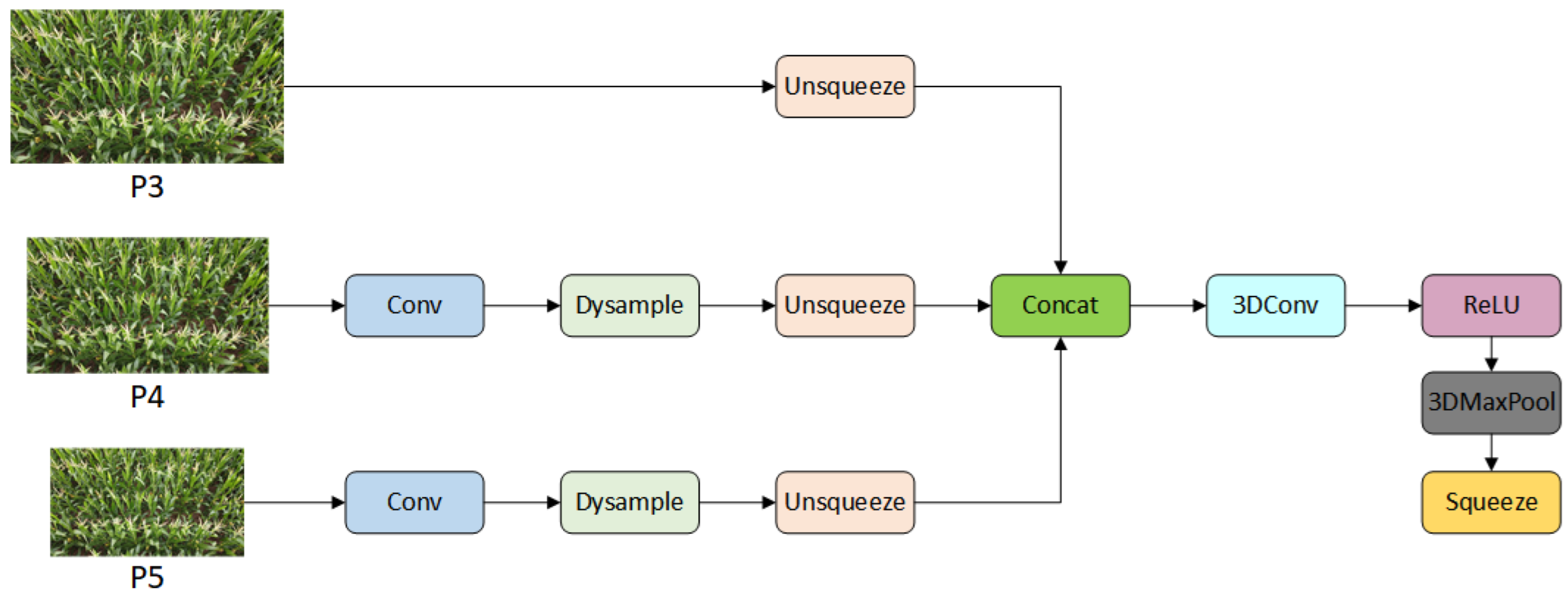
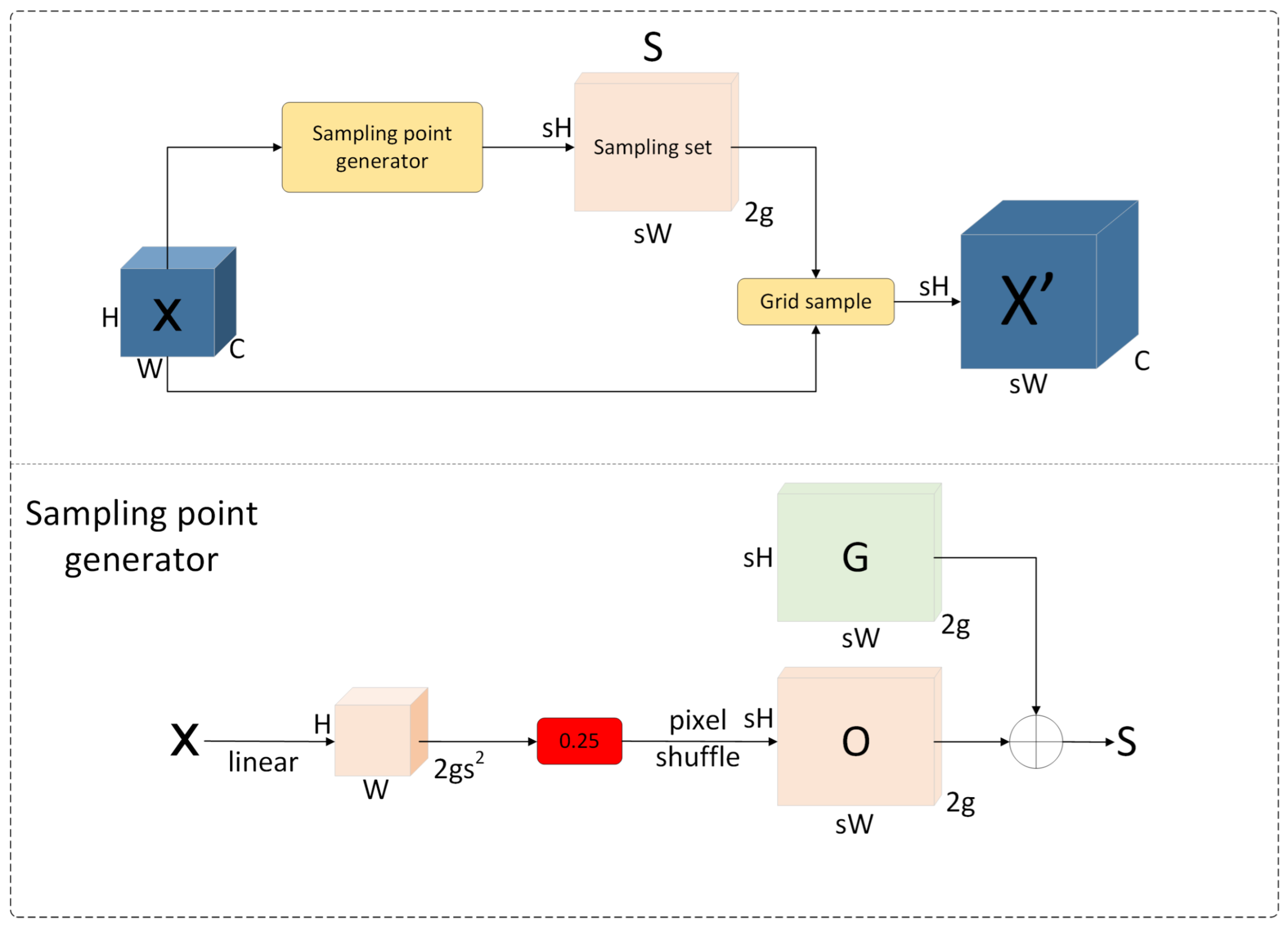
- The neck incorporates an improved Attentional Scale Sequence Fusion (ASSF) structure and designs a novel Dynamic Multi-scale Fusion (DMSF-P2) feature fusion network. The enhanced algorithm integrates the Dysample mechanism, effectively reducing computational time. In addition, a P2 layer is added to further improve early tassel detection accuracy. These improvements significantly strengthen the fusion efficiency of multi-scale feature maps.
- (4)
- The Wise-IoU (WIoU) boundary loss function is introduced to accelerate model convergence, improve boundary regression accuracy, and further boost detection performance.
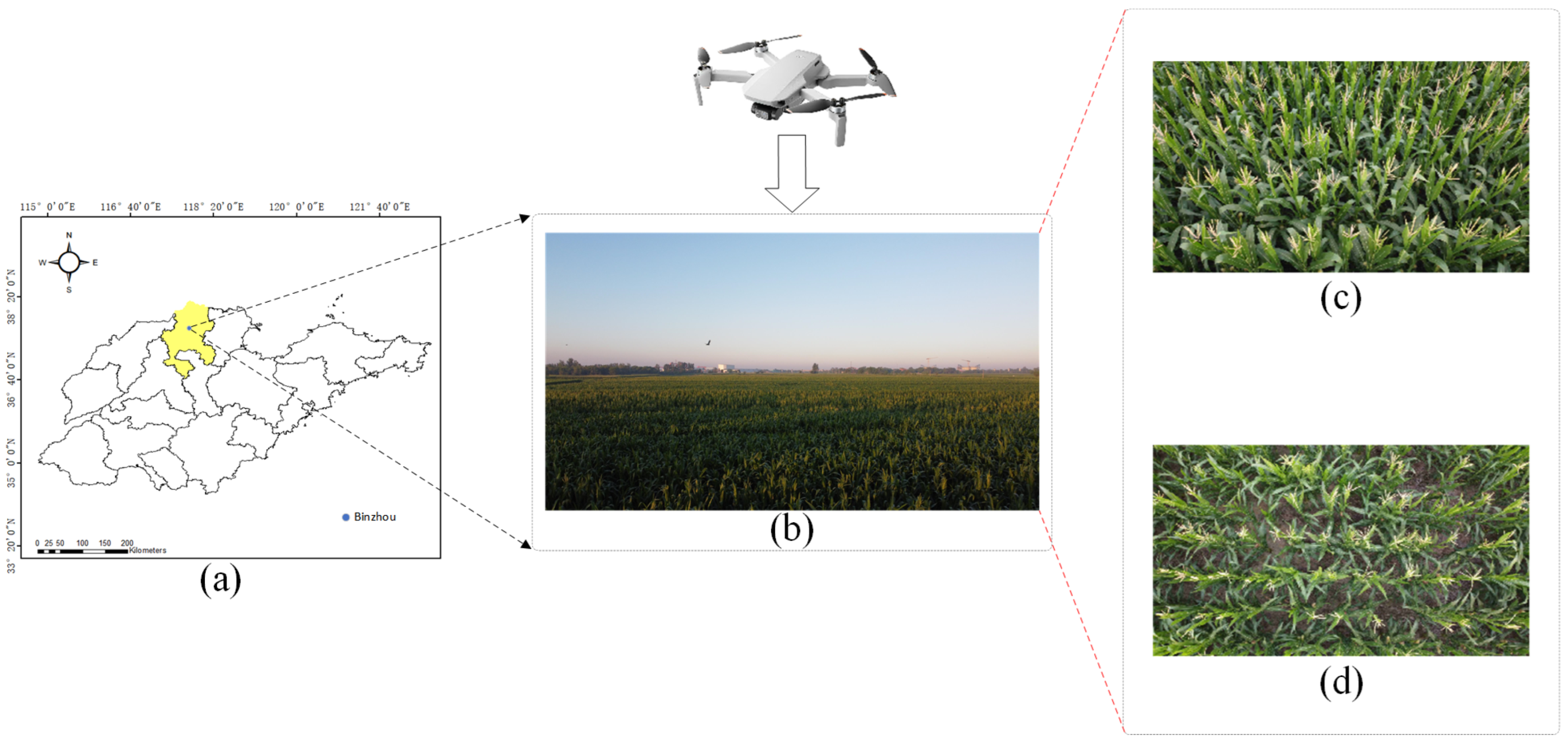
2. Study Area and Data Collection
2.1. Study Area
2.2. Dataset Creation and Data Augmentation
3. Methods
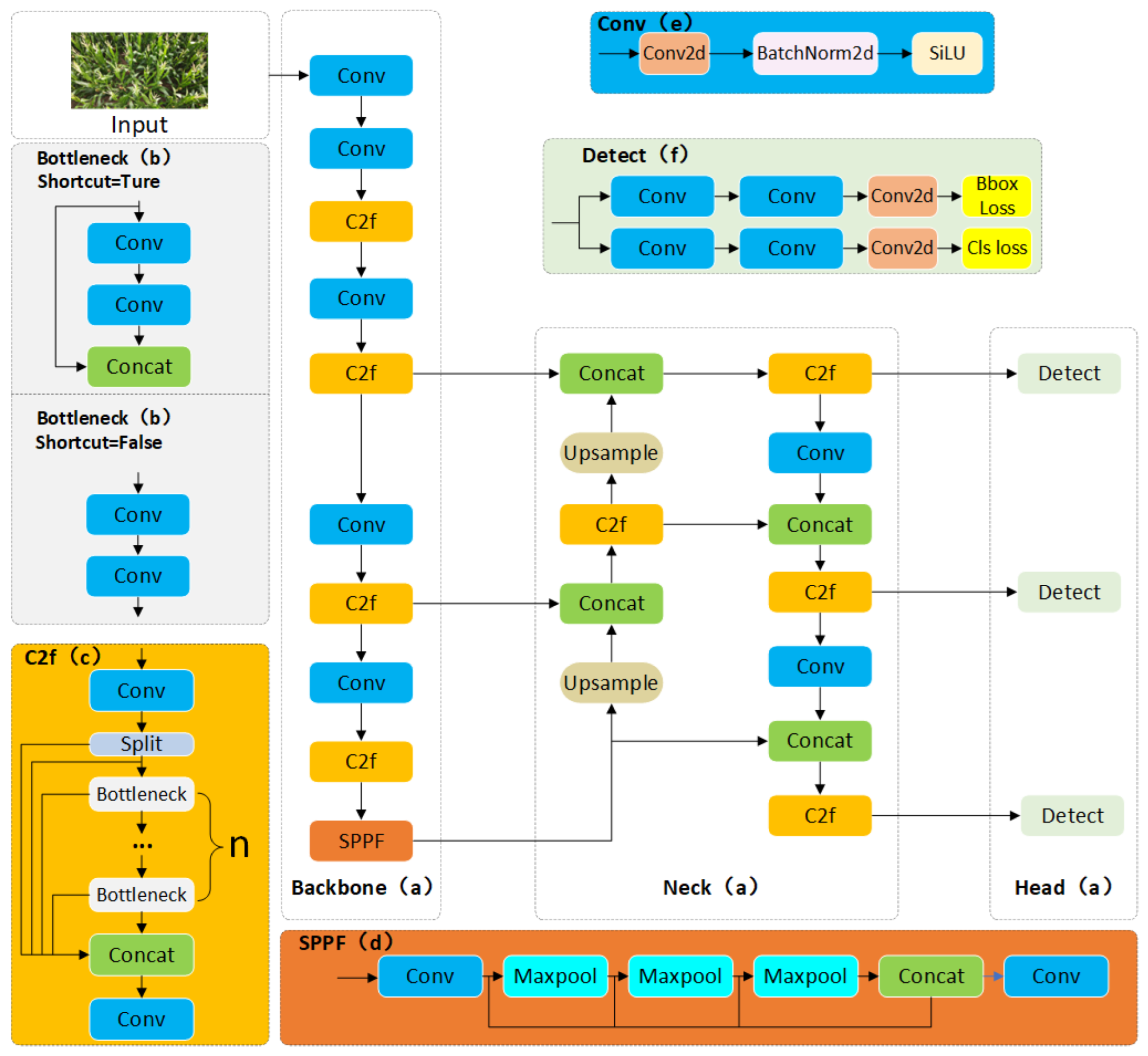
3.1. Network Framework of YOLOv8
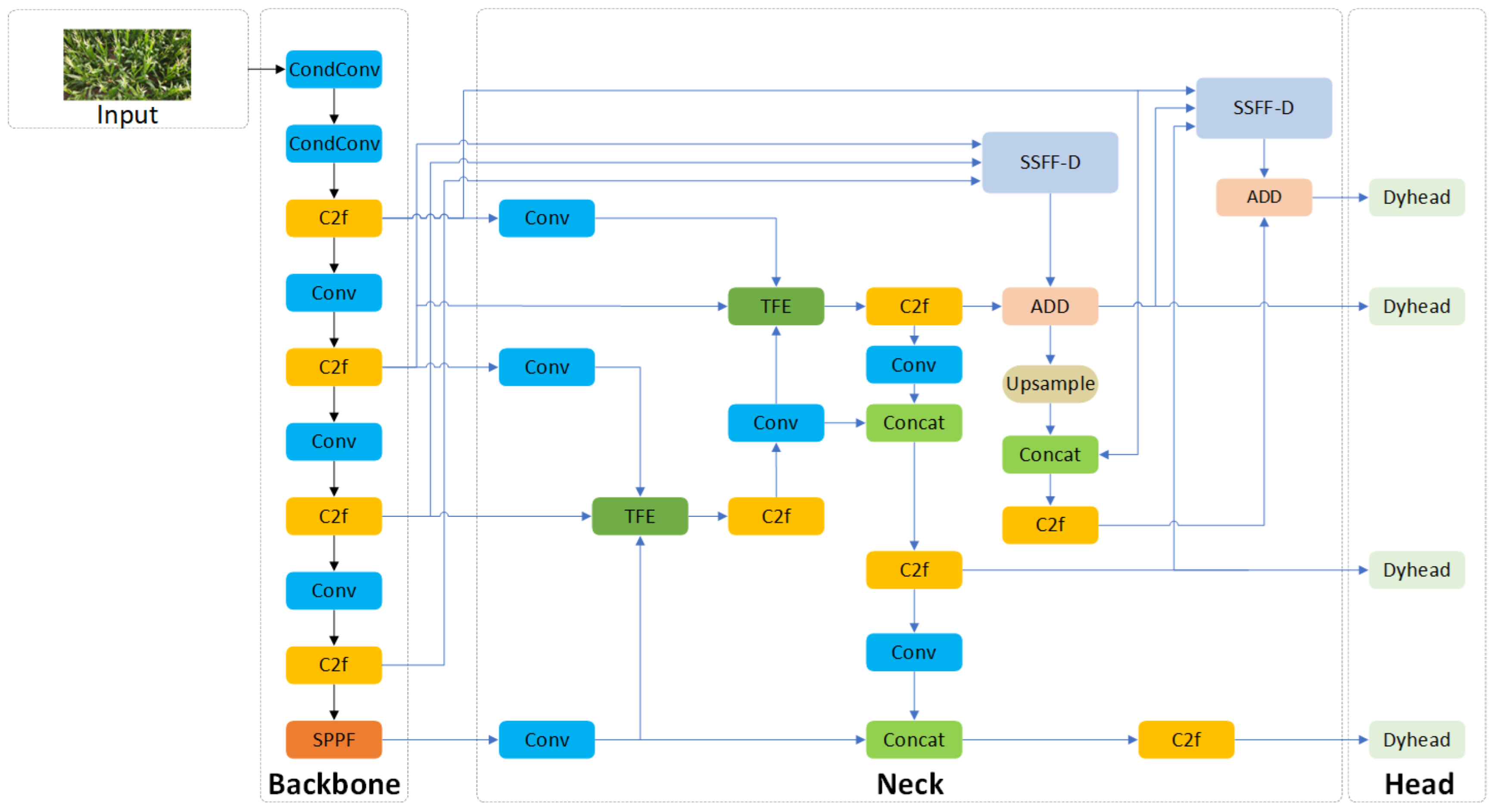
3.2. Maize Tassel Detection Network (DMSF-YOLO)
3.3. Conditionally Parameterized Convolution (CondConv)
3.4. DMSF-P2 Structure
3.4.1. SSFF-D Module
3.4.2. TFE Module
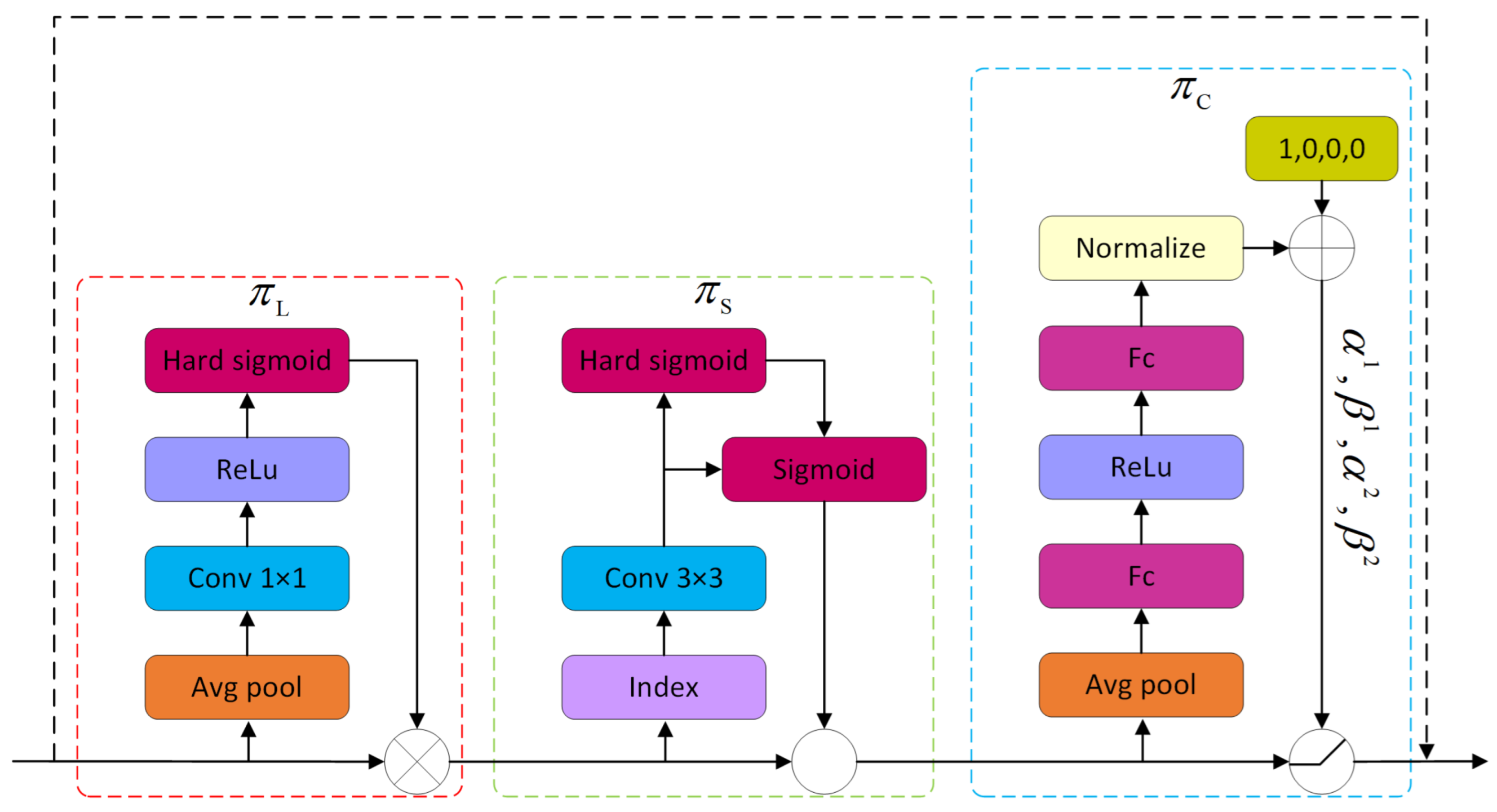
3.5. Attention Mechanism-Based Dynamic Detection Head (Dyhead)
- (1)
- The computation process of Scale-Aware Attention is demonstrated by the following formula.
- (2)
- The computation process of Spatial-Aware Attention is demonstrated by the following formula.
- (3)
- The computation process of Task-Aware Attention is demonstrated by the following formula.
3.6. Optimization Loss Function
3.7. Experimental Environment
3.8. Model Evaluation
4. Experiment and Analysis
4.1. Model Selection
4.2. Ablation Experiments
4.2.1. The Impact of Different Modules on the Baseline Model
4.2.2. The Impact of DMSF-P2 on the Baseline Model
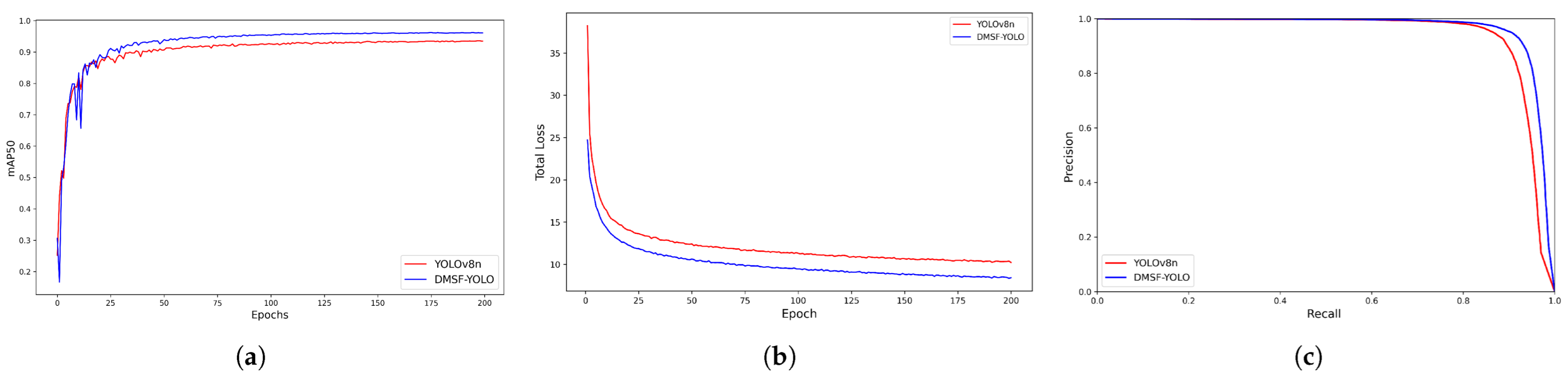
4.3. Performance Comparison Between DMSF-YOLO and YOLOv8n
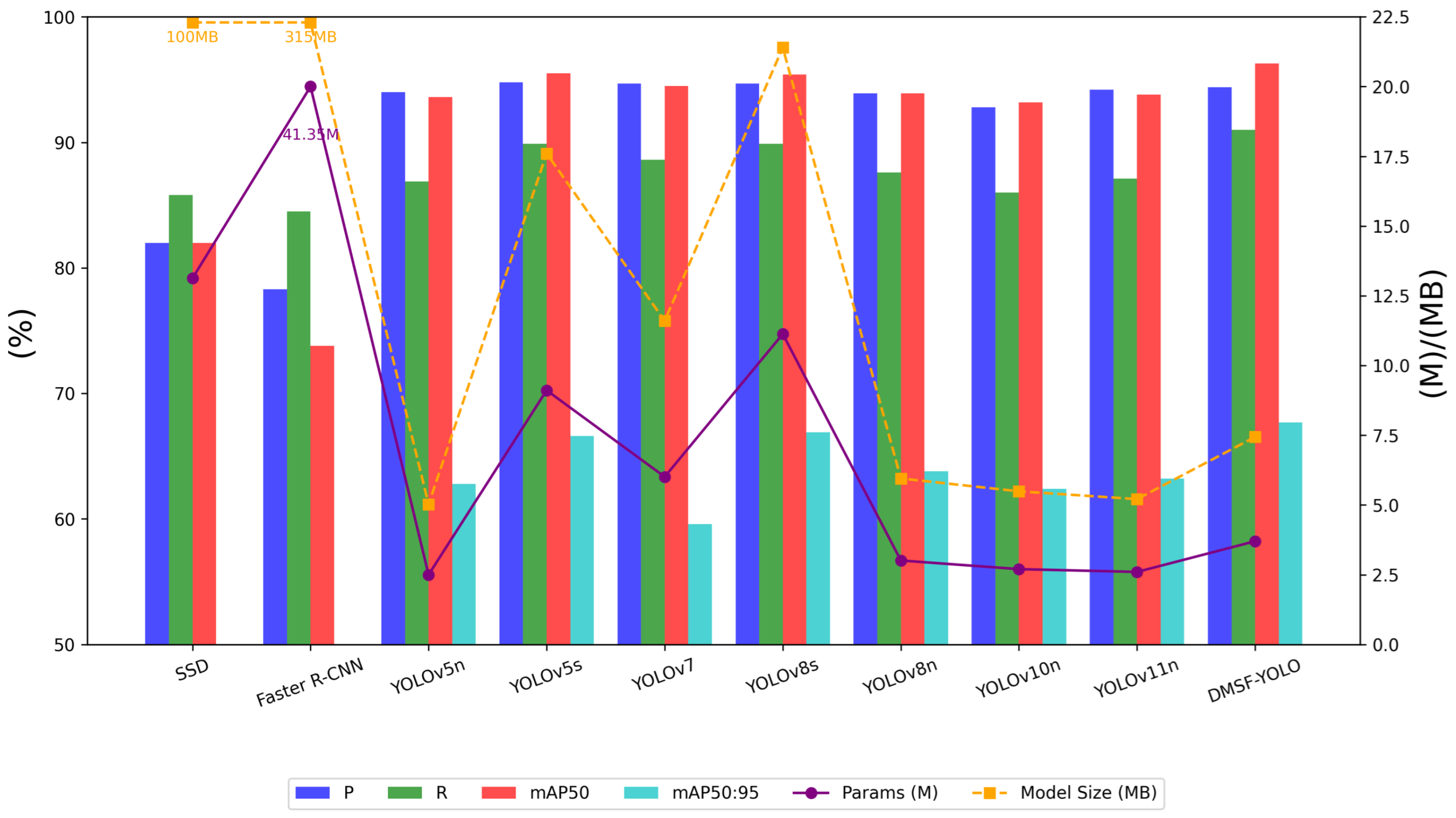
4.4. Performance Comparison of Different Object Detection Models
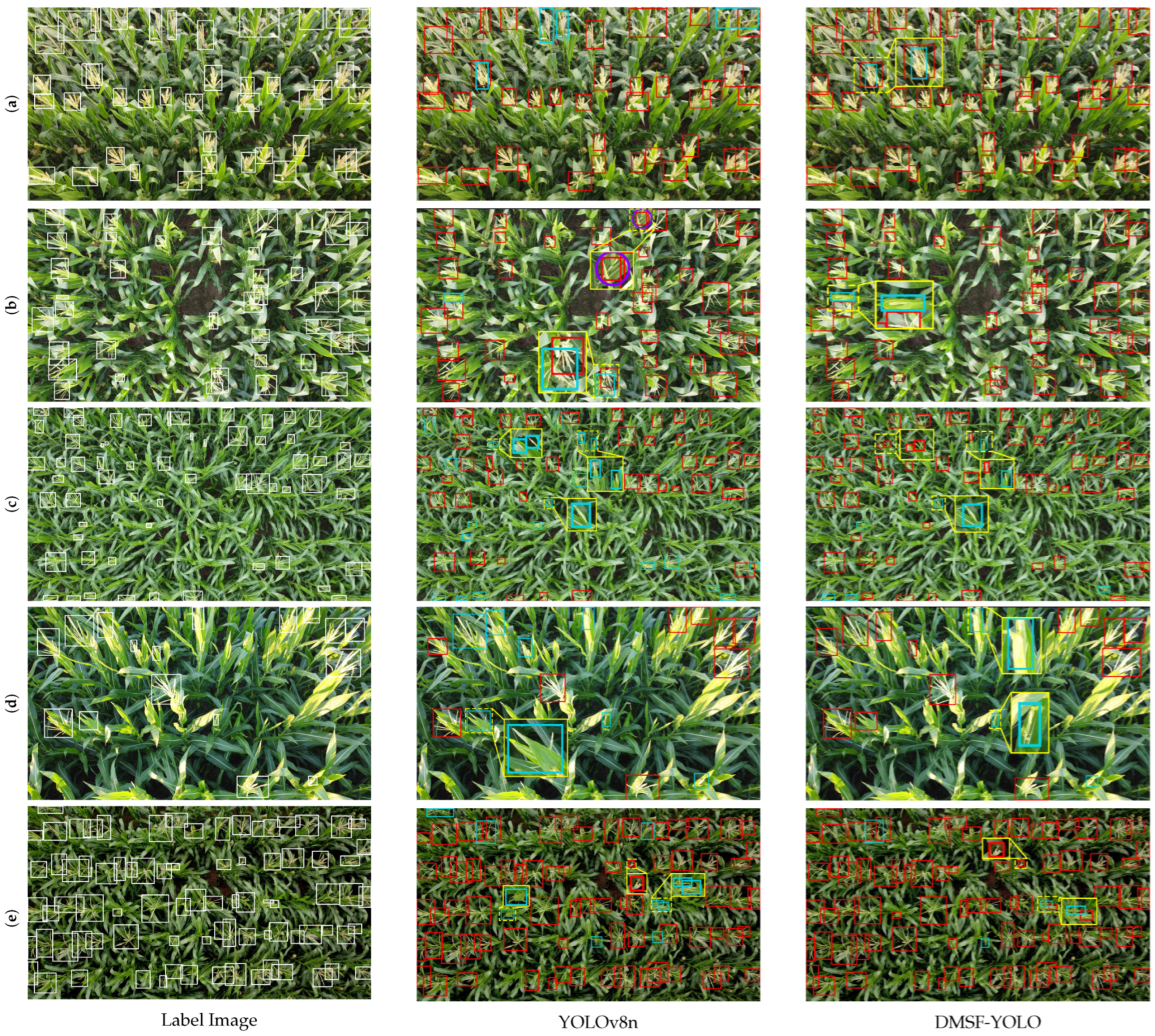
4.5. Visual Experimental Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Wei, J.; Long, Y.; Dong, Z.; Wan, X. Research Advances on Genetic Structure and Molecular Mechanism Underlying the Formation of Tassel Traits in Maize. Chin. Biotechnol. 2021, 41, 88–102. [Google Scholar]
- Li, Q.; Liu, N.; Wu, C. Novel insights into maize (Zea mays) development and organogenesis for agricultural optimization. Planta 2023, 257, 94. [Google Scholar] [CrossRef] [PubMed]
- Silvera, D.L.; Cargnelutti, A.; Neu, I.M.M.; Souza, J.M.; Kleinpaul, J.A.; Dumke, G.E. Genetic divergence in maize regarding grain yield and tassel traits. Rev. Cienc. Agron. 2021, 52, e20207509. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, C.; Yang, G.; Zhang, Y.; Liu, C.; Feng, H.; Yang, X.; Yang, H. Genotyping Identification of Maize Based on Three-Dimensional Structural Phenotyping and Gaussian Fuzzy Clustering. Agriculture 2025, 15, 85. [Google Scholar] [CrossRef]
- Wu, W.; Zhang, J.; Zhou, G.; Zhang, Y.; Wang, J.; Hu, L. ESG-YOLO: A Method for Detecting Male Tassels and Assessing Density of Maize in the Field. Agronomy 2024, 14, 241. [Google Scholar] [CrossRef]
- Rodene, E.; Fernando, G.D.; Piyush, V.; Ge, Y.F.; Schnable, J.C.; Ghosh, S.; Yang, J.L. Image Filtering to Improve Maize Tassel Detection Accuracy Using Machine Learning Algorithms. Sensors 2024, 24, 2172. [Google Scholar] [CrossRef]
- Kurtulmus, F.; Kavdir, I. Detecting maize tassels using computer vision and support vector machines. Expert Syst. Appl. 2014, 41, 7390–7397. [Google Scholar] [CrossRef]
- Kumar, A.; Desai, S.V.; Balasubramanian, V.N.; Rajalakshmi, P.; Guo, W.; Naik, B.B.; Balram, M.; Desai, U.B. Efficient Maize Tassel-Detection Method using UAV based remote sensing. Remote Sens. Appl. Soc. Environ. 2021, 23, 100549. [Google Scholar] [CrossRef]
- Zan, X.; Zhang, X.; Xing, Z.; Liu, W.; Zhang, X.; Su, W.; Liu, Z.; Zhao, Y.; Li, S. Automatic Detection of Maize Tassels from UAV Images by Combining Random Forest Classifier and VGG16. Remote Sens. 2020, 12, 3049. [Google Scholar] [CrossRef]
- Martins, J.A.C.; Hisano Higuti, A.Y.; Pellegrin, A.O.; Juliano, R.S.; de Araujo, A.M.; Pellegrin, L.A.; Liesenberg, V.; Ramos, A.P.M.; Goncalves, W.N.; Sant’Ana, D.A.; et al. Assessment of UAV-Based Deep Learning for Corn Crop Analysis in Midwest Brazil. Agriculture 2020, 14, 2029. [Google Scholar] [CrossRef]
- Mao, L.; Wang, P.; Cao, H.; Zhao, Z.; Hu, Z.; Chen, Q.; Xin, D.; Zhu, R. A high-precision automatic diagnosis method of maize developmental stage based on ensemble deep learning with IoT devices. Comput. Electron. Agric. 2024, 227, 109608. [Google Scholar] [CrossRef]
- Ishedgoma, F.S.; Rai, I.A.; Said, R.N. Identification of maize leaves infected by fall armyworms using UAV-based imagery and convolutional neural networks. Comput. Electron. Agric. 2021, 184, 106124. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H.; Fan, Y.; Yue, J.; Yang, F.; Fan, J.; Ma, Y.; Chen, R.; Bian, M.; Yang, G. Utilizing UAV-based hyperspectral remote sensing combined with various agronomic traits to monitor potato growth and estimate yield. Comput. Electron. Agric. 2025, 231, 109984. [Google Scholar] [CrossRef]
- Leite, D.; Brito, A.; Faccioli, G. Advancements and outlooks in utilizing Convolutional Neural Networks for plant disease severity assessment: A comprehensive review. Smart Agric. Technol. 2024, 9, 100573. [Google Scholar] [CrossRef]
- Zhang, C.; Marzougui, A.; Sankaran, S. Application of UAV Multisensor Data and Ensemble Approach for High-Throughput Estimation of Maize Phenotyping Traits. Plant Phenomics 2022, 2022, 9802585. [Google Scholar]
- Zhang, C.; Marzougui, A.; Sankaran, S. High-resolution satellite imagery applications in crop phenotyping: An overview. Comput. Electron. Agric. 2020, 175, 105584. [Google Scholar] [CrossRef]
- Sheng, Q.; Ma, H.; Zhang, J.; Gui, Z.; Huang, W.; Chen, D.; Wang, B. Coupling Multi-Source Satellite Remote Sensing and Meteorological Data to Discriminate Yellow Rust and Fusarium Head Blight in Winter Wheat. Phyton-Int. J. Exp. Bot. 2025, 94, 421–440. [Google Scholar] [CrossRef]
- Sanaeifar, A.; Yang, C.; de la Guardia, M.; Zhang, W.; Li, X.; He, Y. Proximal hyperspectral sensing of abiotic stresses in plants. Sci. Total Environ. 2023, 861, 160652. [Google Scholar] [CrossRef]
- Du, X.; Zhou, Z.; Huang, D. Influence of Spatial Scale Effect on UAV Remote Sensing Accuracy in Identifying Chinese Cabbage (Brassica rapa subsp. Pekinensis) Plants. Agriculture 2024, 14, 1871. [Google Scholar] [CrossRef]
- Gao, R.; Violino, S.; Pallottino, F.; Figorilli, S.; Vasta, S.; Tocci, F.; Antonucci, F.; Jin, Y.; Tian, X.; Ma, Z.; et al. YOLOv5-T: A precise real-time detection method for maize tassels based on UAV low altitude remote sensing images. Comput. Electron. Agric. 2024, 221, 108991. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, D.; Wen, R. SwinT-YOLO: Detection of densely distributed maize tassels in remote sensing images. Comput. Electron. Agric. 2023, 210, 107905. [Google Scholar] [CrossRef]
- Xun, Y.; Yin, D.; Wen, R. Maize tassel area dynamic monitoring based on near-ground and UAV RGB images by U-Net model. Comput. Electron. Agric. 2022, 203, 107477. [Google Scholar]
- Pu, H.; Chen, X.; Yang, Y.; Tang, R.; Luo, J.; Wang, Y.; Mu, J. Tassel-YOLO: A New High-Precision and Real-Time Method for Maize Tassel Detection and Counting Based on UAV Aerial Images. Drones 2023, 7, 492. [Google Scholar] [CrossRef]
- Niu, S.; Nie, Z.; Li, G.; Zhu, W. Multi-Altitude Maize Tassel Detection and Counting Based on UAV RGB Imagery and Deep Learning. Drones 2024, 8, 198. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, Y.; Sui, S.; Zhao, Y.; Li, P.; Li, X. Real-time detection and counting of wheat ears based on improved YOLOv7. Comput. Electron. Agric. 2024, 218, 108670. [Google Scholar] [CrossRef]
- Feng, Z.; Cheng, Z.; Ren, L.; Liu, B.; Zhang, C.; Zhao, D.; Sun, H.; Feng, H.; Long, H.; Xu, B.; et al. Real-time monitoring of maize phenology with the VI-RGS composite index using time-series UAV remote sensing images and meteorological data. Comput. Electron. Agric. 2024, 224, 109212. [Google Scholar] [CrossRef]
- Yang, B.; Bender, G.; Le, Q.V.; Ngiquan, G. A Comparative Study for Wheat Head Detection Through Testing the Robustness of Two Global Dataset Trained YOLO Models on a Tunisian Wheat Dataset. In Proceedings of the IEEE International Conference on Artificial Intelligence & Green Energy(ICAIGE), Yasmine Hammamet, Tunisia, 10–12 October 2024; pp. 1–6. [Google Scholar]
- Yang, B.; Bender, G.; Le, Q.V.; Ngiquan, G. CondConv: Conditionally Parameterized Convolutions for Efficient Inference. arXiv 2014, arXiv:1904.04971. [Google Scholar]
- Seki, S.; Li, L. Inference Efficient Source Separation Using Input-dependent Convolutions. In Proceedings of the 2024 Asia Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Macao, China, 3–6 December 2024; pp. 1–5. [Google Scholar]
- Hao, A.; Liang, Z.; Qin, M.; Huang, Y.; Xiong, F.; Zeng, G. Wood defect detection based on the CWB-YOLOv8 algorithm. J. Wood Sci. 2024, 70, 26. [Google Scholar]
- Kang, M.; Ting, C.-M.; Ting, F.F.; Phan, R.C.-W. ASF-YOLO: A novel YOLO model with attentional scale sequence fusion for cell instance segmentation. Image Vis. Comput. 2024, 147, 105057. [Google Scholar] [CrossRef]
- Heng, Z.; Tian, Z.; Liu, L.; Liang, H.; feng, J.; Zeng, L. Real-time detection of dead fish for unmanned aquaculture by yolov8-based UAV. Aquaculture 2025, 595, 741551. [Google Scholar]
- Huang, Z.; Shang, L. DSP-YOLO: A SAR Ship Detection Algorithm for Multiscale Sequence Fusion Based on Fusion Attention. In Proceedings of the 2024 7th International Conference on Computational Intelligence and Intelligent Systems, Nagoya, Japan, 22–24 November 2024; pp. 45–52. [Google Scholar]
- Liu, W.; Lu, H.; Fu, H.; Cao, Z. Learning to Upsample by Learning to Sample. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023; pp. 6027–6037. [Google Scholar]
- Zhao, X.; Chen, Y. YOLO-DroneMS: Multi-Scale Object Detection Network for Unmanned Aerial Vehicle (UAV) Images. Drones 2024, 8, 609. [Google Scholar] [CrossRef]
- Zhao, Z.; Ma, X.; Shi, Y.; Yang, X. Multi-scale defect detection for plaid fabrics using scale sequence feature fusion and triple encoding. Vis. Comput. 2025, 41, 5205–5221. [Google Scholar] [CrossRef]
- Jia, Y.; Fu, K.; Lan, H.; Wang, X.; Su, Z. Maize tassel detection with CA-YOLO for UAV images in complex field environments. Comput. Electron. Agric. 2024, 217, 108562. [Google Scholar] [CrossRef]
- Dai, X.; Chen, Y.; Xiao, B.; Chen, D.; Liu, M.; Yuan, L. Dynamic Head: Unifying Object Detection Heads with Attentions. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Nashville, TN, USA, 20–25 June 2021; pp. 7369–7378. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU loss: Faster and better learning for bounding box regression. In Proceedings of the 2020 34th AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 12993–13000. [Google Scholar]
- Dai, X.; Chen, Y.; Xiao, B.; Chen, D.; Liu, M.; Yuan, L. Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar]
- Song, C.; Zhang, F.; Li, J.; Zhang, J. Precise maize detasseling base on oriented object detection for tassels. Comput. Electron. Agric. 2022, 202, 107382. [Google Scholar] [CrossRef]
- Liu, Y.; Cen, C.; Chen, Y.; Ke, R.; Ma, Y. Detection of Maize Tassels from UAV RGB Imagery with Faster R-CNN. Remote Sens. 2020, 12, 338. [Google Scholar] [CrossRef]
- Chen, J.; Fu, Y.; Guo, Y.; Xu, Y.; Zhang, X.; Hao, F. An improved deep learning approach for detection of maize tassels using UAV-based RGB images. Int. J. Appl. Earth Obs. Geoinf. 2024, 130, 103922. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Sensor | Pixels | Monitoring Range | Image Resolution | Video Resolution |
|---|---|---|---|---|
| 1/2.3 | 12 million | 24 mm | 4000 × 2250 | 2720 × 1530 |
| Principal Growth Stage BBCH | BBCH Code | Description |
|---|---|---|
| Principal growth stage 5: tasseling stage | 51 | Tassel emergence begins: tassel visible at top of stem |
| 53 | Tip of tassel visible | |
| 55 | Middle of tassel emergence: middle of tassel begins to separate | |
| 59 | End of tassel emergence: tassel fully emerged and separated | |
| Principal growth stage 6: Flowering, anthesis | 61 | Male: stamens in middle of tassel visible |
| 63 | Male: beginning of pollen shedding |
| Hardware Environment | Equipment | Software Environment | Version |
|---|---|---|---|
| CPU | Intel(R) Core(TM) i9-9900KF CPU | Python | 3.9.0 |
| GPU | NVIDIA GeForce RTX 2080Ti | Pytoch | 2.1.0 |
| GPU memory | 11 GB | CUDA | 12.1 |
| RAM | 64 GB | Operating system | Windows 10 |
| Parameters | Setup |
|---|---|
| Epochs | 200 |
| Batch size | 8 |
| Learning rate | 0.01 |
| Image size | 640 × 640 |
| Optimizer | SGD |
| Number of workers | 16 |
| Method | P (%) | R (%) | mAP50 (%) | mAP50:95 (%) | Params (M) | GFLOPs (G) |
|---|---|---|---|---|---|---|
| YOLOv8n | 93.9 | 87.6 | 93.9 | 63.8 | 3.01 | 8.1 |
| YOLOv8s | 94.7 | 89.9 | 95.4 | 66.9 | 11.1 | 28.4 |
| YOLOv8m | 95.5 | 90.9 | 96.1 | 69.0 | 25.9 | 78.7 |
| YOLOv8l | 95.0 | 92.1 | 96.2 | 69.2 | 43.6 | 164.8 |
| YOLOv8x | 95.6 | 91.6 | 96.4 | 69.7 | 68.1 | 257.4 |
| Method | CondConv | MDSF-P2 | Dyhead | WIOU | P (%) | R (%) | mAP50 (%) | mAP50:95 (%) | Params (M) |
|---|---|---|---|---|---|---|---|---|---|
| Base | 93.9 | 87.6 | 93.9 | 63.8 | 3.01 | ||||
| A | ✓ | 94.6 | 87.9 | 94.4 | 64 | 6.02 | |||
| B | ✓ | 94.0 | 88.0 | 94.7 | 64.3 | 2.50 | |||
| C | ✓ | 94.7 | 88.7 | 94.8 | 65.3 | 3.99 | |||
| D | ✓ | 94.6 | 87.7 | 94.3 | 63.9 | 3.01 | |||
| E | ✓ | ✓ | 94.1 | 88.9 | 95 | 64.6 | 2.52 | ||
| F | ✓ | ✓ | 94.7 | 89.5 | 95.3 | 66.2 | 3.99 | ||
| G | ✓ | ✓ | 93.9 | 90.0 | 95.7 | 67.1 | 3.70 | ||
| H | ✓ | ✓ | ✓ | 94.5 | 90.3 | 95.9 | 67.6 | 3.70 | |
| I | ✓ | ✓ | ✓ | ✓ | 94.4 | 91.0 | 96.3 | 67.7 | 3.70 |
| Method | P (%) | R (%) | mAP50 (%) | mAP50:95 (%) | Params (M) |
|---|---|---|---|---|---|
| MSFNeck | 94.3 | 87.6 | 94.1 | 63.5 | 2.96 |
| +P2 | 93.6 | 87.5 | 94.4 | 63.9 | 2.49 |
| +Dysample | 94.1 | 88.4 | 94.3 | 64 | 2.96 |
| +Dysample+P2 | 94 | 88.5 | 94.8 | 64.4 | 2.5 |
| Method | P (%) | R (%) | mAP50 (%) | mAP50:95 (%) |
|---|---|---|---|---|
| YOLOv8n | 93.9 | 87.6 | 93.9 | 63.8 |
| DMSF_YOLO | 94.4 | 91 | 96.3 | 67.7 |
| Method | P (%) | R (%) | mAP50 (%) | mAP50:95 (%) | Params (M) | Size (MB) |
|---|---|---|---|---|---|---|
| SSD | 82.0 | 85.8 | 82.0 | 41.2 | 13.13 | 100 |
| Faster R-CNN | 78.3 | 84.5 | 73.8 | 40.2 | 41.35 | 315 |
| YOLOv5n | 94.0 | 86.9 | 93.6 | 62.8 | 2.50 | 5.02 |
| YOLOv5s | 94.8 | 89.9 | 95.5 | 66.6 | 9.11 | 17.6 |
| YOLOv7 | 94.7 | 88.6 | 94.5 | 59.6 | 6.01 | 11.6 |
| YOLOv8s | 94.7 | 89.9 | 95.4 | 66.9 | 11.13 | 21.4 |
| YOLOv10n | 92.8 | 86.0 | 93.2 | 62.4 | 2.70 | 5.49 |
| YOLOv11n | 94.2 | 87.1 | 93.8 | 63.2 | 2.58 | 5.21 |
| DMSF-YOLO | 94.4 | 91.0 | 96.3 | 67.7 | 3.70 | 7.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Fang, J.; Zhao, Y. DMSF-YOLO: A Dynamic Multi-Scale Fusion Method for Maize Tassel Detection in UAV Low-Altitude Remote Sensing Images. Agriculture 2025, 15, 1259. https://doi.org/10.3390/agriculture15121259
Liu D, Fang J, Zhao Y. DMSF-YOLO: A Dynamic Multi-Scale Fusion Method for Maize Tassel Detection in UAV Low-Altitude Remote Sensing Images. Agriculture. 2025; 15(12):1259. https://doi.org/10.3390/agriculture15121259
Chicago/Turabian StyleLiu, Dongbin, Jiandong Fang, and Yudong Zhao. 2025. "DMSF-YOLO: A Dynamic Multi-Scale Fusion Method for Maize Tassel Detection in UAV Low-Altitude Remote Sensing Images" Agriculture 15, no. 12: 1259. https://doi.org/10.3390/agriculture15121259
APA StyleLiu, D., Fang, J., & Zhao, Y. (2025). DMSF-YOLO: A Dynamic Multi-Scale Fusion Method for Maize Tassel Detection in UAV Low-Altitude Remote Sensing Images. Agriculture, 15(12), 1259. https://doi.org/10.3390/agriculture15121259