Development and Control of an Electro-Hydraulic Actuator System for an Exoskeleton Robot

Abstract
1. Introduction
2. Design of Axial Piston Pump
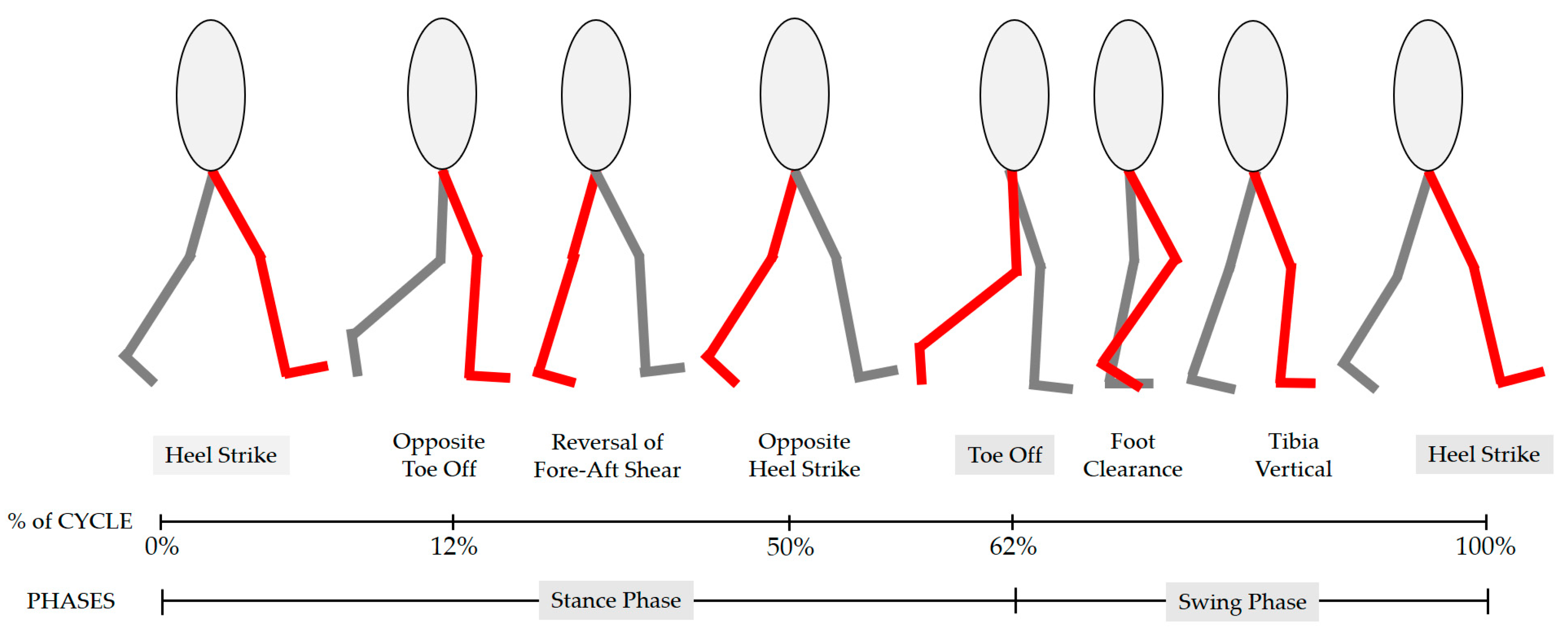
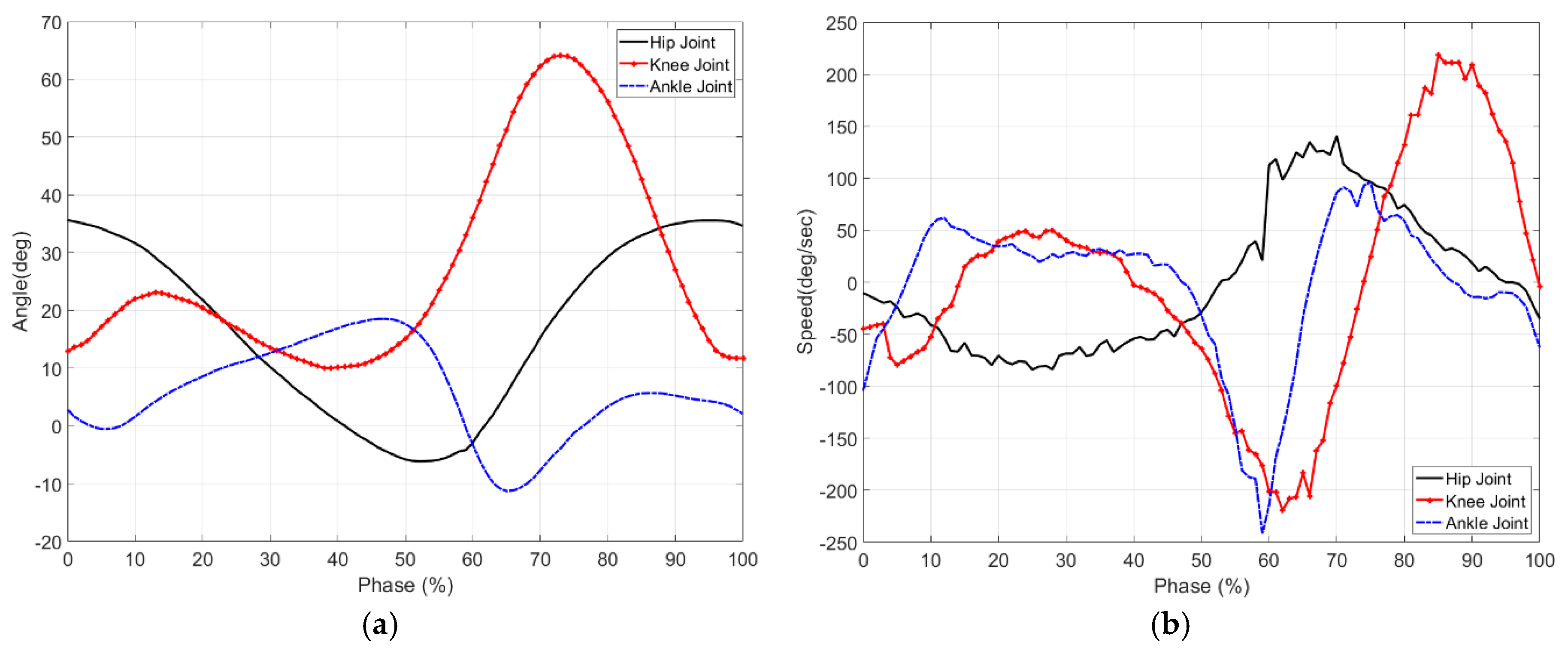
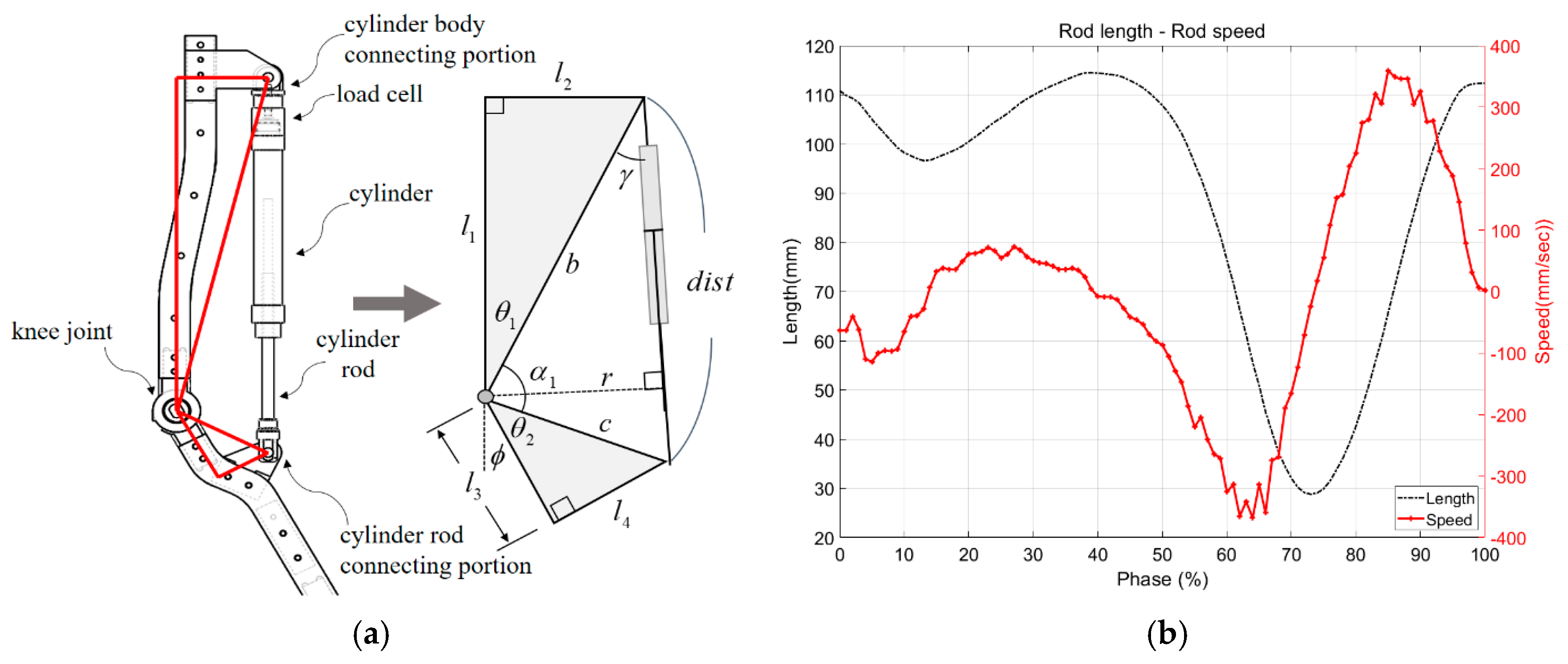
2.1. Analysis of Gait and Calculation of the Required Flow Rate
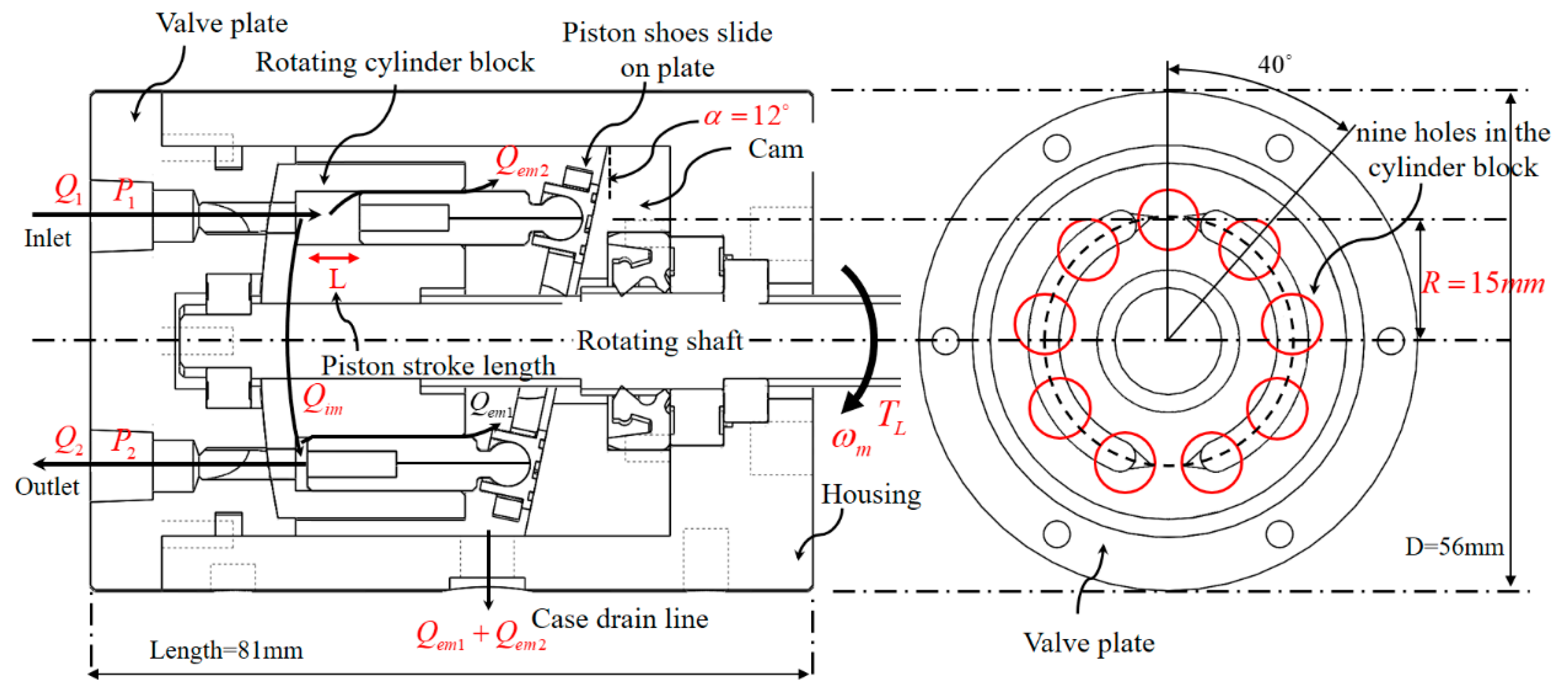
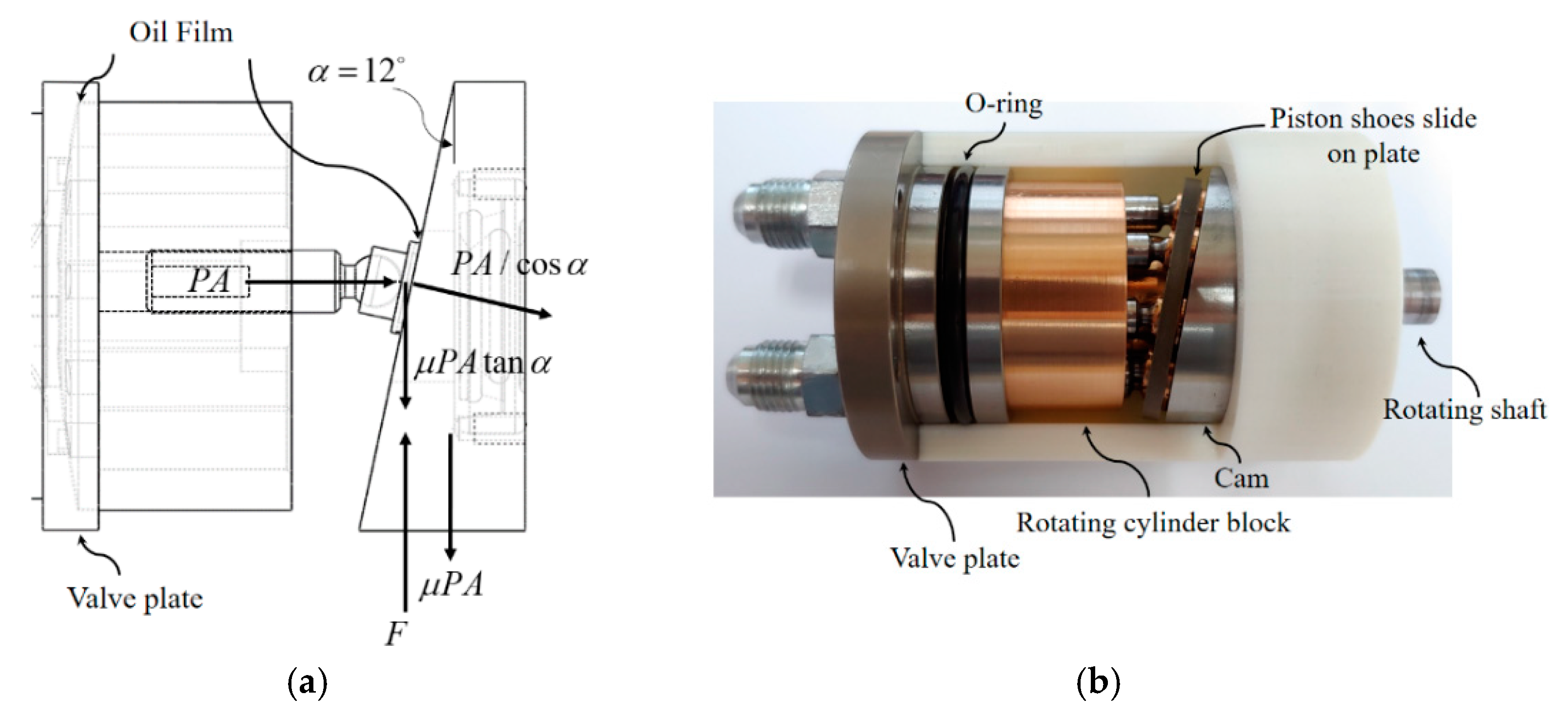
2.2. Design of the Piston Pump
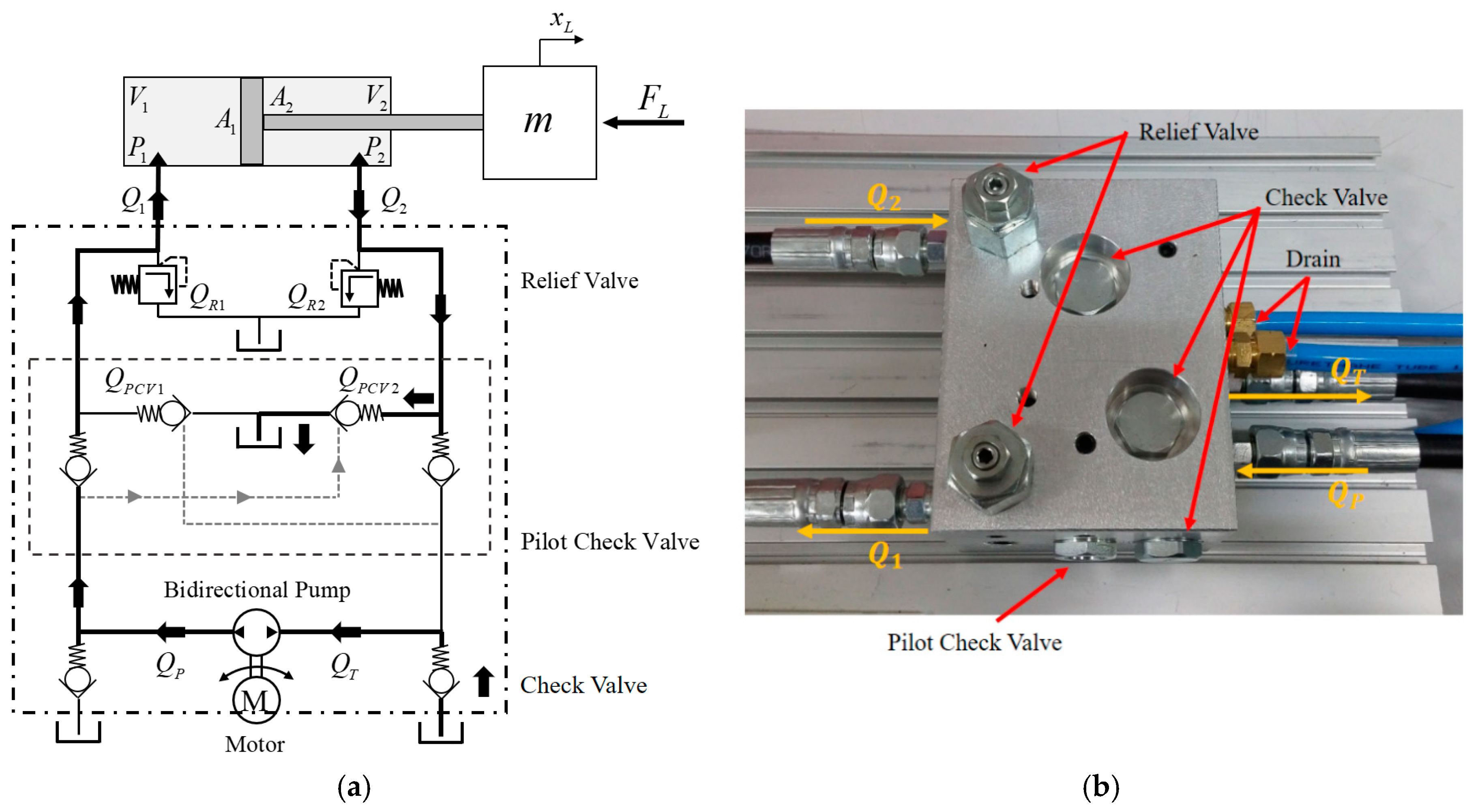
3. Design of the Hydraulic Circuit
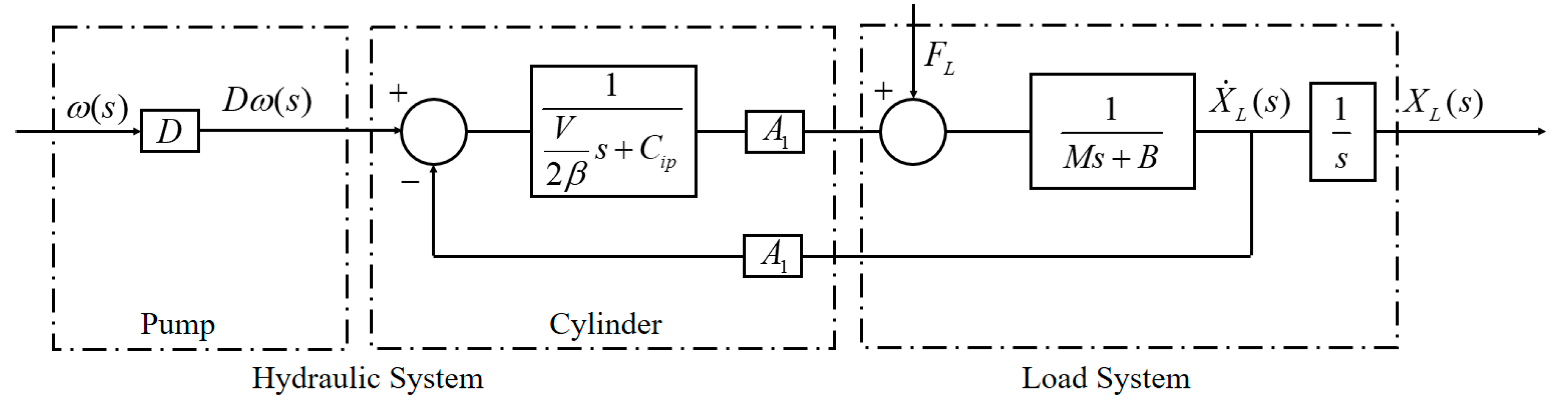
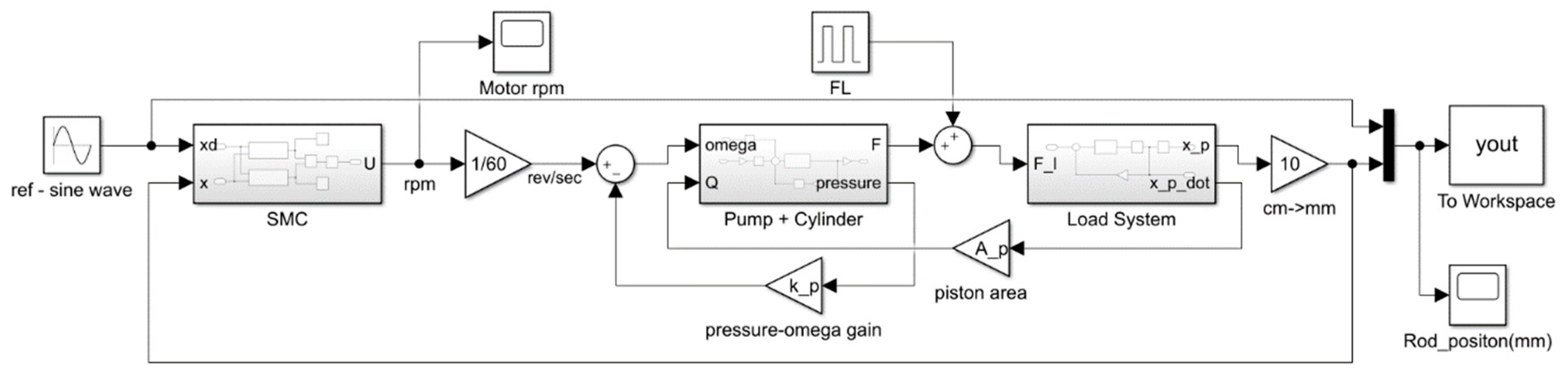
4. Modeling of the EHA System
5. The Position and Force Control Experiments
5.1. Design of the Sliding Mode Control
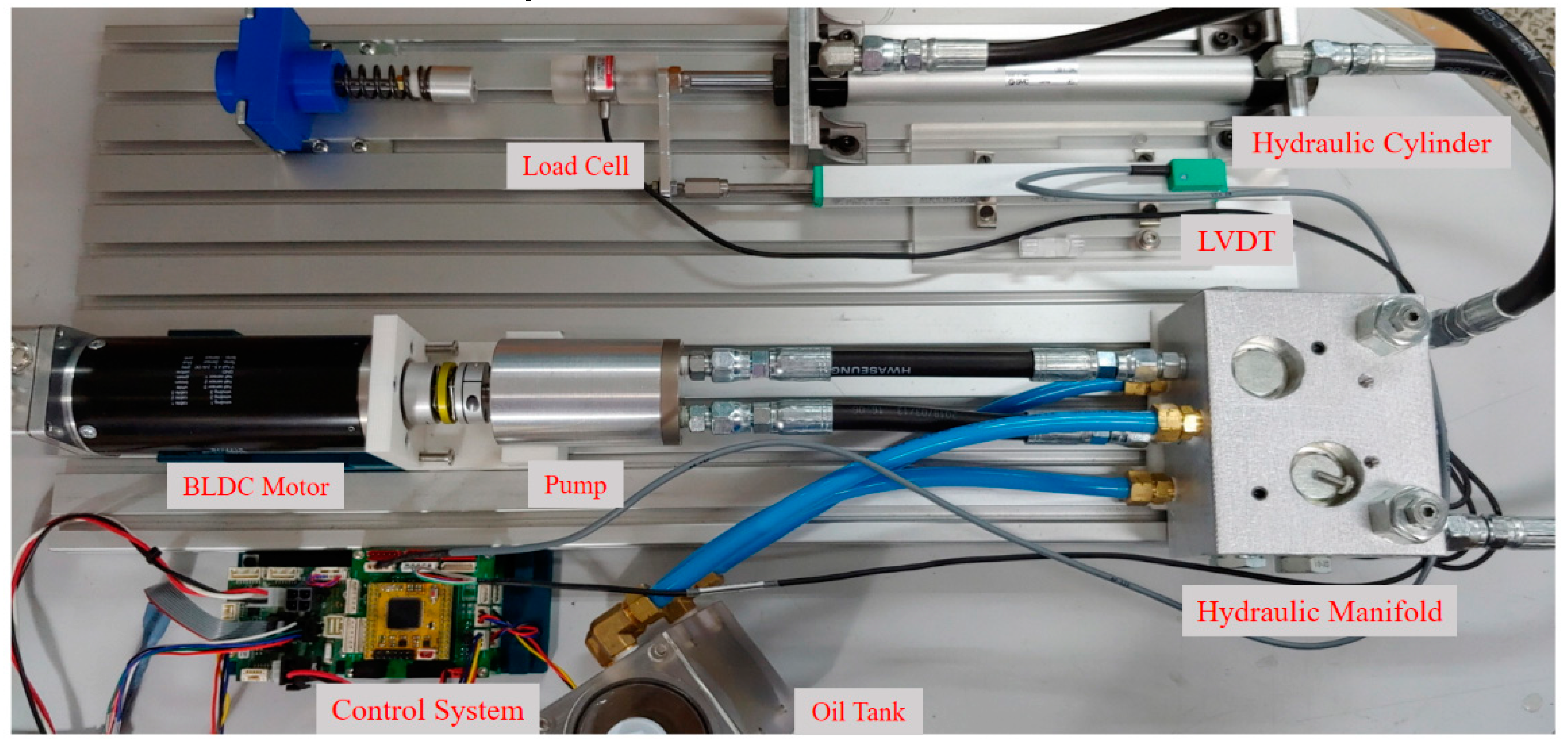
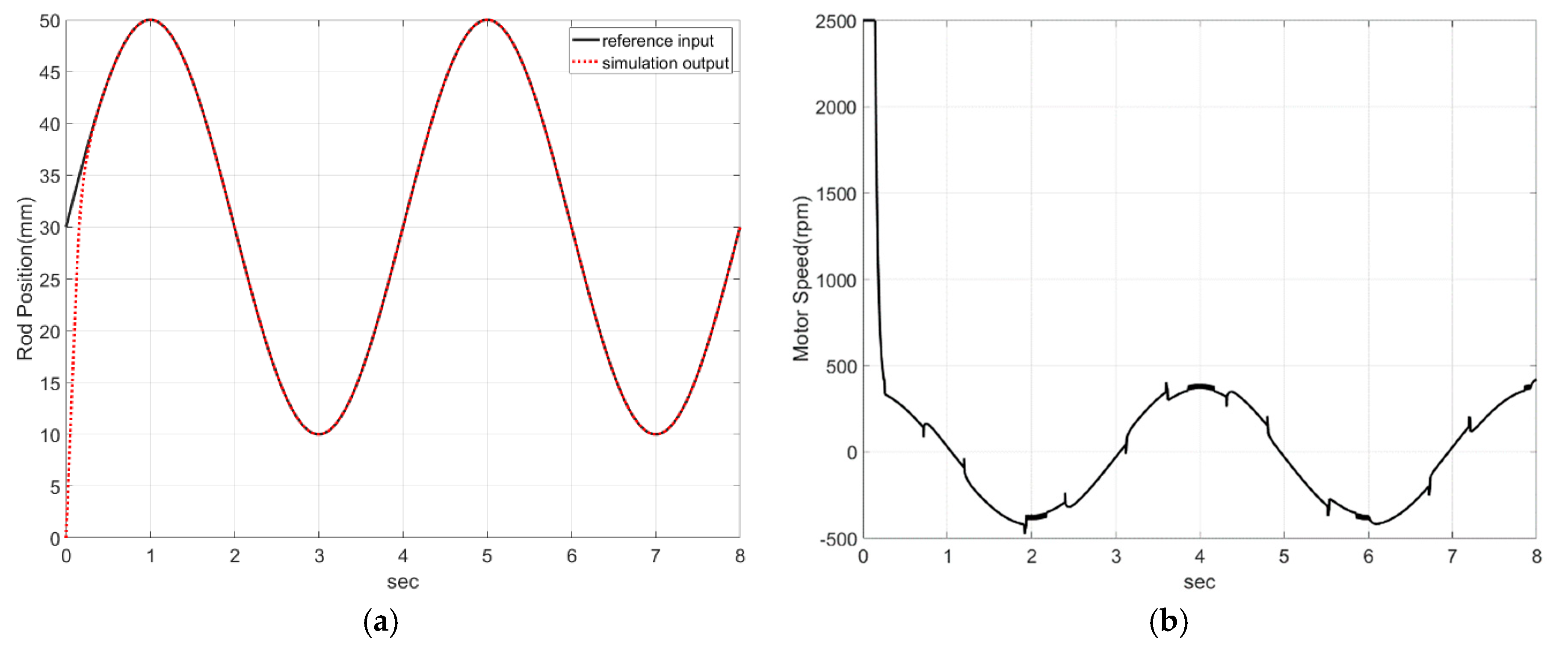
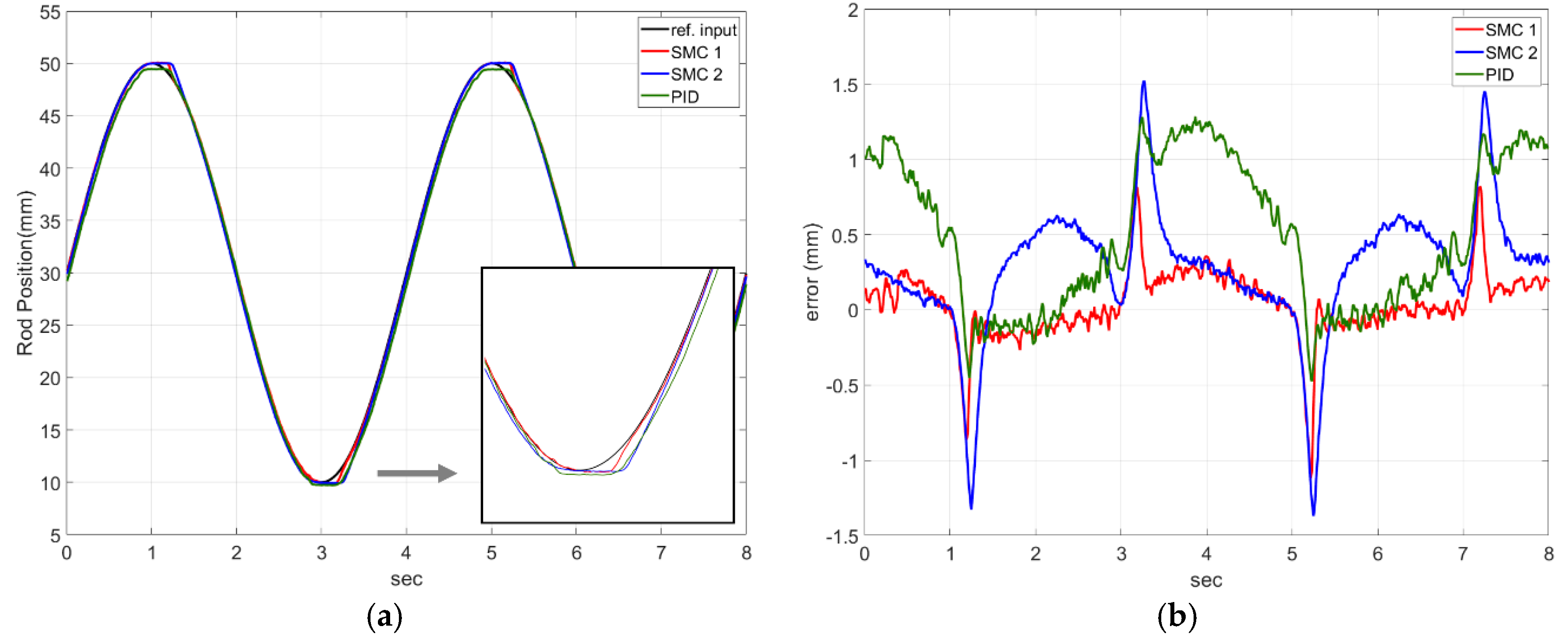
5.2. Experiment Configuration and Control Experiments
6. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Farris, R.J.; Quintero, H.A.; Goldfarb, M. Preliminary Evaluation of a Powered Lower Limb Orthosis to Aid Walking in Paraplegic Individuals. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 652–659. [Google Scholar] [CrossRef] [PubMed]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk™ exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef] [PubMed]
- Ikeuchi, Y.; Ashihara, J.; Hiki, Y.; Kudoh, H.; Noda, T. Walking assist device with bodyweight support system. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 4073–4079. [Google Scholar]
- Hassan, M.; Kadone, H.; Suzuki, K.; Sankai, Y. Exoskeleton robot control based on cane and body joint synergies. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Algarve, Portugal, 7–12 October 2012; pp. 1609–1614. [Google Scholar]
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Kawamoto, H.; Sankai, Y. Power assist method based on Phase Sequence and muscle force condition for HAL. Adv. Robot. 2005, 19, 717–734. [Google Scholar] [CrossRef]
- Yu, S.N.; Lee, H.D.; Lee, S.H.; Kim, W.S.; Han, J.S.; Han, C.S. Design of an under-actuated exoskeleton system for walking assist while load carrying. Adv. Robot. 2012, 26, 561–580. [Google Scholar] [CrossRef]
- Huo, W.; Mohammed, S.; Moreno, J.C.; Amirat, Y. Lower Limb Wearable Robots for Assistance and Rehabilitation: A State of the Art. IEEE Syst. J. 2014, 10, 1068–1081. [Google Scholar] [CrossRef]
- Lee, S.J.; Oh, J.W.; Lee, Y.K.; Choi, J.H. Development of Micro Hydraulic Actuator for force assistive wearable robot. In Proceedings of the IEEE ISR 2013, Seoul, South Korea, 24–26 October 2013. [Google Scholar]
- Bechet, F.; Ohnishi, K. Electro-hydraulic force transmission for rehabilitation exoskeleton robot. In Proceedings of the AMC2014-Yokohama, Yokohama, Japan, 14–16 March 2014; pp. 260–265. [Google Scholar]
- Amundson, K.; Raade, J.; Harding, N.; Kazerooni, H. Development of Hybrid Hydraulic-Electric Power Units for Field and Service Robots. Adv. Robot. 2006, 20, 1015–1034. [Google Scholar] [CrossRef][Green Version]
- Kim, H.-G.; Lee, J.-W.; Jang, J.; Park, S.; Han, C. Design of an exoskeleton with minimized energy consumption based on using elastic and dissipative elements. Int. J. Control Autom. Syst. 2015, 13, 463–474. [Google Scholar] [CrossRef]
- Kim, H.; Shin, Y.J.; Kim, J. Design and locomotion control of a hydraulic lower extremity exoskeleton for mobility augmentation. Mechatronics 2017, 46, 32–45. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Y.; Jiang, J.; Sun, B.; Cao, H. Unidirectional variable stiffness hydraulic actuator for load-carrying knee exoskeleton. Int. J. Adv. Robot. Syst. 2017, 14, 1–12. [Google Scholar] [CrossRef]
- Lee, W.Y.; Kim, M.J.; Chung, W.K. An approach to development of electro hydrostatic actuator (EHA)-based robot joints. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 99–106. [Google Scholar]
- Kazerooni, H. Exoskeletons for human power augmentation. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3459–3464. [Google Scholar]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Habibi, S.; Goldenberg, A. Design of a New High Performance ElectroHydraulic Actuator. In Proceedings of the International Conference on Advanced Intelligent Mechatronics Proceedings, Atlanta, GA, USA, 19–23 September 1999; Volume 9, pp. 227–232. [Google Scholar]
- Kou, F.; Wang, Z.; Du, J.; Li, D.; Fan, E. Study on force tracking control of electro-hydraulic active suspension. In Proceedings of the 2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 3–5 October 2017; pp. 1078–1082. [Google Scholar]
- Gaile, A.; Lue, Y. Electro Hydraulic Actuation (EHA) systems for primary flight control, landing gear and other type of actuation. In Proceedings of the International 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 723–728. [Google Scholar]
- Rose, J.; Gamble, J.G. HumanWalking, 2nd ed.; Williams & Wilkins: Baltimore, MD, USA, 1994. [Google Scholar]
- Cho, S.H.; Park, J.M.; Kwon, O.Y. Gender differences in three dimensional gait analysis data from 98 healthy Korean adults. Clin. Biomech. 2004, 19, 145–152. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.J. Hydraulic Engineering; Bookshill: Seoul, Korea, 2002. [Google Scholar]
- Guo, K.; Xu, Y.; Li, J. A Switched Controller Design for Supply Pressure Tracking of Variable Displacement Axial Piston Pumps. IEEE Access 2018, 6, 3932–3942. [Google Scholar] [CrossRef]
- Zhang, J.; Qun, C.H.A.O.; Bing, X.U. Analysis of the cylinder block tilting inertia moment and its effect on the performance of high-speed electro-hydrostatic actuator pumps of aircraft. Chin. J. Eronaut. 2018, 31, 169–177. [Google Scholar] [CrossRef]
- Ahn, K.K.; Nam, D.N.C.; Jin, M. Adaptive Backstepping Control of an Electrohydraulic Actuator. IEEE/ASME Trans. Mechatron. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Merritt, H.E. Hydraulic Control Systems; Wiley: New York, NY, USA, 1967. [Google Scholar]
- Mathworks. Available online: https://kr.mathworks.com/help/physmod/hydro/ref/pilotoperatedcheckvalve.html?s_tid=srchtitle (accessed on 18 June 2019).
- Yao, B.; Bu, F.; Reedy, J.; Chiu, G.T.C. Adaptive Robust Motion Control of Single-Rod Hydraulic Actuators: Theory and Experiments. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999; pp. 759–763. [Google Scholar]
- Slotine, J.-J.E.; Li, W. Applied Nonliear Control; Prentice-Hall Publisher: Upper Saddle River, NJ, USA, 1991; pp. 277–294. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| z | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|
| [%] | 4.98 | 14.0 | 2.53 | 7.81 | 1.53 | 4.97 | 1.02 | 3.45 |
| Pump Components | Unit | Value | Motor Parameters | Unit | Value |
|---|---|---|---|---|---|
| Diameter of Pump | mm | 56 | Nominal Voltage | V | 48 |
| Length of Pump | mm | 81 | No Load Speed | rpm | 5370 |
| Number of Pistons | EA | 9 | Nominal Speed | rpm | 4960 |
| Diameter of Piston | mm | 6 | Nominal Torque | mNm | 768 |
| Stroke Length | mm | 6.37 | Nominal Current | A | 9.56 |
| Volumetric Displacement | cc/rev | 1.51 | Torque Constant | mNm/A | 84.9 |
| Cam angle | degree | 12 | Speed Constant | rpm/V | 113 |
| Parameter | Unit | Value |
|---|---|---|
| 3.1416 | ||
| 0.2 | ||
| cc/rev | 1.5 | |
| N/(cm/s) | 0.1 | |
| 32.32 | ||
| 0.001 |
| Position Control | Force Control | ||
|---|---|---|---|
| SMC1 | SMC1 | ||
| SMC2 | SMC2 | ||
| PID | SMC3 | ||
| PID1 | |||
| PID2 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, D.; Song, B.; Park, S.Y.; Baek, Y.S. Development and Control of an Electro-Hydraulic Actuator System for an Exoskeleton Robot. Appl. Sci. 2019, 9, 4295. https://doi.org/10.3390/app9204295
Lee D, Song B, Park SY, Baek YS. Development and Control of an Electro-Hydraulic Actuator System for an Exoskeleton Robot. Applied Sciences. 2019; 9(20):4295. https://doi.org/10.3390/app9204295
Chicago/Turabian StyleLee, Dongyoung, Buchun Song, Sang Yong Park, and Yoon Su Baek. 2019. "Development and Control of an Electro-Hydraulic Actuator System for an Exoskeleton Robot" Applied Sciences 9, no. 20: 4295. https://doi.org/10.3390/app9204295
APA StyleLee, D., Song, B., Park, S. Y., & Baek, Y. S. (2019). Development and Control of an Electro-Hydraulic Actuator System for an Exoskeleton Robot. Applied Sciences, 9(20), 4295. https://doi.org/10.3390/app9204295