1. Introduction
Unmanned aerial vehicle (UAV) mission allocation means to allocate and aggregate the available UAV resources depending on the mission requirements and the resource status [
1,
2]. Obviously, some missions are more pivotal than others in the reconnaissance process for military operation, therefore, priorities are usually assigned to the locations [
3,
4].
The mathematical modeling and optimizing for multi-UAV mission allocation is a key issue in the study of UAV issues [
5,
6,
7,
8]. Mehdi et al. described a mathematical model with tightly coupled missions and rigid relative timing constraints and achieved good simulation results of the model with a tabu search algorithm [
9]. Tian et al. proposed a mathematical model with time window constraints and used a multi-objective genetic algorithm (CR-MOGA) to solve this problem [
10,
11]. Steven J. and Shima presented an improved tree search algorithm for the UAV mission planning problem and completed the overall simulation experiment [
12]. Meir et al. considered this problem with sequential resource allocation and proposed an information gain in the mathematical model [
13]. Deng et al. proposed an improved genetic algorithm for the UAV mission planning problem with limited resources, and the simulation results were analyzed and verified [
14]. Lanah et al. presented a maximum coverage stochastic orienteering problem with time windows (MCS-OPTW) planning approach for mission planning and showed the simulation data [
15]. Zhu et al. proposed a new reconnaissance mission planning model and used a genetic algorithm with the UAVs’ task sequence to solve the model [
16]. The existing reconnaissance mission models used the shortest path as the objective function and only considered a single task sequence assignment without considering the reconnaissance time allocation of the UAV. In reality, the allocation of reconnaissance time is often the decisive factor in determining the success of the reconnaissance mission and the core indicator that the commander is concerned about. The new model proposed in this paper considers the reconnaissance reward maximization as the objective function. By considering the allocation of each UAV’s reconnaissance time resource, the reconnaissance time allocation and task sequence allocation are considered simultaneously.
The UAV mission planning problem is the extended multiple Dubins traveling salesmen problem (MDTSP), which is a typical NP-hard combinatorial optimization problem. Some studies translated related models into a mixed integer linear programming (MILP) and achieved good results [
17,
18,
19]. The time window was first applied to the vehicle routing problem (VRP) problem model. Righini and Salani systematically introduced the VRP with time window and presented an exact optimization algorithm for the orienteering problem with time windows [
20]. Then Li et al. [
21] and Tas et al. [
22] improved the VRP problem with time windows and completed simulation verification. The existing time window problem model only required the time window problem condition without considering the equilibrium problem. In the actual result, it is clear that certain UAVs perform more tasks, while the other UAVs perform fewer tasks. When a UAV flies back to the base, another UAV may only perform half of the total mission. In this paper, by considering the time window factor, each UAV’s resource is reasonably and evenly distributed. Thus, the time window model is more in line with actual military requirements.
Lingo software was developed by Professor Linus Schrage in 1980s, and it can independently solve problems, such as linear programming problems, nonlinear programming problems, and mixed integer programming problems [
23]. Many existing studies have proven the advantages and effectiveness of Lingo software in solving these problem models in different fields. Salarian and Fazlollahtabar presented a new mathematical model to solve a facility layout problem in cellular manufacturing systems with stochastic demands, which is solved by the Lingo software to get the computational results [
24]. He and Ye used the Lingo language to solve a logistic distribution center site selection model [
25]. Omid et al. addressed an optimization model, which maximizes the net benefit of installations in reservoir systems and is employed to design Khersan 1 and 2 power plants in the Khuzestan province of Iran [
26]. A.B. Kanase-Patil et al. used Lingo to solve the integrated renewable energy system (IRES) model with four different scenarios to satisfy the electrical and cooking needs of the seven un-electrified villages in the Almora district of Uttarakhand state, India [
27]. Nilesh et al. applied the Lingo software to the problem of resource allocation in the economic field, established related models, and obtained the best simulation results [
28]. Mohammad et al. proposed an improved model for designing a truck appointment system (TAS) and used Lingo simulation to get excellent results [
29]. In the existing literature, while using Lingo software to solve the corresponding model, the method is only suitable for solving one-dimensional and two-dimensional variables. When the decision variables of the model are three-dimensional or above, e.g., in [
28,
29], the simulation time will be greatly increased, and it cannot be used directly in practical applications. This paper proposes a method to reduce the dimensionality in high-dimensional variables. In addition, in cooperation with Lingo software, the proposed method can interoperate with MATLAB software by importing data in excel and txt files, which will reduce the simulation time.
This paper proposes an improved model, which considers not only the difference in the importance of the target but also the constraints of the time window. In addition, the indicator of reconnaissance reward is added to the proposed model [
30]. Lingo software is used to solve the mission allocation problem which is regarded as a MILP problem. To improve the performance of Lingo software in the proposed model, a dimensionality reduction method is proposed in the simulation experiment. The method can reduce the computational complexity and make it easier to modify the constraints to reflect different intentions.
The remainder of this paper is structured as follows. In
Section 2, the combinatorial optimization model of the multi-UAV mission allocation problem is established. In
Section 3, the dimensionality reduction process of variables in the Lingo software is presented in detail. In
Section 4, numerical simulations are provided to validate the effectiveness of the proposed method. The performance of the proposed method is compared and discussed with some existing methods in
Section 5. The conclusion and possible future research work are shown in
Section 6.
2. Problem Formulation
In this section, an improved model of the multi-UAV reconnaissance mission allocation problem is presented by describing targets and UAVs. While in the previous model of the problem, such as the work in [
4,
5,
9,
10], the time window of the targets and the shortest distance are considered. By considering these factors, this paper makes the reconnaissance mission allocation model closer to the real operational requirement, as well as considering the reconnaissance reward that each target can get. The effect of this plan is measured by the size of the reconnaissance reward.
2.1. Problem Description
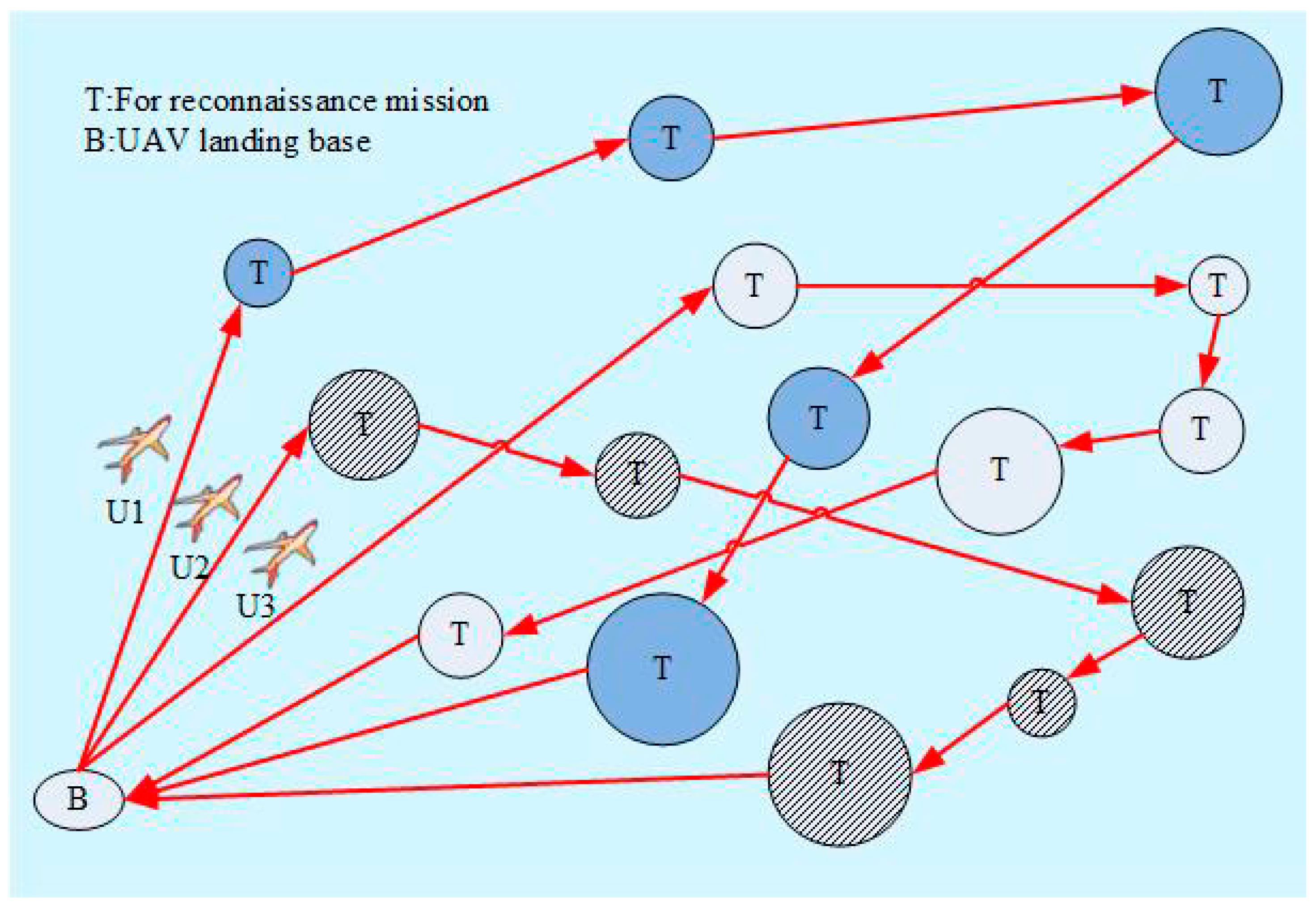
Assume that there are N target areas in the scene that need to be reconnoitered, and we have a base with M reconnaissance UAVs. The coordinates of the target area, the value coefficient, the area size to be reconnoitered and the time window are randomly generated. The flight speed of the UAVs, the maximum flight time, and the maximum reconnaissance time of the reconnaissance sensor are known and fixed. The location of the reconnaissance area, the value factor, the size of the area, and the difference in the required time window all affect the acquisition of reconnaissance reward. They are not independent relationships, but are coupled to each other. The reconnaissance mission uses the overlay search to reconnoiter the specified target area. Target area reconnaissance success or not is related to the reconnaissance time of the reconnaissance area. We set the reconnaissance time to be sufficient for the UAV reconnaissance to cover the target area by 60%. We set the search time to, at least, 60% for the purpose of ensuring a search success rate. And if there is no minimum search success rate, it will result in some target areas not being assigned UAVs to reconnoiter. Therefore, in the case of satisfying various special conditions (such as the total task cannot be greater than a certain time or the total flight time is as small as possible, etc.), the overall reconnaissance reward is maximized [
31,
32]. The schematic diagram of multi-UAVs reconnaissance mission allocation is shown in
Figure 1.
2.2. Reconnaissance Reward Function
Reconnaissance reward means the amount of reward earned by reconnaissance in different target areas. It measures the amount of information acquired and the magnitude of strategic value. According to the different characteristics of the reconnaissance area (including the size of the area, the size of its strategic value, etc.) and the location, our algorithm model will assign the reconnaissance time of the UAV to each area accordingly, so that the reward obtained after the final reconnaissance of all areas will be maximized. This allocation process is also affected by the nature of the performance of the UAV itself, which is actually a compromise maximum after reconciling all contradictions.
It is used to obtain the reconnaissance ratio and reconnaissance reward by the UAV after reconnoitering a certain target for a certain period of time. The function is as follows:
Equation (1) is the reconnaissance reward function, where R(t) represents the reconnaissance reward that can be obtained when the reconnaissance time is t. Here c is the value coefficient, which is a value between [0, 1] determined by the strategic value of the target point. The larger the value of c, the higher the strategic value of the target area and the higher the reconnaissance reword obtained by searching within the area per unit time. Rp is the prior information about the target before reconnoitering, Rq is the information uncertainty need to be reconnoitered, where 0 < Rp < 1, 0 < Rq < 1, Rp + Rq = 1. β is a coefficient representing the efficiency of sensor reconnaissance. In Equation (2) are some parameters that affect β, where w represents the scan width of the reconnaissance sensor carried by UAV, and v is the flight speed of UAV. S is the area to be reconnoitered in the reconnaissance target area.
2.3. Mathematical Model
The improved model of the multi-UAV mission allocation problem is stated as follows:
where
The objective function is to maximize the total UAV reconnaissance reward, where the time and resource are subject to many constraints. Equation (3) is an objective function, which indicates that each target area is maximized by multiplying the reconnaissance reward after the reconnaissance time by the value of the target area. Where xijk is the decision variable and ci is the fixed coefficient that measures the strategic value of each target area. R(tj) is the reconnaissance reward of each target area determined by the decision variable tt. Equation (4) specifies that the total flight time for each UAV to perform missions is less than the maximum flight time of the UAV. Where tijk is the flight time required for the UAV k to fly from the target area i to the target area j, tj is the reconnaissance time allocated by the UAV k to the target area j, and also is the flight time of UAV k flying in the target area j. Tf is the maximum flight time of the UAV k. Equation (5) specifies that the total reconnaissance time of each UAV is less than the maximum opening time of the reconnaissance sensor. Where Tr represents the maximum opening time of the reconnaissance sensor carried by the UAV k. Equations (6) and (7) ensure that each target area can be reconnoitered by one and only one UAV. Where M is number of UAV performing reconnaissance missions. The starting point constraint and ending point constraint are defined in Equations (8) and (9). Where x0jk indicates that the UAV k flies from the base to the target area j, and xi0k indicates that the UAV k flies back to the base from the target area i. Time window feasibility constraints are defined in Equations (11)–(14). Where ai is earliest arrival time, bi is latest arrival time, Ti is arrival time when the UAV reaches the target area i. Equation (11) defines that the time of UAV reached the target area i must be within the time window of target area i. The constraint (12) states that when the UAV k goes from the target area i to the target area j for reconnaissance, the arrival time of j is the sum of arrival time of i, the reconnaissance time of i, the flight time of i to j and the waiting time of target area j. Where Wi is the waiting time required for UAV to reach the target time less than ai. Equation (13) constrained the waiting time. Equation (14) restricts that each UAV goes to the mission target area to ensure that there are sufficient resources to fly back to the base.
3. Solution Based on Lingo Software
Lingo software supplies a built-in modeling language that provides more than a dozen internal functions. It allows decision variables to be integers and is convenient and flexible. Lingo software is convenient to exchange data with Excel, database, and other software.
The strong interactive nature of Lingo software allows us to open Lingo for simulation via MATLAB and presents the results directly in Excel and MATLAB diagrams.
To solve the mathematical model more quickly and efficiently, we reduce the dimension of the decision variable xijk without changing the model. The pseudo-code of Lingo is presented in Algorithm 1.
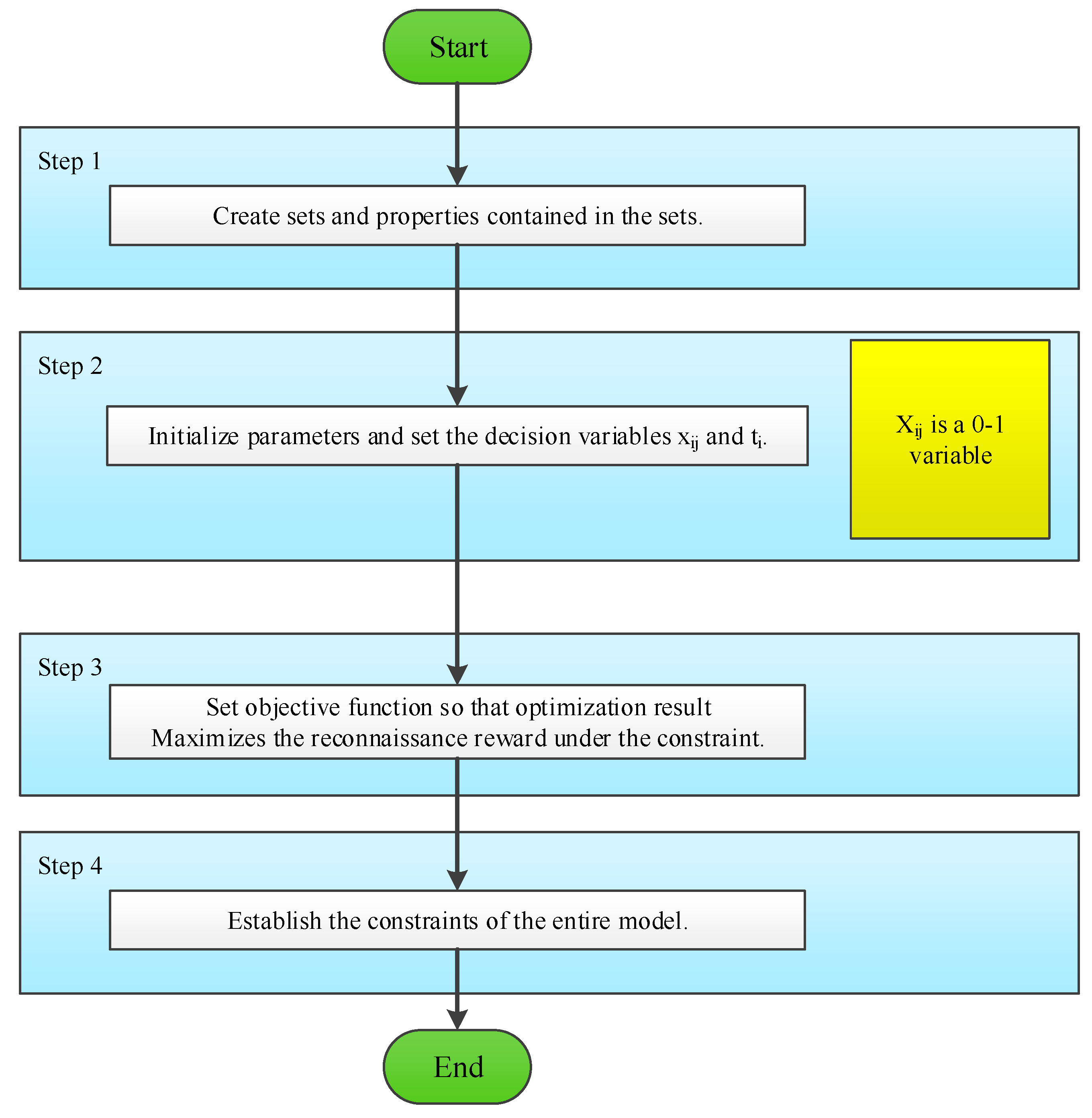
The main steps of the proposed method based on Lingo are shown in
Figure 2.
Step 1. Set up the UAV and reconnaissance mission areas. Then set up a set of links between reconnaissance areas, which is the LINK. The UAV contains attributes v, w, Tf, and Tr. The point contains attributes t, c, R(t), S, T, and W. The LINK contains the attributes dij and xij.
Step 2. Define xij and ti as decision variables. xij is a [0, 1] variable and ti is a positive variable.
Step 3. Set an objective function so that the optimization result will maximize the reconnaissance reward under the constraint.
Step 4. Establish the constraints of the entire model.
In Algorithm 1, u(i) indicates the time when the UAV performing the i-area mission leaves the target area i. h(i) indicates the reconnaissance time when the UAV performing the i-area mission leaves the target area i. ftij is the time required for the UAV to fly from the target area i to the target area j. Decision variable xij is generated after the xijk dimension reduction process in the improved model. By using the characteristics of the Lingo language to make xij get the same result as the xijk solution. To show a simple example, if there is 1 base and 5 areas to be reconnoitered, x13=1, x15=1, x21=1, x32=1, x46=1, x54=1, x61=1 can be got and the rest are 0. Then from x13=1, x15=1, it can be known that there are two UAV taking off from the base, UAV1 goes to the target area 3, and UAV2 goes to the target area 5. From x32=1, x21=1 we obtained that UAV1 continues to go to target area 2 from target area 3 and then returns to the base. Similarly, it can be known that UAV2 moves from target area 5 to target area 6, then goes to target area 4 and returns to the base.
| Algorithm 1 The Lingo for UAV reconnaissance mission allocation problem |
Input: The information of UAV and reconnaissance area
Output: The optimal allocation plan and program details |
1. Create collections and corresponding properties, initialize parameters
2. set the decision variables xij and ti
3. set the objective function
4. for each target k = 1,2,3,…,26, including base
5. constrain all u(k) less than the maximum flight time
6. constrain all h(k) less than the maximum reconnaissance time
7. compute u(k), h(k)
8. define u(k) as the number between intervals (t(k), Tfmax)
9. define h(k) as the number between intervals (t(k), Trmax)
10. for each i, i#ne#k#and#i#ne#1
11. u(k)>=u(i)+t(k)+ft(i,k)-Tfmax+Tfmax*(x(k,i)+x(i,k))-x(k,i)*(t(k)+ft(i,k)+t(i)+ft(k,i))
12. h(k)>=h(i)+t(k)-Trmax+Trmax*(x(k,i)+x(i,k))-x(k,i)*(t(k)+t(i))
13. u(k)<=Tfmax-(Tfmax-t(k)-ft(1, k))*x(1, k)
14. u(k)>=t(k)+@sum((t(i)+ft(i, k))*x(i, k)),where i greater or equal to 1
15. h(k)<=Trmax-(Trmax-t(k))*x(1, k)
16. h(k)>=t(k)+@sum(t(i)*x(i, k)), where I greater or equal to 1
17. end for
18. time window constraint
19. define h(k)-t(k) as the number between intervals (a(k), b(k))
20. if x(k, j)=1,
21. h(k)+ft(k, j)+W(j)=h(j)-t(j)
22. W(j)=max(0,a(j)-(h(i)+ft(i, j)))
23. end if
24. @sum(x(i, j)*h(j))+W(j)+ft(j, 0)<=Tfmax
25. compute x(i, j)=1 in the optimal allocation scheme
26. for any k, x(k, k)=0
27. end for
28. for each i, i#ne#k#and#(i#eq#1#or#u(i)+t(k)+ft(i, k)#le#Tfmax#or#h(i)+t(k)#le#
29. Trmax), limit sum of x(i, k) to 1
30. end for
31. for each j, j#ne#k#and#(j#eq#1#or#u(j)+t(k)+ft(k, j)#le#Tfmax#or#h(k)+t(j)#le#
32. Trmax, limit sum of x(k, j) to 1
33. end for
34. end for |
4. Simulation Results
In this section, three simulation experiments to illustrate the method of Lingo software and the improved model are presented. The simulation results show the advantages of the new model with respect to the strategic intention expression and resource utilization scenarios. For each simulation experiment, we performed 10 simulations separately and selected the best data for display. All simulation experiments are performed on an computer with Intel
® Core
™ i5 CPU, 2.3 GHz, 4.00 GB of RAM (Intel Corporation, Santa Clara, CA, USA). In the combat mission scenario, there are five UAVs with the same properties, where the flight speed is 260 km/h, and the scan width of reconnaissance sensor is 0.3 km. The maximum flight time of the UAV is 18 h and the maximum opening time of the reconnaissance sensor is 6 h. There are 25 target areas to be reconnoitered and randomly distributed in an area of 1000 × 1000 square kilometers. Specific target area parameters are shown in
Appendix A Table A2.
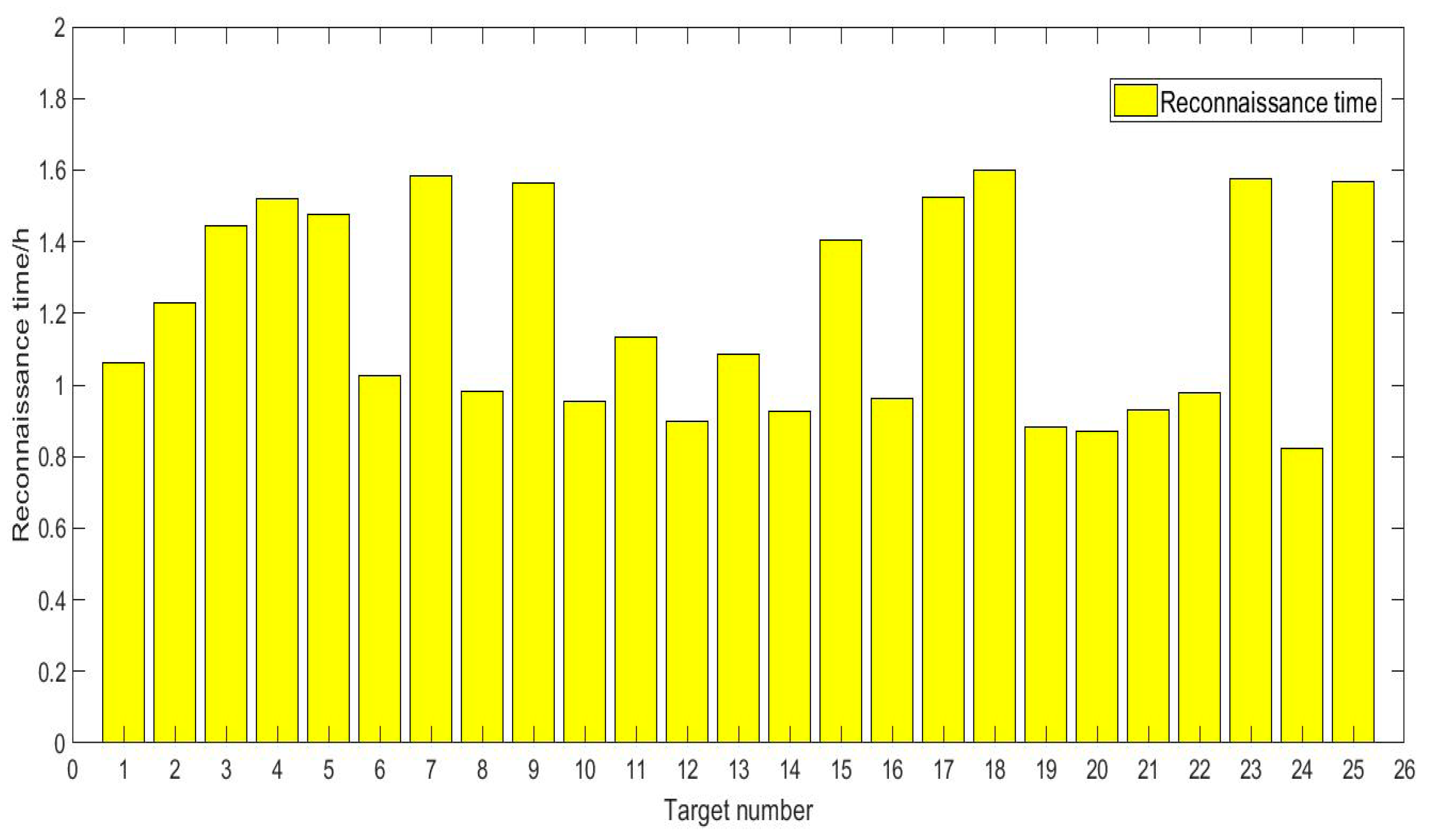
Appendix ATable A3 shows the reconnaissance time allocation for each target area in the optimization scheme and the corresponding reconnaissance reward and reconnaissance ratio obtained. The minimum scouting rate is limited in the reconnaissance area with a number of 60%. It can be found that a large proportion of the value coefficient affects the reconnaissance ratio of the mission. The bar chart of the reconnaissance time allocation is shown in
Figure 3. A bar chart comparing the value coefficient of each reconnaissance area with the reconnaissance reward is shown in
Figure 4.
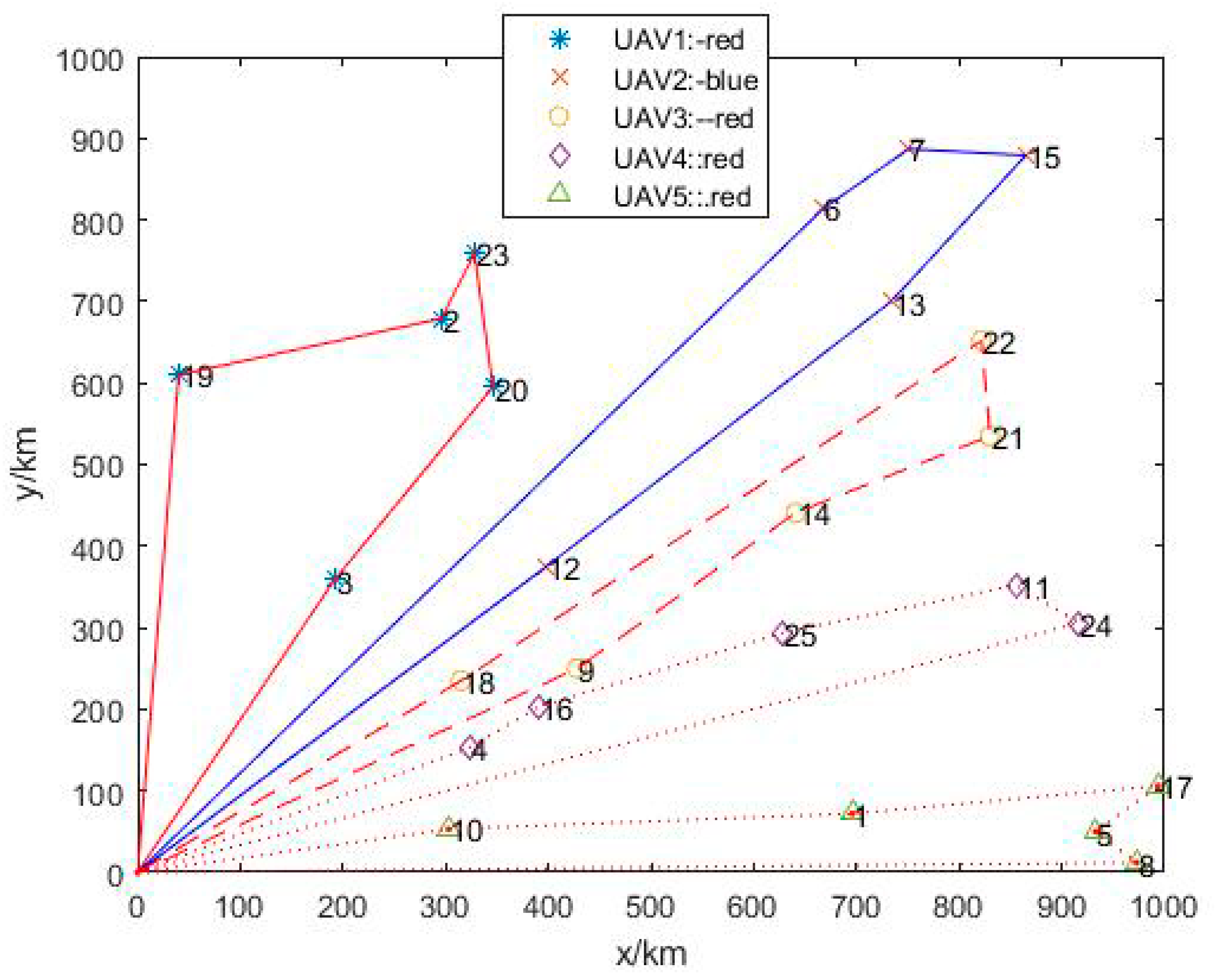
Table 1 shows assignment status of each UAV. Each UAV is assigned five reconnaissance areas with a total reconnaissance duration of 6 h. Due to the time window, UAV1 flies to the reconnaissance target 23, and it waits for 1.5342 h to start reconnaissance. UAV4 flies to the reconnaissance target 25, and it waits for 0.665 h to start reconnaissance. The total time of the entire operational plan is the time when the last UAV returned to the base, for which the flight time of UAV2 is 15.6689 h. The total reconnaissance reward is 12.4338, while the total flight duration is 72.5758 h. It can be seen from
Table 1 that even with the distribution of reconnaissance tasks under the time window, the method we use can ensure that multiple UAVs allocate time as evenly as possible. The total flight of each drone is controlled within 14 to 16 h, and can be found in conjunction with
Figure 5, the flight path of the drone is also reasonable and efficient. The flight path of the final plan is shown in
Figure 5.
The whole simulation process takes 4.3 s. The same model is simulated by genetic algorithm (GA) and non-dominated sorting genetic algorithm with elite strategy (NSGA-II). The central idea of the genetic algorithm is to select, cross, and mutate the genetic population composed of a certain number of individuals, and finally, obtain the optimal solution or approximate optimal solution. When performing genetic operations, several important parameters are as follow: chromosome length L, population size M, crossover probability Pc, mutation probability Pm, and termination generation G. In this simulation experiment, Pc = 0.4 and Pm = 0.1. The basic operation process of the genetic algorithm is as follow:
(a) Initialization: Set the evolution algebra counter gen = 0, set the maximum evolution algebra G, and randomly generate M individuals as the initial population P(0).
(b) Individual evaluation: Calculate the fitness of each individual in the population P(gen).
(c) Select the operation: Apply the selection operator to the group. The purpose of the selection is to directly infer the optimized individual to the next generation or to generate a new individual through pairing to regenerate to the next generation. The selection operation is based on the fitness assessment of the individual in the group.
(d) Crossover operation: The crossover operator is applied to the population. The core function of genetic algorithms is the crossover operator.
(e) Variation operation: The mutation operator is applied to the population. That is, changes in the gene values at certain loci of individual strings in a population. The population P(gen) is subjected to selection, crossover, and mutation operations to obtain the next generation population P(gen+1).
(f) Termination condition judgment: If gen = G, the individual with the greatest fitness obtained during the evolution process is used as the optimal solution output, and the calculation is terminated.
The corresponding program flow chart is shown in
Figure 6.
The basic idea of the NSGA-II algorithm is as follows: First, the initial population of size N is randomly generated. After the non-dominated sorting, the first generation of the population is obtained by the three basic operations of selection, crossover, and mutation of the genetic algorithm. Second, at the beginning of the generation, the parent population is merged with the offspring population, and the fast non-dominated sorting is performed. At the same time, the crowding degree is calculated for each individual in the non-dominated layer, and the appropriate individual is selected according to the non-dominated relationship and the individual crowding degree to form a new one. The parent population; finally, the new progeny population is generated by the basic operations of the genetic algorithm: and so on, until the condition of the end of the program is met. The NSGA-II algorithm will be improved in the following areas:
1. Fast non-dominated sorting
When NSGA performs non-dominated sorting, each individual in a population of size N is compared against M objective functions and N-1 individuals in the population, with a complexity of O(MN), so N in the population. The complexity of the individual end comparison is O(MN2), that is, the time complexity of each pareto grading is O(MN2). In the worst case, each pareto level contains only one individual, and the time complexity required to perform N gradings increases to O(MN3). In view of this, a fast non-dominated sorting method is proposed in the paper, and the time complexity of this method is O(MN2). The algorithm needs to save two quantities: (1)The number of dominations np. This amount is the number of individuals who can dominate the individual p in the feasible solution space. (2) The SP is controlled by the individual. This quantity is a collection of all individuals in the feasible solution space that are dominated by individuals p.
2. Retention of individual diversity in the population
In NSGA-II, a crowding algorithm and an elite strategy are used instead of the shared function algorithm.
3. The main part of the loop
(1) Randomly initialize the starting population P0. The non-dominated sorting of P0 is performed to initialize the rank value of each individual; (2) t = 0; (3) Select individuals from Pt through the binary tournament method, and perform crossover and mutation operations to generate a new generation population Qt; (4) Calculate the obj value of the new population; (5) By combining Pt and Qt, a combined population is generated; (6) Non-dominated sorting of Rt, and selecting N individuals by crowding out and elite retention strategies to form a new generation population Pt + 1; (7) Jump to step 3 and cycle until the end condition is met.
The corresponding program flow chart is shown in
Figure 7.
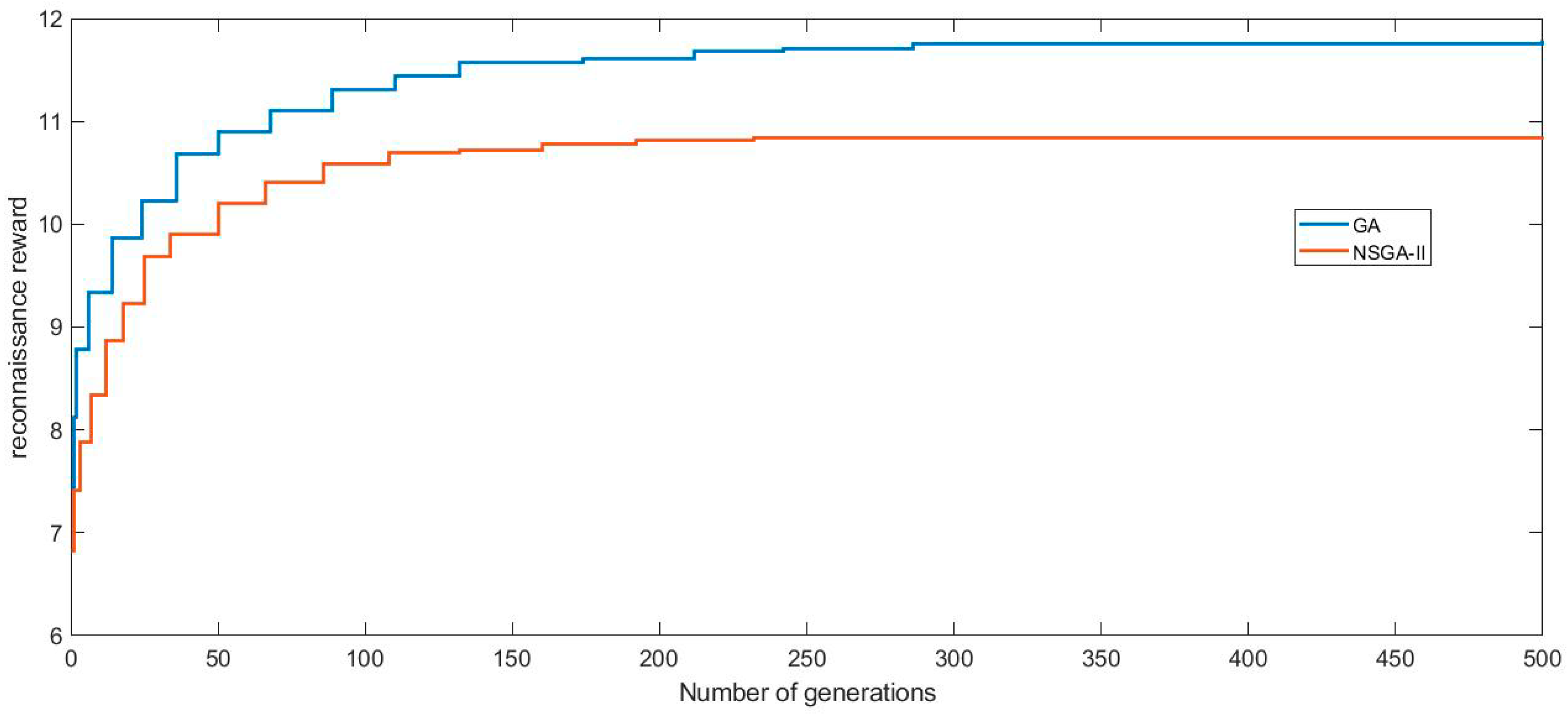
In the case of population size 300 and 500 iterations, NSGA-II takes 32.8 s to obtain reconnaissance reward of 11.7845, and the total flight duration is 72.2369 h. GA takes 16.2 s to obtain reconnaissance reward of 10.8531 and the total flight duration is 78.6358 h.
Figure 8 shows convergence trace of GA and NSGA-II and
Table 2 shows a comparison of the results obtained by the three methods. It is easy to find that in the final simulation results, each UAV can obtain the reconnaissance reward as much as possible while satisfying various constraints, and the flight path is as short as possible.
Table 3 shows the five sets of simulation data for the three methods. The results shown in
Figure 3,
Figure 4 and
Figure 5 are the optimal allocation results under all constraints, the total flight time is 72.5758 h, and the reconnaissance reward is 12.4338. From the data, we can see that the Lingo and NSGA-II methods are more stable than the GA algorithm, and the decision results obtained are more effective. Compared with the data of Lingo and NSGA-II, it can be seen that Lingo has obvious optimization in reconnaissance reward and optimization time, which is slightly higher than NSGA2-II algorithm in total flight time index.
5. Discussion
As shown in the simulation results mentioned above, the simulation time of the proposed method is 4.3 s, NSGA-II needs 32.8 s, and GA needs 16.2 s. The new method used a total flight distance of 72.5758 km to obtain a reconnaissance reward of 12.4838, NSGA-II used a total flight distance of 72.2369 km to obtain a reconnaissance reward of 11.7845, and GA used a total flight distance of 78.6538 km to obtain a reconnaissance reward of 10.8531. The results show that the new method is much better than the genetic algorithm in terms of speed and results. Compared with the NSGA-II, although the total flight time is slightly increased, the overall reconnaissance income obtained is much higher than that of the NSGA-II, and the simulation time is much less than the NSGA-II. From the aspects of waiting time and the total flight time of each UAV presented in the experimental results, the waiting time appears in those UAVs with less flight time, so that the total flight time of each UAV is relatively balanced. The superiority of the proposed method is achieved by modeling the reasonable constraints on resources and the quality of the overall task.
Compared with the previous studies, the proposed model is closer to the actual needs of reconnaissance missions by taking into account the various attributes of different reconnaissance areas, thus, to allocate different reconnaissance time. At the same time, combining time window constraints with the balanced allocation of UAV resources makes the final allocation more balanced and more in line with actual operation needs. Based on reducing the dimensionality of high-dimensional variables, as well as combining with Lingo software, which can interoperate with MATLAB software through excel and txt flies, the proposed method reduces the simulation time.
During the simulation, we set the settings that each reconnaissance mission area must reach, and the reconnaissance coverage area must be greater than 60%. However, it should be noted that the models and methods we use are generic. In the absence of this setting and insufficient resources, the final decision result will be assigned to the reconnaissance time of some areas 0 and will not go to the area for reconnaissance. The methods and models that we have proposed are not limited to the resolution of reconnaissance missions. For similar problems, such as search and rescue problems, UAV distribution problems in urban life, etc., by changing the corresponding constraints and the meaning of the variables, the proposed method can be applied.
6. Conclusions and Future Works
An improved model of the multi-UAV mission allocation problem is presented, which considers time windows, reconnaissance reward, target heterogeneity, and reconnaissance resource allocation. The novelty of the model is mainly reflected in the following three aspects:
1. We apply the concept of scouting income to the model and use it as a decision-making indicator to measure the pros and cons of the final decision;
2. The emergence of reconnaissance income makes the importance of each target area fully reflected and more in line with actual needs;
3. Based on considering the above two points, we add time constraints, making the whole model closer to actual operational needs.
The optimization objective is that the flight path should be as short as possible, and the reconnaissance reward should be maximized. The applications in Lingo software can quickly and efficiently solve the improved model. The proposed model is applicable to other software, such as MATLAB (The MathWorks, Natick, MA, USA) and Python (Guido van Rossum, Netherlands). But what we need to emphasize is that we have implemented some processing for the model in the simulation process, which has made the simulation faster and more efficient. The models and methods we propose are common to task assignment-related issues. The proposed model can be more in line with actual needs. Based on guaranteeing time constraints and benefit constraints, it can make the time of each task-executing task more balanced, which makes the collective resource allocation and task completion efficiency greatly improved.
For future work, it will be widely followed on the further heterogeneity of the combat mission area and the online redistribution of tasks. Different reconnaissance strategies will be adopted for different combat mission areas, and further consideration will be given to coordinating reconnaissance missions by multiple UAVs.
It should be noted that the Lingo software can perform simulation operations separately. However, with the help of MATLAB software, MATLAB can directly call the Lingo API, and the two interact through the txt file. It can make a simulation process, subsequent drawing, tabulation, and result analysis be more convenient. In the follow-up study, we will consider the decision-making optimization under different intents, once the strategic intent is determined, different Lingo modules can be directly called to obtain the optimization result quickly.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







