Multi-Criteria Decision Making for Efficient Tiling Path Planning in a Tetris-Inspired Self-Reconfigurable Cleaning Robot

 ,
,
Abstract
1. Introduction
- Alternatives represent the different choices available to the decision maker. Usually, the set of alternatives is assumed to be finite.
- Criteria represent the different factors on the basis of which the alternatives can be investigated.
- Importance factors (weights of importance) are considered as a measure of the significance of each criterion in the decision-making process. Usually, these weights are normalized to add up to one. It is also assumed that the decision maker has determined the weights of the decision criteria based on relative significance.
- Classification based on the number of decision makers: Single vs. group MCDM [21].
- Classification based on the approach applied on the data: The WSM (Weighted Sum Model) or SAW (Simple Additive Weighting), WPM (Weighted Product Model), AHP (Analytic Hierarchy Process), revised AHP, ANP (Analytic Network Process), TOPSIS (Technique for Order Preference by Similarity to Ideal Solution), ELECTRE (Elimination and Choice Translating Reality), PROMETHEE (Preference Ranking Organization Method for Enrichment Evaluations); VIKOR (VlseKriterijumska Optimizacija I Kompromisno Resenje), and LINMAP (Linear Programming for Multidimensional Analysis of Preference) are the methods which are of more use in practice [17,18,22].
- In this study, energy consumption is considered as a second significant performance metric in tiling path planning.
- This paper proposes an energy estimation scheme for the novel self-reconfigurable robotic platform.
- The current work suggests the optimal path-planning approach by means of MCDM, i.e., creating an optimal balance between maximum area coverage and minimum energy. In other words, however the tiling-theoretic path planning approach is introduced in [13,14], this paper goes beyond previous works to some degree by taking into account the energy factor and aims at adding some optimality utilizing MCDM.
- In addition, in this study, a more recent tiling theorem has been utilized that is not investigated in previous studies [13,14] and surprisingly, based on simulation results, this specific theorem (here illustrated as Theorem 1 [27]) turns out to be the most-promising tiling theorem that can best serve all the areas targeted for optimal cleaning.
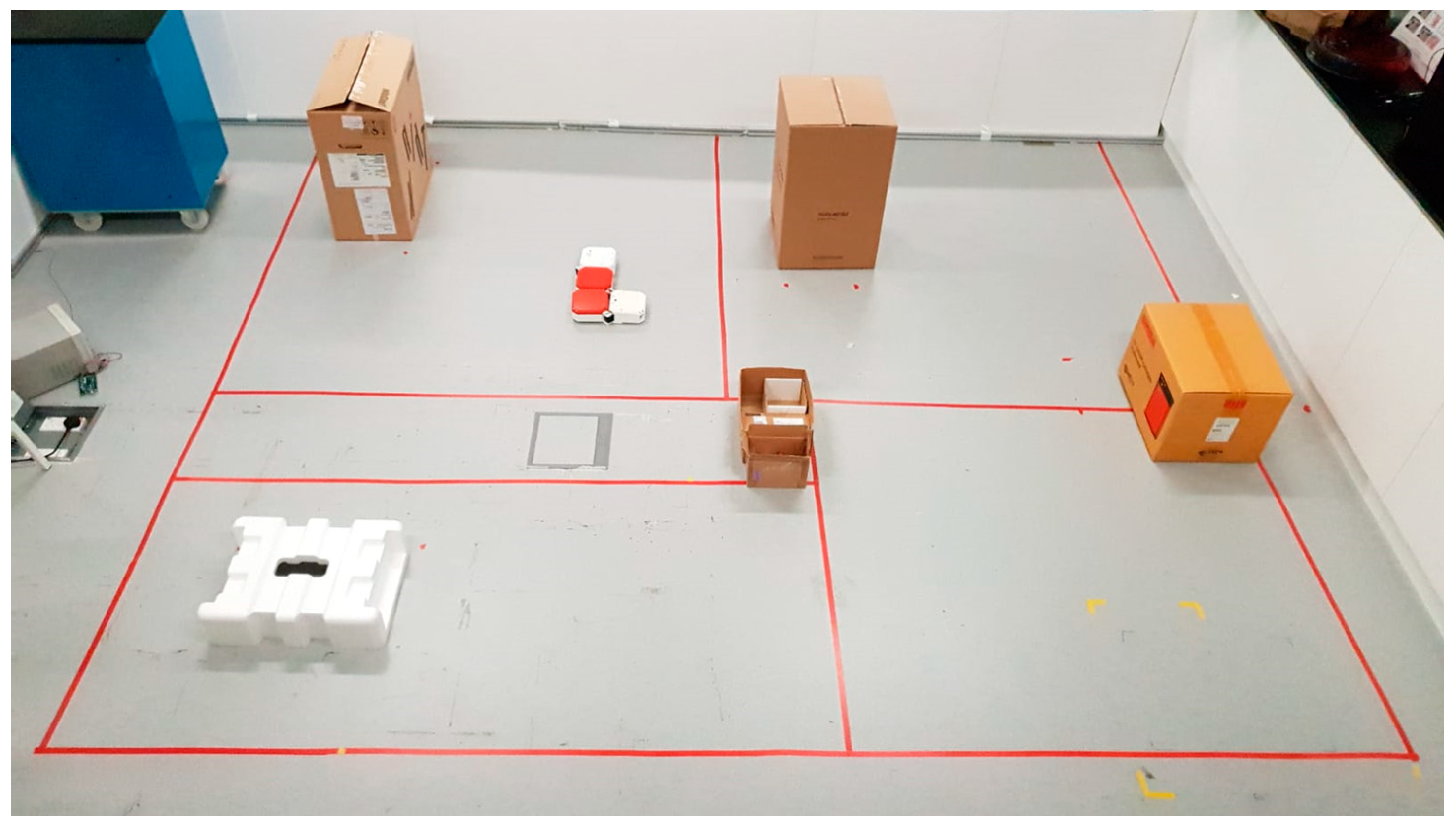
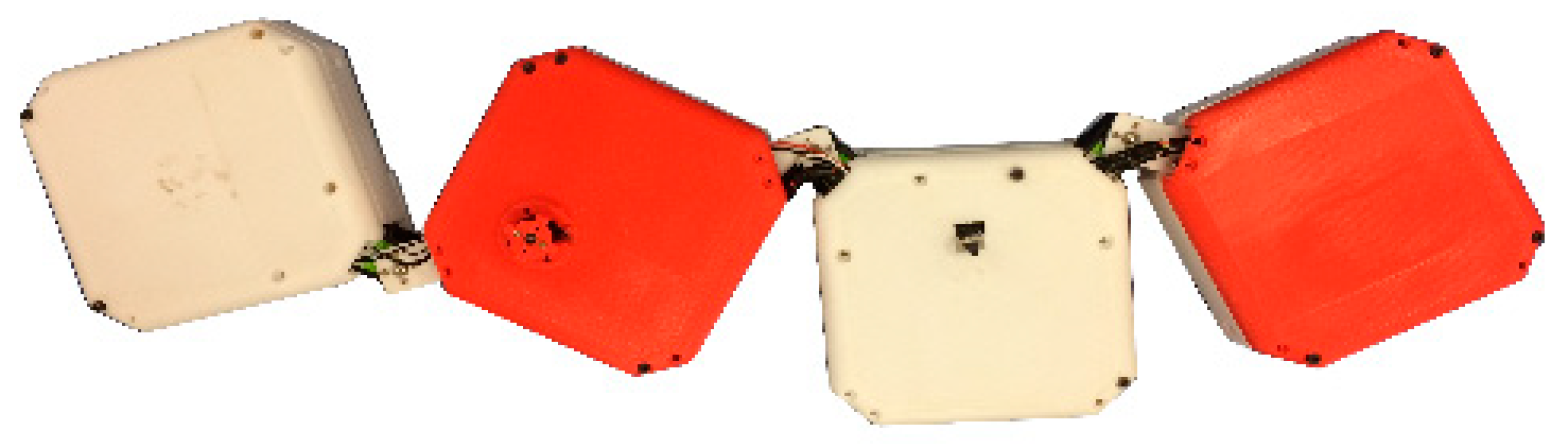
2. An Overview of the Experimental Environment
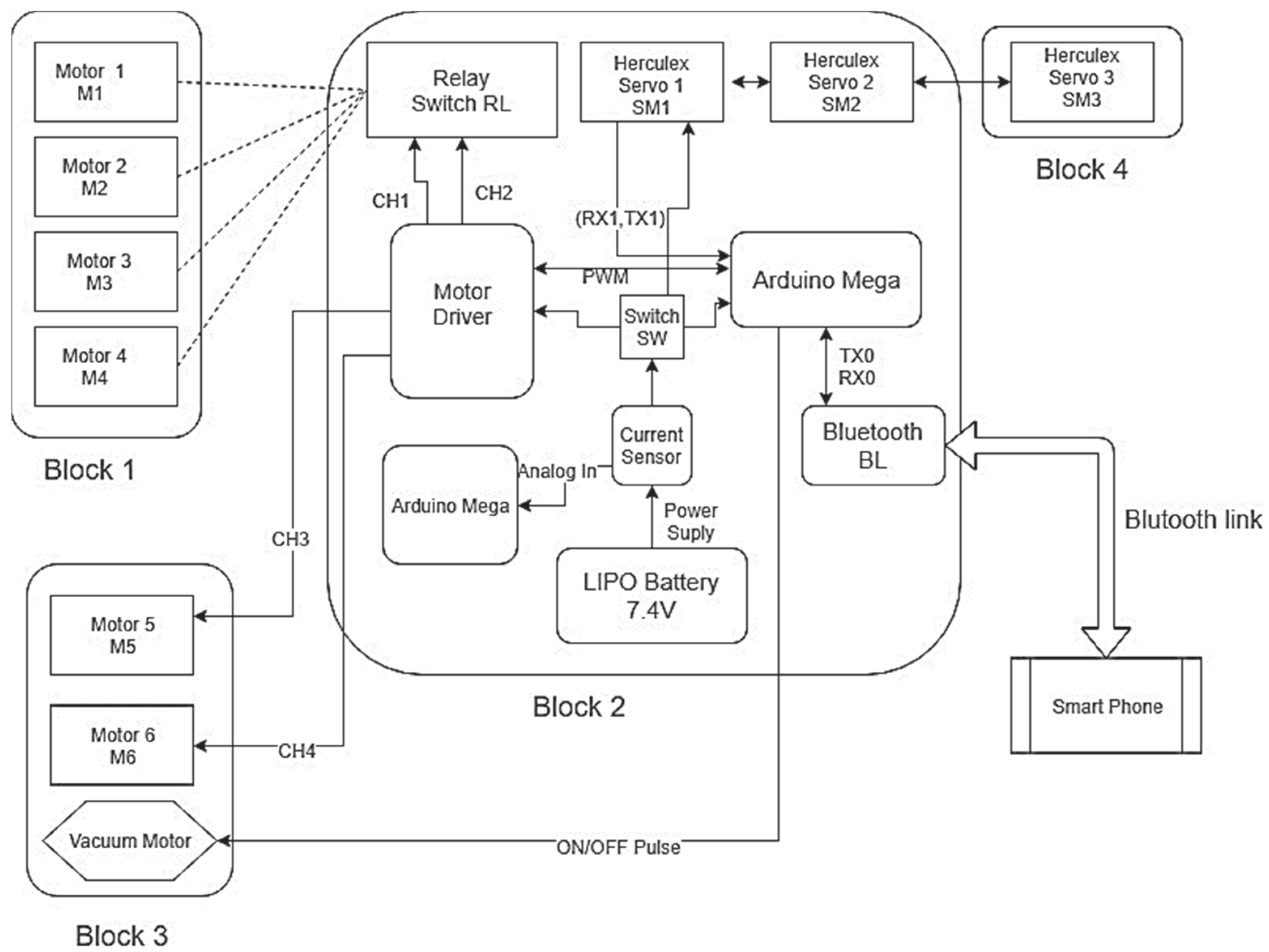
- Receiving the command from the user by means of a smartphone which is connected wirelessly through a Bluetooth serial communication protocol. Arduino uses UART (Universal Asynchronous Receiver-Transmitter) for this communication.
- Generating control signals to the motor driver which controls multiple DC motors; in addition, using PWM (Pulse Width Modulation), it controls the speed of the motor by providing the required current for the motor to run.
- Establishing full duplex serial communication with the servomotors where Arduino sends the control signals to the servo motors and simultaneously receives feedback from them.
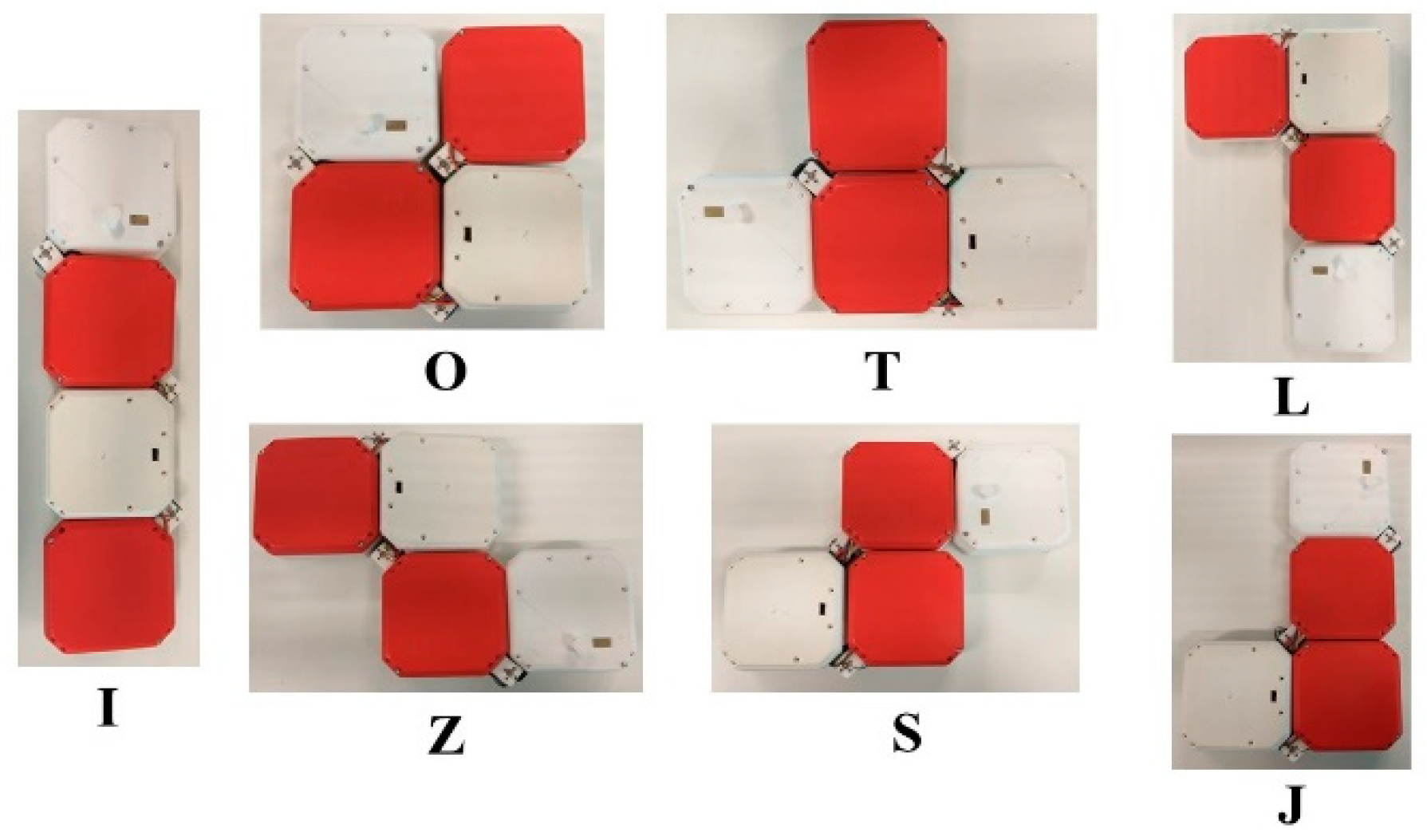
3. Polyomino Tiling Theory Applied to Our Robotic Platform
3.1. Elaborating on the Applied Tiling Theorems
- One side is divisible by 4,
- a, b ≡ 2 (mod 4) and a + b > 16.
- a ≡ 2 (mod 4) and b is odd,
- b = 2 and a ≡ 1 (mod 4)
- a and b are odd and the rectangle is sized (2n + 1) × (2n + 1) when n ≥ 1, and,
- The missing cell in the deficient rectangle will have
- odd coordinates if the rectangle is sized (4m + 1) × (4m + 1) when m ≥ 1, or
- even coordinates if the rectangle is sized (4m + 3) × (4m + 3) with m ≥ 1.
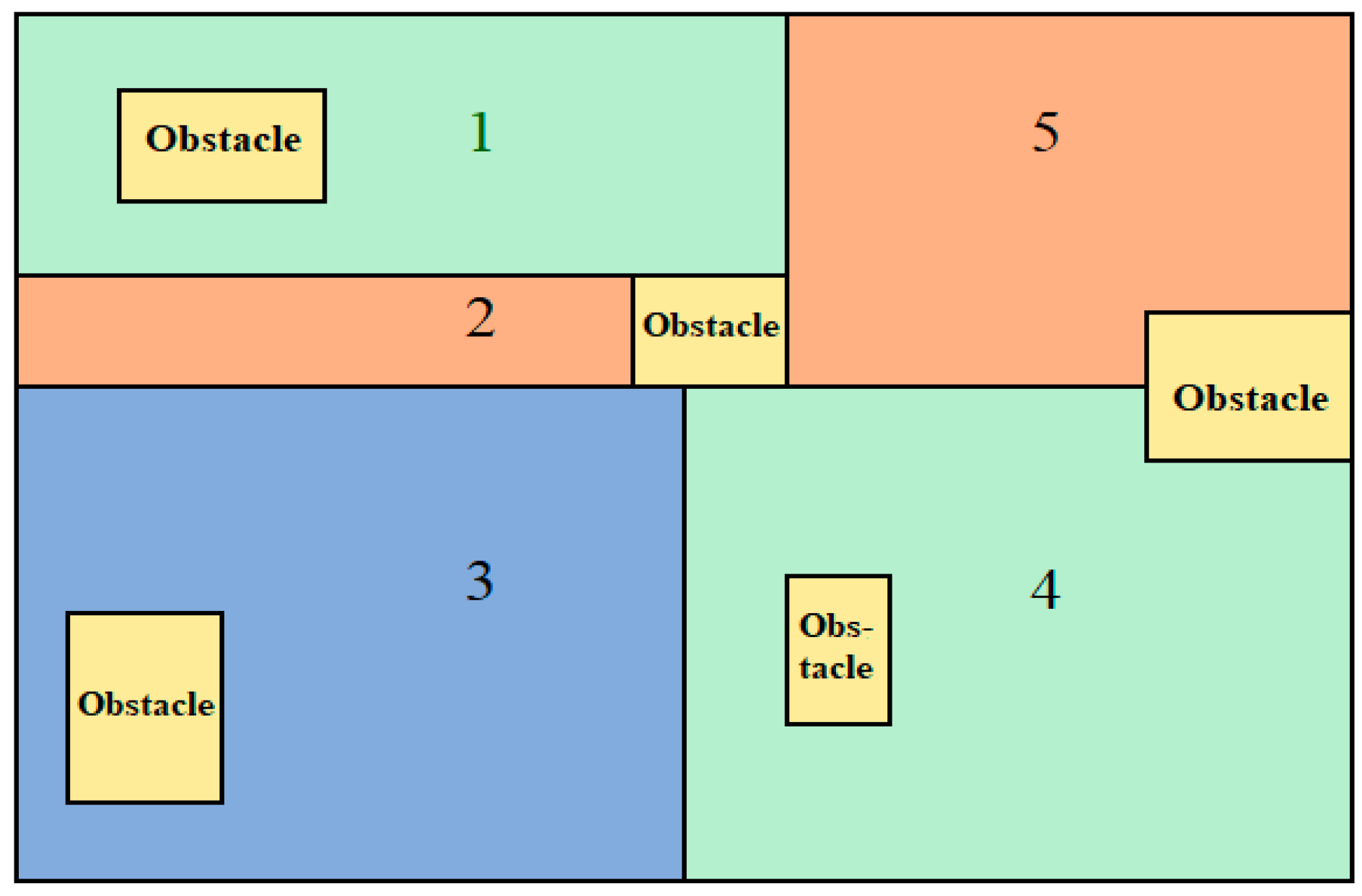
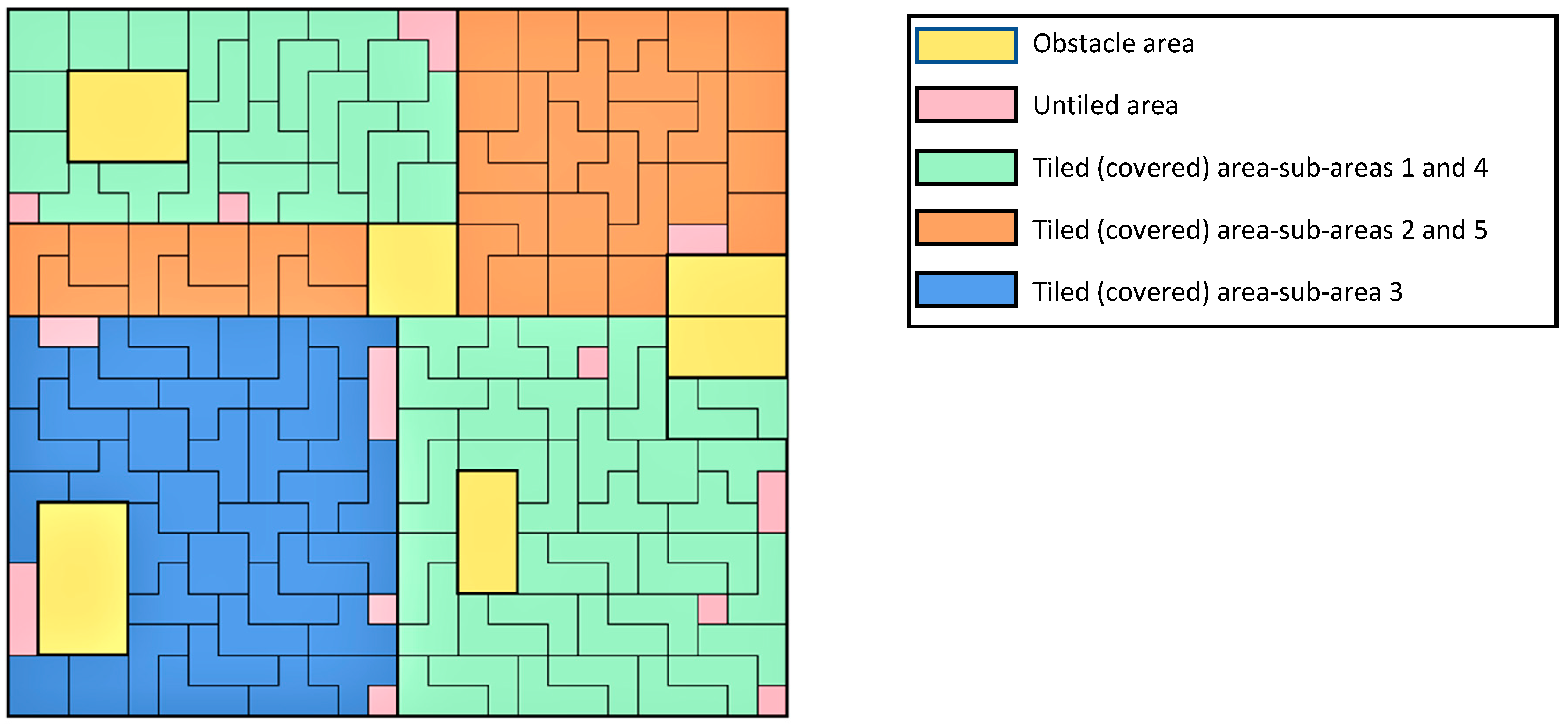
3.2. Area Decomposition Based on Furniture Layout
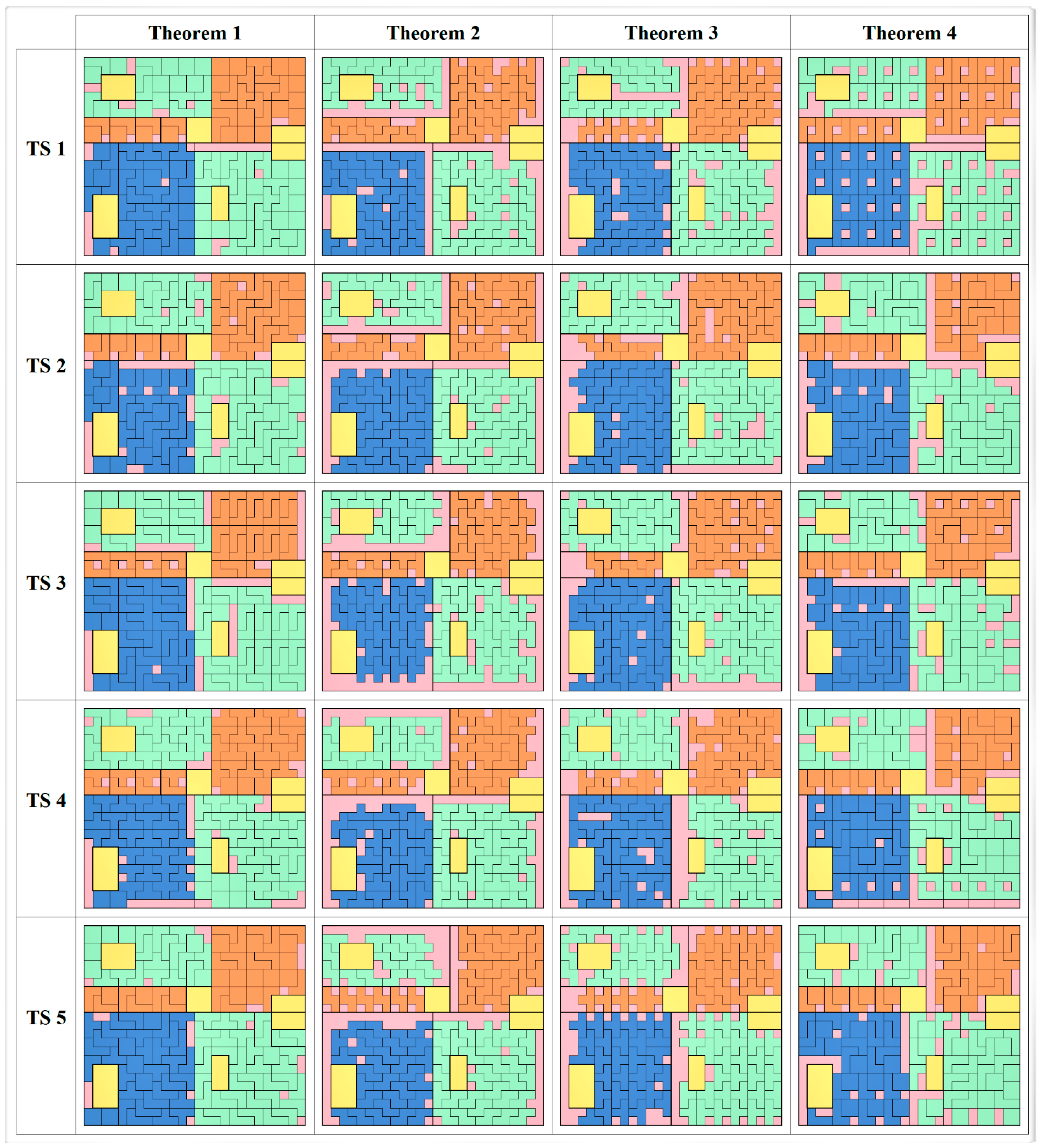
3.3. The Resulting Tiling Sets (Navigation Strategies)
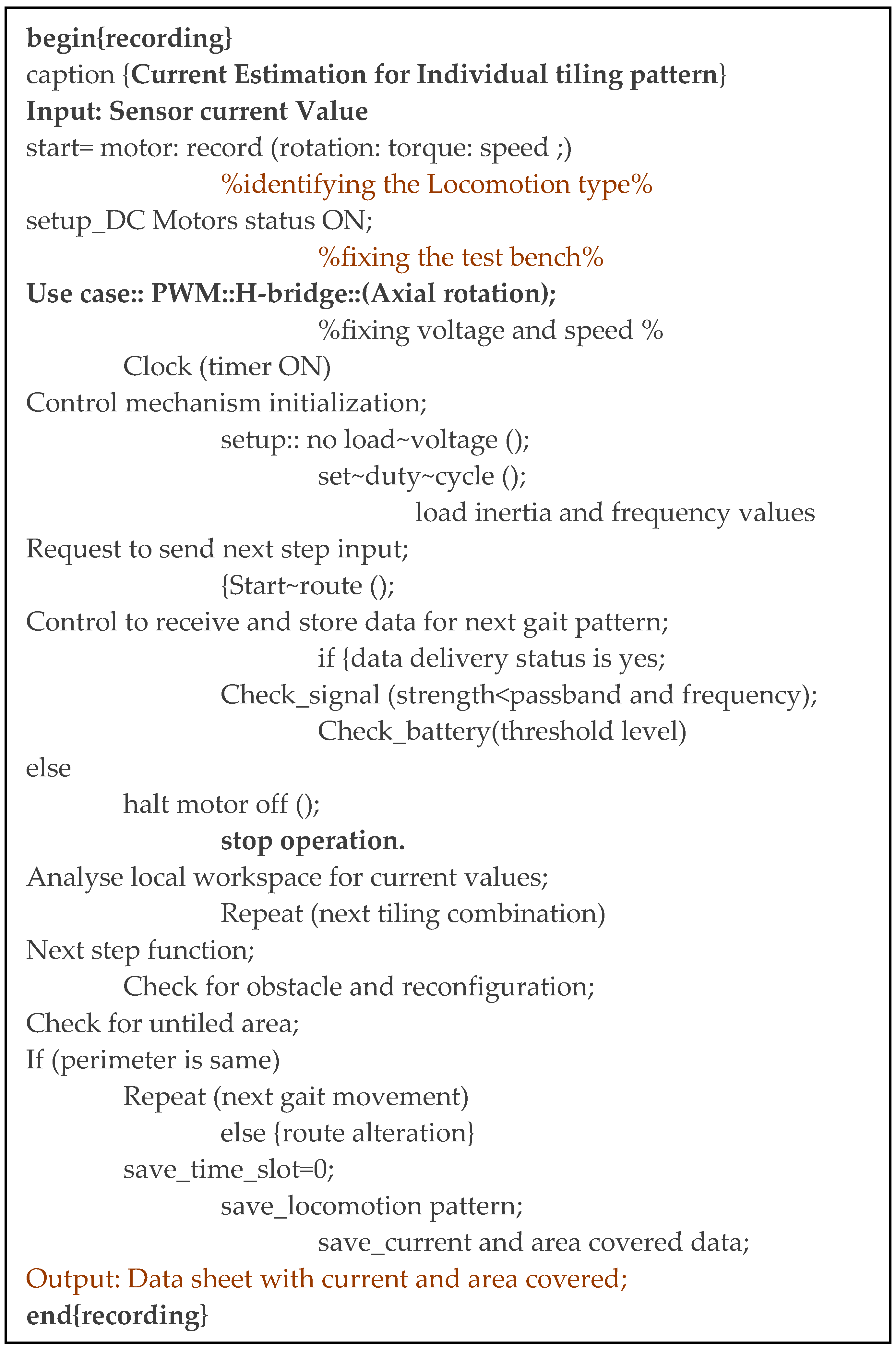
4. Extracting the Data for Area Coverage and Energy
5. Multi-Criteria Decision Making
5.1. Simple Additive Weighing (SAW) Method—A Very Brief Review
5.2. SAW Concepts Applied to Tiling-Based Path Planning
6. Result Analysis and Discussion
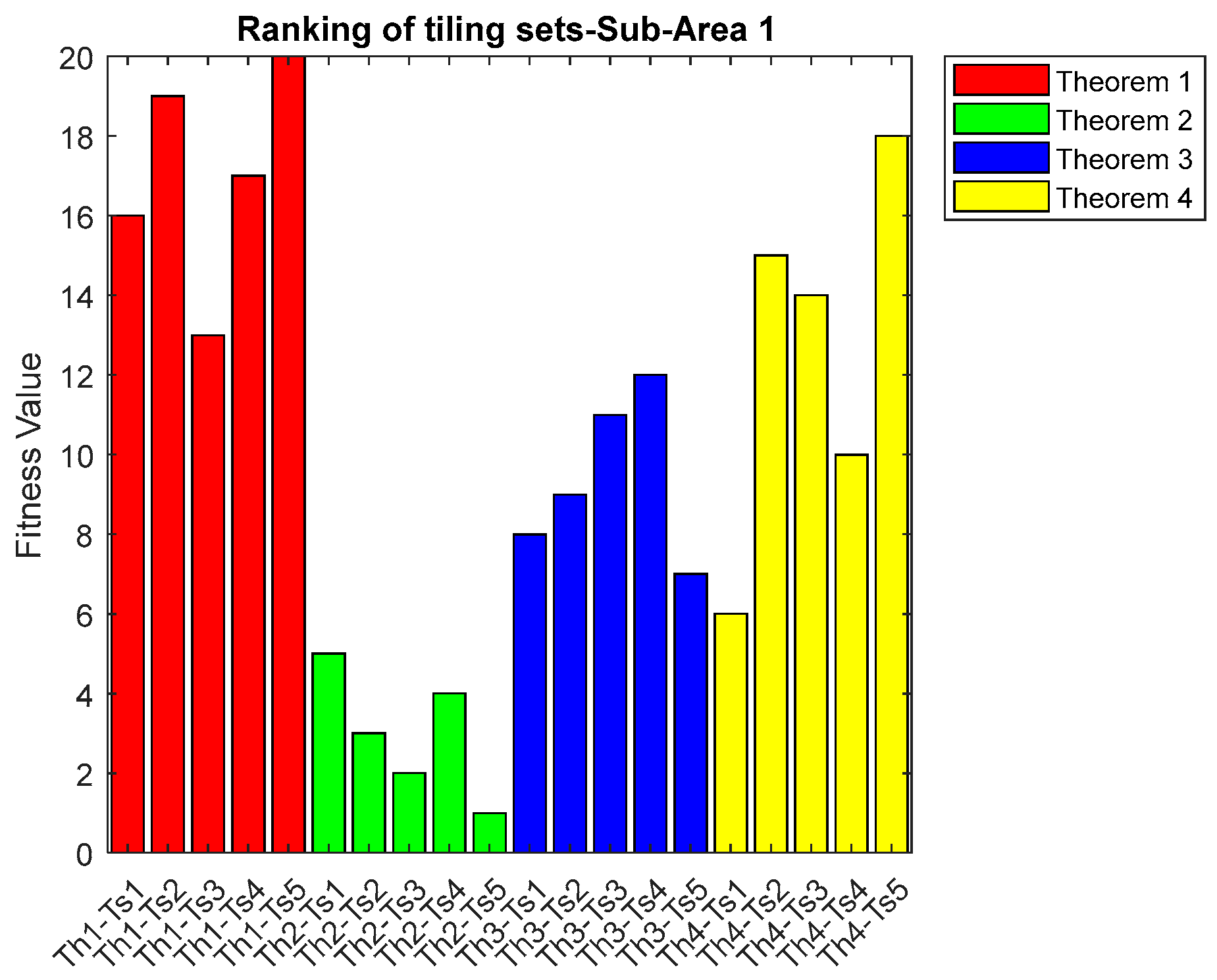
- For sub-area 1: Theorem 1 > Theorem 4 > Theorem 3 > Theorem 2
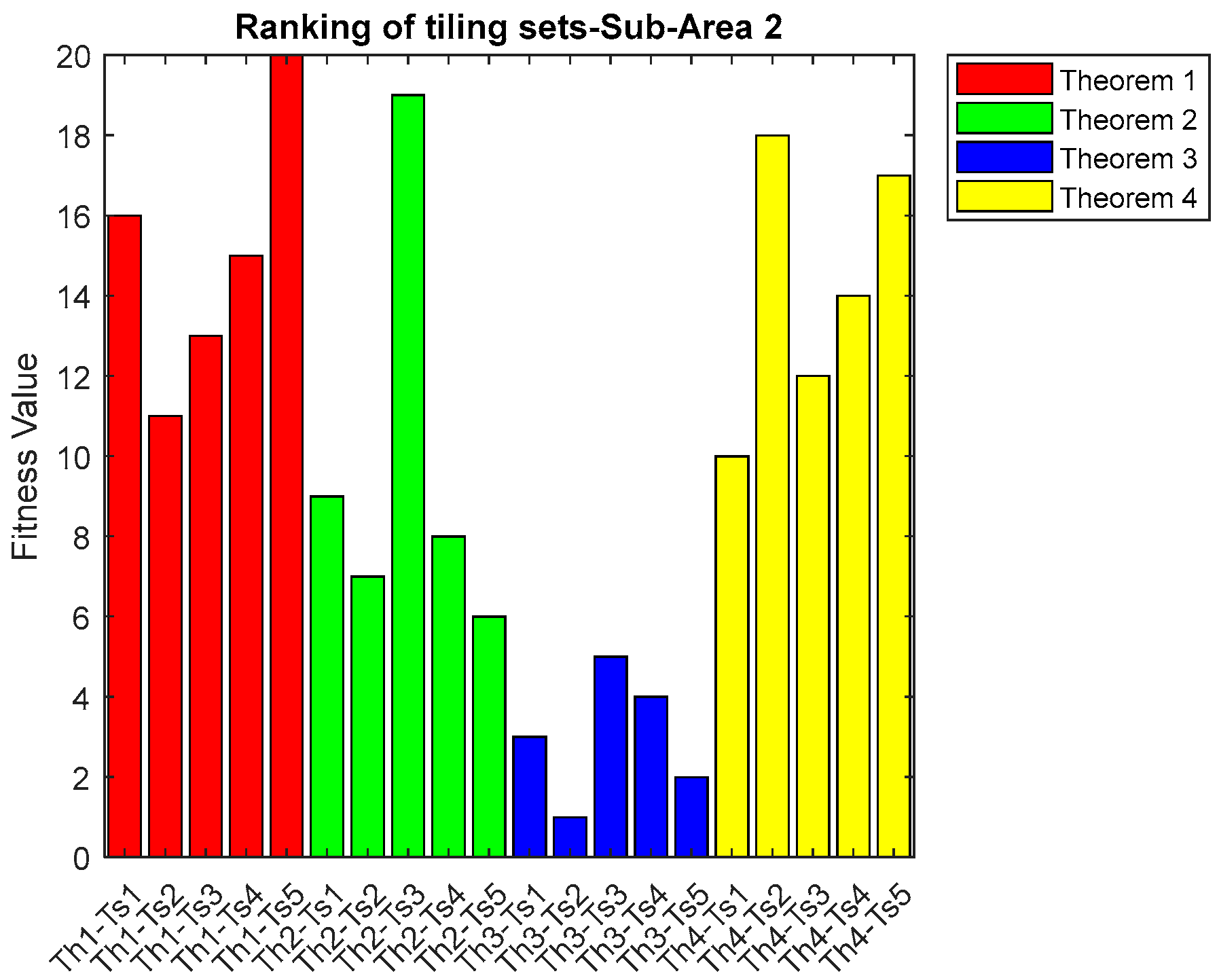
- For sub-area 2: Theorem 1 > Theorem 4 > Theorem 2 > Theorem 3
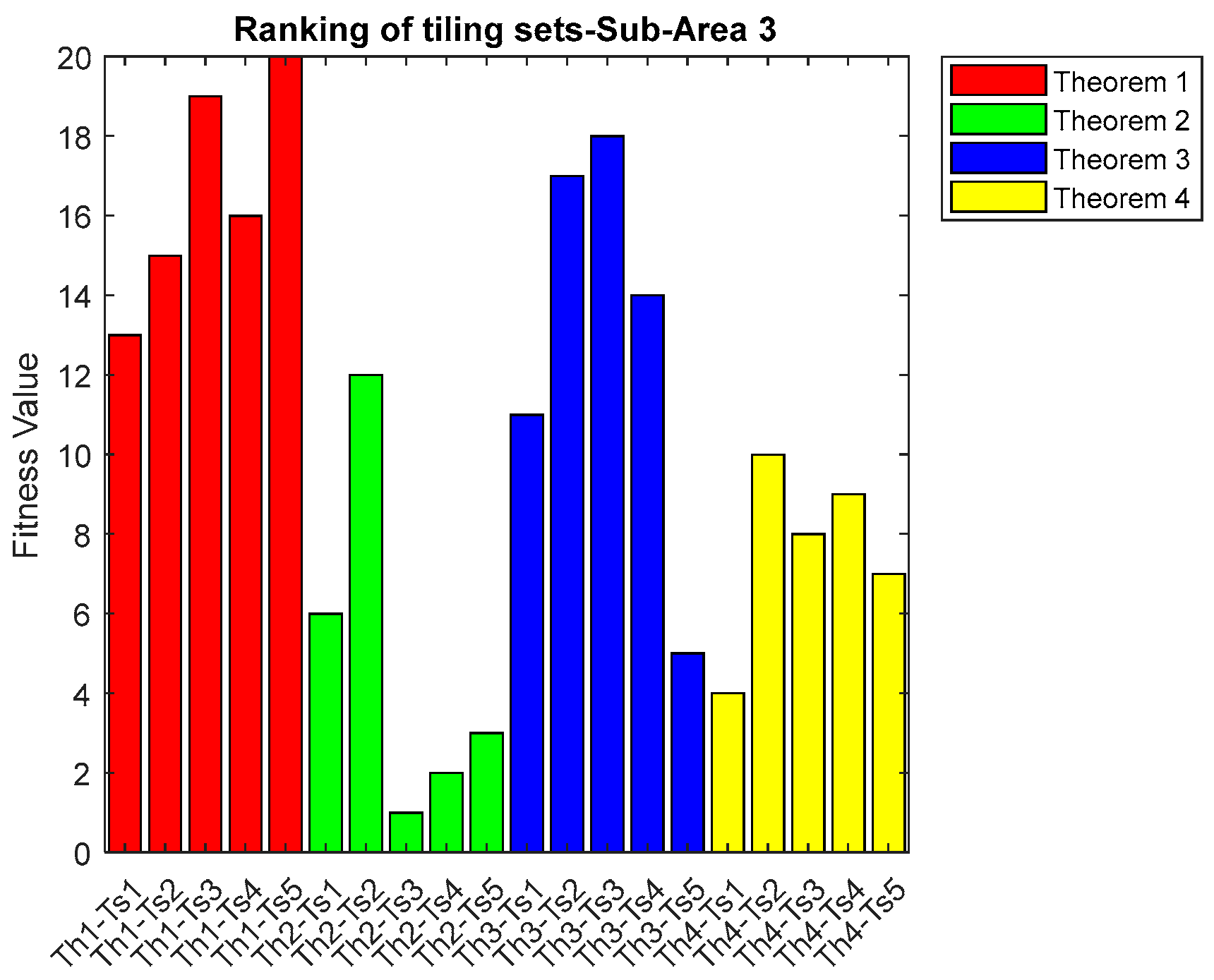
- For sub-area 3: Theorem 1 > Theorem 3 > Theorem 4 > Theorem 2
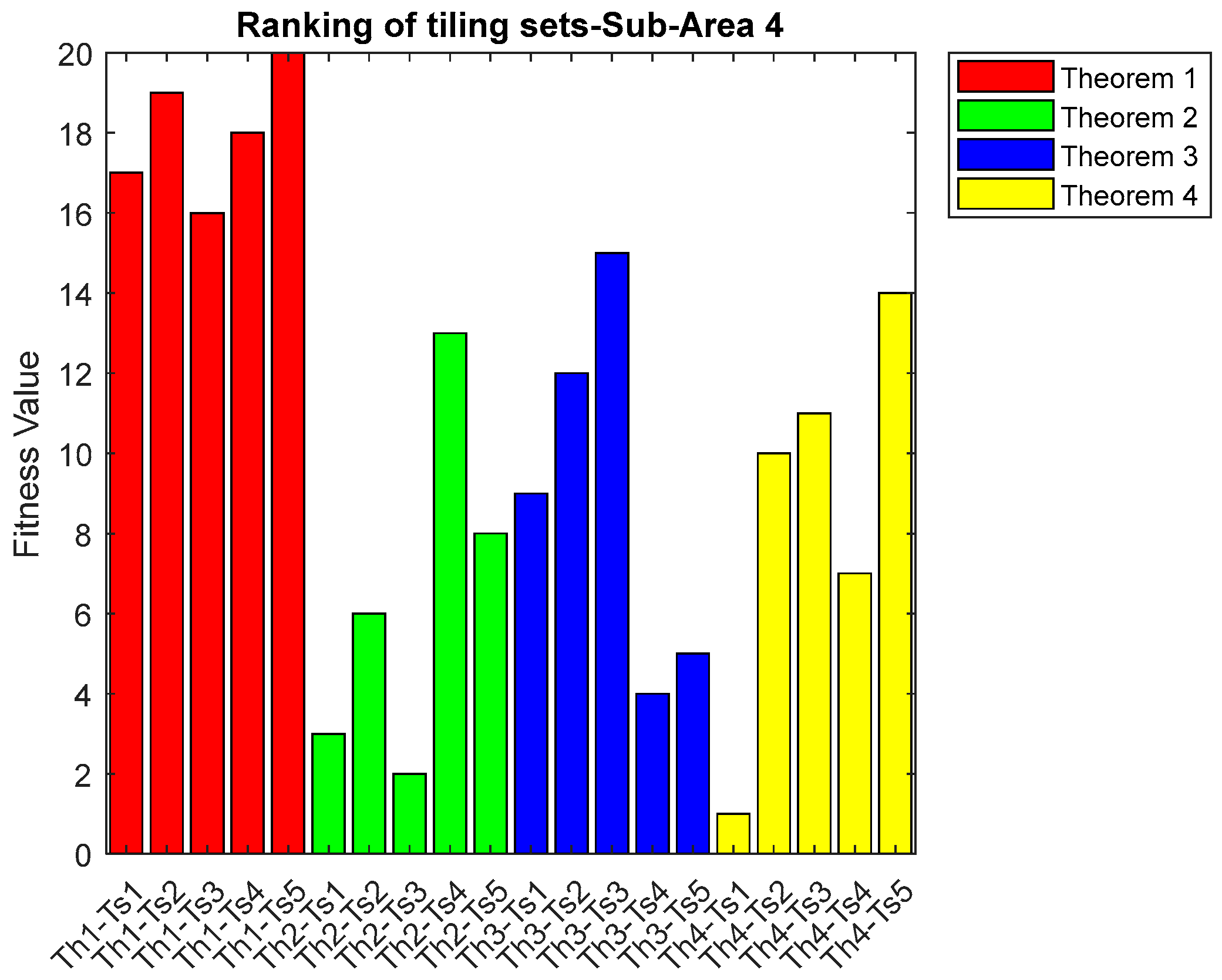
- For sub-area 4: Theorem 1 > Theorem 3 > Theorem 4 > Theorem 2
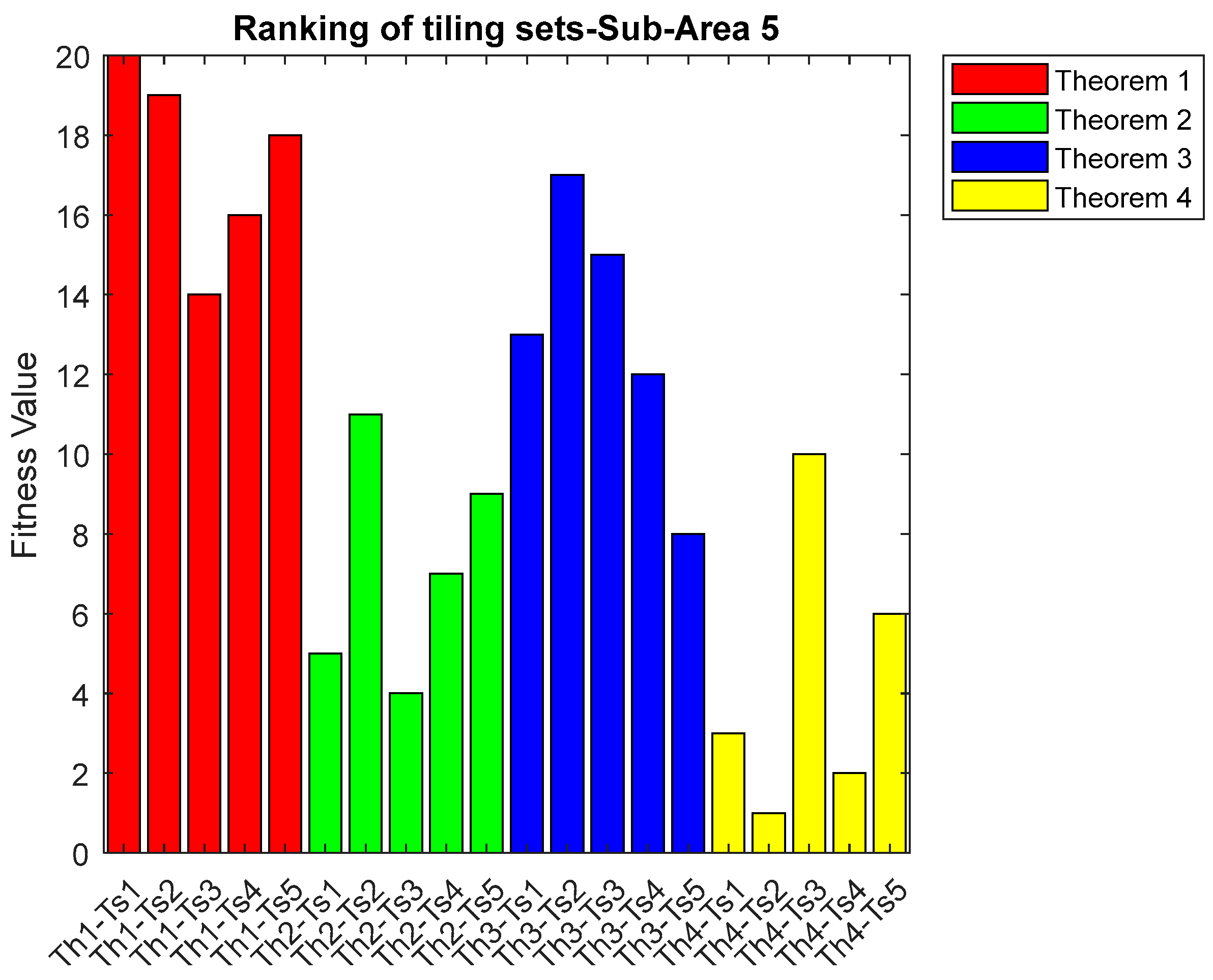
- For sub-area 5: Theorem 1 > Theorem 3 > Theorem 2 > Theorem 4
- Tiling set 5 given by Theorem 1 for sub-area 1,
- Tiling set 5 given by Theorem 1 for sub-area 2,
- Tiling set 5 given by Theorem 1 for sub-area 3,
- Tiling set 5 given by Theorem 1 for sub-area 4,
- Tiling set 1 given by Theorem 1 for sub-area 5,
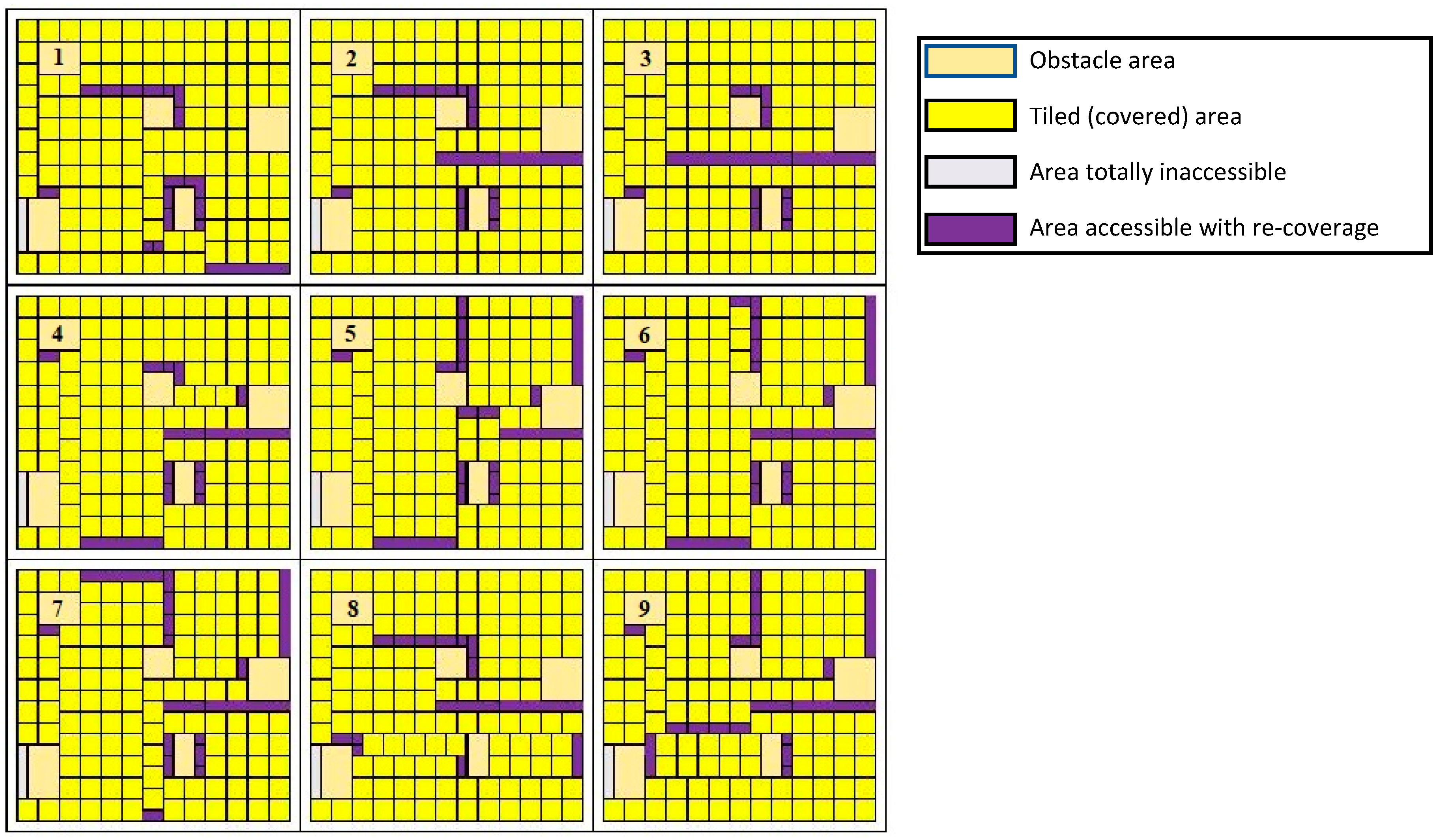
7. Evaluating the Robot Performance with and without the Tiling
8. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Vaussard, F.; Fink, J.; Bauwens, V.; Rétornaz, P.; Hamel, D.; Dillenbourg, P.; Mondada, F. Lessons learned from robotic vacuum cleaners entering the home ecosystem. Robot. Autom. Syst. 2014, 62, 376–391. [Google Scholar] [CrossRef]
- Palleja, T.; Tresanchez, M.; Teixido, M.; Palacin, J. Modeling floor-cleaning coverage performances of some domestic mobile robots in a reduced scenario. Robot. Autom. Syst. 2010, 58, 37–45. [Google Scholar] [CrossRef]
- Gao, X.; Li, K.; Wang, Y.; Men, G.; Zhou, D.; Kikuchi, K. A floor cleaning robot using Swedish wheels. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–18 December 2007. [Google Scholar]
- Yang, S.X.; Luo, C. A neural network approach to complete coverage path planning. IEEE Trans. Syst. Man Cybern. Part B 2004, 34, 718–724. [Google Scholar] [CrossRef]
- Wong, S.C.; Middleton, L.; MacDonald, B.A.; Auckland, N. Performance metrics for robot coverage tasks. In Proceedings of the Australasian Conference on Robotics and Automatio, Auckland, New Zealand, 27–29 November 2002. [Google Scholar]
- Ahmadi, M.; Stone, P. A multi-robot system for continuous area sweeping tasks. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Orlando, FI, USA, 15–19 May 2006. [Google Scholar]
- Nansai, S.; Rojas, N.; Elara, M.R.; Sosa, R. Exploration of adaptive gait patterns with a reconfigurable linkage mechanism. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Moubarak, P.; Ben-Tzvi, P. Modular and reconfigurable mobile robotics. Robot. Autom. Syst. 2012, 60, 1648–1663. [Google Scholar] [CrossRef]
- Patil, M.; Abukhalil, T.; Sobh, T. Hardware Architecture Review of Swarm Robotics System: Self-Reconfigurability, Self-Reassembly, and Self-Replication. ISRN Robot. 2013, 2013. [Google Scholar] [CrossRef]
- Kee, V.; Rojas, N.; Elara, M.R.; Sosa, R. Hinged-Tetro: A self-reconfigurable module for nested reconfiguration. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besançon, France, 8–11 July 2014. [Google Scholar]
- Prabakaran, V.; Elara, M.R.; Pathmakumar, T.; Nansai, S. hTetro: A tetris inspired shape shifting floor cleaning robot. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Prabakaran, V.; Elara, M.R.; Pathmakumar, T.; Nansai, S. Floor cleaning robot with reconfigurable mechanism. Autom. Constr. 2018, 91, 155–165. [Google Scholar] [CrossRef]
- Prabakaran, V.; Mohan, R.E.; Sivanantham, V.; Pathmakumar, T.; Kumar, S.S. Tackling Area Coverage Problems in a Reconfigurable Floor Cleaning Robot Based on Polyomino Tiling Theory. Appl. Sci. 2018, 8, 342. [Google Scholar] [CrossRef]
- Veerajagadheswar, P.; Elara, M.R.; Pathmakumar, T.; Ayyalusami, V. A Tiling-Theoretic Approach to Efficient Area Coverage in a Tetris-Inspired Floor Cleaning Robot. IEEE Access 2018, 6, 35260–35271. [Google Scholar] [CrossRef]
- Twarock, R. The Architecture of Viral Capsids Based on Tiling Theory. J. Theor. Med. 2005, 6. [Google Scholar] [CrossRef]
- Jho, C.W.; Lee, W.H. Video Puzzle Game Application of Polyomino Re-tiling. In Proceedings of the Embedded and Multimedia Computing Technology and Service, Lecture Notes in Electrical Engineering, Dordrecht, The Netherlands, 13 May 2012. [Google Scholar]
- Mardani, A.; Jusoh, A.; MD Nor, K.; Khalifah, Z.; Zakwan, N.; Valipour, A. Multiple criteria decision-making techniques and their applications—A review of the literature from 2000 to 2014. Econ. Res. Ekonomska Istraživanja 2015, 28, 516–571. [Google Scholar] [CrossRef]
- Triantaphyllou, E.; Shu, B.; Sanchez, S.N.; Ray, T. Multi-Criteria Decision Making: An Operations Research Approach. Encyclopedia of Electrical and Electronics Engineering; Webster, J.G., Ed.; John Wiley & Sons: New York, NY, USA, 1998; pp. 175–186. [Google Scholar]
- Mardani, A.; Jusoh, A.; Zavadskas, E.K. Fuzzy multiple criteria decision-making techniques and applications—Two decades review from 1994 to 2014. Expert Syst. Appl. 2015, 42, 4126–4148. [Google Scholar] [CrossRef]
- Zarghami, M.; Szidarovszky, F. Stochastic-fuzzy multi criteria decision making for robust water resources management. Stoch. Environ. Res. Risk Assess. 2009, 23, 329–339. [Google Scholar] [CrossRef]
- Chen, T.-Y. The inclusion-based TOPSIS method with interval-valued intuitionistic fuzzy sets for multiple criteria group decision making. Appl. Soft Comput. 2015, 26, 57–73. [Google Scholar] [CrossRef]
- Tzeng, G.-H.; Huang, J.-J. Multiple Attribute Decision Making, Methods and Applications; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Roszkowska, E.; Wachowicz, T. Application of fuzzy TOPSIS to scoring the negotiation offers in ill-structured negotiation problems. Eur. J. Oper. Res. 2015, 242, 920–932. [Google Scholar] [CrossRef]
- Landa-Torres, I.; Manjarres, D.; Bilbao, S.; Del Ser, J. Underwater Robot Task Planning Using Multi-Objective Meta-Heuristics. Sensors 2017, 17, 762. [Google Scholar] [CrossRef] [PubMed]
- Devi, K. Extension of VIKOR method in intuitionistic fuzzy environment for robot selection. Expert Syst. Appl. 2011, 38, 14163–14168. [Google Scholar] [CrossRef]
- Basilico, N.; Amigoni, F. Exploration strategies based on multi-criteria decision making for searching environments in rescue operations. Auton. Robots 2011, 31, 401. [Google Scholar] [CrossRef]
- Befumo, A.; Lenchner, J. Extensions of Golombs Tromino Theorem. In Proceedings of the Fall Workshop in Computational Geometry, University of Connecticut, Storrs, CT, USA, 31 October–1 November 2014. [Google Scholar]
- Golomb, S.W. Checker Boards and Polyominoes. Am. Math. Mon. 1954, 61, 675–682. [Google Scholar] [CrossRef]
- Lester, C. Tilings with T and Skew Tetrominoes. Quercus Linfield J. Undergrad. Res. 2012, 1. [Google Scholar]
- Nitica, V. The tilings of deficient squares by ribbon L-tetrominoes are diagonally cracked. arXiv, 2017; arXiv:1701.00419. [Google Scholar]
- Plonski, P.A.; Tokekar, P.; Isler, V. Energy-Efficient Path Planning for Solar-Powered Mobile Robots. In Experimental Robotics; Springer International Publishing: Heidelberg, Germany, 2013; pp. 717–731. [Google Scholar]
- Patil, M.; Abukhalil, T.; Patel, S.; Sobh, T. UB robot swarm—Design, implementation, and power management. In Proceedings of the 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016. [Google Scholar]
- Barili, A.; Ceresa, M.; Parisi, C. Energy-saving motion control for an autonomous mobile robot. In Proceedings of the IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 10–14 July 1995. [Google Scholar]
- Duleba, I.; Sasiadek, J.Z. Nonholonomic motion planning based on Newton algorithm with energy optimization. IEEE Trans. Control Syst. Technol. 2003, 11, 355–363. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area Coverage | Energy | |||||
|---|---|---|---|---|---|---|
| Area % | Real Value (m2) | Energy % | Real Value (A) | |||
| Sub-Area 1 2.058 m2 1.8228 m2 (obs-free) | Theorem 1 | Tiling set 1 | 90.322 | 1.6464 | 16.11 | 1.192 |
| Tiling set 2 | 94.623 | 1.7248 | 15.09 | 1.117 | ||
| Tiling set 3 | 86.021 | 1.568 | 14.90 | 1.103 | ||
| Tiling set 4 | 90.322 | 1.6464 | 15.92 | 1.178 | ||
| Tiling set 5 | 94.623 | 1.7248 | 15.01 | 1.111 | ||
| Theorem 2 | Tiling set 1 | 68.817 | 1.2544 | 15.60 | 1.419 | |
| Tiling set 2 | 68.817 | 1.2544 | 16.78 | 1.423 | ||
| Tiling set 3 | 64.52 | 1.2548 | 14.31 | 1.431 | ||
| Tiling set 4 | 68.817 | 1.2544 | 16.30 | 1.428 | ||
| Tiling set 5 | 60.215 | 1.0926 | 15.76 | 1.428 | ||
| Theorem 3 | Tiling set 1 | 77.419 | 1.4112 | 16.29 | 1.442 | |
| Tiling set 2 | 86.02 | 1.568 | 16.01 | 1.433 | ||
| Tiling set 3 | 86.021 | 1.568 | 15.37 | 1.440 | ||
| Tiling set 4 | 86.021 | 1.568 | 14.98 | 1.466 | ||
| Tiling set 5 | 73.118 | 1.3328 | 15.24 | 1.441 | ||
| Theorem 4 | Tiling set 1 | 73.118 | 1.3328 | 15.75 | 1.449 | |
| Tiling set 2 | 88.172 | 1.6072 | 14.23 | 1.440 | ||
| Tiling set 3 | 86.021 | 1.568 | 14.76 | 1.480 | ||
| Tiling set 4 | 86.021 | 1.568 | 15.90 | 1.466 | ||
| Tiling set 5 | 90.32 | 1.6464 | 15.12 | 1.473 | ||
| Area Coverage | Energy | |||||
|---|---|---|---|---|---|---|
| Area % | Real Value (m2) | Energy % | Real Value (A) | |||
| Sub-Area 2 0.7056 m2 No Obstacle | Theorem 1 | Tiling set 1 | 88.888 | 0.6266 | 11.98 | 0.866 |
| Tiling set 2 | 88.888 | 0.6266 | 12.55 | 0.929 | ||
| Tiling set 3 | 88.888 | 0.6266 | 12.21 | 0.903 | ||
| Tiling set 4 | 88.888 | 0.6266 | 12.02 | 0.889 | ||
| Tiling set 5 | 100 | 0.7056 | 11.45 | 0.847 | ||
| Theorem 2 | Tiling set 1 | 88.888 | 0.6266 | 12.91 | 1.101 | |
| Tiling set 2 | 77.777 | 0.5488 | 12.11 | 1.126 | ||
| Tiling set 3 | 88.888 | 0.6266 | 11.52 | 0.998 | ||
| Tiling set 4 | 77.777 | 0.5488 | 12.10 | 1.012 | ||
| Tiling set 5 | 66.666 | 0.4704 | 11.00 | 1.110 | ||
| Theorem 3 | Tiling set 1 | 55.555 | 0.3914 | 11.78 | 0.989 | |
| Tiling set 2 | 55.555 | 0.3914 | 12.41 | 0.961 | ||
| Tiling set 3 | 66.666 | 0.4704 | 11.56 | 1.003 | ||
| Tiling set 4 | 66.666 | 0.4704 | 12.30 | 1.120 | ||
| Tiling set 5 | 55.555 | 0.3914 | 12.23 | 0.890 | ||
| Theorem 4 | Tiling set 1 | 88.888 | 0.6266 | 12.90 | 0.994 | |
| Tiling set 2 | 88.888 | 0.6266 | 11.89 | 1.102 | ||
| Tiling set 3 | 88.888 | 0.6266 | 12.32 | 1.119 | ||
| Tiling set 4 | 88.888 | 0.6266 | 12.12 | 1.103 | ||
| Tiling set 5 | 88.888 | 0.6266 | 11.95 | 0.988 | ||
| Area Coverage | Energy | |||||
|---|---|---|---|---|---|---|
| Area % | Real Value (m2) | Energy % | Real Value (A) | |||
| Sub-Area 3 3.3124 m2 3.0184 m2 (obs-free) | Theorem 1 | Tiling set 1 | 82.825 | 2.8224 | 19.81 | 1.466 |
| Tiling set 2 | 83.116 | 2.5088 | 19.06 | 1.410 | ||
| Tiling set 3 | 90.909 | 2.744 | 19.59 | 1.449 | ||
| Tiling set 4 | 83.116 | 2.5088 | 18.36 | 1.358 | ||
| Tiling set 5 | 93.506 | 2.8224 | 19.48 | 1.442 | ||
| Theorem 2 | Tiling set 1 | 77.92 | 2.352 | 18.43 | 1.710 | |
| Tiling set 2 | 80.519 | 2.4304 | 17.78 | 1.702 | ||
| Tiling set 3 | 70.12 | 2.1168 | 18.01 | 1.691 | ||
| Tiling set 4 | 72.227 | 2.1952 | 17.44 | 1.699 | ||
| Tiling set 5 | 75.32 | 2.2736 | 18.07 | 1.710 | ||
| Theorem 3 | Tiling set 1 | 81.8181 | 2.4696 | 19.91 | 1.701 | |
| Tiling set 2 | 83.116 | 2.5088 | 18.21 | 1.699 | ||
| Tiling set 3 | 85.714 | 2.5872 | 19.35 | 1.701 | ||
| Tiling set 4 | 83.116 | 2.5088 | 19.71 | 1.717 | ||
| Tiling set 5 | 77.922 | 2.352 | 19.22 | 1.729 | ||
| Theorem 4 | Tiling set 1 | 75.32 | 2.2736 | 17.41 | 1.711 | |
| Tiling set 2 | 80.519 | 2.4304 | 19.09 | 1.737 | ||
| Tiling set 3 | 80.519 | 2.4304 | 19.45 | 1.712 | ||
| Tiling set 4 | 80.519 | 2.4304 | 19.32 | 1.724 | ||
| Tiling set 5 | 80.519 | 2.4304 | 19.88 | 1.718 | ||
| Area Coverage | Energy | |||||
|---|---|---|---|---|---|---|
| Area % | Real Value (m2) | Energy % | Real Value (A) | |||
| Sub-Area 4 3.3124 m2 2.9988 m2 (obs-free) | Theorem 1 | Tiling set 1 | 91.503 | 2.744 | 18.23 | 1.349 |
| Tiling set 2 | 94.117 | 2.8224 | 16.79 | 1.242 | ||
| Tiling set 3 | 86.2745 | 2.5872 | 17.10 | 1.265 | ||
| Tiling set 4 | 91.503 | 2.744 | 17.39 | 1.287 | ||
| Tiling set 5 | 96.732 | 2.9008 | 16.58 | 1.227 | ||
| Theorem 2 | Tiling set 1 | 77.124 | 2.3128 | 16.89 | 1.779 | |
| Tiling set 2 | 80.392 | 2.4108 | 17.66 | 1.767 | ||
| Tiling set 3 | 73.202 | 2.1952 | 15.16 | 1.795 | ||
| Tiling set 4 | 84.313 | 2.5284 | 16.78 | 1.801 | ||
| Tiling set 5 | 81.045 | 2.4304 | 17.09 | 1.780 | ||
| Theorem 3 | Tiling set 1 | 81.04 | 2.4304 | 16.51 | 1.771 | |
| Tiling set 2 | 83.66 | 2.5088 | 16.66 | 1.770 | ||
| Tiling set 3 | 86.274 | 2.5872 | 17.71 | 1.799 | ||
| Tiling set 4 | 75.816 | 2.2736 | 15.39 | 1.787 | ||
| Tiling set 5 | 78.431 | 2.352 | 17.41 | 1.770 | ||
| Theorem 4 | Tiling set 1 | 73.202 | 2.1952 | 15.89 | 1.799 | |
| Tiling set 2 | 83.66 | 2.5088 | 17.55 | 1.769 | ||
| Tiling set 3 | 83.66 | 2.5088 | 16.70 | 1.767 | ||
| Tiling set 4 | 81.045 | 2.4304 | 17.45 | 1.775 | ||
| Tiling set 5 | 83.66 | 2.5088 | 16.10 | 1.778 | ||
| Area Coverage | Energy | |||||
|---|---|---|---|---|---|---|
| Area % | Real Value (m2) | Energy % | Real Value (A) | |||
| Sub-Area 5 2.156 m2 1.9992 m2 (obs-free) | Theorem 1 | Tiling set 1 | 98.039 | 1.96 | 18.30 | 1.354 |
| Tiling set 2 | 94.117 | 1.8816 | 18.68 | 1.382 | ||
| Tiling set 3 | 90.196 | 1.8032 | 19.46 | 1.440 | ||
| Tiling set 4 | 94.117 | 1.8816 | 20.04 | 1.483 | ||
| Tiling set 5 | 94.117 | 1.8816 | 19.23 | 1.4237 | ||
| Theorem 2 | Tiling set 1 | 81.372 | 1.6268 | 19.09 | 1.489 | |
| Tiling set 2 | 86.27 | 1.7248 | 20.31 | 1.491 | ||
| Tiling set 3 | 82.352 | 1.6364 | 20.80 | 1.511 | ||
| Tiling set 4 | 82.352 | 1.6464 | 18.31 | 1.534 | ||
| Tiling set 5 | 86.28 | 1.7248 | 21.03 | 1.487 | ||
| Theorem 3 | Tiling set 1 | 90.19 | 1.8032 | 20.53 | 1.512 | |
| Tiling set 2 | 94.117 | 1.8816 | 19.41 | 1.490 | ||
| Tiling set 3 | 90.196 | 1.8032 | 19.05 | 1.506 | ||
| Tiling set 4 | 86.27 | 1.7248 | 19.69 | 1.493 | ||
| Tiling set 5 | 86.28 | 1.7248 | 21.10 | 1.510 | ||
| Theorem 4 | Tiling set 1 | 78.43 | 1.568 | 17.26 | 1.497 | |
| Tiling set 2 | 78.43 | 1.568 | 17.87 | 1.487 | ||
| Tiling set 3 | 86.274 | 1.7248 | 20.33 | 1.503 | ||
| Tiling set 4 | 78.431 | 1.568 | 17.65 | 1.480 | ||
| Tiling set 5 | 82.352 | 1.6464 | 19.77 | 1.501 | ||
| Sub-Area 1 | Rank | Rank Sum | |
|---|---|---|---|
| Theorem 1 | Tiling set 1 | 5 | 20 |
| Tiling set 2 | 2 | ||
| Tiling set 3 | 8 | ||
| Tiling set 4 | 4 | ||
| Tiling set 5 | 1 | ||
| Theorem 2 | Tiling set 1 | 16 | 90 |
| Tiling set 2 | 18 | ||
| Tiling set 3 | 19 | ||
| Tiling set 4 | 17 | ||
| Tiling set 5 | 20 | ||
| Theorem 3 | Tiling set 1 | 13 | 58 |
| Tiling set 2 | 12 | ||
| Tiling set 3 | 10 | ||
| Tiling set 4 | 9 | ||
| Tiling set 5 | 14 | ||
| Theorem 4 | Tiling set 1 | 15 | 42 |
| Tiling set 2 | 6 | ||
| Tiling set 3 | 7 | ||
| Tiling set 4 | 11 | ||
| Tiling set 5 | 3 |
| Sub-Area 2 | Rank | Rank Sum | |
|---|---|---|---|
| Theorem 1 | Tiling set 1 | 5 | 30 |
| Tiling set 2 | 10 | ||
| Tiling set 3 | 8 | ||
| Tiling set 4 | 6 | ||
| Tiling set 5 | 1 | ||
| Theorem 2 | Tiling set 1 | 12 | 56 |
| Tiling set 2 | 14 | ||
| Tiling set 3 | 2 | ||
| Tiling set 4 | 13 | ||
| Tiling set 5 | 15 | ||
| Theorem 3 | Tiling set 1 | 18 | 90 |
| Tiling set 2 | 20 | ||
| Tiling set 3 | 16 | ||
| Tiling set 4 | 17 | ||
| Tiling set 5 | 19 | ||
| Theorem 4 | Tiling set 1 | 11 | 34 |
| Tiling set 2 | 3 | ||
| Tiling set 3 | 9 | ||
| Tiling set 4 | 7 | ||
| Tiling set 5 | 4 |
| Sub-Area 3 | Rank | Rank Sum | |
|---|---|---|---|
| Theorem 1 | Tiling set 1 | 8 | 22 |
| Tiling set 2 | 6 | ||
| Tiling set 3 | 2 | ||
| Tiling set 4 | 5 | ||
| Tiling set 5 | 1 | ||
| Theorem 2 | Tiling set 1 | 15 | 81 |
| Tiling set 2 | 9 | ||
| Tiling set 3 | 20 | ||
| Tiling set 4 | 19 | ||
| Tiling set 5 | 18 | ||
| Theorem 3 | Tiling set 1 | 10 | 40 |
| Tiling set 2 | 4 | ||
| Tiling set 3 | 3 | ||
| Tiling set 4 | 7 | ||
| Tiling set 5 | 16 | ||
| Theorem 4 | Tiling set 1 | 17 | 67 |
| Tiling set 2 | 11 | ||
| Tiling set 3 | 13 | ||
| Tiling set 4 | 12 | ||
| Tiling set 5 | 14 |
| Sub-Area 4 | Rank | Rank Sum | |
|---|---|---|---|
| Theorem 1 | Tiling set 1 | 4 | 15 |
| Tiling set 2 | 2 | ||
| Tiling set 3 | 5 | ||
| Tiling set 4 | 3 | ||
| Tiling set 5 | 1 | ||
| Theorem 2 | Tiling set 1 | 18 | 73 |
| Tiling set 2 | 15 | ||
| Tiling set 3 | 19 | ||
| Tiling set 4 | 8 | ||
| Tiling set 5 | 13 | ||
| Theorem 3 | Tiling set 1 | 12 | 60 |
| Tiling set 2 | 9 | ||
| Tiling set 3 | 6 | ||
| Tiling set 4 | 17 | ||
| Tiling set 5 | 16 | ||
| Theorem 4 | Tiling set 1 | 20 | 62 |
| Tiling set 2 | 11 | ||
| Tiling set 3 | 10 | ||
| Tiling set 4 | 14 | ||
| Tiling set 5 | 7 |
| Sub-Area 5 | Rank | Rank Sum | |
|---|---|---|---|
| Theorem 1 | Tiling set 1 | 1 | 18 |
| Tiling set 2 | 2 | ||
| Tiling set 3 | 7 | ||
| Tiling set 4 | 5 | ||
| Tiling set 5 | 3 | ||
| Theorem 2 | Tiling set 1 | 16 | 69 |
| Tiling set 2 | 10 | ||
| Tiling set 3 | 17 | ||
| Tiling set 4 | 14 | ||
| Tiling set 5 | 12 | ||
| Theorem 3 | Tiling set 1 | 8 | 40 |
| Tiling set 2 | 4 | ||
| Tiling set 3 | 6 | ||
| Tiling set 4 | 9 | ||
| Tiling set 5 | 13 | ||
| Theorem 4 | Tiling set 1 | 18 | 83 |
| Tiling set 2 | 20 | ||
| Tiling set 3 | 11 | ||
| Tiling set 4 | 19 | ||
| Tiling set 5 | 15 |
| Sweeping Solution | Area-Coverage (%) | Energy (A) |
|---|---|---|
| 1 | 496/538 = 92.19% | 5.23 |
| 2 | 496/538 = 92.19% | 5.44 |
| 3 | 496/538 = 92.19% | 5.87 |
| 4 | 496/538 = 92.19% | 5.91 |
| 5 | 484/538 = 89.96% | 6.67 |
| 6 | 484/538 = 89.96% | 6.312 |
| 7 | 484/538 = 89.96% | 6.18 |
| 8 | 496/538 = 92.19% | 6.22 |
| 9 | 484/538 = 89.96% | 6.48 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouzehgar, M.; Rajesh Elara, M.; Ann Philip, M.; Arunmozhi, M.; Prabakaran, V. Multi-Criteria Decision Making for Efficient Tiling Path Planning in a Tetris-Inspired Self-Reconfigurable Cleaning Robot. Appl. Sci. 2019, 9, 63. https://doi.org/10.3390/app9010063
Kouzehgar M, Rajesh Elara M, Ann Philip M, Arunmozhi M, Prabakaran V. Multi-Criteria Decision Making for Efficient Tiling Path Planning in a Tetris-Inspired Self-Reconfigurable Cleaning Robot. Applied Sciences. 2019; 9(1):63. https://doi.org/10.3390/app9010063
Chicago/Turabian StyleKouzehgar, Maryam, Mohan Rajesh Elara, Mahima Ann Philip, Manimuthu Arunmozhi, and Veerajagadheswar Prabakaran. 2019. "Multi-Criteria Decision Making for Efficient Tiling Path Planning in a Tetris-Inspired Self-Reconfigurable Cleaning Robot" Applied Sciences 9, no. 1: 63. https://doi.org/10.3390/app9010063
APA StyleKouzehgar, M., Rajesh Elara, M., Ann Philip, M., Arunmozhi, M., & Prabakaran, V. (2019). Multi-Criteria Decision Making for Efficient Tiling Path Planning in a Tetris-Inspired Self-Reconfigurable Cleaning Robot. Applied Sciences, 9(1), 63. https://doi.org/10.3390/app9010063