1. Introduction
The past few decades have witnessed rapid development of application of unmanned aerial vehicles (UAVs), popularly known as drones. Given the characteristics of small volume, high mobility and low energy consumption, UAVs have been widely utilized in public, civil and military applications [
1,
2,
3]. In particular, with proper deployment and operation, UAVs can provide reliable and efficient wireless communication solutions for various real-world scenarios. Furthermore, UAVs can act like self-organizing sensor nodes, and efficiently carry out the pre-assigned tasks [
4]. For instance, in public safety scenarios (earthquake, volcano, military attack, etc.), UAVs can be utilized as flying base stations, and replace damaged communication infrastructure and guarantee information dissemination for UAV-assisted sensor networks [
5,
6].
Note that single UAV often fails to meet the need of complicated missions such as area coverage, communication connectivity and relay deployment. To address this issue, the large scale of UAVs are required to form groups (formations) to execute missions under different requirements. In [
7], a multi-UAV cooperative model was presented to work out search and surveillance issues. Authors in [
8] considered the information consensus under multi-UAVs communication noise, and constructed it as a signal-to-noise ratio model for UAV cooperative target tracking. The authors in [
9] proposed a cooperative detection model which consisted of target identification and time control.
UAV area coverage problems were studied in [
10,
11,
12,
13,
14]. Under the circumstance of cooperative multi-UAV coverage deployment, missions such as investigation, communication and mapping can be accomplished well. The most important part of the UAV area coverage problem is the evaluation of coverage ability. In [
10], the authors described the ratio of coverage area and given area as the evaluation of UAV coverage ability, which is one of the most common evaluations. Notably, characteristics of mobility and line-of-sight (LOS) enable UAVs to support terrestrial networks for information dissemination and connectivity enhancement [
15,
16,
17]. Given the fact that the ground communication infrastructure will be destroyed during natural disasters, it is critical for UAVs to perform efficient coverage deployment and execute searching and rescue operations.
In the above scenarios, UAVs arrive at the designated position according to task demand and perform coverage tasks such as data collection. Next, the information (data, etc.) will be forwarded to the central UAV through the UAV-to-UAV link. Note that UAVs can carry limited energy, and the energy consumed by information transmission must be minimized based on mission requirements. Therefore, the data transmission mechanism should be well constructed in UAV communication. In general terms, as the transmitting distance grows, the energy consumption of UAVs will increase exponentially. To avoid high energy consumption, an effective technical solution is proposed in [
18], utilizing some UAVs as relays. However, it remains challenging to deploy UAVs and design transmission mechanism due to the complex cooperative behaviors among UAVs.
Motivated by the design of the cooperative mechanism, with which authors significantly reduce the overhead of spectrum acquisition in [
19,
20], we adopt the coalition formation game (CFG) to describe the relationships between UAVs. Further work about data transmission mechanism design is introduced in [
21]. However, unlike the studies above, the coalition is constituted by considering coverage reward and corresponding energy consumption among UAVs in this work. The object of CFG is to study the network coalition structure to optimize performance [
22], which can be the basis for investigating cooperative behaviors of UAVs.
Research has been done to study CFG in UAV networks. The authors in [
4] proposed a novel CFG model in data collection and transmission, where UAVs are sent to serve randomly located missions, collect data and transmit it to a central command through wireless communication. In [
23], the authors took the aerial back haul scheme among UAVs as the mechanism of network formation game, and proposed a model that utilizes UAVs as an on-demand flying network, where UAVs seek to form a multi-hop back haul network in the air. However, the current research of CFG has focused on connectivity enhancement, data transmission improvement and routing, but without considering the trade-off between the coverage reward and energy consumed by transmission in UAV networks. In that situation, we jointly consider a communication coverage and data transmission scenario in the UAV-assisted sensor network, and propose an efficient cooperative UAV deployment model based on coalition formation. The key of coalition formation is to describe the relationships between coverage reward and energy consumption.
The main contribution in this paper can be summarized as follows:
An efficient cooperative multi-UAV deployment model based on coalition formation is proposed, describing the trade-off between the coverage reward and energy consumption in UAV-assisted network. Coverage utility function is characterized as a reference for coalition formation to accurately depict the transmission model.
Through game analysis, the stable solution of the proposed system model is proved to exist. The proposed UAV coverage and data transmission approach can achieve at least one stable coverage deployment and coalition formation scheme to maximize the coverage utility of the whole UAV network.
Coalition selection and position deployment algorithm based on Pareto order (CSPDA-PO) is designed to perform coalition selection and position deployment. The CSPDA-PO algorithm is able to achieve the stable state of our system model. Meanwhile, convergence of the proposed algorithm is also shown in the simulation.
Note that authors in [
7,
24] did some works that are relevant to our work, especially in constructing the UAV coverage model, including evaluation of coverage ability and deployment mechanism. The main differences can be summed up to: (i) the UAV deployment is not only concerned with the coverage ability, but also the coalition formation under the comprehensive coverage reward and energy consumption; and (ii) the energy consumption model for transmitting and receiving through radio frequency (RF) signals is introduced into coalition formation mechanism, which is associated with coverage reward under current deployment.
The rest of the paper is organized as follows:
Section 2 shows the system model of multi-UAV cooperative deployment and problem formulation. In
Section 3, a coalition formation game approach for the system model is analyzed, and the learning algorithm is designed to converge the proposed problem to the stable state. Simulation results and analysis are presented in
Section 4. Finally, the concluding remarks are given in
Section 5.
2. System Model and Problem Formulation
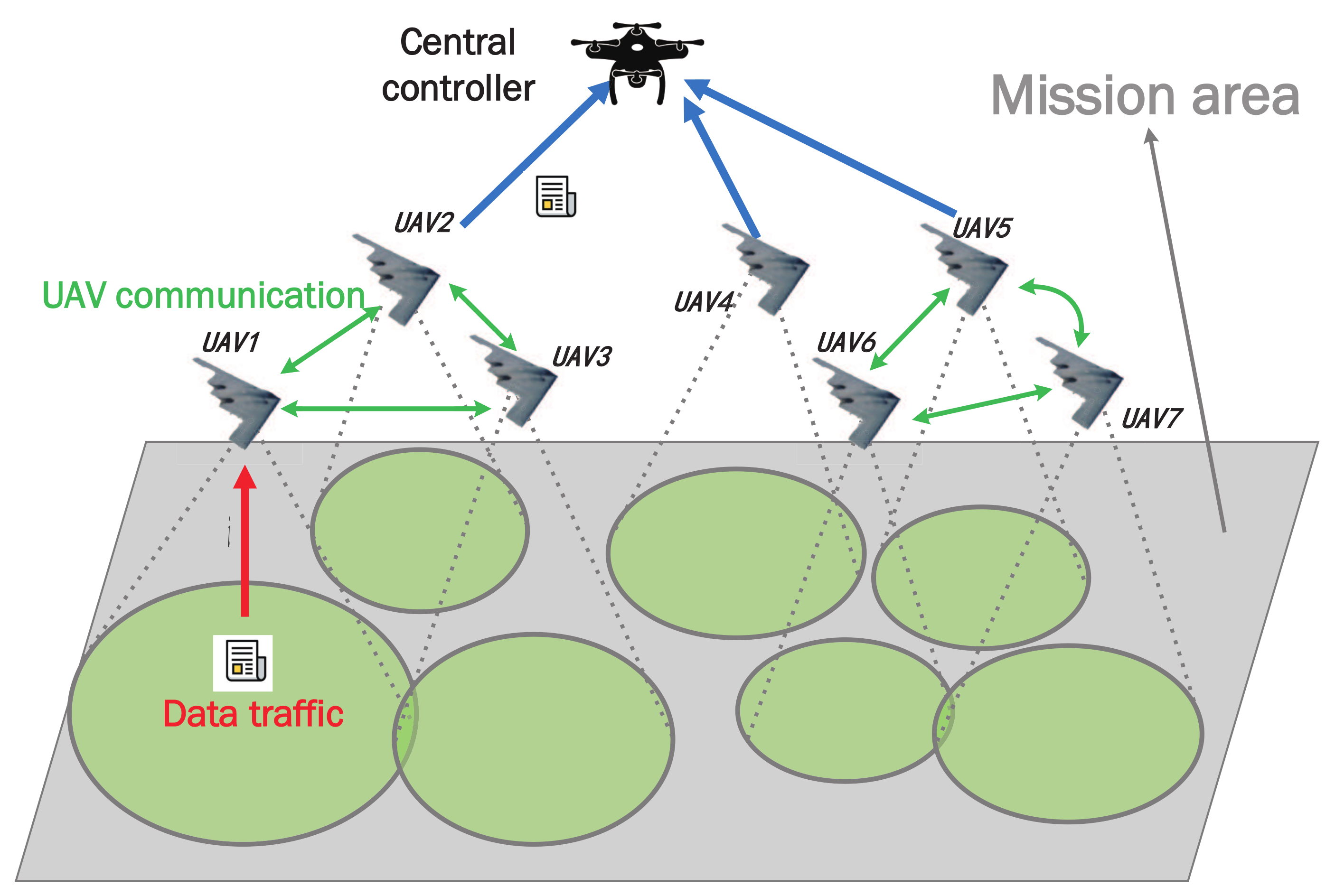
We consider a UAV-assisted sensor network employing N distributed UAVs and one central control UAV, where UAV groups perform reconnaissance and data collection tasks under disaster scenarios. UAVs communicate with each other through radio frequency (RF) signals of wireless sensors. The sensor devices are equipped on UAV’s fuselage. Sensor devices have limited battery power and data processing capabilities. They can also acquire the location of other sensor nodes (UAV). The UAV groups need to collect data information by covering the ground. Here, UAV’s coverage capability is determined by observation thresholds. Then, the data traffic collected by distributed UAVs is sent to the central UAV for processing. Due to the huge energy consumption caused by long distance transmission, it requires forming groups and utilizes some UAV sensor nodes as relays to carry out data transmission.
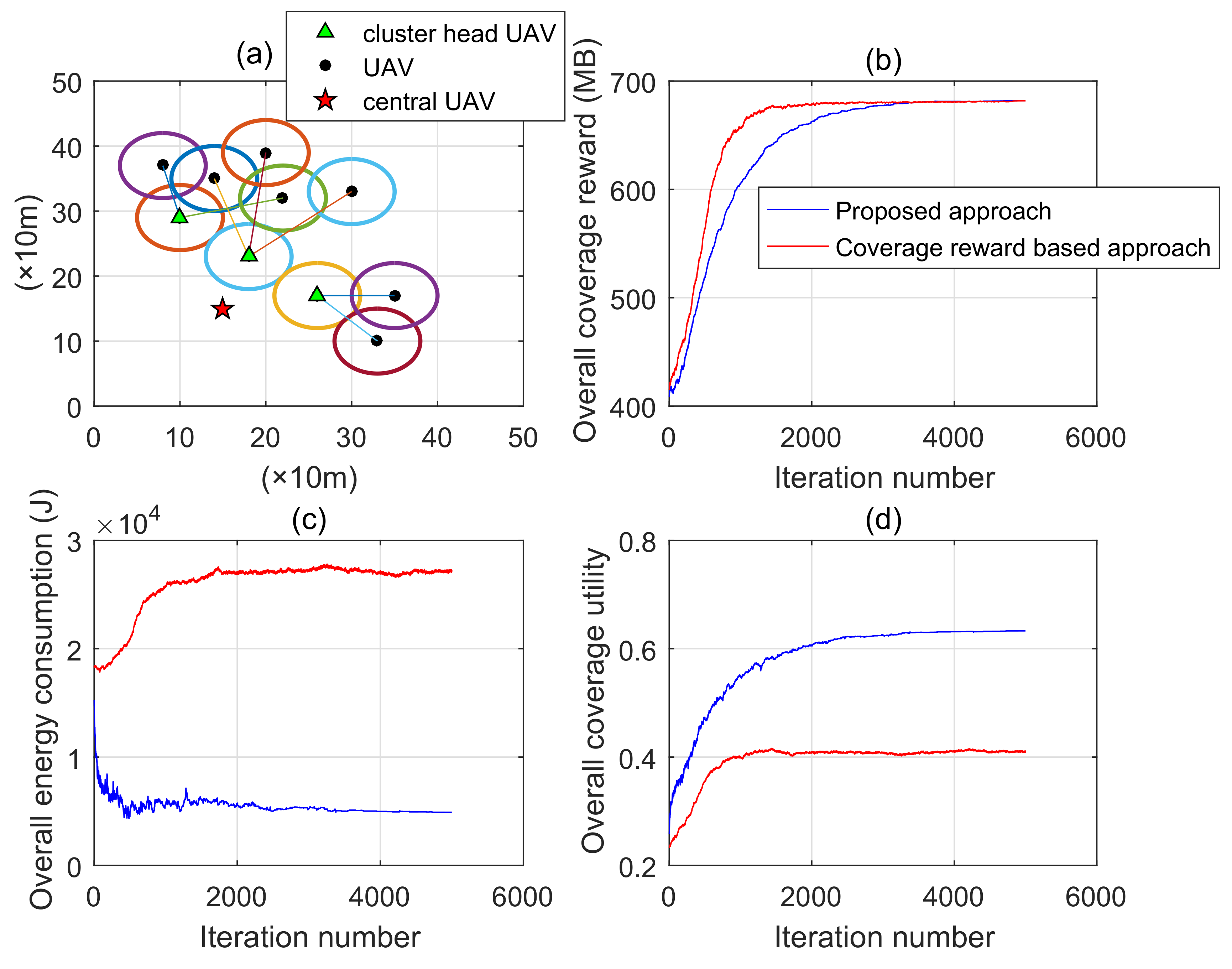
For the cooperative multi-UAV deployment example showed in
Figure 1, there are seven UAVs performing coverage mission and uploading the collected information data to the upper central UAV. Due to the limited energy of sensor devices, UAVs need to form groups to cooperate. In this case, some UAVs are used as relays to optimize the energy consumption of data transmission. In particular, the high transmission energy consumption between UAVs that are too far apart (such as UAV 1 and UAV 7) prevents the formation of the grand coalition. Therefore, it makes sense to consider the coalition formation by optimizing the coverage utility of the UAV network.
To facilitate computation, we discretize the continuous area , which is uniformly meshed and divided into cells, and each cell i’s width is and is identified by the position of its center . Denote the number of available coalitions as M, , and the set of UAVs as , i.e., , and the set of available coalition as , i.e., . The serial number of the central UAV is set to 0. For each , let denote UAV n’s coalition selections, denotes UAV n’s three-dimensional position. Hence, the UAV n’s state is defined as . For each , let denote the set of UAVs which select coalition m for data transmission, i.e, . In addition, the central UAV’s position is denoted as .
For each
, suppose that
is the importance (traffic, etc.) of mission cell
i, and is denoted by the form of a normalized density function. For simplicity, we set
as the reward for UAV set
completing the coverage of mission area
I successfully, which is given as follows [
1]:
where
Equation (
2) indicates that, as long as area
i is within the detection range of UAV
n in the network, it will be considered successfully covered by UAV
n with all data traffic collected. Hence,
represents the coverage performance (says reward) of mission area
I under UAV set
. In particular, the overall coverage reward of UAV network is
.
From the above description, data traffic collected by distributed UAVs will be transmitted through the UAV-to-UAV link to the central control UAV for processing. In the UAV-assisted sensor network, most of the power energy consumed by wireless sensors is derived extensively from a transmission operation that consists of sending and receiving. Therefore, motivated by the work in [
25], we adopt expressions to estimate the energy consumption for transmitting and receiving of each sensor node through RF signals, which are given by:
where
represents the distance between UAV
i and
j,
is the energy consumed by radio when performing transmitting and receiving.
and
represents the energy consumed by transmitting one bit of data at a shorter distance and at a longer distance, respectively.
Thus, consider the data transmission through link of UAV
i and UAV
j, the overall energy consumption per bit of data is derived as follows:
In a coalition, cluster head UAV plays an important role in connecting coalition members and the upper central UAV, so as to achieve data transmission. Suppose that the overall energy consumption function of the whole network is defined as follows:
where
represents the coalition
m’s cluster head UAV,
and
is UAV
n and UAV set
’s mission reward, indicating the data traffic they collect. Equation (
5) contains two items: the first item represents the energy consumption of data transmission, which is collected from coalition
m’s cluster member UAV to
m’s cluster head UAV. The second item represents the energy consumption of data transmission, which is transmitted from coalition
m’s cluster head UAV to the upper central UAV. Therefore, Equation (
5) reflects the overall energy consumption of the whole UAV network when all data are transmitted to the central UAV.
From the above formulation, it can be concluded that UAV deployment is affected by the importance of ground data traffic distribution, while the energy consumption of the path is also limited by the communication distance between UAVs. When the battery can’t support long distance UAV communication, the deployment of UAV coverage can be severely affected, making our proposed problem fall into a dilemma. It is meaningful to accurately characterize the relationships between coverage reward and energy consumption. Therefore, according to Equations (
1) and (
5), we have the whole UAV network’s coverage utility:
where
represents the weight coefficient, indicating the importance of reward and transmission energy consumption. Here,
is calculated and measured from parameters of UAVs and mission requirements environment. Therefore, the setting of
decides the mission requirements and has a strong reference value of weighing the gain and cost. It should be pointed out that some constraints for both variables can be set under the condition of driven mission, such as a guarantee of minimal reward and limitation of maximal energy consumption. For intuitive comparison, the object of this model is maximizing the whole UAV network’s coverage utility through adjusting UAVs’ state:
Here, solving can obtain an efficient multi-UAV deployment and coalition transmission mechanism, which makes UAVs achieve better coverage reward without producing much energy consumed by data transmitting and receiving.
3. A Coalition Formation Game Approach for Coverage Utility Maximization
Notably, solving is challenging due to the enormous strategies (positions and coalitions), an effective method is required to simplify the process: Step 1 (Reward optimization): Carry out coverage optimization deployment under current coalition formation. Step 2 (Coverage utility maximization): Under the fixed deployment of UAVs, the coalition selection method is considered to maximize . Step 3: Repeat the above steps until reaches maximization. This approach can not only avoid the computing complexity caused by multi-strategies, but also be able to work out the optimal solution of .
In distributed multi-agent control system, players interact with each other and make self-determined strategies. Motivated by that, the proposed UAV efficient deployment problem can be formulated as a game. According to Equation (
6), the utility function consists of two items, and we focus on achieving global optimization. Formally, the game is denoted by
, where
is a set of UAVs,
(⊗ is Cartesian product) represents a set of available joint state profiles, where
and
represent a set of the available positions and coalitions for each UAV
n, respectively. Denote an element of
and
as
and
.
represents the utility function and can be expressed as
, where
represents the state selection of UAV
n and
is the state profiles of all the UAVs excluding
n, the same is true with
and
.
Definitions are given in the following to analyze the properties of the coalition formation game.
Definition 1 (Coalition formation game, CFG [22]). A (hedonic) coalition formation game is given by a pair , where denotes the preferences profile, specifying for each player its preference relation .
It should be noted that a coalition partition is denoted as a set
which partitions
N, where the subsets
are called coalitions and are disjoint. Let
denote the set
i.e., if
Apparently, is a typical CFG. UAVs in make decisions through different preference relations, and form different coalition partitions. However, first of all, the UAV deployment should be discussed first given the coalition partition .
3.1. Analysis of the Mission Reward Maximization
(1) Utility Function: As discussed before, each UAV prefers a higher coverage performance and less energy consumption of transmission. Accordingly, we consider the UAV
n’s marginal coverage contribution and measure the coverage utility of mission area
I of UAV
n as follows:
In Step 1, given the method that coverage optimization deployment should be done before coalition selection each loop, we have the following equation:
(2) Analysis of
: Considering that the cooperative behaviours among UAVs should be well depicted, a potential game is adopted, which applies to a distributed multi-agent system and can associate with the local utility and global utility of each participant [
26]. Hence, combining with the distributed self-organizing characteristics of UAVs, the whole system can make decisions to achieve more efficient performance. Here, the definition of Nash equilibrium (NE) is shown in the following, indicating the steady state of a noncooperative game.
Definition 2 (Nash equilibrium (NE) [27]). A position selection profile is a pure strategy NE of game if and only if no player n can improve its utility by changing its states, i.e., Definition 3 (Exact potential game (EPG) [28]). For utility function in a game , if there exists a potential function , for arbitrary position strategy selection changes from to , the following equation is true: Then, this game is called exact potential game and has at least one NE point.
Lemma 1. Given that the current coalition partition Π, is an EPG and has at least one NE point.
Proof. Here, we construct the potential function as follows:
which also represents the global coverage utility of UAV network. Assume that an arbitrary UAV
n changes its position profile from
to
; then, we have the following formulation:
Intuitively, for each UAV
, its individual coverage performance is completely unaffected by the above action changes, in addition to the energy consumption of UAV set
. Thus, the results of the last four items from Equation (
14) are identical: zero. Then, we derive the following equation according to Equations (
13) and (
14):
The work for the proof has been done in [
7]. Therefore, according to Definition 3,
is an EPG with coverage utility
serving as the potential function. It can be concluded that
has at least one NE point. Note that the designed potential function refers to overall coverage utility. Hence, the NE solution of
turns to be the pure strategy NE point of
. which can be effectively helpful for the proof of the stability in the proposed model
. □
Motivated by the learning algorithm design in [
7], we introduce a coverage optimization deployment algorithm based on binary log-linear learning (CODA-BLL) (Algorithm 1) to execute coverage maximization deployment. The proposed algorithm is mainly based on the binary log-linear learning, which was proved to guarantee convergence of Nash equilibrium [
7,
29]. Given the current coalition selection profiles, the algorithm is executed one time to explore an optimal deployment for coverage utility per loop. Here, we design Equation (
16) as the UAVs’ position selection probability function, where
is the learning parameter (
> 0):
| Algorithm 1. One time coverage optimization deployment algorithm based on Binary log-linear learning (CODA-BLL). |
Initialization: Input UAVs’ current state profiles .
Step 1: Randomly select UAV n, calculate its coverage performance of current UAV deployment state according to Equation (9).
Step 2: For selected UAV n, choose an expected action from the . The selected UAV n computes its current coverage performance and the expected utility according to Equation (6).
Step 3: UAV n choose a position deployment according to Equation (16) and update its state .
Step 4: Output UAVs’ state . |
3.2. Analysis of the Stable Coalition Partition
(1) Utility Function: In Step 2, under fixed deployment, UAV
n’s individual energy consumption can be expressed as follows:
where
represents the three-dimensional position of coalition
’s cluster head UAV.
represents the coalition
’s data traffic energy consumption from the terrestrial to the central controller.
Then, for each UAV
, it makes coalition selection through its individual coverage utility, which can be derived as follows:
In Definition 1, the preference relation is introduced, which decides whether a player prefers to join or leave the coalition. Notably, the preference relation can affect the convergence and the stable state of the final structure of CFG [
30]. Next, an ordinary preference order called Pareto order is adopted to analyze the property of the proposed game model.
Definition 4 (Pareto order). In CFG, its preference relation satisfies Pareto order if for each player and all coalition partition , there exists the following formula: In Pareto order, each player n obeys the principle that they won’t make strategy damage the utility of other players i in the original or new coalition. Hence, the profit of all coalition partition will not decrease. Due to the limited profit players can get, Pareto order can be a very strong proof of stable coalition partition.
The UAVs’ coalition selection satisfies the definition of preference profiles, which also indicates that
is a typical CFG according to Definition 1. Typically, in a CFG, the most important part is the formation criteria, which determines the structure of coalitions. Here, we consider the Pareto order [
31], which rests with the preference on the individual payoffs of the players rather than the coalition value [
22]. Afterwards, the coalition formation rule is required when the preference order is determined.
Authors in [
32] introduced a merge and split rule, which is used for forming or breaking coalition. Both rules focus on the profits of all the players in the coalition. For example, any pair of coalition
and
can be merged into one coalition when all the players have an increased profit. On the contrary, a coalition can be split into coalition
and
since each players in their new coalition can achieve a better profit. It is noted that, according to Equation (
18), for each UAV
n, the first item of its individual coverage utility function is fixed due to the stability of
.
(2) Analysis of CFG: In this part, we analyze the stability of the proposed CFG through the given preferences and rules, and then solve the problem.
Definition 5 (Stable coalition partition [19]). A partition Π
is said to be stable if no player can improve its utility by arbitrarily change its strategy, i.e., ifthen Π
is thought to have a stable coalition partition. Theorem 1. With the preference relation of Pareto order, the CFG can be converged to the stable coalition partition.
Proof. (1) Note that, given the coalition selection profiles of UAVs in Step 1, the reward maximization model is proved to be an EPG and has at least one NE point through Lemma 1. According to Definition 2, there exists at least one position selection profile for UAVs if and only if no UAV n can improve its utility by changing its state under the current coalition selection.
(2) In the coverage utility maximization step, the utility function can be derived as since UAVs’ deployment is determined. Based on the above description, Pareto order is used for coalition selection while each UAV n take as its payoff. In the above description, the sets of players (UAVs) and strategies () are limited, and Pareto order can improve current coalition’s utility without damage any other UAVs, so that the profit of all coalitions can finally converge to a peak. Denote as the final coalition partition. If is not stable, then there exists a UAV, says n, whose arbitrary change will improve , which contradicts the previous argument of limited profit. Finally, we can conclude from Definition 5 that there exists a stable coalition partition in CFG with Pareto order. □
3.3. Algorithm Design of CFG Model
Based on the existence of the stable state in the above section, next we are going to solve the stable stable of by designing an algorithm. However, due to the diversity of UAV set and strategy sets (position and coalition), the kind of optimal selection approach often falls into a trap loop, that is, local optimum.
In that case, learning algorithms need to be applied to explore the stable state of game. Motivated by the exploring mechanism of a distributed learning algorithm called spatial adaptive play (SAP) in [
27], we designed a coalition selection and position deployment algorithm based on Pareto order (CSPDA-PO) to converge the proposed model to the stable coalition state. In each iteration of the algorithm, the chosen UAV updates its coalition selection and makes a comparative update under Pareto order, while all the other UAVs maintain their current selection strategy. Learning from Theorem 1, the stable solution of
can be solved out. In the following table, Algorithm 2 demonstrates procedures of CSPDA-PO. In Equation (
16),
represents the coalition selection probability function of UAV
n.
is the learning parameter (
> 0).
Combining the existence of NE in with the existence of stable coalition partition in , our proposed method can converge the problem to a stable state solution.
| Algorithm 2. Coalition selection and position deployment algorithm based on Pareto order (CSPDA-PO). |
Initialization: Set j = 1 and the position of central UAV , initialize UAVs’ state and mission area I’s state . Specially, each UAV chooses different coalition from .
Loop:
Step 1: All UAVs in the network exchange information (coverage deployment and coalition selection) with each other.
Step 2: Randomly select one UAV at each iteration, says n. Input UAVs’ current position profiles to Algorithm 1 and obtain optimal coverage deployment under given coalition selections of UAVs. .
Step 3: All the other UAVs repeat the previous coalition selection, i.e., . For the choosing UAV n, it changes its coalition selection to . Update and input to Algorithm 1, obtain optimal coverage deployment under a given coalition selection for UAV n. .
Step 4: Set ; then, UAV n calculates its coverage utility on the original and expected coalition and updates its strategy according to Definition 4 (Pareto order), where the relationships of utility are explored using probability formula according to Equation (21):
where is the learning parameter () and can be used to adjust convergence performance and speed.
Step 5: . If the stop criterion* is satisfied, output UAVs’ state ; otherwise, go to Step 1. |
| * Stop criterion can be described as the following rules: is more than a certain value like 0.98 or j reaches a predefined maximum number of iteration steps. |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





