Spherical-Model-Based SLAM on Full-View Images for Indoor Environments


Abstract
:Featured Application
Abstract
1. Introduction
2. Related Works
2.1. Omnidirectional Image Sensor
2.2. Omnidirectional-Vision SLAM
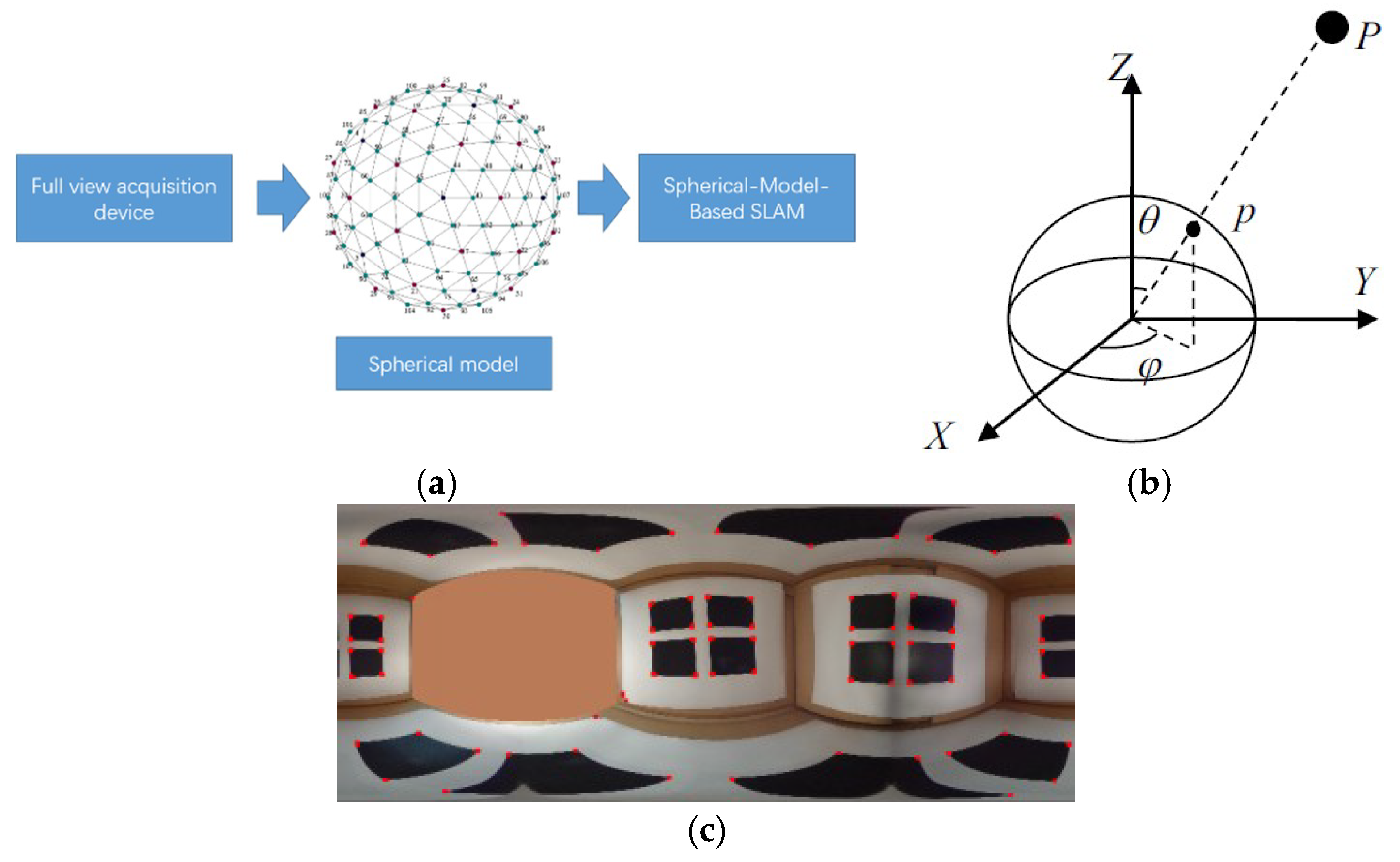
3. Camera Model and Full-View Image
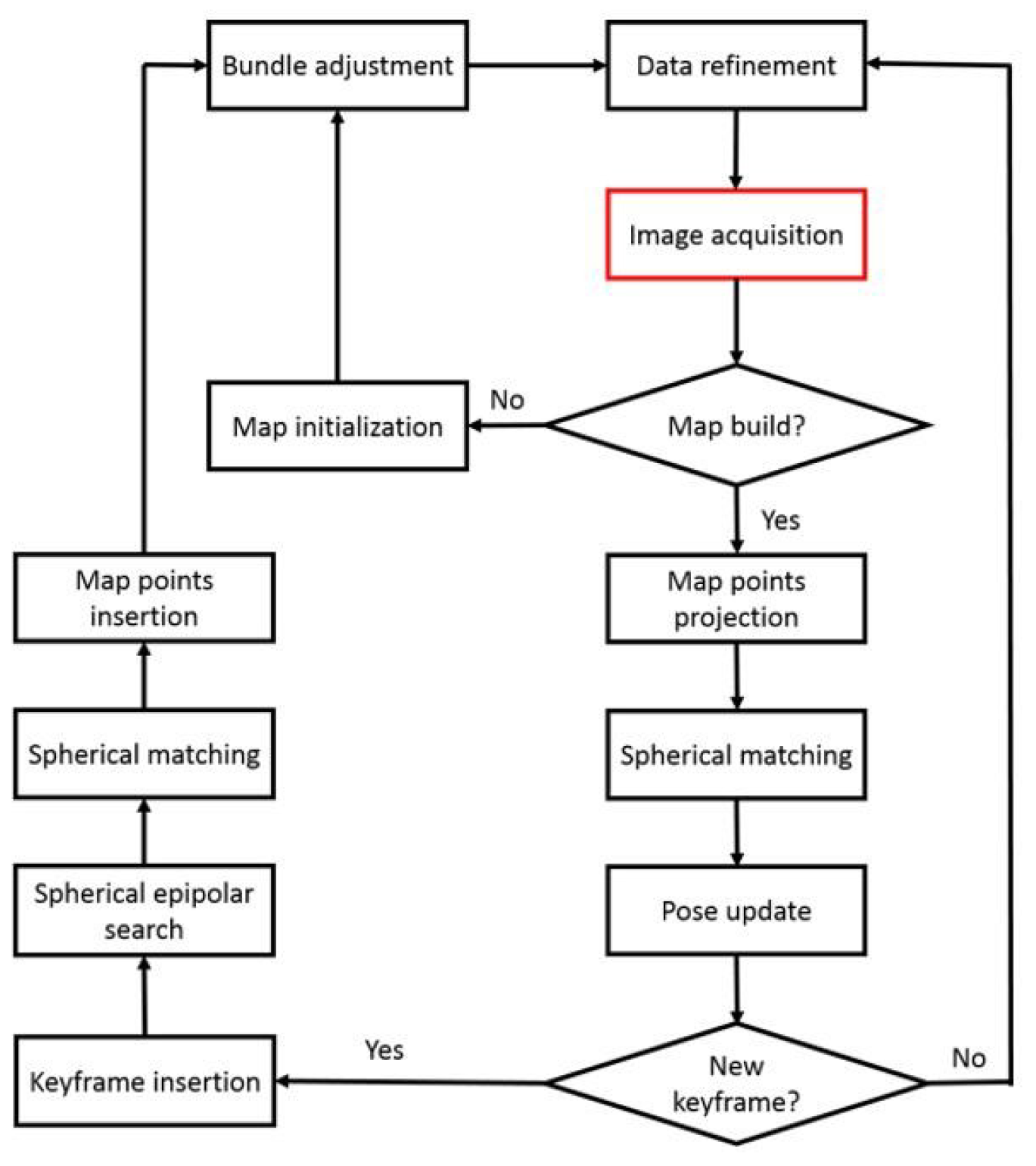
4. Method Overview
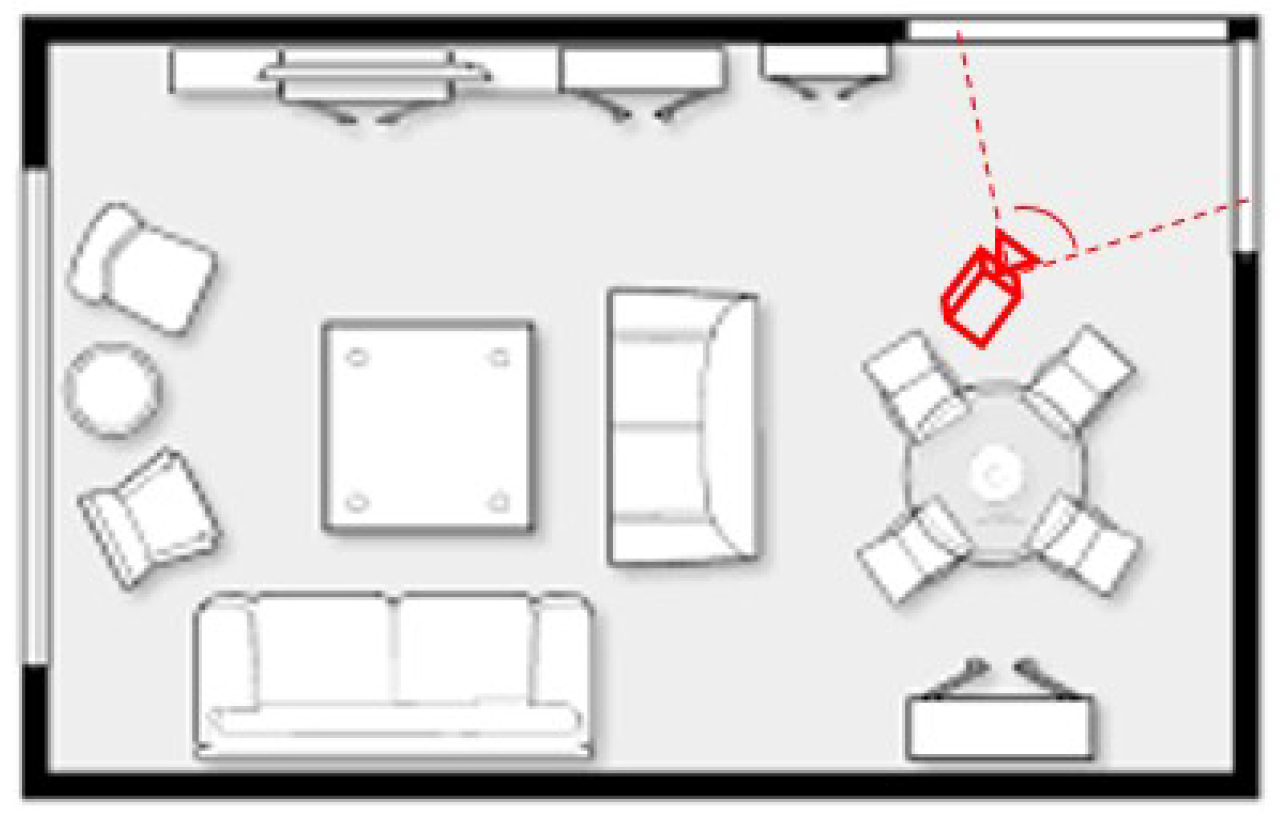
4.1. Image Acquisition
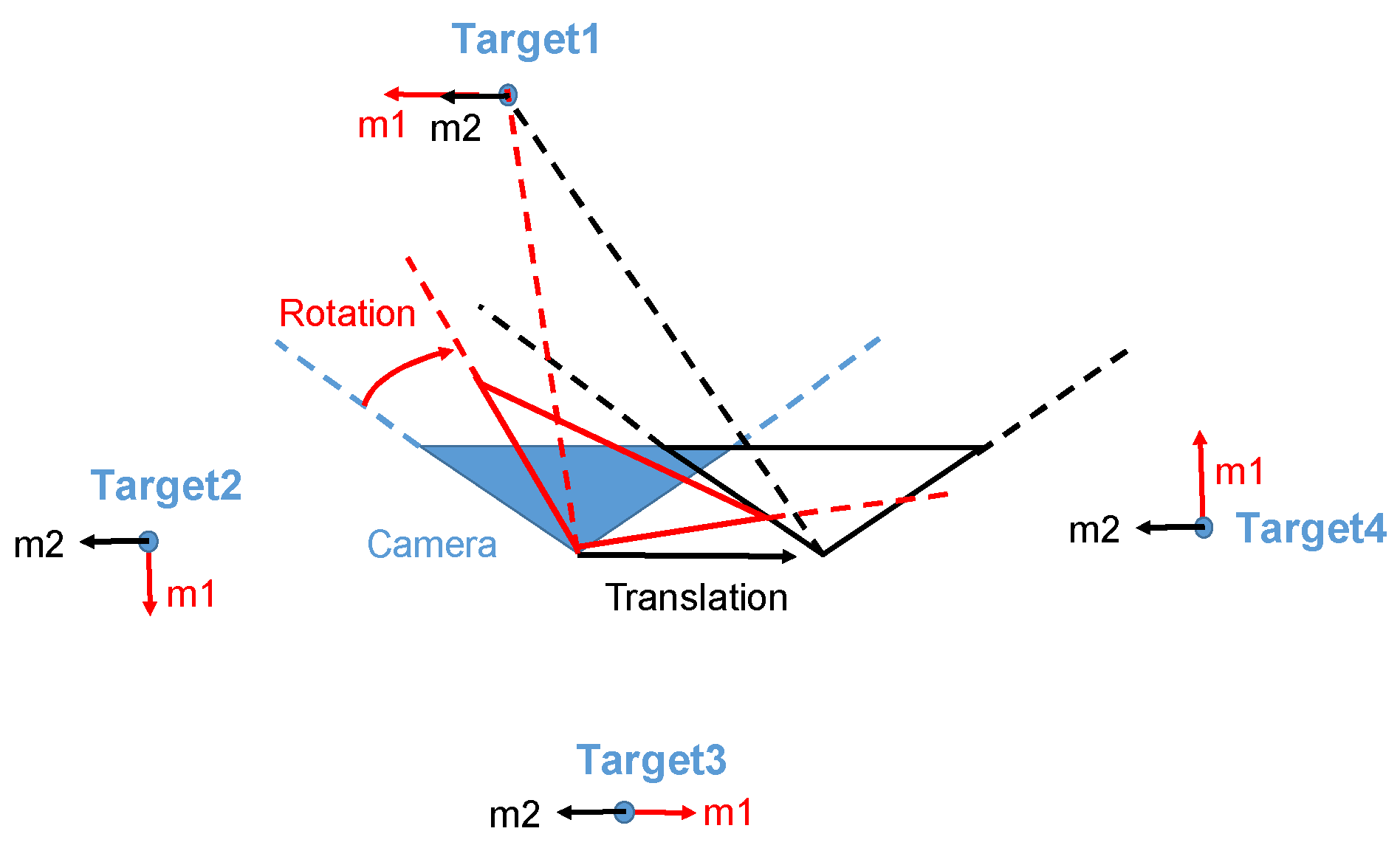
4.2. Map Initialization
4.3. Map Point Projection and Pose Update
4.4. Two-Stage Coarse-to-Fine Tracking
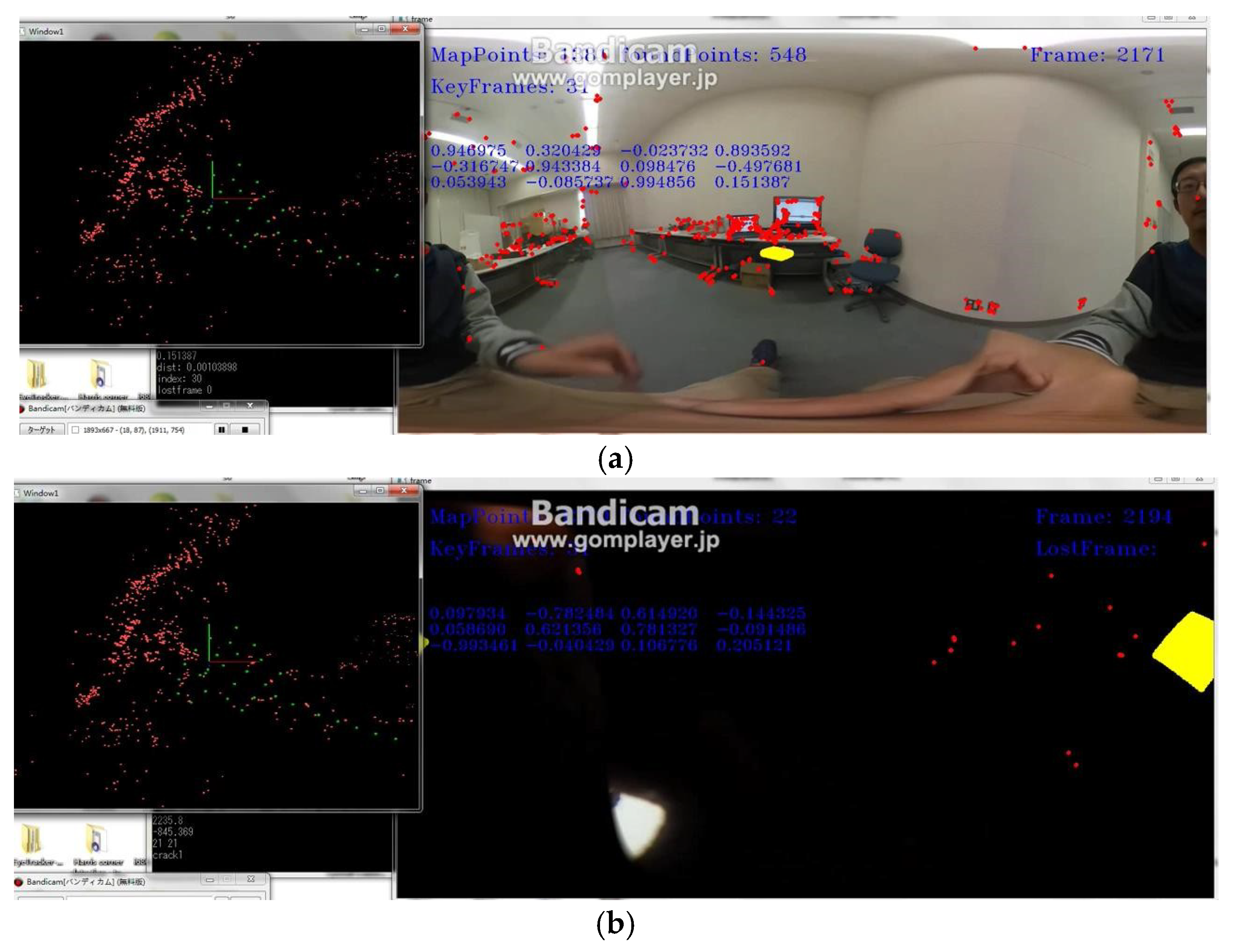
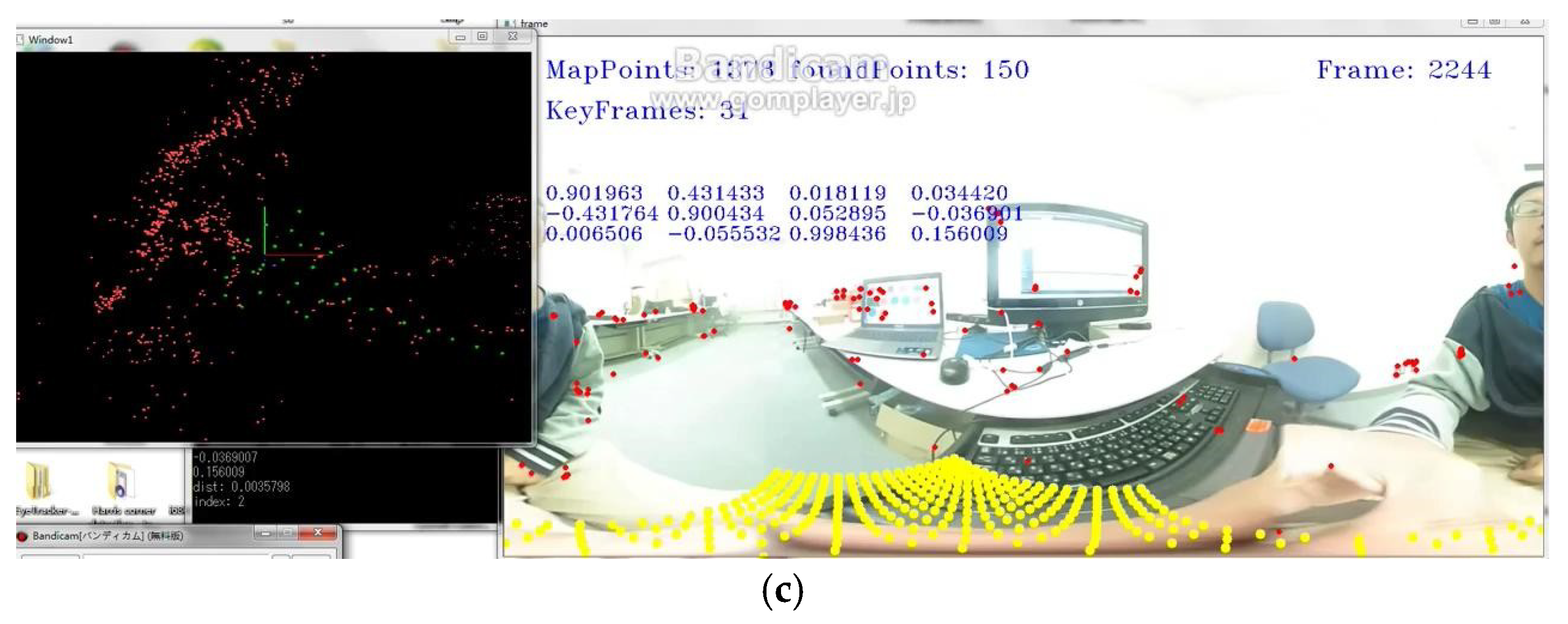
4.5. Tracking Recovery
4.6. Keyframe and Map Point Insertion
- The tracking did not fail at this frame;
- The recovery procedure has not been activated in the past few frames;
- The distance from the nearest keyframe is greater than a minimum distance;
- The time since the last keyframe was added should exceed some frames.
4.7. Spherical Epipolar Search
4.8. Data Refinement
5. Validation
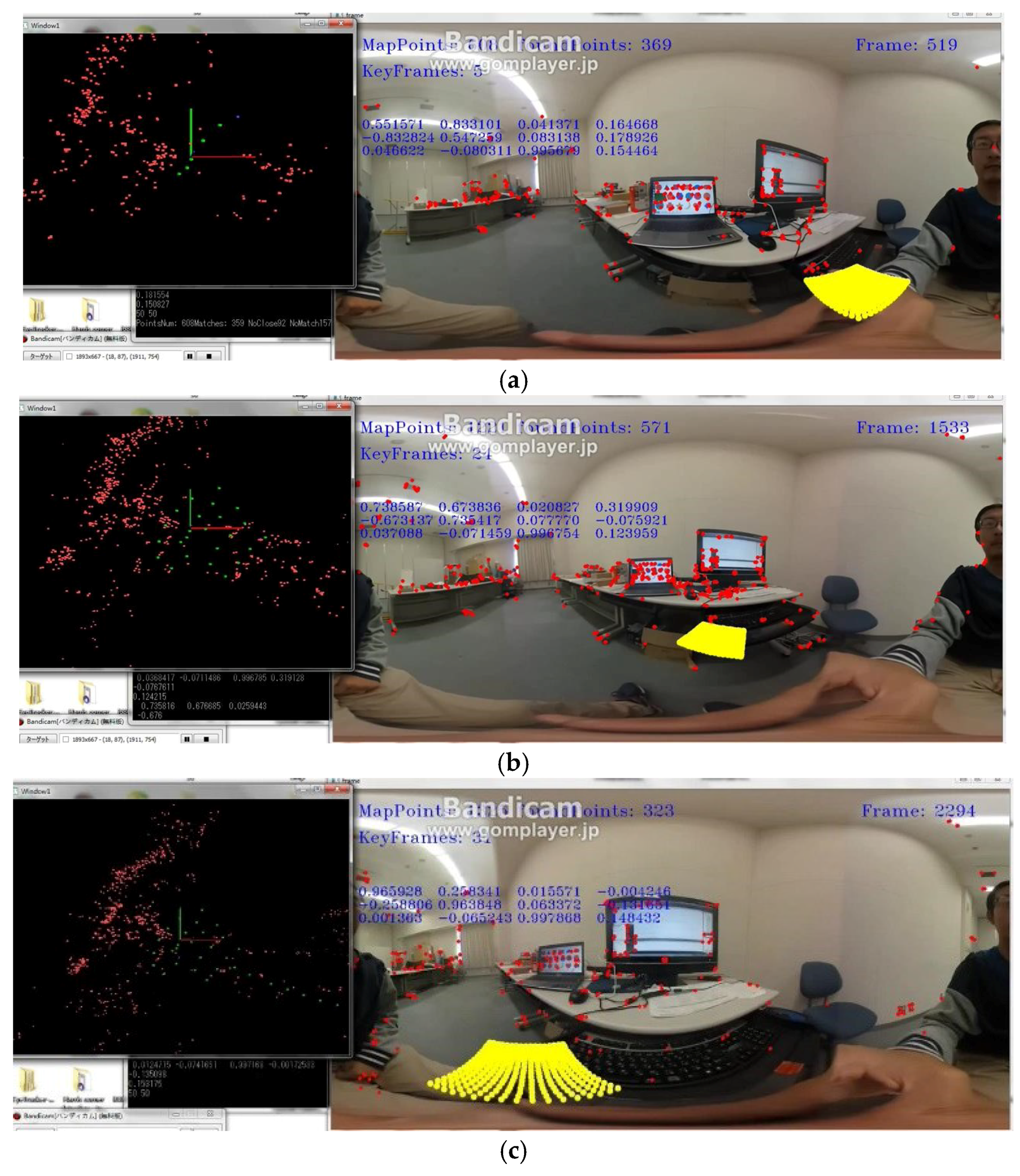
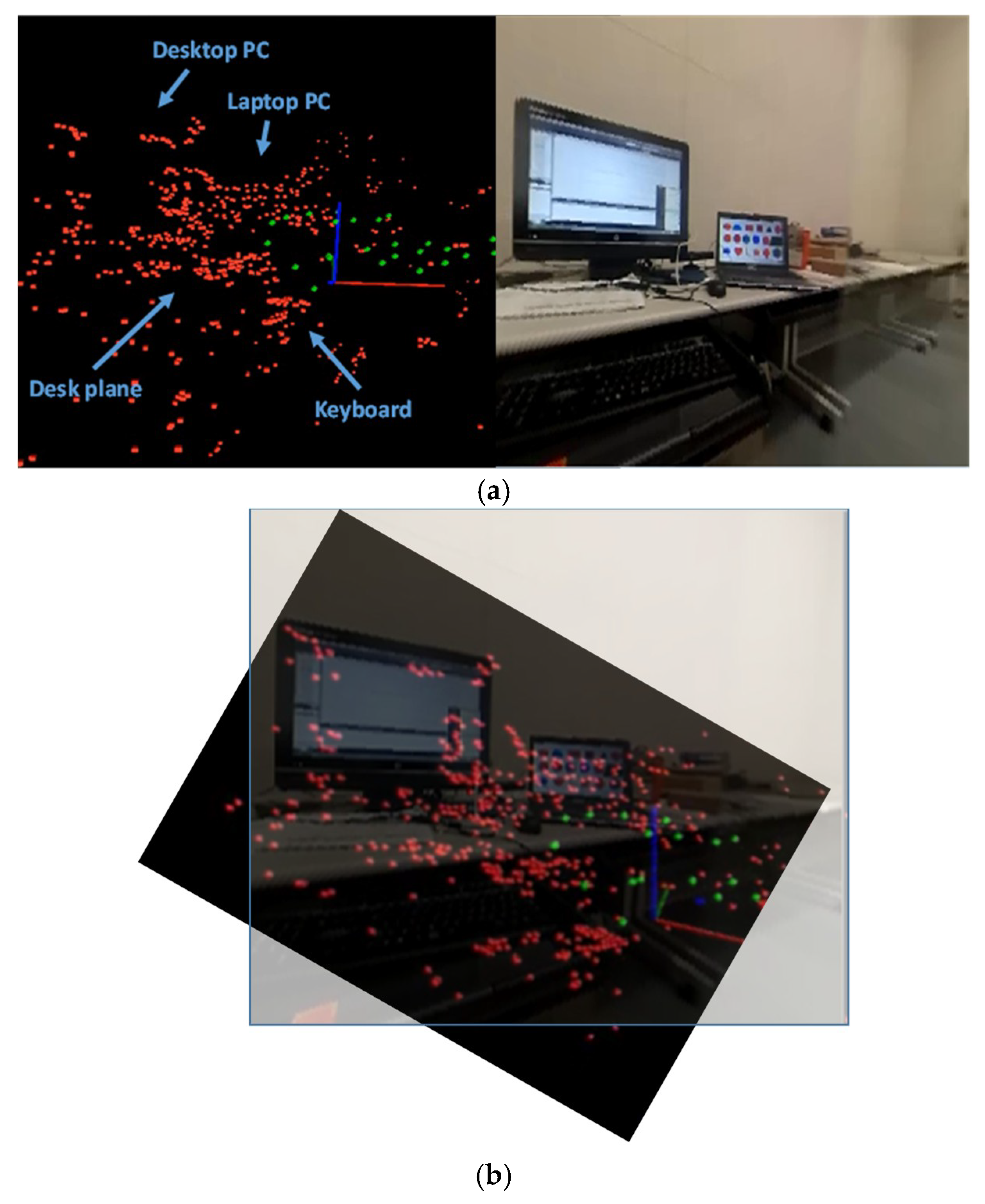
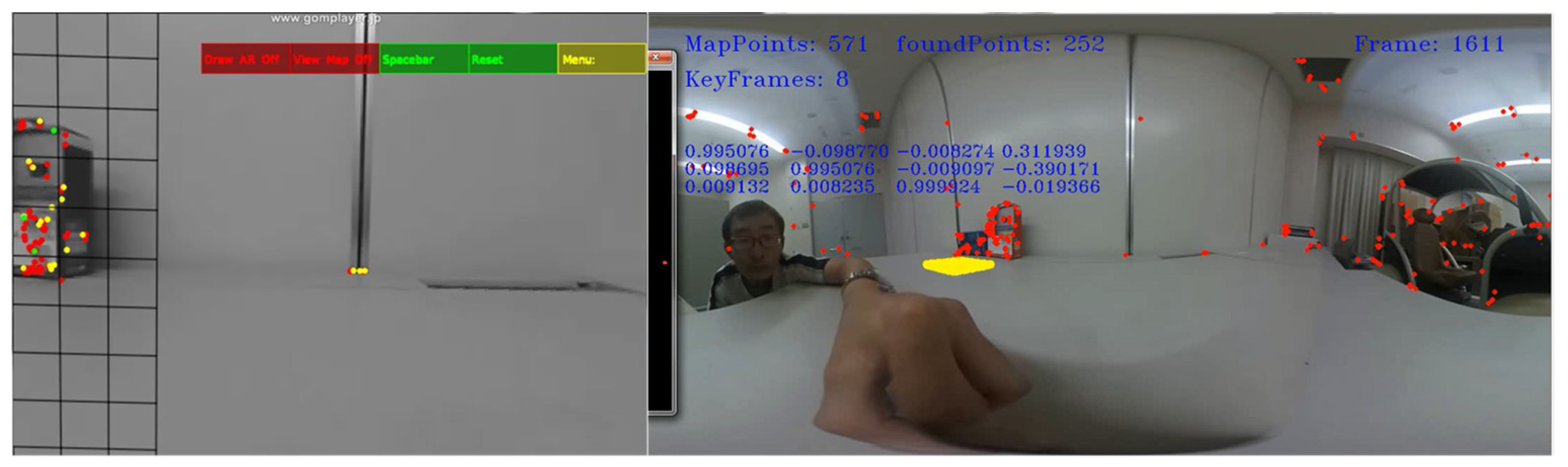
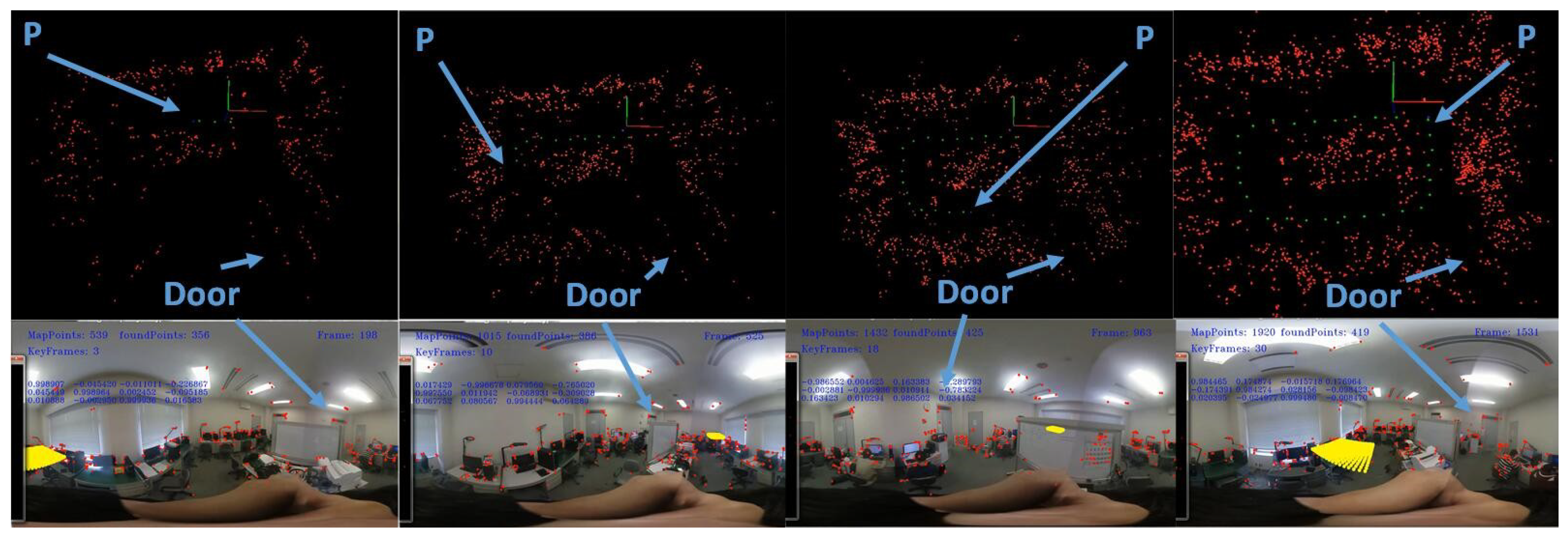
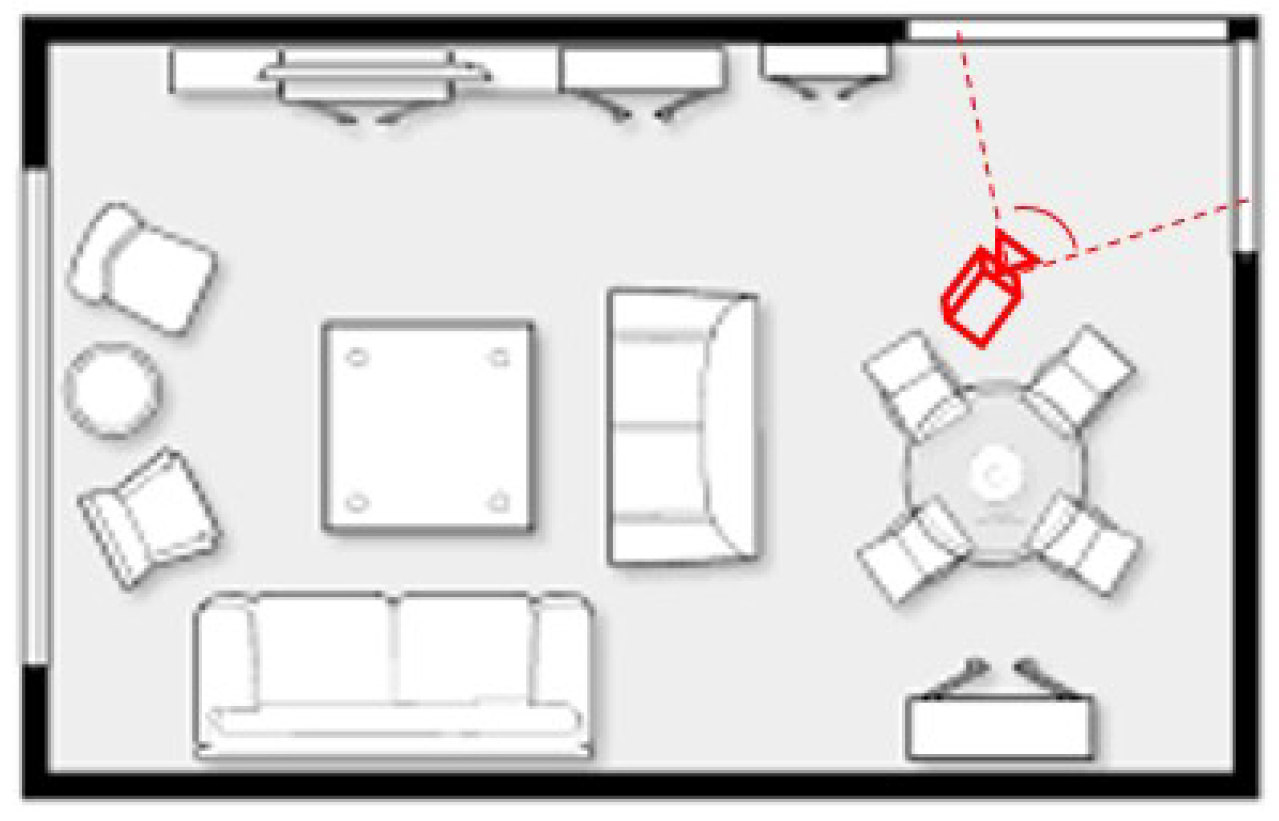
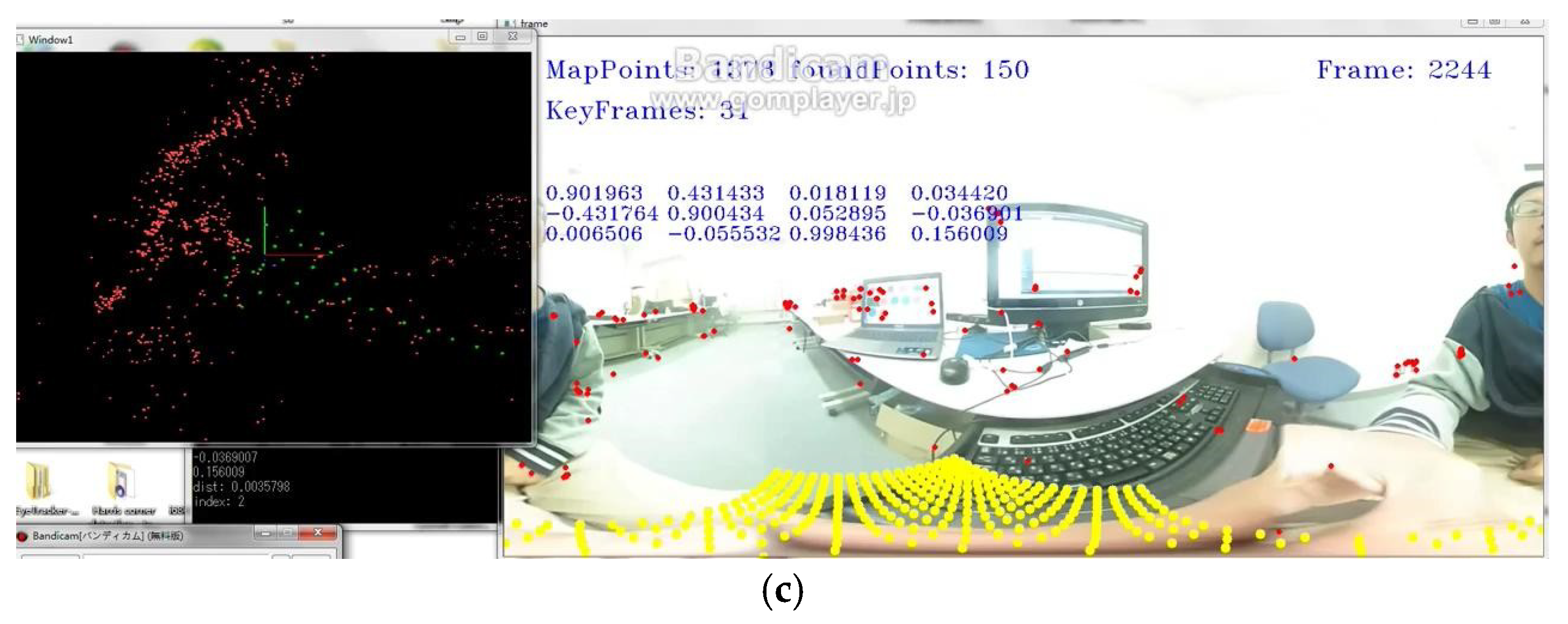
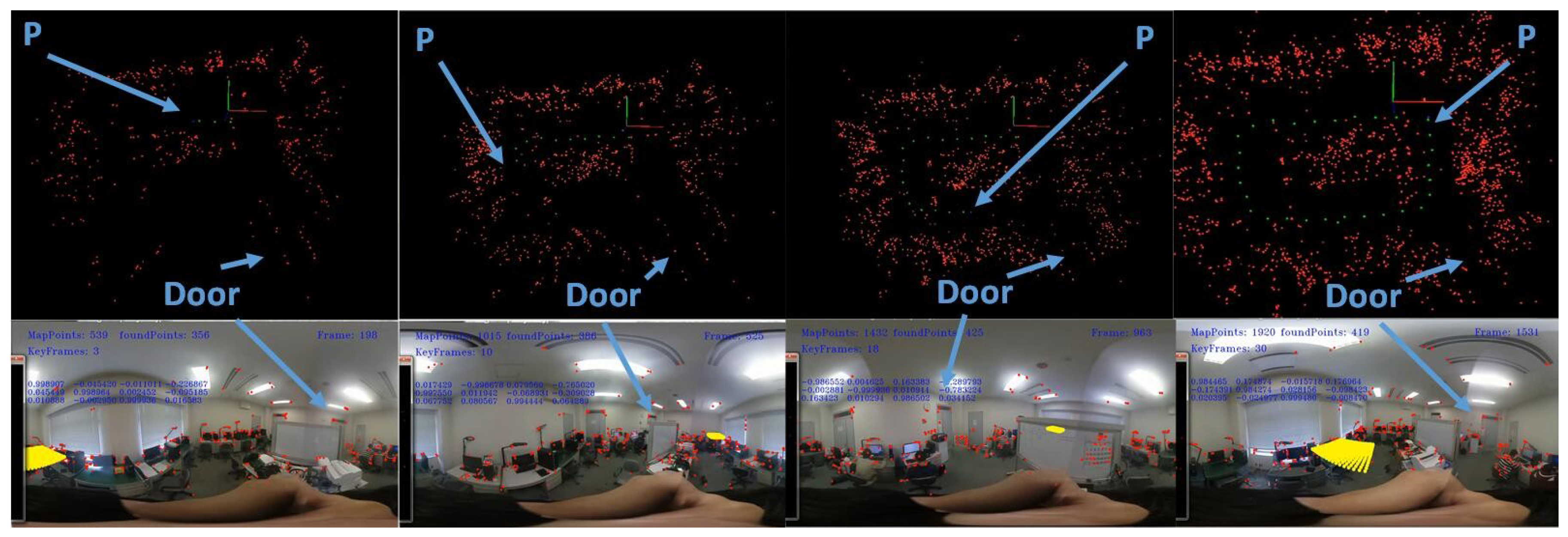
5.1. Functions Test
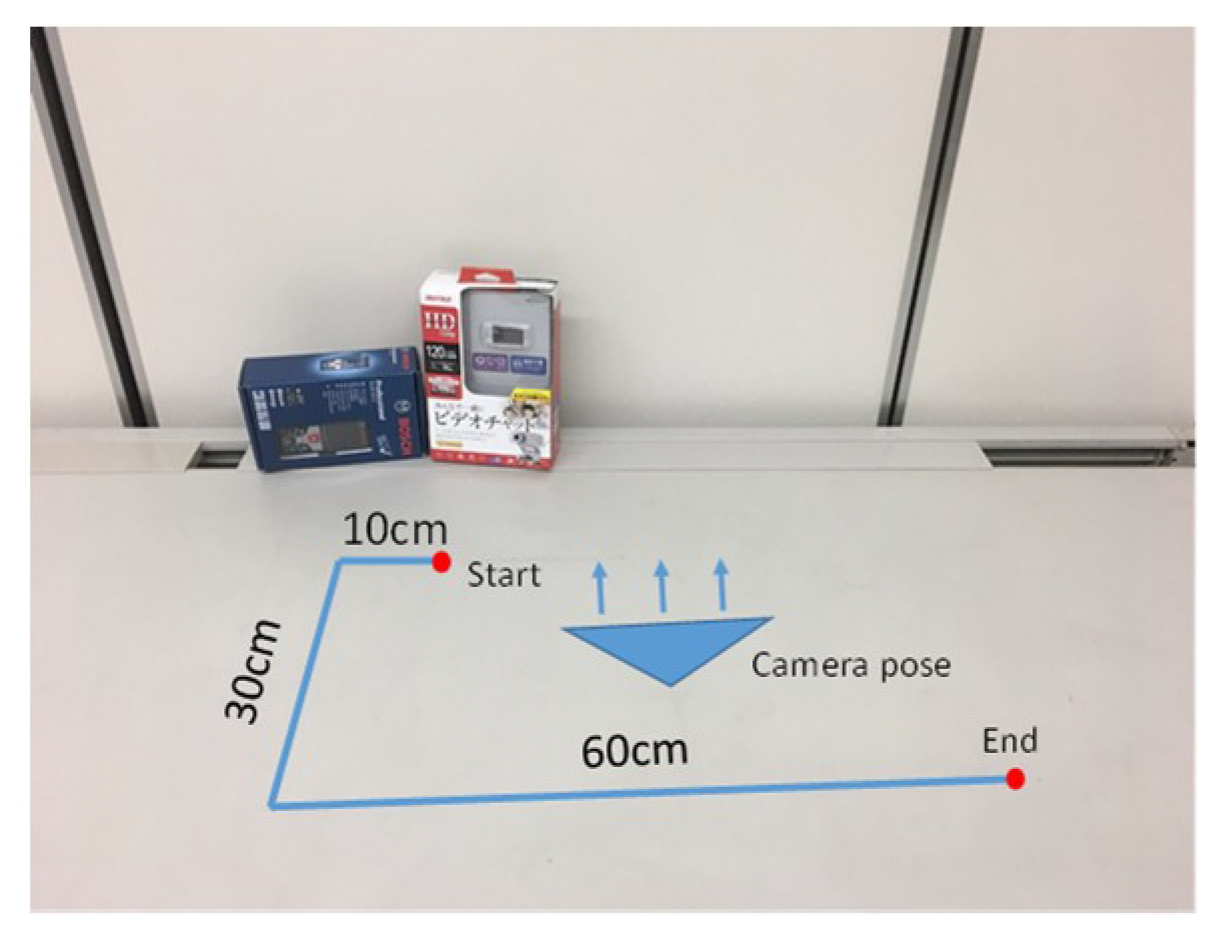
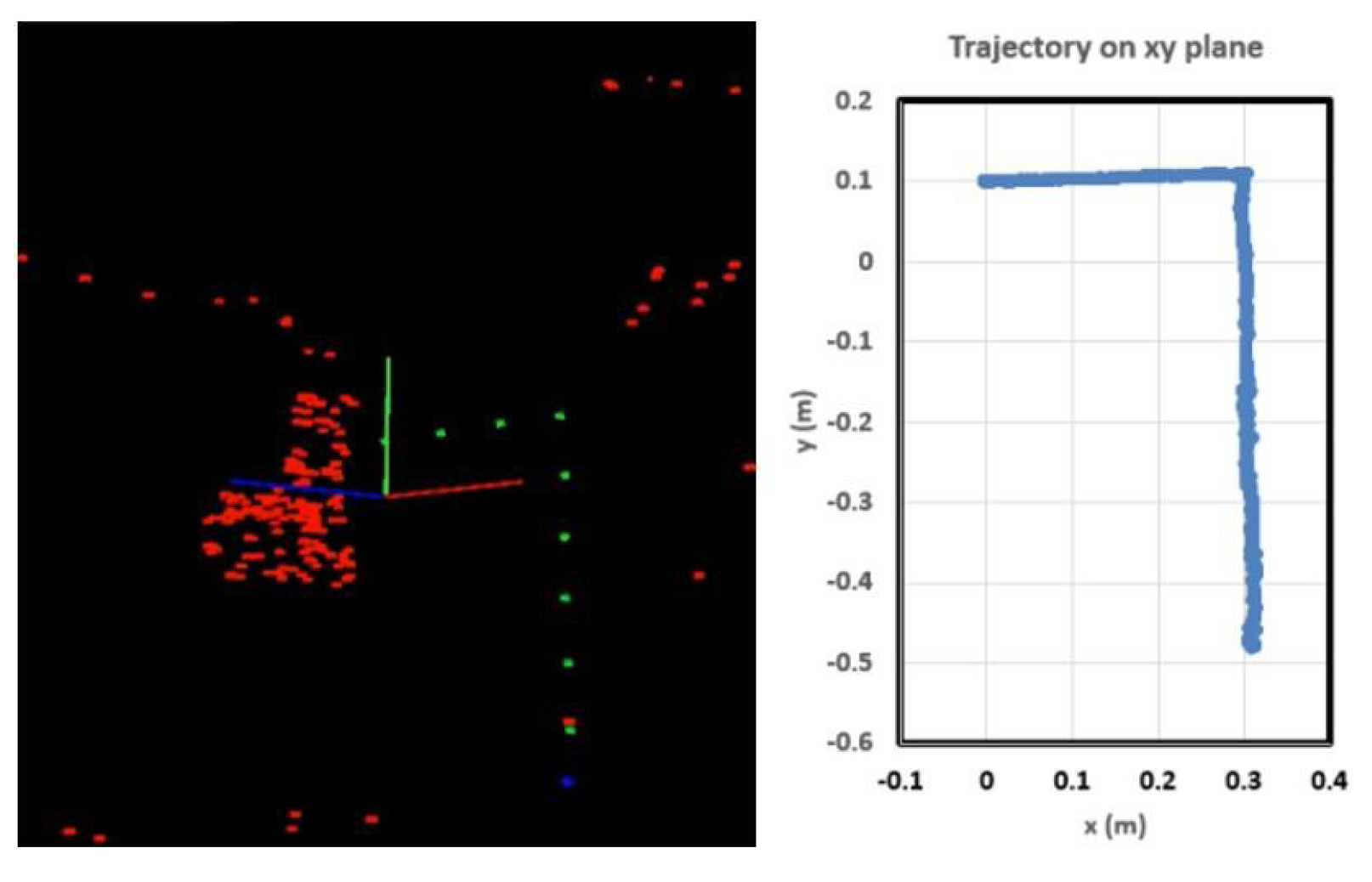
5.2. Accuracy Test
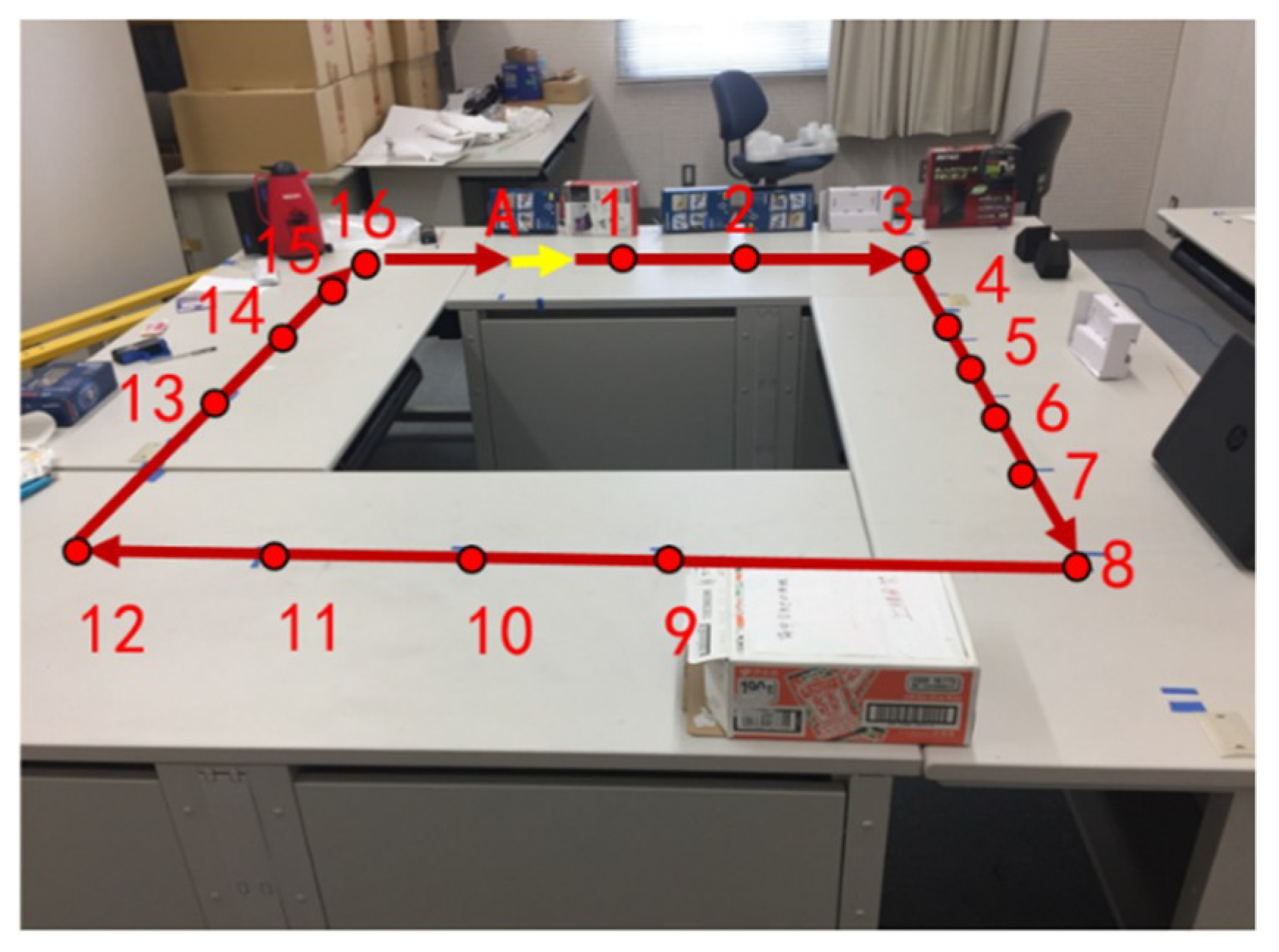
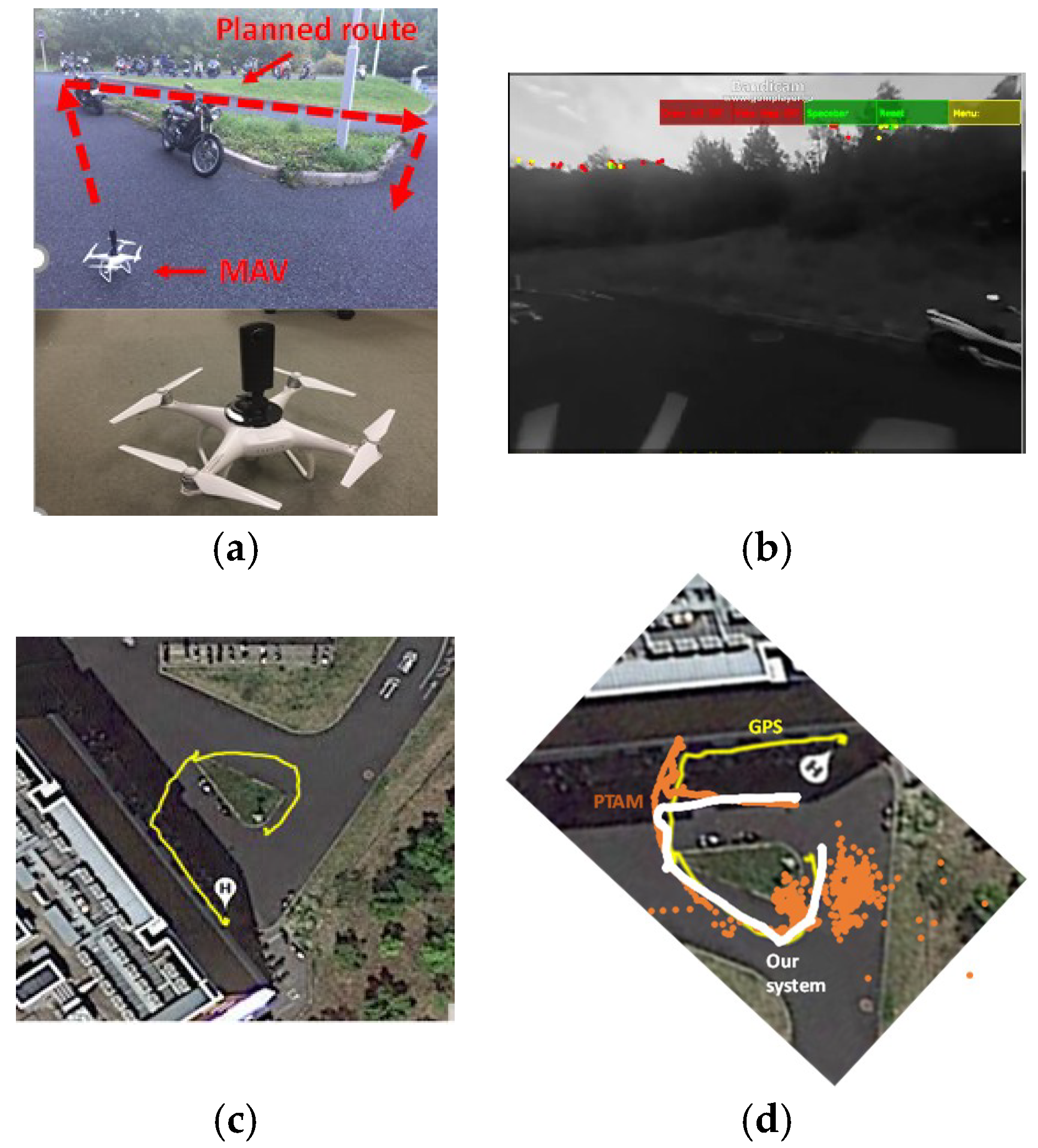
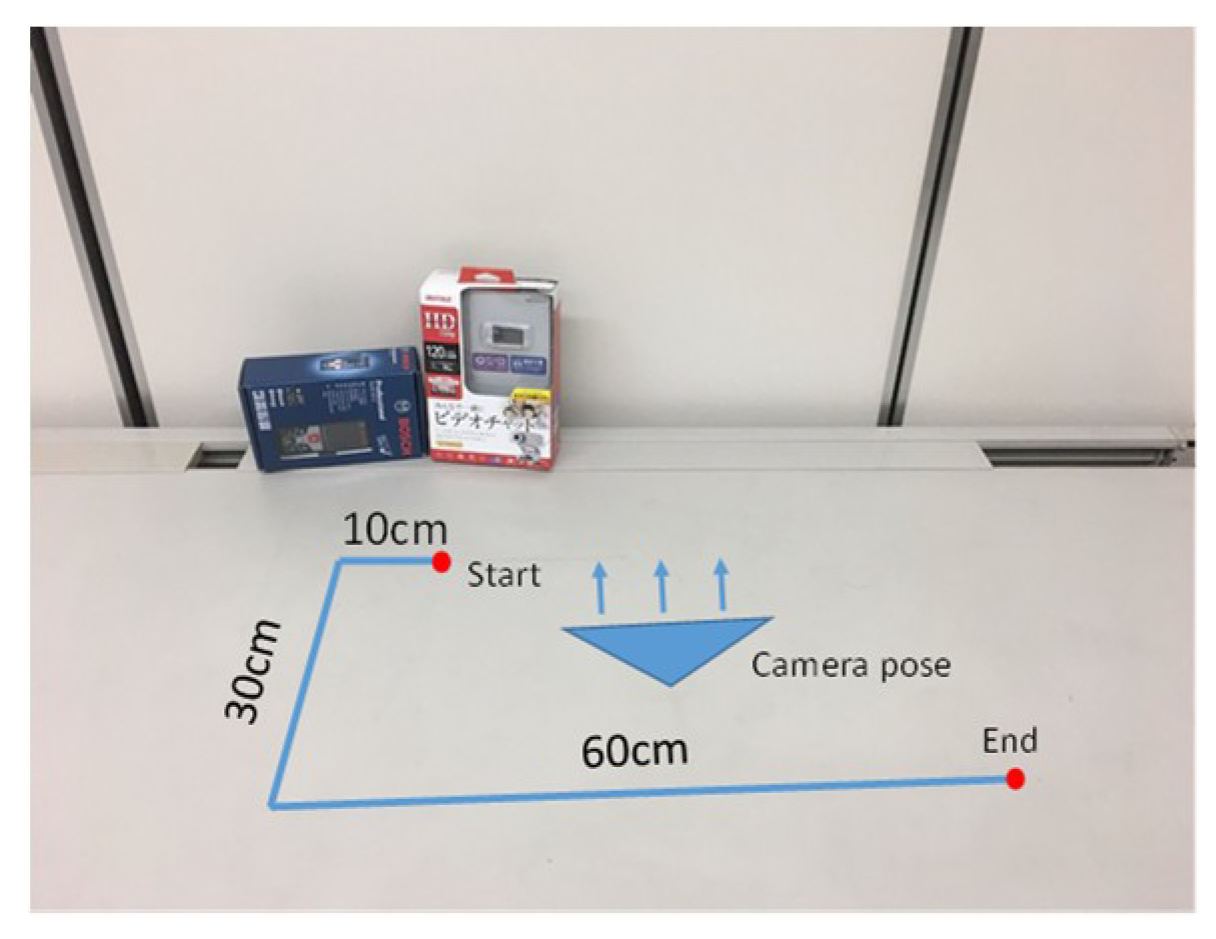
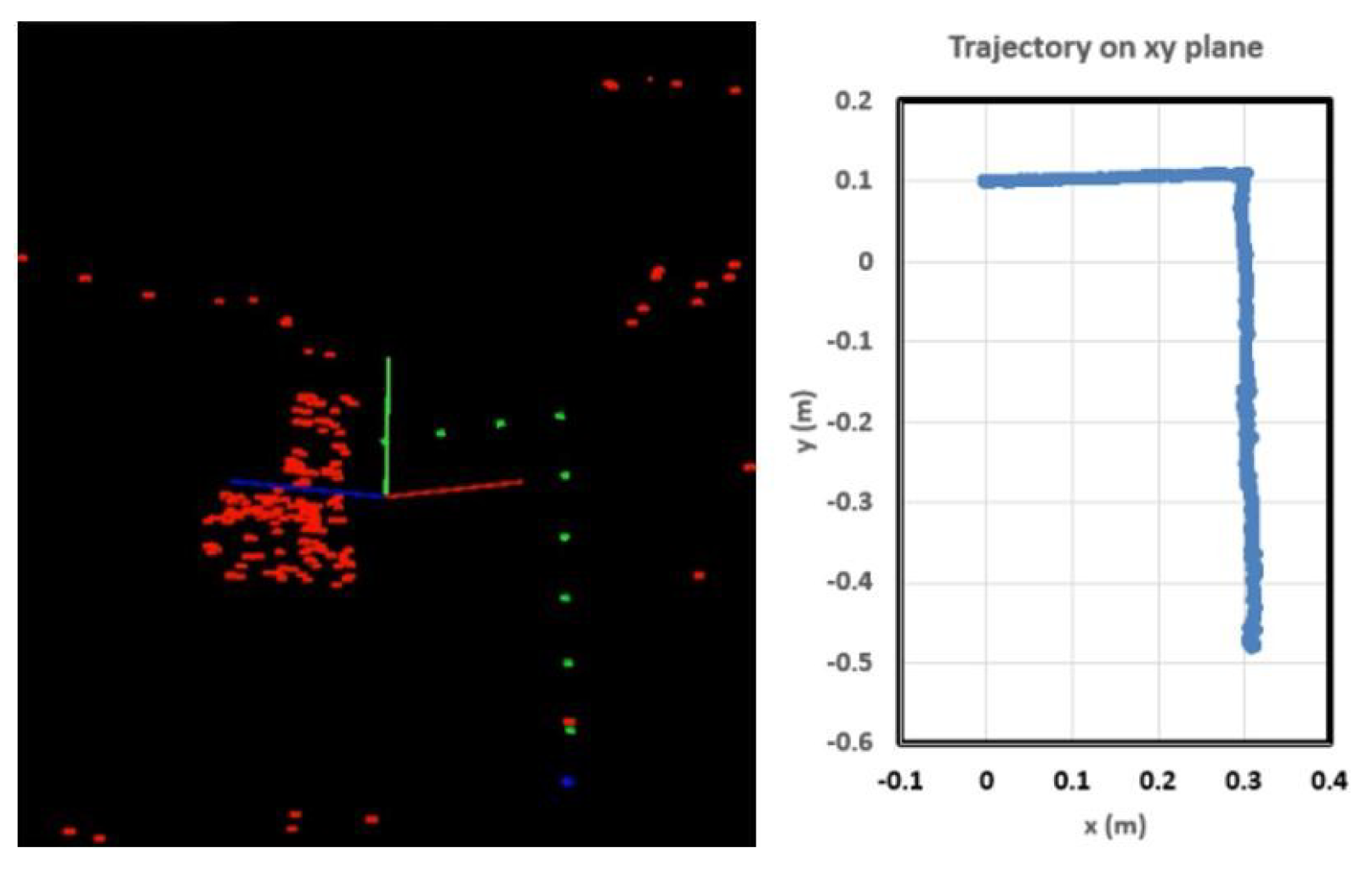
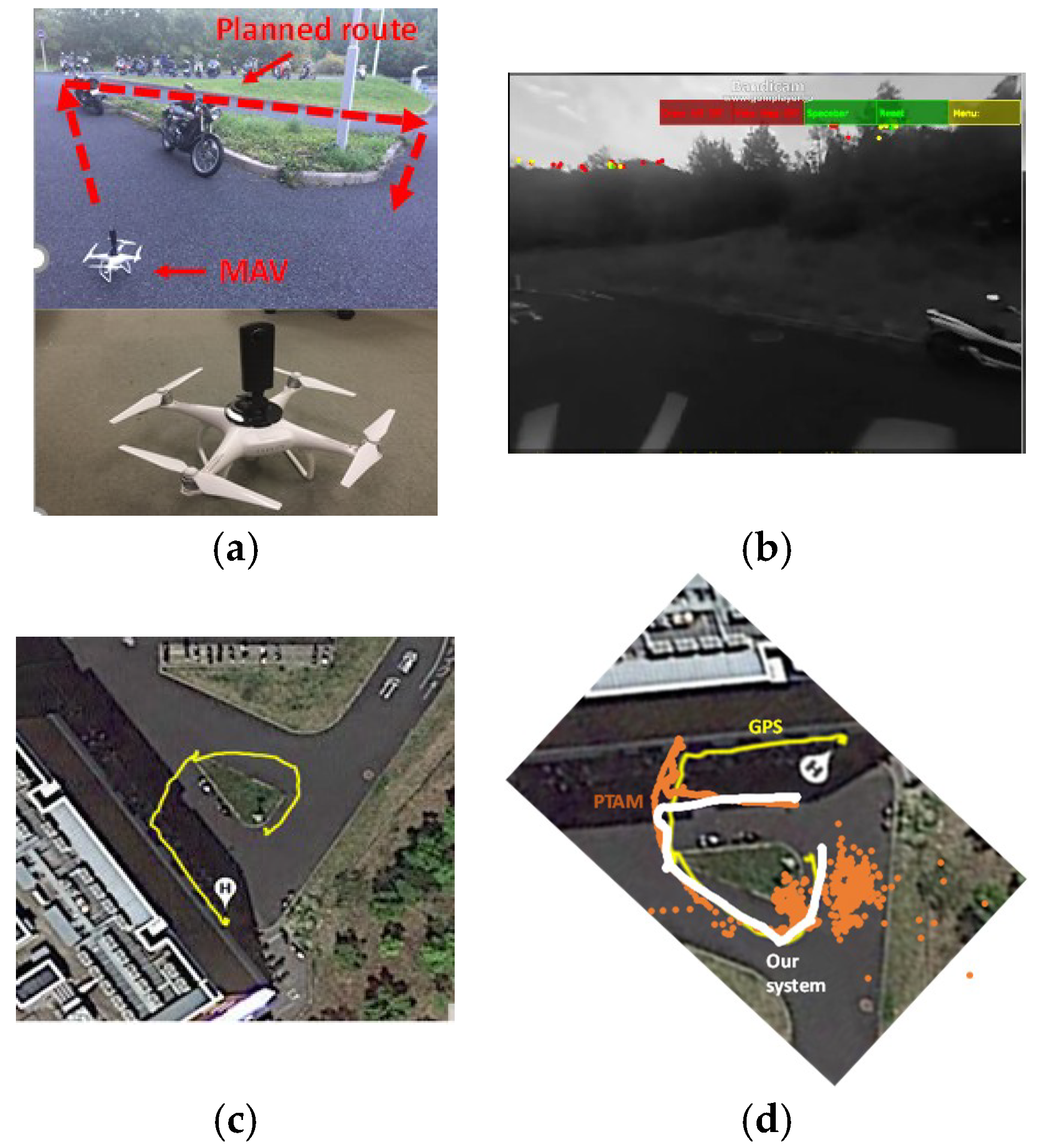
5.3. Route Test
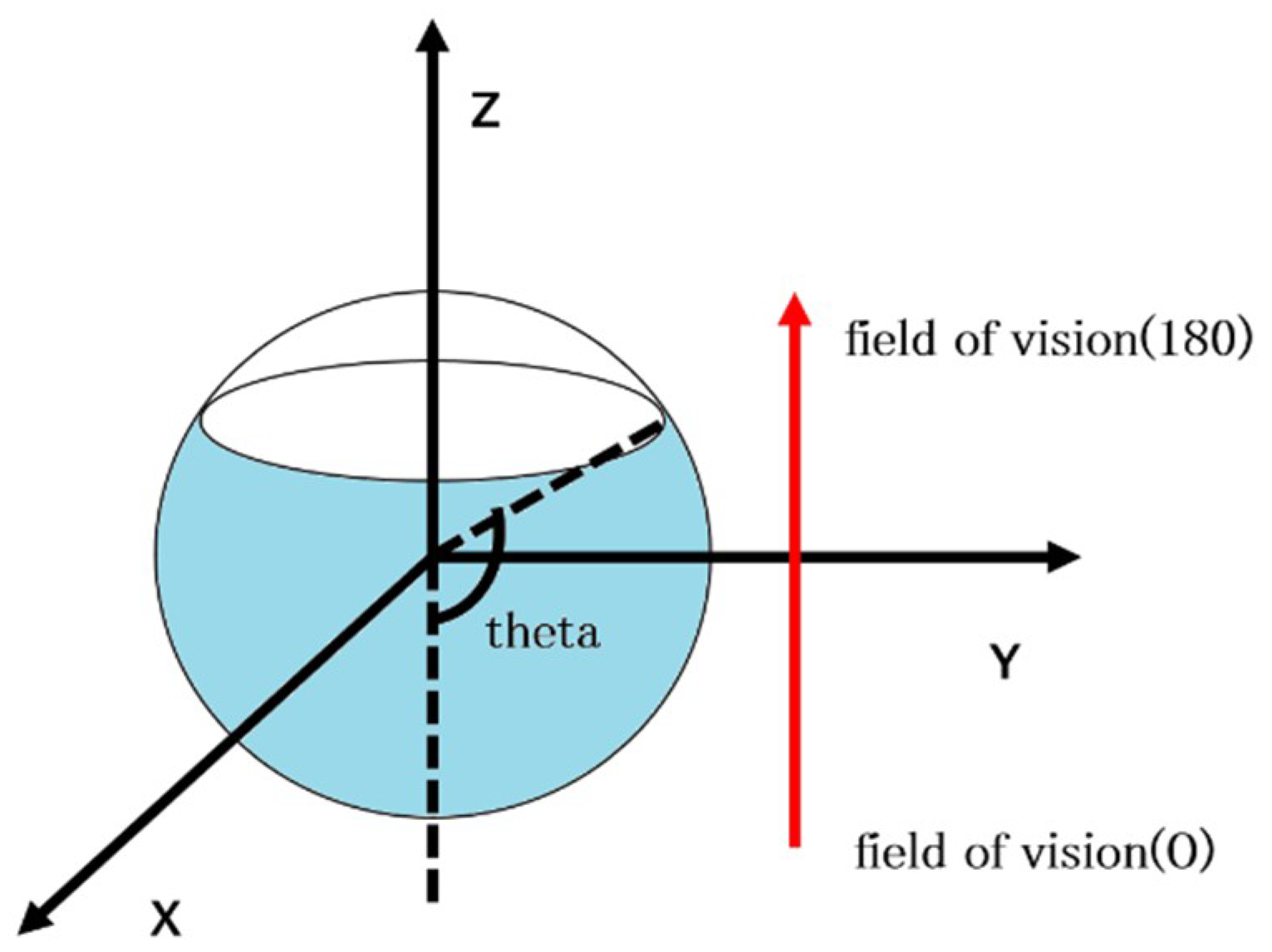
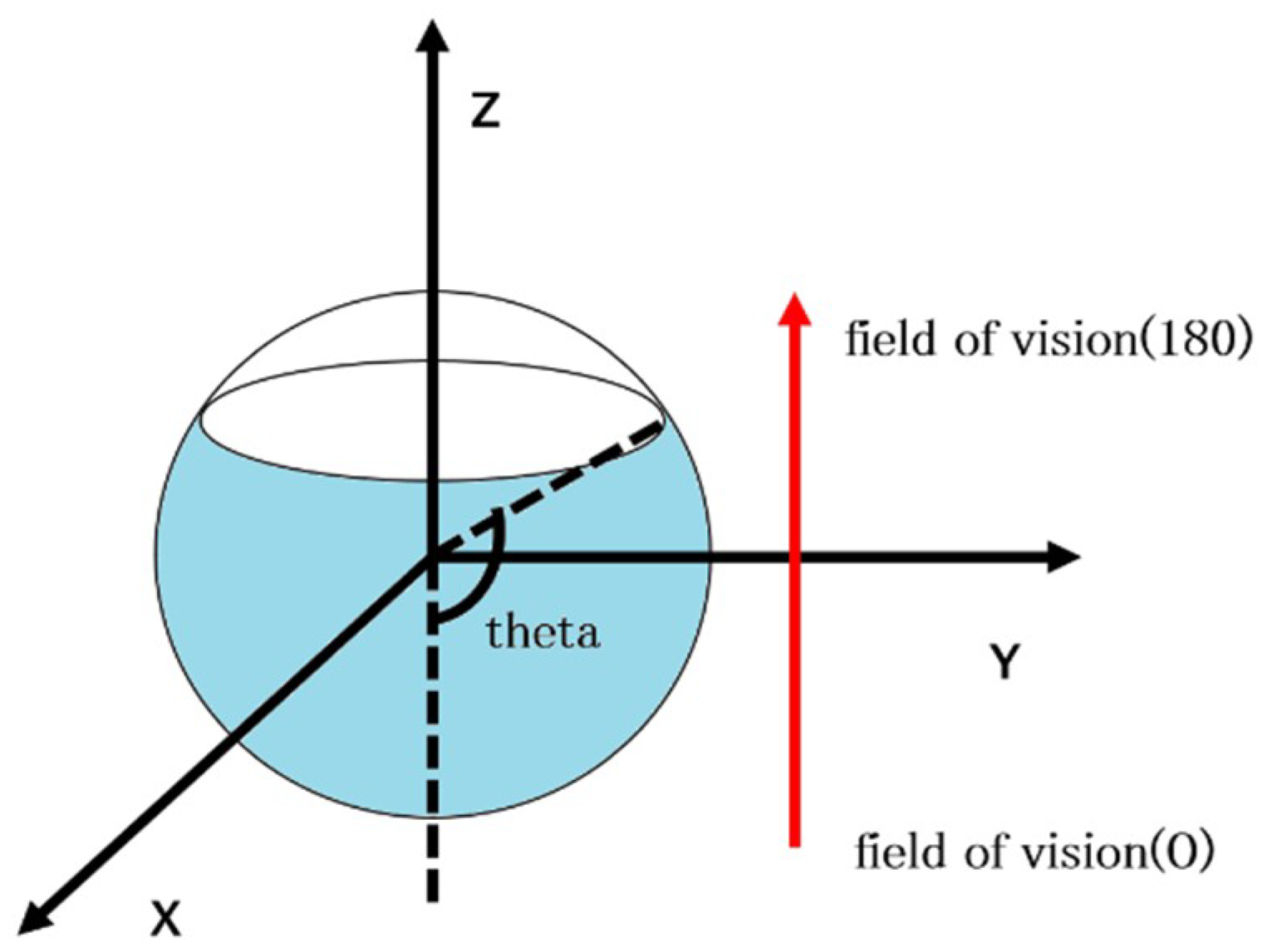
5.4. Accuracy Validation with a Decrease in the Field of View
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Klein, G.; Murray, D. Parallel tracking and mapping for small AR workspaces. In Proceedings of the 6th IEEE/ACM ISMAR, Nara, Japan, 13–16 November 2007; pp. 225–234. [Google Scholar]
- Available online: https://theta360.com/en/ (accessed on 1 October 2018).
- Miyamoto, K. Fish eye lens. J. Opt. Soc. Am. 1964, 54, 1060–1061. [Google Scholar] [CrossRef]
- Hong, J.; Tan, X.; Pinette, B.; Weiss, R.; Riseman, E.M. Image-based Homing. In Proceedings of the 1991 IEEE International Conference on Robotics Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 620–625. [Google Scholar]
- Yagi, Y.; Kawato, S.; Tsuji, S. Real-time omni-directional vision for robot navigation. Trans. Robot. Autom. 1994, 10, 11–22. [Google Scholar] [CrossRef]
- Yamazawa, K.; Yagi, Y.; Yachida, M. Omnidirectional imaging with hyperboloidal projection. In Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems, Yokohama, Japan, 26–30 July 1993; pp. 1029–1034. [Google Scholar]
- Nayar, S.K. Catadioptric omnidirectional camera. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 482–488. [Google Scholar]
- Li, S. Full-view spherical image camera. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; pp. 386–390. [Google Scholar]
- Fuentes-Pacheco, J.; Ruiz-Ascencio, J.; Rendon-Mancha, J. Visual simultaneous localization and mapping: A survey. Artif. Intell. Rev. 2015, 43, 55–81. [Google Scholar] [CrossRef]
- Rituerto, A.; Puig, L.; Guerrero, J.J. Visual SLAM with an omnidirectional camera. In Proceedings of the 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 348–351. [Google Scholar]
- Gutierrez, D.; Rituerto, A.; Montiel, J.M.M.; Guerrero, J.J. Adapting a real-time monocular visual SLAM from conventional to omnidirectional cameras. In Proceedings of the IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; pp. 343–350. [Google Scholar]
- Valiente, D.; Jadidi, M.G.; Miró, J.V.; Gil, A.; Reinoso, O. Information-based view initialization in visual SLAM with a single omnidirectional camera. Robot. Auton. Syst. 2015, 72, 93–104. [Google Scholar] [CrossRef]
- Gamallo, C.; Mucientes, M.; Regueiro, C.V. Omnidirectional visual SLAM under severe occlusions. Robot. Auton. Syst. 2015, 65, 76–87. [Google Scholar] [CrossRef]
- Chapoulie, A.; Rives, P.; Filliat, D. A spherical representation for efficient visual loop closing. In Proceedings of the IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; pp. 335–342. [Google Scholar]
- Caruso, D.; Engel, J.; Cremers, D. Large-scale direct SLAM for omnidirectional cameras. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots Syst. (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 141–148. [Google Scholar]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Visual Odometry [Tutorial]. Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Sato, T.; Ikeda, S.; Yokoya, N. Extrinsic Camera Parameter Recovery from Multiple Image Sequences Captured by an Omni-Directional Multi-camera System. In Proceedings of the European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; Volume 2, pp. 326–340. [Google Scholar]
- Pagani, A.; Stricker, D. Structure from Motion using full spherical panoramic cameras. In Proceedings of the IEEE International Conference on Computer Vision Workshops IEEE, Barcelona, Spain, 6–13 November 2011; pp. 375–382. [Google Scholar]
- Scaramuzza, D.; Martinelli, A.; Siegwart, R. A Flexible Technique for Accurate Omnidirectional Camera Calibration and Structure from Motion. In Proceedings of the IEEE International Conference on Computer Vision Systems IEEE, New York, NY, USA, 4–7 January 2006; p. 45. [Google Scholar]
- Nayar, S.K.; Baker, S. Catadioptric image formation. In Proceedings of the Darpa Image Understanding Workshop, Bombay, India, 1–4 January 1998; Volume 35, pp. 35–42. [Google Scholar]
- Swaminathan, R.; Nayar, S.K. Nonmetric Calibration of Wide-Angle Lenses and Polycameras. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1172–1178. [Google Scholar] [CrossRef]
- Gaten, E. Geometrical optics of a galatheid compound eye. J. Comp. Physiol. A 1994, 175, 749–759. [Google Scholar] [CrossRef]
- Grossberg, M.D.; Nayar, S.K. A General Imaging Model and a Method for Finding its Parameters. Computer Vision. In Proceedings of the Eighth IEEE International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 108–115. [Google Scholar]
- Available online: https://theta360.com/en/about/theta/technology.html (accessed on 1 October 2018).
- Kim, J.S.; Hwangbo, M.; Kanade, T. Spherical Approximation for Multiple Cameras in Motion Estimation: Its Applicability and Advantages. Comput. Vis. Image Underst. 2010, 114, 1068–1083. [Google Scholar] [CrossRef]
- Zhao, Q.; Feng, W.; Wan, L.; Zhang, J. SPHORB: A fast and robust binary feature on the sphere. Int. J. Comput. Vis. 2015, 113, 143–159. [Google Scholar] [CrossRef]
- Triggs, B. Bundle adjustment—A modern synthesis. In International Workshop on Vision Algorithms; Springer: Berlin/Heidelberg, Germany, 1999; pp. 298–372. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
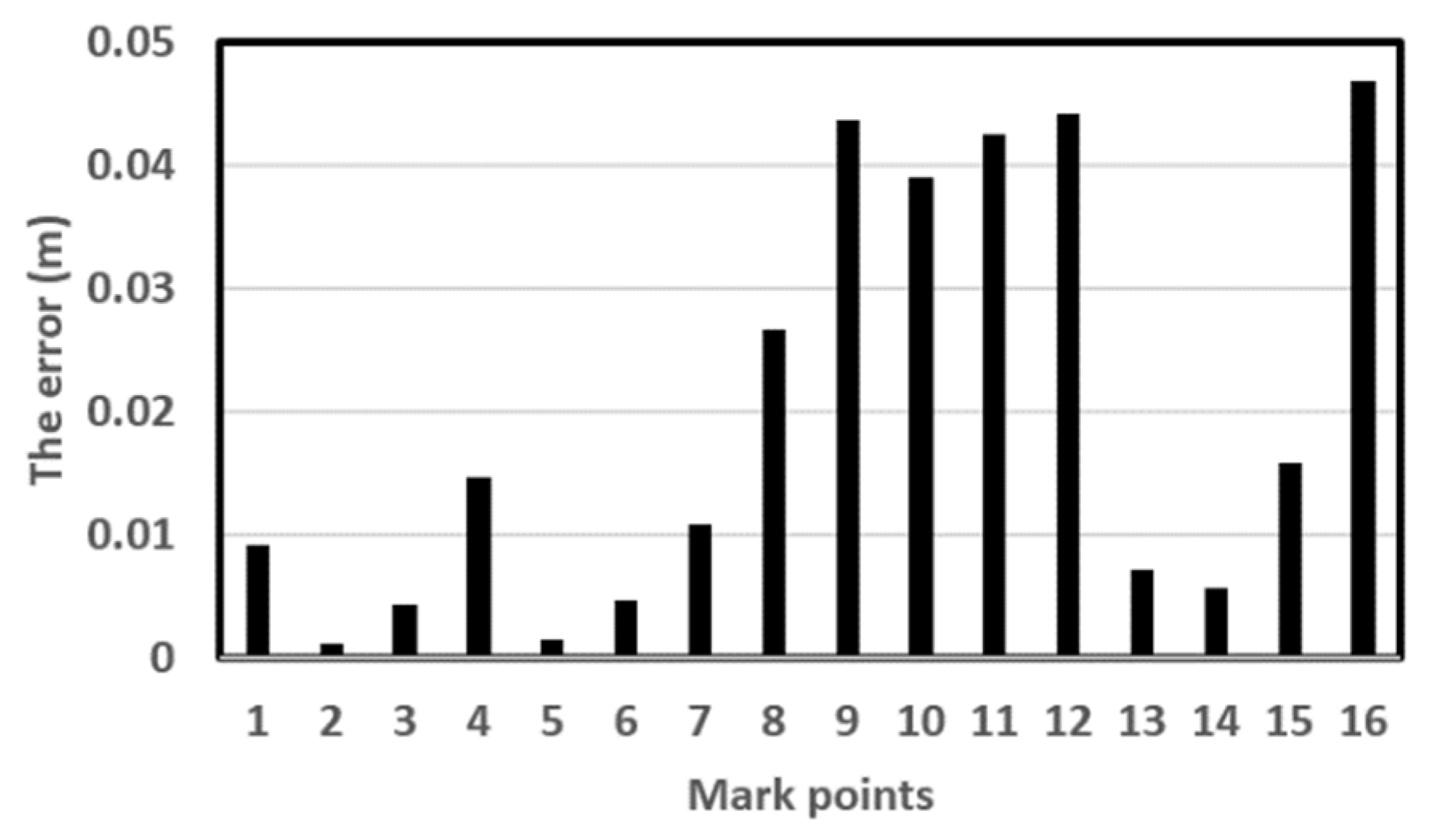
| Marked Point | Calculated Value (m) | Ground Truth (m) | Errors (m) |
|---|---|---|---|
| 1 | 0.290 | 0.299 | 0.009 |
| 2 | 0.601 | 0.602 | 0.001 |
| 3 | 1.086 | 1.082 | 0.004 |
| 4 | 1.131 | 1.116 | 0.015 |
| 5 | 1.241 | 1.239 | 0.002 |
| 6 | 1.401 | 1.406 | 0.005 |
| 7 | 1.604 | 1.615 | 0.011 |
| 8 | 1.830 | 1.857 | 0.027 |
| 9 | 1.546 | 1.590 | 0.044 |
| 10 | 1.482 | 1.521 | 0.039 |
| 11 | 1.473 | 1.516 | 0.043 |
| 12 | 1.515 | 1.559 | 0.044 |
| 13 | 0.998 | 1.001 | 0.007 |
| 14 | 0.735 | 0.741 | 0.006 |
| 15 | 0.506 | 0.522 | 0.016 |
| 16 | 0.378 | 0.425 | 0.047 |
| Average error = 0.020 m | |||
| Times | theta = 160 Deg. | theta = 140 Deg. | theta = 120 Deg. | theta = 100 Deg. | theta = 80 Deg. |
|---|---|---|---|---|---|
| 1 | 0.016 m | 0.213 m | 0.088 m | X | X |
| 2 | 0.184 m | 0.093 m | 0.294 m | X | X |
| 3 | 0.026 m | 0.037 m | 0.244 m | X | X |
| 4 | 0.026 m | 0.037 m | 0.244 m | X | X |
| 5 | 0.126 m | 0.078 m | 0.159 m | 0.158 m | X |
| 6 | 0.015 m | 0.301 m | 0.093 m | 0.187 m | X |
| 7 | 0.015 m | 0.097 m | 0.156 m | 0.170 m | 0.111 m |
| 8 | 0.015 m | 0.097 m | 0.156 m | 0.170 m | 0.111 m |
| 9 | 0.104 m | 0.076 m | 0.005 m | 0.032 m | 0.321 m |
| 10 | 0.077 m | 0.102 m | 0.027 m | 0.141 m | 0.315 m |
| Average error | 0.060 m | 0.113 m | 0.147 m | X | X |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, X.; Li, S. Spherical-Model-Based SLAM on Full-View Images for Indoor Environments. Appl. Sci. 2018, 8, 2268. https://doi.org/10.3390/app8112268
Li J, Wang X, Li S. Spherical-Model-Based SLAM on Full-View Images for Indoor Environments. Applied Sciences. 2018; 8(11):2268. https://doi.org/10.3390/app8112268
Chicago/Turabian StyleLi, Jianfeng, Xiaowei Wang, and Shigang Li. 2018. "Spherical-Model-Based SLAM on Full-View Images for Indoor Environments" Applied Sciences 8, no. 11: 2268. https://doi.org/10.3390/app8112268
APA StyleLi, J., Wang, X., & Li, S. (2018). Spherical-Model-Based SLAM on Full-View Images for Indoor Environments. Applied Sciences, 8(11), 2268. https://doi.org/10.3390/app8112268