Abstract
In order to prove the speed regulation for permanent magnet motor systems, a control method is proposed to reject the disturbance by cogging torque, which arises from the interaction of the rotor magnets with the steel teeth on the stator. Toward this aim, we present a state observer with an internal model which has harmonics of sinusoids, and it follows from the proposed observer that the information of the cogging disturbance is obtained. It shows that the disturbance is efficiently compensated by a suitable additional control input based on the estimated information. Simulation and experimental results with an actual permanent magnet motor verify the effectiveness of the proposed observer-based algorithm.
1. Introduction
High-precision motor control is one of the long-standing and critical issues in both academia and industry because they are used in many control applications [1]. Especially cogging, which arises from the interaction of the rotor magnets with the steel teeth on the stator, causes torque ripples and thus speed ripples in permanent magnet motor systems [2,3,4,5,6]. This may not be acceptable in some applications—in particular for low speed regulation. Thus it is not surprising that there have been a tremendous amount of studies for eliminating the cogging disturbance over the course of several decades [7,8,9,10,11,12].
More recently, under an assumption that the cogging torque can be expressed by a state-space harmonic representation, an observer using feedback motor velocity has been proposed to obtain more accurate speed regulation [7,8,10]. In the research, from the point of view of disturbance rejection, there exists a plant input disturbance equivalent to the cogging torque. Especially, it can be combined with the preinstalled PI controller, which guarantees the stability of the closed-loop system but is not appropriate for the rejection of the cogging disturbance. However, the observer requires a redesign of the gain when the motor velocity changes because the system matrix of the observer includes the feedback motor speed. Therefore, it is a disadvantage to apply to the actual systems in which the rotation speed varies.
In this paper, unlike the observer in [10], we propose a control method with a state observer independent of the motor velocity. For this, several coordinate transformations for observable canonical form are used in order to make the motor speed an observer input. Then, we show that the gain of the proposed state observer is independent of the feedback motor speed. Simulation and experimental results for an actual brushless DC motor verify the effectiveness of the proposed method more than the previous study of [10].
The remainder of this paper is as follows. In Section 2, we present the problem statement. Section 3 provides an observer design method and stability analysis. Then, in Section 4, the proposed control method is evaluated in terms of an actual permanent magnet motor. Finally, conclusions are laid out Section 5.
2. Problem Statement
We consider a very common dynamic model of permanent magnet motors as follows:
where is the rotor angular speed, is the inertia, is the friction coefficient, is the cogging torque disturbance, is the torque constant, and is the armature current. It is assumed that the motor angular velocity is measurable, while the disturbance is not. Here, the cogging torque can generally be expressed as follows:
where and are the unknown magnitude and phase of the n-th torque harmonic, respectively, and n is any positive number. We also introduce the error signal to be regulated to zero as follows:
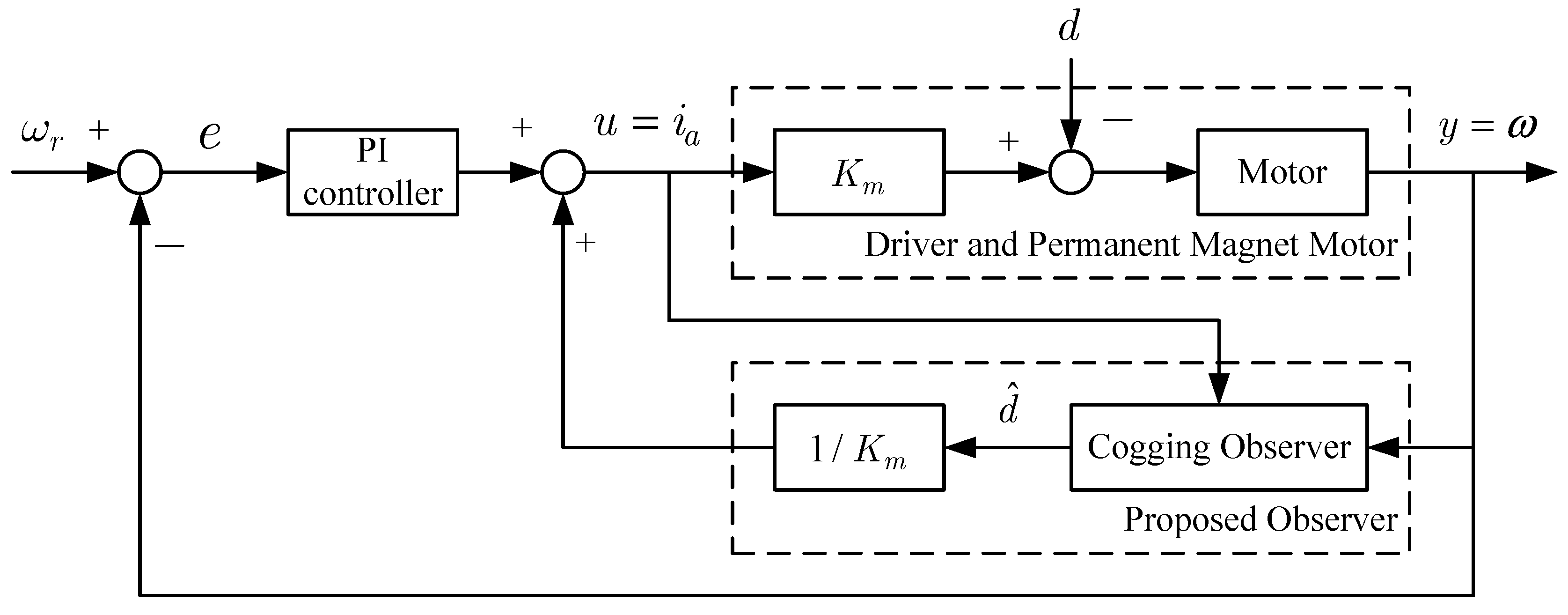
where is the reference motor velocity, and it is assumed to be any constant. The configuration of the control system is shown in Figure 1. Here, we suppose that there exists a PI controller that serves as the constant reference regulation of when the cogging disturbance d is zero.
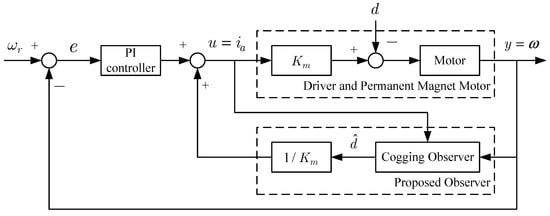
Figure 1.
System configuration.
3. Observer Design and Analysis
Defining , , and , we have the state-space model of (1) as follows:
In order to concisely describe the cogging torque , we suppose that there is a generator of the vector , written as
where
in which, , the initial condition are unknown, but is nonzero for . Then, the cogging torque can be written as
where is an unknown matrix and the pair is observable.
Let where are selected such that
and let
Then, using the state transformation , the systems (4) and (5) are transformed into an observable canonical form
where
Then, the system (3) and (6) can be represented as follows:
where y is the measurable motor angular velocity.
Now, let
where are the coefficients of the characteristic polynomial of A given by
Then, by the similarity transformation , into its observable canonical form written as
where
in which, and , , are given by
For the system (7), we propose an observer as follows:
where is the estimate of and the observer gain is chosen such that is Hurwitz.
Now, let define the estimate of d, and then we can easily show the following main result of this paper.
In order to prove it, let us define . We have
which is exponentially stable because the matrix is Hurwitz. Then, we obtain
where is the estimate of . Here, it follows from the structure of that the matrix T is nonsingular since A and B are nonzero. Therefore, the proof is complete.
4. Simulation and Experimental Results
In order to validate the performance of the proposed observer in Section 3, it is tested for a permanent magnet motor system. For this, a model of an 80 W brushless DC motor (manufactured by Shinano Kenshi Co., Ltd., Nagano, Japan) was used in the simulation and experiment, and thus the system parameters of (1) are given by Table 1.

Table 1.
System parameters.
To serve as the regulation of the constant reference , the PI controller of Figure 1 is designed as follows:
where and with . Here, is a design parameter that determines the performance of the PI controller.
4.1. Simulation Results
The simulations were performed in Matlab/Simulink with ODE45, and the maximum step size was s. For the proposed observer, the harmonic of the cogging torque was assumed as 2 (i.e., in (4)) and the observer gain of (8) was selected as . Additionally, the initial observer states were zero. Therefore, the proposed observer is implemented by
where u and y are viewed as inputs.
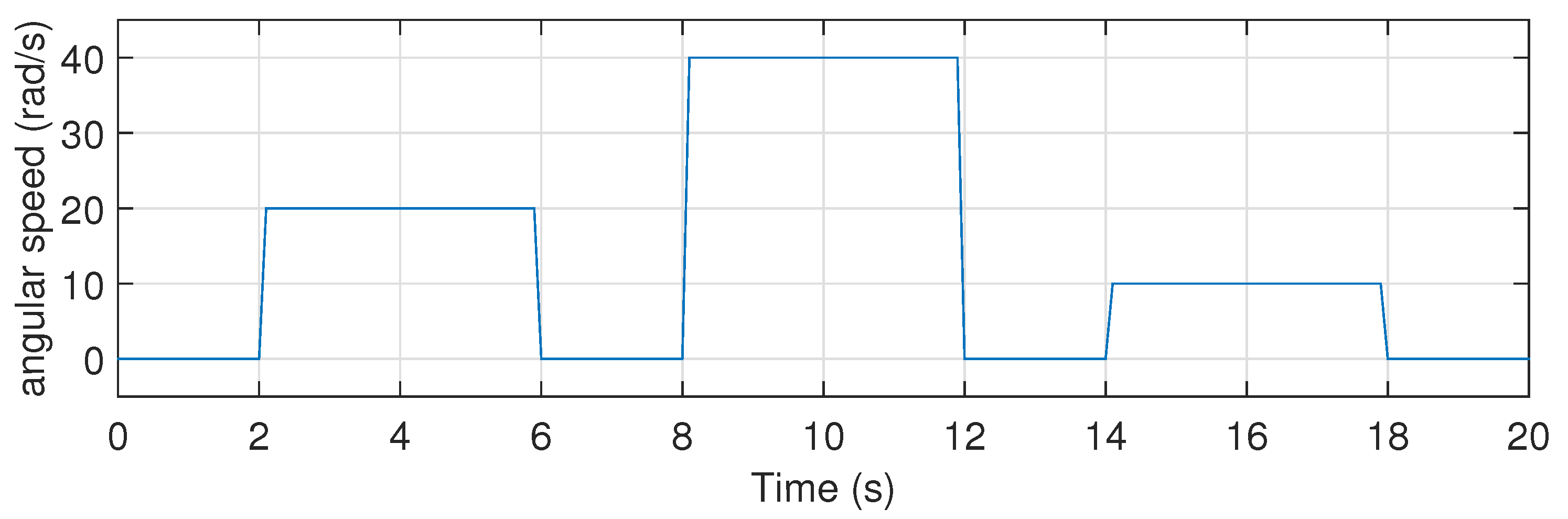
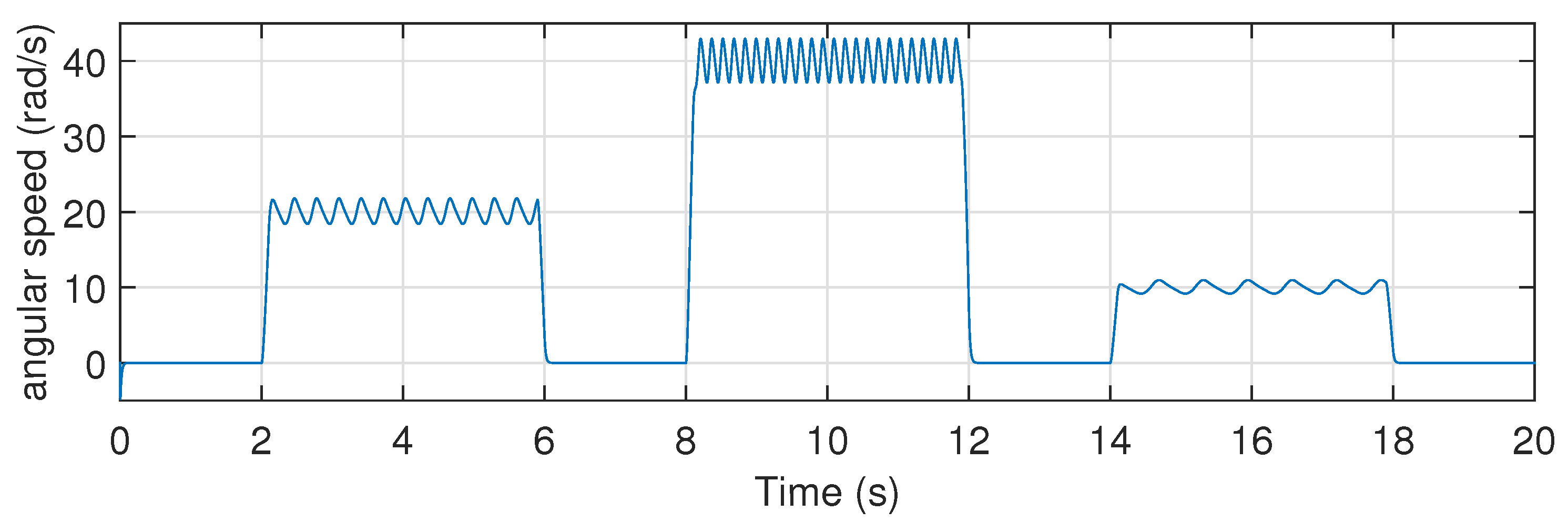
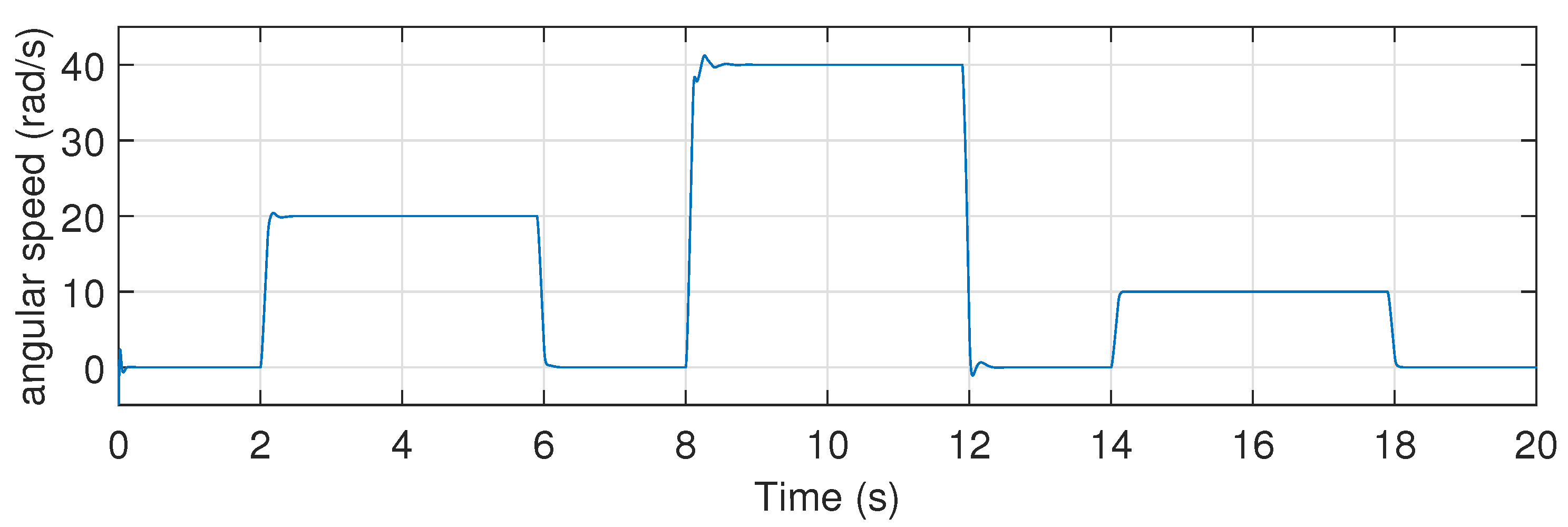
Figure 2 shows the reference speed profile for the simulations and experiments (to be seen shortly) of this paper, in which the profile has a trapezoidal shape at three different speeds: 20, 40, and 10 rad/s. Additionally, the acceleration and deceleration times were selected as 100 ms at the respective speeds. As shown in Figure 3, we first introduce the result of applying only PI controller without the proposed observer. Although the motor angular speed tracks the reference , its performance is still far from perfect regulation because of the cogging torque disturbance d. On the other hand, our method shows that the motor angular speed converges to the reference after a few transients, as shown in Figure 4.
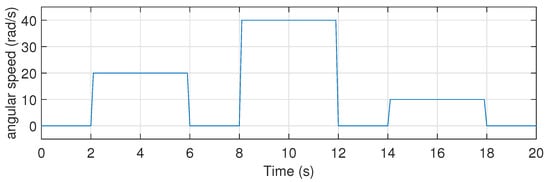
Figure 2.
Reference signal .
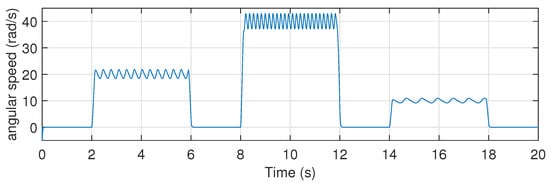
Figure 3.
Simulation result: motor angular speed under the PI controller.
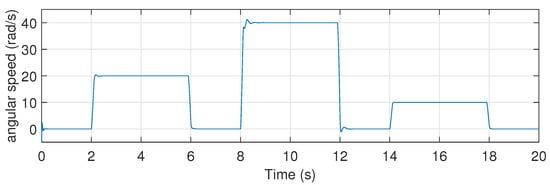
Figure 4.
Simulation result: motor angular speed under the PI controller and proposed observer.
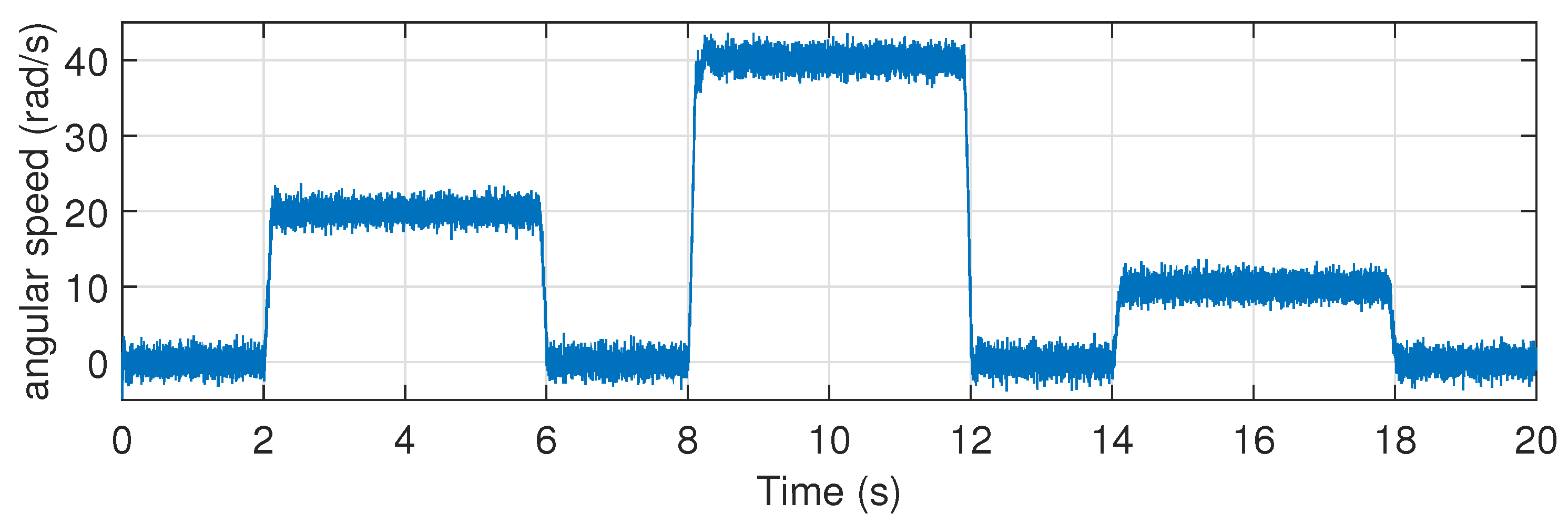
In addition, as shown in Figure 5, a simulation with measurement noise is carried out in order to reflect the real situation. The measured signals y and u are disturbed by Gaussian noise whose the variance is . Although the motor speed randomly oscillates around the reference trajectory due to the measurement noises, we can see effective tracking performance.

Figure 5.
Simulation result: motor angular speed under measurement noise.
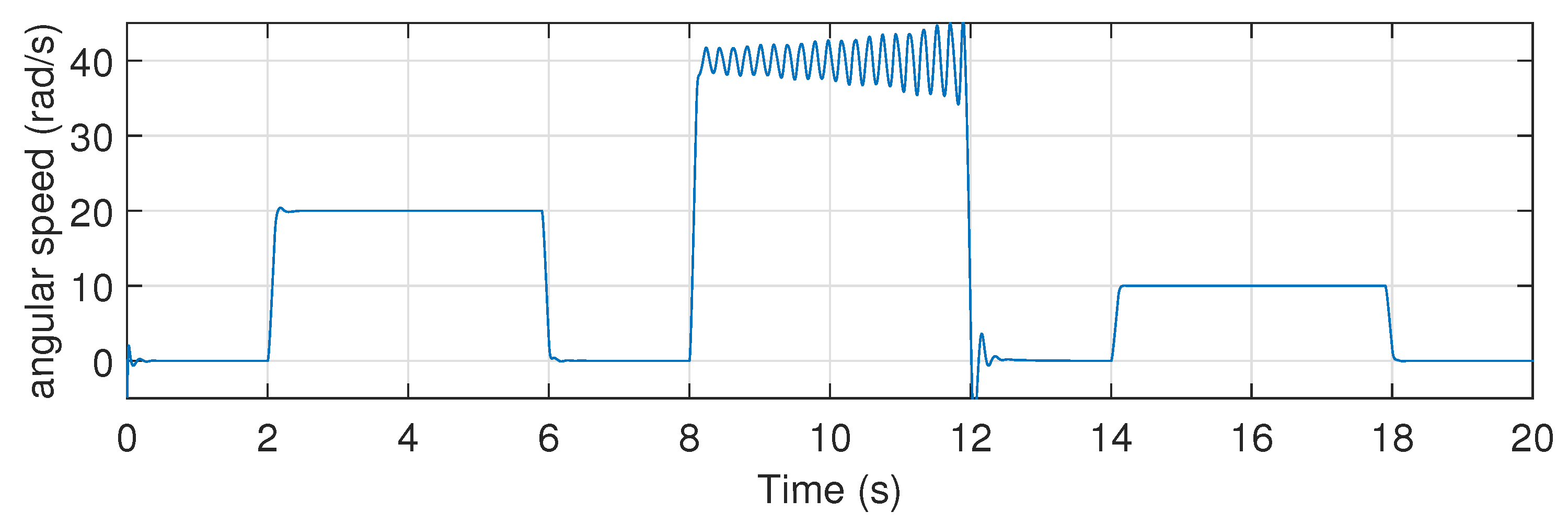
Finally, we perform a simulation to compare the proposed observer with the conventional observer in [10] as depicted in Figure 6. While the motor speed tends to the reference trajectory all target speed 20, 40, and 10 rad/s, it is shown that with the conventional observer, the output speed effectively tracks the target speeds 20 and 10 rad/s, but not for 40 rad/s.
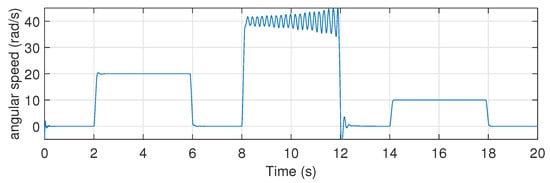
Figure 6.
Simulation result: motor angular speed under the conventional observer in [10].
The reason is that the stability of the observer in [10] depends on the motor angular speed, and thus the designed conventional observer of this paper is unstable at 40 rad/s. To solve the problem, a particular observer gain can be designed. Nevertheless, the gain does not guarantee stability at all motor angular speeds. On the other hand, our observer gain does not depend on the motor angular speed as shown in (8).
4.2. Experimental Results
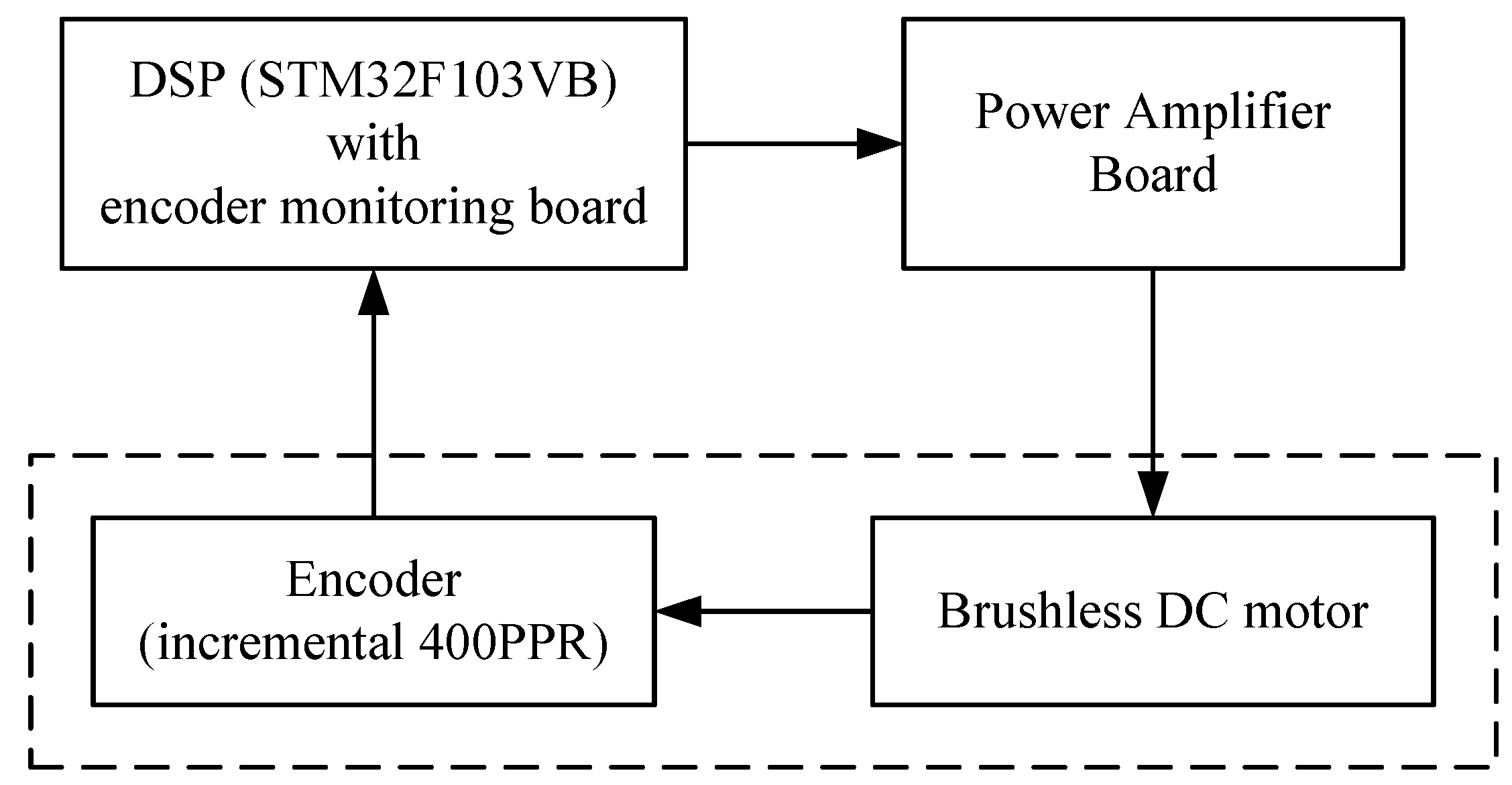
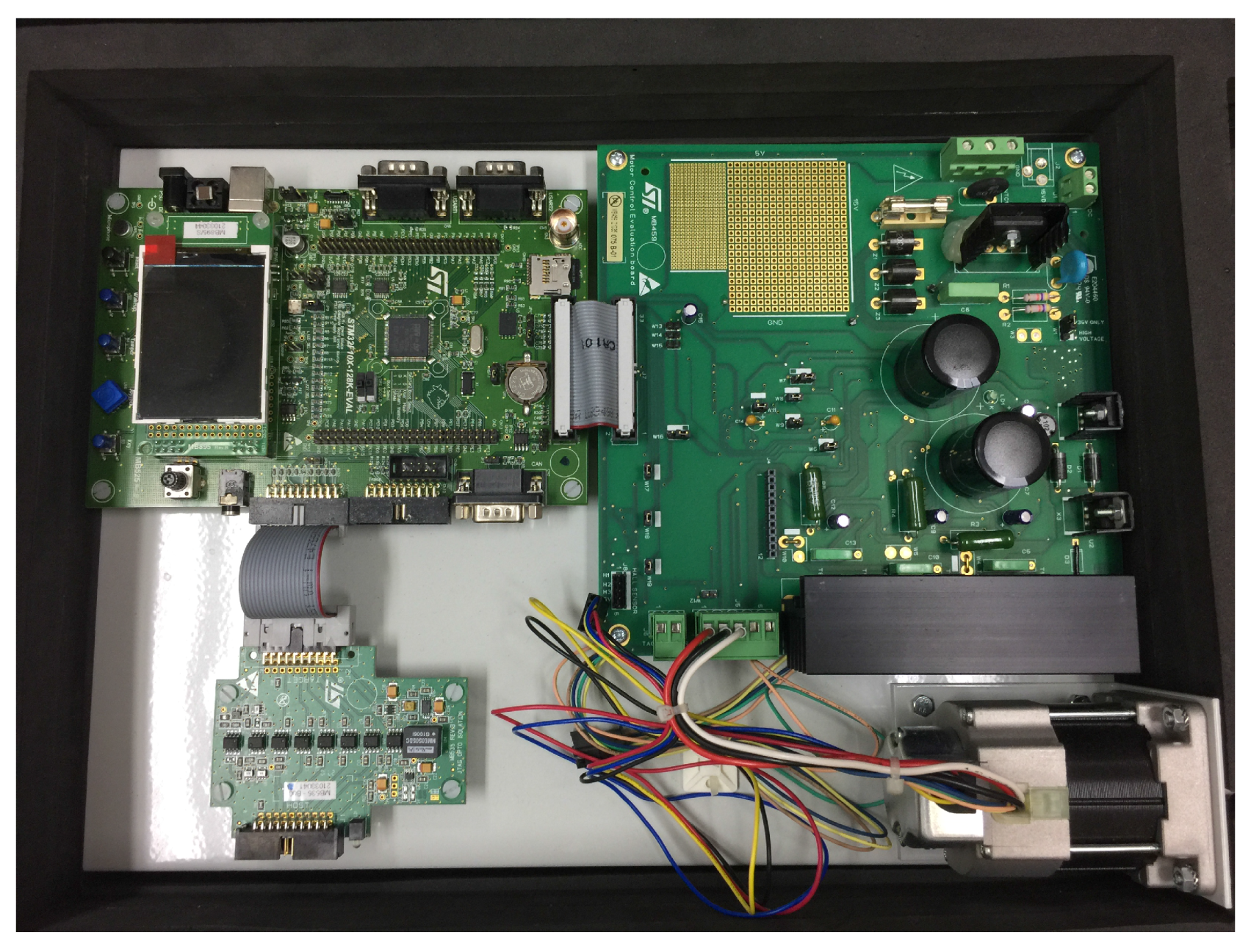
The proposed method is implemented using a DSP (STM32F103VB manufactured by STMicroelectronics) and the motor of Table 1 with an incremental encoder of 400 PPR (pulse/rotation), which is depicted in Figure 7. The experimental parameters are given in Table 2, and a picture of the actual experiment setup is shown in Figure 8. We perform two experiments where the PI controller with and without the proposed observer is applied as in the computer simulation of Figure 3 and Figure 4. As shown in Figure 9, the experimental results with the PI controller show that the effect of the cogging disturbance is not completely eliminated as in the simulation result. On the other hand, the experimental results using the proposed observer show the convergence of motor angular speed toward the reference speed, which is depicted in Figure 10. The motor angular speed is not perfectly converged, which might result from the undesirable measurement noise.
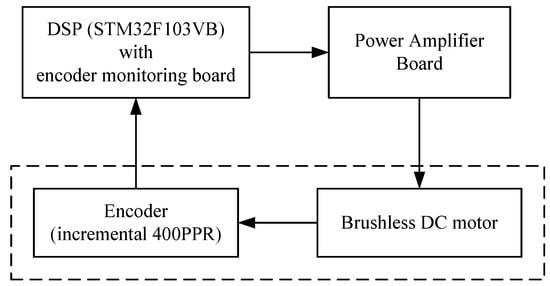
Figure 7.
Experiment configuration. PPR: pulse per rotation.
Table 2.
Experimental parameters.
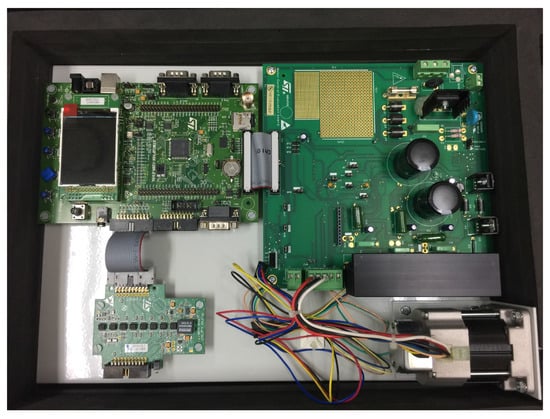
Figure 8.
Experiment setup.
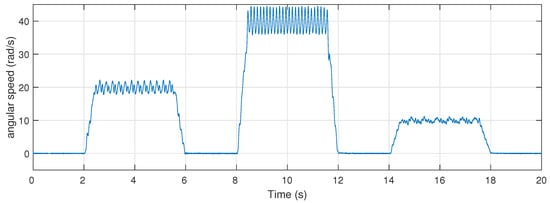
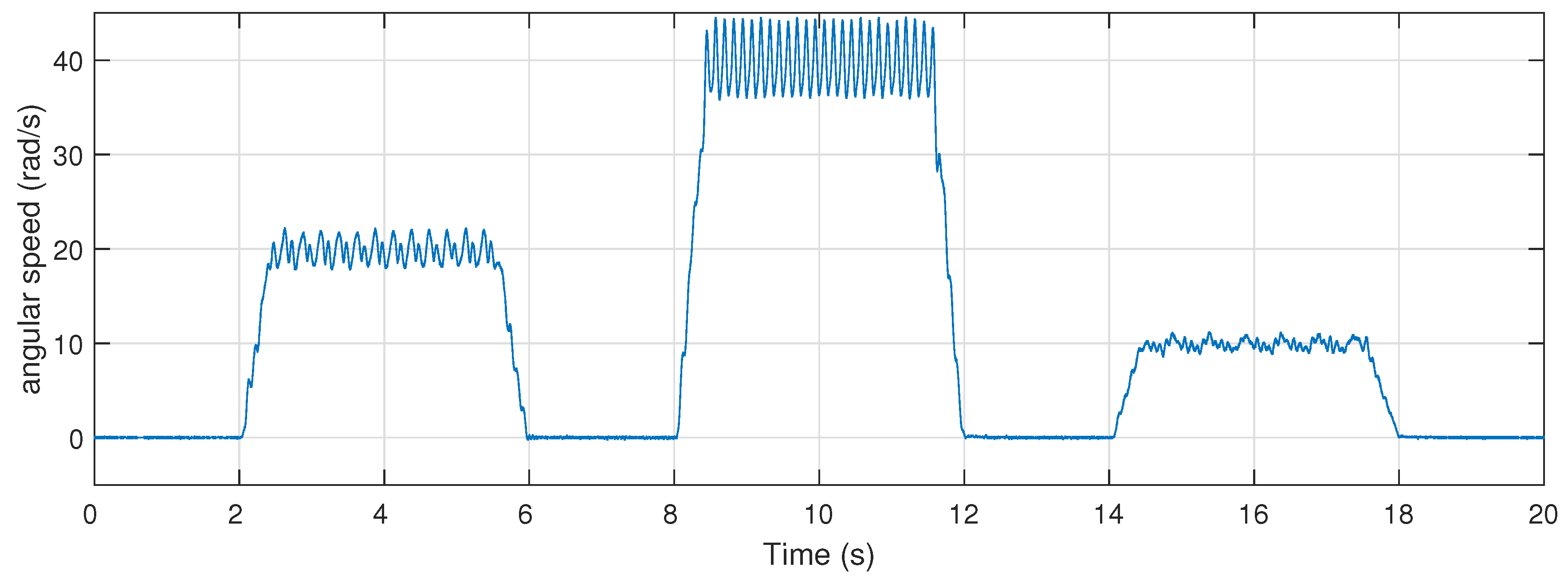
Figure 9.
Experimental result: motor angular speed under the PI controller.
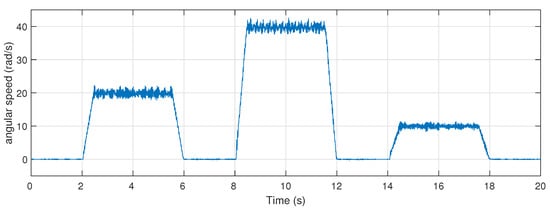
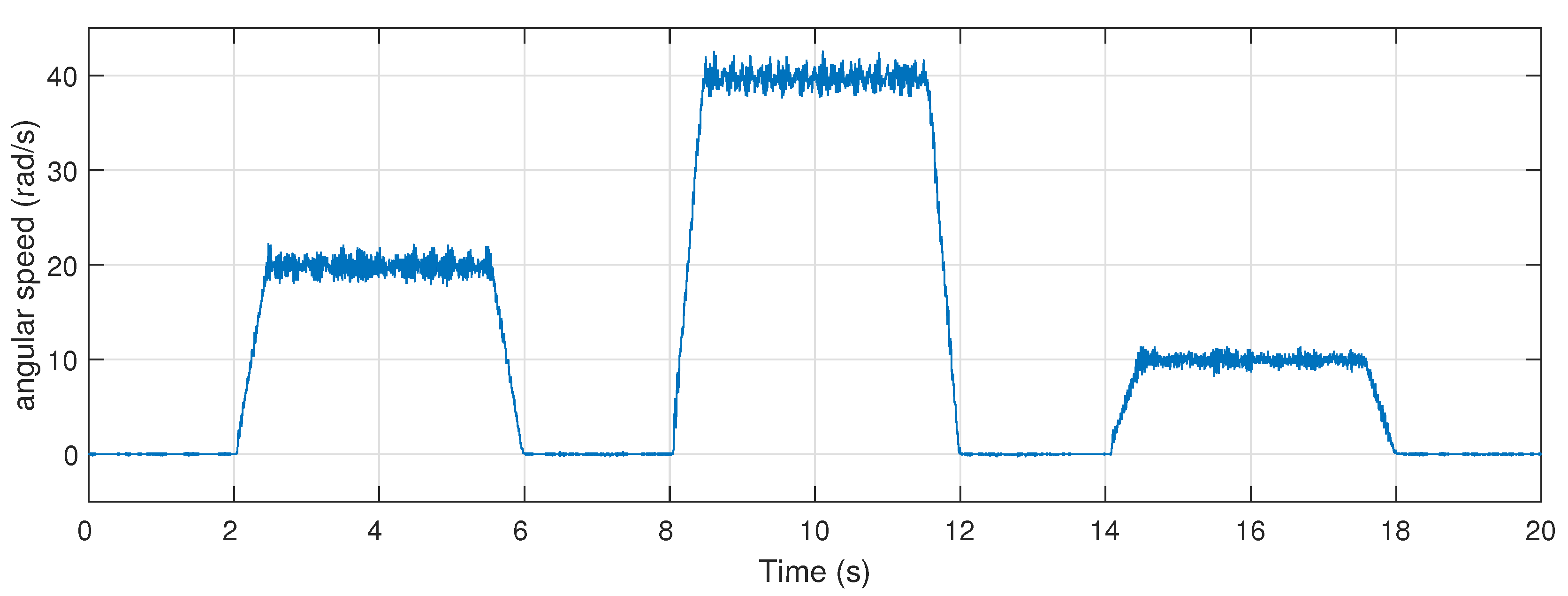
Figure 10.
Experimental result: motor angular speed under the PI controller and proposed observer.
Remark 1.
In fact, the motor used in the experiment has a rated speed higher than 40 rad/s, as shown in Table 1. Nevertheless, as shown in Figure 9 and Figure 10, the motor speed applied to the experiment in this paper is 10, 20, and 40 rad/s because the cogging effect degrades the servo performance of permanent magnet motor seriously in the low speed range. Note that regardless of the motor speed, of (10) tend to zero because of (9) does as well. ⋄
5. Conclusions
We have presented a control method to prove the velocity regulation for permanent magnet motor systems, through the compensation of the disturbance generated by the cogging torque. It is assumed that the cogging is represented by the harmonics of sinusoids. Under this assumption, we have proposed a state observer with an internal model expressing the cogging disturbance. Especially, unlike conventional approaches, we have shown that the gain of the proposed state observer is independent of the motor rotation velocity. Finally, the proposed method is applied to the real brushless DC motor, and its effectiveness is confirmed via simulations and experiments.
Acknowledgments
We would like to acknowledge the financial support from the R&D Convergence Program of NST (National Research Council of Science & Technology) of Republic of Korea.
Author Contributions
Kyung-Tae Nam and Hyungjong Kim proposed the detection idea and wrote the manuscript. Seung-Joon Lee and Tae-Young Kuc performed the experiments and edited the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Sul, S.K. Control of Electric Machine Drive Systems; IEEE Press: Piscataway, NJ, USA, 2011. [Google Scholar]
- Li, T.; Slemon, G. Reduction of cogging torque in permanent magnet motors. IEEE Trans. Magn. 1988, 24, 2901–2903. [Google Scholar]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted PM motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Minimization of cogging force in a novel line a permanent-magnet motor for artificial hearts. IEEE Trans. Magn. 2013, 49, 3901–3904. [Google Scholar]
- Studer, C.; Keyhani, T.; Sebastian, T.; Murthy, S. K. Study of cogging torque in permanent magnet machines. In Proceedings of the IEEE IAS Annual Meeting, New Orleans, LA, USA, 5–9 October 1997; pp. 42–49. [Google Scholar]
- Zhu, Z. Q. Influence of design parameters on cogging torque in permanent magnet machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef]
- Ruderman, M.; Ruderman, A.; Bertram, T. Observer-based compensation of additive periodic torque disturbance in permanent magnet motors. IEEE Trans. Ind. Electron. 2013, 9, 1130–1138. [Google Scholar] [CrossRef]
- Chu, H.; Gao, B.; Chen, H. Low speed control for permanent magnet dc torque motor using observer-based nonlinear triple-step controller. IEEE Trans. Ind. Electron. 2016, 64, 3286–3296. [Google Scholar] [CrossRef]
- Wu, W. Disturbance compensation using feedforward and feedback for scanner direct current motor mechanism low speed regulation. J. Dyn. Syst. Meas. Control 2015, 137. [Google Scholar] [CrossRef]
- Wu, W. A cogging torque compensating disturbance estimator for dc motor speed regulation: Design and experimentation. In Proceedings of the IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 368–372. [Google Scholar]
- Wu, W. Disturbance compensation for DC motor mechanism low speed regulation: A feedforward and feedback implementation. In Proceedings of the IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 1614–1619. [Google Scholar]
- Wu, W. DC motor drive speed regulation: Using a repetitive control application in a flatbed scanner. IEEE Ind. Appl. Mag. 2012, 18, 38–46. [Google Scholar] [CrossRef]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).