From Point Clouds to Building Information Models: 3D Semi-Automatic Reconstruction of Indoors of Existing Buildings




Featured Application
Abstract
1. Introduction
2. Related Work
2.1. From Point Clouds to Building Information Model
2.2. Modelling of Building Geometry
2.2.1. Types of Models
2.2.2. Modelling of Indoor Environments
2.3. Object Recognition and Relationship Establishment
3. Full Description of the Approach
3.1. Project Framework
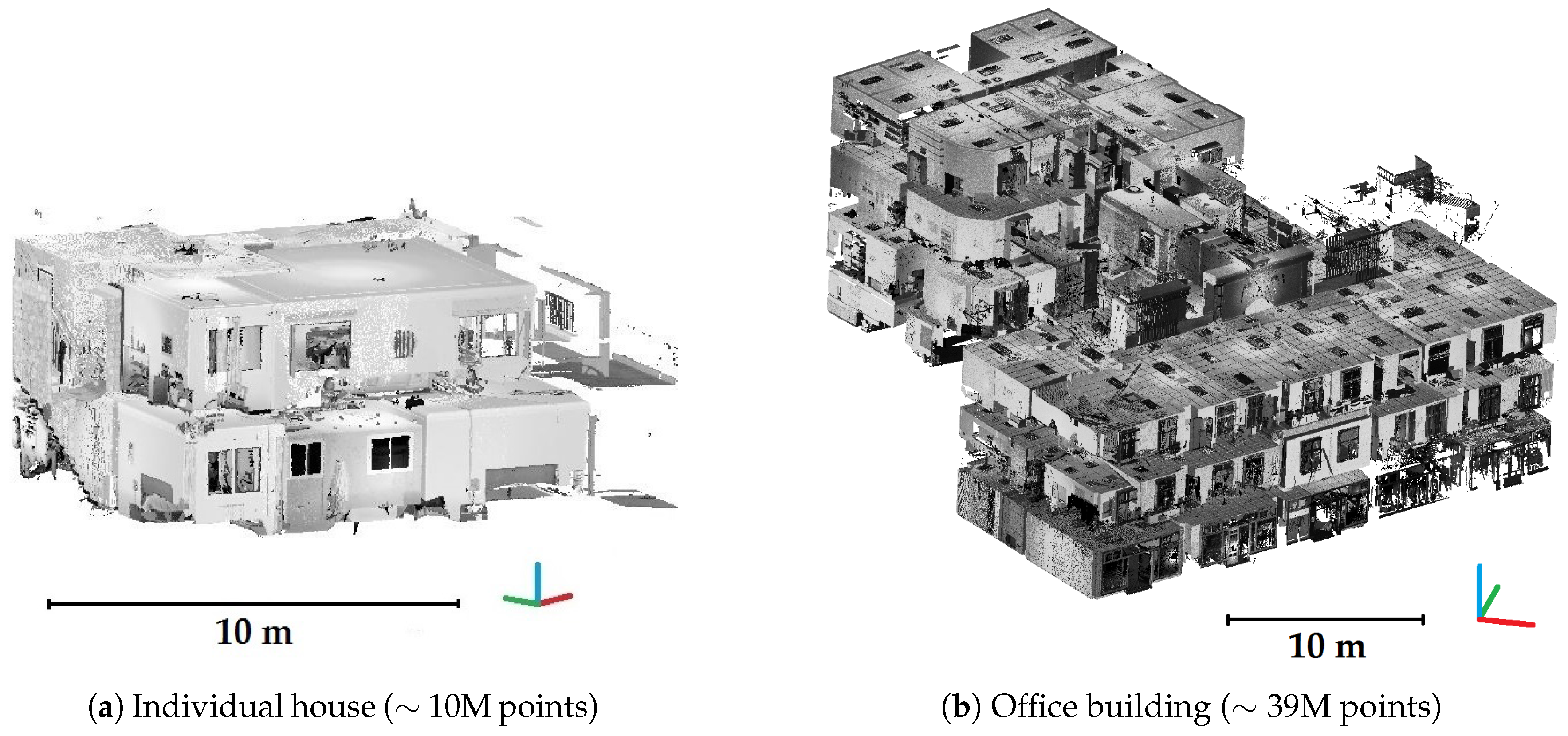
3.1.1. Buildings under Study
3.1.2. Input Data
- Scan stations:
- –
- optimize the placement of scan stations in order to acquire the whole environment without causing redundant data by multiplying scan stations
- –
- plan a consequent overlapping between point clouds in case of indirect georeferencing
- –
- if possible perform loops to improve the quality of the registration of point clouds (global adjustment) and to limit the risks of deviation
- Targets:
- –
- use at least 4 targets in common between two scans: 3 targets are sufficient to register point clouds issued from 2 successive scans but it is recommended to take more than 3 and to compensate the whole network of targets at once
- –
- prioritize targets placed in more than 2 scans. It should be ensured that targets are well-distributed in the space, that is to say placed at various ranges from the scanner, not in the same plane or along one line and locared at different heights
- –
- the use of natural targets such as edges, planes and cylinders can reduce and simplify data collection process; indeed, it can be difficult and time consuming to place targets throughout all the building
- Point spacing:
- –
- consider upstream the desired point density according to project specifications
- –
- adapt point spacing depending on space configuration and the positioning of targets in relation to the laser scanner
- Georeferencing after registration:
- –
- georeferencing can be either direct when positions and orientations of the successive scanner stations are known within a geodetic network, or indirect when the georeferencing is performed after the registration
- –
- in case of indirect georeferencing, the coordinates of targets or characteristic points well distributed in the scene are measured and are used to compute the transformation from the local system to the global system
- –
- georeferencing can improve the quality of the registration notably for a linear project
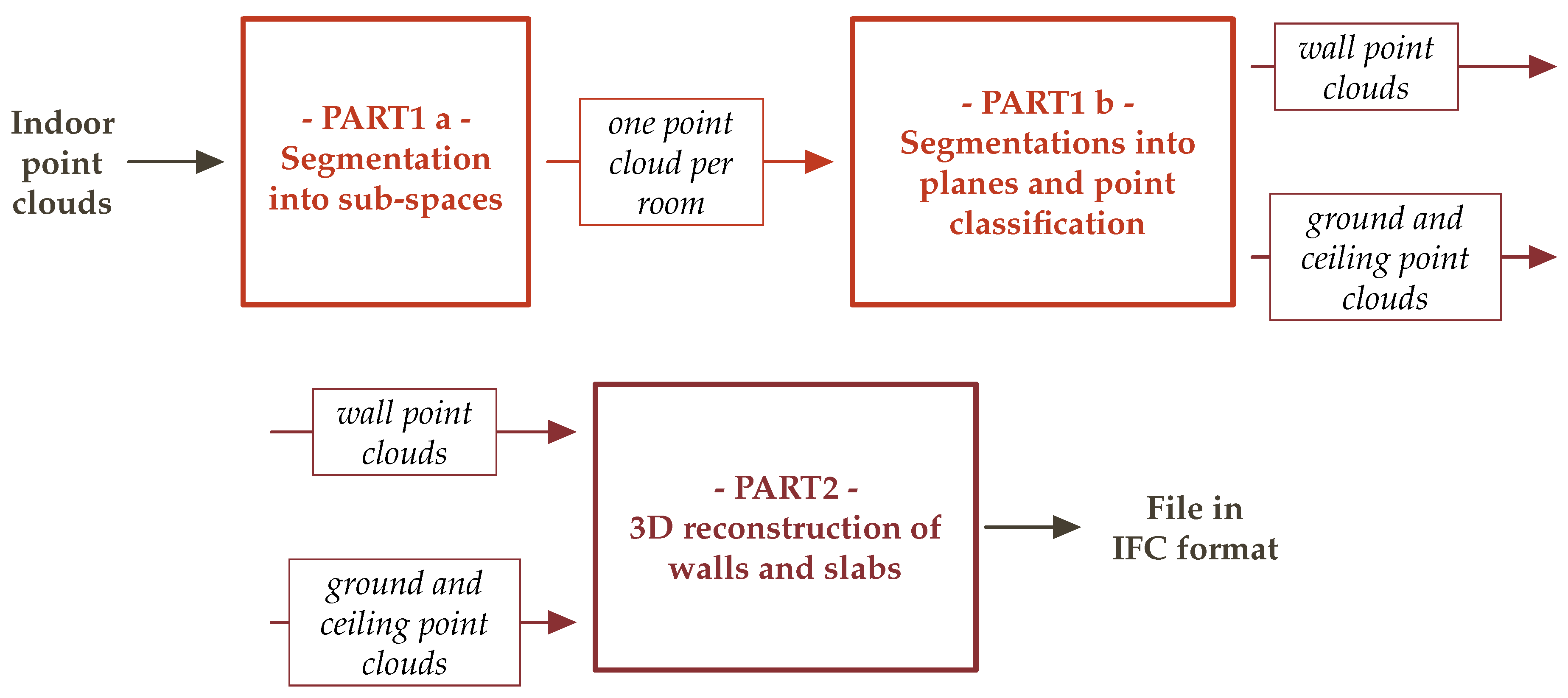
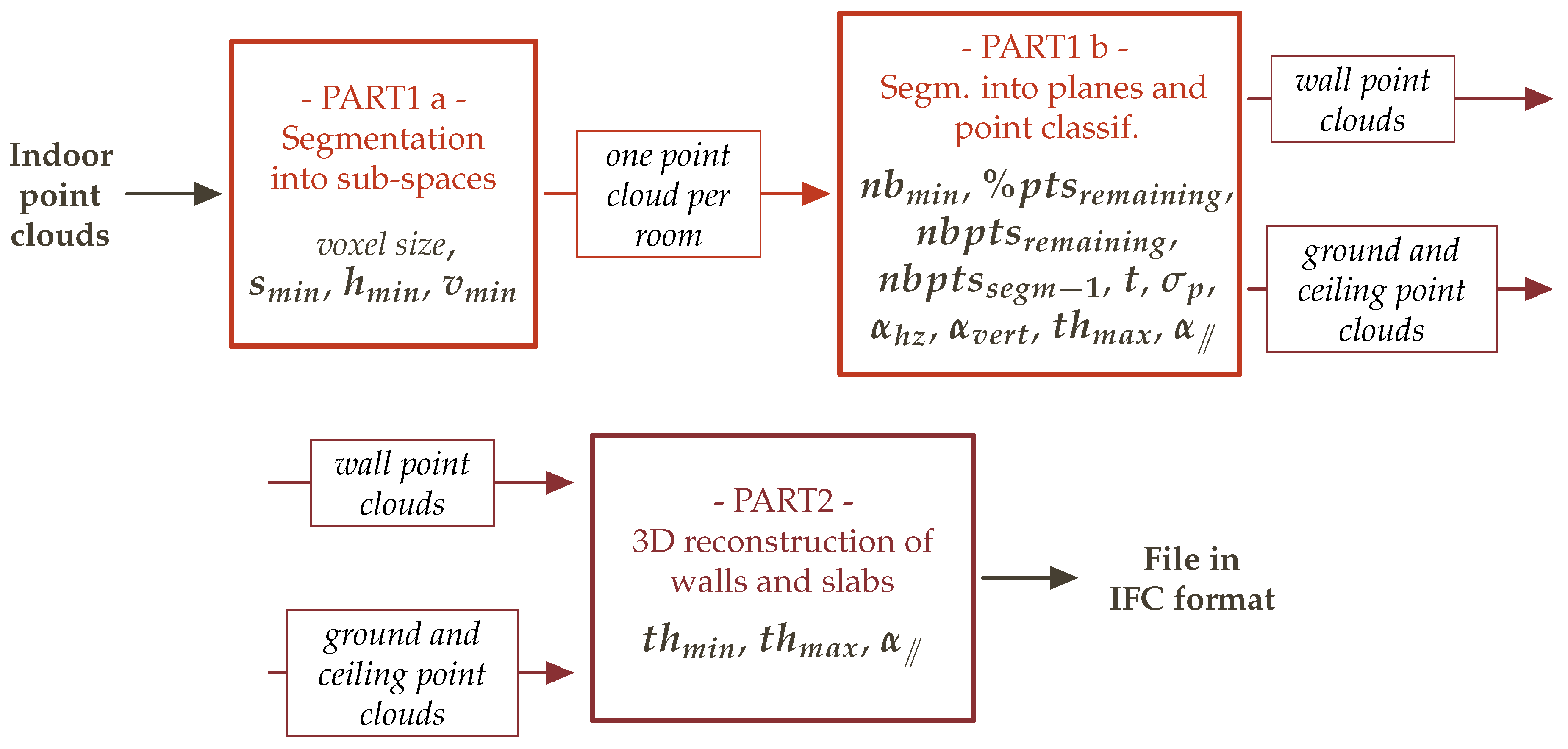
3.1.3. Overview of the Approach
3.2. Segmentation into Structural Elements
3.2.1. Segmentation into Sub-Spaces
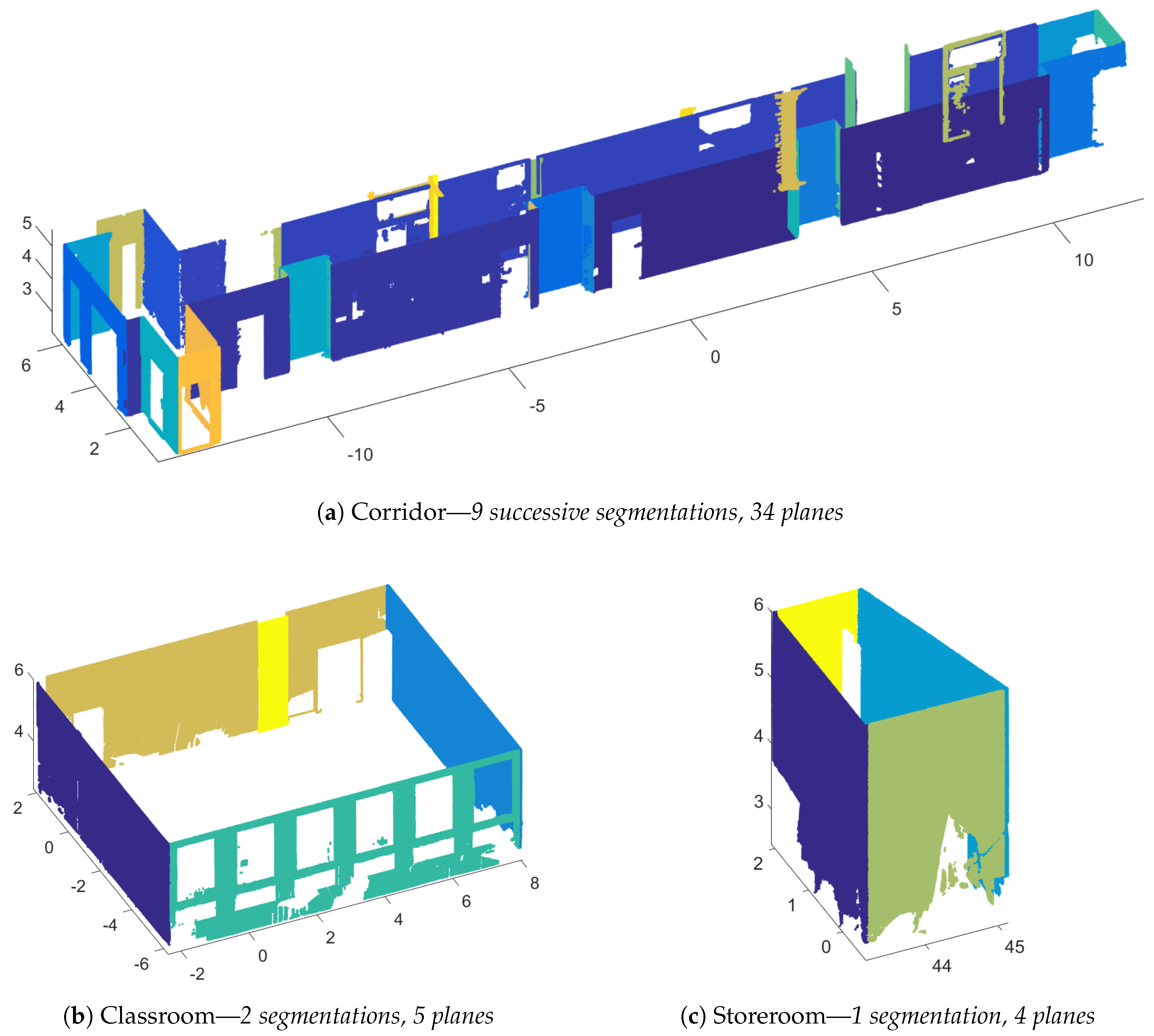
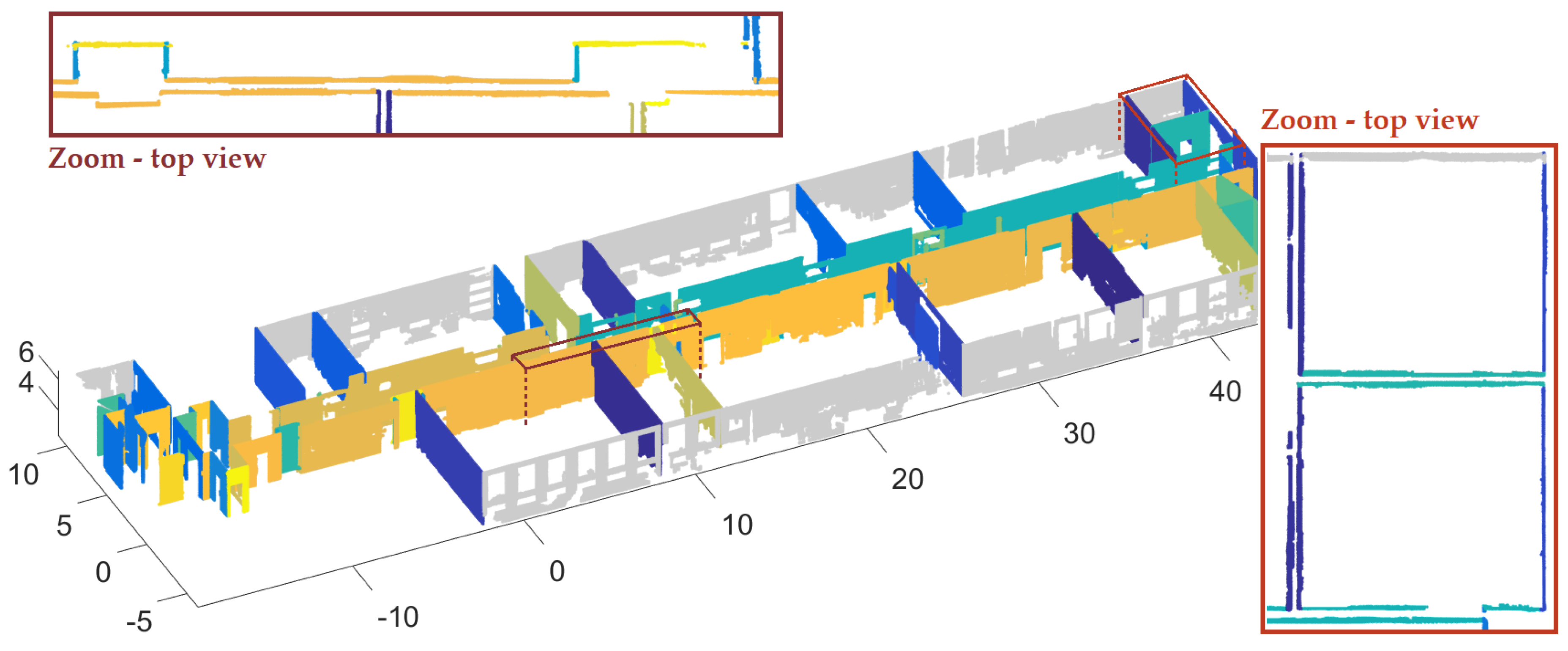
3.2.2. Segmentations into Planes and Point Classification
3.3. Reconstruction of Structural Elements
3.3.1. Element Description into Obj Format
- Wall composed of one plane: It can be encountered when only one side of a wall is determined or for elements such as pillars. In this case a line is adjusted to the plane point cloud projected in an horizontal plane. The wall portion is described by two points in the X-Y plane.
- Wall composed of two planes: If the two planes do not describe the two sides of a wall, the method of the case 1 is used. Otherwise, two lines are adjusted to the two plane point clouds projected in the horizontal plane. The wall axis is determined by the average of the two lines and the half-thickness is calculated by the average of distances between the points of both planes and the axis of the wall. Based on the axis and the thickness of the wall, four points are constructed to describe the wall in the X-Y plane.
- Wall composed of more than two planes: In this case, planes located in each side of the wall are grouped. If only one side is identified, the method of case 1 is used. If two sides are identified, the method proposed in case 2 is considered.
3.3.2. File Generation into IFC Format
4. Assessment of the Developed Approach
4.1. Datasets and Thresholds Used for the Assessment
4.1.1. Datasets for the Approach Assessment
4.1.2. Review of Involved Thresholds
- Thresholds related to spatial resampling of point clouds
- Thresholds related to space dimensions
- Thresholds related to constraints and quality criteria
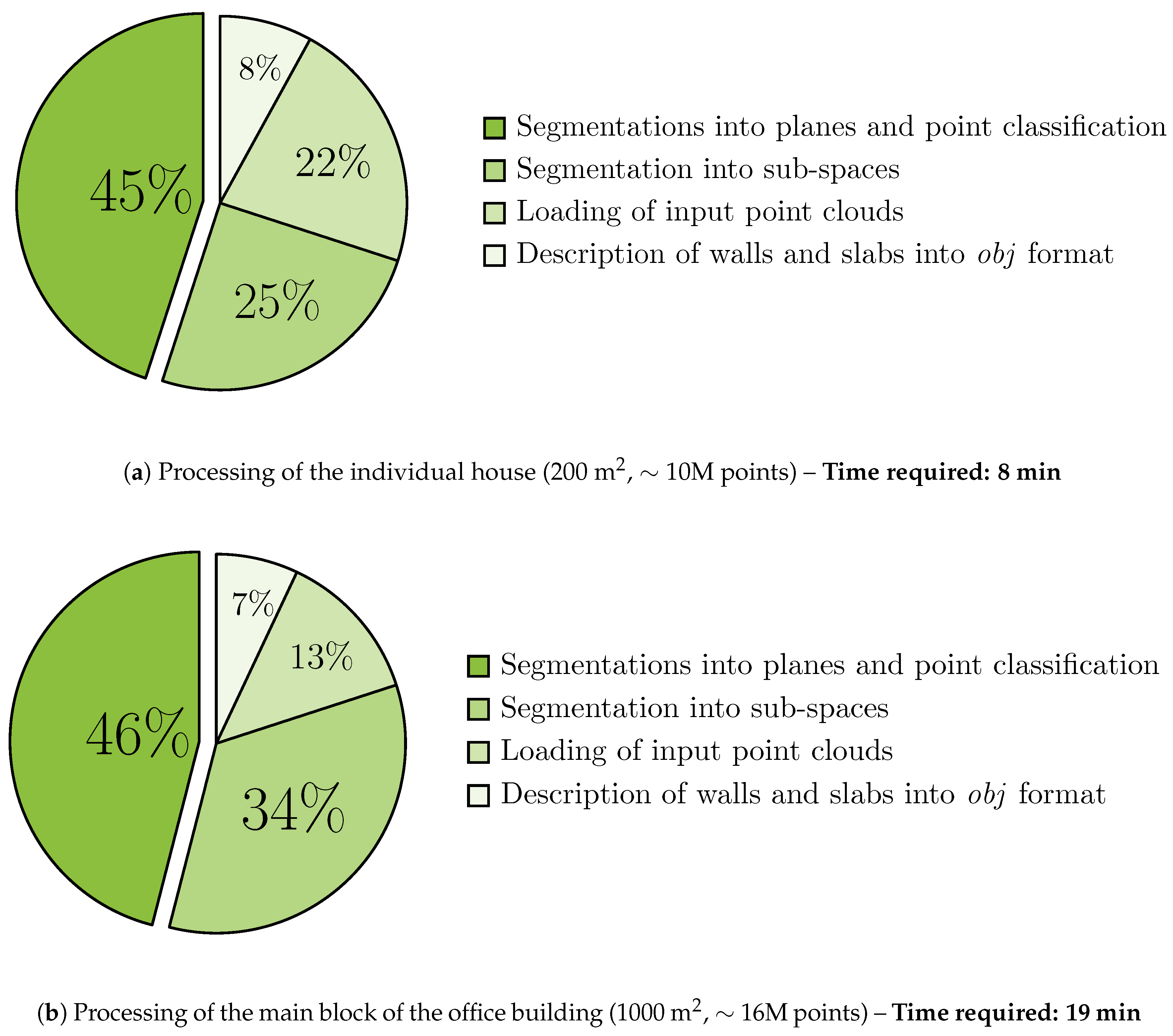
4.1.3. Processing of Datasets
4.2. Assessment of Segmentations and Point Classification
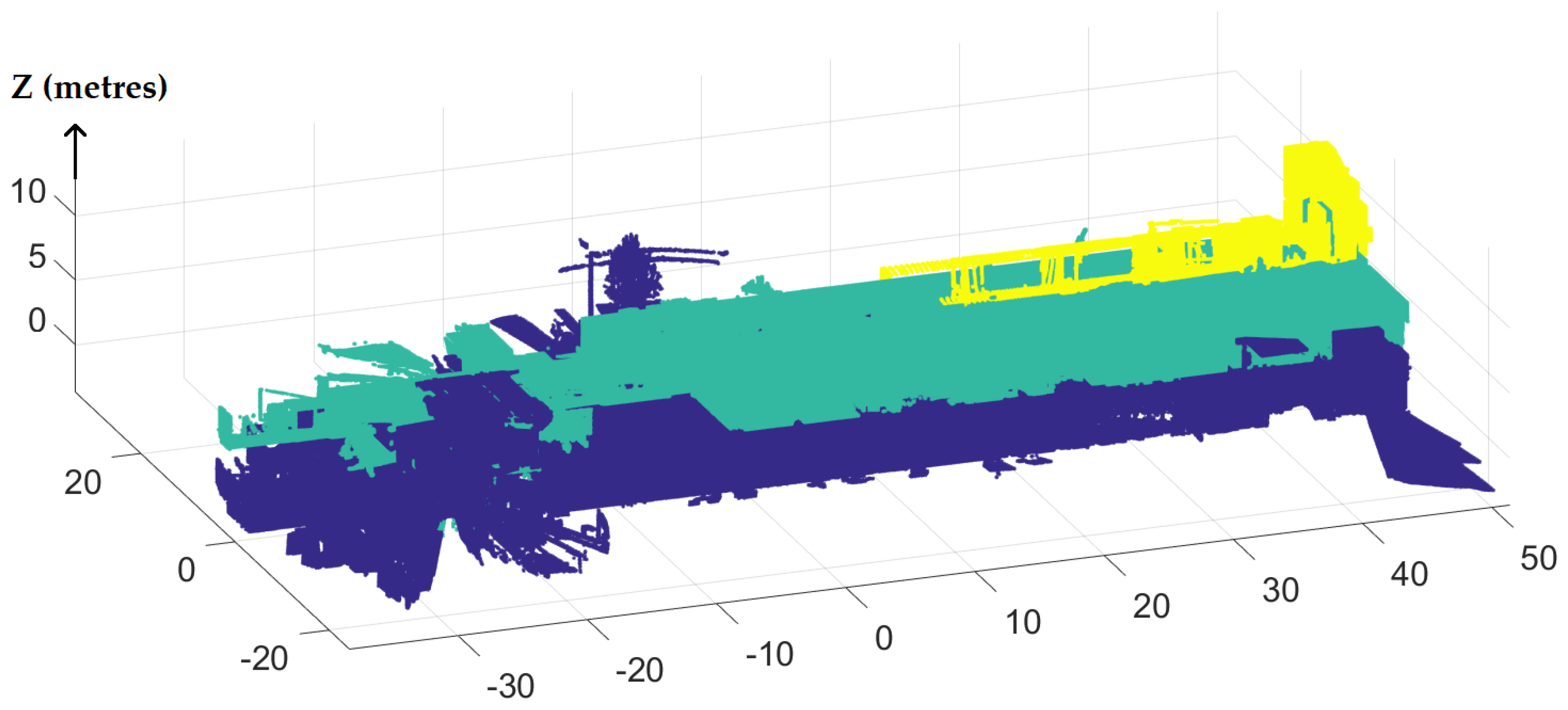
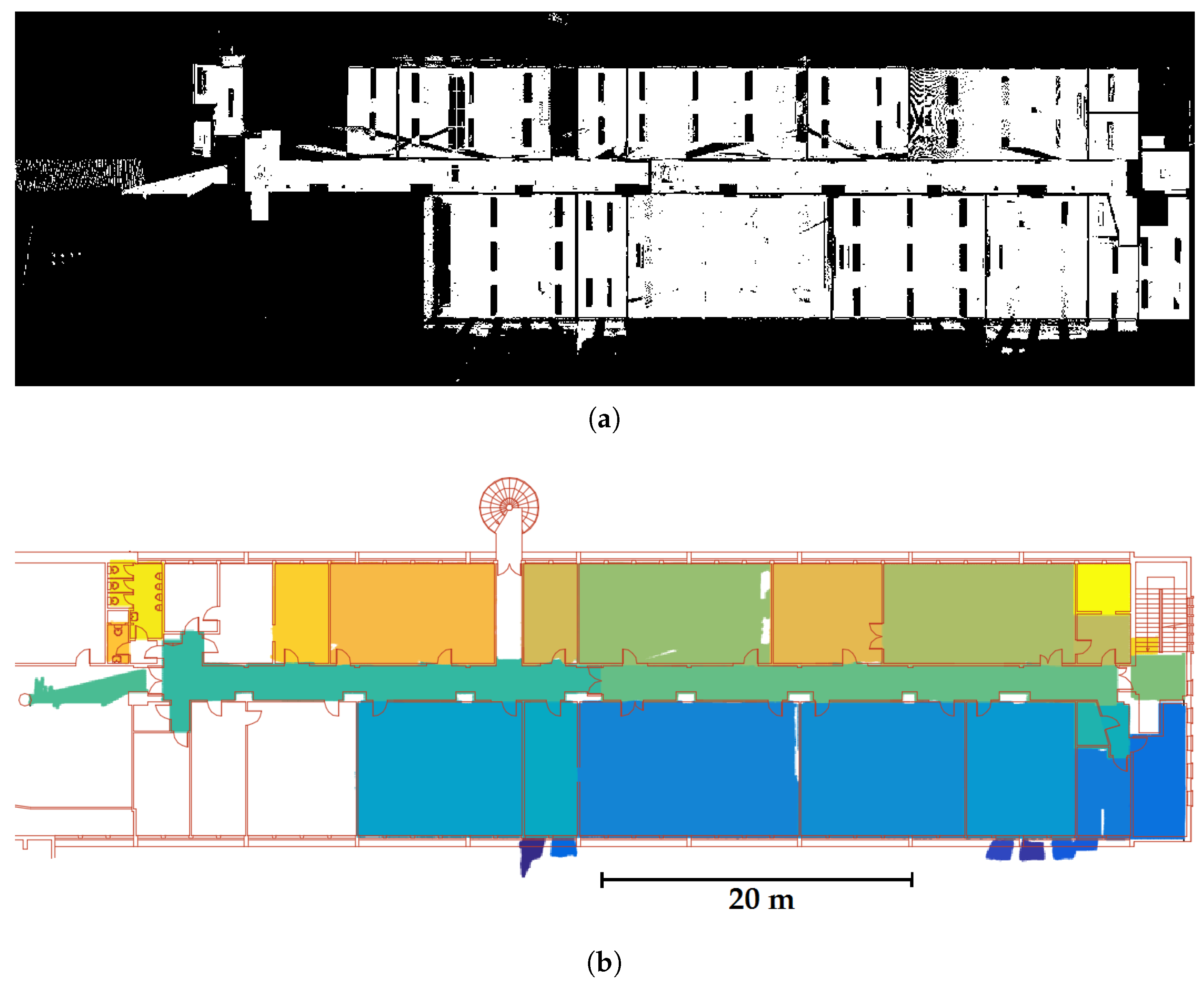
4.2.1. Segmentation into Sub-Spaces
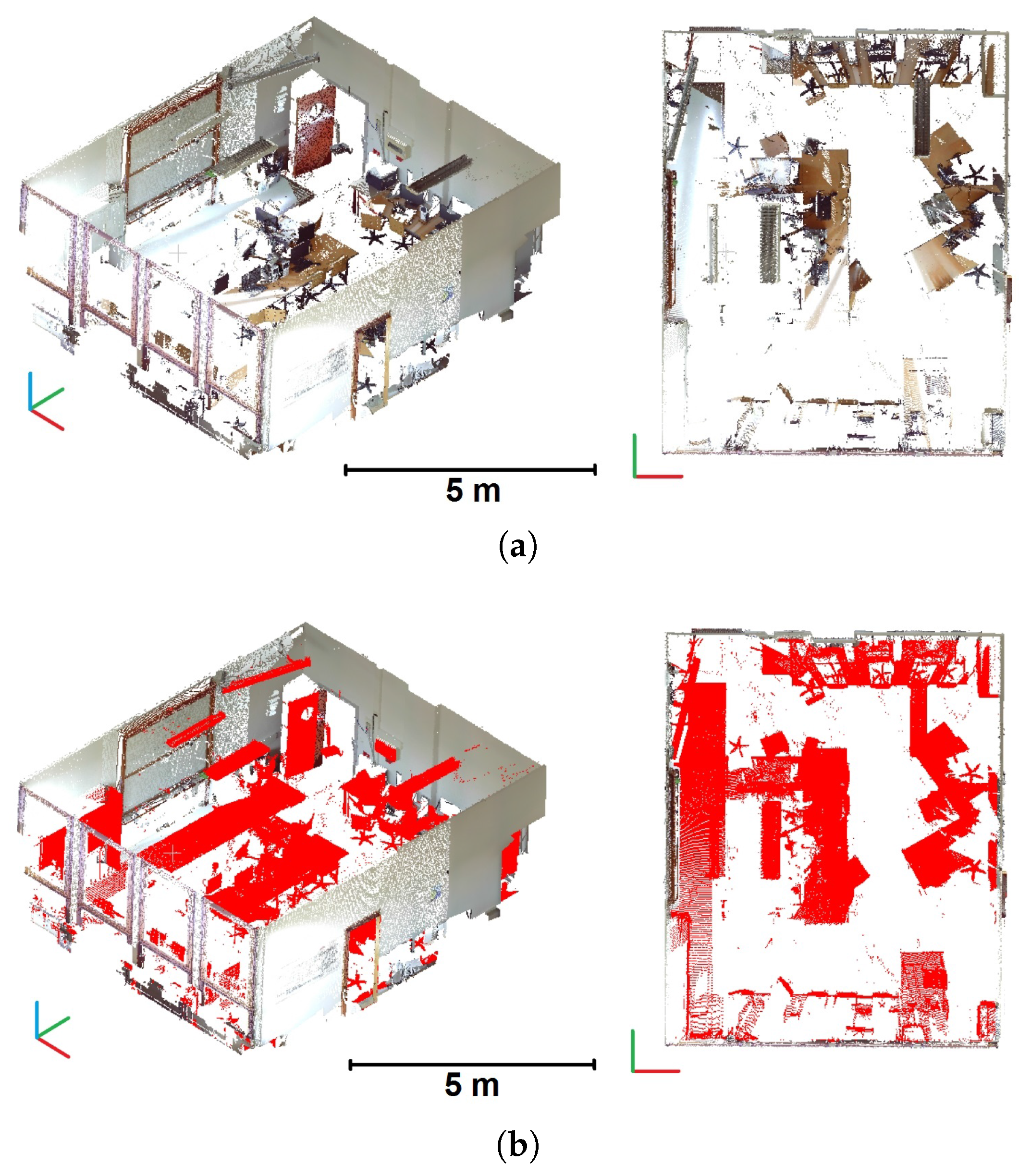
4.2.2. Classification of Points into Several Categories
4.2.3. Segmentation into Planes
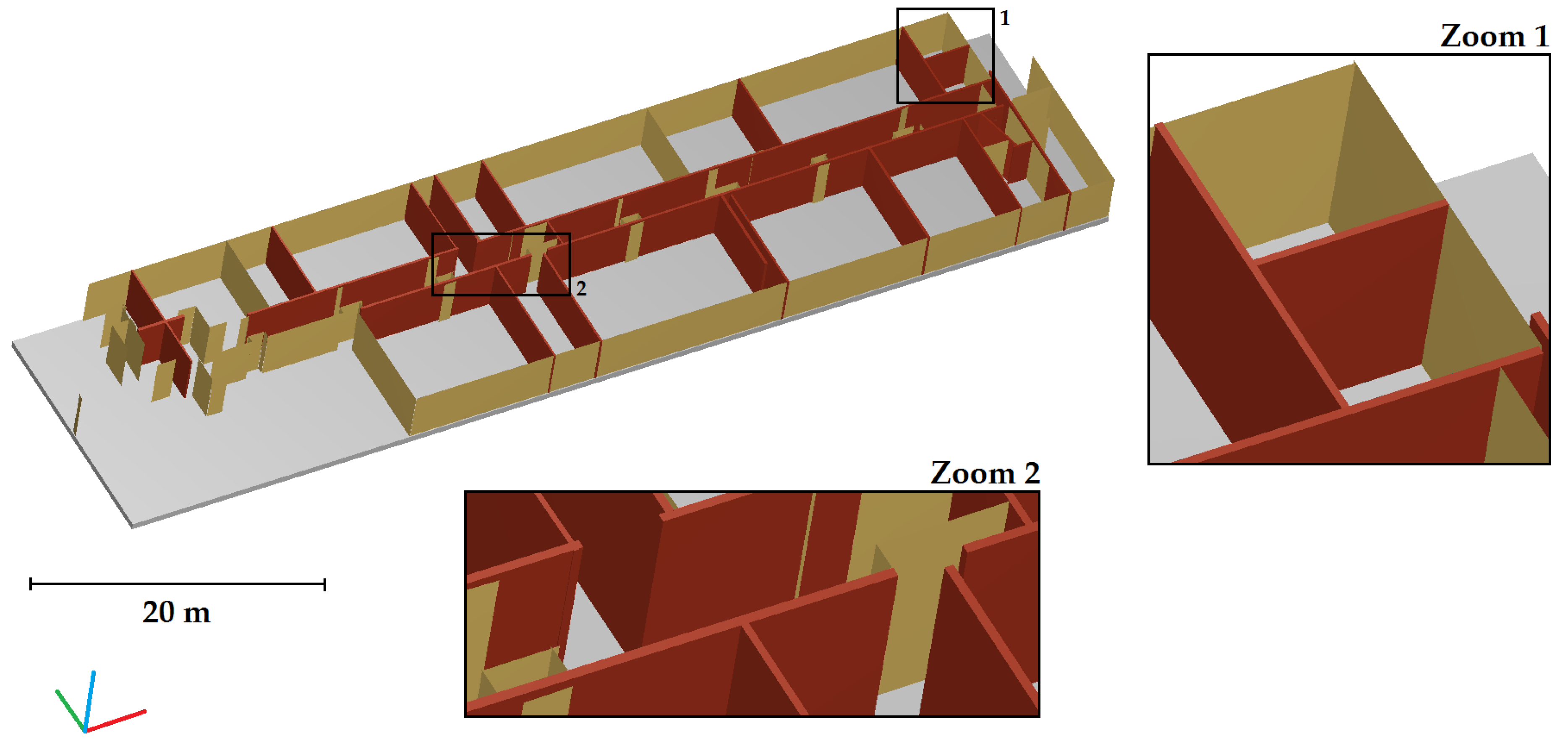
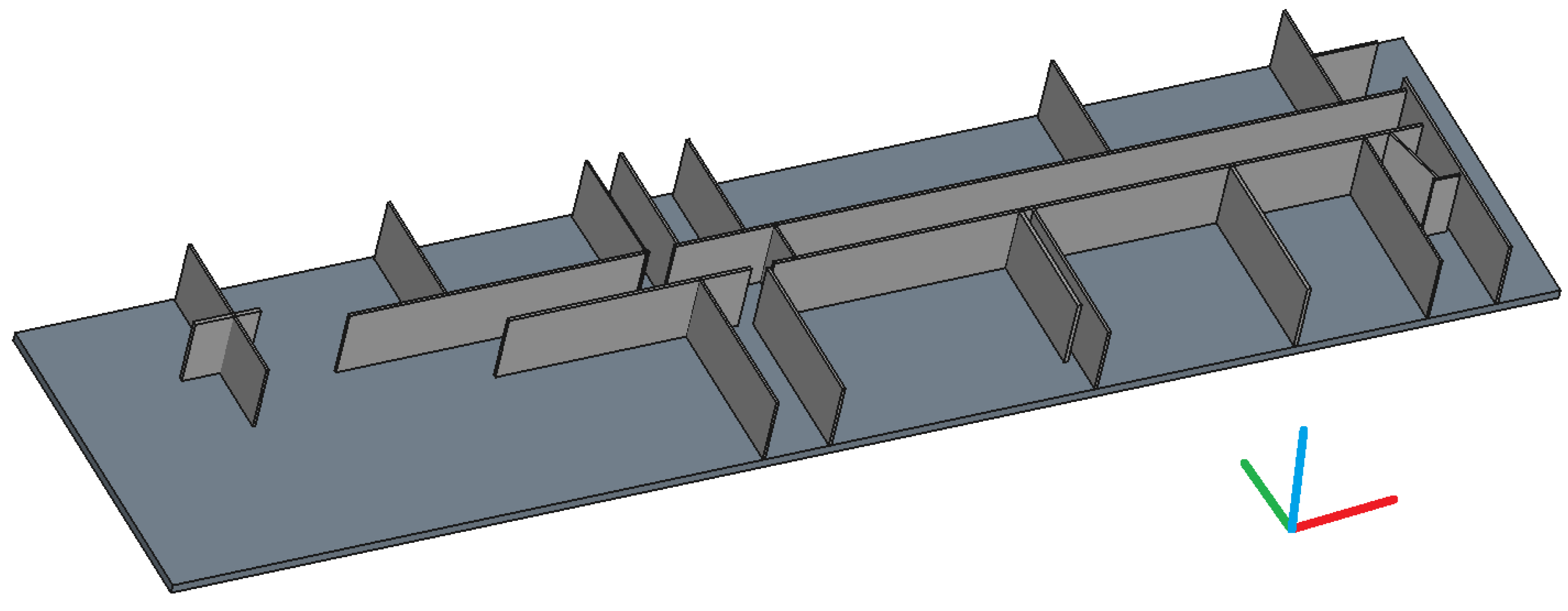
4.3. Assessment of Structural Element Reconstruction
4.3.1. Inspection of Reconstructed Walls
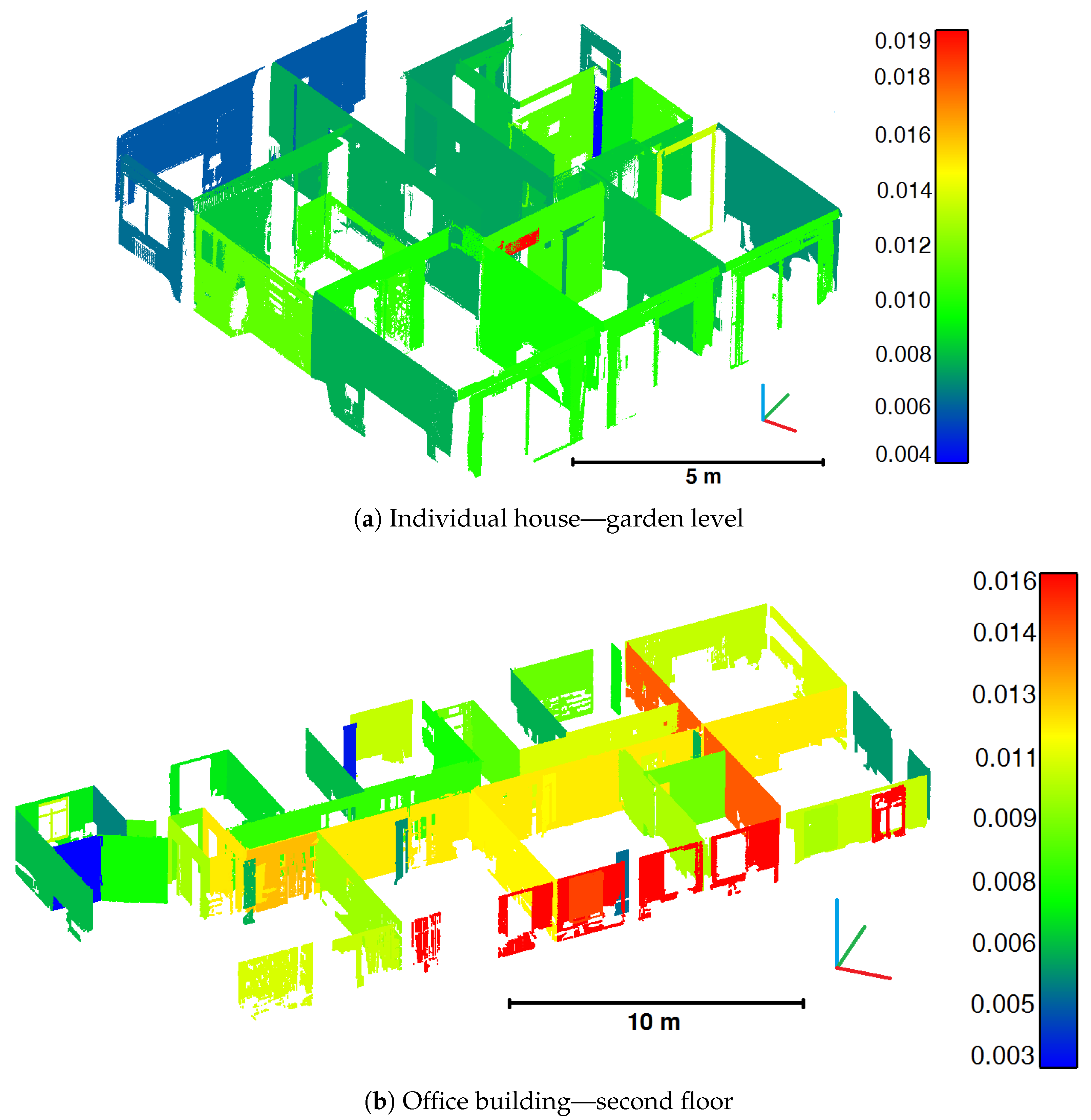
4.3.2. Attribution of Standard Deviations to Reconstructed Walls
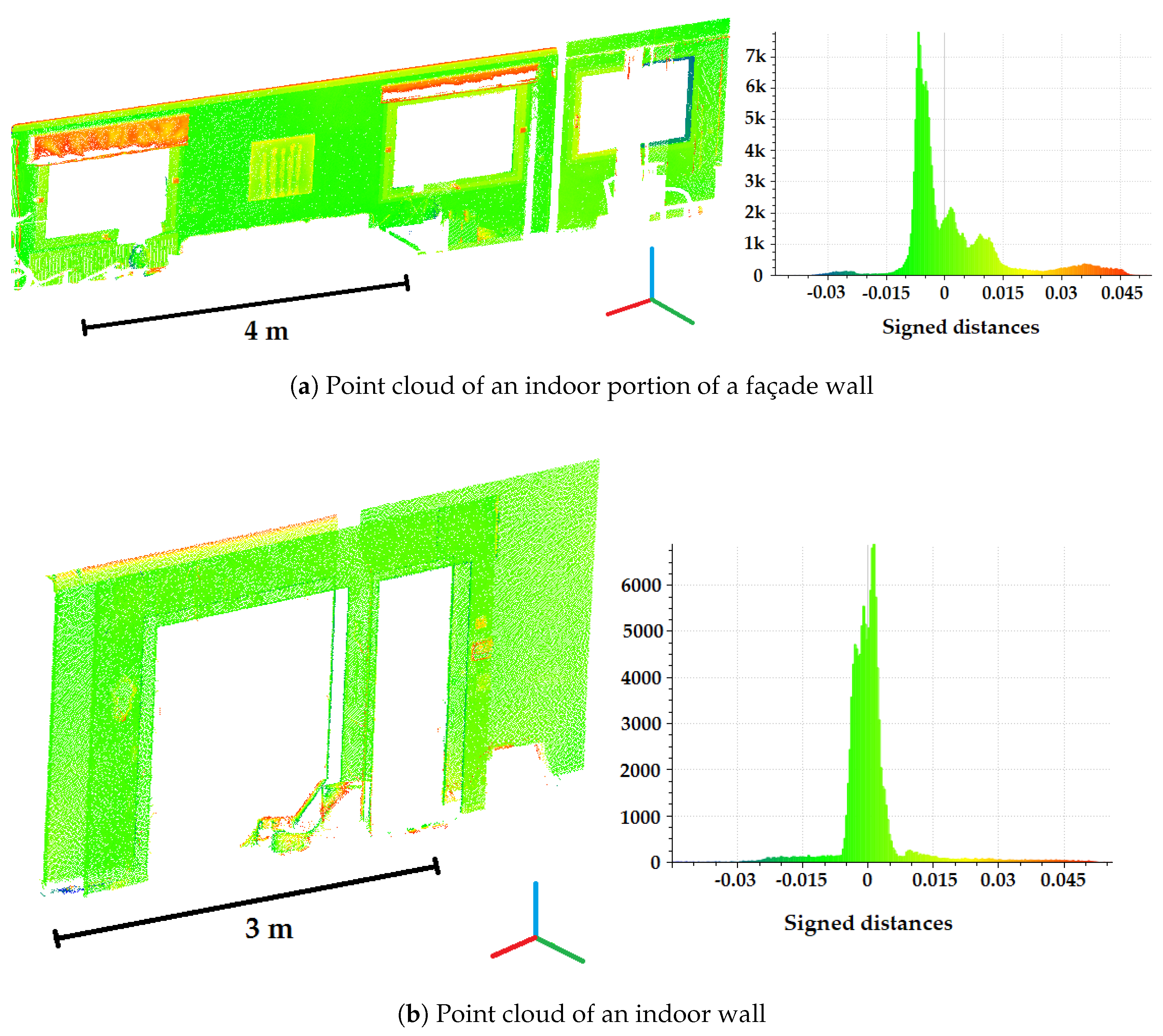
4.3.3. Analysis of Points-to-Model Distances
5. Future Work
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| BIM | Building Information Modelling |
| AEC | Architecture, Engineering and Construction |
| TLS | Terrestrial Laser Scanning |
| MEP | Mechanical, Electrical and Plumbing |
| RANSAC | RANdom SAmple Consensus |
| MW | Manhattan-World |
| PCA | Principal Component Analysis |
| MLESAC | Maximum Likelihood Estimation SAmple Consensus |
| RMSE | Root Mean Square Error |
| IFC | Industry Foundation Classes |
References
- Volk, R.; Stengel, J.; Schultmann, F. Building Information Modeling (BIM) for existing buildings—Literature review and future needs. Automat. Constr. 2014, 38, 109–127. [Google Scholar] [CrossRef]
- Del Giudice, M.; Osello, A. BIM for cultural heritage. In Proceedings of the XXIV International CIPA Symposium, Strasbourg, France, 2–6 September 2013; Volume XL-5/W2, pp. 225–229. [Google Scholar]
- Juan, Y.K.; Hsing, N.P. BIM-Based Approach to Simulate Building Adaptive Performance and Life Cycle Costs for an Open Building Design. Appl. Sci. 2017, 7, 837. [Google Scholar] [CrossRef]
- Azhar, S.; Khalfan, M.; Maqsood, T. Building information modelling (BIM): Now and beyond. Aust. J. Constr. Econ. Build. 2012, 12, 15–28. [Google Scholar] [CrossRef]
- Gao, T.; Akinci, B.; Ergan, S.; Garrett, J. Constructing as-is BIMs from progressive scan data. Gerontechnology 2012, 11, 75. [Google Scholar] [CrossRef]
- Li, S.; Isele, J.; Bretthauer, G. Proposed Methodology for Generation of Building Information Model with Laserscanning. Tsinghua Sci. Technol. 2008, 13, 138–144. [Google Scholar] [CrossRef]
- A Report for the Government Construction Client Group Building Information Modelling (BIM) Working Party Strategy Paper; Technical Report; BIM Industry Working Group: London, UK, 2011.
- Client Guide to 3D Scanning and Data Capture; Technical Report; BIM Task Group: London, UK, 2013.
- Tang, P.; Huber, D.; Akinci, B.; Lipman, R.; Lytle, A. Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Automat. Constr. 2010, 19, 829–843. [Google Scholar] [CrossRef]
- Anil, E.B.; Akinci, B.; Huber, D. Representation Requirements of As-Is Building Information Models Generated from Laser Scanned Point Cloud Data. In Proceedings of the 28th International Symposium on Automation and Robotics in Construction, Seoul, Korea, 29 June–2 July 2011; Volume 29, pp. 355–360. [Google Scholar]
- Käshammer, P.F.; Nüchter, A. Mirror identification and correction of 3D point clouds. In Proceedings of the 2015 3D Virtual Reconstruction and Visualization of Complex Architectures, Avila, Spain, 25–27 February 2015; Volume XL-5/W4, pp. 109–114. [Google Scholar]
- Voegtle, T.; Schwab, I.; Landes, T. Influences of different materials on the measurements of a terrestrial laser scanner (TLS). In Proceedings of the XXI ISPRS Congress, Beijing, China, 3–11 July 2008; Volume XXXVII, pp. 1061–1066. [Google Scholar]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Incidence Angle Influence on the Quality of Terrestrial Laser Scanning Points. In Proceedings of the ISPRS Workshop Laserscanning 2009, Paris, France, 1–2 September 2009; Volume XXXVIII, pp. 183–188. [Google Scholar]
- Adan, A.; Huber, D. 3D reconstruction of interior wall surfaces under occlusion and clutter. In Proceedings of the International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission, Hangzhou, China, 16–19 May 2011; pp. 275–281. [Google Scholar]
- Previtali, M.; Barazzetti, L.; Brumana, R.; Scaioni, M. Towards automatic indoor reconstruction of cluttered building rooms from point clouds. In Proceedings of the ISPRS Technical Commission V Symposium, Riva del Garda, Italy, 23–25 June 2014; Volume II-5, pp. 281–288. [Google Scholar]
- Pătrăucean, V.; Armeni, I.; Nahangi, M.; Yeung, J.; Brilakis, I.; Haas, C. State of research in automatic as-built modelling. Adv. Eng. Inform. 2015, 29, 162–171. [Google Scholar] [CrossRef]
- Larsen, K.E.; Lattke, F.; Ott, S.; Winter, S. Surveying and digital workflow in energy performance retrofit projects using prefabricated elements. Automat. Constr. 2011, 20, 999–1011. [Google Scholar] [CrossRef]
- Rajala, M.; Penttilä, H. Testing 3D Building Modelling Framework in Building Renovation. In Proceedings of the 24th eCAADe Conference, Volos, Greece, 6–9 September 2006; pp. 268–275. [Google Scholar]
- Xiong, X.; Adan, A.; Akinci, B.; Huber, D. Automatic creation of semantically rich 3D building models from laser scanner data. Automat. Constr. 2013, 31, 325–337. [Google Scholar] [CrossRef]
- Grussenmeyer, P.; Landes, T.; Doneus, M.; Lerma, J.L. Basics of range-based modelling techniques in Cultural Heritage. In 3D Recording, Documentation and Management in Cultural Heritage; Whittles Publishing: Caithness, UK, 2016; Chapter 6. [Google Scholar]
- Pu, S.; Vosselman, G. Knowledge based reconstruction of building models from terrestrial laser scanning data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 575–584. [Google Scholar] [CrossRef]
- Boulaassal, H.; Landes, T.; Grussenmeyer, P. Automatic extraction of planar clusters and their contours on building façades recorded by terrestrial laser scanner. Int. J. Archit. Comput. 2009, 7, 1–20. [Google Scholar] [CrossRef]
- Schnabel, R. Efficient Point-Cloud Processing with Primitive Shapes. Ph.D. Thesis, University of Bonn, Bonn, Germany, 2009. [Google Scholar]
- Grussenmeyer, P.; Alby, E.; Landes, T.; Koehl, M.; Guillemin, S.; Hullo, J.F.; Assali, P.; Smigiel, E. Recording approach of heritage sites based on merging point clouds from high resolution photogrammetry and Terrestrial Laser Scanning. In Proceedings of the XXII ISPRS Congress, Melbourne, Australia, 25 August–1 September 2012; Volume XXXIX-B5, pp. 553–558. [Google Scholar]
- Landes, T.; Kuhnle, G.; Bruna, R. 3D modeling of the Strasbourg’s cathedral basements for interdisciplinary research and virtual visits. In Proceedings of the 25th International CIPA Symposium 2015, Taipei, Taiwan, 31 August–4 September 2015; Volume XL-5/W7, pp. 263–270. [Google Scholar]
- Dimitrov, A.; Golparvar-Fard, M. Segmentation of building point cloud models including detailed architectural/structural features and MEP systems. Automat. Constr. 2015, 51, 32–45. [Google Scholar] [CrossRef]
- Runne, H.; Niemeier, W.; Kern, F. Application of Laser Scanners to Determine the Geometry of Buildings. In Proceedings of the Optical 3-D Measurement Techniques V, Vienna, Austria, 1–4 October 2001; pp. 41–48. [Google Scholar]
- Boulaassal, H.; Chevrier, C.; Landes, T. From Laser Data to Parametric Models: Towards an Automatic Method for Building Façade Modelling. Digital Heritage 2010, 6436, 450–462. [Google Scholar]
- Dore, C.; Murphy, M. Semi-automatic generation of as-built BIM façade geometry from laser and image data. J. Inf. Technol. Constr. 2014, 19, 20–46. [Google Scholar]
- Huber, D.; Akinci, B.; Stambler, A.; Xiong, X.; Anil, E.; Adan, A. Methods for automatically modeling and representing as-built building information models. In Proceedings of the 2011 NSF Engineering Research and Innovation Conference, Atlanta, Georgia, 4–7 January 2011. [Google Scholar]
- Khoshelham, K.; Díaz-Vilariño, L. 3D modelling of interior spaces: Learning the language of indoor architecture. In Proceedings of the ISPRS Technical Commission V Symposium, Riva del Garda, Italy, 23–25 June 2014; Volume XL-5, pp. 321–326. [Google Scholar]
- Oesau, S.; Lafarge, F.; Alliez, P. Indoor scene reconstruction using feature sensitive primitive extraction and graph-cut. ISPRS J. Photogramm. Remote Sens. 2014, 90, 68–82. [Google Scholar] [CrossRef]
- Ochmann, S.; Vock, R.; Wessel, R.; Tamke, M.; Klein, R. Automatic Generation of Structural Building Descriptions from 3D Point Cloud Scans. In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP), Lisbon, Portugal, 5–8 January 2014. [Google Scholar]
- Budroni, A.; Boehm, J. Automatic 3D Modelling of Indoor Manhattan-World Scenes From Laser Data. In Proceedings of the ISPRS Commission V Technical Symposium – Close Range Image Measurement Techniques, Newcastle upon Tyne, UK, 22–24 June 2010; Volume XXXVIII, pp. 115–120. [Google Scholar]
- Mura, C.; Mattausch, O.; Jaspe Villanueva, A.; Gobbetti, E.; Pajarola, R. Automatic room detection and reconstruction in cluttered indoor environments with complex room layouts. Comput. Graph. 2014, 44, 20–32. [Google Scholar] [CrossRef]
- Ikehata, S.; Yang, H.; Furukawa, Y. Structured Indoor Modeling. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1323–1331. [Google Scholar]
- Anagnostopoulos, I.; Pătrăucean, V.; Brilakis, I.; Vela, P. Detection of Walls, Floors, and Ceilings in Point Cloud Data. In Proceedings of the Construction Research Congress 2016, San Juan, Puerto Rico, 31 May–2 June 2016; pp. 2302–2311. [Google Scholar]
- Hong, S.; Jung, J.; Kim, S.; Cho, H.; Lee, J.; Heo, J. Semi-automated approach to indoor mapping for 3D as-built building information modeling. Comput. Environ. Urban Syst. 2015, 51, 34–46. [Google Scholar] [CrossRef]
- Jung, J.; Hong, S.; Jeong, S.; Kim, S.; Cho, H.; Hong, S.; Heo, J. Productive modeling for development of as-built BIM of existing indoor structures. Automat. Constr. 2014, 42, 68–77. [Google Scholar] [CrossRef]
- Thomson, C.; Boehm, J. Automatic geometry generation from point clouds for BIM. Remote Sens. 2015, 7, 11753–11775. [Google Scholar] [CrossRef]
- Tarsha-Kurdi, F.; Landes, T.; Grussenmeyer, P. Hough-Transform and Extended Ransac Algorithms for Automatic Detection of 3D Building Roof Planes From Lidar Data. In Proceedings of the ISPRS Workshop on Laser Scanning 2007, Espoo, Finland, 12–14 September 2007; Volume XXXVI, pp. 407–412. [Google Scholar]
- Díaz-Vilariño, L.; Lagüela, S.; Armesto, J.; Arias, P. Indoor daylight simulation performed on automatically generated as-built 3D models. Energ. Build. 2014, 68, 54–62. [Google Scholar] [CrossRef]
- Valero, E.; Adán, A.; Cerrada, C. Automatic method for building indoor boundary models from dense point clouds collected by laser scanners. Sensors 2012, 12, 16099–16115. [Google Scholar] [CrossRef] [PubMed]
- Boulch, A.; De La Gorce, M.; Marlet, R. Piecewise-planar 3D reconstruction with edge and corner regularization. In Proceedings of the 35th Annual Conference of the European Association for Computer Graphics, Strasbourg, France, 7–11 April 2014; Volume 33, pp. 55–64. [Google Scholar]
- Anagnostopoulos, I.; Belsky, M.; Brilakis, I. Object Boundaries and Room Detection in As-Is BIM Models from Point Cloud Data. In Proceedings of the 16th International Conference on Computing in Civil and Building Engineering, Osaka, Japan, 6–8 July 2016. [Google Scholar]
- Stambler, A.; Huber, D. Building Modeling through Enclosure Reasoning. In Proceedings of the 2014 International Conference on 3D Vision, Tokyo, Japan, 8–11 December 2014; Volume 2, pp. 118–125. [Google Scholar]
- Coughlan, J.; Yuille, A. Manhattan World: compass direction from a single image by Bayesian Ininference. In Proceedings of the International Conference on Computer Vision ICCV’99, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 941–947. [Google Scholar]
- Becker, S.; Peter, M.; Fritsch, D. Grammar-Supported 3D Indoor Reconstruction From Point Clouds for “As-Built” BIM. In Proceedings of the PIA15+HRIGI15 – Joint ISPRS conference, Munich, Germany, 25–27 March 2015; Volume II-3/W4, pp. 17–24. [Google Scholar]
- Vanegas, C.A.; Aliaga, D.G.; Benes, B. Automatic extraction of Manhattan-World building masses from 3D laser range scans. IEEE Trans. Vis. Comput. Graph. 2012, 18, 1627–1637. [Google Scholar] [CrossRef] [PubMed]
- Nüchter, A.; Hertzberg, J. Towards semantic maps for mobile robots. Robot. Auton. Syst. 2008, 56, 915–926. [Google Scholar] [CrossRef]
- Bassier, M.; Vergauwen, M.; Van Genechten, B. Automated Semantic Labelling of 3D Vector Models for Scan-to-BIM. In Proceedings of the 4th Annual International Conference on Architecture and Civil Engineering (ACE 2016), Singapore, 25–26 April 2016; pp. 93–100. [Google Scholar]
- Golovinskiy, A.; Kim, V.G.; Funkhouser, T. Shape-based recognition of 3D point clouds in urban environments. In Proceedings of the IEEE 12th International Conference on Computer Vision, IEEE, Kyoto, Japan, 27 September–4 October 2009; pp. 2154–2161. [Google Scholar]
- Pang, G.; Qiu, R.; Huang, J.; You, S.; Neumann, U. Automatic 3D Industrial Point Cloud Classification and Modeling. In Proceedings of the 14th IAPR International Conference on Machine Vision Applications (MVA), Tokyo, Japan, 18–22 May 2015; pp. 22–25. [Google Scholar]
- Günther, M.; Wiemann, T.; Albrecht, S.; Hertzberg, J. Model-based furniture recognition for building semantic object maps. Artif. Intell. 2017, 247, 336–351. [Google Scholar] [CrossRef]
- Johnson, A.; Hoffman, R.; Osborn, J.; Hebert, M. A System for Semi-automatic Modeling of Complex Environments. In Proceedings of the International Conference on Recent Advances in 3D Digital Imaging and Modeling, Ottawa, ON, Canada, 12–15 May 1997; pp. 213–220. [Google Scholar]
- Nguyen, T.H.; Oloufa, A.A.; Nassar, K. Algorithms for automated deduction of topological information. Automat. Constr. 2005, 14, 59–70. [Google Scholar] [CrossRef]
- Belsky, M.; Sacks, R.; Brilakis, I. Semantic Enrichment for Building Information Modeling. Comput.-Aided Civ. Inf. 2016, 31, 261–274. [Google Scholar] [CrossRef]
- Macher, H.; Landes, T.; Grussenmeyer, P. Point clouds segmentation as base for as-built BIM creation. In Proceedings of the 25th International CIPA Symposium 2015, Taipei, Taiwan, 31 August–4 September 2015; Volume II-5/W3, pp. 191–197. [Google Scholar]
- Macher, H.; Landes, T.; Grussenmeyer, P. Validation of Point Clouds Segmentation Algorithms Through Their Application to Several Case Studies for Indoor Building Modelling. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; Volume XLI-B5, pp. 667–674. [Google Scholar]
- Torr, P.H.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Und. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Murray, J.D.; VanRyper, W. Graphics File Formats. In Encyclopedia of Graphics File Formats, 2nd ed.; O’Reilly: Sebastopol, CA, USA, 1996; pp. 946–952. [Google Scholar]
- BuildingSMART. IFC Overview Summary. Available online: http://www.buildingsmart-tech.org/specifications/ifc-overview (accessed on 28 September 2017).
- Olson, D.L.; Delen, D. Advanced Data Mining Techniques; Springer: Berlin, Germany, 2008; p. 138. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Process | Threshold value |
|---|---|
| Spatial resampling and/or space dimensions | |
| 3D region growing in point clouds | voxel size = multiple of resampling |
| Filter for 2D regions removal in binary image | 1 square metre (∼1100 pixels) |
| Filter for 3D regions removal | 1.8 m (French “Carrez” law) |
| 1.8 m3 (92,000 points for a spatial resampling of 1 cm) | |
| Minimal number of points for a plane | 1800 for a spatial resampling of 1 cm (10 cm × 1.80 m) |
| Conditions to perform an additional plane segmentation (while loop) | number of remaining points: >5% () of initial point cloud OR > 400 () for a spatial resampling of 1 cm (20 cm × 20 cm) |
| the last segmentation must have extracted at least one plane of 1800 points minimum (≥1) | |
| Constraints and quality criteria | |
| Maximum distance between inliers and plane | 2 cm for grounds and ceilings; 5 cm for walls |
| RMSE of planes | 2 cm |
| Horizontal and vertical constraints | maximal angular value of 1 degree ( et ) |
| Criteria for the identification and the reconstruction of walls | maximal distance between planes between 5 cm () and 50 cm () |
| parallelism: maximal angular value of 5 degrees | |
| Data | Individual House | Office Building |
|---|---|---|
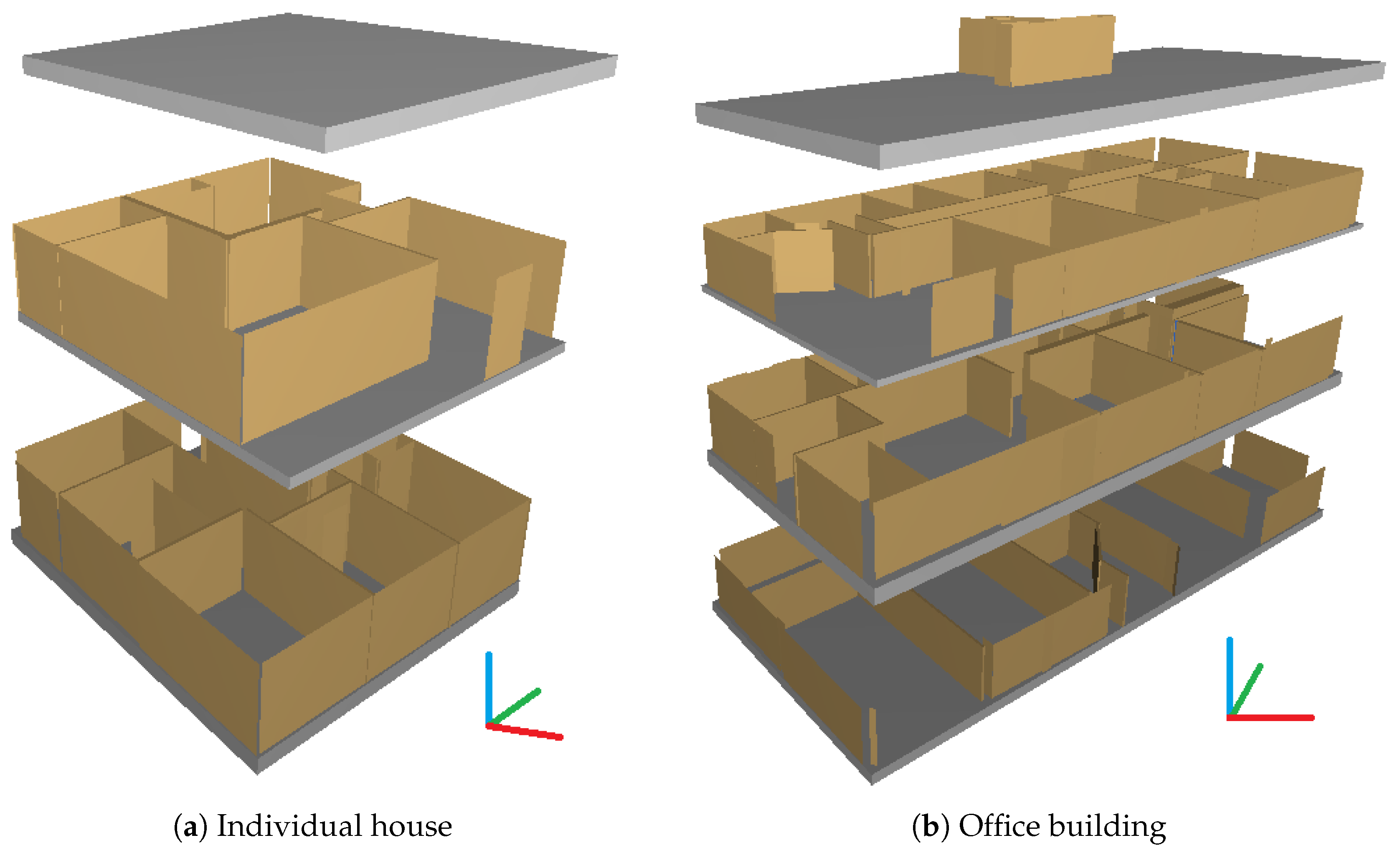
| Results of floor segmentations |  |  |
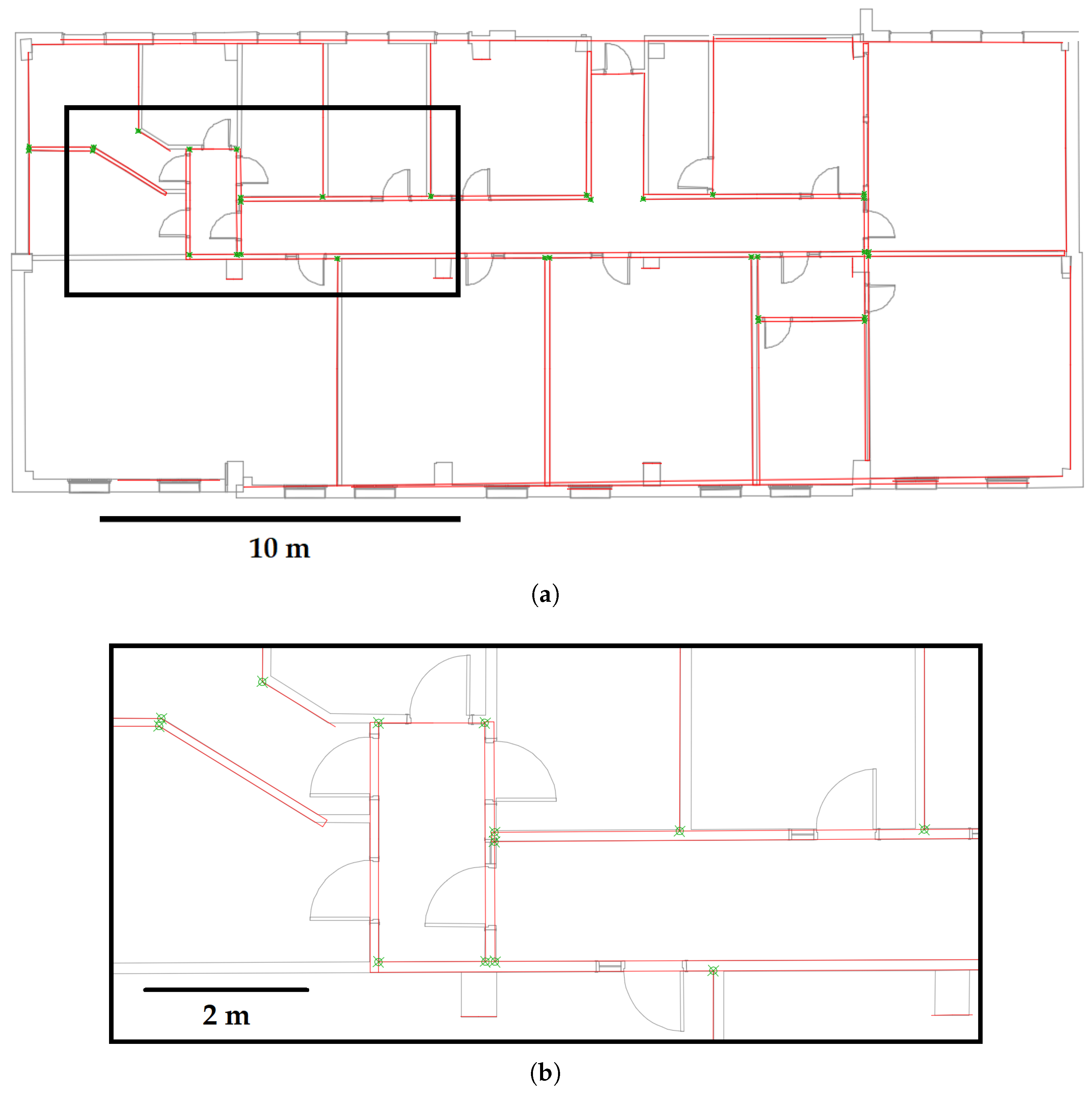
| Results of room segmentations (top view) |  Garden level |  2nd floor |
| Ceilings and Grounds | Walls | Objects | ||
|---|---|---|---|---|
| Individual house | TP | 99% | 89% | 94% |
| FP | 1% | 11% | 6% | |
| FN | 3% | 1% | 21% | |
| Precision | 99% | 89% | 94% | |
| Recall | 97% | 99% | 82% | |
| Office building | TP | 99.5% | 93% | 81% |
| FP | 0.5% | 7% | 19% | |
| FN | 4.5% | 9% | 8% | |
| Precision | 99.5% | 93% | 81% | |
| Recall | 96% | 91% | 91% | |
| Number of Points | Mean of Deviations (cm) | Minimum Deviation (cm) | Maximum Deviation (cm) | ||
|---|---|---|---|---|---|
| Individual house | Garden level | 34 | 1.1 ± 0.8 | 0.2 | 4.4 |
| 1st floor | 23 | 0.9 ± 0.6 | 0.2 | 2.3 | |
| Office building | Ground floor | 20 | 1.1 ± 0.6 | 0.4 | 2.7 |
| 1st floor | 24 | 1.2 ± 0.9 | 0.1 | 3.7 | |
| 2nd floor | 32 | 1.7 ± 1 | 0.6 | 4.1 | |
| 3rd floor | 10 | 1 ± 0.6 | 0.1 | 1.8 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Macher, H.; Landes, T.; Grussenmeyer, P. From Point Clouds to Building Information Models: 3D Semi-Automatic Reconstruction of Indoors of Existing Buildings. Appl. Sci. 2017, 7, 1030. https://doi.org/10.3390/app7101030
Macher H, Landes T, Grussenmeyer P. From Point Clouds to Building Information Models: 3D Semi-Automatic Reconstruction of Indoors of Existing Buildings. Applied Sciences. 2017; 7(10):1030. https://doi.org/10.3390/app7101030
Chicago/Turabian StyleMacher, Hélène, Tania Landes, and Pierre Grussenmeyer. 2017. "From Point Clouds to Building Information Models: 3D Semi-Automatic Reconstruction of Indoors of Existing Buildings" Applied Sciences 7, no. 10: 1030. https://doi.org/10.3390/app7101030
APA StyleMacher, H., Landes, T., & Grussenmeyer, P. (2017). From Point Clouds to Building Information Models: 3D Semi-Automatic Reconstruction of Indoors of Existing Buildings. Applied Sciences, 7(10), 1030. https://doi.org/10.3390/app7101030