Abstract
This paper investigates the degradation of detection performance in FDA–MIMO radar systems caused by signal mismatch under constant-velocity target motion and develops a robust detection strategy to mitigate this effect. Under the effective hypothesis, a stochastic term is introduced into the received radar signal to account for mismatch uncertainty. This term is modeled as a Gaussian random variable whose covariance structure is identical to that of the noise while being scaled by an unknown robustness parameter. Based on the resulting statistical model, three robust detectors are derived using the One-Step Generalized Likelihood Ratio Test (OGLRT), the Two-Step GLRT (TGLRT), and the Gradient test. Simulation results demonstrate that all proposed detectors preserve the Constant False Alarm Rate (CFAR) property under the null hypothesis. Further performance evaluations reveal that, in the absence of signal mismatch, the OGLRT and Gradient detectors provide superior detection performance, whereas under mismatched conditions, all three detectors exhibit improved robustness. These findings provide both theoretical insight and practical guidance for the design and implementation of FDA–MIMO radar systems, contributing to the enhancement and optimization of detection performance in realistic operating environments.
1. Introduction
Moving target detection in frequency diverse array multiple-input multiple-output (FDA–MIMO) radar represents a challenging problem in modern radar signal processing. Owing to the inherent range–angle coupling introduced by frequency diversity, FDA–MIMO radar exhibits a sensing geometry that differs fundamentally from that of conventional phased-array and standard MIMO radar systems, as discussed in Refs. [1,2]. By combining range-dependent beamforming with spatial diversity, FDA–MIMO radar provides improved parameter discrimination capability and has attracted increasing attention in radar sensing and imaging applications, as summarized in Ref. [3]. Despite these advantages, the detection performance of FDA–MIMO radar in practical scenarios is often constrained by model uncertainties rather than by thermal noise alone. In particular, array calibration errors, waveform distortions, and imperfect knowledge of the interference environment lead to mismatches between the assumed and actual target steering vectors, resulting in significant performance degradation in Refs. [4,5,6,7]. When the disturbance covariance matrix is unknown and must be estimated from secondary training data, conventional adaptive detectors may suffer from severe detection loss, especially in sample-limited or partially homogeneous environments in Refs. [8,9,10].
Moreover, the presence of mainlobe deceptive jamming poses a serious challenge to FDA–MIMO radar detection. Due to its coherent nature and angular alignment with the target, mainlobe deceptive jamming is difficult to suppress using conventional spatial filtering techniques. By exploiting the joint range–angle characteristics of FDA structures, several approaches have been proposed to discriminate and suppress deceptive jamming; however, their performance may still deteriorate under covariance mismatch and structured interference conditions in Refs. [11,12,13]. To address the above challenges, robust adaptive detection strategies based on statistical hypothesis testing have been extensively investigated. Likelihood-based detectors such as the generalized likelihood ratio test (GLRT), Rao test, Wald test, and gradient-based detectors have received considerable attention due to their desirable constant false alarm rate (CFAR) properties under unknown covariance matrices in Refs. [6,14,15,16,17]. Recent studies have further extended these frameworks to non-Gaussian and compound-Gaussian clutter environments, which better characterize practical radar interference and sea clutter conditions in Refs. [18,19]. Bayesian and two-step adaptive detectors have also been proposed to improve robustness against interference and steering vector mismatch while maintaining acceptable computational complexity [20].
Motivated by the above considerations, this paper investigates the adaptive target detection problem for FDA–MIMO radar in the presence of signal mismatch and structured interference. A likelihood-based CFAR detector is developed within a rigorous statistical hypothesis testing framework, effectively mitigating the impact of interference and mismatch while preserving the CFAR property. Analytical performance analysis and extensive simulation results are provided to demonstrate the effectiveness and robustness of the proposed approach.
2. Problem Formation
Consider a collocated FDA-MIMO radar with an M-element uniform linear transmit array and an N-element uniform linear receive array. The inter-element spacing of both the transmit and receive arrays is d, and the transmitted orthogonal waveforms consist of K pulses. The carrier frequency of the m-th element is
where denotes the reference carrier frequency and is the frequency increment between adjacent transmit elements, where c represents the propagation speed of electromagnetic waves. A far-field point target is assumed to be located at , where denotes the azimuth angle and is the slant range. The target moves toward the radar with a constant radial velocity .
After downconversion and matched filtering at the receiver, the echoes corresponding to the K pulses can be collected and arranged into a data matrix, which can be expressed as
where collect the received data, noise, and mismatch components over K pulses, and is the Doppler steering vector, denotes the complex reflection coefficient of the target, and represents the joint transmit–receive steering vector; let denote the wavelength corresponding to the reference carrier frequency, whose explicit form is given by
where ⊗ denotes the Kronecker product.
Specifically, the transmit steering vector and the receive steering vector are denoted by and , respectively, corresponding to the transmitting and receiving uniform linear arrays. The joint transmit–receive steering vector is constructed from these two vectors through their Kronecker product. In addition, the operator ⊗ denotes the Kronecker product, and represents the transpose. The vector denotes the Doppler steering vector, whose expression is given by
where K denotes the number of transmitted pulses and determines the dimension of the Doppler steering vector, and denotes the pulse repetition interval (PRI). The matrix represents the noise matrix, where the covariance matrix of , denoted by , is unknown in practice. The matrix denotes an artificially injected random signal, which is introduced to model the interference affecting the received signal. The matrix P can be partitioned as
we assume that are independent and identically distributed (i.i.d.) complex Gaussian random vectors with zero mean and covariance , that is
where is a nonnegative unknown parameter introduced to quantify and control the robustness of the detector. The covariance matrix is employed to enhance signal energy detection under signal mismatch conditions, which facilitates favoring the correct hypothesis in binary hypothesis testing [21]. Furthermore, it is assumed that the virtual signal and the noise component are statistically independent and that the covariance structure of the virtual signal is identical to that of the noise covariance matrix .
When considering the operation of FDA-MIMO radar in noise environments that include receiver thermal noise as well as suppression interference or compensated clutter [22,23,24], training data can be extracted from angle cells or range cells surrounding the cell under test (CUT) to estimate the unknown covariance matrix, which can significantly improve detection performance. Therefore, this work focuses on the design of detectors based on training data and derives their statistical performance. Let denote the training data matrix, where , are (i.i.d.) training samples sharing the same noise covariance matrix as the test data. Under these assumptions, the received test data can be expressed as
similarly, under the null hypothesis , we have
Furthermore, the detection problem associated with the binary hypotheses can be formulated as
Under the alternative hypothesis , the joint probability density function (PDF) is given by
where is given by
and denotes the sample covariance matrix, given by , where
Similarly, the joint probability density function (PDF) under the null hypothesis can be expressed as
3. Detector Design
3.1. OGLRT
The one-step GLRT (OGLRT) can be expressed
First, to optimize the molecular component, we derive the maximum likelihood estimate (MLE) of the covariance matrix for . By taking the logarithm, differentiating with respect to , and equating the derivative to zero, the MLE of is obtained:
substituting (15) into (10) yields
For notational convenience, the following transformed variables are introduced as
Accordingly, (16) can be equivalently expressed as
Consequently, maximizing (18) is equivalent to minimizing the following expression
Let denote the projection matrix of and represent the orthogonal projection matrix. Further simplification yields:
The second equality employs the inequality [25]: , where A is a Hermitian positive definite matrix and B is a Hermitian positive semidefinite matrix with compatible dimensions. Equality holds if , where
Multiplying both sides of Equation (16) by (left) and (right) yields the MLE of the unknown amplitude as
inserting (25) into (20) give
where .
Under hypothesis , the covariance matrix estimate is given by
substituting (13) and (27) into the likelihood function leads to
by incorporating (14), (16), (26), and (28), the OGLRT detector for a given is obtained as
According to Ref. [26], the unknown parameter can be determined as
where is the unique positive solution of (30) in .
where b denotes the unknown parameter, and R represent the nonzero eigenvalues and rank of , respectively. Substituting (30) and simplifying yields the final OGLRT detector expression
3.2. TGLRT
The formulation of the TGLRT detector follows a two-stage strategy. Initially, the covariance matrix is assumed to be known, under which a closed-form expression of the detection statistic can be obtained. Subsequently, to make the detector practically implementable, the unknown covariance matrix is replaced with its sample-based estimate derived from the available training data. Through this procedure, the final analytical expression of the TGLRT detector is established and is presented below
inserting (10) and (13) into (33) results in
simplifying and taking the logarithm yields:
To obtain the maximum likelihood estimate (MLE) of , set the derivative of the log-likelihood function with respect to to zero:
the resulting estimate is given by
substituting (37) into (35) yields
next, the maximum likelihood estimate of is obtained by solving
From the above derivations, it follows that
Substituting (40) into (38) yields
by combining (35) and (41), the following test statistic is obtained
Finally, substituting the sample covariance matrix yields the final detector expression
where .
3.3. Gradient Test
The general complex parameter gradient test with nuisance parameters is given as
It is straightforward to verify that
where is the MLE of under , is the value of under , is the MLE of under , denotes the detection threshold.
By substituting into the test statistic (44), the following expression is obtained
Under hypothesis under , the expressions reported below are obtained by evaluating the partial derivative of the logarithm of the joint probability density function in (10) with respect to , following the principles of complex matrix calculus
From the test statistic (44), it can be seen that the MLE of under and the MLE of under are also needed. After some calculation, we obtain
where and denote the maximum likelihood estimates of under hypotheses and , respectively, for given values of and . By substituting into the joint probability density function in (10), the maximum likelihood estimate of for a fixed can be obtained by solving
from which the MLE for is obtained as
Subsequently, substituting and into the joint density function , the maximum likelihood estimate of is obtained by minimizing
with respect to . By exploiting the properties of the determinant, the MLE of can be derived accordingly [27]
where .
4. Simulation Results
In this section, we provide numerical simulation results to validate the effectiveness of our proposed approaches. Suppose we use a pulsed Doppler radar, we set , , which operates at . The array has an inter-elements pacing as . The slant distance of the target is , the azimuth angle is , the radial velocity is , and the pulse repetition interval is . The range and direction for the target of interest are . We assume there are two false targets generated by the deceptive jammer, with their locations being and , , respectively. Moreover, we model the noise covariance matrix R as exponentially shaped with the entry being
where denotes the power of disturbance and without otherwise stated . The definition of signal-to-noise ratio (SNR), in decibel, is given by
while the jamming-to-noise ratio (JNR) is defined as
unless otherwise stated, L = 2 and JNR = 5 dB.
Due to the composite nature of the proposed adaptive detectors, which involve nuisance-parameter estimation and covariance matrix learning from secondary data, a closed-form expression of the false-alarm probability under is analytically intractable. Therefore, the CFAR property of the proposed OGLRT, TGLRT, and Gradient detectors is assessed empirically via Monte Carlo (MC)-based threshold calibration.
Specifically, for a prescribed false-alarm probability , the detection thresholds are obtained by performing independent noise-only Monte Carlo trials under . The detection probabilities are then evaluated using independent trials under . This procedure is consistently applied to all detectors to ensure a fair comparison.
To further examine the robustness and statistical stability of the empirical CFAR calibration, the threshold estimation procedure is repeated multiple times for each parameter setting. The resulting mean values and standard deviations of the thresholds indicate a very limited variability, confirming that the calibrated thresholds are statistically stable. Moreover, the achieved false-alarm probability is verified by applying the calibrated thresholds to an additional large set of independent noise-only realizations, showing that the empirical false-alarm rates closely match the nominal value across different noise power levels and correlation coefficients.
The results demonstrate that the proposed detectors maintain a nearly constant false-alarm behavior with respect to variations in the disturbance power and correlation structure, providing strong empirical evidence of CFAR performance in practical scenarios where the exact distribution of the test statistics is unavailable.
Figure 1a,b illustrate the CFAR characteristics of the OGLRT, TGLRT, and Gradient detectors. In particular, Figure 1a depicts how the detection thresholds vary with different noise power levels denoted by , whereas Figure 1b presents the corresponding thresholds as functions of the parameter . An examination of these figures reveals that the thresholds associated with the three detectors exhibit only minor variations as either or changes. This observation confirms that the proposed OGLRT, TGLRT, and TGradient detectors maintain CFAR behavior with respect to both the noise power and the parameter , which characterizes the structure of the covariance matrix .
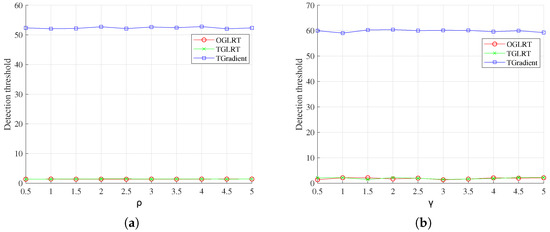
Figure 1.
Detection threshold versus (a) noise power and (b) correlation coefficient .
Figure 2a and Figure 2b illustrate the detection probability versus SNR for cases where the number of training data matrices is set to 4 and 6, respectively. The curve denoted as benchmark corresponds to the theoretical performance limit of the OGLRT, TGLRT, and TGradient detectors, which is derived from (29). It is worth noting that the analytical results given in (42) and (59) can also be treated as benchmark references, since all three expressions (29), (42) and (59) are obtained under the assumption that the covariance matrix structure is perfectly known. the label “no” denotes detectors in which the virtual signal introduced in this chapter is not taken into account, including OGLRT-no, and TGLRT-no. From Figure 2a, it can be seen that the OGLRT and TGradient detectors exhibit almost indistinguishable detection behavior and slightly outperform the TGLRT detector. In addition, Figure 2b demonstrates that increasing the amount of training data leads to a convergence in detection performance among all detectors, accompanied by a noticeable reduction in the discrepancy between the simulated results and the theoretical upper bound.
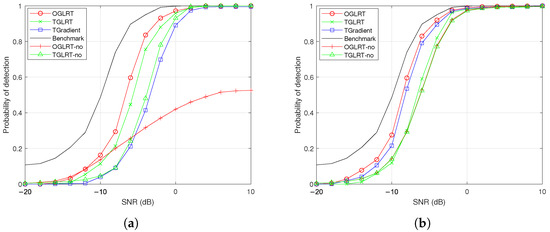
Figure 2.
Detection probability versus SJNR = for different training data and different numbers of snapshots in the absence of signal mismatch when (a) L = 4, K = 4, (b) L = 6, K = 4.
However, in practical radar systems, deviations between the ideal steering vector and the actual received signal [28,29,30] commonly arise due to factors such as array calibration inaccuracies and waveform mismatch. To quantitatively describe the extent of this discrepancy, the generalized squared cosine function is adopted as an effective metric [11,31] for measuring the similarity between the nominal and mismatched steering vectors. Using this measure, the level of mismatch can be systematically characterized, and the corresponding formulation is expressed as follows.
the parameter quantifies the signal mismatch error in the spatial-range domain, where and denote the actual and ideal transmit-receive steering vectors, respectively. Analogously, is defined to characterize the Doppler-dimension signal mismatch, the expression is
where and are the actual and ideal Doppler steering vectors, respectively.
Figure 3a–c depict the relationship between detection probability and the signal-to-jammer-plus-noise ratio (SJNR) under signal mismatch across different dimensions. As shown in Figure 3b, when mismatch occurs in the transmit–receive dimensional signal, the proposed TGLRT and TGradient detectors preserve comparatively high detection performance, indicating strong robustness against such mismatch. Conversely, the OGLRT detector experiences a pronounced degradation in performance under the same conditions. In contrast, the OGLRT detectors do not incorporate virtual signals show higher selectivity but reduced robustness. Figure 3c illustrates the detection results in the presence of Doppler-domain signal mismatch, where all detectors exhibit performance degradation to varying extents. A comparative analysis of Figure 3b,c further reveals that, for an identical level of signal mismatch, discrepancies in the transmit–receive dimension exert a more substantial adverse effect on detection performance than those in the Doppler dimension.
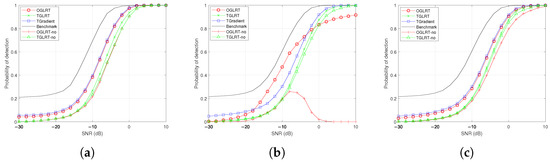
Figure 3.
Detection probability versus SJNR under signal mismatch for different signal dimensions, with L = 6 and K = 4: (a) no signal mismatch, (b) , , (c) , .
Figure 4 presents the detection probability as a function of the mismatch level for different detectors under signal mismatch conditions. The results indicate that the proposed TGLRT and TGradient detectors maintain stable detection performance as the mismatch level increases, demonstrating strong robustness against signal mismatch. In contrast, the OGLRT detector exhibits a more pronounced performance degradation under severe mismatch conditions. Overall, the comparative results confirm that the detection strategies developed in this work achieve reliable performance and enhanced robustness in the presence of signal mismatch.
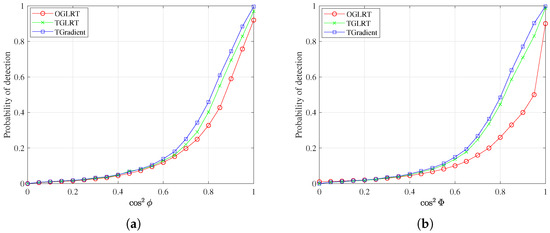
Figure 4.
Detection probability versus mismatch level for different detectors under signal mismatch, with L = 6 and K = 4. (a) , (b) .
To evaluate the computational complexity of the proposed detector, the average execution time of eight competing detectors is investigated under a fixed false alarm probability , with , , , and . For both threshold determination and detection probability estimation, independent MC trials are performed.
The mean operation time is obtained by averaging over ten independent experiments, and the results are summarized in Table 1. It is observed that the OGLRT test exhibits the lowest computational cost, whereas the TGradient detector incurs the highest computational burden among the considered detectors.

Table 1.
Computation complexity of the detectors.
5. Conclusions
To address the problem of robust target detection in FDA–MIMO radar systems under signal mismatch, this paper developed a likelihood-based detection framework and derived three CFAR detectors based on different statistical criteria. The simulation results demonstrate that under matched signal conditions, the OGLRT and TGradient detectors achieve superior detection performance, showing higher detection probability compared with the TGLRT detector. However, when signal mismatch occurs, the TGLRT and TGradient detectors exhibit improved robustness, maintaining more stable detection performance, whereas the OGLRT detector experiences more noticeable degradation. Overall, the TGradient detector provides a favorable balance between detection capability and robustness, performing consistently well under both matched and mismatched scenarios. The proposed modeling strategy and detector designs offer practical and flexible solutions for FDA–MIMO radar systems operating in realistic environments where signal uncertainty cannot be ignored.
Author Contributions
Conceptualization, Y.C.; methodology, Y.C. and Y.L.; software, Y.L.; validation, Y.C. and Y.L.; formal analysis, Y.L.; investigation, Y.C.; resources, Y.C.; data curation, Y.L.; writing—original draft preparation, Y.L.; writing—review and editing, Y.C.; visualization, Y.L.; supervision, Y.C.; project administration, Y.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors upon request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Munson, N.R.; Correll, B.; Narayanan, R.M.; Bufler, T.D. Experimental Test of Continuous Wave Frequency Diverse Array Doppler Radar. Appl. Sci. 2025, 15, 7337. [Google Scholar] [CrossRef]
- Wang, W.-Q. Overview of Frequency Diverse Array in Radar and Navigation Applications. IET Radar Sonar Navig. 2016, 10, 1001–1012. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; Zhu, S.; So, H.C. Deceptive Jamming Suppression with Frequency Diverse MIMO Radar. Signal Process. 2015, 113, 9–17. [Google Scholar] [CrossRef]
- Huang, B.; Wang, W.-Q.; Li, P.; Jian, J.; Jia, Y.; Jia, W.; Liao, T. Adaptive Target Detection for an FDA-MIMO Radar in a Mainlobe Deceptive Jamming and a Partially Homogeneous Noise. Digit. Signal Process. 2024, 152, 104583. [Google Scholar] [CrossRef]
- Zeng, L.; Wang, Y.-L.; Liu, W.; Liu, J.; Lan, L. GLRT-Based Detectors for FDA-MIMO Radar with Training Data. Digit. Signal Process. 2022, 130, 103729. [Google Scholar] [CrossRef]
- Gui, R.; Wang, W.-Q.; Zheng, Z. Low-Complexity GLRT for FDA Radar without Training Data. Digit. Signal Process. 2020, 107, 102861. [Google Scholar] [CrossRef]
- Kay, S.M. Statistical Signal Processing, Volume II: Detection Theory; Prentice Hall: Englewood Cliffs, NJ, USA, 1998. [Google Scholar]
- Kelly, E.J. An Adaptive Detection Algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef]
- Ward, J. Space-Time Adaptive Processing for Airborne Radar. In Proceedings of the IEE Colloquium on Space-Time Adaptive Processing; IEE: London, UK, 1998; pp. 2/1–2/6. [Google Scholar] [CrossRef]
- De Maio, A. Robust Adaptive Radar Detection in the Presence of Steering Vector Mismatches. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1322–1337. [Google Scholar] [CrossRef]
- Bandiera, F.; Besson, O.; Ricci, G. An ABORT-like detector with improved mismatched signals rejection capabilities. IEEE Trans. Signal Process. 2007, 56, 14–25. [Google Scholar] [CrossRef]
- He, C.; Zhang, R.; Huang, B.; Xu, M.; Wang, Z.; Liu, L.; Lu, Z.; Jin, Y. Moving-Target Detection for FDA-MIMO Radar in Partially Homogeneous Environments. Electronics 2024, 13, 851. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.; Gong, J.; Tan, M.; Chen, G. Robust Suppression of Deceptive Jamming with VHF-FDA-MIMO Radar under Multipath Effects. Remote Sens. 2022, 14, 942. [Google Scholar] [CrossRef]
- Han, S.; Pallotta, L.; Huang, X.; Giunta, G.; Orlando, D. A sparse learning approach to the design of radar tunable architectures with enhanced selectivity properties. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3840–3853. [Google Scholar] [CrossRef]
- Lemonte, A. The Gradient Test: Another Likelihood-Based Test; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Terrell, G.R. The Gradient Statistic. Comput. Sci. Stat. 2002, 34, 206–215. [Google Scholar]
- Wang, Z.; Liu, J.; Chen, H.; Yang, W. Adaptive Robust Radar Target Detector Based on Gradient Test. Remote Sens. 2022, 14, 5236. [Google Scholar] [CrossRef]
- Wu, H.; Dong, L.; Wang, Z.; He, Z.; He, X. Adaptive detection in nonzero-mean compound Gaussian sea clutter with inverse Gamma texture. In Proceedings of the IGARSS 2023–2023 IEEE International Geoscience and Remote Sensing Symposium; IEEE: Piscataway, NJ, USA, 2023; pp. 6588–6591. [Google Scholar]
- Wu, H.; Guo, H.; Wang, Z.; He, Z. Rao and Wald Tests in Nonzero-Mean Non-Gaussian Sea Clutter. Remote Sens. 2025, 17, 1696. [Google Scholar] [CrossRef]
- Xiao, D.; Liu, W.; Liu, J.; Wu, Y.; Du, Q.; Hua, X. Bayesian Rao Test for Distributed Target Detection in Interference and Noise with Limited Training Data. Sci. China Inf. Sci. 2026, 69, 122301. [Google Scholar] [CrossRef]
- Sun, S.; Liu, J.; Liu, W.; Jian, T. Robust Detection of Distributed Targets Based on Rao Test and Wald Test. Signal Process. 2021, 180, 107801. [Google Scholar] [CrossRef]
- Xu, J.; Zhu, S.; Liao, G. Space-Time-Range Adaptive Processing for Airborne Radar Systems. IEEE Sens. J. 2015, 15, 1602–1610. [Google Scholar] [CrossRef]
- Xu, J.; Zhu, S.; Liao, G. Range Ambiguous Clutter Suppression for Airborne FDA-STAP Radar. IEEE J. Sel. Top. Signal Process. 2015, 9, 1620–1631. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; So, H.C. Space-Time Adaptive Processing with Vertical Frequency Diverse Array for Range-Ambiguous Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5352–5364. [Google Scholar] [CrossRef]
- Lütkepohl, H. Handbook of Matrices; John Wiley & Sons Ltd.: Chichester, UK, 1996. [Google Scholar]
- Coluccia, A.; Fascista, A.; Ricci, G. A Novel Approach to Robust Radar Detection of Range-Spread Targets. Signal Process. 2020, 166, 107223. [Google Scholar] [CrossRef]
- Kelly, E.J.; Forsythe, K.M. Adaptive Detection and Parameter Estimation for Multidimensional Signal Models; Technical Report; Lincoln Laboratory, Massachusetts Institute of Technology: Lexington, MA, USA, 1989. [Google Scholar]
- Bandiera, F.; Orlando, D.; Ricci, G. Advanced Radar Detection Schemes under Mismatched Signal Models; Springer Nature: Cham, Switzerland, 2022. [Google Scholar]
- Gu, Y.; Goodman, N.A.; Hong, S.; Li, Y. Robust Adaptive Beamforming Based on Interference Covariance Matrix Sparse Reconstruction. Signal Process. 2014, 96, 375–381. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Zhang, C.; Li, H.; Wang, X. Performance Prediction of Subspace-Based Adaptive Detectors with Signal Mismatch. Signal Process. 2016, 123, 122–126. [Google Scholar] [CrossRef]
- Liu, J.; Liu, W.; Chen, B.; Liu, H.; Li, H. Detection Probability of a CFAR Matched Filter with Signal Steering Vector Errors. IEEE Signal Process. Lett. 2015, 22, 2474–2478. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.