Author Contributions
Conceptualization, T.-W.W. and H.-P.H.; Funding acquisition, H.-P.H.; Methodology, T.-W.W. and Y.-L.Z.; Project administration, H.-P.H.; Resources, H.-P.H.; Software, T.-W.W. and Y.-L.Z.; Supervision, H.-P.H.; Validation, T.-W.W. and Y.-L.Z.; Visualization, T.-W.W.; Writing—original draft, T.-W.W. and Y.-L.Z.; Writing—review and editing, T.-W.W., H.-P.H. and Y.-L.Z. All authors have read and agreed to the published version of the manuscript.
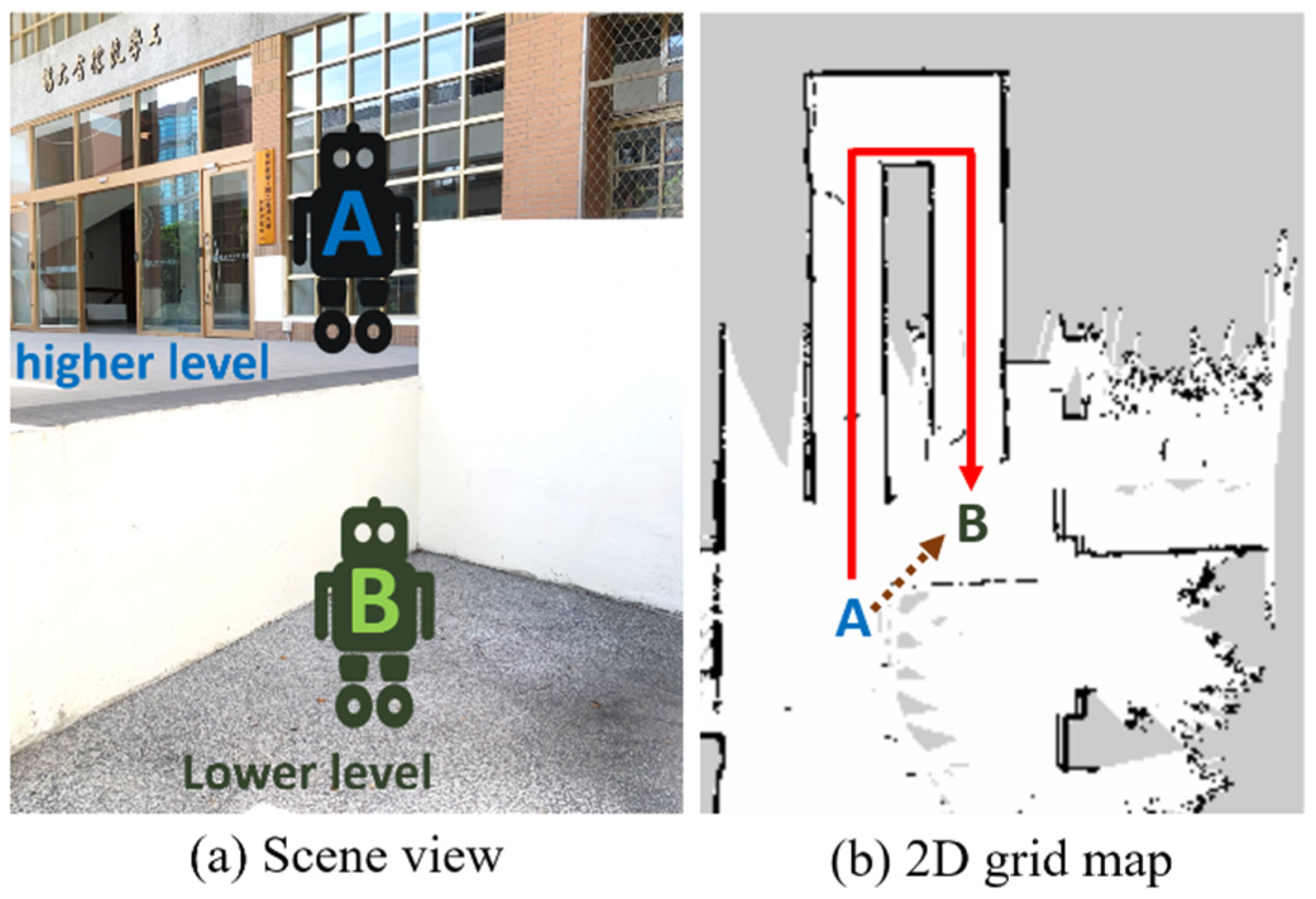
Figure 1.
Navigation on the wheelchair ramp. An unfeasible path (dotted arrow) is calculated on the 2D grid map, while the solid arrow is the path passing through multilevel environments.
Figure 1.
Navigation on the wheelchair ramp. An unfeasible path (dotted arrow) is calculated on the 2D grid map, while the solid arrow is the path passing through multilevel environments.
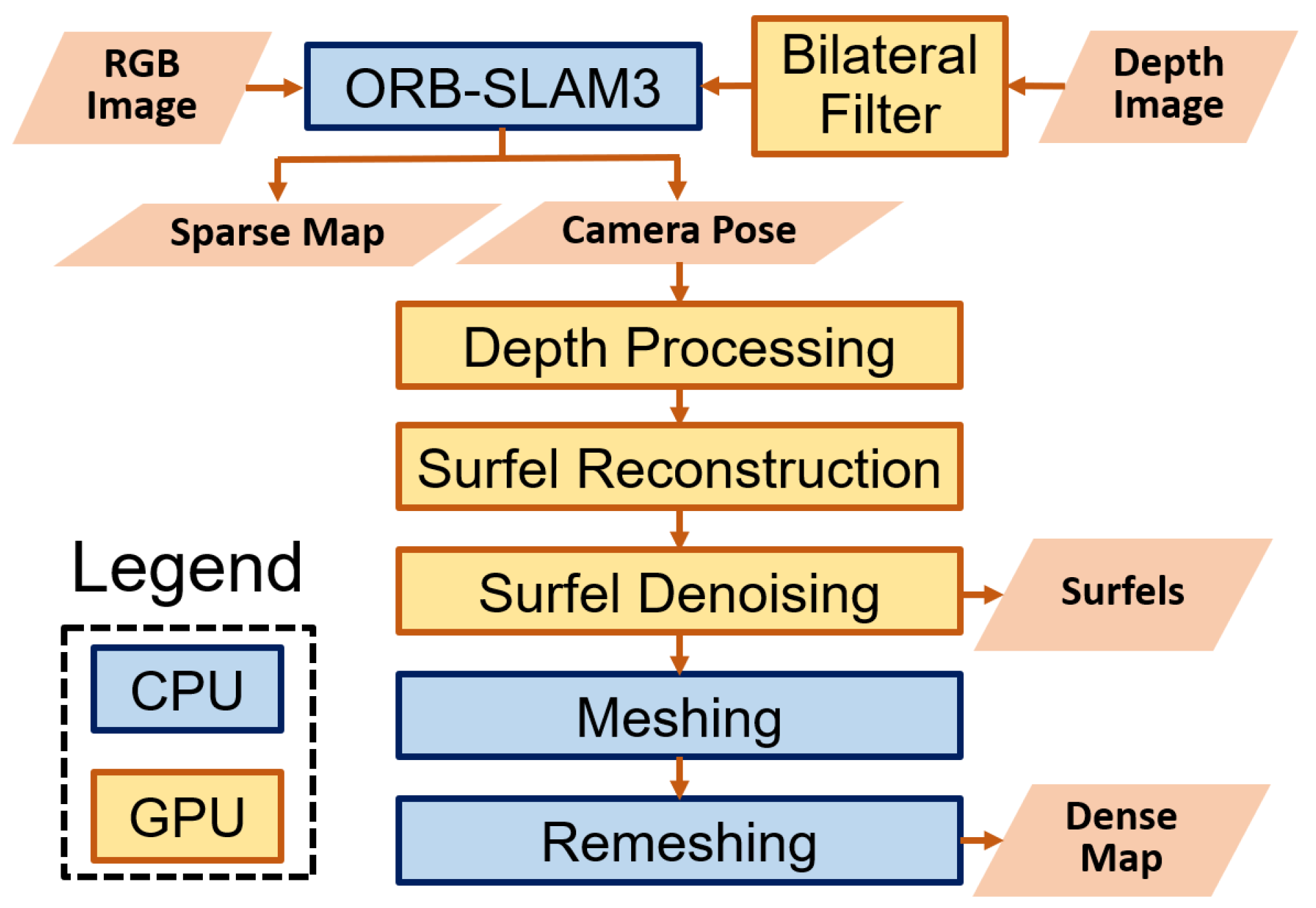
Figure 2.
Real-time pipeline for 3D reconstruction.
Figure 2.
Real-time pipeline for 3D reconstruction.
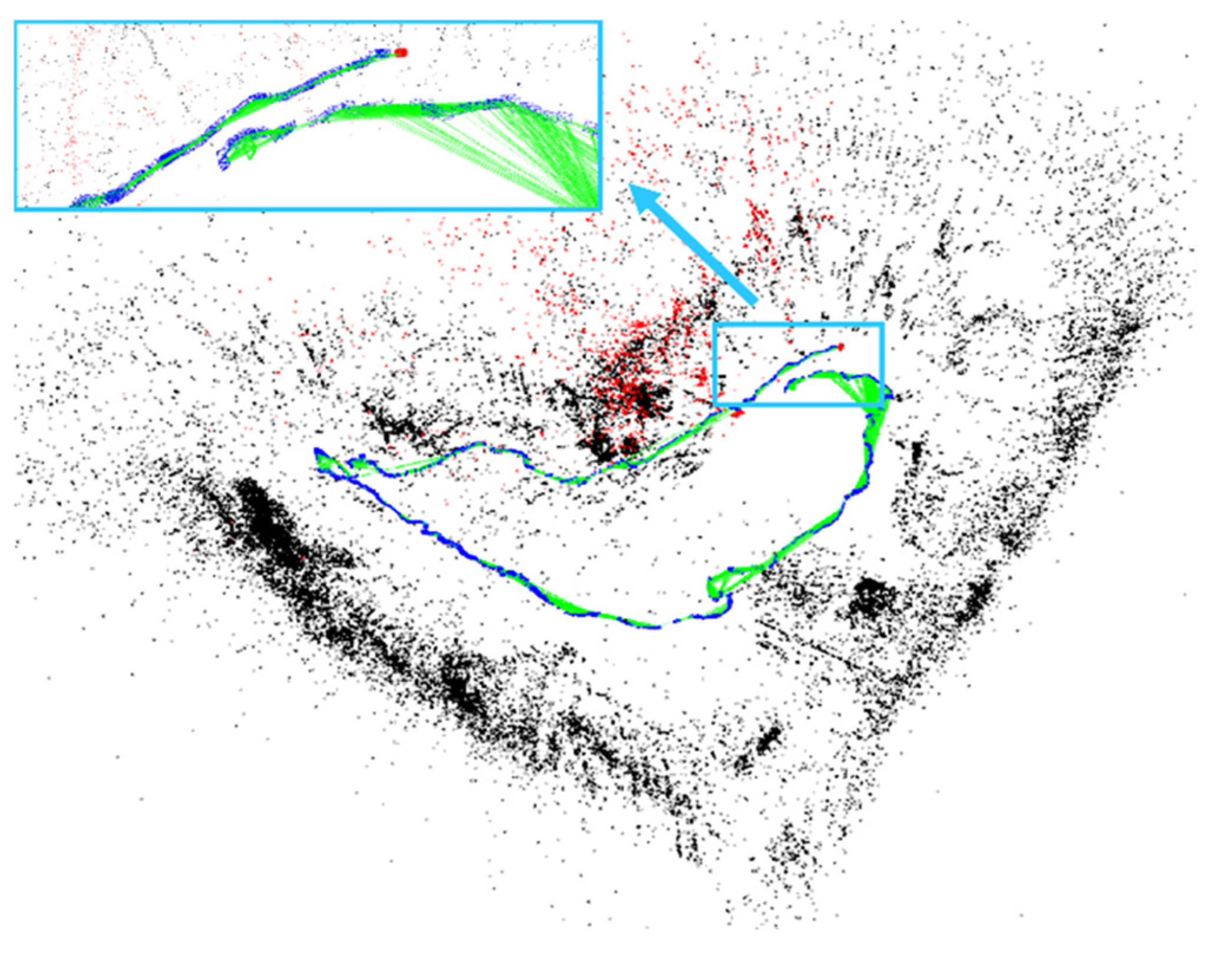
Figure 3.
Large drifts without optimization displayed by directly performing ORB-SLAM3 on the TUM fr2/largeloop dataset. Black points represent the static map points, while red points indicate active map points currently being tracked. This also applies to similar figures below.
Figure 3.
Large drifts without optimization displayed by directly performing ORB-SLAM3 on the TUM fr2/largeloop dataset. Black points represent the static map points, while red points indicate active map points currently being tracked. This also applies to similar figures below.
Figure 4.
Loop closing activated by performing our proposed method on the TUM fr2/largeloop dataset. The edges of current camera poses and several previously visited features become constrained.
Figure 4.
Loop closing activated by performing our proposed method on the TUM fr2/largeloop dataset. The edges of current camera poses and several previously visited features become constrained.
Figure 5.
The sparse map constructed outside the Building of Engineering Building at National Taiwan University (NTU).
Figure 5.
The sparse map constructed outside the Building of Engineering Building at National Taiwan University (NTU).
Figure 6.
Mesh reconstruction outside the Building of Engineering Building at NTU.
Figure 6.
Mesh reconstruction outside the Building of Engineering Building at NTU.
Figure 7.
The sparse map is constructed from the third floor in the Building of Engineering Building at NTU.
Figure 7.
The sparse map is constructed from the third floor in the Building of Engineering Building at NTU.
Figure 8.
Mesh reconstruction on the third floor in the Building of Engineering Building at NTU.
Figure 8.
Mesh reconstruction on the third floor in the Building of Engineering Building at NTU.
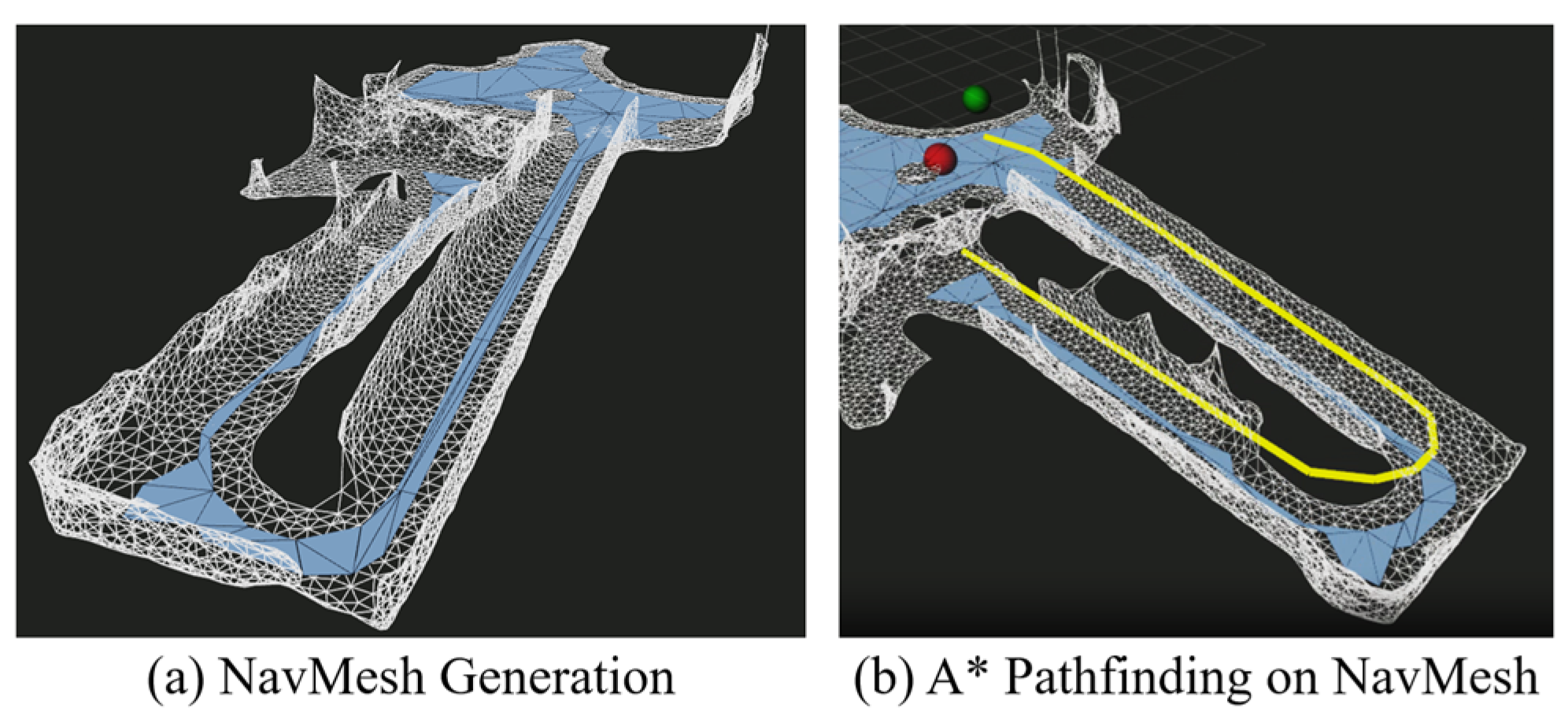
Figure 9.
Navigation mesh outside the Building of Engineering Building at NTU.
Figure 9.
Navigation mesh outside the Building of Engineering Building at NTU.
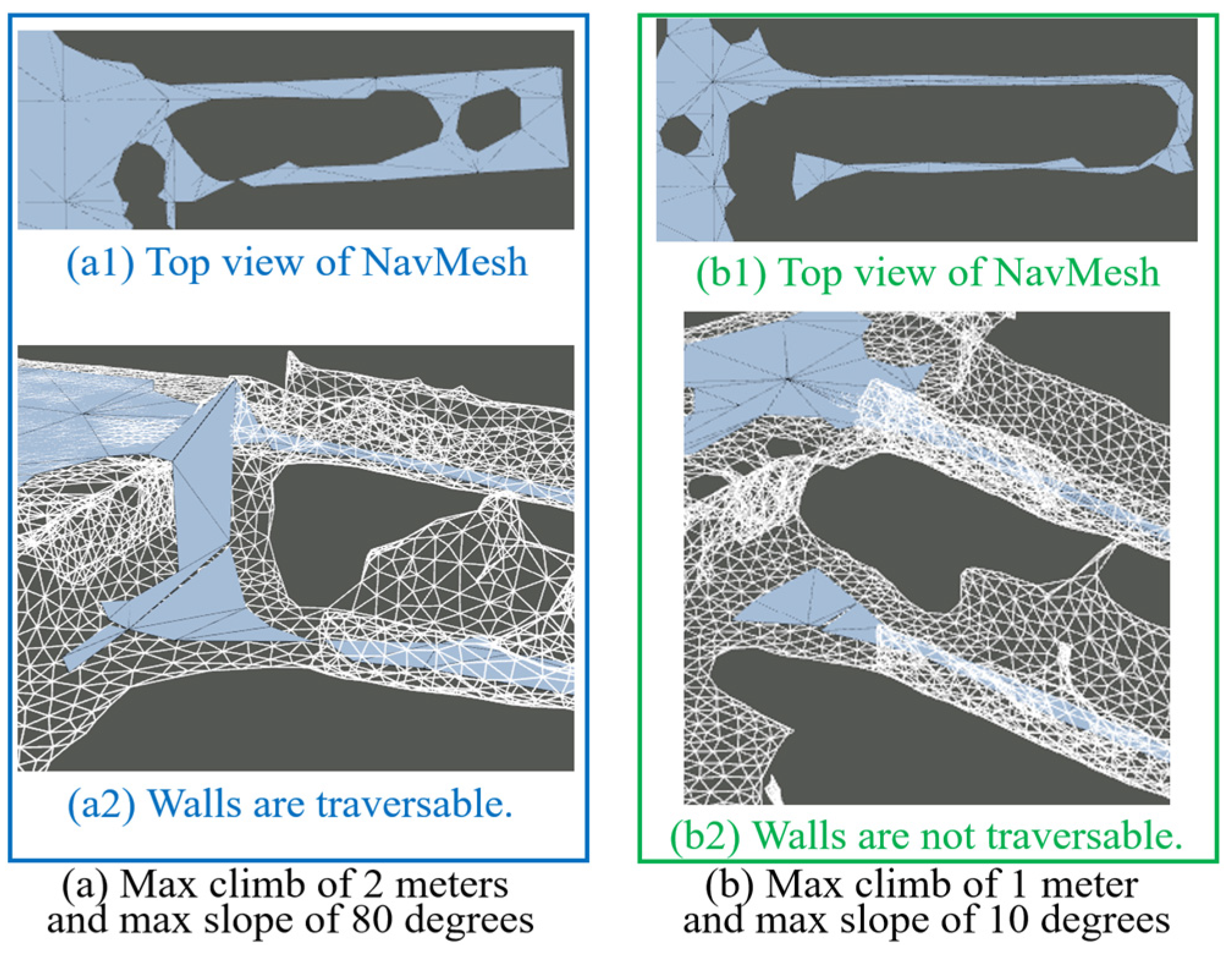
Figure 10.
Different walkable areas of NavMesh.
Figure 10.
Different walkable areas of NavMesh.
Figure 11.
A* pathfinding on different NavMesh structures outside the building. The maximum lengths of edges in (a), (b), and (c) are 0.8, 10, and 30 m, respectively, while the maximum errors of the edges in (a), (b), and (c) are 0.1, 1, and 10 m, respectively.
Figure 11.
A* pathfinding on different NavMesh structures outside the building. The maximum lengths of edges in (a), (b), and (c) are 0.8, 10, and 30 m, respectively, while the maximum errors of the edges in (a), (b), and (c) are 0.1, 1, and 10 m, respectively.
Figure 12.
A* pathfinding on different NavMesh structures on the third floor. The parameters in (a–c) are the same as those on the first floor.
Figure 12.
A* pathfinding on different NavMesh structures on the third floor. The parameters in (a–c) are the same as those on the first floor.
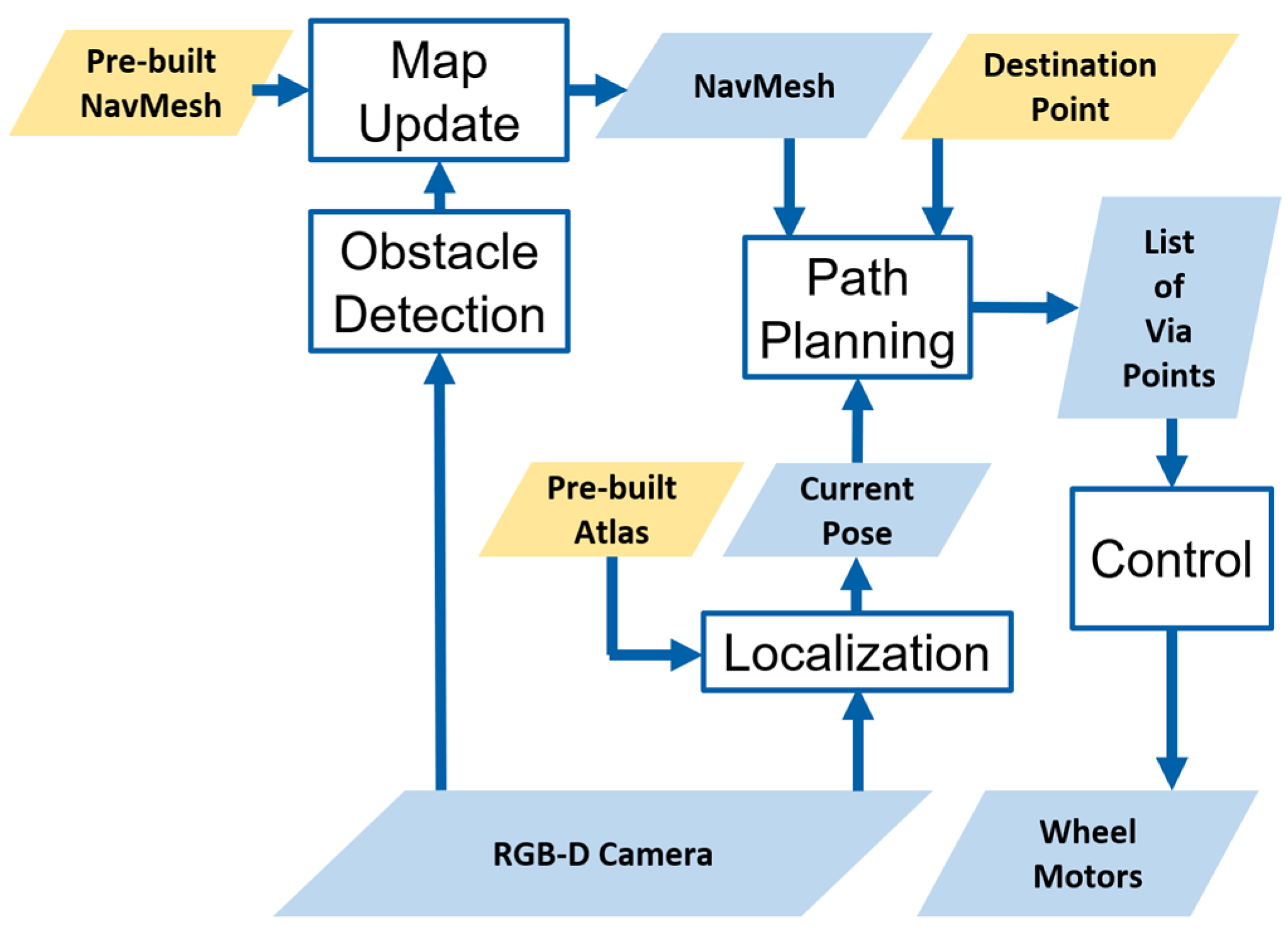
Figure 13.
System architecture.
Figure 13.
System architecture.
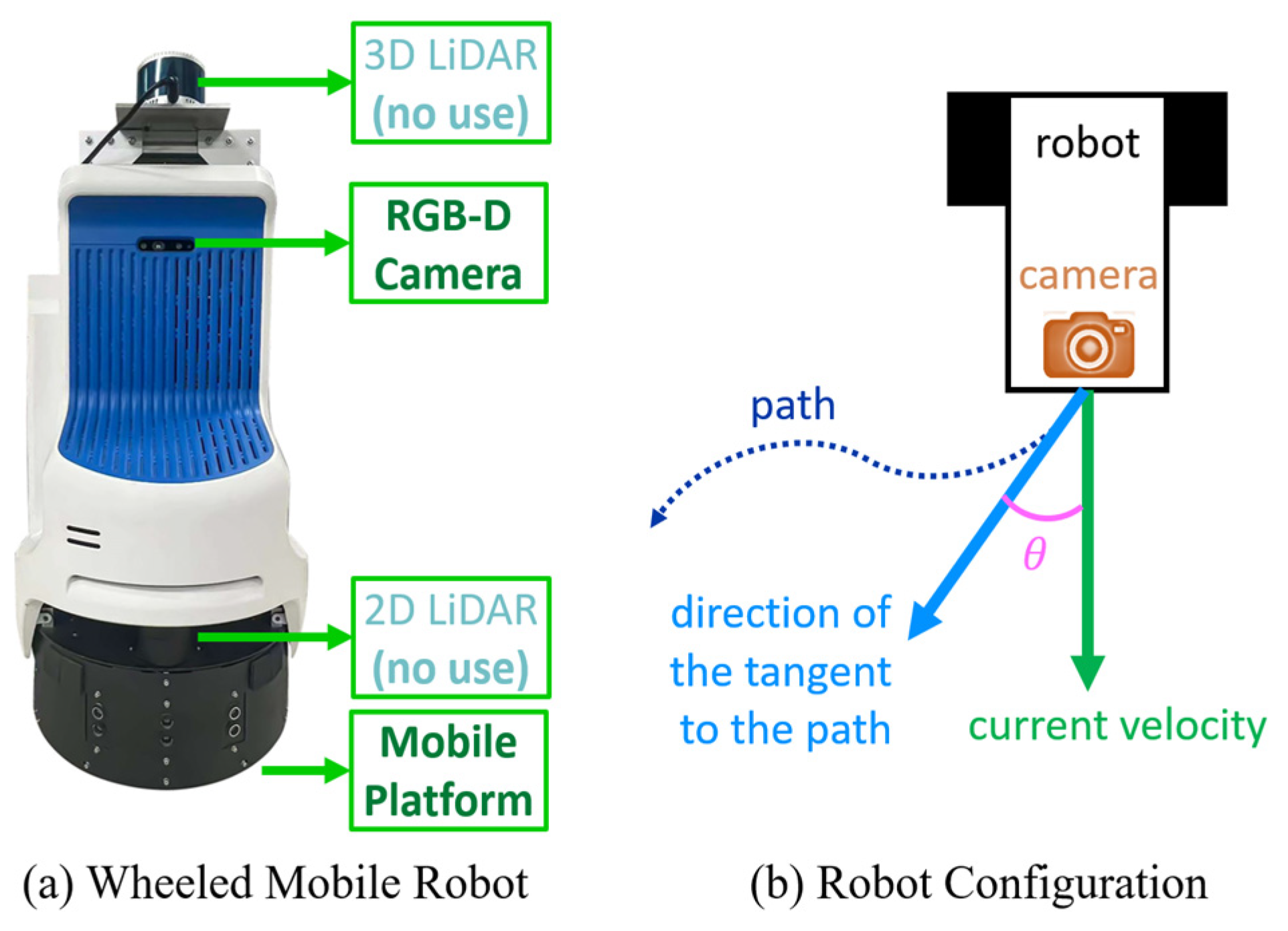
Figure 14.
The wheeled mobile robot equipped with an RGB-D camera. A note should be made that 3D LiDAR and 2D LiDAR are not used in this study.
Figure 14.
The wheeled mobile robot equipped with an RGB-D camera. A note should be made that 3D LiDAR and 2D LiDAR are not used in this study.
Figure 15.
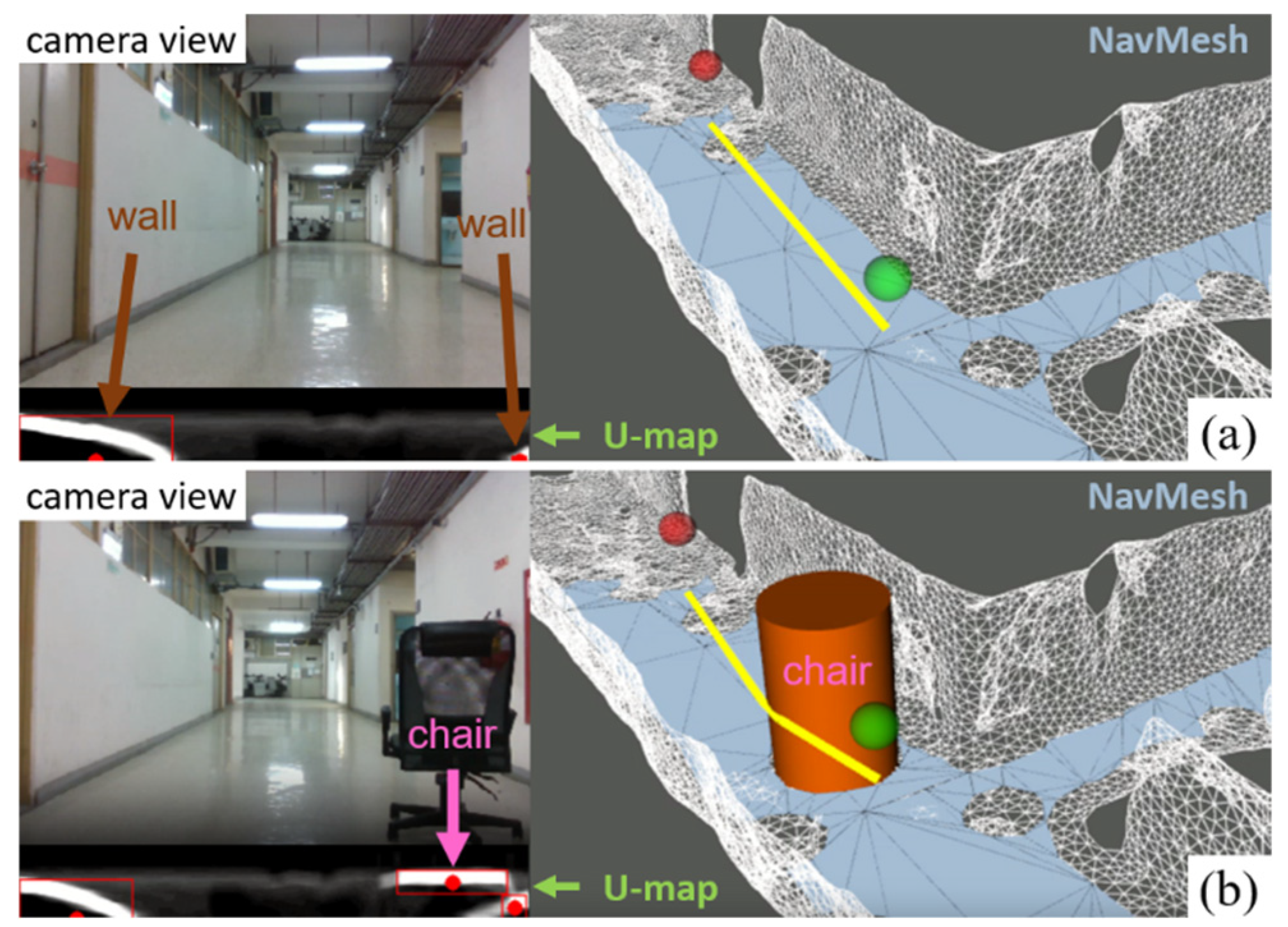
The replanned path bypassing the additional static obstacle. In the original scenario (a), the known corridor is free of obstacles, allowing the robot, shown as the green point, to move directly toward the destination (red point). However, when a previously unknown static obstacle appears in the environment, the robot must update the map to include this new information and adjust its path accordingly. In (b), the algorithm generates a new, collision-free path to avoid the obstacle.
Figure 15.
The replanned path bypassing the additional static obstacle. In the original scenario (a), the known corridor is free of obstacles, allowing the robot, shown as the green point, to move directly toward the destination (red point). However, when a previously unknown static obstacle appears in the environment, the robot must update the map to include this new information and adjust its path accordingly. In (b), the algorithm generates a new, collision-free path to avoid the obstacle.
Figure 16.
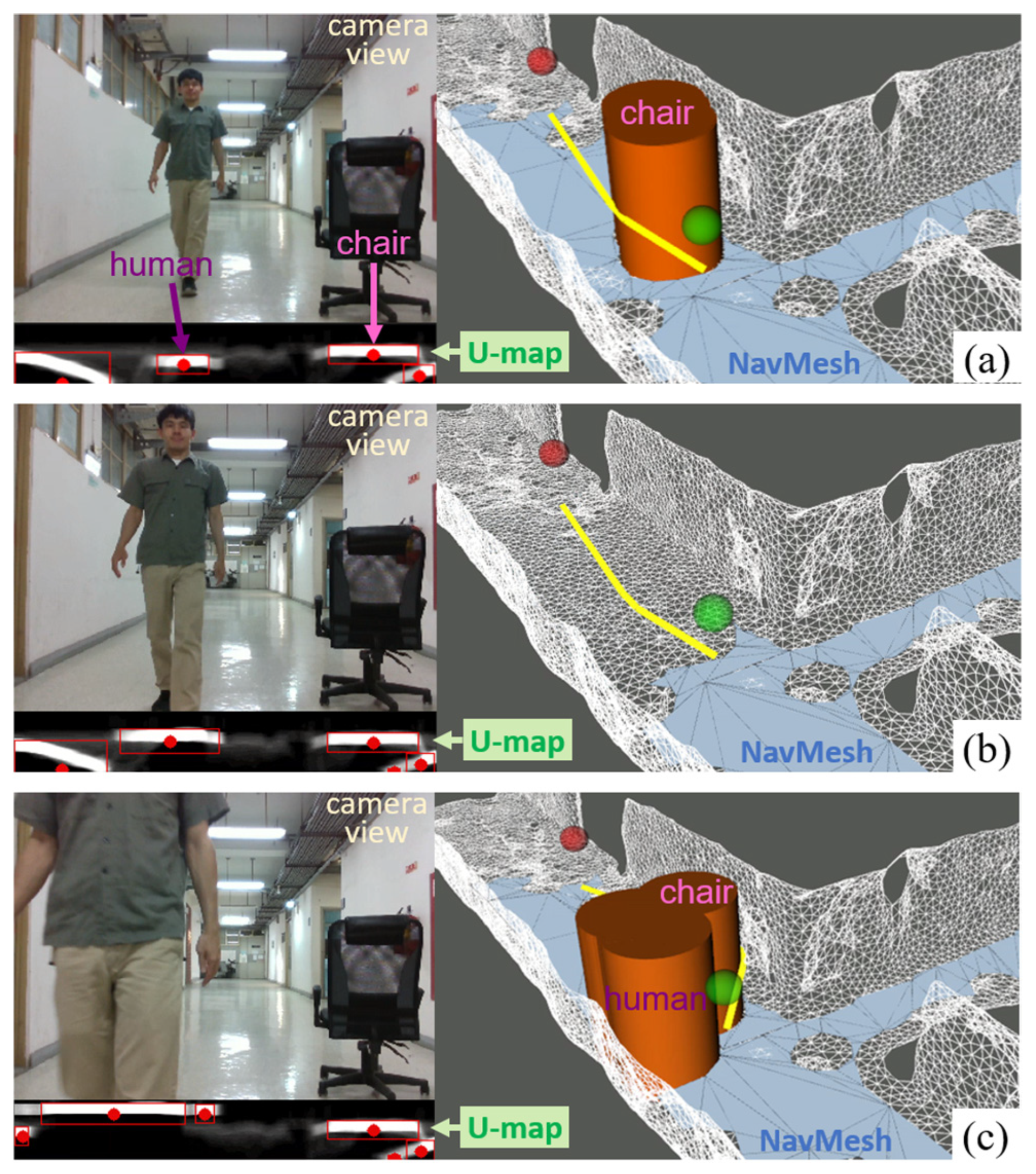
Path replanning for obstacle avoidance. In (a), the robot’s path (yellow) successfully avoids a static obstacle (a chair). However, the appearance of a human pedestrian creates multiple obstacles, resulting in an unfeasible path. This prompts the algorithm to clear the previous obstacle configurations, as shown in (b), and regenerate the NavMesh. Finally, (c) shows the replanned path, taking into account both the robot’s pose (green point) and the presence of static and dynamic obstacles.
Figure 16.
Path replanning for obstacle avoidance. In (a), the robot’s path (yellow) successfully avoids a static obstacle (a chair). However, the appearance of a human pedestrian creates multiple obstacles, resulting in an unfeasible path. This prompts the algorithm to clear the previous obstacle configurations, as shown in (b), and regenerate the NavMesh. Finally, (c) shows the replanned path, taking into account both the robot’s pose (green point) and the presence of static and dynamic obstacles.
Figure 17.
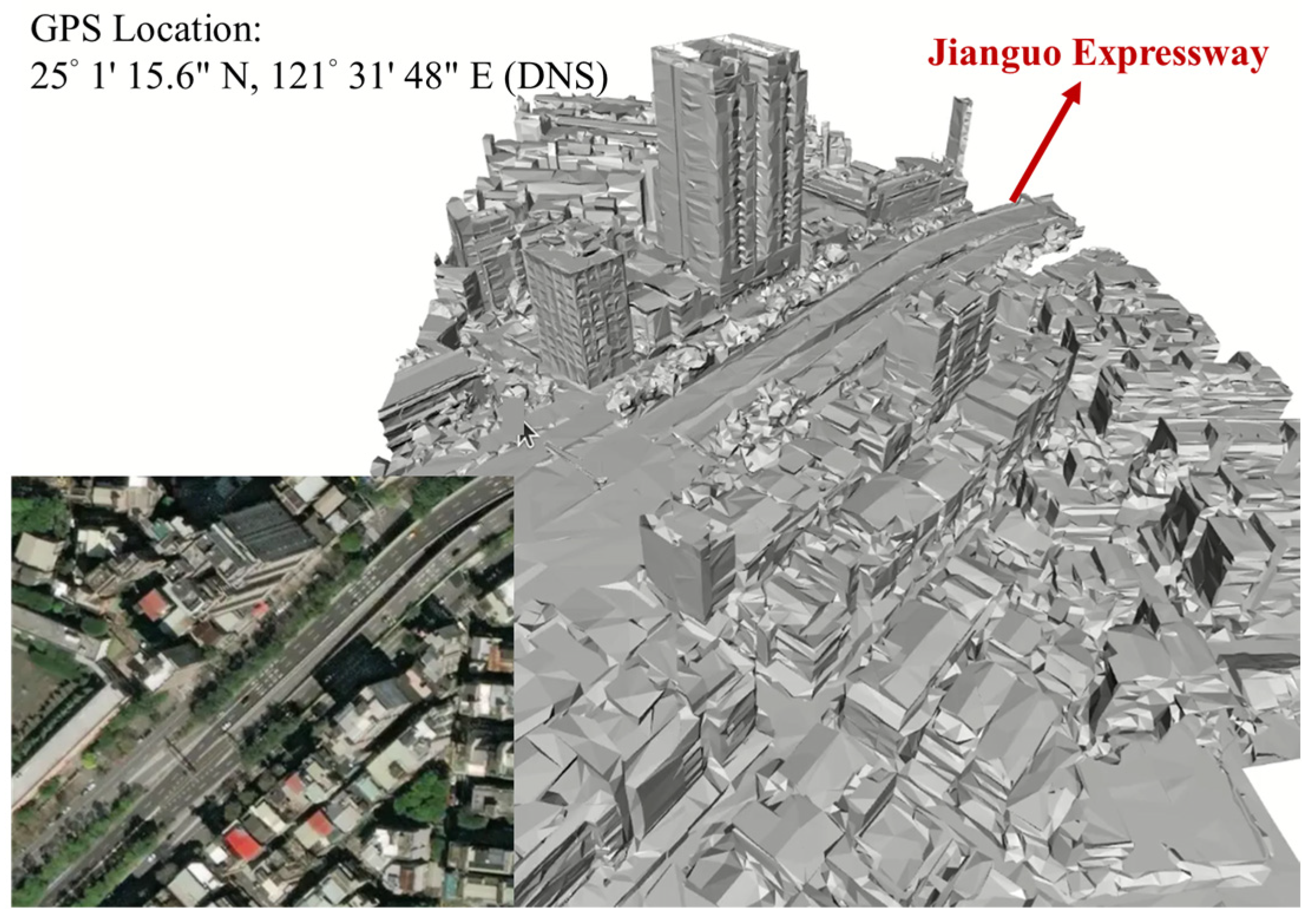
Mesh reconstruction downloaded from Google Maps.
Figure 17.
Mesh reconstruction downloaded from Google Maps.
Figure 18.
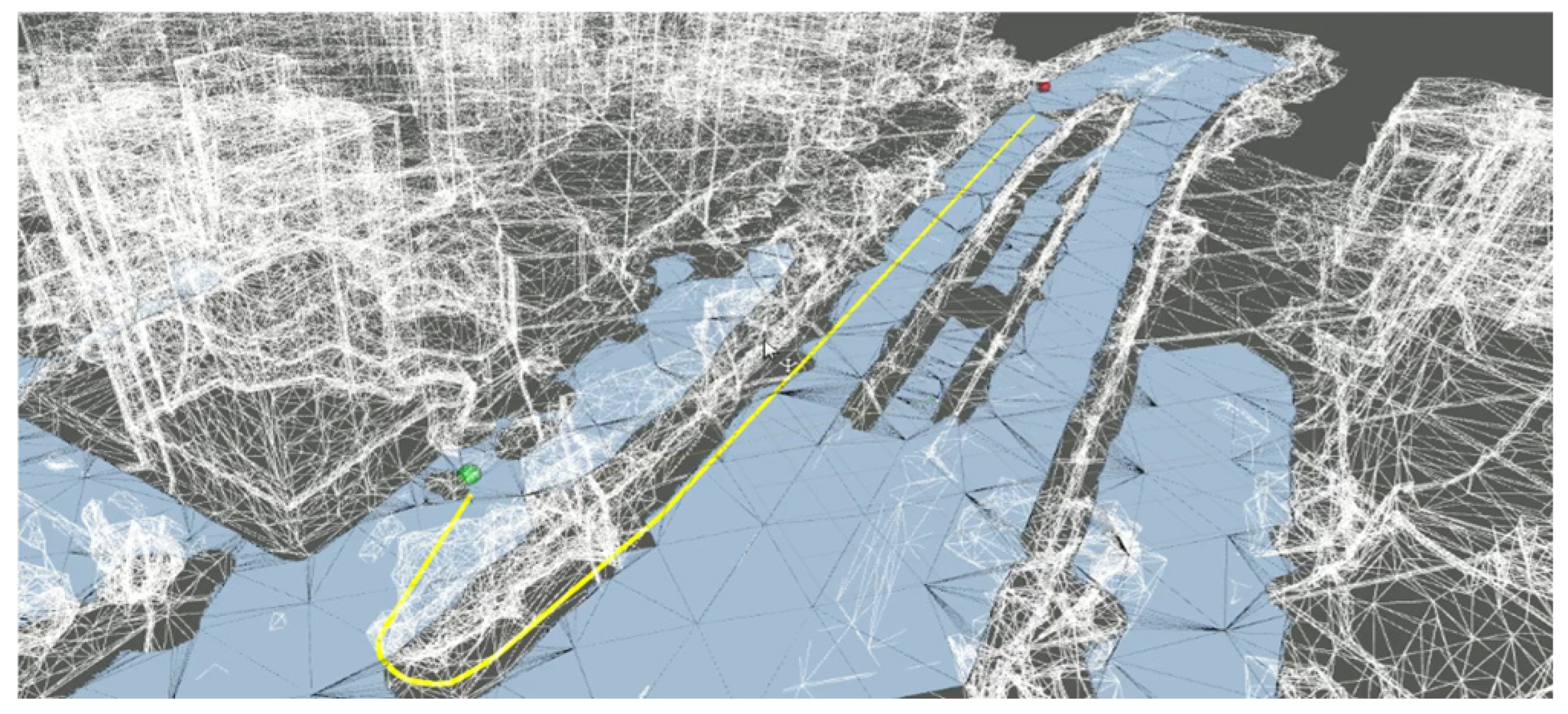
A* pathfinding on a large-scale NavMesh converted from the mesh representation shown.
Figure 18.
A* pathfinding on a large-scale NavMesh converted from the mesh representation shown.
Table 1.
Comparison of different pathfinding algorithms.
Table 1.
Comparison of different pathfinding algorithms.
| Algorithm | Description | Advantages | Disadvantages |
|---|
| A* [9] | Utilizes a heuristic function to guide the search towards the goal. | Guarantees the shortest path; optimal; efficient in grid-based environments. | Computationally expensive; struggles in highly dynamic environments. |
| Dijkstra’s Algorithm [14] | Explores all possible paths by considering the cumulative cost of each edge. | Guarantees the shortest path; effective for weighted graphs. | Computationally intensive for large graphs; inefficient in dynamic environments. |
| Rapidly exploring Random Trees (RRT) [15] | Constructs a tree by randomly sampling the configuration space. | Efficient in high-dimensional and complex environments; handles non-holonomic constraints. | Does not guarantee optimality; paths may be suboptimal and jagged. |
| Probabilistic Roadmap (PRM) [16] | Builds a roadmap by randomly sampling configurations and connecting feasible paths. | Well suited for complex, high-dimensional spaces; precomputed roadmap speeds up queries. | Requires significant preprocessing; roadmap may not be optimal for all scenarios. |
Table 2.
Comparison of SLAMs.
Table 2.
Comparison of SLAMs.
| Method | Sensors | 3D Pose | Loop Closure | Map Type | Localization Performance | CPU Load |
|---|
| Gmapping [6] | 2D LiDAR, Odometry | | | Grid Map | Medium | High |
| LOAM [21] | 3D LiDAR, IMU * | √ | | Pointcloud Map | Good | Medium |
| Cartographer [22] | 2D/3D LiDAR, IMU *, Odometry * | √ | √ | Grid Map | Good | High |
| ORB-SLAM3 [20] | Camera, IMU * | √ | √ | Pointcloud Map | Excellent | High |
Table 3.
APE with SE(3) Umeyama alignment (Unit: m).
Table 3.
APE with SE(3) Umeyama alignment (Unit: m).
| TUM Sequence | ORB-SLAM3 | Ours |
|---|
| Mean | RMSE | Mean ↓ | RMSE ↓ |
|---|
| fr1/desk2 | 0.022605 | 0.025841 | 0.021730 | 0.024884 |
| fr1/rpy | 0.017606 | 0.021268 | 0.017560 | 0.021154 |
| fr2/xyz | 0.014082 | 0.016157 | 0.013793 | 0.015585 |
| fr2/largeloop | 0.250031 | 0.269637 | 0.147816 | 0.164603 |
Table 4.
Comparison of A* pathfinding on different sets of NavMeshes through the wheelchair ramp.
Table 4.
Comparison of A* pathfinding on different sets of NavMeshes through the wheelchair ramp.
| Case | Figure 11a | Figure 11b | Figure 11c |
|---|
| Max length of edges (meters) | 0.8 | 10 | 30 |
| Max error of edges (meters) | 0.1 | 1.0 | 10.0 |
| Time to generate NavMesh (ms) | 422.6 | 402.6 | 383.5 |
| Number of NavMesh polygons | 1139 | 263 | 91 |
| Number of nodes on the path | 12 | 7 | 5 |
| Computation time of finding a path (ms) | 0.87 | 0.18 | 0.10 |
Table 5.
Comparison of A* pathfinding on different sets of NavMeshes on the third floor.
Table 5.
Comparison of A* pathfinding on different sets of NavMeshes on the third floor.
| Case | Figure 12a | Figure 12b | Figure 12c |
|---|
| Max length of edges (meters) | 0.8 | 10 | 30 |
| Max error of edges (meters) | 0.1 | 1.0 | 10.0 |
| Time to generate NavMesh (ms) | 185.9 | 152.0 | 153.3 |
| Number of NavMesh polygons | 705 | 98 | 46 |
| Number of nodes on the path | 25 | 14 | 7 |
| Computation time of finding a path (ms) | 1.24 | 0.24 | 0.14 |














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}