The Impact of Different Parallel Strategies on the Performance of Kriging-Based Efficient Global Optimization Algorithms


Abstract
1. Introduction
2. Materials and Methods
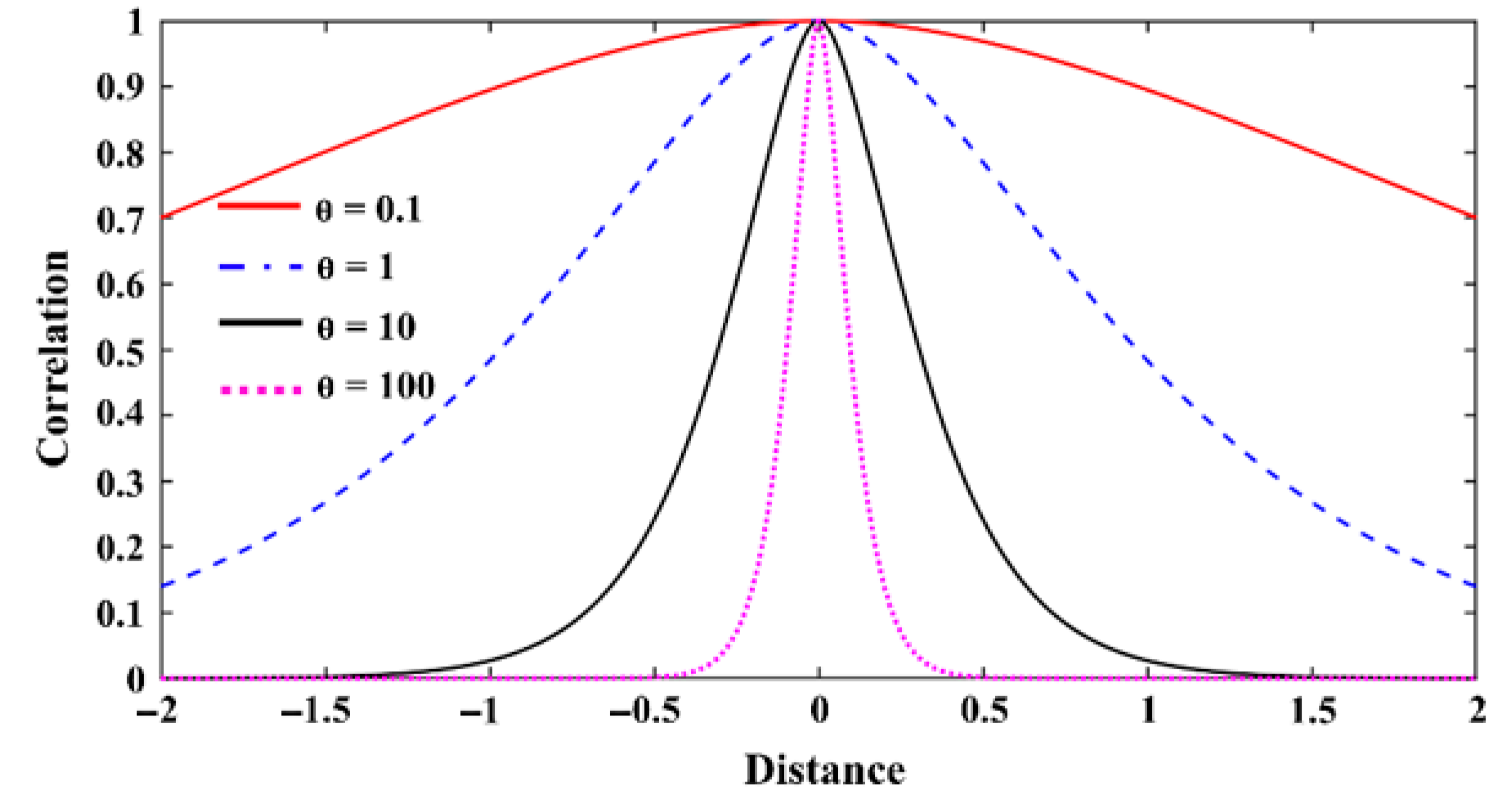
2.1. Ordinary Kriging
2.2. Gradient-Enhanced Kriging
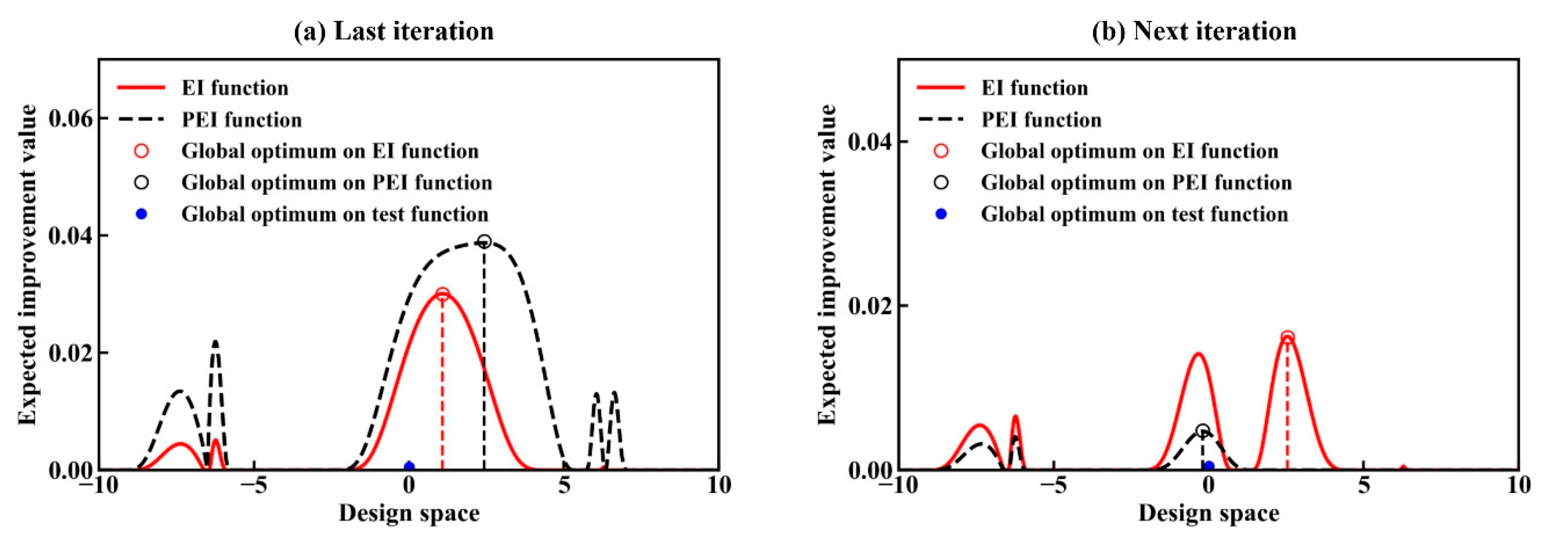
2.3. Expected Improvement Multi-Points Infill Criterion
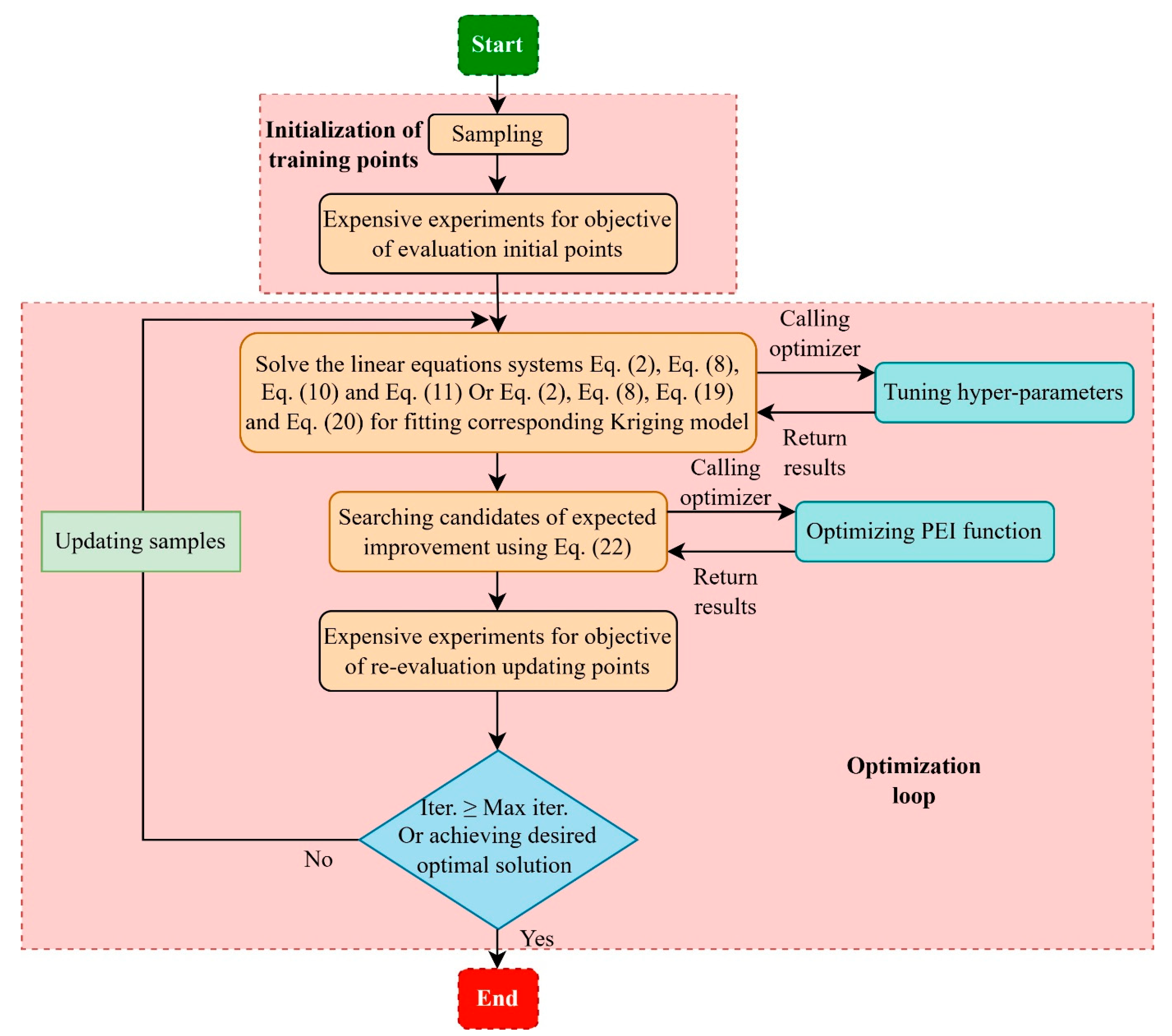
2.4. Kriging-Based Parallel EGO Algorithm System
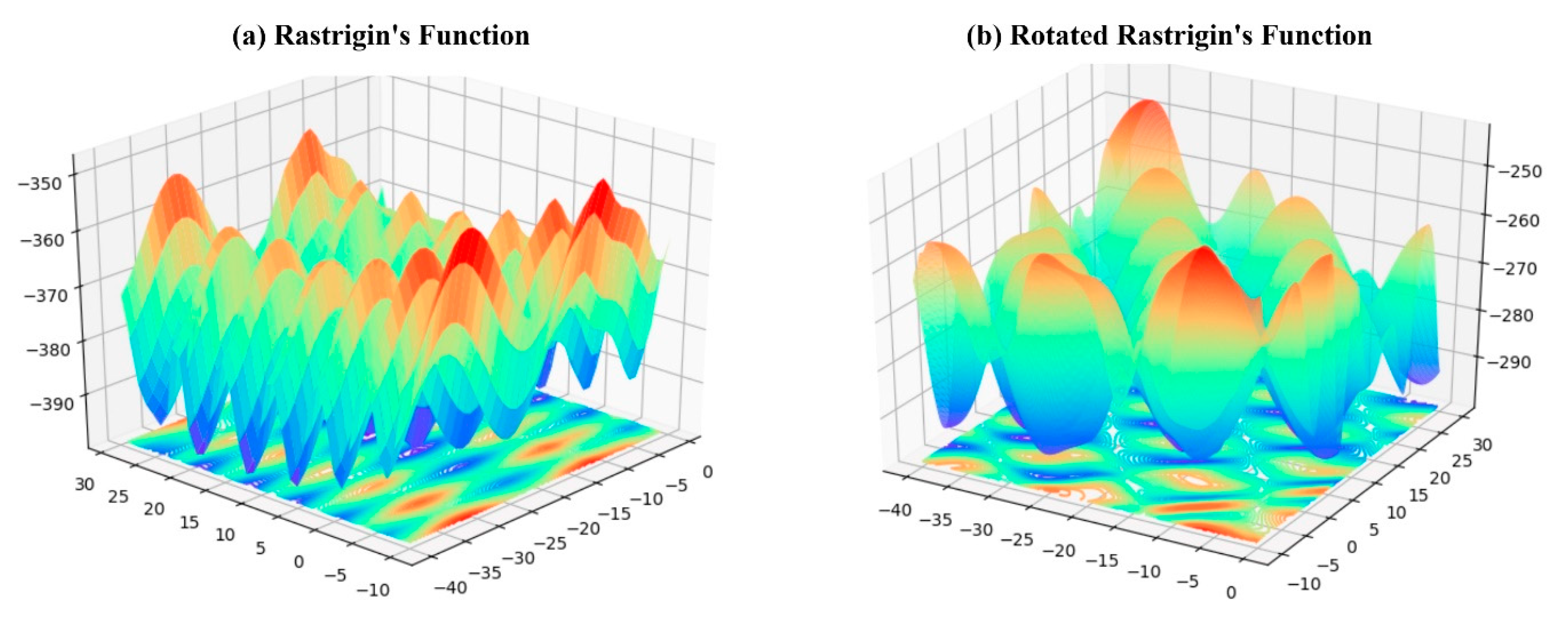
2.5. Materials for Numerical Simulation Tests
- Regression function: regpoly0.
- Correlation function: corrgauss.
- Feasible domain of hyper-parameters: [10−5, 105].
- Optimizer for tuning hyper-parameters: GS-SQP; maximum number of iterations: 1000.
3. Experimental Results and Discussion
3.1. Comparative Analysis of the Optimization Performance of the Parallel EGO Algorithm
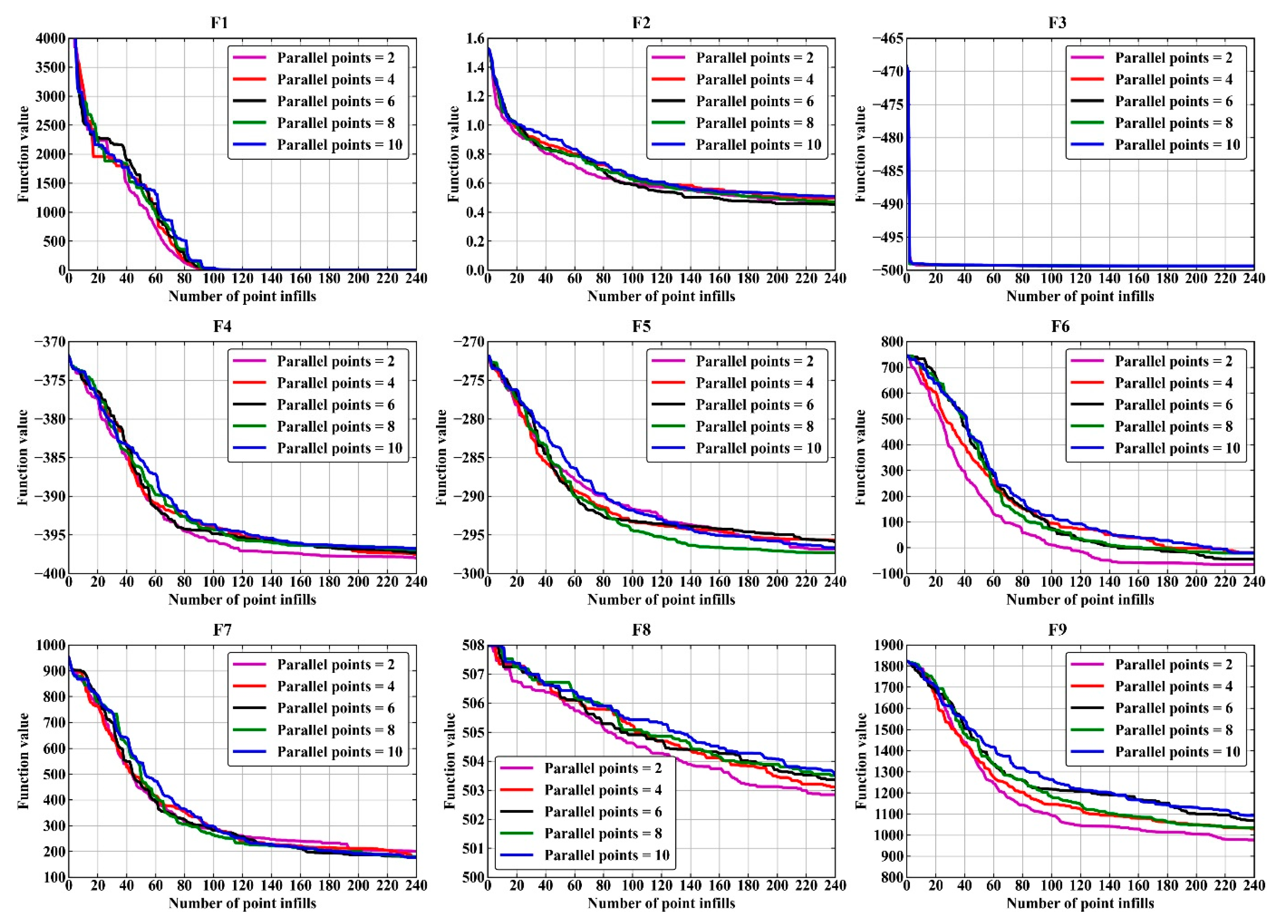
3.1.1. Optimization Solution Accuracy
3.1.2. Convergence Speed of Optimization
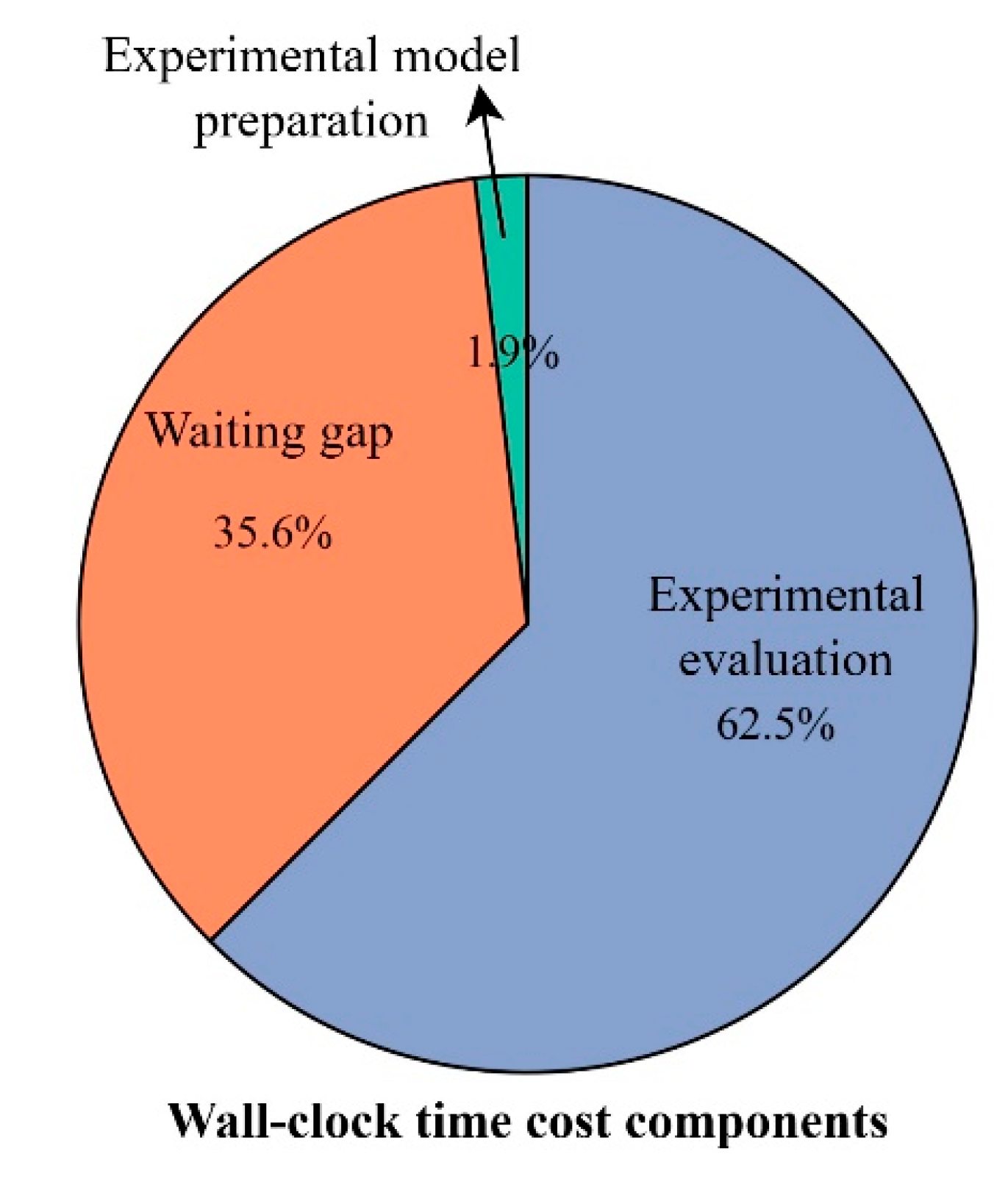
3.2. Comparative Analysis of the Optimization Efficiency of the Parallel EGO Algorithm
3.3. Comparative Analysis of the Optimizing Diversity of the Parallel EGO Algorithm
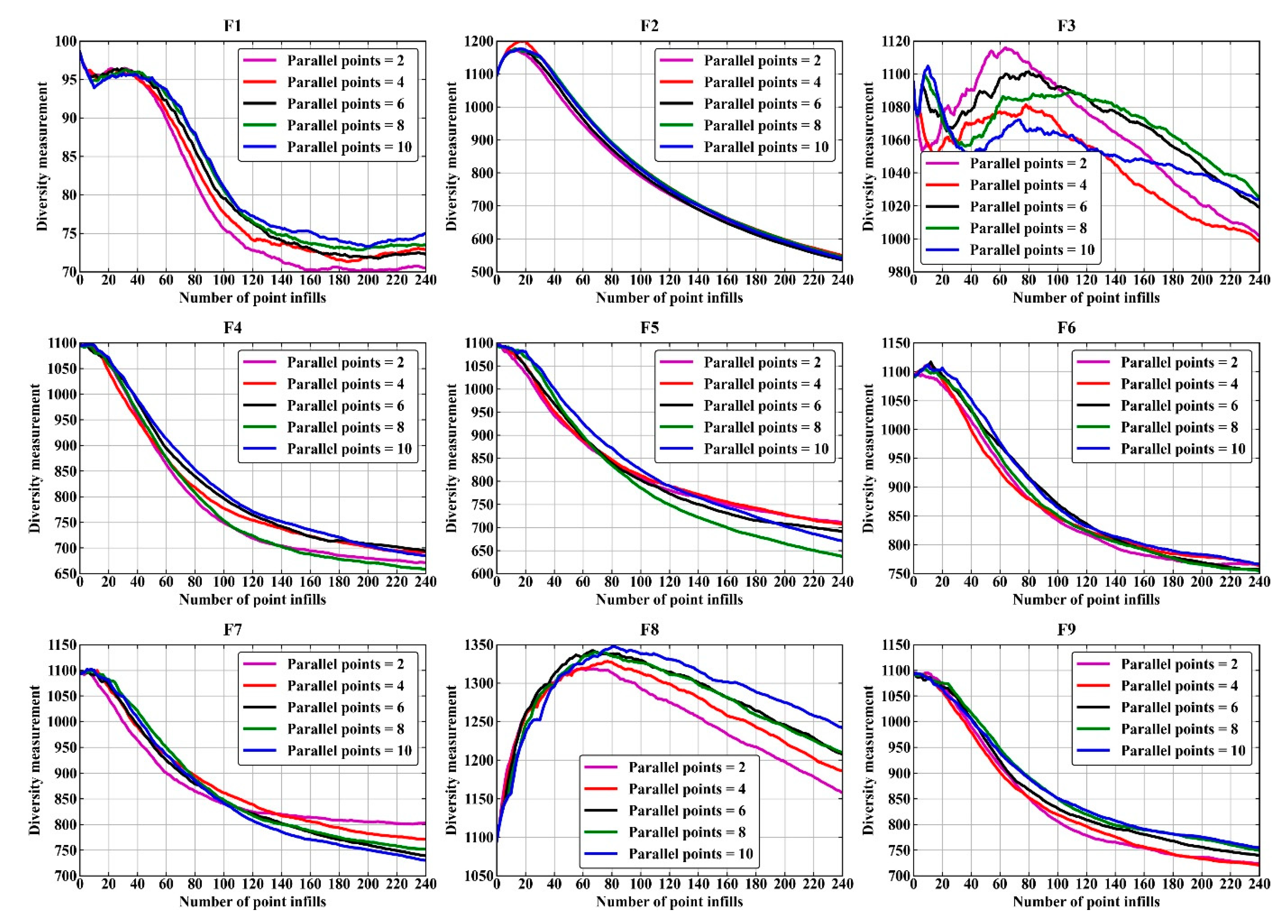
3.3.1. Population Diversity
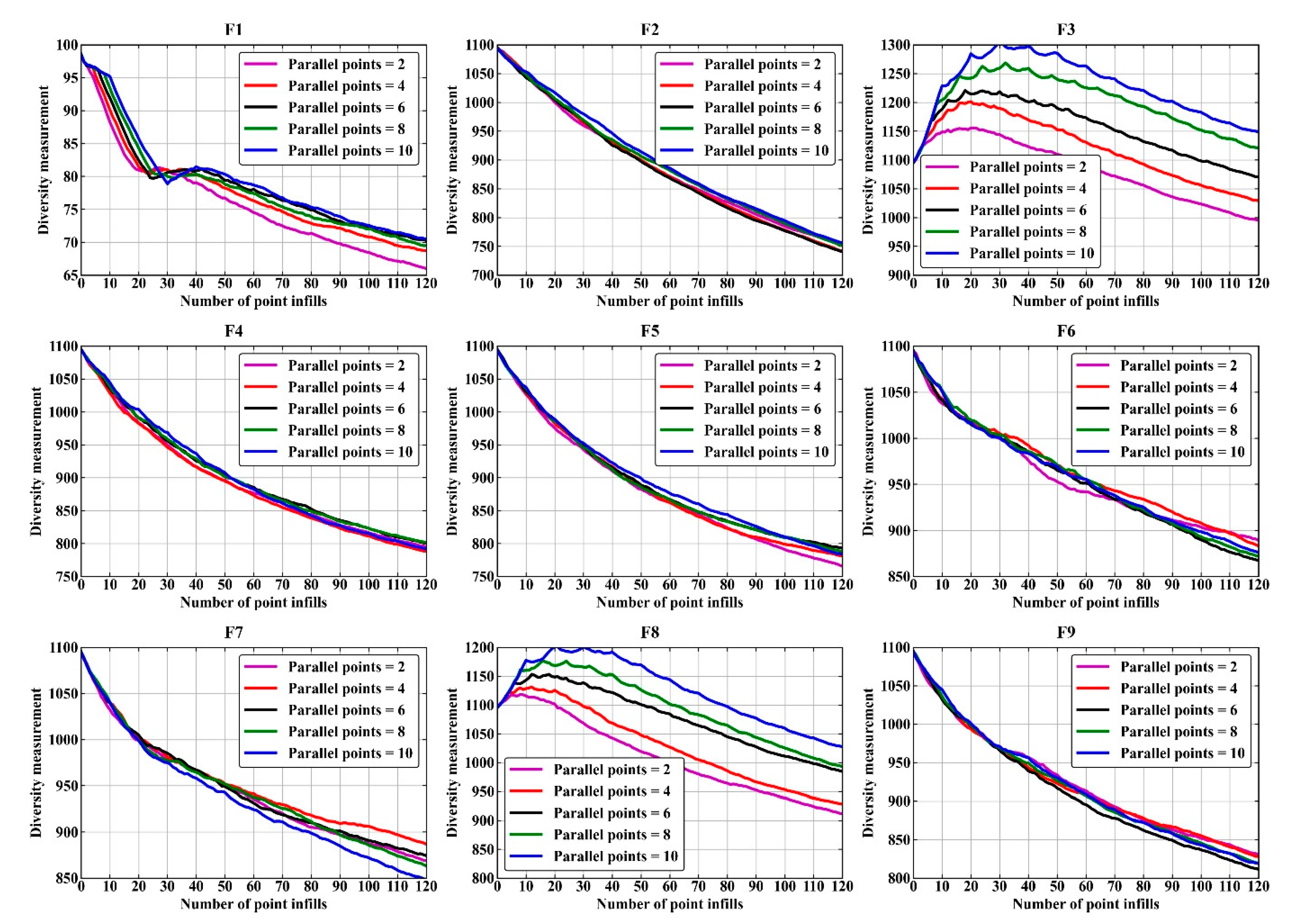
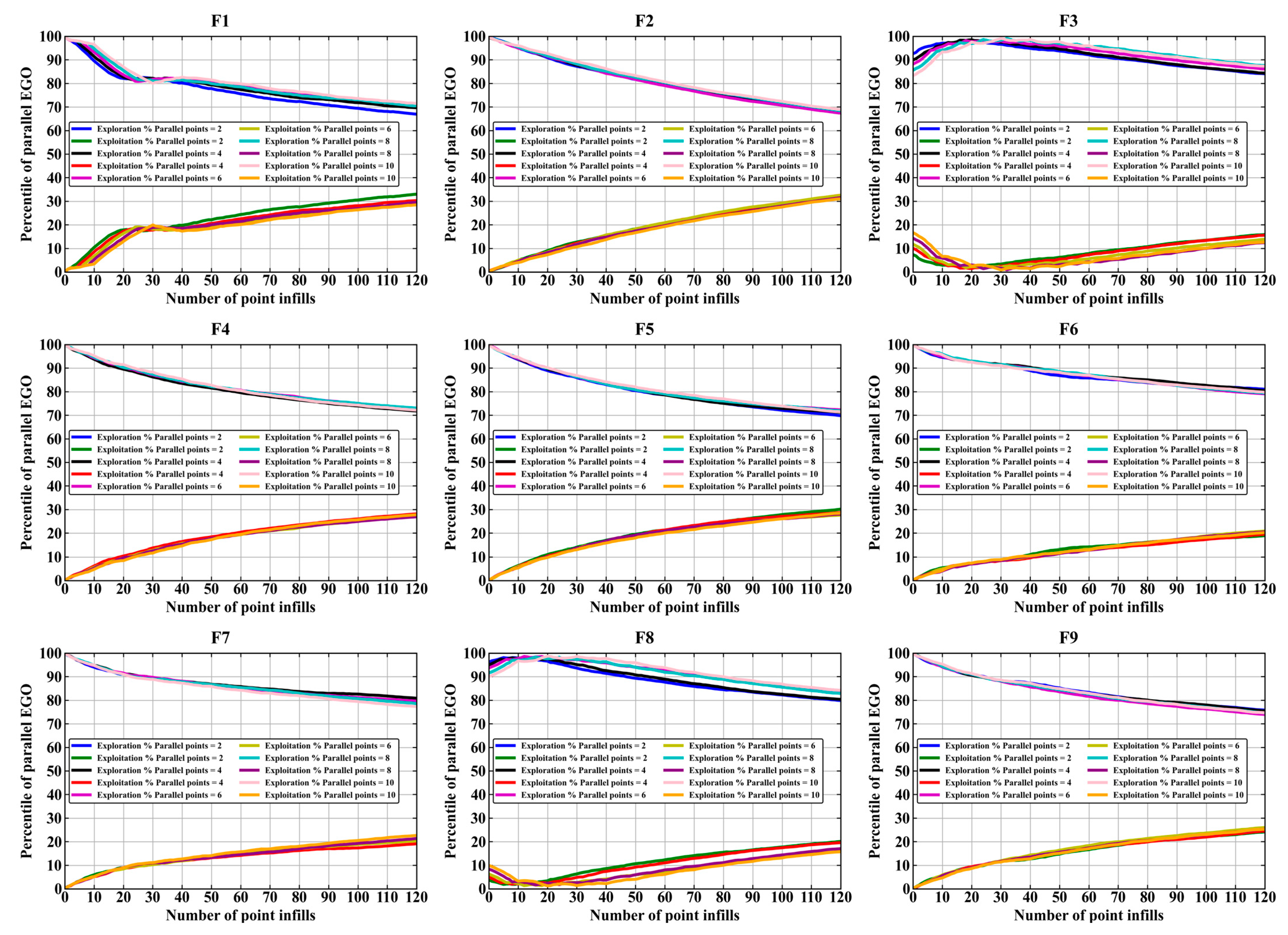
3.3.2. Exploitation and Exploration
4. Conclusions
- (a).
- The impact of different point-filling quantities on the optimization performance of the parallel EGO algorithm based on the OK model is significant. Filling two points per optimization cycle ensures the most stable optimization performance of the parallel EGO algorithm. However, as the number of filled points increases, the stability of the optimization performance gradually declines. In contrast, for the GEK model, the influence of different point-filling quantities on the optimization performance of the parallel EGO algorithm is only noticeable in the early stages of optimization. As the optimization process progresses, the performance differences gradually diminish.
- (b).
- For the parallel EGO algorithm based on the OK model, optimization efficiency improves as the point-filling quantity increases. However, the rate of improvement gradually slows with the increasing number of filled points. In the case of GEK, this slowdown in optimization efficiency becomes even more pronounced.
- (c).
- The point-filling quantity has a significant impact on the optimization diversity of the parallel EGO algorithm based on the OK model. In most cases, filling two points per optimization cycle ensures a reasonable level of optimization diversity and maintains a balance between local exploitation and global exploration. In contrast, for the GEK model, the influence of different point-filling quantities on the diversity of the parallel EGO algorithm is less pronounced.
- (d).
- For practical implementation, it is recommended to employ a smaller number of filling points per optimization cycle during the initial stages when design space information remains relatively limited. However, as iterations progress, gradually increasing the filling quantity may enhance algorithmic convergence speed and improve overall optimization efficiency.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Larson, J.; Menickelly, M.; Wild, S.M. Derivative-Free Optimization Methods. Acta Numer. 2019, 28, 287–404. [Google Scholar] [CrossRef]
- Daoud, M.S.; Shehab, M.; Al-Mimi, H.M.; Abualigah, L.; Zitar, R.A.; Shambour, M.K.Y. Gradient-Based Optimizer (GBO): A Review, Theory, Variants, and Applications. Arch. Comput. Methods Eng. 2023, 30, 2431–2449. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle Swarm Optimization Algorithm: An Overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Vinod Chandra, S.S.; Anand, H.S. Nature Inspired Meta Heuristic Algorithms for Optimization Problems. Computing 2022, 104, 251–269. [Google Scholar] [CrossRef]
- Bhosekar, A.; Ierapetritou, M. Advances in Surrogate Based Modeling, Feasibility Analysis, and Optimization: A Review. Comput. Chem. Eng. 2018, 108, 250–267. [Google Scholar] [CrossRef]
- He, Z.; Xiong, X.; Yang, B.; Li, H. Aerodynamic Optimisation of a High-Speed Train Head Shape Using an Advanced Hybrid Surrogate-Based Nonlinear Model Representation Method. Optim. Eng. 2022, 23, 59–84. [Google Scholar] [CrossRef]
- Liu, B.; Liang, H.; Han, Z.-H.; Yang, G. Surrogate-Based Aerodynamic Shape Optimization of a Sliding Shear Variable Sweep Wing over a Wide Mach-Number Range with Plasma Constraint Relaxation. Struct. Multidiscip. Optim. 2023, 66, 43. [Google Scholar] [CrossRef]
- Li, S.; Trevelyan, J.; Wu, Z.; Lian, H.; Wang, D.; Zhang, W. An Adaptive SVD–Krylov Reduced Order Model for Surrogate Based Structural Shape Optimization through Isogeometric Boundary Element Method. Comput. Methods Appl. Mech. Eng. 2019, 349, 312–338. [Google Scholar] [CrossRef]
- Zhang, L.; Yu, C.; Liu, B. Surrogate-Based Structural Optimization Design of Large-Scale Rectangular Pressure Vessel Using Radial Point Interpolation Method. Int. J. Press. Vessels Pip. 2022, 197, 104638. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Jones, D.R. A Taxonomy of Global Optimization Methods Based on Response Surfaces. J. Glob. Optim. 2001, 21, 345–383. [Google Scholar] [CrossRef]
- Sóbester, A.; Leary, S.J.; Keane, A.J. On the Design of Optimization Strategies Based on Global Response Surface Approximation Models. J. Glob. Optim. 2005, 33, 31–59. [Google Scholar] [CrossRef]
- Kleijnen, J.P.C.; van Beers, W.; van Nieuwenhuyse, I. Expected Improvement in Efficient Global Optimization through Bootstrapped Kriging. J. Glob. Optim. 2012, 54, 59–73. [Google Scholar] [CrossRef]
- Keane, A.J. Statistical Improvement Criteria for Use in Multiobjective Design Optimization. AIAA J. 2006, 44, 879–891. [Google Scholar] [CrossRef]
- Zhan, D.; Cheng, Y.; Liu, J. Expected Improvement Matrix-Based Infill Criteria for Expensive Multiobjective Optimization. IEEE Trans. Evol. Comput. 2017, 21, 956–975. [Google Scholar] [CrossRef]
- Wang, Q.; Nakashima, T.; Lai, C.; Hu, B.; Du, X.; Fu, Z.; Kanehira, T.; Konishi, Y.; Okuizumi, H.; Mutsuda, H. Enhanced Expected Hypervolume Improvement Criterion for Parallel Multi-Objective Optimization. J. Comput. Sci. 2022, 65, 101903. [Google Scholar] [CrossRef]
- Forrester, A.I.J.; Keane, A.J.; Bressloff, N.W. Design and Analysis of “Noisy” Computer Experiments. AIAA J. 2006, 44, 2331–2339. [Google Scholar] [CrossRef]
- Wang, Q.; Nakashima, T.; Lai, C.; Du, X.; Kanehira, T.; Konishi, Y.; Okuizumi, H.; Mutsuda, H. An Improved System for Efficient Shape Optimization of Vehicle Aerodynamics with “Noisy” Computations. Struct. Multidiscip. Optim. 2022, 65, 215. [Google Scholar] [CrossRef]
- Xu, Q.; Wehrle, E.; Baier, H. Adaptive Surrogate-Based Design Optimization with Expected Improvement Used as Infill Criterion. Optimization 2012, 61, 661–684. [Google Scholar] [CrossRef]
- Jiao, R.; Zeng, S.; Li, C.; Jiang, Y.; Jin, Y. A Complete Expected Improvement Criterion for Gaussian Process Assisted Highly Constrained Expensive Optimization. Inf. Sci. 2019, 471, 80–96. [Google Scholar] [CrossRef]
- Qian, J.; Cheng, Y.; Zhang, J.; Liu, J.; Zhan, D. A Parallel Constrained Efficient Global Optimization Algorithm for Expensive Constrained Optimization Problems. Eng. Optim. 2021, 53, 300–320. [Google Scholar] [CrossRef]
- Chen, L.; Qiu, H.; Gao, L.; Jiang, C.; Yang, Z. Optimization of Expensive Black-Box Problems via Gradient-Enhanced Kriging. Comput. Methods Appl. Mech. Eng. 2020, 362, 112861. [Google Scholar] [CrossRef]
- Ginsbourger, D.; Le Riche, R.; Carraro, L. Kriging Is Well-Suited to Parallelize Optimization. In Computational Intelligence in Expensive Optimization Problems; Tenne, Y., Goh, C.-K., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 131–162. [Google Scholar] [CrossRef]
- Zhan, D.; Qian, J.; Cheng, Y. Pseudo Expected Improvement Criterion for Parallel EGO Algorithm. J. Glob. Optim. 2017, 68, 641–662. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; Wu, Y. Kriging-Based Unconstrained Global Optimization through Multi-Point Sampling. Eng. Optim. 2020, 52, 1082–1095. [Google Scholar] [CrossRef]
- Sacks, J.; Welch, W.J.; Mitchell, T.J.; Wynn, H.P. Design and Analysis of Computer Experiments. Stat. Sci. 1989, 4, 409–423. [Google Scholar] [CrossRef]
- Han, Z.-H.; Görtz, S.; Zimmermann, R. Improving Variable-Fidelity Surrogate Modeling via Gradient-Enhanced Kriging and a Generalized Hybrid Bridge Function. Aerosp. Sci. Technol. 2013, 25, 177–189. [Google Scholar] [CrossRef]
- Problem Definitions and Evaluation Criteria for the CEC 2013 Special Session on Real-Parameter Optimization. ResearchGate. Available online: https://www.researchgate.net/publication/256995189_Problem_Definitions_and_Evaluation_Criteria_for_the_CEC_2013_Special_Session_on_Real-Parameter_Optimization (accessed on 20 August 2022).
- Wang, Q.; Nakashima, T.; Lai, C.; Mutsuda, H.; Kanehira, T.; Konishi, Y.; Okuizumi, H. Modified Algorithms for Fast Construction of Optimal Latin-Hypercube Design. IEEE Access 2020, 8, 191644–191658. [Google Scholar] [CrossRef]
- Wang, Q.; Nakashima, T.; Kanehira, T.; Mutsuda, H. A Python Toolbox for Surrogate-Based Optimization. In Proceedings of the 2022 IEEE 12th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 15–17 July 2022; pp. 80–84. [Google Scholar] [CrossRef]
- Fu, H.; Wang, Q.; Nakashima, T. Gradient-Enhanced Kriging-Based Parallel Efficient Global Optimization Algorithm and Its Application in Aerodynamic Shape Optimization. IEEE Access 2025, 13, 73848–73869. [Google Scholar] [CrossRef]
- Zimmerman, D.W.; Zumbo, B.D. Relative Power of the Wilcoxon Test, the Friedman Test, and Repeated-Measures ANOVA on Ranks. J. Exp. Educ. 1993, 62, 75–86. [Google Scholar] [CrossRef]
- Chauhan, D.; Yadav, A. Optimizing the Parameters of Hybrid Active Power Filters through a Comprehensive and Dynamic Multi-Swarm Gravitational Search Algorithm. Eng. Appl. Artif. Intell. 2023, 123, 106469. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Benchmark Test Functions | Design Spaces | Optimum |
|---|---|---|
| 0 | ||
| 0 | ||
| −500 | ||
| −400 | ||
| −300 | ||
| −100 | ||
| 100 | ||
| 500 | ||
| 800 |
| Systems | Test Problems | Metrics | 2 Points | 4 Points | 6 Points | 8 Points | 10 Points |
|---|---|---|---|---|---|---|---|
| OK-based | F1 | Mean | 4.509 × 10−1 | 5.669 × 10−1 | 6.046 × 10−1 | 6.907 × 10−1 | 7.791 × 10−1 |
| Std | 7.865 × 10−1 | 6.880 × 10−1 | 4.560 × 10−1 | 6.826 × 10−1 | 5.662 × 10−1 | ||
| Rank (p = 0.0019) | 2.00 | 3.03 | 3.30 | 3.10 | 3.57 | ||
| GEK-based | Mean | 4.49 × 10−2 | 9.18 × 10−2 | 1.220 × 10−1 | 1.415 × 10−1 | 2.719 × 10−1 | |
| Std | 3.70 × 10−2 | 7.06 × 10−2 | 1.172 × 10−1 | 9.55 × 10−2 | 3.565 × 10−1 | ||
| Rank (p < 0.0001) | 1.87 | 2.57 | 3.03 | 3.53 | 4.00 | ||
| OK-based | F2 | Mean | 4.642 × 10−1 | 4.967 × 10−1 | 4.551 × 10−1 | 4.698 × 10−1 | 5.096 × 10−1 |
| Std | 1.153 × 10−1 | 1.118 × 10−1 | 8.56 × 10−2 | 1.151 × 10−1 | 1.058 × 10−1 | ||
| Rank (p = 0.2998) | 2.97 | 3.20 | 2.57 | 2.87 | 3.40 | ||
| GEK-based | Mean | 5.479 × 10−1 | 5.375 × 10−1 | 5.501 × 10−1 | 5.312 × 10−1 | 5.635 × 10−1 | |
| Std | 1.290 × 10−1 | 1.304 × 10−1 | 1.107 × 10−1 | 1.094 × 10−1 | 1.351 × 10−1 | ||
| Rank (p = 0.3578) | 3.03 | 2.97 | 2.90 | 2.63 | 3.47 | ||
| OK-based | F3 | Mean | −4.9934 × 102 | −4.9936 × 102 | −4.9940 × 102 | −4.9936 × 102 | −4.9938 × 102 |
| Std | 1.858 × 10−1 | 1.998 × 10−1 | 2.199 × 10−1 | 1.658 × 10−1 | 1.921 × 10−1 | ||
| Rank (p = 0.6387) | 3.27 | 3.03 | 2.73 | 3.17 | 2.80 | ||
| GEK-based | Mean | −4.9518 × 102 | −4.9483 × 102 | −4.9400 × 102 | −4.9388 × 102 | −4.9359 × 102 | |
| Std | 1.9765 | 1.7859 | 2.5571 | 2.4633 | 2.2423 | ||
| Rank (p = 0.0316) | 2.43 | 2.60 | 3.20 | 3.20 | 3.57 | ||
| OK-based | F4 | Mean | −3.9797 × 102 | −3.9754 × 102 | −3.9730 × 102 | −3.9694 × 102 | −3.9674 × 102 |
| Std | 8.011 × 10−1 | 1.3583 | 1.6863 | 2.0484 | 1.8026 | ||
| Rank (p = 0.0023) | 2.23 | 2.87 | 2.83 | 3.23 | 3.83 | ||
| GEK-based | Mean | −3.9818 × 102 | −3.9840 × 102 | −3.9817 × 102 | −3.9807 × 102 | −3.9806 × 102 | |
| Std | 8.714 × 10−1 | 8.988 × 10−1 | 1.0087 | 1.0889 | 1.0464 | ||
| Rank (p = 0.0316) | 3.20 | 2.20 | 2.97 | 3.30 | 3.33 | ||
| OK-based | F5 | Mean | −2.9684 × 102 | −2.9566 × 102 | −2.9585 × 102 | −2.9730 × 102 | −2.9666 × 102 |
| Std | 3.7693 | 4.9763 | 4.5262 | 1.3679 | 2.1963 | ||
| Rank (p = 0.2073) | 2.67 | 3.10 | 3.47 | 2.63 | 3.13 | ||
| GEK-based | Mean | −2.9765 × 102 | −2.9735 × 102 | −2.9726 × 102 | −2.9749 × 102 | −2.9765 × 102 | |
| Std | 1.1496 | 1.2659 | 1.3008 | 9.568 × 10−1 | 1.0123 | ||
| Rank (p = 0.3173) | 2.63 | 3.13 | 3.40 | 3.10 | 2.73 | ||
| OK-based | F6 | Mean | −6.444 × 101 | −1.817 × 101 | −4.460 × 101 | −2.078 × 101 | −1.944 × 101 |
| Std | 6.382 × 101 | 1.0328 × 102 | 1.3318 × 102 | 9.513 × 101 | 1.1667 × 102 | ||
| Rank (p = 0.0086) | 2.50 | 3.40 | 2.37 | 3.53 | 3.20 | ||
| GEK-based | Mean | −8.770 × 101 | −9.324 × 101 | −8.852 × 101 | −8.099 × 101 | −9.426 × 101 | |
| Std | 3.885 × 101 | 2.106 × 101 | 2.939 × 101 | 4.975 × 101 | 8.0437 | ||
| Rank (p = 0.6868) | 3.30 | 2.80 | 3.13 | 2.80 | 2.97 | ||
| OK-based | F7 | Mean | 2.0104 × 102 | 1.7902 × 102 | 1.8019 × 102 | 1.7962 × 102 | 1.7694 × 102 |
| Std | 1.4379 × 102 | 1.0624 × 102 | 1.0799 × 102 | 1.0126 × 102 | 1.0803 × 102 | ||
| Rank (p = 0.8136) | 3.13 | 2.73 | 2.97 | 2.97 | 3.20 | ||
| GEK-based | Mean | 1.3460 × 102 | 1.4083 × 102 | 1.3083 × 102 | 1.3919 × 102 | 1.3518 × 102 | |
| Std | 6.349 × 101 | 6.999 × 101 | 5.526 × 101 | 6.968 × 101 | 6.090 × 101 | ||
| Rank (p = 0.9197) | 3.23 | 2.93 | 2.97 | 2.87 | 3.00 | ||
| OK-based | F8 | Mean | 5.0284 × 102 | 5.0311 × 102 | 5.0334 × 102 | 5.0351 × 102 | 5.0351 × 102 |
| Std | 6.669 × 10−1 | 8.299 × 10−1 | 9.720 × 10−1 | 9.606 × 10−1 | 1.3396 | ||
| Rank (p = 0.0047) | 2.17 | 2.57 | 3.40 | 3.37 | 3.50 | ||
| GEK-based | Mean | 5.0500 × 102 | 5.0480 × 102 | 5.0476 × 102 | 5.0566 × 102 | 5.0515 × 102 | |
| Std | 1.7700 | 1.3614 | 1.3429 | 2.0348 | 1.3429 | ||
| Rank (p = 0.6828) | 2.90 | 2.63 | 2.83 | 3.33 | 3.20 | ||
| OK-based | F9 | Mean | 9.7651 × 102 | 1.0291 × 103 | 1.0683 × 103 | 1.0344 × 103 | 1.0929 × 103 |
| Std | 1.6718 × 102 | 1.3887 × 102 | 1.3285 × 102 | 1.5219 × 102 | 1.5950 × 102 | ||
| Rank (p = 0.0071) | 2.20 | 2.83 | 3.47 | 2.97 | 3.53 | ||
| GEK-based | Mean | 9.5022 × 102 | 9.5390 × 102 | 9.6924 × 102 | 9.3789 × 102 | 9.4671 × 102 | |
| Std | 8.041 × 101 | 8.716 × 101 | 1.0428 × 102 | 7.287 × 101 | 8.207 × 101 | ||
| Rank (p = 0.8088) | 2.97 | 3.17 | 3.20 | 2.90 | 2.77 |
| Systems | Test Problems | Stopping Criterions | Number of Cycles | 2 Points | 4 Points | 6 Points | 8 Points | 10 Points |
|---|---|---|---|---|---|---|---|---|
| OK-based | F1 | Expected optimum < 1.0 | Median | 91.00 | 48.00 | 36.50 | 27.50 | 24.00 |
| Mean | 92.77 | 49.33 | 35.00 | 26.83 | 22.23 | |||
| Std | 16.15 | 7.49 | 4.70 | 4.03 | 2.36 | |||
| GEK-based | Median | 15.50 | 11.00 | 7.00 | 6.00 | 5.00 | ||
| Mean | 15.97 | 11.47 | 8.07 | 6.90 | 6.17 | |||
| Std | 4.14 | 4.30 | 2.22 | 1.70 | 1.93 | |||
| OK-based | F2 | Expected optimum < 0.7 | Median | 32.00 | 19.50 | 13.00 | 10.00 | 9.00 |
| Mean | 39.10 | 23.43 | 13.13 | 11.17 | 10.23 | |||
| Std | 29.74 | 16.36 | 7.32 | 6.89 | 5.59 | |||
| GEK-based | Median | 27.50 | 9.50 | 8.00 | 8.00 | 5.50 | ||
| Mean | 26.93 | 13.80 | 10.23 | 8.43 | 7.20 | |||
| Std | 19.17 | 9.35 | 5.78 | 3.47 | 3.19 | |||
| OK-based | F3 | Expected optimum < −490 | Median | 2.00 | 2.00 | 2.00 | 2.00 | 2.00 |
| Mean | 1.93 | 1.93 | 1.93 | 1.93 | 1.93 | |||
| Std | 0.25 | 0.25 | 0.25 | 0.25 | 0.25 | |||
| GEK-based | Median | 8.00 | 6.00 | 6.00 | 7.00 | 4.00 | ||
| Mean | 11.20 | 7.57 | 7.53 | 7.23 | 5.33 | |||
| Std | 10.50 | 5.63 | 5.04 | 4.59 | 3.09 | |||
| OK-based | F4 | Expected optimum < −395 | Median | 36.50 | 23.00 | 14.50 | 15.00 | 14.00 |
| Mean | 40.83 | 29.03 | 19.70 | 16.23 | 14.53 | |||
| Std | 18.88 | 16.17 | 10.81 | 7.59 | 6.32 | |||
| GEK-based | Median | 7.00 | 4.00 | 4.00 | 3.50 | 3.00 | ||
| Mean | 9.60 | 6.50 | 5.17 | 4.63 | 4.20 | |||
| Std | 8.19 | 4.88 | 3.74 | 3.06 | 2.45 | |||
| OK-based | F5 | Expected optimum < −294 | Median | 44.50 | 21.00 | 15.00 | 13.00 | 11.00 |
| Mean | 53.13 | 26.63 | 19.37 | 13.83 | 13.47 | |||
| Std | 29.76 | 16.28 | 11.57 | 5.22 | 5.93 | |||
| GEK-based | Median | 10.00 | 6.50 | 5.00 | 5.00 | 5.00 | ||
| Mean | 13.13 | 8.13 | 5.93 | 5.40 | 4.77 | |||
| Std | 9.96 | 4.81 | 3.44 | 2.33 | 1.76 | |||
| OK-based | F6 | Expected optimum < −50 | Median | 51.50 | 52.50 | 23.00 | 25.00 | 17.00 |
| Mean | 58.50 | 42.60 | 24.17 | 21.20 | 16.90 | |||
| Std | 34.35 | 19.00 | 11.22 | 8.91 | 6.69 | |||
| GEK-based | Median | 6.00 | 4.00 | 4.00 | 3.00 | 3.00 | ||
| Mean | 14.10 | 8.07 | 7.03 | 6.03 | 4.97 | |||
| Std | 14.14 | 7.23 | 5.94 | 4.41 | 2.81 | |||
| OK-based | F7 | Expected optimum < 200 | Median | 59.00 | 28.50 | 22.50 | 17.50 | 13.50 |
| Mean | 69.33 | 36.00 | 24.20 | 19.03 | 15.53 | |||
| Std | 42.81 | 19.93 | 12.49 | 9.89 | 7.33 | |||
| GEK-based | Median | 14.50 | 6.50 | 6.00 | 6.00 | 6.50 | ||
| Mean | 23.80 | 12.60 | 8.90 | 7.27 | 7.03 | |||
| Std | 20.94 | 10.54 | 6.35 | 4.29 | 3.52 | |||
| OK-based | F8 | Expected optimum < 505 | Median | 41.50 | 26.00 | 15.00 | 12.00 | 13.50 |
| Mean | 38.03 | 24.93 | 16.17 | 12.57 | 12.60 | |||
| Std | 25.14 | 18.38 | 11.61 | 8.33 | 8.01 | |||
| GEK-based | Median | 60.00 | 20.00 | 19.00 | 15.00 | 12.00 | ||
| Mean | 42.20 | 17.87 | 14.00 | 11.27 | 9.00 | |||
| Std | 24.33 | 11.43 | 7.73 | 5.66 | 4.34 | |||
| OK-based | F9 | Expected optimum < 1100 | Median | 50.00 | 27.50 | 40.00 | 16.50 | 21.00 |
| Mean | 61.43 | 35.20 | 29.83 | 19.00 | 18.07 | |||
| Std | 39.14 | 20.69 | 12.97 | 9.44 | 6.84 | |||
| GEK-based | Median | 5.00 | 4.00 | 3.50 | 3.00 | 3.00 | ||
| Mean | 14.27 | 8.27 | 7.27 | 5.53 | 4.70 | |||
| Std | 17.96 | 9.17 | 6.68 | 4.18 | 2.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, H.; Wang, Q.; Nakashima, T.; Bale, R.; Tsubokura, M. The Impact of Different Parallel Strategies on the Performance of Kriging-Based Efficient Global Optimization Algorithms. Appl. Sci. 2025, 15, 8465. https://doi.org/10.3390/app15158465
Fu H, Wang Q, Nakashima T, Bale R, Tsubokura M. The Impact of Different Parallel Strategies on the Performance of Kriging-Based Efficient Global Optimization Algorithms. Applied Sciences. 2025; 15(15):8465. https://doi.org/10.3390/app15158465
Chicago/Turabian StyleFu, Hang, Qingyu Wang, Takuji Nakashima, Rahul Bale, and Makoto Tsubokura. 2025. "The Impact of Different Parallel Strategies on the Performance of Kriging-Based Efficient Global Optimization Algorithms" Applied Sciences 15, no. 15: 8465. https://doi.org/10.3390/app15158465
APA StyleFu, H., Wang, Q., Nakashima, T., Bale, R., & Tsubokura, M. (2025). The Impact of Different Parallel Strategies on the Performance of Kriging-Based Efficient Global Optimization Algorithms. Applied Sciences, 15(15), 8465. https://doi.org/10.3390/app15158465