
Load Prediction Control Study of a Pitch Control System for Large Offshore Wind Turbines

 and
and
Abstract
1. Introduction
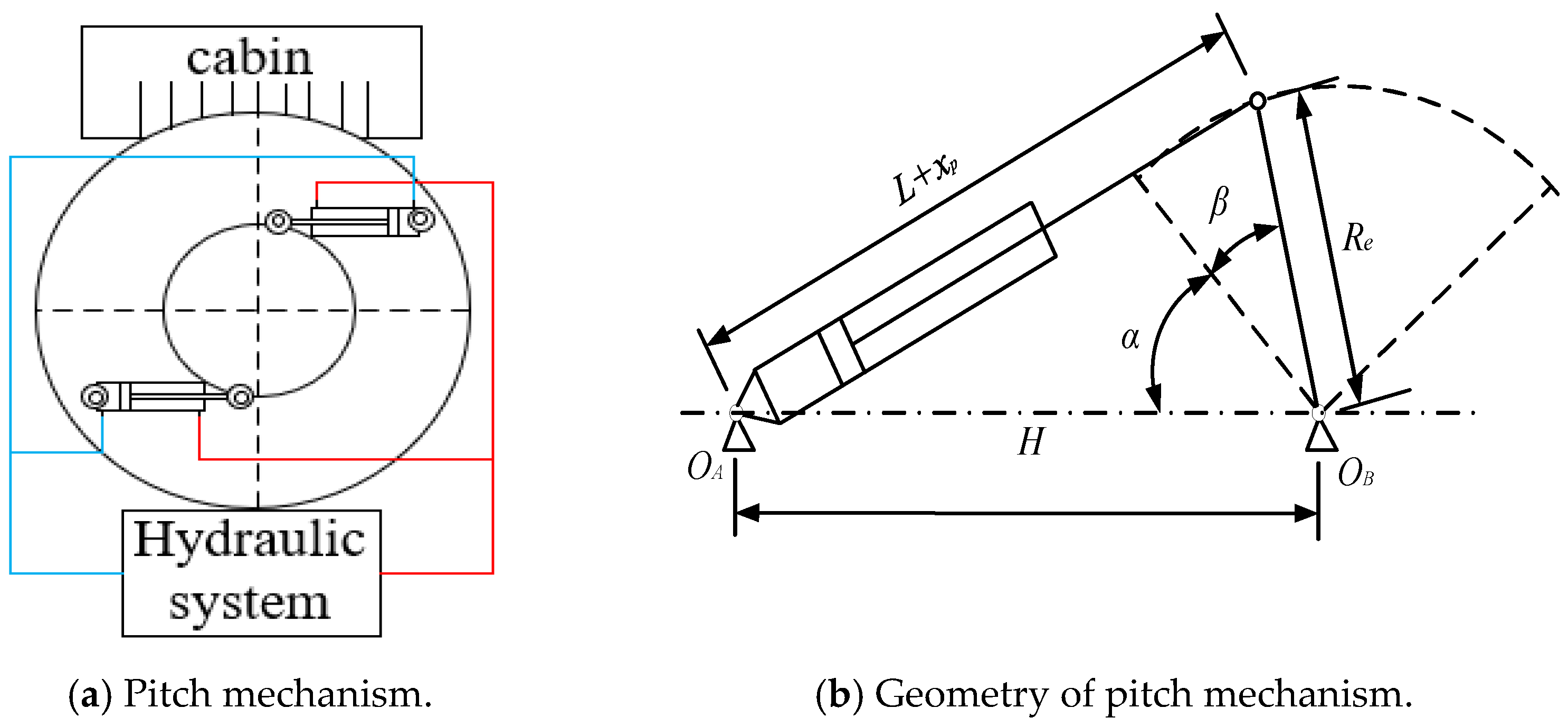
2. Pitch System Principles and Modeling
3. Load Disturbance Compensation Model
4. Experimental and Simulation Results
4.1. Simulation
4.2. Experimentation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviation
| LDC | load disturbance compensation |
References
- Guo, Y.; Wang, H.; Lian, J. Review of integrated installation technologies for offshore wind turbines: Current progress and future development trends. Energy Convers. Manag. 2022, 255, 115319. [Google Scholar] [CrossRef]
- Narayanan, V.L.; Dhaked, D.K.; Sitharthan, R. Improved machine learning-based pitch controller for rated power generation in large-scale wind turbine. Renew. Energy Focus 2024, 50, 100603. [Google Scholar] [CrossRef]
- Fitzgerald, B.; Sarkar, S. Observer based pitch control for load mitigation and power regulation of floating offshore wind turbines. J. Phys. Conf. Ser. 2024, 2647, 032003. [Google Scholar] [CrossRef]
- Deng, W.; Gao, Y.; Chen, H.; Sun, Y.; Zhang, L. Analysis of Various Aggregation Boost Topologies for DC Offshore Wind Power. In Proceedings of the 2024 6th Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 28–31 March 2024; pp. 1114–1120. [Google Scholar]
- Su, X.; Wang, X.; Xu, W.; Yuan, L.; Xiong, C.; Chen, J. Offshore wind power: Progress of the edge tool, which can promote sustainable energy development. Sustainability 2024, 16, 7810. [Google Scholar] [CrossRef]
- Li, S.; Du, M.; Li, Y.; He, J.; Ma, F.; Chen, Q. Independent Pitch Controller based on Fuzzy Adaptive Tuning PI for Load Mitigation of Large Land Wind Turbine. J. Phys. Conf. Ser. 2023, 2655, 012007. [Google Scholar] [CrossRef]
- Fayazi, A.; Ghayoumi Zadeh, H.; Ahmadian, H.; Ghane, M.; Seryasat, O.R. Pitch Actuator Fault-Tolerant Control of Wind Turbines via an L 1 Adaptive Sliding Mode Control (SMC) Scheme. Energies 2024, 17, 3963. [Google Scholar] [CrossRef]
- Pan, L.; Xiong, Y.; Zhu, Z.; Wang, L. Research on variable pitch control strategy of direct-driven offshore wind turbine using KELM wind speed soft sensor. Renew. Energy 2022, 184, 1002–1017. [Google Scholar] [CrossRef]
- Wang, S.; Wang, B.; Shen, W. Research on H∞ Robust Control Strategy of Wind Turbine Hydraulic Variable Pitch System. IOP Conf. Ser. Earth Environ. Sci. 2021, 696, 012053. [Google Scholar] [CrossRef]
- Ai, S.; Su, J.; Meng, W.; Yan, Y. Integrated control of blade pitch and generator speed for floating wind turbines. Ocean. Eng. 2024, 300, 117080. [Google Scholar] [CrossRef]
- Zhang, T.; Yu, B.; Wang, X.; Liu, Y.; Chen, G.; Liu, K.; Ai, C.; Wang, L. Adaptive Robust Control for Pump-Controlled Pitch Systems Facing Wind Speed and System Parameter Variability. Appl. Sci. 2024, 14, 10218. [Google Scholar] [CrossRef]
- Zhang, T.; Yu, H.; Yu, B.; Ai, C.; Lou, X.; Xiang, P.; Li, R.; Li, J. Electro-Hydraulic Servo-Pumped Active Disturbance Rejection Control in Wind Turbines for Enhanced Safety and Accuracy. Processes 2024, 12, 908. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.; An, Z.; Liu, R. An energy-efficient adaptive speed-regulating method for pump-controlled motor hydrostatic drive powertrains. Processes 2023, 12, 25. [Google Scholar] [CrossRef]
- Zhang, T.; Yan, G.; Liu, X.; Yao, C.; Ai, C. Nonlinear flow modeling of electro hydrostatic pump unit based on Gauss Newton iterative method for high performance control. Sci. Rep. 2024, 14, 21750. [Google Scholar] [CrossRef]
- Zhao, L.; Gong, Y.; Li, Z.; Wang, J.; Xue, L.; Xue, Y. Rapid Estimation Model for Wake Disturbances in Offshore Floating Wind Turbines. J. Mar. Sci. Eng. 2024, 12, 647. [Google Scholar] [CrossRef]
- Yang, W.; Han, Y.; Ma, R.; Hou, M.; Yang, G. A composite super-twisting sliding mode approach for platform motion suppression and power regulation of floating offshore wind turbine. J. Mar. Sci. Eng. 2023, 11, 2318. [Google Scholar] [CrossRef]
- Cui, L.; Aleem, M.; Shivashankar; Bhattacharya, S. Soil–structure interactions for the stability of offshore wind foundations under varying weather conditions. J. Mar. Sci. Eng. 2023, 11, 1222. [Google Scholar] [CrossRef]
- Henry, A.; Pusch, M.; Pao, L. Investigation of H∞-Tuned Individual Pitch Control for Wind Turbines. Wind Energy 2024, 27, 1074–1094. [Google Scholar] [CrossRef]
- Hlaing, N.; Morato, P.G.; Santos, F.d.N.; Weijtjens, W.; Devriendt, C.; Rigo, P. Farm-wide virtual load monitoring for offshore wind structures via Bayesian neural networks. Struct. Health Monit. 2024, 23, 1641–1663. [Google Scholar] [CrossRef]
- Kim, D.; Ryu, G.; Moon, C.; Kim, B. Accuracy of a short-term wind power forecasting model based on deep learning using LiDAR-SCADA integration: A case study of the 400-MW Anholt offshore wind farm. Appl. Energy 2024, 373, 123882. [Google Scholar] [CrossRef]
- Bai, D.; Wang, B.; Li, Y.; Wang, W. Study on load reduction and vibration control strategies for semi-submersible offshore wind turbines. Sci. Rep. 2025, 15, 1148. [Google Scholar] [CrossRef]
- Tohamy, Y.E.; Giger, U.; Marten, D.; Schulte, H. Multi-Rotor Wind Turbine Control: Strategies for Pitch Replacement and Mechanical Load Mitigation. J. Phys. Conf. Ser. 2024, 2767, 032015. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; Liu, Y.; Wang, X.; Bai, W.; Cao, T. Improved control strategy and designed control parameters of pitch system for wind turbine considering blade load reduction. Renew. Energy 2024, 232, 121050. [Google Scholar] [CrossRef]
- Kipchirchir, E.; Söffker, D. IPC-based robust disturbance accommodating control for load mitigation and speed regulation of wind turbines. Wind Energy 2024, 27, 382–402. [Google Scholar] [CrossRef]
- Xiao, Y.; Wang, X.; Sun, X.; Zhong, X.; Peng, C.; Dai, L.; Maeda, T.; Cai, C.; Li, Q.a. Load reduction and mechanism analysis of cyclic pitch regulation on wind turbine blades under yaw conditions. Ocean. Eng. 2025, 321, 120361. [Google Scholar] [CrossRef]
- Yao, Y.; Huang, S.; Wang, K.; Zhao, M.; Liu, H. Study on the aeroelastic response of wind turbine blades with pitch system failure and strategies for typhoon resistance. Ocean. Eng. 2025, 324, 120734. [Google Scholar] [CrossRef]
- Hu, X.; Wang, Q.; Jiang, T.; Zhan, S. Adaptive Fault-tolerant Pitch Control of Wind Turbines. In Proceedings of the 35th Chinese Control and Decision Conference (CCDC), Yichang, China, 20–22 May 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 5144–5149. [Google Scholar]
- Hu, H.; Peng, L.; Li, X.; Chen, Y.; Yan, J.; Guo, P.; Cheng, B. A New L1 Neural Network Adaptive Wind Turbine Pitch Control Strategy. J. Circuits Syst. Comput. 2025, 34, 2550020. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Wang, X. Independent Pitch Adaptive Control of Large Wind Turbines Using State Feedback and Disturbance Accommodating Control. Energies 2024, 17, 4619. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Parameter Name | Value |
|---|---|---|
| 1 | Max system pressure | 35 MPa |
| 2 | Rated system pressure | 26 MPa |
| 3 | Cylinder structure parameters | 200-140-800 mm |
| 4 | Hydraulic pump displacement | 80 mL/r |
| 5 | Rated motor speed | 1800 r/min |
| 6 | Max motor speed | 2700 r/min |
| 7 | Servo motor moment of inertia | 6.073·10−2 kg·m2 |
| 8 | Hydraulic pump moment of inertia | 6.05·10−2 kg·m2 |
| Instruction Signal | Parameter | PID Control | LDC Control |
|---|---|---|---|
| Step signal (100–700 mm) | Settling time | 14.4 s | 13.8 s |
| Sinusoidal signal (50 mm, 0.05 HZ) | Maximum tracking error | 12.66 mm | 2.42 mm |
| Displacement variance | 41.5 | 2.02 |
| Component Name | Model | Manufacturer |
|---|---|---|
| Accumulator | NXQ-AB-25 | Liming (Zhoushan, China) |
| Check Valve | S20P21B | Huade (Beijing, China) |
| Relief Valve | RDFALWN | SUN (Houston, TX, USA) |
| Reversing Valve | DFEBMCN-224 | SUN |
| Throttle Valve | NFDDLGN | SUN |
| Temperature Sensor | PH4000 | Zhuhong (Wuxi, China) |
| Pressure Sensors | PH3600 | Zhuhong |
| Displacement Sensor | SSI Displacement Sensors | Xiju (Nanjing, China) |
| Instruction Signal | Parameter | PID Control | LDC Control |
|---|---|---|---|
| Step signal (800 mm) | Settling time | 18.2 s | 17.4 s |
| Continuous step signal (100–800 mm) | Average settling time | 4.97 s | 4.38 s |
| Sinusoidal signal (50 mm, 0.05–0.08 HZ) | Maximum tracking error | 12.66 mm | 2.42 mm |
| Displacement variance | 43.18 | 2.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Liu, S.; Chen, J.; Kong, X.; Ai, C.; Chen, G. Load Prediction Control Study of a Pitch Control System for Large Offshore Wind Turbines. Appl. Sci. 2025, 15, 6468. https://doi.org/10.3390/app15126468
Wang X, Liu S, Chen J, Kong X, Ai C, Chen G. Load Prediction Control Study of a Pitch Control System for Large Offshore Wind Turbines. Applied Sciences. 2025; 15(12):6468. https://doi.org/10.3390/app15126468
Chicago/Turabian StyleWang, Xuewei, Shibo Liu, Jianghui Chen, Xiangdong Kong, Chao Ai, and Gexin Chen. 2025. "Load Prediction Control Study of a Pitch Control System for Large Offshore Wind Turbines" Applied Sciences 15, no. 12: 6468. https://doi.org/10.3390/app15126468
APA StyleWang, X., Liu, S., Chen, J., Kong, X., Ai, C., & Chen, G. (2025). Load Prediction Control Study of a Pitch Control System for Large Offshore Wind Turbines. Applied Sciences, 15(12), 6468. https://doi.org/10.3390/app15126468