
Event-Triggered Active Fault-Tolerant Predictive Control for Networked Multi-Agent Systems with Actuator Faults and Random Communication Constraints



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Control Scheme Design
3. Stability Analysis
4. Simulation Results
- (1)
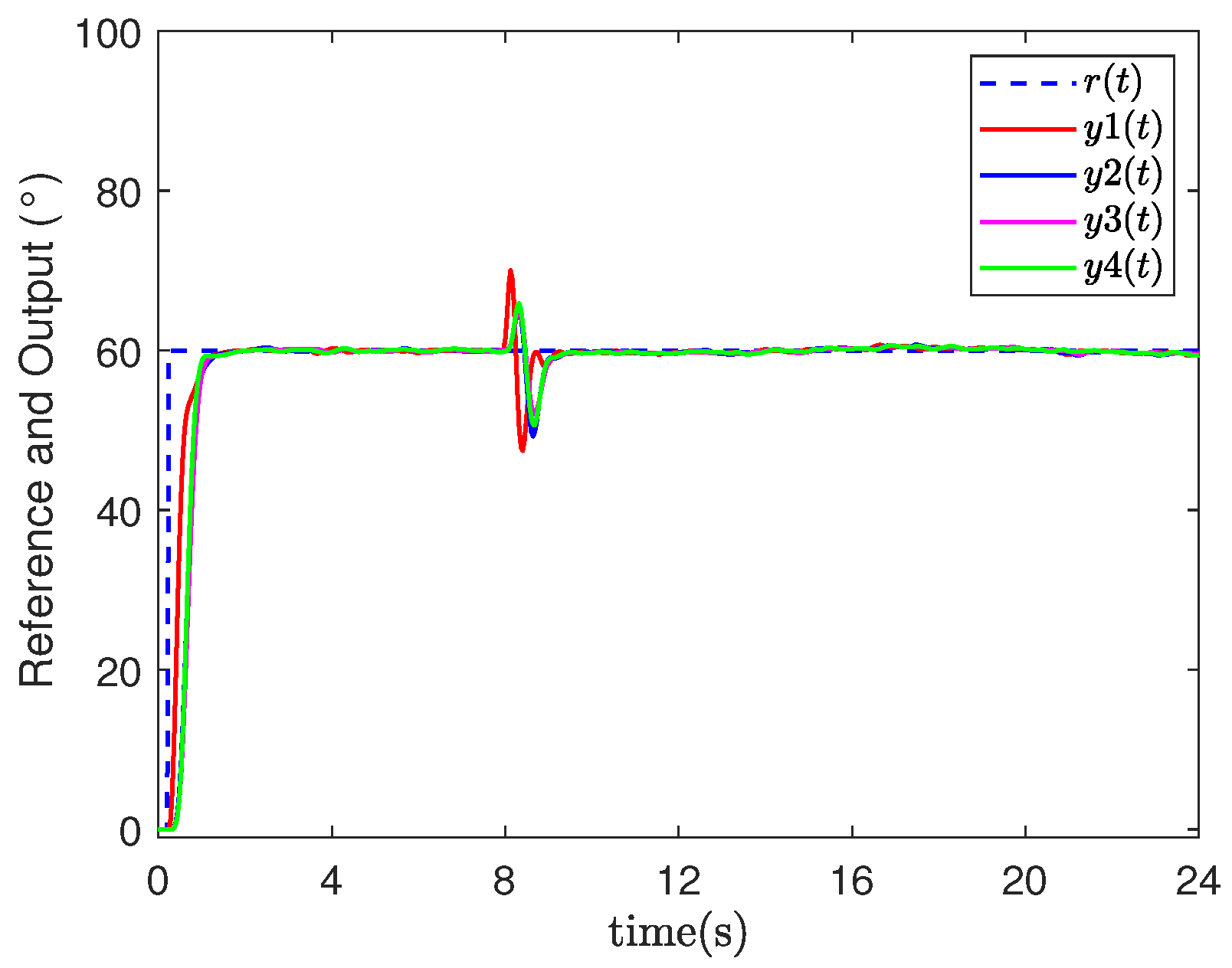
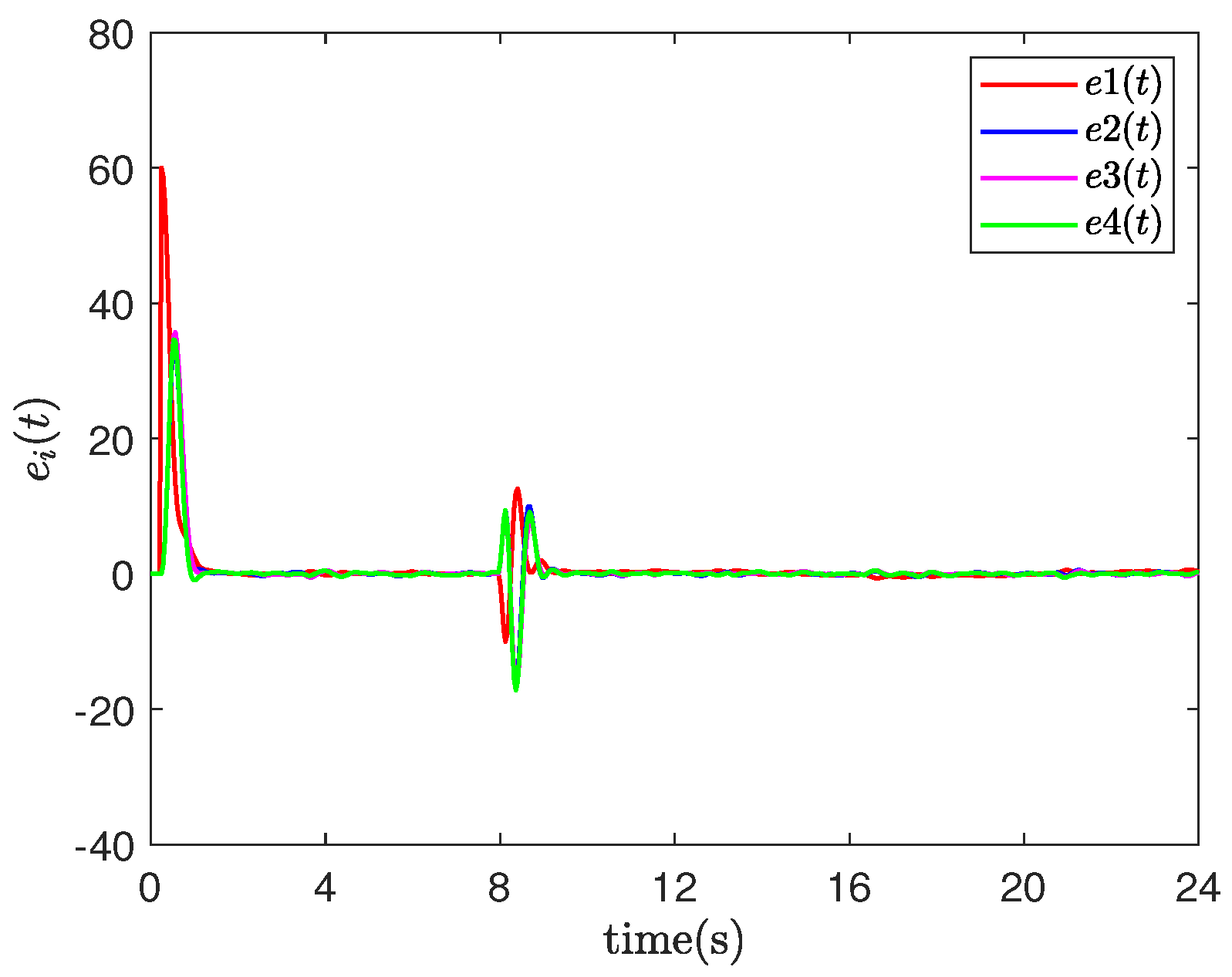
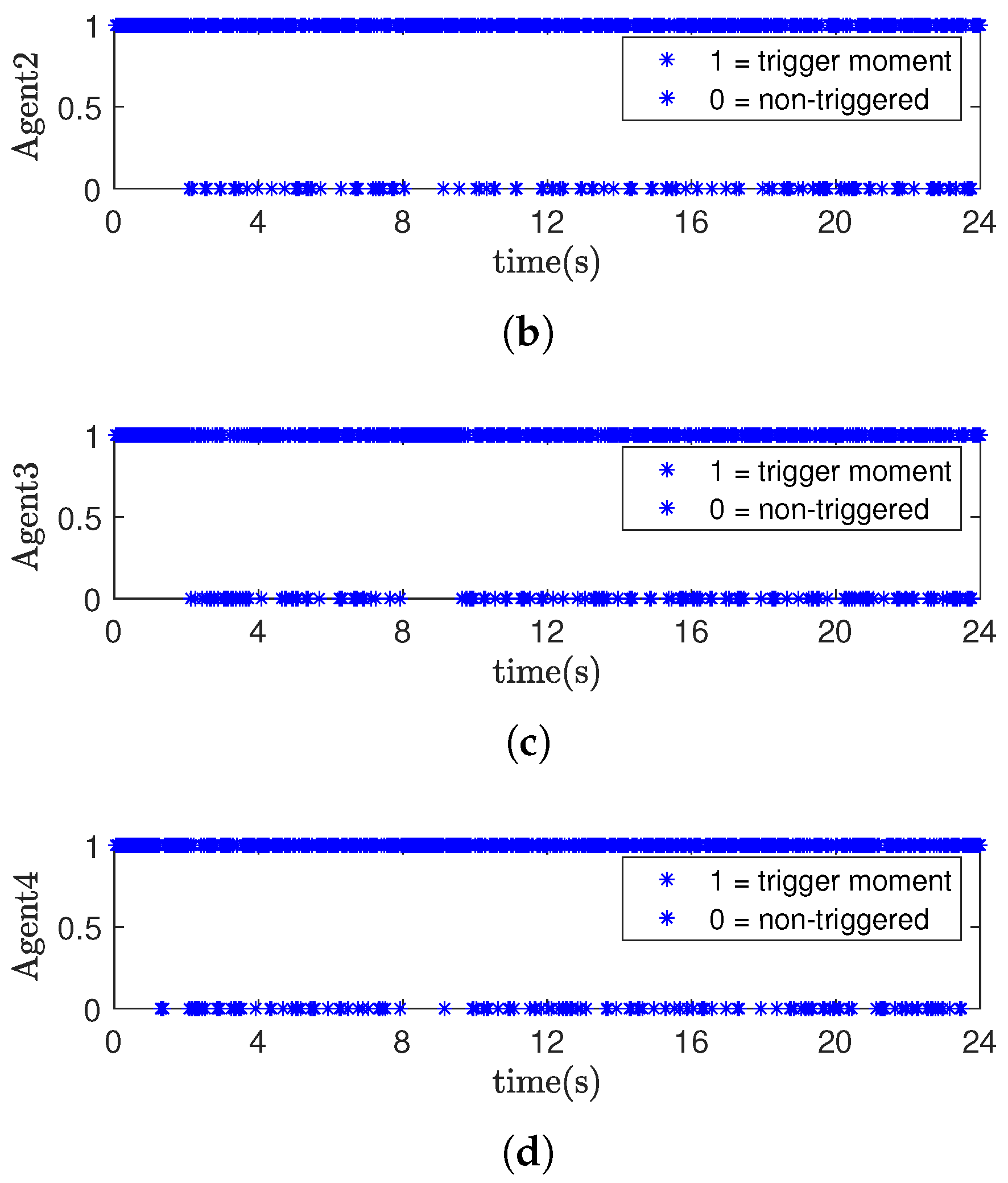
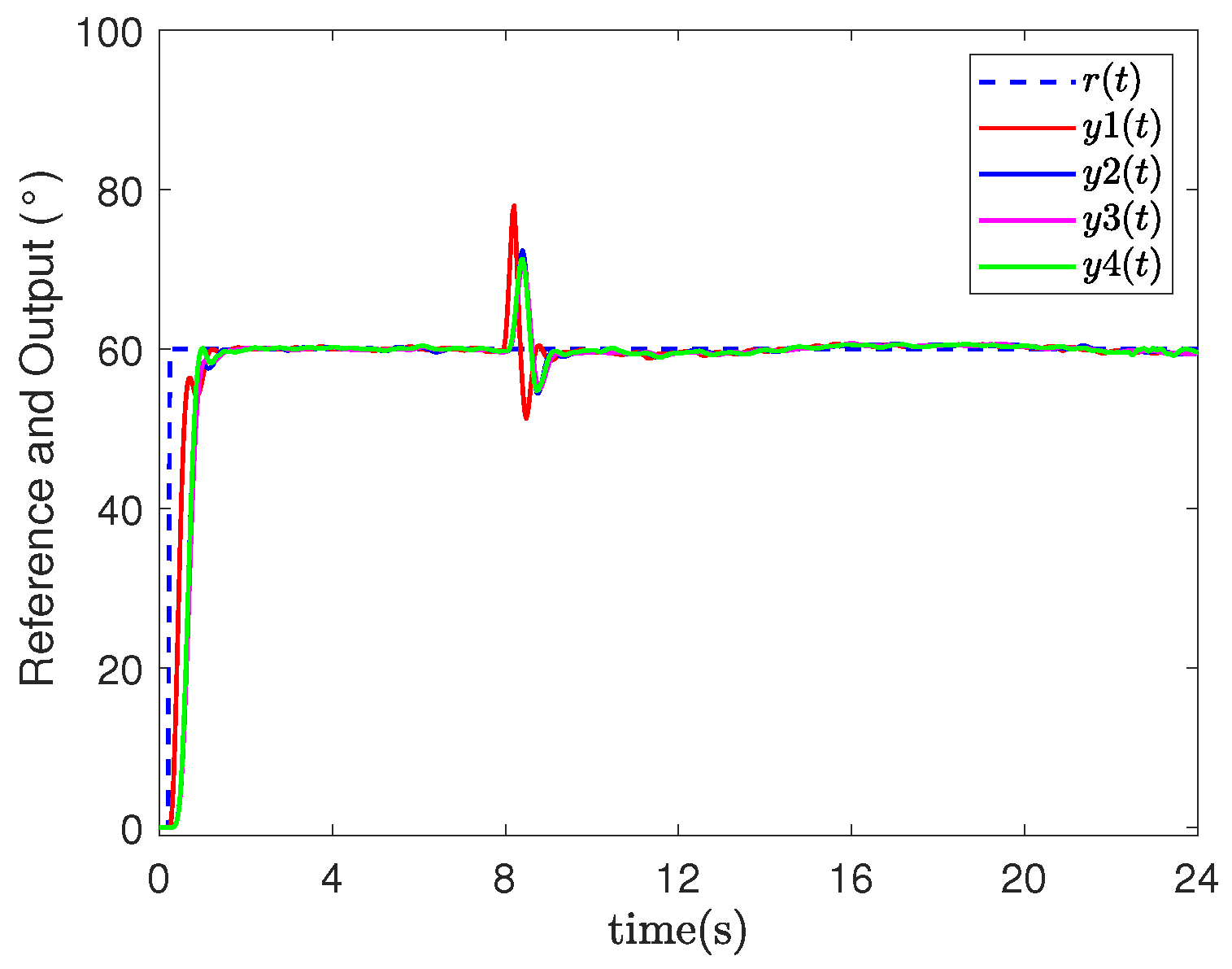
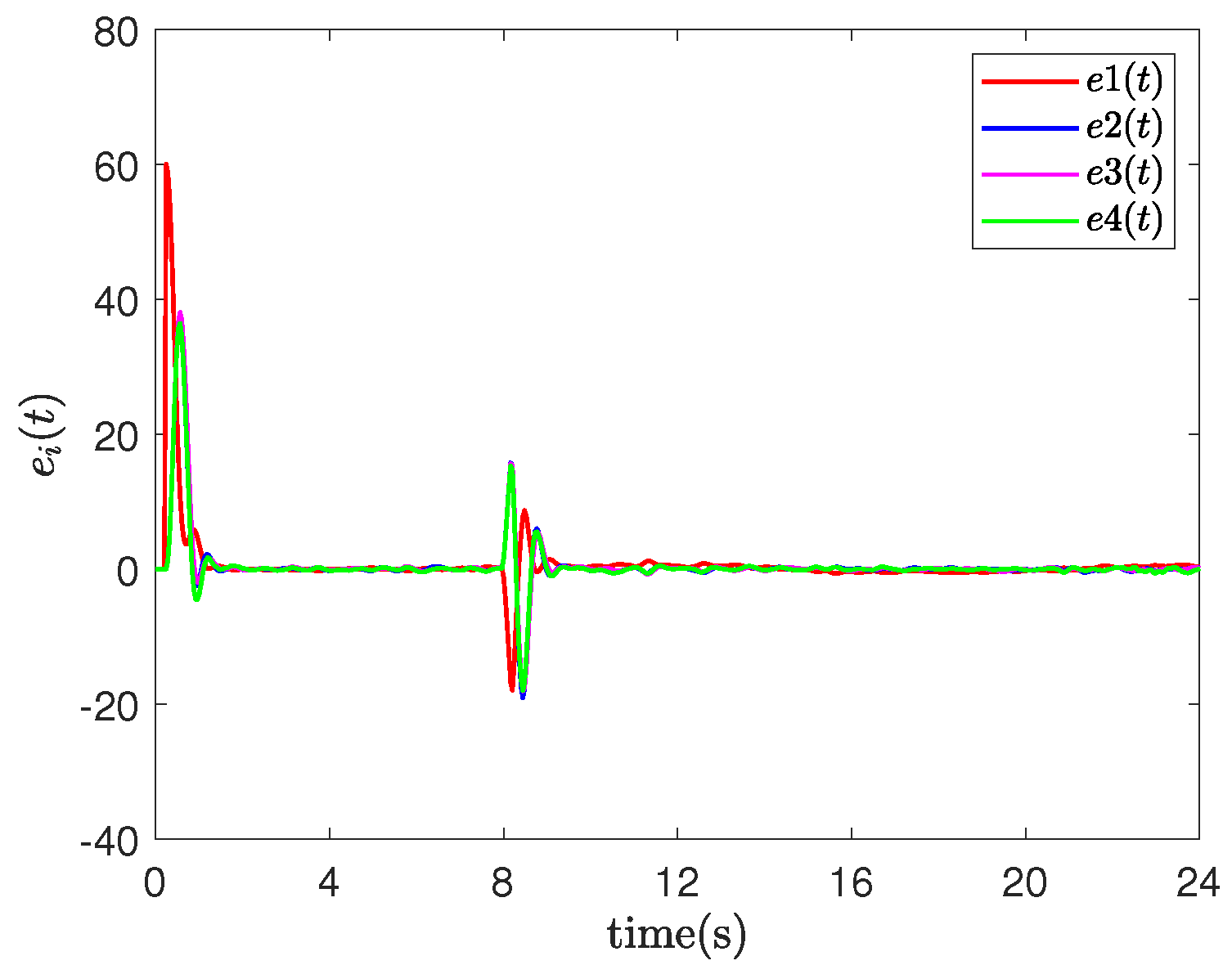
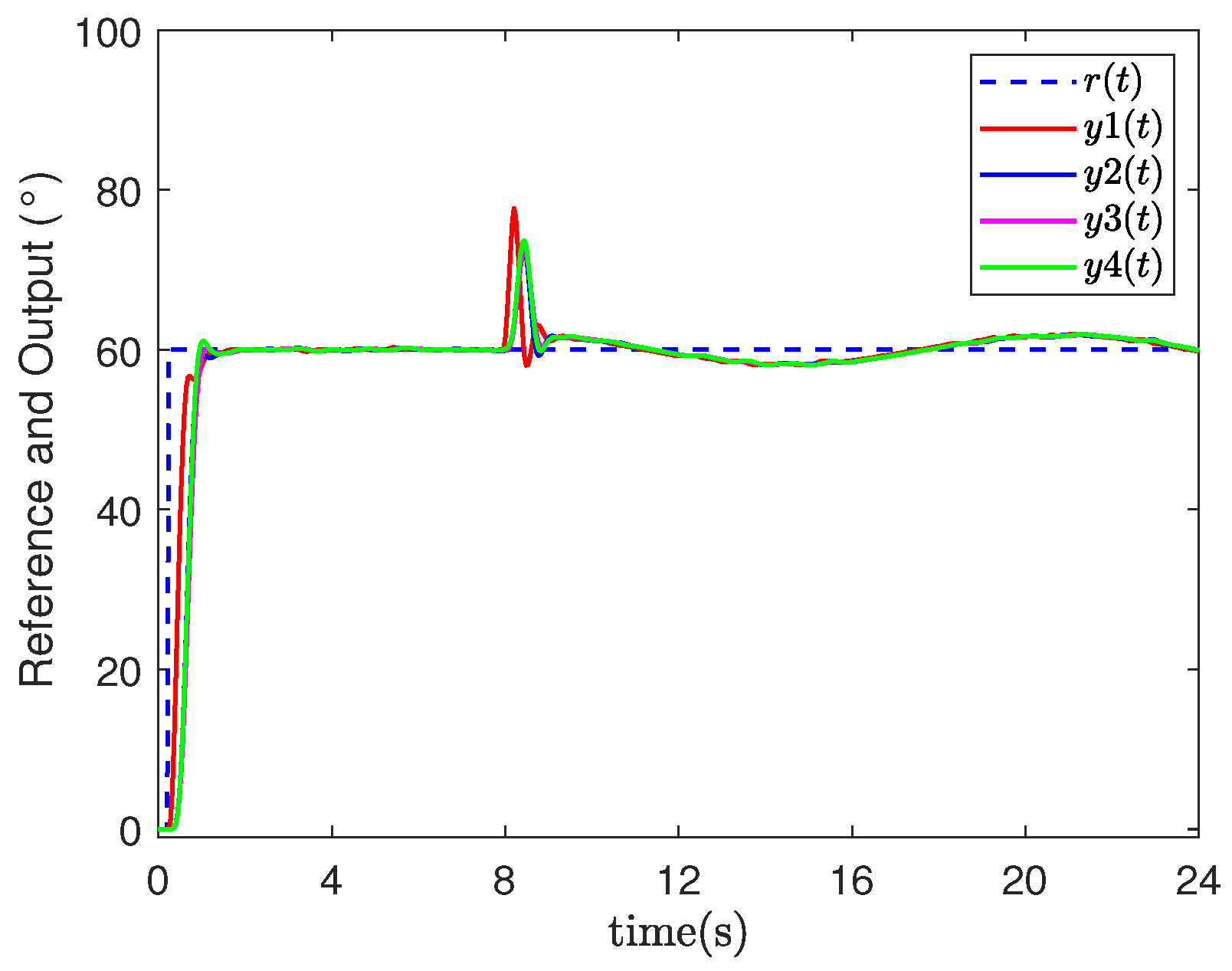
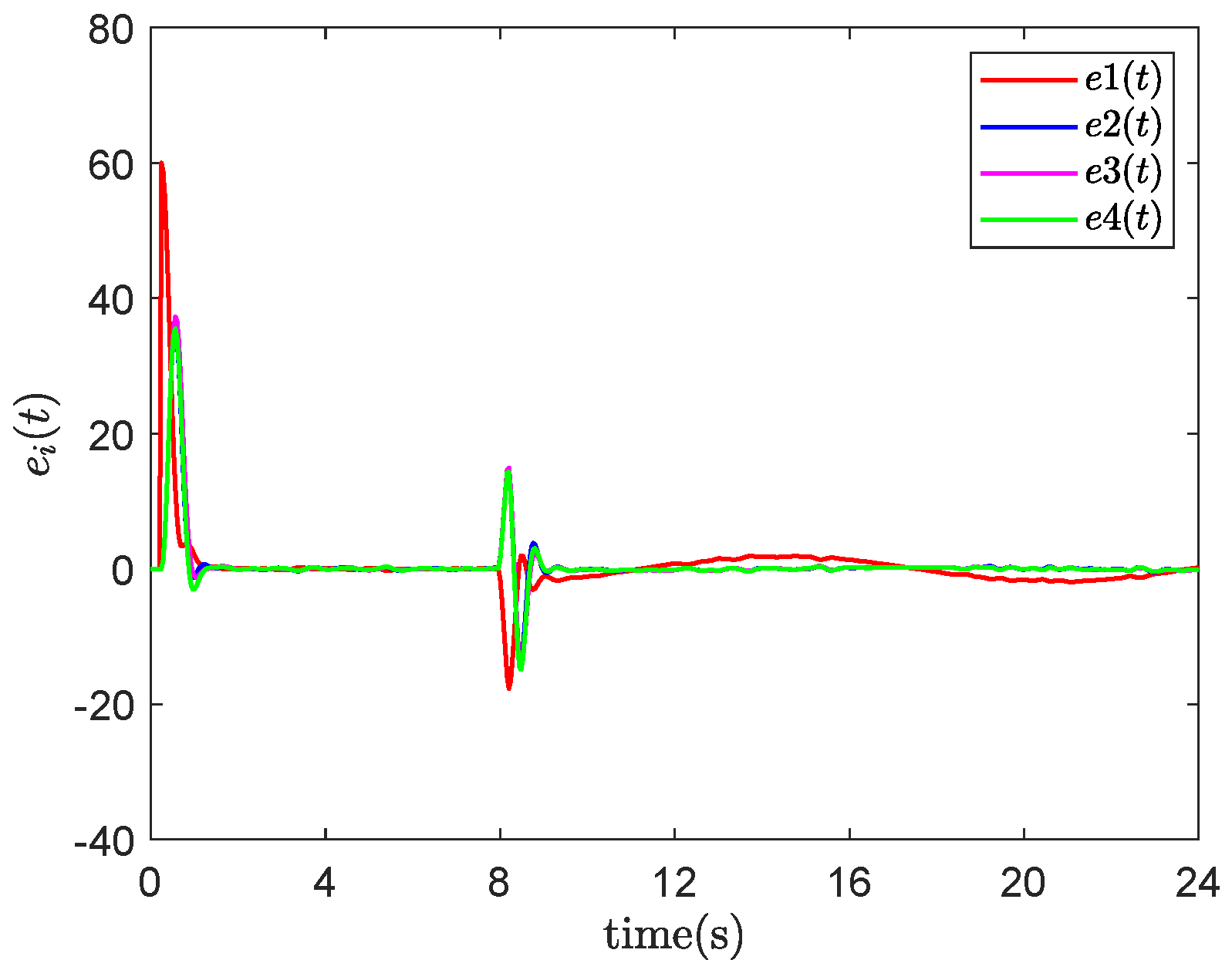
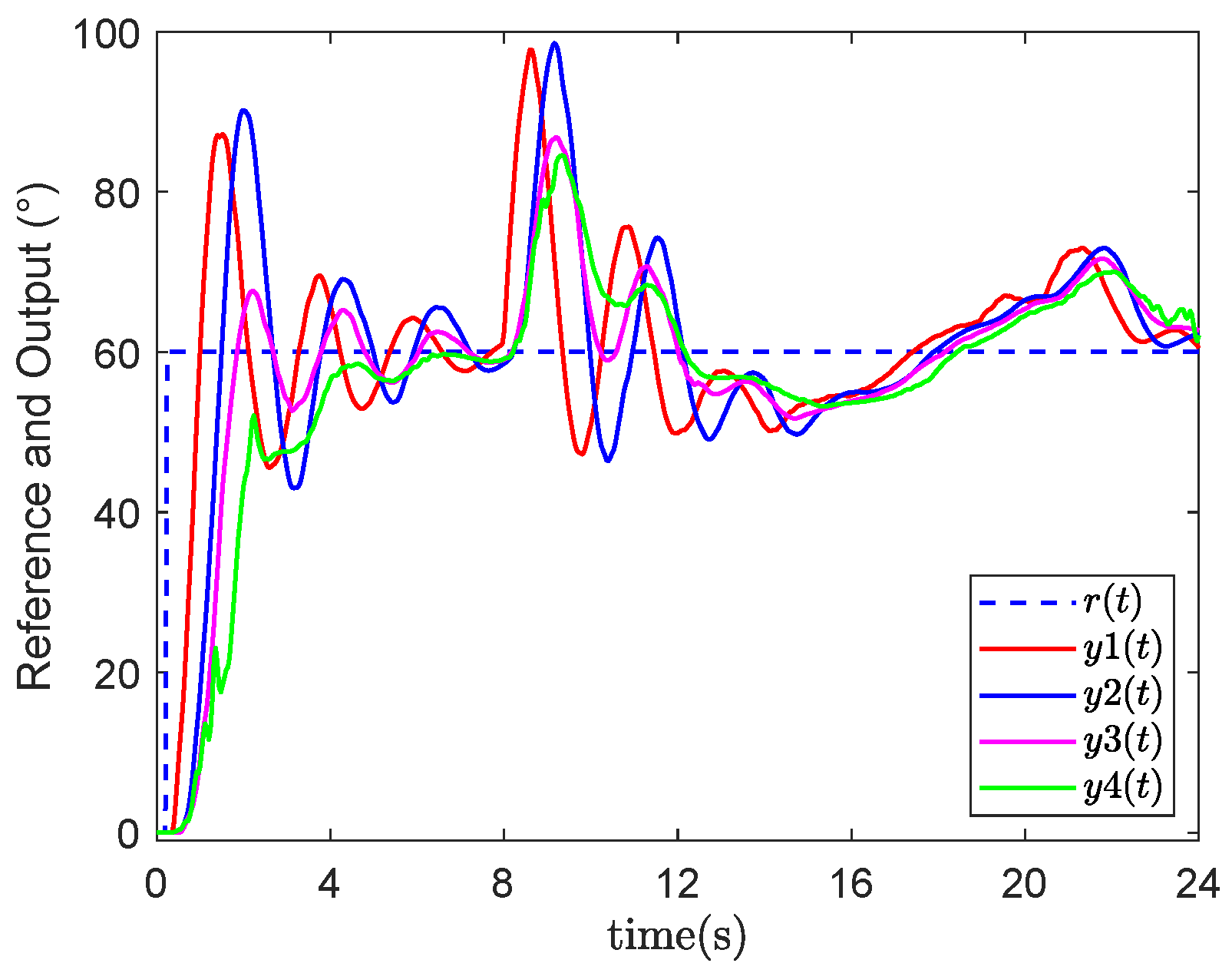
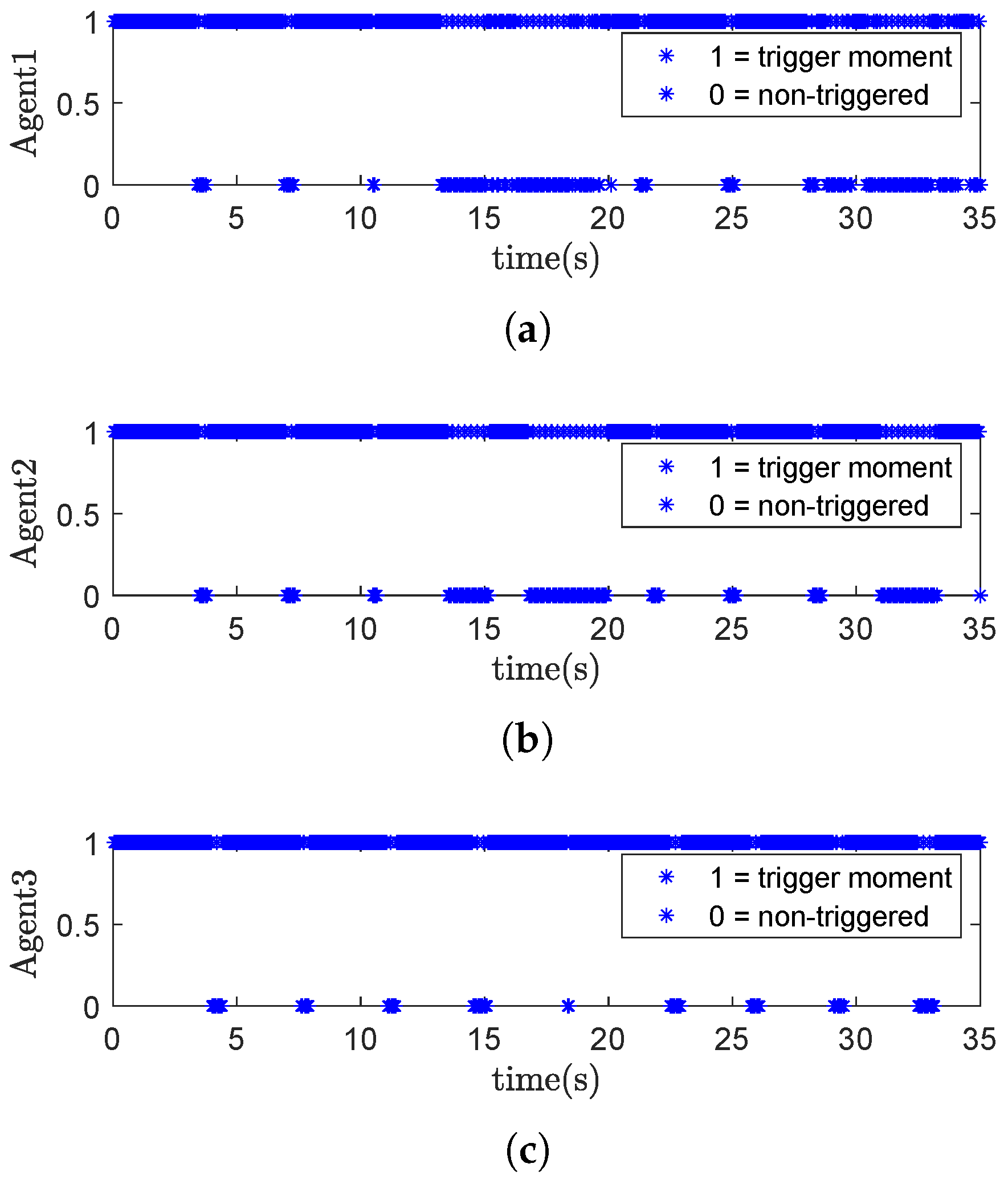
- Event-triggered networked predictive fault-tolerant control (ENPFTC): When agent 1 encounters an actuator fault at 8 s, after compensation by the controller, the system output quickly returns to the vicinity of the reference value as shown in Figure 3, and the tracking error converges to near zero, while the maximum tracking error is less than as shown in Figure 4, indicating that the designed fault-tolerant control method can actively compensate for actuator faults. When the system is stabilized, the event trigger effectively reduces the amount of data transmission in the feedback channel of the agent, the number of event triggers are 478/600, 483/600, 461/600 and 469/600, the statistics of event trigger counts show that the event trigger can reduce the data transmission volume by about , and the event trigger record is shown in Figure 5, where “1(0)” means that the event trigger is (not) triggered. In addition, we updated the actuator fault to when , and repeated the simulation. The output result and tracking errors of ENPFTC are shown in Figure 6 and Figure 7, respectively.
- (2)
- Event-triggered networked predictive control (ENPC): This scheme only compensates for random communication constraints without active fault-tolerant control. As shown in Figure 8, once an actuator fault occurs, the system output fails to maintain a stable state near the reference value. This results in a large tracking error, with the deviation exceeding 1 for an extended period, as illustrated in Figure 9.
- (3)
- Event-triggered fault-tolerant control (EFTC): This scheme does not compensate for the random communication constraints of the system. As shown in Figure 10, the system output is quite bad compared to the previous two methods, while the tracking error has a deviation value exceeding 10 for most of the time, as shown in Figure 11.
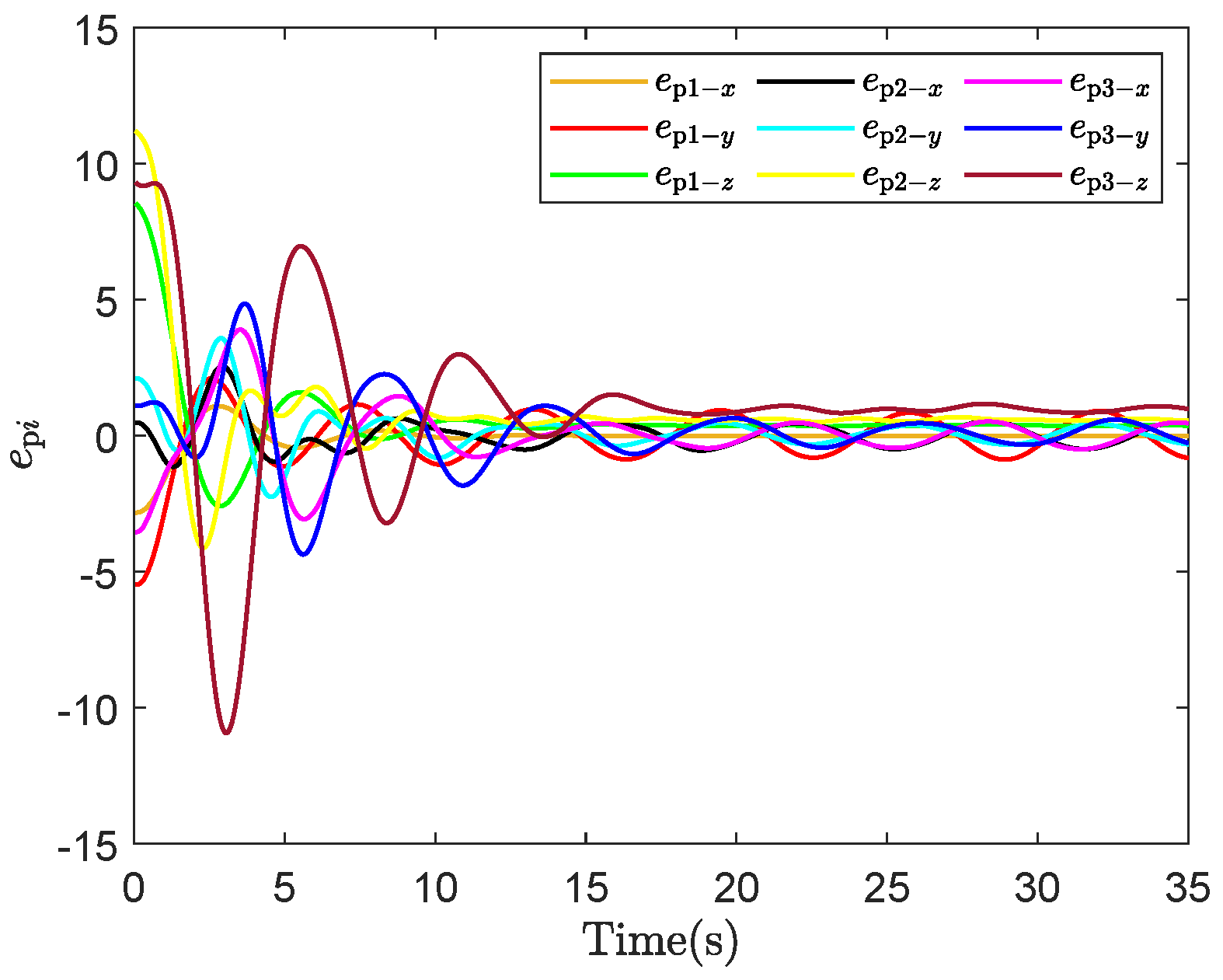
- (1)
- ENPFTC: As shown in Figure 13, the system tends to stabilize after running for a period of time. At 20 s, agent 1 experiences an actuator fault, and the output shows fluctuations. Due to the compensation action of the proposed controller, the tracking error converges to the neighborhood of zero, while the maximum tracking error is less than , indicating that the designed fault-tolerant control method can actively compensate for actuator faults. In Figure 14, the number of event triggers are 516/700, 548/700 and 634/700, respectively, which show that the event trigger can reduce the data transmission volume by about .
- (2)
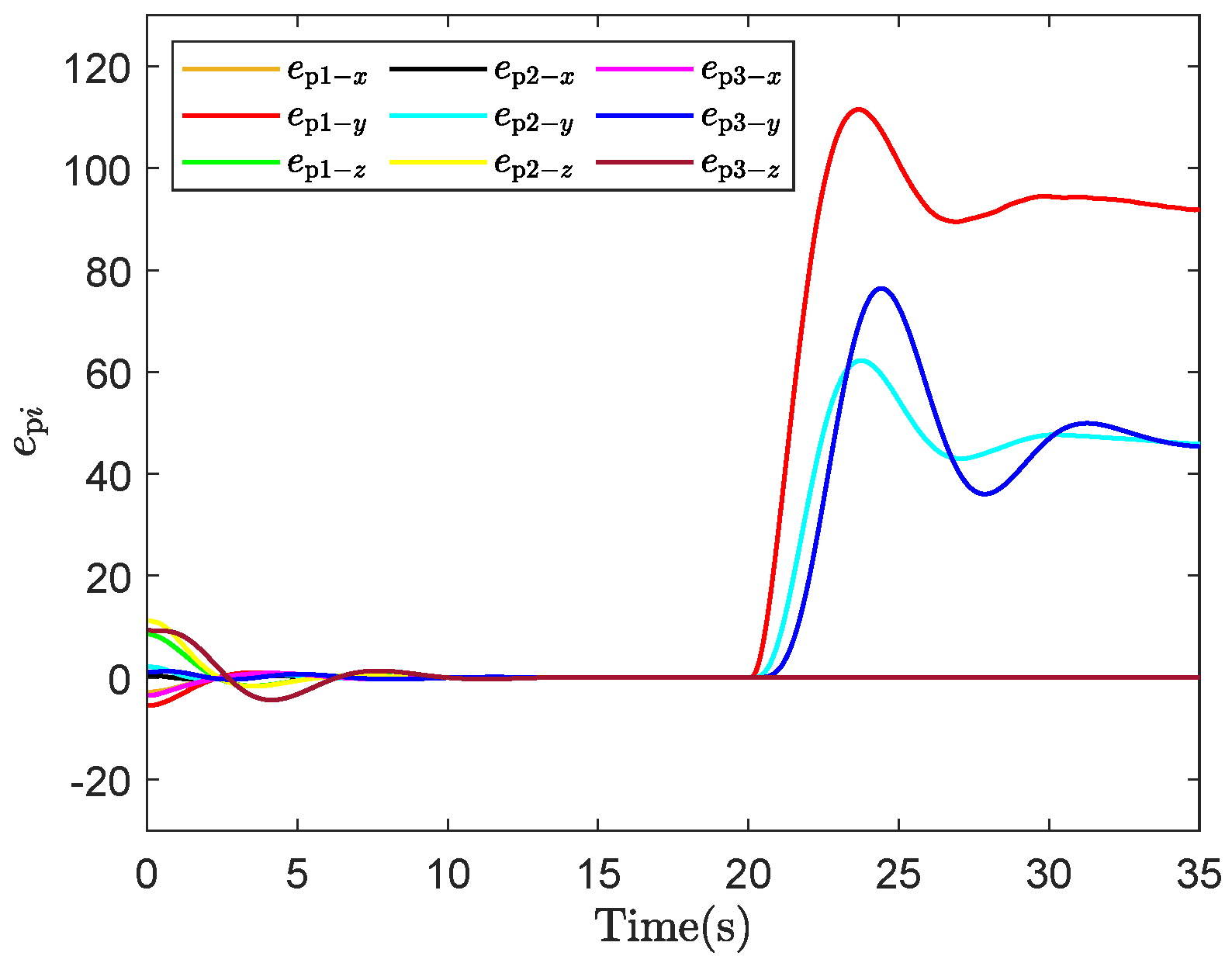
- ENPC: As no fault handling measures are implemented, it can be observed from Figure 15 that the tracking error exceeded 40 after the occurrence of the fault.
- (3)
- EFTC: As can be observed in Figure 16, due to the influence of random communication constraints, the tracking error continues to oscillate persistently, failing to meet the required control performance.
- (4)
- Discussion: ENPC does not consider the impact of actuator faults on the system, while the EFTC method does not take network delay into account. Although both methods have relatively low controller computation loads, they exhibit poor tracking control performance. The ENPFTC method comprehensively considers the system’s data transmission volume, actuator faults, and random network delays. It can reduce data transmission volume by more than 19%, effectively conserving network resources, and achieves better tracking control performance. However, this comes at the cost of increased computational load on the controller. In addition, a performance metric is defined to quantitatively analyze and compare the system’s tracking control performance. The corresponding values for Figure 4, Figure 9, and Figure 11 are 44,982.44, 48,001.29, and 433,741.75, respectively. In the second numerical simulation, the corresponding values of the performance metric of Figure 13, Figure 15, and Figure 16 are , 2,457,205.70 and 2533.19, respectively. These results demonstrate that the ENPFTC method proposed in this paper has better tracking control performance compared to the other two methods. Future work will consider offloading the controller to a cloud-based environment to reduce the local computational burden.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shen, H.; Wen, G.; Lv, Y. Collaborative parameter estimation of multiple unmanned surface vessels: A robust distributed estimator-based approach. IEEE Trans. Ind. Inf. 2024, 20, 1294–1303. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Mu, T.; Yu, Y.; Guo, H.; Liu, G.-P.; Han, Q.-L. Networked predictive control: A survey. IEEE/CAA J. Autom. Sin. 2025; early access. [Google Scholar]
- Zheng, C.-B.; Pang, Z.-H.; Wang, J.-X.; Sun, J.; Liu, G.-P.; Han, Q.-L. Null-space-based time-varying formation control of uncertain nonlinear second-order multi-agent systems with collision avoidance. IEEE Trans. Ind. Electron. 2023, 70, 10476–10485. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Liu, G.-P.; Zhou, D.; Chen, M. Output tracking control for networked systems: A model-based prediction approach. IEEE Trans. Ind. Electron. 2014, 61, 4867–4877. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Du, T.; Gao, S.; Han, Q.-L.; Liu, G.-P. Cooperative tracking control of networked multi-agent systems: A dual-prediction plus correction approach. IEEE Trans. Ind. Inf. 2025, 21, 146–155. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Luo, W.-C.; Liu, G.-P.; Han, Q.-L. Observer-based incremental predictive control of networked multi-agent systems with random delays and packet dropouts. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 426–430. [Google Scholar] [CrossRef]
- Li, T.; Zhang, W.; Yu, L. Improved switched system approach to networked control systems with time-varying delays. IEEE Trans. Control Syst. Technol. 2019, 27, 2711–2717. [Google Scholar] [CrossRef]
- Li, L.; Yao, L. Fault tolerant control of fuzzy stochastic distribution systems with packet dropout and time delay. IEEE Trans. Autom. Sci. Eng. 2024, 21, 2638–2647. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Zheng, C.-B.; Li, C.; Liu, G.-P.; Han, Q.-L. Cloud-based time-varying formation predictive control of multi-agent systems with random communication constraints and quantized signals. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1282–1286. [Google Scholar] [CrossRef]
- Zhu, Z.; Yin, Y.; Wang, F.; Liu, Z.; Chen, Z. Practical robust fixed-time containment control for multi-agent systems under actuator faults. Expert Syst. Appl. 2024, 245, 123152. [Google Scholar] [CrossRef]
- Ma, Y.; Jiang, B.; Wang, J.; Gong, J. Adaptive fault-tolerant formation control for heterogeneous UAVs-UGVs systems with multiple actuator faults. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6705–6716. [Google Scholar] [CrossRef]
- Du, D.; Li, Z. Passive fault-tolerant control for discrete parameter system. IET Power Electron. 2023, 16, 1969–1983. [Google Scholar] [CrossRef]
- Shi, J.; Chen, X.; Xing, S.; Liu, A.; Chen, C. Robust cooperative fault-tolerant control for uncertain multi-agent systems subject to actuator faults. Sensors 2024, 24, 2651. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Zhang, N.; Wu, G.; Li, Z.; Ding, H.; Jiang, C. Active fault-tolerant control of a four-wheel independent steering system based on the multi-agent approach. Electronics 2024, 13, 748. [Google Scholar] [CrossRef]
- Feng, Z.; Hu, G. Connectivity-preserving flocking for networked Lagrange systems with time-varying actuator faults. Automatica 2019, 109, 108509. [Google Scholar] [CrossRef]
- Rahimi, F.; Esfanjani, R. Estimating tolerable communication delays for distributed optimization problems in control of heterogeneous multi-agent systems. IET Control Theory Appl. 2024, 18, 626–639. [Google Scholar] [CrossRef]
- Li, S.; Chen, Y.; Liu, X. Fault estimation and fault-tolerant tracking control for multi-agent systems with lipschitz nonlinearities using double periodic event-triggered mechanism. IEEE Trans. Signal Inf. Process. Networks 2023, 9, 229–241. [Google Scholar] [CrossRef]
- Xu, N.; Chen, Z.; Niu, B.; Zhao, X. Event-triggered distributed consensus tracking for nonlinear multi-agent systems: A minimal approximation approach. IEEE J. Emerging Sel. Top. Circuits Syst. 2023, 13, 767–779. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; Wu, L. Adaptive fault-tolerant consensus control of multi-agent systems with event-triggered inputs. Inf. Sci. 2023, 650, 119594. [Google Scholar] [CrossRef]
- Wang, J.; Zheng, Y.; Deng, J.; Zhang, H.; Sun, J. Memory-based event-triggered fault-tolerant consensus control of nonlinear multi-agent systems and its applications. IEEE Trans. Autom. Sci. Eng. 2025, 22, 7941–7954. [Google Scholar] [CrossRef]
- Li, C.; Wang, S.; Pang, Z.; Zheng, C.; Sun, D.; Xu, S. Active fault-tolerant predictive control for networked multi-agent systems with actuator faults and random communication constraints. In Proceedings of the 2023 IEEE 12th Data Driven Control and Learning Systems Conference (DDCLS), Xiangtan, China, 12–14 May 2023; pp. 1859–1864. [Google Scholar]
- Pang, Z.-H.; Liu, G.-P.; Zhou, D.; Hou, F.; Sun, D. Two-channel false data injection attacks against output tracking control of networked systems. IEEE Trans. Ind. Electron. 2016, 63, 3242–3251. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Li, P.; Zheng, C.-B.; Guo, H.; Dong, Z. Event-Triggered Active Fault-Tolerant Predictive Control for Networked Multi-Agent Systems with Actuator Faults and Random Communication Constraints. Appl. Sci. 2025, 15, 6317. https://doi.org/10.3390/app15116317
Li C, Li P, Zheng C-B, Guo H, Dong Z. Event-Triggered Active Fault-Tolerant Predictive Control for Networked Multi-Agent Systems with Actuator Faults and Random Communication Constraints. Applied Sciences. 2025; 15(11):6317. https://doi.org/10.3390/app15116317
Chicago/Turabian StyleLi, Chao, Peilin Li, Chang-Bing Zheng, Haibin Guo, and Zhe Dong. 2025. "Event-Triggered Active Fault-Tolerant Predictive Control for Networked Multi-Agent Systems with Actuator Faults and Random Communication Constraints" Applied Sciences 15, no. 11: 6317. https://doi.org/10.3390/app15116317
APA StyleLi, C., Li, P., Zheng, C.-B., Guo, H., & Dong, Z. (2025). Event-Triggered Active Fault-Tolerant Predictive Control for Networked Multi-Agent Systems with Actuator Faults and Random Communication Constraints. Applied Sciences, 15(11), 6317. https://doi.org/10.3390/app15116317