
Deterministic Discrete Fracture Network Model and Its Application in Rock Mass Engineering


Abstract
1. Introduction
2. Acquisition of Structural Surface Parameters
2.1. Data Processing and Raster Model Generation
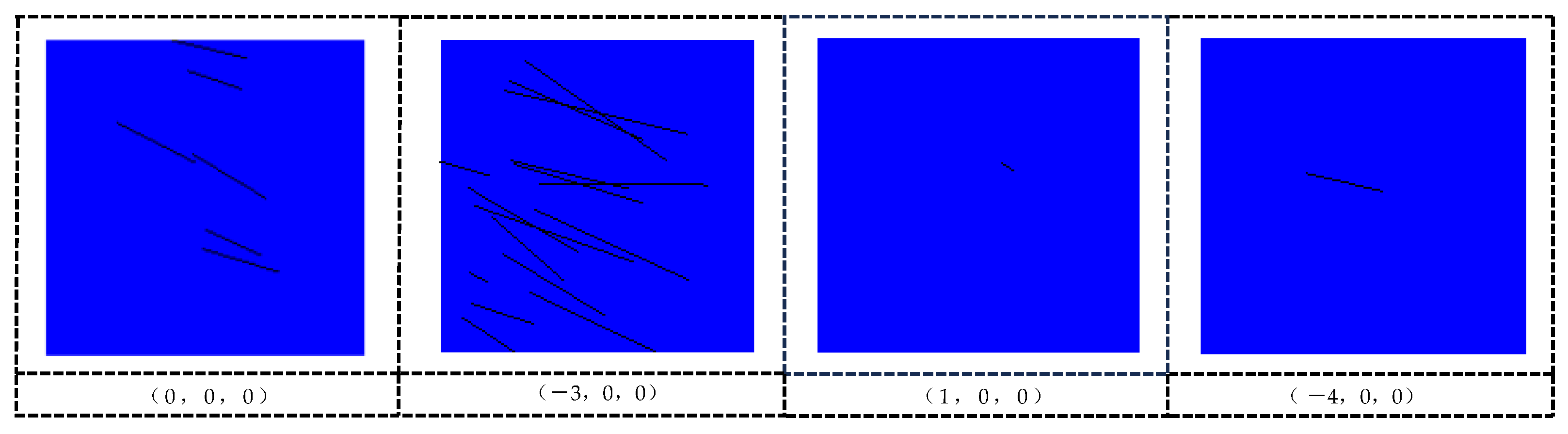
2.2. Directional Feature Extraction and Clustering Analysis
2.3. Structural Surface Parameters Retrieval
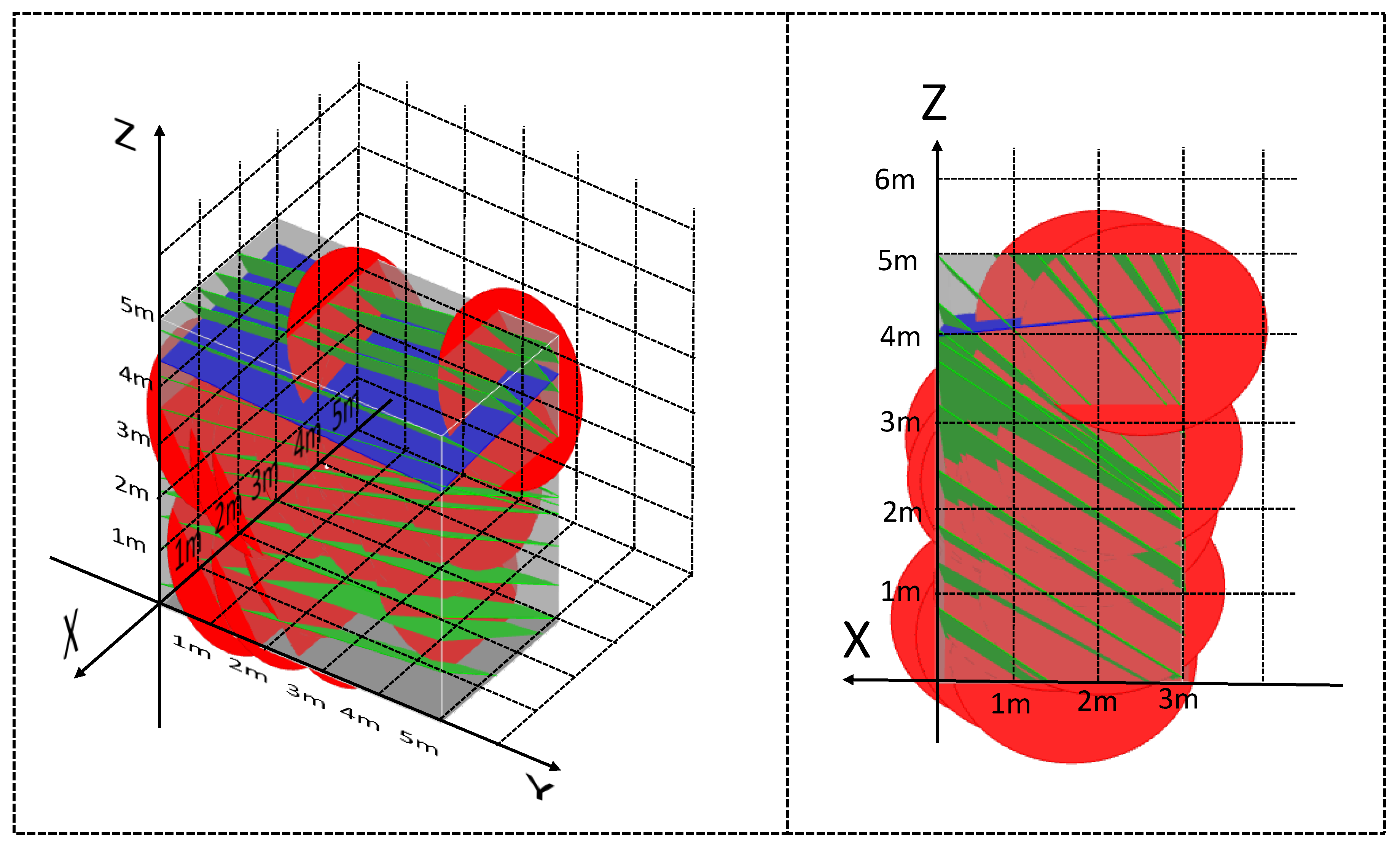
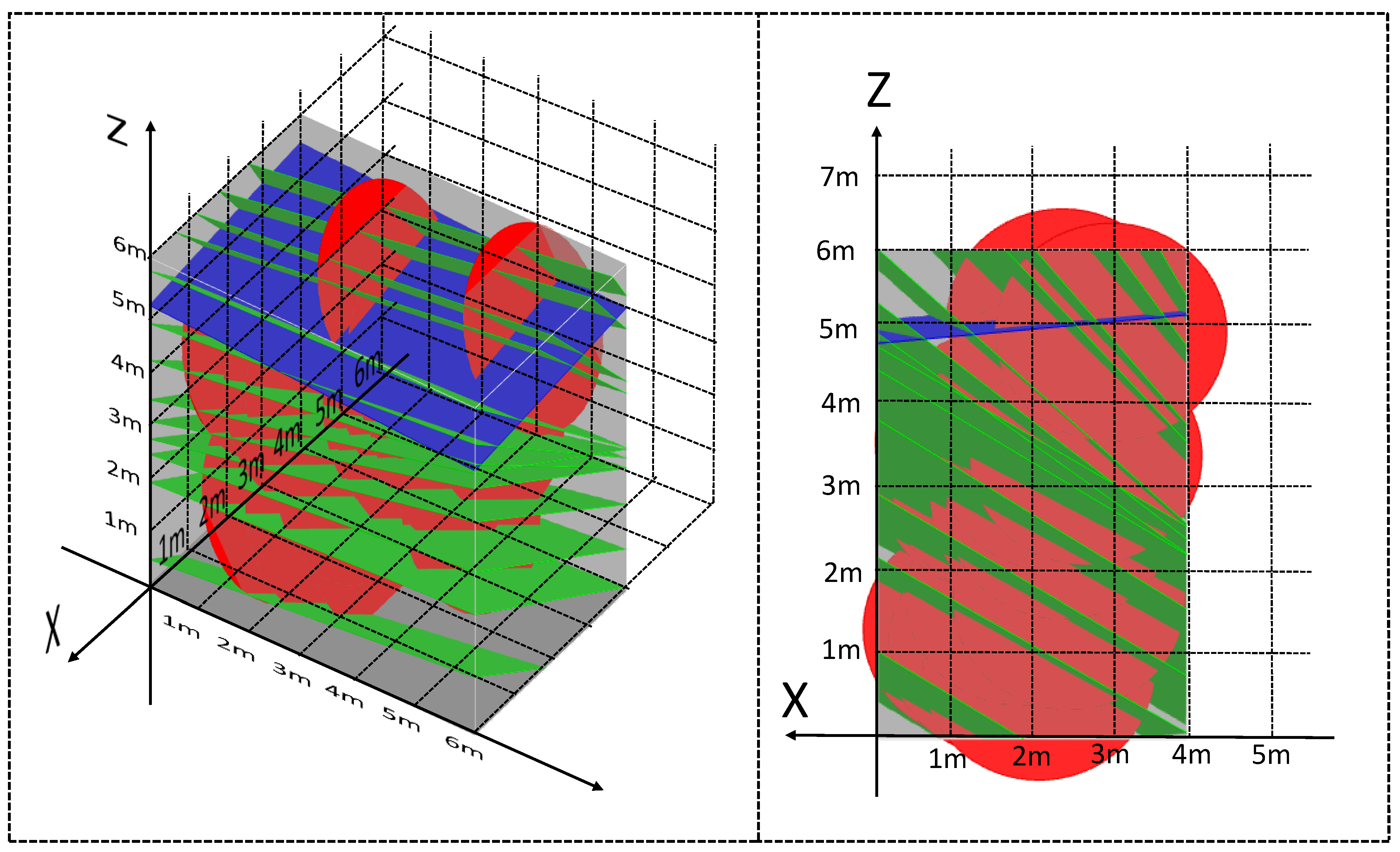
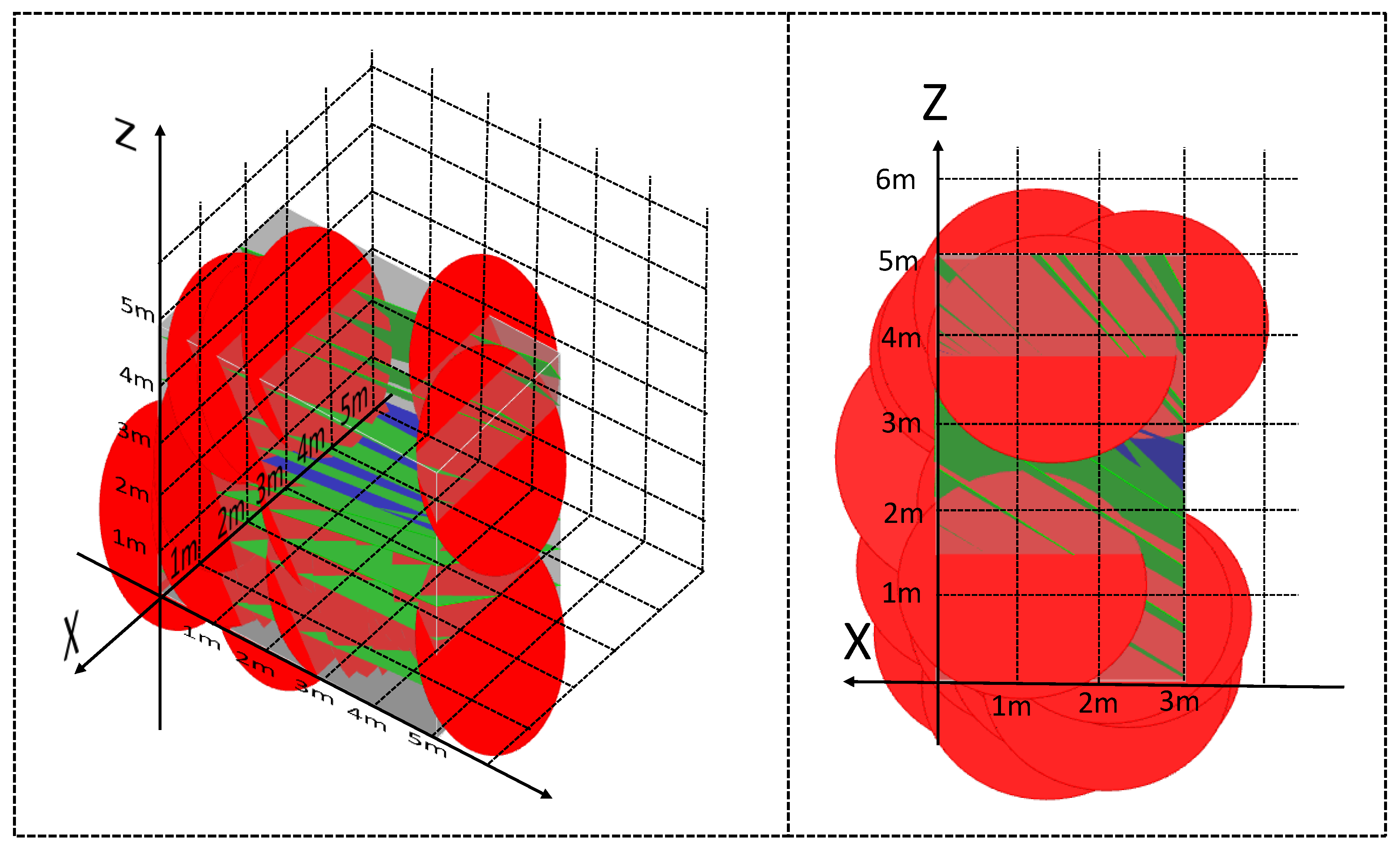
2.4. Structural 3D Modeling of Rock Mass
3. Example Verification
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Westaway, R.M.; Lane, S.N.; Hicks, D.M. The development of an automated correction -procedure for digital photogrammetry for the study of wide, shallow, gravel-bed rivers. Earth Surf. Process. Landf. 2000, 25, 209–226. [Google Scholar] [CrossRef]
- Chandler, J. Effective application of automated digital photogrammetry for geomorphological research. Earth Surf. Process. Landf. 1999, 24, 51–63. [Google Scholar] [CrossRef]
- Assali, P.; Grussenmeyer, P.; Villemin, T.; Pollet, N.; Viguier, F. Surveying and modeling of rock discontinuities by terrestrial laser scanning and photogrammetry: Semi-automatic approaches for linear outcrop inspection. J. Struct. Geol. 2014, 66, 102–114. [Google Scholar] [CrossRef]
- Li, X.; Chen, J.; Zhu, H. A new method for automated discontinuity trace mapping on rock mass 3D surface model. Comput. Geosci. 2016, 89, 118–131. [Google Scholar] [CrossRef]
- Umili, G.; Ferrero, A.; Einstein, H. A new method for automatic discontinuity traces sampling on rock mass 3D model. Comput. Geosci. 2013, 51, 182–192. [Google Scholar] [CrossRef]
- Lane, S.N.; James, T.D.; Crowell, M.D. Application of Digital Photogrammetry to Complex Topography for Geomorphological Research. Photogramm. Rec. 2000, 16, 793–821. [Google Scholar] [CrossRef]
- Long, J.C.S.; Remer, J.S.; Wilson, C.R.; Witherspoon, P.A. Porous media Equivalents for Networks of Discontinuous Fractures. Water Resour. Res. 1982, 18, 645–658. [Google Scholar] [CrossRef]
- Cacciari, P.P.; Futai, M.M. Modeling a Shallow Rock Tunnel Using Terrestrial Laser Scanning and Discrete Fracture Networks. Rock Mech. Rock Eng. 2017, 50, 1217–1242. [Google Scholar] [CrossRef]
- Hardebol, N.J.; Maier, C.; Nick, H.; Geiger, S.; Bertotti, G.; Boro, H. Multiscale fracture network characterization and impact on flow: A case study on the Latemar carbonate platform. J. Geophys. Res. Solid Earth 2015, 120, 8197–8222. [Google Scholar] [CrossRef]
- Liu, R.; Jiang, Y.; Li, B.; Wang, X. A fractal model for characterizing fluid flow in fractured rock masses based on randomly distributed rock fracture networks. Comput. Geotech. 2015, 65, 45–55. [Google Scholar] [CrossRef]
- Zhang, K.; Qi, F.; Bao, R.; Xie, J.B. Physical reconstruction and mechanical behavior of fractured rock masses. Bull. Eng. Geol. Environ. 2021, 80, 4441–4457. [Google Scholar] [CrossRef]
- Guo, L.; Li, X.; Zhou, Y.; Zhang, Y.; Suo, P.; Tu, C. Three-dimensional network simulation of structural planes in fractured rock masses based on the coupling of stochastic and deterministic methods. Rock Soil Mech. 2016, 37, 2636–2644, 2653. [Google Scholar]
- Wang, S.H.; Mu, X.J.; Zhang, H.; Zhang, S.C. Spatial Modeling of Refined Structural Plane of Rock Mass and Block Stability Analysis. J. Northeast Univ. (Nat. Sci.) 2012, 8, 1186–1189. [Google Scholar]
- Bandyopadhyay, K.; Mallik, J. An optimum solution for coal permeability estimation from mesoscopic scale calibrated stochastic and deterministic discrete fracture network models. Fuel 2022, 331, 125626. [Google Scholar] [CrossRef]
- Pan, D.; Li, S.; Xu, Z.; Zhang, Y.; Lin, P.; Li, H. A deterministic-stochastic identification and modelling method of discrete fracture networks using laser scanning: Development and case study. Eng. Geol. 2019, 262, 105310. [Google Scholar] [CrossRef]
- Liu, T.; Deng, J. Photogrammetry-Based 3D Textured Point Cloud Models Building and Rock Structure Estimation. Appl. Sci. 2023, 13, 4977. [Google Scholar] [CrossRef]
- Jiang, S.H.; Chen, J.D.; Zou, Z.Y. Stability analysis of jointed rock slopes based on a universal elliptical disc model and its realization in 3DEC. Chin. J. Rock Mech. Eng. 2023, 42, 1610–1622. [Google Scholar]
- Hekmatnejad, A.; Emery, X.; Vallejos, J.A. Robust estimation of the fracture diameter distribution from the true trace length distribution in the Poisson-disc discrete fracture network model. Comput. Geotech. 2018, 95, 137–146. [Google Scholar] [CrossRef]
- Zhao, X.Y.; You, Y.C.; Hu, X.Y.; Li, J.; Li, Y. Classified-staged-grouped 3D modeling of multi-scale fractures constrained by genetic mechanisms and main controlling factors: A case study on biohermal carbonate reservoir of the Upper Permian Changxing Fm. in Yuanba area, Sichuan Basin. Oil Gas Geol. 2023, 44, 213–225. [Google Scholar]
- Zhan, D.; Shao, Z.P.; Zeng, L.; Wang, Y.J.; Tong, L. A Study on Fracture Modelling of the Bedrock Reservoir in Dongping Gas Field, Qaidam Basin. J. Southwest Pet. Univ. (Sci. Technol. Ed.) 2019, 41, 71–79. [Google Scholar]
- Zhou, Q.M.; Liu, X.J. Analysis of errors of derived slope and aspect related to DEM data properties. Comput. Geosci. 2004, 30, 369–378. [Google Scholar] [CrossRef]
- Zhang, P.; Li, J.; Yang, X.; Zhu, H. Semi-automatic extraction of rock discontinuities from point clouds using the ISODATA clustering algorithm and deviation from mean elevation. Int. J. Rock Mech. Min. Sci. Géoméch. Abstr. 2018, 110, 76–87. [Google Scholar] [CrossRef]
- Zhang, P.; Qian, X.; Guo, X.; Yang, X.; Li, G. Automated demarcation of the homogeneous domains of trace distribution within a rock mass based on GLCM and ISODATA. Int. J. Rock Mech. Min. Sci. Géoméch. Abstr. 2020, 128, 104249. [Google Scholar] [CrossRef]
- Wang, X.M.; Niu, R.Q.; Wu, T. Research on lithology intelligent classification for Three Gorges Reservoir area. Rock Soil Mech. 2010, 31, 2946–2950. [Google Scholar]
- Guo, J.T.; Zhang, Z.R.; Mao, Y.C.; Liu, S.J. Automatic Discontinuity Classification and Parameter Calculation from Rock Mass 3D Point Cloud. Dong Bei Da Xue Xue Bao/J. Northeast. Univ. 2020, 41, 1161–1166. [Google Scholar]
- Xia, L.; Zheng, Y.; Yu, Q. Estimation of the REV size for blockiness of fractured rock masses. Comput. Geotech. 2016, 76, 83–92. [Google Scholar] [CrossRef]
- Xia, L.; Xie, J.; Yu, Q.C. Influence of statistical distribution dispersion in the fracture size on blockiness REV of fractured rock masses. Hydrogeol. Eng. Geol. 2019, 46, 112–118. [Google Scholar]
- Zhang, L.L.; Zhang, X.; Wang, Y. Determining of the REV for fracture rock mass of very low ductility. Hydrogeol. Eng. Geol. 2011, 38, 20–25. [Google Scholar]
- Zhang, Q.; Wang, X.; Zhu, H.; Zhang, K.; Li, X. Mixture distribution model for three-dimensional geometric attributes of multiple discontinuity sets based on trace data of rock mass. Eng. Geol. 2022, 311, 106915. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, X.; He, L.; Tian, L. Estimation of Fracture Orientation Distributions from a Sampling Window Based on Geometric Probabilistic Method. Rock Mech. Rock Eng. 2021, 54, 3051–3075. [Google Scholar] [CrossRef]
- Chen, Q.F.; Wei, C.S.; Niu, W.J.; Chen, D.Y.; Feng, C.H.; Fan, Q.Y. Stability classification of roadway roof in fractured rock mass based on blockiness theory. Rock Soil Mech. 2014, 35, 2901–2908. [Google Scholar]
- He, D.Z.; Hu, B.; Yao, W.M.; Li, L.C.; Li, H.Z. Stability grading method for open-pit slope based on blockiness and cloud model. Min. Metall. Eng. 2017, 37, 6–10. [Google Scholar]
- Chen, Q.F.; Niu, W.J.; Zheng, W.S.; Liu, J.G.; Yin, T.C.; Fan, Q.Y. Correction of the problems of blockiness evaluation method for fractured rock mass. Rock Soil Mech. 2018, 39, 3727–3734. [Google Scholar]
- The Ministry of Water Resources of the People’s Republic of China. GB50218-94 Standard for Engineering Classification of Rock Masses; China Planning Press: Beijing, China, 1994.
- Ding, Z.J.; Zheng, J.; Lü, Q.; Deng, J.H.; Tong, M.S. Discussion on calculation methods of quality index of slope engineering rock mass in Standard for engineering classification of rock mass. Rock Soil Mech. 2019, 40, 275–280. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VCS1 0.04 m | VCS2 0.06 m | CS1 0.13 m | CS2 0.2 m | MS1 0.4 m | MS2 0.6 m | WS1 1.3 m | WS2 2 m | VWS 4 m | |
|---|---|---|---|---|---|---|---|---|---|
| VHP 20 m | 0.079 | 0.053 | 0.024 | 0.015 | 0.008 | 0.005 | 0.002 | 0.001 | 0.000 |
| HP 15 m | 0.141 | 0.094 | 0.043 | 0.028 | 0.014 | 0.009 | 0.004 | 0.002 | 0.001 |
| MP1 10 m | 0.318 | 0.212 | 0.097 | 0.063 | 0.031 | 0.021 | 0.009 | 0.006 | 0.003 |
| MP2 6.5 m | 0.753 | 0.502 | 0.231 | 0.150 | 0.075 | 0.050 | 0.023 | 0.015 | 0.007 |
| LP1 3 m | 3.536 | 2.357 | 1.088 | 0.707 | 0.353 | 0.235 | 0.108 | 0.070 | 0.035 |
| LP2 2 m | 7.957 | 5.305 | 2.448 | 1.591 | 0.795 | 0.530 | 0.244 | 0.159 | 0.079 |
| VLP 1 m | 31.831 | 21.220 | 9.794 | 6.366 | 3.183 | 2.122 | 0.979 | 0.636 | 0.318 |
| Classification of Blocking Degree | Rock Mass Grade | Percentage of Block |
|---|---|---|
| Non-blocky rock | V | 0–10 |
| Slightly blocky rock | IV | 10–30 |
| Moderately blocky rock | III | 30–60 |
| Blocky rock | I/II | More than 60 |
| Cluster Partition | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| DEV | \ | \ | −0.0009 | \ | 0.0001 | −0.0017 | −0.0038 | −0.0004 |
| Red | Dip Direction (°) | Dip Angle (°) | Space (m) | Red | Dip Direction (°) | Dip Angle (°) | Space (m) | ||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 90.47 | 59.69 | / | 11 | 92.16 | 50.47 | 0.754 | ||
| 2 | 89.55 | 63.62 | 0.035 | 12 | 96.88 | 58.54 | 0.380 | ||
| 3 | 87.92 | 57.87 | 0.004 | 13 | 100.86 | 59.01 | 0.334 | ||
| 4 | 95.80 | 54.56 | 1.152 | 14 | 103.55 | 68.60 | 0.066 | ||
| 5 | 91.33 | 57.09 | 0.278 | 15 | 89.60 | 66.55 | 0.580 | ||
| 6 | 92.39 | 50.63 | 1.042 | 16 | 93.29 | 58.57 | 0.488 | ||
| 7 | 90.55 | 53.66 | 0.028 | 17 | 91.77 | 52.41 | 0.200 | ||
| 8 | 83.70 | 63.06 | 0.156 | 18 | 92.88 | 54.89 | 0.161 | ||
| 9 | 105.99 | 66.68 | 0.156 | 19 | 96.35 | 54.97 | 1.309 | ||
| 10 | 90.95 | 60.39 | 0.049 | 20 | 87.65 | 54.30 | 0.122 | ||
| Red | Midpoint Coordinates of Trace (m) | Trace Length (m) | Red | Midpoint Coordinates of Trace (m) | Trace Length (m) | ||||
| 1 | 2.52 | 4.51 | −2.90 | 0.07 | 11 | 1.39 | 2.54 | −2.03 | 0.13 |
| 2 | 4.77 | 4.34 | −3.52 | 0.07 | 12 | 2.99 | 2.28 | −2.70 | 0.14 |
| 3 | 3.16 | 3.55 | −2.78 | 0.07 | 13 | 1.68 | 2.50 | −2.20 | 0.14 |
| 4 | 2.88 | 3.40 | −2.69 | 0.08 | 14 | 2.77 | 2.49 | −2.67 | 0.16 |
| 5 | 4.10 | 3.40 | −3.06 | 0.08 | 15 | 3.66 | 2.23 | −2.84 | 0.15 |
| 6 | 0.66 | 3.03 | −1.98 | 0.09 | 16 | 3.99 | 1.15 | −2.98 | 0.18 |
| 7 | 3.04 | 3.07 | −2.70 | 0.09 | 17 | 2.08 | 1.20 | −2.37 | 0.19 |
| 8 | 3.48 | 2.79 | −2.81 | 0.10 | 18 | 1.14 | 0.80 | −1.82 | 0.19 |
| 9 | 2.21 | 2.88 | −2.50 | 0.13 | 19 | 1.72 | 0.59 | −2.14 | 0.25 |
| 10 | 4.28 | 2.87 | −3.20 | 0.13 | 20 | 2.49 | 0.31 | −2.59 | 0.30 |
| Green | Dip Direction (°) | Dip Angle (°) | Space (m) | Green | Dip Direction (°) | Dip Angle (°) | Space (m) | ||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 328.28 | 60.63 | / | 11 | 321.52 | 47.58 | 1.360 | ||
| 2 | 328.23 | 40.68 | 0.136 | 12 | 318.32 | 54.07 | 0.196 | ||
| 3 | 324.57 | 67.11 | 0.254 | 13 | 336.17 | 39.72 | 0.404 | ||
| 4 | 327.33 | 53.79 | 0.185 | 14 | 326.05 | 47.69 | 0.336 | ||
| 5 | 337.98 | 31.44 | 0.464 | 15 | 327.32 | 31.20 | 0.327 | ||
| 6 | 333.64 | 43.94 | 0.086 | 16 | 320.49 | 43.09 | 0.457 | ||
| 7 | 324.39 | 46.39 | 0.958 | 17 | 344.53 | 49.00 | 0.378 | ||
| 8 | 342.06 | 47.51 | 0.729 | 18 | 334.95 | 49.63 | 0.125 | ||
| 9 | 327.51 | 45.86 | 0.893 | 19 | 331.65 | 43.20 | 0.116 | ||
| 10 | 328.69 | 46.88 | 0.565 | 20 | 332.63 | 58.87 | 0.341 | ||
| Blue | Dip Direction () | Dip Angle () | Space (m) | Blue | Dip Direction () | Dip Angle () | Space (m) | ||
| 1 | 163.04 | 31.08 | / | / | / | / | / | ||
| Green | Midpoint Coordinates of Trace (m) | Trace Length (m) | Green | Midpoint Coordinates of Trace (m) | Trace Length (m) | ||||
| 1 | 3.10 | 4.68 | −2.90 | 0.08 | 11 | 4.69 | 2.43 | −3.39 | 0.07 |
| 2 | 4.11 | 4.44 | −3.13 | 0.12 | 12 | 1.10 | 2.07 | −1.94 | 0.04 |
| 3 | 2.80 | 4.43 | −2.83 | 0.08 | 13 | 4.30 | 1.94 | −3.18 | 0.07 |
| 4 | 2.73 | 4.16 | −2.67 | 0.05 | 14 | 0.97 | 1.72 | −1.86 | 0.15 |
| 5 | 1.22 | 3.82 | −2.02 | 0.12 | 15 | 4.00 | 1.57 | −3.06 | 0.10 |
| 6 | 2.61 | 3.75 | −2.60 | 0.07 | 16 | 4.59 | 1.70 | −3.24 | 0.17 |
| 7 | 1.05 | 3.18 | −2.01 | 0.06 | 17 | 4.87 | 1.13 | −3.29 | 0.05 |
| 8 | 3.05 | 3.36 | −2.69 | 0.12 | 18 | 2.61 | 0.89 | −2.72 | 0.06 |
| 9 | 2.07 | 3.03 | −2.43 | 0.05 | 19 | 4.05 | 0.80 | −3.00 | 0.06 |
| 10 | 1.02 | 2.73 | −1.83 | 0.09 | 20 | 1.76 | 0.41 | −2.08 | 0.05 |
| Blue | Midpoint Coordinates of Trace (m) | Trace Length (m) | Blue | Midpoint Coordinates of Trace (m) | Trace Length (m) | ||||
| 1 | 2.49 | 0.50 | −1.06 | 0.23 | / | / | / | ||
| Joint | Center Coordinates (m) | Dip Direction (°) | Dip Angle (°) | Joint | Center Coordinates (m) | Dip Direction (°) | Dip Angle (°) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | −4.47 | 5.00 | 5.40 | 90.47 | 59.69 | 11 | −3.92 | 5.51 | 1.36 | 92.16 | 50.47 |
| 2 | −4.22 | 5.43 | 4.79 | 89.55 | 63.62 | 12 | −3.87 | 4.65 | 3.98 | 96.88 | 58.54 |
| 3 | −4.20 | 5.47 | 3.74 | 87.92 | 57.87 | 13 | −3.87 | 5.23 | 1.93 | 100.86 | 59.01 |
| 4 | −4.16 | 5.27 | 5.76 | 95.80 | 54.56 | 14 | −3.86 | 4.78 | 5.27 | 103.55 | 68.60 |
| 5 | −4.15 | 4.51 | 3.93 | 91.33 | 57.09 | 15 | −3.85 | 2.75 | 5.57 | 89.60 | 66.55 |
| 6 | −4.06 | 5.02 | 6.12 | 92.39 | 50.63 | 16 | −3.85 | 4.82 | 3.39 | 93.29 | 58.57 |
| 7 | −4.02 | 5.33 | 2.66 | 90.55 | 53.66 | 17 | −3.84 | 3.89 | 3.29 | 91.77 | 52.41 |
| 8 | −4.01 | 4.33 | 4.46 | 83.70 | 63.06 | 18 | −3.81 | 4.94 | 2.17 | 92.88 | 54.89 |
| 9 | −3.93 | 4.22 | 2.21 | 105.99 | 66.68 | 19 | −3.76 | 4.75 | 4.67 | 96.35 | 54.97 |
| 10 | −3.93 | 4.96 | 5.03 | 90.95 | 60.39 | 20 | −3.76 | 3.71 | 3.85 | 87.65 | 54.30 |
| Layer | Starting Position (m) | Dip Direction (°) | Dip Angle (°) | Layer | Starting Position (m) | Dip Direction (°) | Dip Angle (°) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | −3.75 | 4.63 | 3.05 | 328.28 | 60.63 | 11 | −3.54 | 2.72 | 1.37 | 321.52 | 47.58 |
| 2 | −3.73 | 3.39 | 4.61 | 328.23 | 40.68 | 12 | −3.53 | 3.74 | 4.91 | 318.32 | 54.07 |
| 3 | −3.69 | 4.64 | 1.81 | 324.57 | 67.11 | 13 | −3.48 | 3.63 | 3.87 | 336.17 | 39.72 |
| 4 | −3.67 | 4.37 | 3.22 | 327.33 | 53.79 | 14 | −3.46 | 3.44 | 4.66 | 326.05 | 47.69 |
| 5 | −3.65 | 3.22 | 3.34 | 337.98 | 31.44 | 15 | −3.46 | 3.17 | 3.69 | 327.32 | 31.20 |
| 6 | −3.65 | 3.27 | 4.13 | 333.64 | 43.94 | 16 | −3.45 | 2.44 | 3.94 | 320.49 | 43.09 |
| 7 | −3.64 | 3.11 | 4.46 | 324.39 | 46.39 | 17 | −3.45 | 4.13 | 2.64 | 344.53 | 49.00 |
| 8 | −3.63 | 4.69 | 1.03 | 342.06 | 47.51 | 18 | −3.37 | 2.98 | 3.99 | 334.95 | 49.63 |
| 9 | −3.62 | 3.00 | 3.55 | 327.51 | 45.86 | 19 | −3.37 | 3.09 | 2.47 | 331.65 | 43.20 |
| 10 | −3.57 | 3.25 | 3.82 | 328.69 | 46.88 | 20 | −3.35 | 3.25 | 1.12 | 332.63 | 58.87 |
| Fault | Starting position (m) | Dip Direction () | Dip Angle () | Fault | Starting position (m) | Dip Direction () | Dip Angle () | ||||
| 1 | −2.46 | 1.66 | 2.96 | 163.04 | 31.08 | / | / | / | / | / | / |
| Number | Volume Proportion of Blocks at Five Different Scales (%) | Degree of Blockiness (%) | ||||
|---|---|---|---|---|---|---|
| B1 | B2 | B3 | B4 | B5 | ||
| K16 + 790.5 | 73.30 | 14.40 | 12.23 | 0.03 | 0 | 12.25 |
| K16 + 792.4 | 72.4 | 19.9 | 7.3 | 0.4 | 0 | 13.38 |
| K16 + 795.7 | 66.7 | 21.4 | 10.6 | 1.3 | 0 | 8.86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Qi, R.; Zhang, P. Deterministic Discrete Fracture Network Model and Its Application in Rock Mass Engineering. Appl. Sci. 2025, 15, 6264. https://doi.org/10.3390/app15116264
Guo S, Qi R, Zhang P. Deterministic Discrete Fracture Network Model and Its Application in Rock Mass Engineering. Applied Sciences. 2025; 15(11):6264. https://doi.org/10.3390/app15116264
Chicago/Turabian StyleGuo, Shuangfeng, Runen Qi, and Peng Zhang. 2025. "Deterministic Discrete Fracture Network Model and Its Application in Rock Mass Engineering" Applied Sciences 15, no. 11: 6264. https://doi.org/10.3390/app15116264
APA StyleGuo, S., Qi, R., & Zhang, P. (2025). Deterministic Discrete Fracture Network Model and Its Application in Rock Mass Engineering. Applied Sciences, 15(11), 6264. https://doi.org/10.3390/app15116264