
Design of a Structural Health Monitoring System and Performance Evaluation for a Jacket Offshore Platform in East China Sea

Abstract
:1. Introduction
2. Design of a Structural Health Monitoring System for a Jacket Offshore Platform
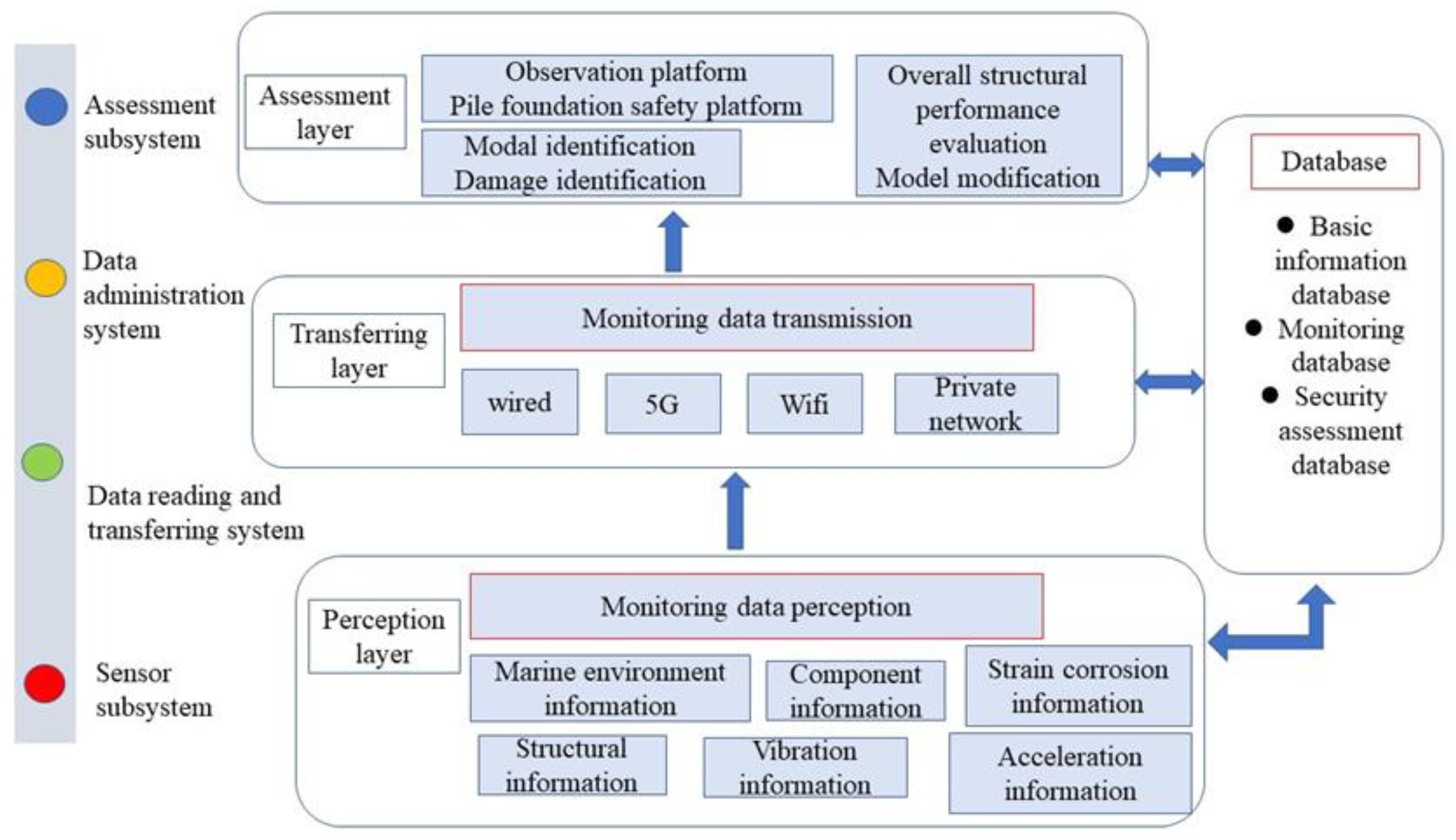
2.1. Monitoring System Composition
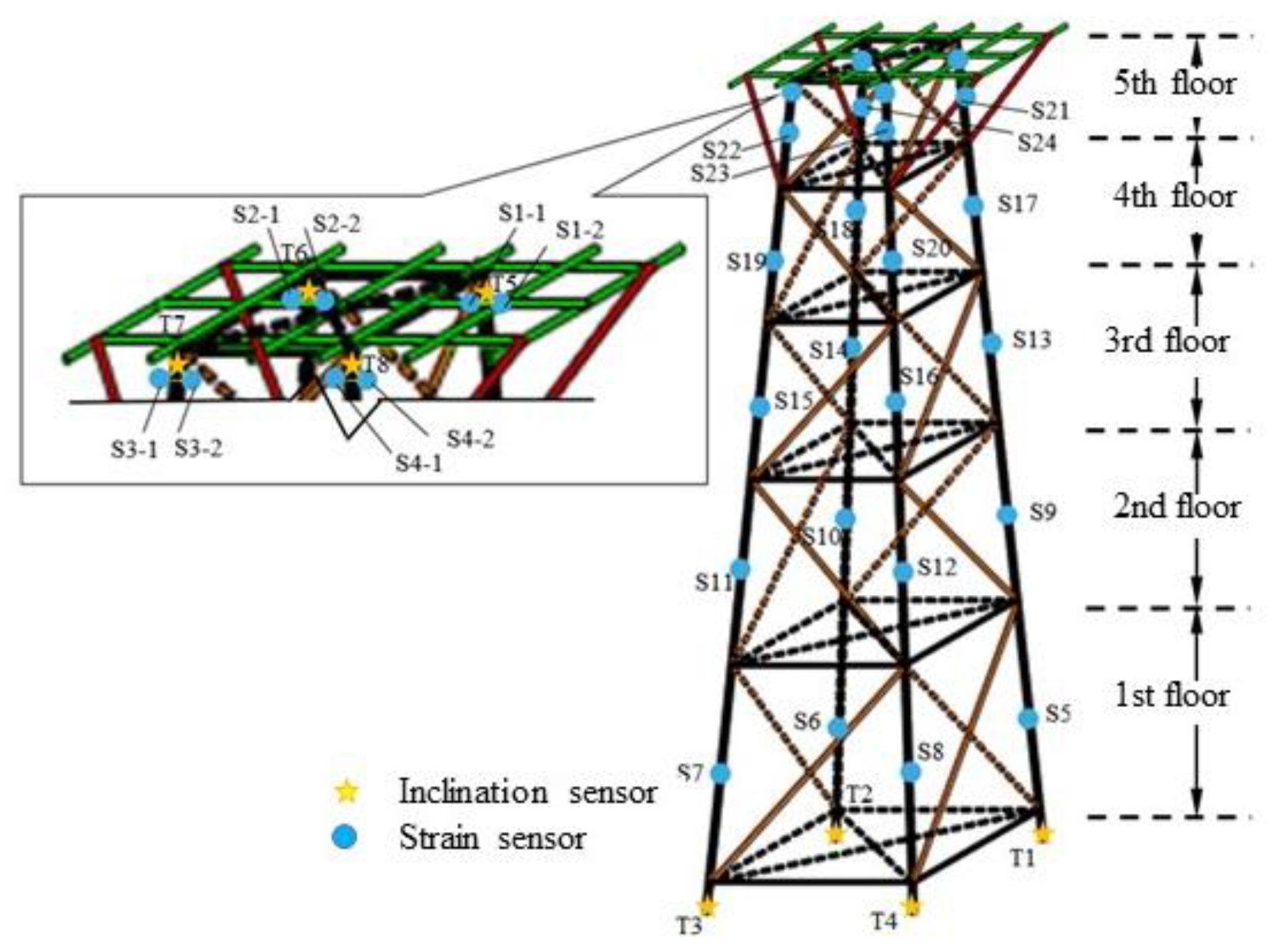
2.2. Sensor Subsystem
2.3. Assessment Subsystem
2.3.1. Safety Monitoring and Early Warning Evaluation Using Static Measurements
Platform Displacement Monitoring
Platform Tilt Monitoring
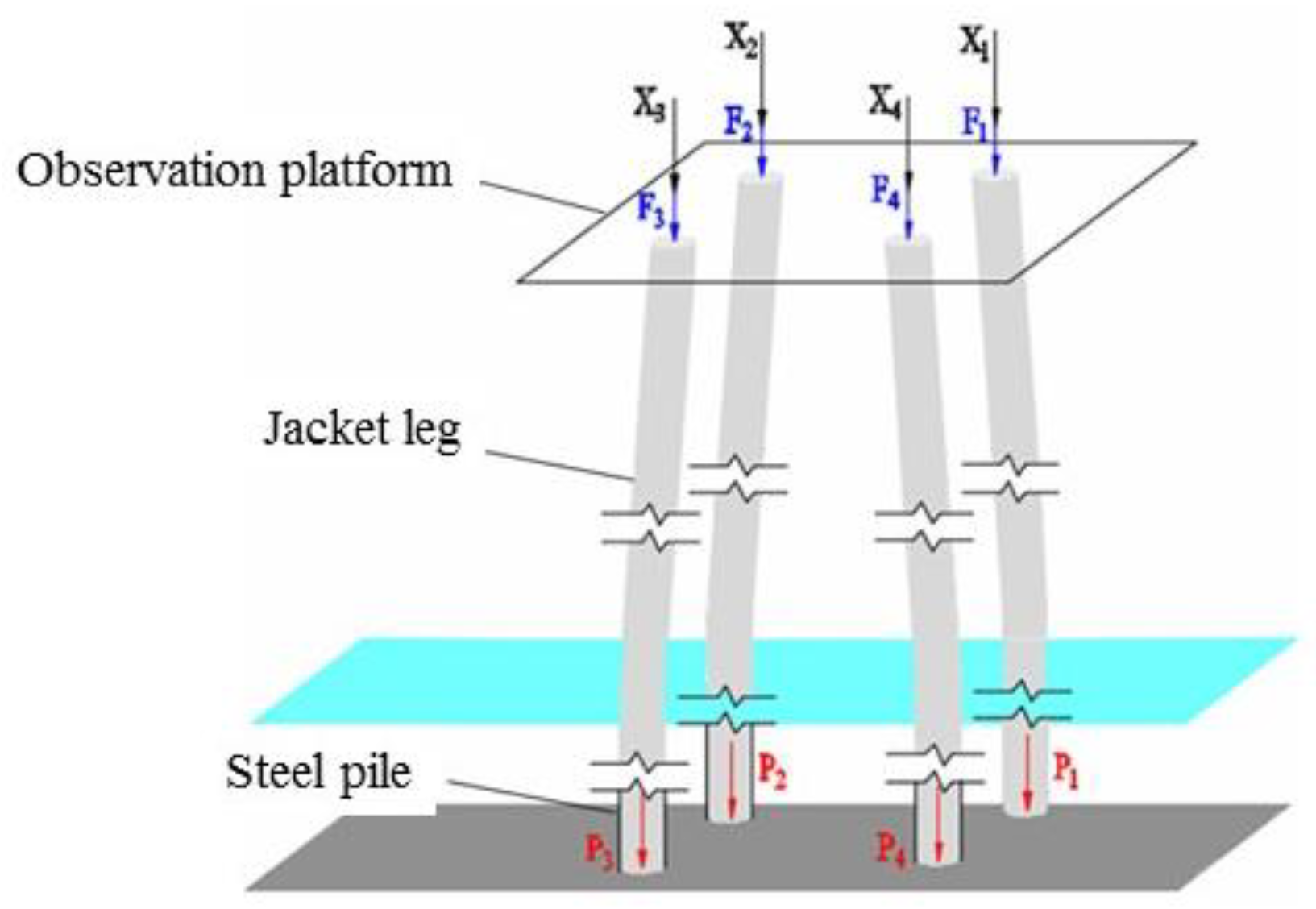
Pile Foundation Load Monitoring
2.3.2. Overall Performance Evaluation Based on Frequency Variation
2.3.3. Damage Identification Based on Strain Modal
3. Application to a Case Study
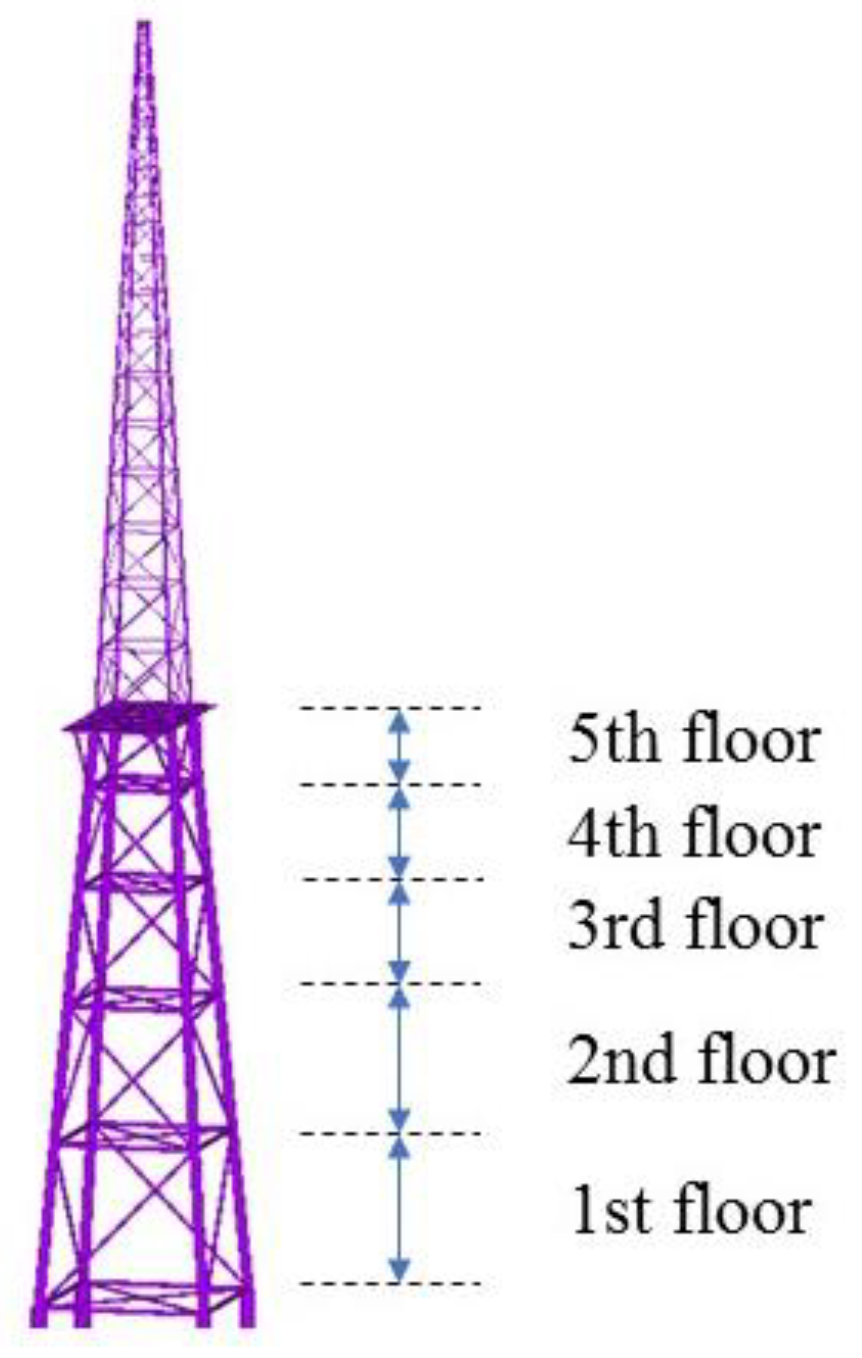
3.1. Monitoring Object
3.2. Establishment of Finite-Element Model
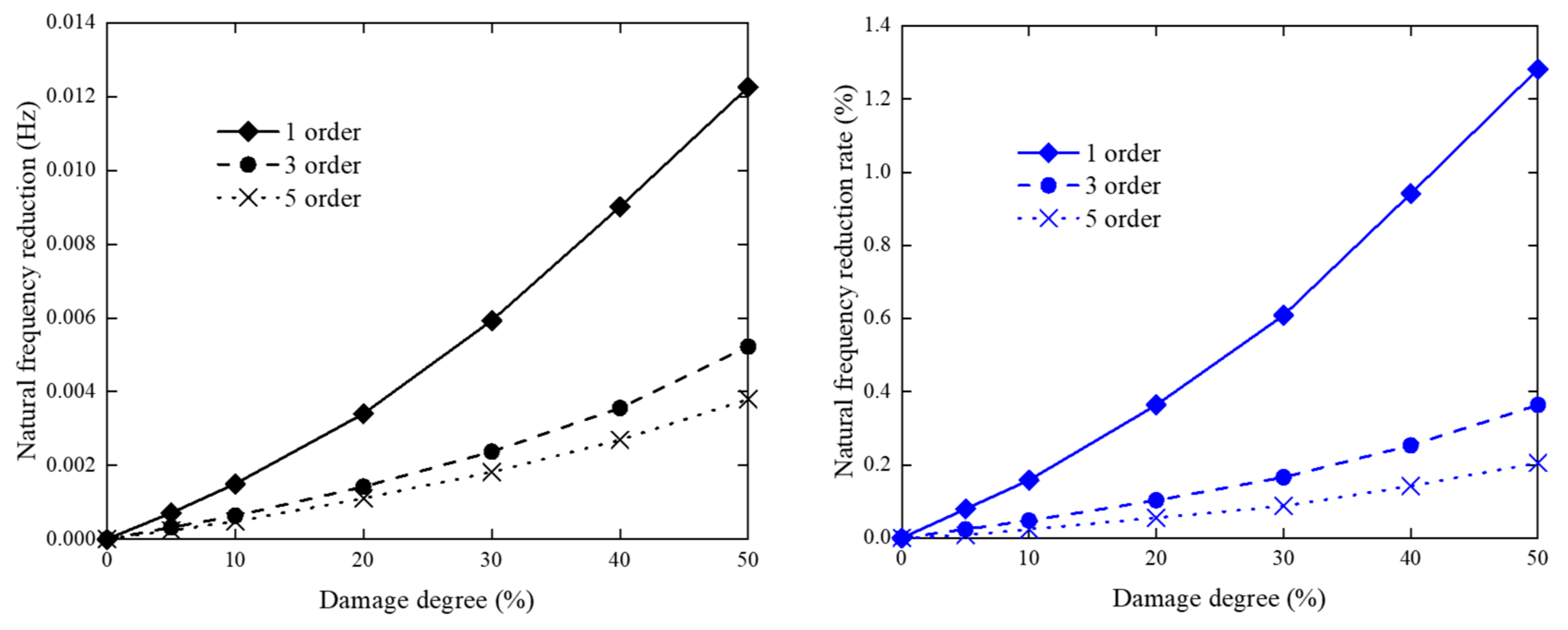
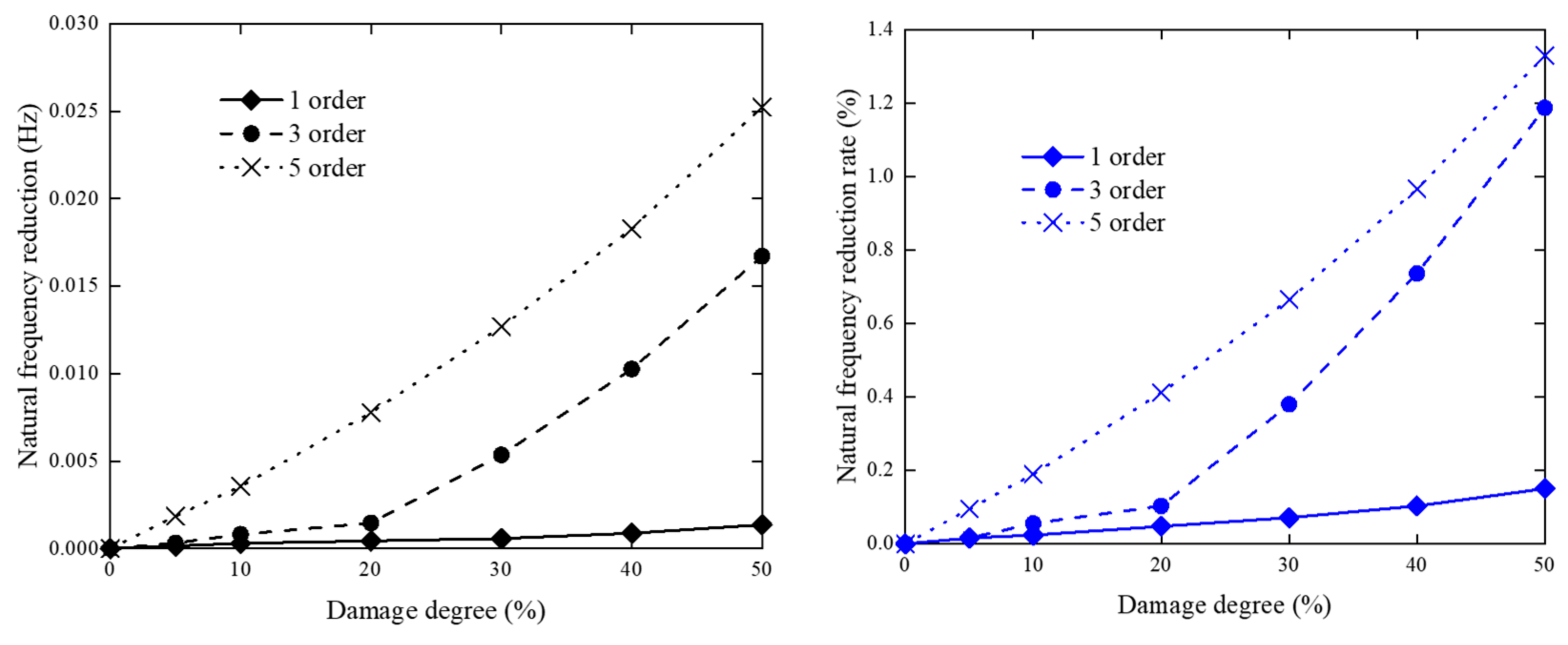
3.3. Overall Performance Evaluation Based on Frequency Variation
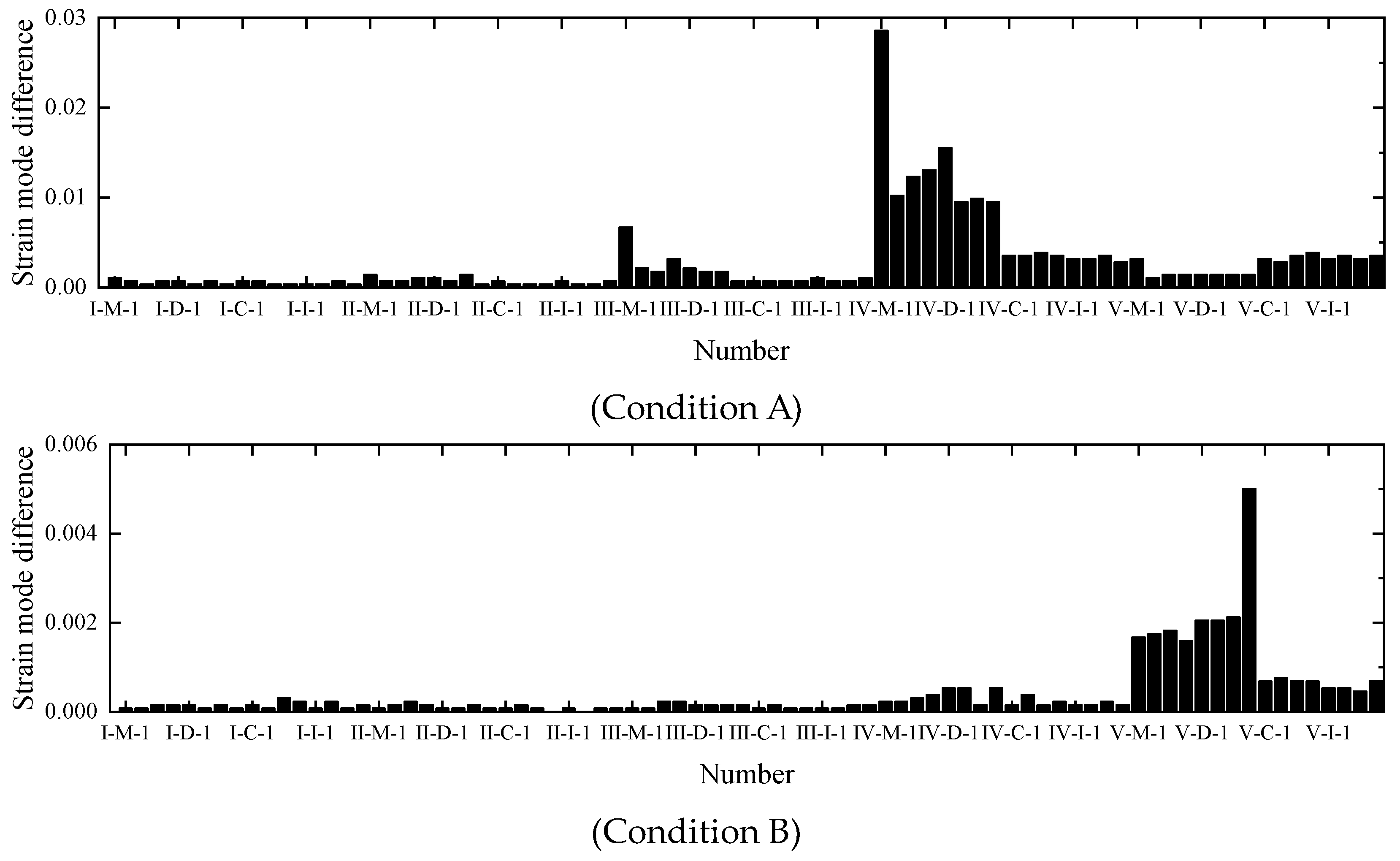
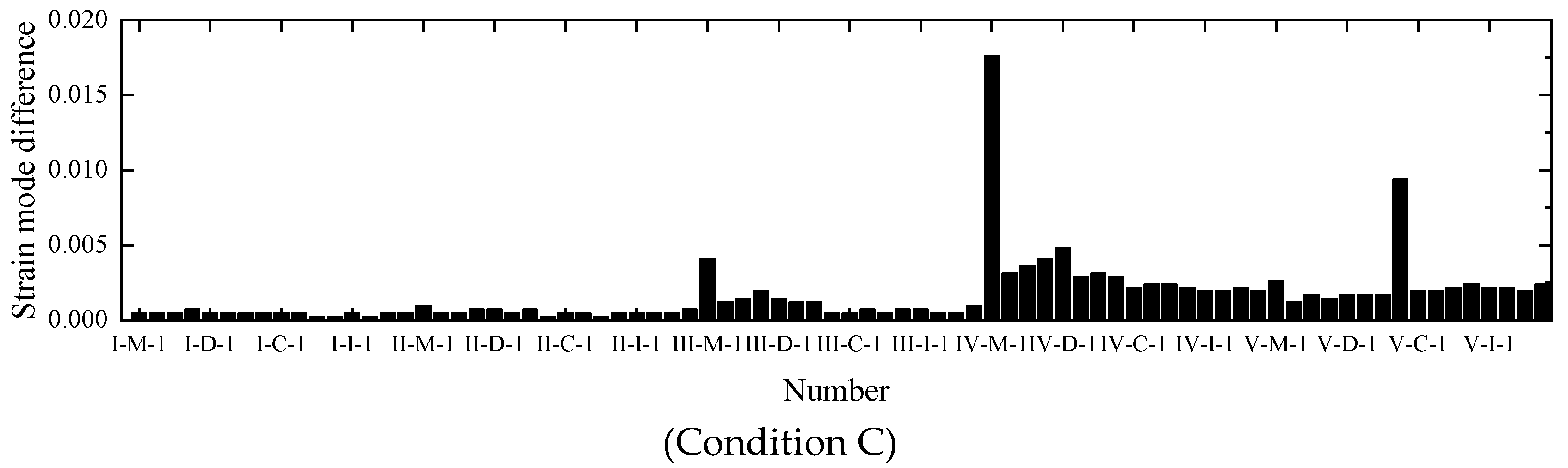
3.4. Damage Identification of the Case Based on Strain Modal
3.5. Analysis of the Factors Affecting the Health of an Offshore Platform Structure
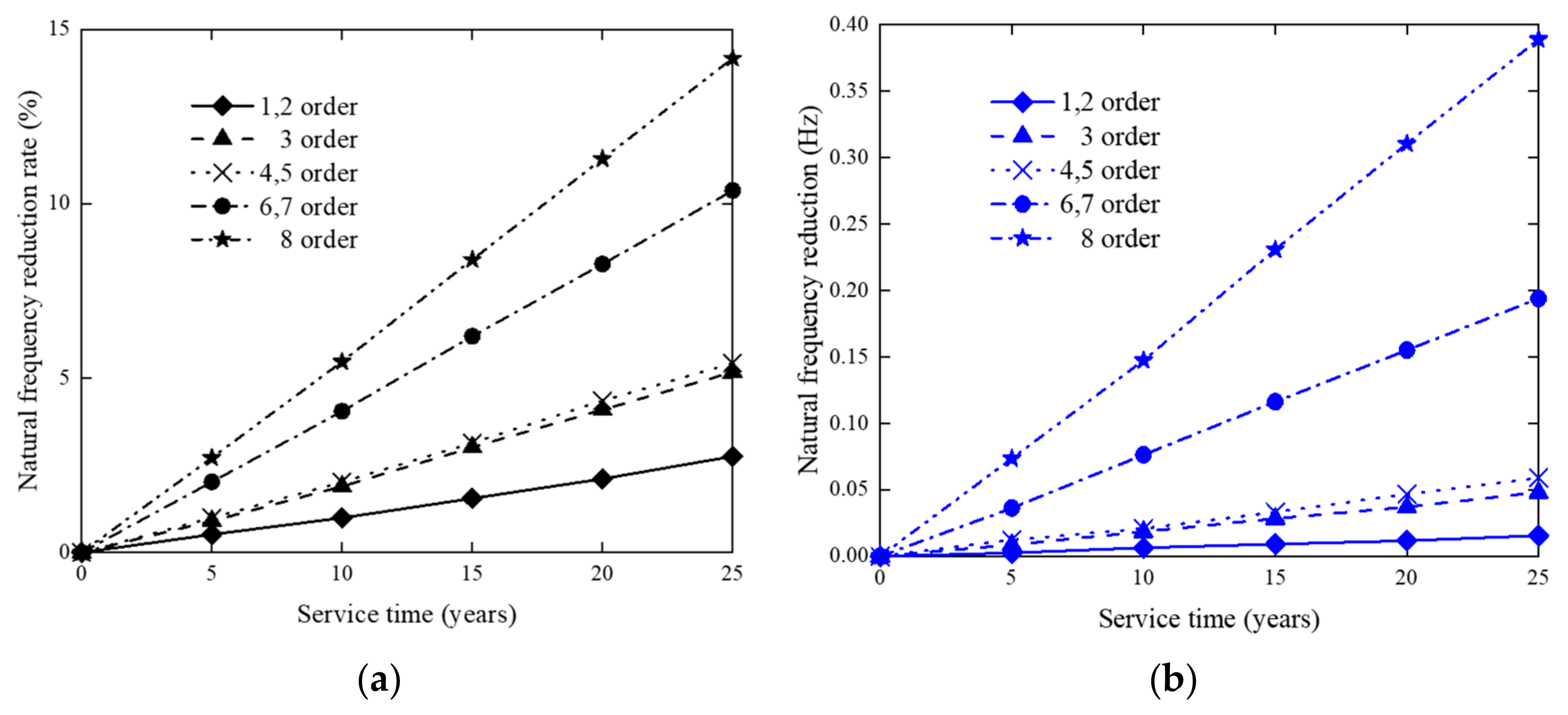
3.5.1. Scouring
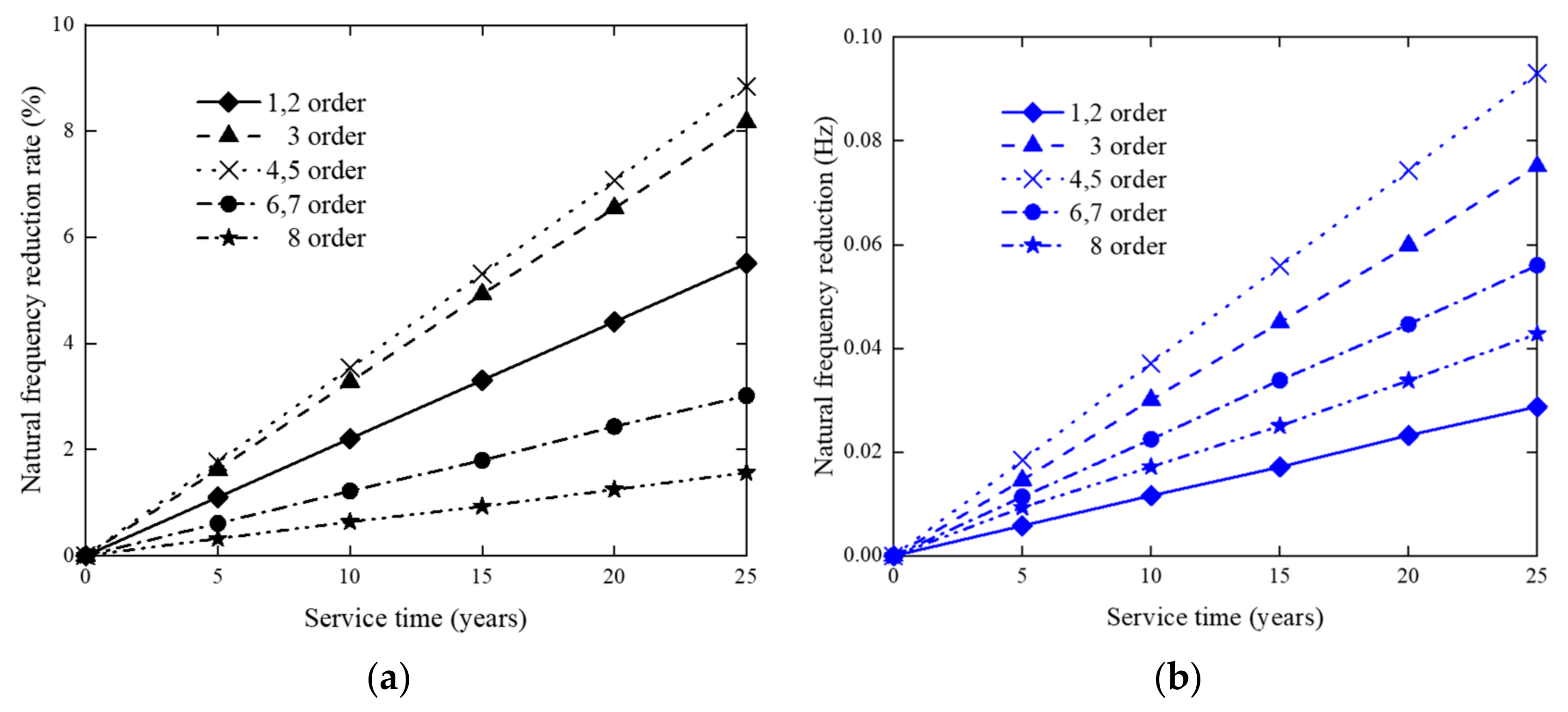
3.5.2. Corrosion
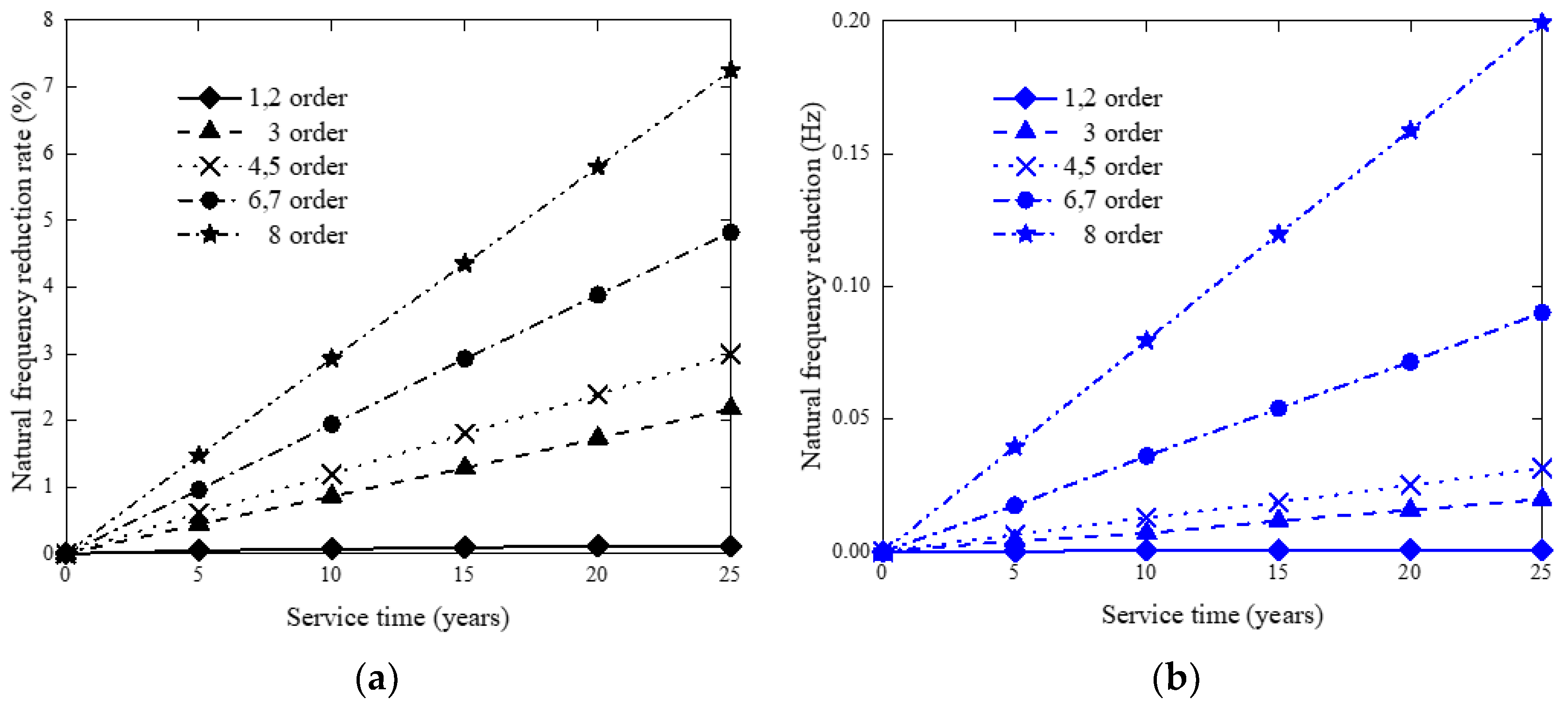
3.5.3. Marine Life Growth
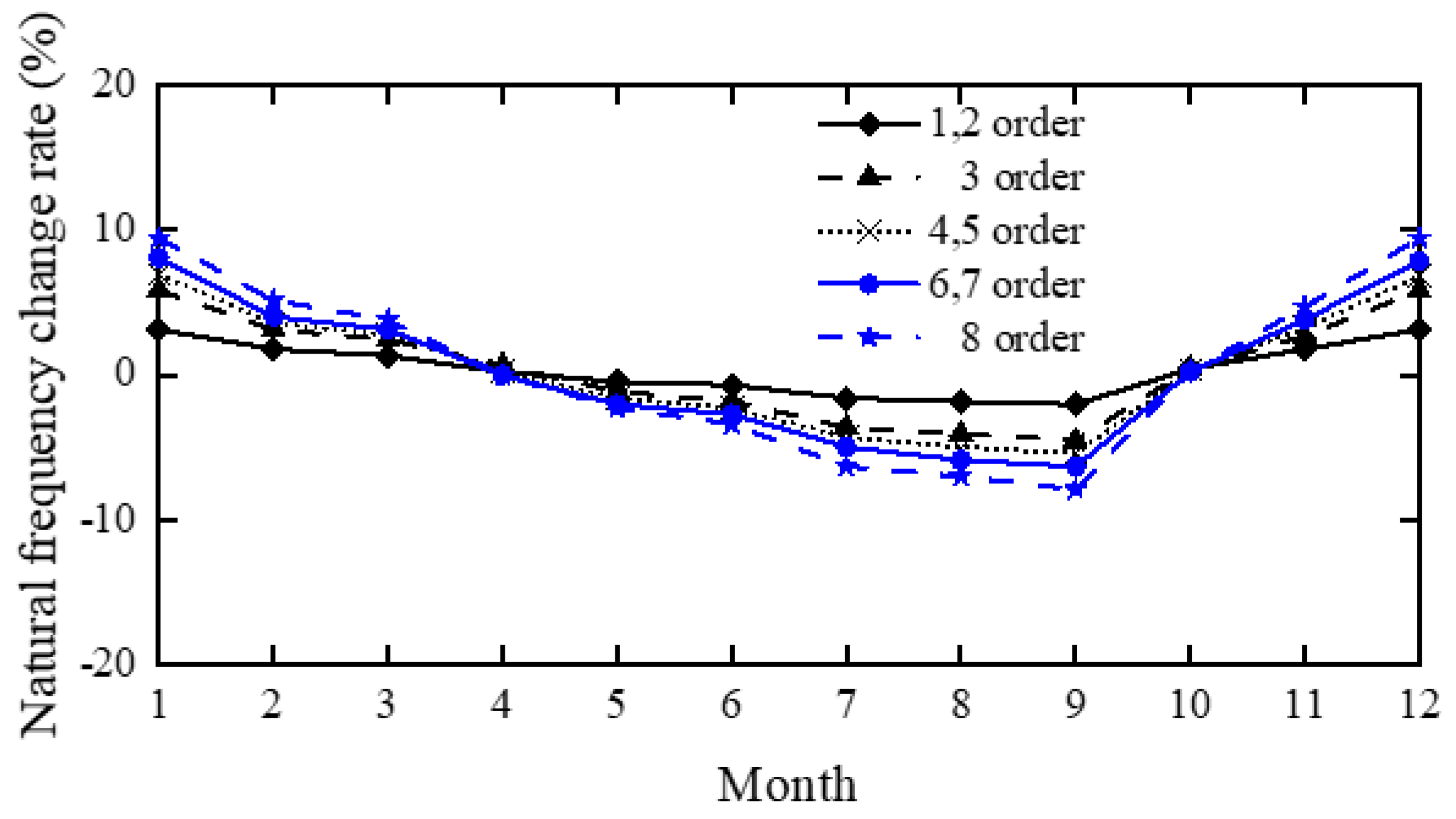
3.5.4. Temperature
4. Discussion and Conclusions
4.1. Discussion
4.2. Conclusions
- According to the overall framework of the sensor subsystem, data reading and transferring subsystem, data administration subsystem, and assessment subsystem, a SHM system for jacket offshore platform under construction was designed.
- A method for safety monitoring and early warnings for an offshore platform based on static tests of the platform displacement, inclination, and loads of pile was presented.
- Overall performance evaluation based on frequency variation and damage identification based on strain modal using strain monitoring of platform was presented.
- Taking an offshore platform in the East China Sea as an numerical case study, the application of the SHM system was discussed, which verifies its feasibility. At last, variation in the natural frequency of the model under the influence of scouring, corrosion, the growth of marine organisms, and temperature variations was quantitatively analyzed. The main factors causing frequency variations in different months of a given year and the same month in different years were obtained.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wisch, D.J. Fixed steel offshore structure design-past, present & future. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 20 May 1998; pp. 317–340. [Google Scholar]
- Nichols, J.M. Structural health monitoring of offshore structures using ambient excitation. Appl. Ocean Res. 2003, 25, 101–114. [Google Scholar] [CrossRef]
- Wang, S.Q.; Xu, M.Q. Modal strain energy-based structural damage identification: A review and comparative study. Struct. Eng. Int. 2019, 29, 234–248. [Google Scholar] [CrossRef]
- Wang, P.; Tian, X.L.; Peng, T.; Luo, Y. A review of the state-of-the-art developments in the field monitoring of offshore structures. Ocean Eng. 2018, 147, 148–164. [Google Scholar] [CrossRef]
- Liu, F.S.; Li, H.J.; Li, W. Experiment study of improved modal strain energy method for damage localization in jacket-type offshore wind turbines. Renew. Energy 2014, 72, 174–181. [Google Scholar] [CrossRef]
- Li, Y.C.; Wang, S.H.; Zhang, M. An improved modal strain energy method for damage detection in offshore platform structures. J. Mar. Sci. Appl. 2016, 15, 182–192. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, C.B.; Yu, L.N.; Lian, S.D.; Ye, Z. Dynamic monitoring of an offshore jacket platform based on RTK-GNSS measurement by CF-CEEMDAN method. Appl. Ocean Res. 2021, 115, 102844. [Google Scholar] [CrossRef]
- Haeri, M.H.; Lotfi, A.; Dolatshahi, K.M.; Golafshani, A.A. Inverse vibration technique for structural health monitoring of offshore jacket platforms. Appl. Ocean Res. 2017, 62, 181–198. [Google Scholar] [CrossRef]
- Liu, G.J.; Zhai, Y.Z.; Leng, D.X.; Tian, X.J.; Mu, W.W. Research on structural damage detection of offshore platforms based on grouping modal strain energy. Ocean Eng. 2017, 140, 43–49. [Google Scholar] [CrossRef]
- Liu, F.S.; Gao, S.J.; Han, H.W.; Tian, Z.; Liu, P. Interference reduction of high-energy noise for modal parameter identification of offshore wind turbines based on iterative signal extraction. Ocean Eng. 2019, 183, 372–383. [Google Scholar] [CrossRef]
- Mojtahedi, A.; Lotfollahi Yaghin, M.A.; Hassanzadeh, Y.; Ettefagh, M.M.; Aminfar, M.H.; Aghdam, A.B. Developing a robust SHM method for offshore jacket platform using model updating and fuzzy logic system. Appl. Ocean Res. 2011, 33, 398–411. [Google Scholar] [CrossRef]
- Tang, D.; Chen, J.; Wu, W.H.; Jin, L.Y.; Yue, Q.J.; Xie, B.; Wang, S.S.; Feng, J.G. Research on sampling rate selection of sensors in offshore platform shm based on vibration. Appl. Ocean Res. 2020, 101, 102192. [Google Scholar] [CrossRef]
- Wang, S.Q.; Li, Y.C.; Li, H.J. Structural model updating of an offshore platform using the cross model cross mode method: An experimental study. Ocean Eng. 2015, 97, 57–64. [Google Scholar] [CrossRef]
- Hosseinlou, F.; Mojtahedi, A. Developing a robust simplified method for structural integrity monitoring of offshore jacket-type platform using recorded dynamic responses. Appl. Ocean Res. 2016, 56, 107–118. [Google Scholar] [CrossRef]
- Hosseinlou, F.; Mojtahedi, A.; Ali, M.; Yaghin, L. Developing a SIM strategy for offshore jacket platforms based on the FE model updating and a novel simplified method. Ocean Eng. 2017, 145, 158–176. [Google Scholar] [CrossRef]
- Fathi, F.; Esfandiari, A.; Fadavie, M.; Mojtahedi, A. Damage detection in an offshore platform using incomplete noisy FRF data by a novel Bayesian model updating method. Ocean Eng. 2020, 217, 108023. [Google Scholar] [CrossRef]
- Li, W.; Huang, Y. A method for damage detection of a jacket platform under random wave excitations using cross correlation analysis and PCA-based method. Ocean Eng. 2020, 214, 107734. [Google Scholar] [CrossRef]
- Yang, S.; Xu, C.H.; Mi, J.Z.; Gu, S.Z. Dynamic Deformation Monitoring of Offshore Oil Platforms with Integrated GNSS and Accelerometer. Sustainability 2022, 14, 10521. [Google Scholar] [CrossRef]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Kiranyaz, S.; Hussein, M.; Gabbouj, M.; Inman, D.J. A review of vibration-based damage detection in civil structures: From traditional methods to Machine Learning and Deep Learning applications. Mech. Syst. Signal Process. 2021, 147, 107077. [Google Scholar] [CrossRef]
- Mangal, L.; Idichandy, V.G.; Ganapathy, C. ART-based multiple neural networks for monitoring offshore platforms. Appl. Ocean Res. 1996, 18, 137–143. [Google Scholar] [CrossRef]
- Wang, X.M.; Koh, C.G.; Zhang, J. Substructural identification of jack-up platform in time and frequency domains. Appl. Ocean Res. 2014, 44, 53–62. [Google Scholar] [CrossRef]
- Zhou, L.; Huang, P.X.; Chi, S.K.; Li, M.; Zhou, H.; Yu, H.B.; Cao, H.D.; Chen, K. Structural health monitoring of offshore wind power structures based on genetic algorithm optimization and uncertain analytic hierarchy process. Ocean Eng. 2020, 218, 108201. [Google Scholar] [CrossRef]
- Yang, R.Y.; Singh, S.K.; Tavakkoli, M. CNN-LSTM deep learning architecture for computer vision-based modal frequency detection. Mech. Syst. Signal Process. 2020, 144, 106885. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Miyamori, Y.; Mikami, S. Vibration-based structural state identification by a 1-dimensional convolutional neural network. Comp. Aid. Civ. Infrastruct. Eng. 2019, 34, 822–839. [Google Scholar] [CrossRef]
- Bao, X.X.; Wang, Z.C.; Iglesias, G. Damage detection for offshore structures using long and short-term memory networks and random decrement technique. Ocean Eng. 2021, 235, 109388. [Google Scholar] [CrossRef]
- BahooToroody, F.; Khalaj, S.; Leoni, L.; De Carlo, F.; Di Bona, G.; Forcina, A. Reliability estimation of reinforced slopes to prioritize maintenance actions. Int. J. Environ. Res. Public Health 2021, 18, 373. [Google Scholar] [CrossRef]
- Xu, Q.; Wu, Z.; Wang, X.; Li, Z. Research and application of structural monitoring and early warning conditions for aging jacket platforms. China Offshore Oil Gas 2015, 27, 102–108. [Google Scholar]
- Tian, H.; Li, H. Technology of jacket leveling in relatively deep water. Shipbuild. China 2013, 54 (Suppl. 1), 136–140. (In Chinese) [Google Scholar]
- Li, Z. Design of Wireless Low-Frequency Vibration Inspection System for Offshore Platform. Master’s Thesis, Dalian University of Technology, Dalian, China, 2011. (In Chinese). [Google Scholar]
- American Petroleum Institute. Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms; API RP 2A; API: New York, NY, USA, 2004. [Google Scholar]
- Ye, H.L.; Liu, L.; Qi, W.H. Research on anti-noise ability of offshore platform health monitoring system based on strain modal structural damage identification. J. Phys. Conf. Ser. 2022, 2185, 012067. [Google Scholar] [CrossRef]
- Bao, X.X.; Fan, T.X.; Shi, C.; Yang, G.L. One-dimensional convolutional neural network for damage detection of jacket-type offshore platforms. Ocean Eng. 2021, 219, 108293. [Google Scholar] [CrossRef]
- Dan, Z.Y.; Chai, Y.; Li, G.Q.; Tong, G.S. Manual of Steel Structure Design; China Building Industry Press: Beijing, China, 2018. (In Chinese) [Google Scholar]
- Zhou, S.; Zhu, H.H.; Ju, J.W.; Yan, Z.G.; Chen, Q. Modeling microcapsule-enabled self-healing cementitious composite materials using discrete element method. Int. J. Damage Mech. 2017, 26, 340–357. [Google Scholar] [CrossRef]
- Zhou, S.; Wang, C.; Ju, J.W. A numerical chemo-micromechanical damage model of sulfate attack in cementitious materials. Int. J. Damage Mech. 2022, 31, 1613–1638. [Google Scholar] [CrossRef]
- Bisheh, H.; Luo, Y.; Rabczuk, T. Parametric Study of Hip Fracture Risk Using QCT-Based Finite Element Analysis. CMC Comput. Mater. Contin. 2022, 71, 1349–1369. [Google Scholar]
- Rostamian, R.; Silani, M.; Ziaei-Rad, S.; Busse, B.; Qwamizadeh, M.; Rabczuk, T. A finite element study on femoral locking compression plate design using genetic optimization method. J. Mech. Behav. Biomed. Mater. 2022, 131, 105202. [Google Scholar] [CrossRef]
- He, G.; Zhong, Z. Dynamic response analysis of offshore wind turbine systems with monopile foundation underground wind & wave loads. Electr. Power Constr. 2012, 33, 1–7. (In Chinese) [Google Scholar]
- Lin, X.; Wang, D. Damage identification of offshore platform considering corrosion and scour condition. Ocean Eng. 2017, 35, 21–28. (In Chinese) [Google Scholar]
- Xue, H.; Ji, C. Dynamic response study of jacket offshore platforms with corrosion under random wave loads. China Offshore Platf. 2015, 30, 85–90. (In Chinese) [Google Scholar]
- Li, Y.; Wang, B.; Xia, Y. Study on vibration characteristics of multi-pile structure of offshore wind turbine during operation period. Hydropower 2017, 43, 95–98+107. (In Chinese) [Google Scholar]
- Liu, K. Damage Detection to Offshore Platforms Based on Modal Strain Energy Method Considering the Temperature Influence. Master’s Thesis, Ocean University of China, Qingdao, China, 2011. (In Chinese). [Google Scholar]
- Li, H.; Zou, Z.; Su, M.; Zhang, K. A study of the influence of temperature changes on the structural modal parameters. Traffic Eng. Technol. Natl. Def. 2007, 1, 26–29. (In Chinese) [Google Scholar]
- Mojtahedi, A.; Hokmabady, H.; Yaghubzadeh, A.; Mohammadyzadeh, S. An improved model reduction-modal based method for model updating and health monitoring of an offshore jacket-type platform. Ocean Eng. 2020, 209, 107495. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Failure Form | Consequence | Risk Level | Warning Color |
|---|---|---|---|
| First member UC exceeds 1.05 | Local strength reduction | Class A | Blue |
| Local member UC exceeds 1.05 | Local failure | Class B | Orange |
| First node invalid | Overall structural failure | Class C | Red |
| Position | Description | Geometric Parameter | Material Parameters | ||
|---|---|---|---|---|---|
| Elasticity Modulus | Density | Poisson’ Ration | |||
| Jacket | Main Bar | Round steel pipe, diameter is 1.5 m, thickness is 0.06 m | 206 GPa | 7850 kg/m3 | 0.3 |
| Interlayer transverse bracing | Round steel pipe, diameter is 0.8 m, thickness is 0.04 m | ||||
| Diagonal bracing | Round steel pipe, diameter is 0.6 m, thickness is 0.025 m | ||||
| Internal bracing | Round steel pipe, diameter is 0.6 m, thickness is 0.025 m | ||||
| Observation platform | beam | Rectangular steel tube, width is 0.4 m, height is 0.4 m, thickness is 0.02 m | |||
| deck | thickness is 0.02 m | ||||
| Wind tower | Structure leg | Round steel pipe, diameter is 0.5 m, thickness is 0.02 m | |||
| Transverse bracing | Round steel pipe, diameter is 0.25 m, thickness is 0.01 m | ||||
| Diagonal bracing | Round steel pipe, diameter is 0.2 m, thickness is 0.0075 m | ||||
| 0.00 | 0.0 | 0.00 | 0.0 |
| 0.50 | 1.0 | 0.50 | 1.0 |
| 0.72 | 3.0 | 0.72 | 3.0 |
| 15.0 | 0.72 | ||
| Order | First | Second | Third | Fourth | Fifth |
|---|---|---|---|---|---|
| Frequency (Hz) | 0.524 | 0.525 | 0.918 | 1.053 | 1.054 |
| Order | sixth | seventh | eighth | ninth | tenth |
| Frequency (Hz) | 1.862 | 1.862 | 2.744 | 2.857 | 2.913 |
| Conditions | Stiffness Damage Degree | Location of Damaged Components |
|---|---|---|
| A (Single component damage) | 5%, 10%, 20%, 30%, 40%, 50% | Main pipe of Monitoring point s17 (4th floor) |
| B (Single component damage) | 5%, 10%, 20%, 30%, 40%, 50% | One of diagonal braces between 4th floor and 5th |
| C (Multi component damage) | 5%, 10%, 20%, 30%, 40%, 50% | Superposition of Condition A and Condition B |
| T (°C) | 0 | 5 | 10 |
|---|---|---|---|
| E (105 MPa) | 2.07 | 2.065 | 2.06 |
| T (°C) | 15 | 20 | 25 |
| E (105 MPa) | 2.055 | 2.05 | 2.045 |
| Month | 3 | 7 | 9 | 12 | |
|---|---|---|---|---|---|
| Temperature (°C) | 1st floor | 4 | 6 | 8 | 12 |
| 2st floor | 4 | 10 | 13 | 10 | |
| 3st floor | 4 | 15 | 16 | 10 | |
| 4st floor | 4 | 20 | 18 | 10 | |
| 5st floor | 4 | 20 | 18 | 10 | |
| Frequency Variation (%) | Different Months of the Same Year | Same Month of Different Years | ||
|---|---|---|---|---|
| Lower Orders | Higher Orders | Lower Orders | Higher Orders | |
| <1% | T | T | M | N |
| 1–3% | T | T | M | C, M |
| 3–5% | T | T | S | M |
| >5% | N | T | C | M |
| >8% | N | N | C | C |
| >10% | N | N | N | S |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, H.; Jiang, C.; Zu, F.; Li, S. Design of a Structural Health Monitoring System and Performance Evaluation for a Jacket Offshore Platform in East China Sea. Appl. Sci. 2022, 12, 12021. https://doi.org/10.3390/app122312021
Ye H, Jiang C, Zu F, Li S. Design of a Structural Health Monitoring System and Performance Evaluation for a Jacket Offshore Platform in East China Sea. Applied Sciences. 2022; 12(23):12021. https://doi.org/10.3390/app122312021
Chicago/Turabian StyleYe, Hailin, Chuwei Jiang, Feng Zu, and Suzhen Li. 2022. "Design of a Structural Health Monitoring System and Performance Evaluation for a Jacket Offshore Platform in East China Sea" Applied Sciences 12, no. 23: 12021. https://doi.org/10.3390/app122312021
APA StyleYe, H., Jiang, C., Zu, F., & Li, S. (2022). Design of a Structural Health Monitoring System and Performance Evaluation for a Jacket Offshore Platform in East China Sea. Applied Sciences, 12(23), 12021. https://doi.org/10.3390/app122312021