3.2. Design of the Evaluation Model
Utilizing Lair, Bair, and Hair in the GPS/BD data of the carrier, cartesian coordinates Xair_CGCS, Yair_CGCS, and Zair_CGCS of the carrier in the CGCS2000 coordinate system were obtained via coordinate transformation.
Similarly, from Laim, Baim, and Haim in the GPS/BD data of the target aircraft, the cartesian coordinates Xaim_CGCS, Yaim_CGCS, and Zaim_CGCS of the target position in the CGCS2000 coordinate system were obtained.
Next, the position of the target in the launch coordinate system at moment tF, when the “simulated launch” instruction was issued by the carrier to the pod, was calculated. The launch coordinate system was defined with the launch point being origin OF. Furthermore, the OXF axis was in the horizontal plane crossing the origin and pointing to the north direction; meanwhile, the OYF axis was in the vertical plane of the OXF axis, perpendicular to the OXF axis, and the upward direction was assigned as positive. Additionally, the OZF axis complied with the right-hand rule to form the coordinate system with the two axes defined above.
Using the longitude Laim_radar, latitude Baim_radar, and altitude Haim_radar of the target aircraft measured by the airborne radar, the cartesian coordinates Xaim_radar_CGCS, Yaim_radar_CGCS, and Zaim_radar_CGCS of the target in the CGCS2000 system were obtained by coordinate transformation.
By using the output longitude
Lair_INS, latitude
Bair_INS, and altitude
Hair_INS of the main inertial navigation system of the carrier, its cartesian coordinates
Xair_INS_CSCS,
Yair_INS_CSCS, and
Zair_INS_CSCS in the CGCS2000 system were obtained by coordinate transformation. Then, the position measurement of the target aircraft in the launch coordinate system of the carrier could be calculated as follows:
The position error of the target aircraft measured by the airborne radar was then obtained.
Next, the spatial pitch angle
and course angle
of the line-of-sight vector between the carrier aircraft and target in the carrier’s launch coordinate system could be calculated utilizing the measurement data from the airborne radar. Consequently, the angle measurement error of the airborne radar could be acquired as follows:
Finally, the position and angle information of the target measured by the pod was compared to that measured by the airborne radar, and the accuracy of the measurement from the seeker to the target was obtained.
3.3. Experiments and Analyses
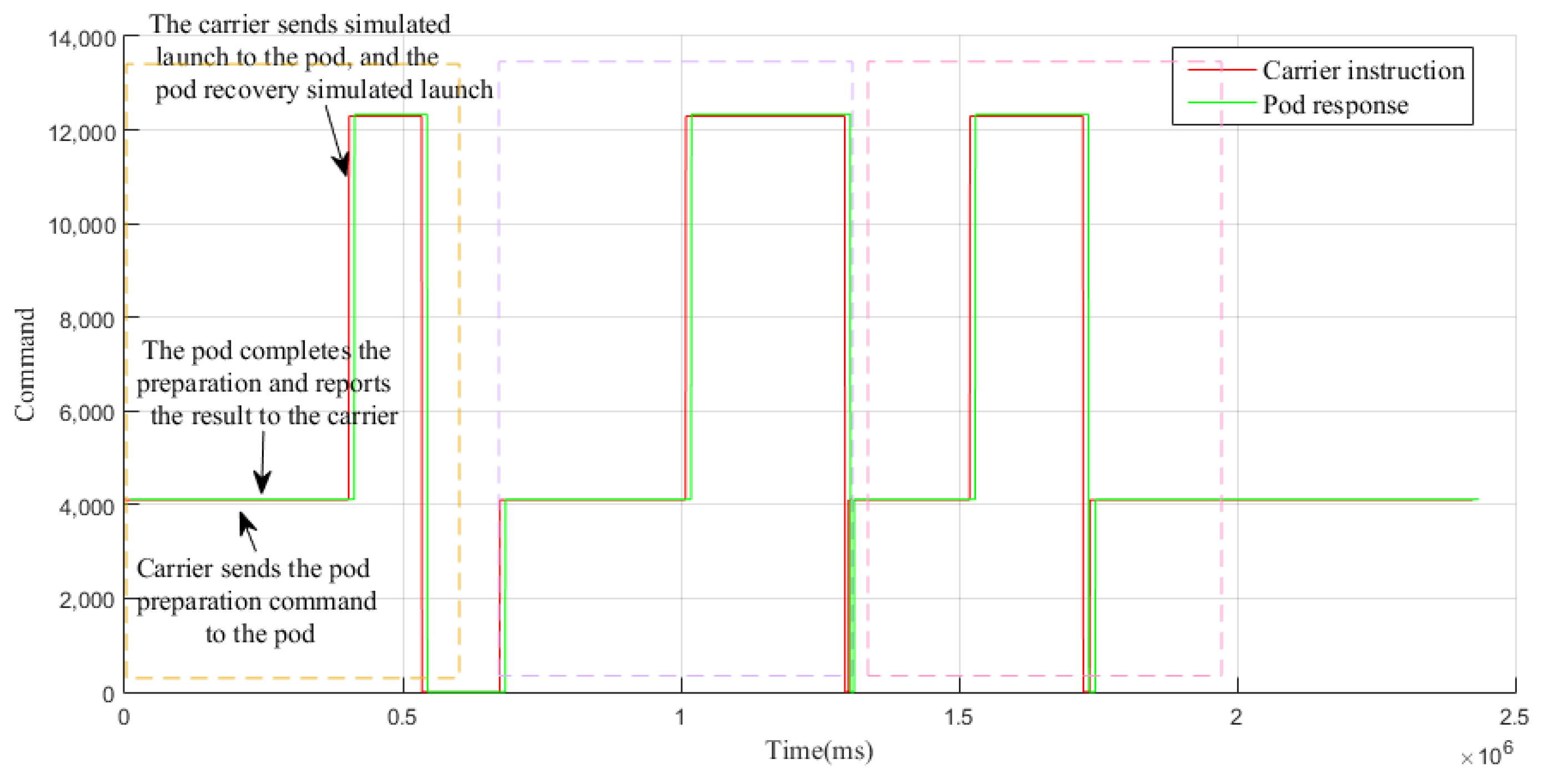
The simulation experiments were conducted with the implemented test system, and the obtained data were analyzed. As shown in
Figure 9, the test system accomplished three autonomous flight simulations of target tracking and interception with the pod. According to the designed workflow, the carrier sent the instructions “pod preparation”, “simulated launch”, and “not ready” one by one to the pod. The pod responded “self-inspection ok” to the carrier’s instruction “pod preparation”, as well as the instructions “simulated launch” and “cancel the simulated launch”. Hence, the execution process was followed appropriately. To facilitate data analysis, the interactive instructions and responses between the carrier aircraft and pod were considered as reference. The absolute numbers of the carrier’s instructions were adjusted for the convenience of visualization.
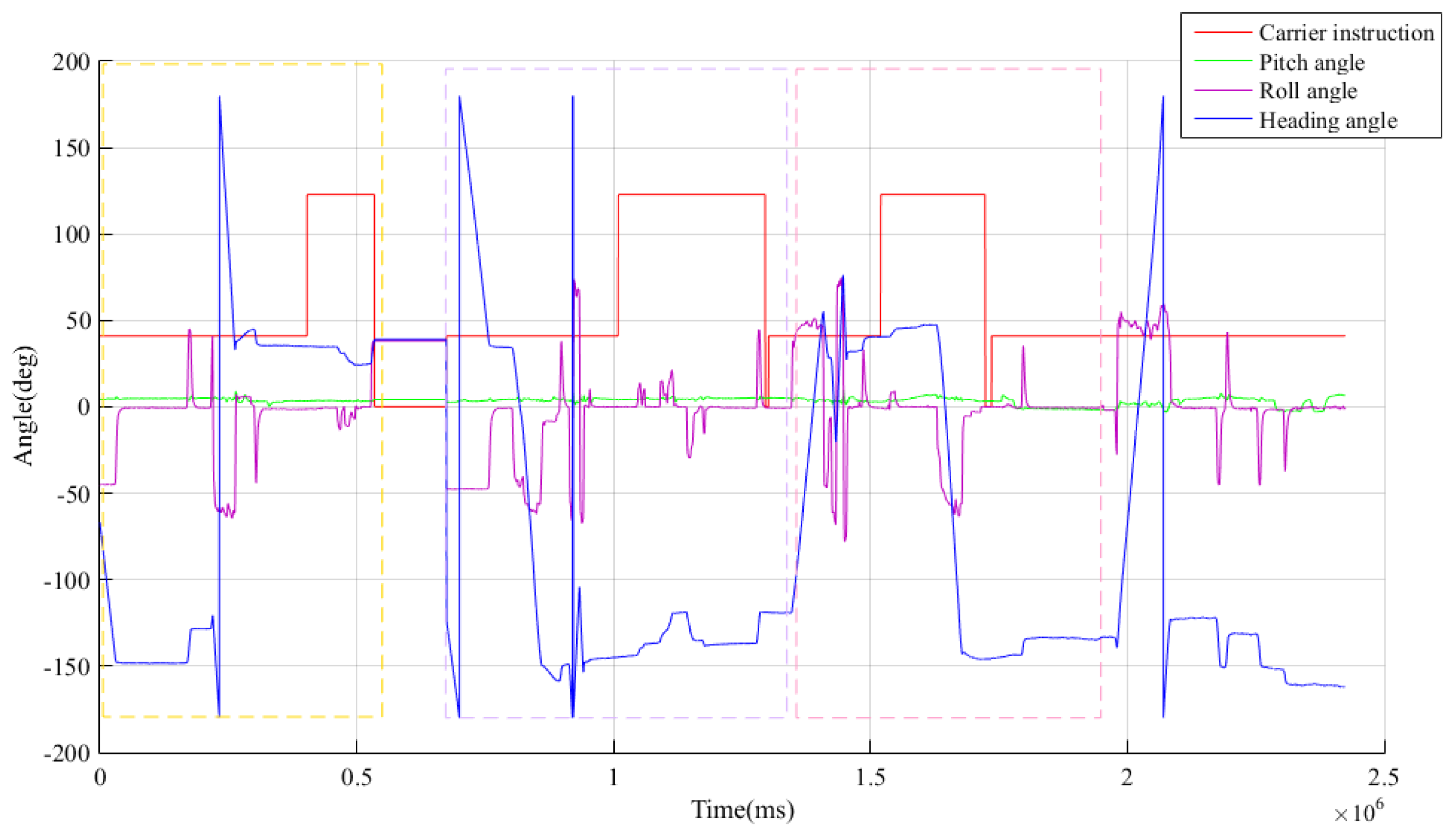
After issuing the “preparation” command, the carrier aircraft sent the initial information to the pod, including the longitude, latitude, altitude, carrier velocity X, carrier velocity Y, carrier velocity Z, pitch angle, heading angle, and roll angle, which were utilized by the pod to establish a navigation coordinate system to realize a simulated autonomous flight upon receiving the “simulated launch” command. To ensure the navigation accuracy of the pod during the handover from the midcourse to terminal guidance, the influence of wing deformation and installation error should be considered in the attitude data of the aircraft. The angle information issued by the carrier aircraft is shown in
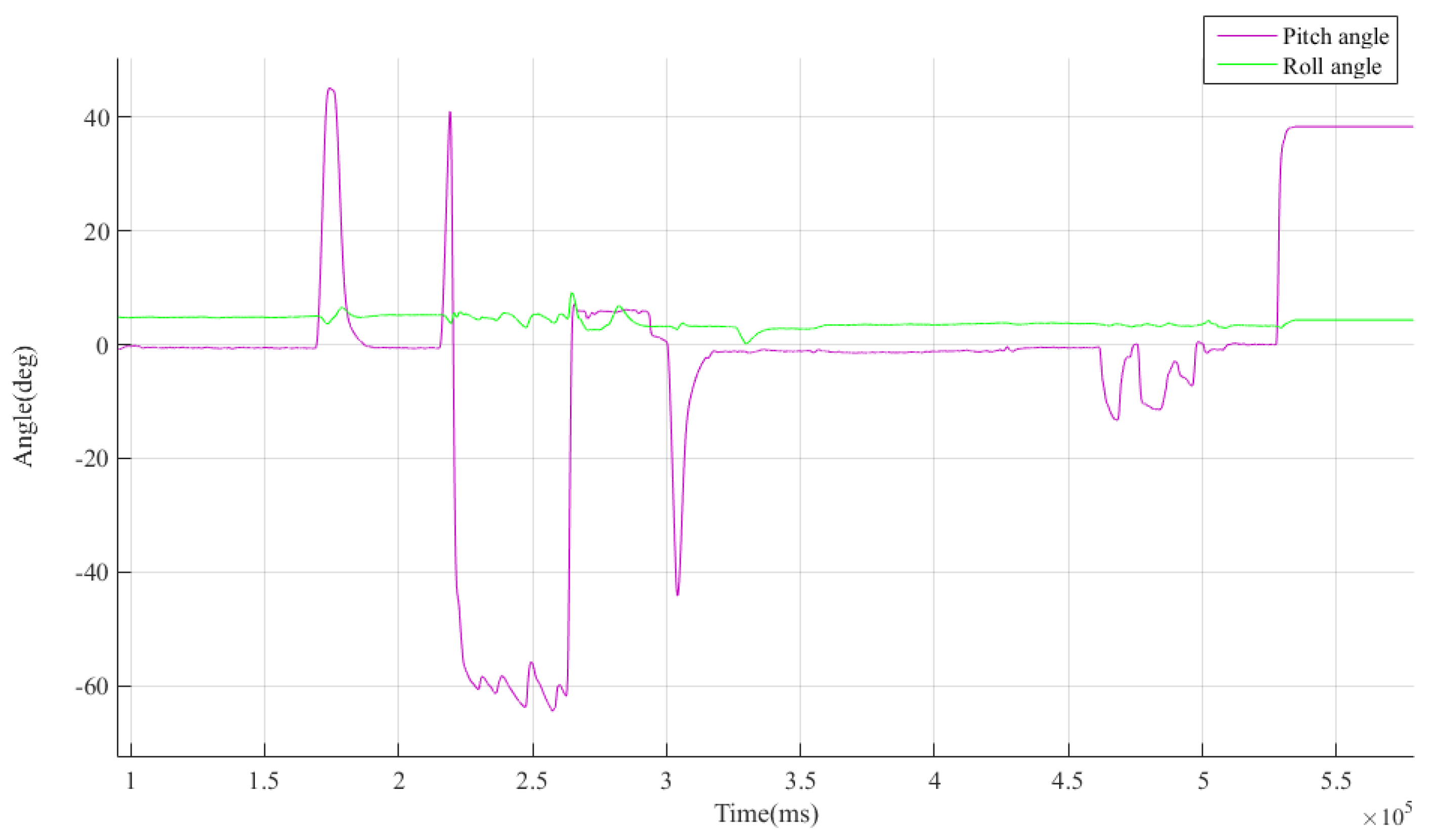
Figure 10, in which the data of the first simulated autonomous flight are enlarged and presented in
Figure 11. As shown in
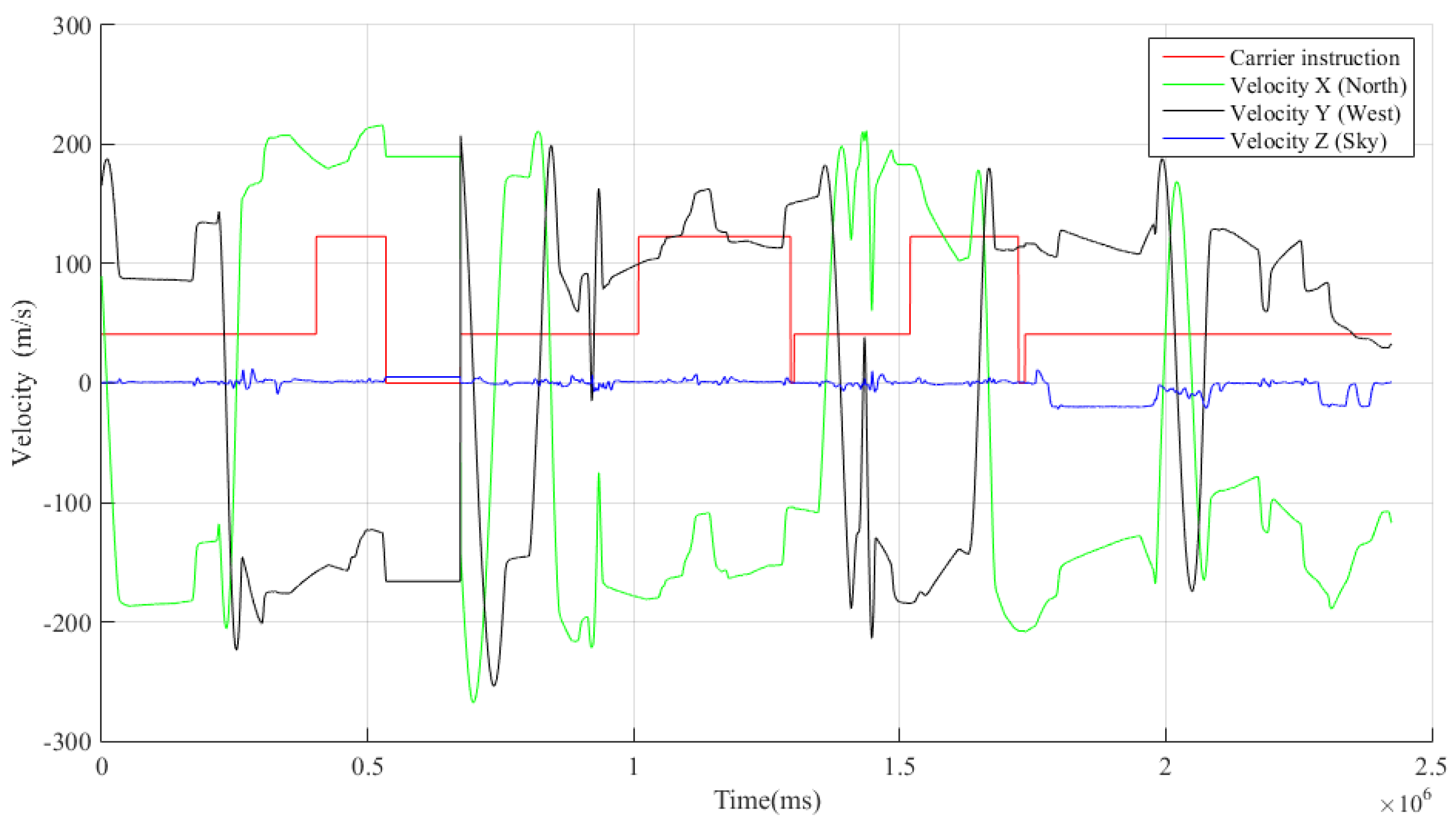
Figure 11, the pitch and roll angles of the carrier aircraft changed continuously during the preparation phase, and continuous “S”-shaped maneuvers were performed. The velocity information issued by the carrier to the pod is shown in
Figure 12. During the demonstrated continuous “S”-shaped maneuvers, the northward and westward velocity were considered as changing accordingly, while the skyward velocity did not exhibit obvious fluctuations, which is consistent with the actual characteristics of the flight mechanics of the carrier.
When the distance between the target and carrier was 14.95 km, the carrier sent information, such as the distance, with respect to the target intercepted by the airborne radar to the pod. As illustrated in
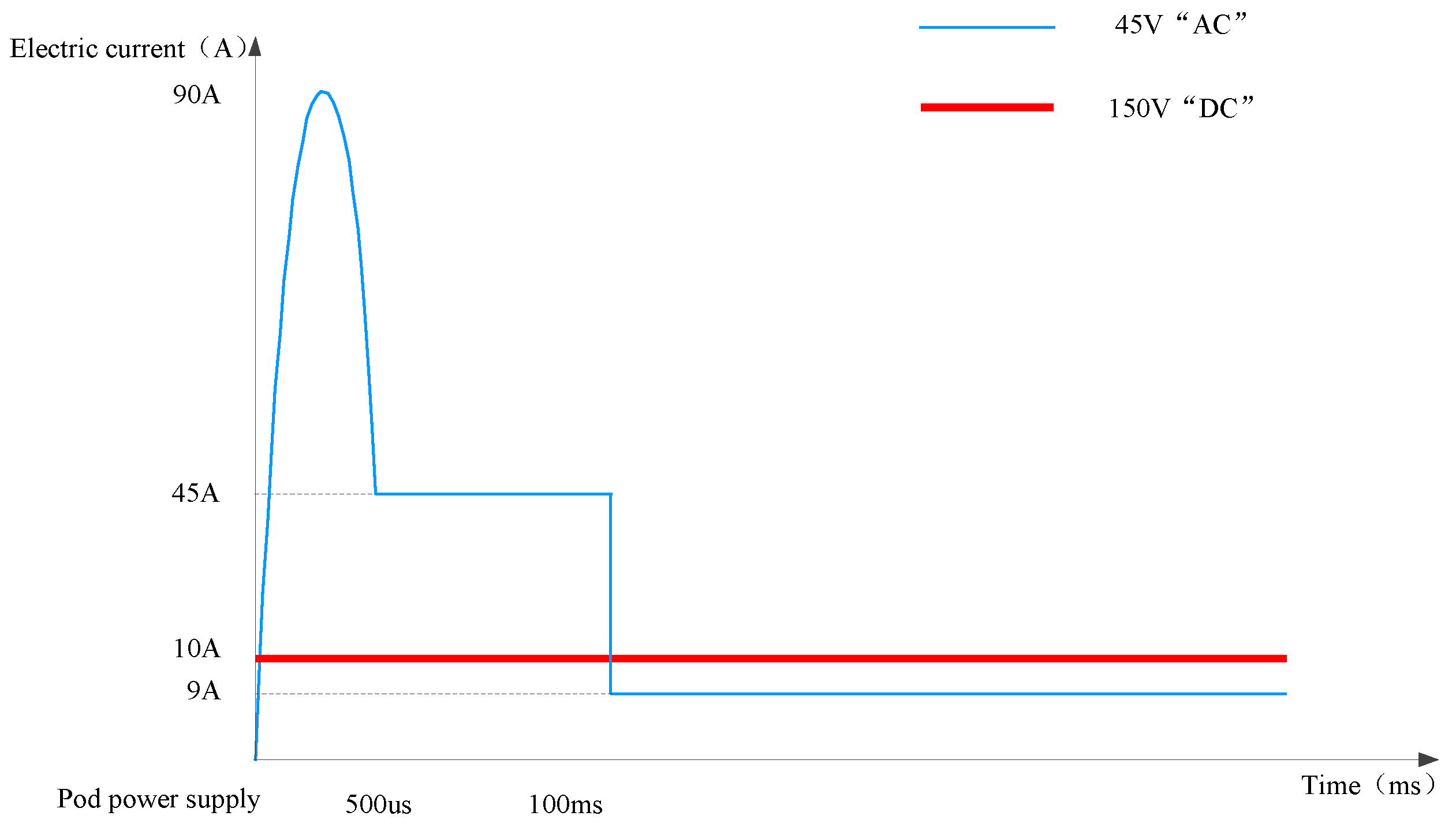
Figure 13, When the pod was 6.5 km away from the target, the battery provided a high-voltage power supply according to the predefined time sequence and transmitted the battery activation signal. As illustrated in
Figure 14, when the distances between the carrier and target aircraft were between 0.53 and 0.64 km, the target aircraft turned its flight direction and accelerated to deviate from the carrier.
The launch coordinate system was established based on the evaluation model presented in
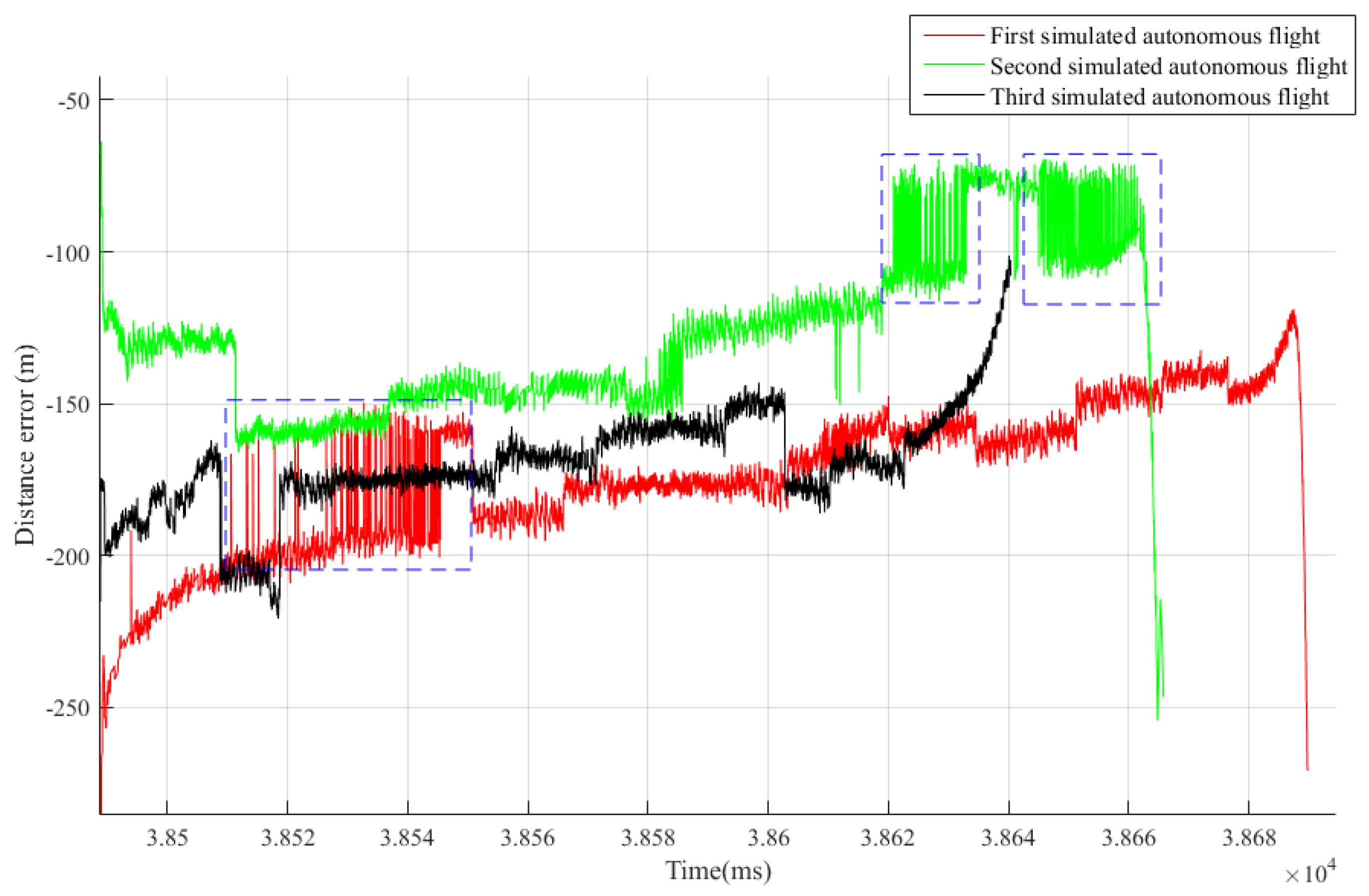
Section 3.2, whose origin was defined by the location of the pod at the moment when the carrier aircraft issued the “simulated launch” instruction. The actual and measured values of the relative location between the carrier and target aircrafts were obtained from Equations (1) and (2), respectively. Consequently, the distance error of the radar tracking and measuring the target in the launch coordinate system is shown in
Figure 15. When the target was approaching the airborne radar, starting from 14.95 km inward, the distance measurement error was observed as persistent. After the radar began to measure the target, the distance error converged rapidly, and the average compound spatial distance error was approximately 160 m. During the “S”-shaped maneuvers, the carrier aircraft produced more obvious fluctuations of the compound spatial distance error of approximately 50 m. With the proximity of the distance between the carrier and target, the distance error decreased gradually, and the line-of-sight angle between the carrier and target increased gradually until the airborne radar lost the target after producing a large distance error. Based on the evaluation model introduced in
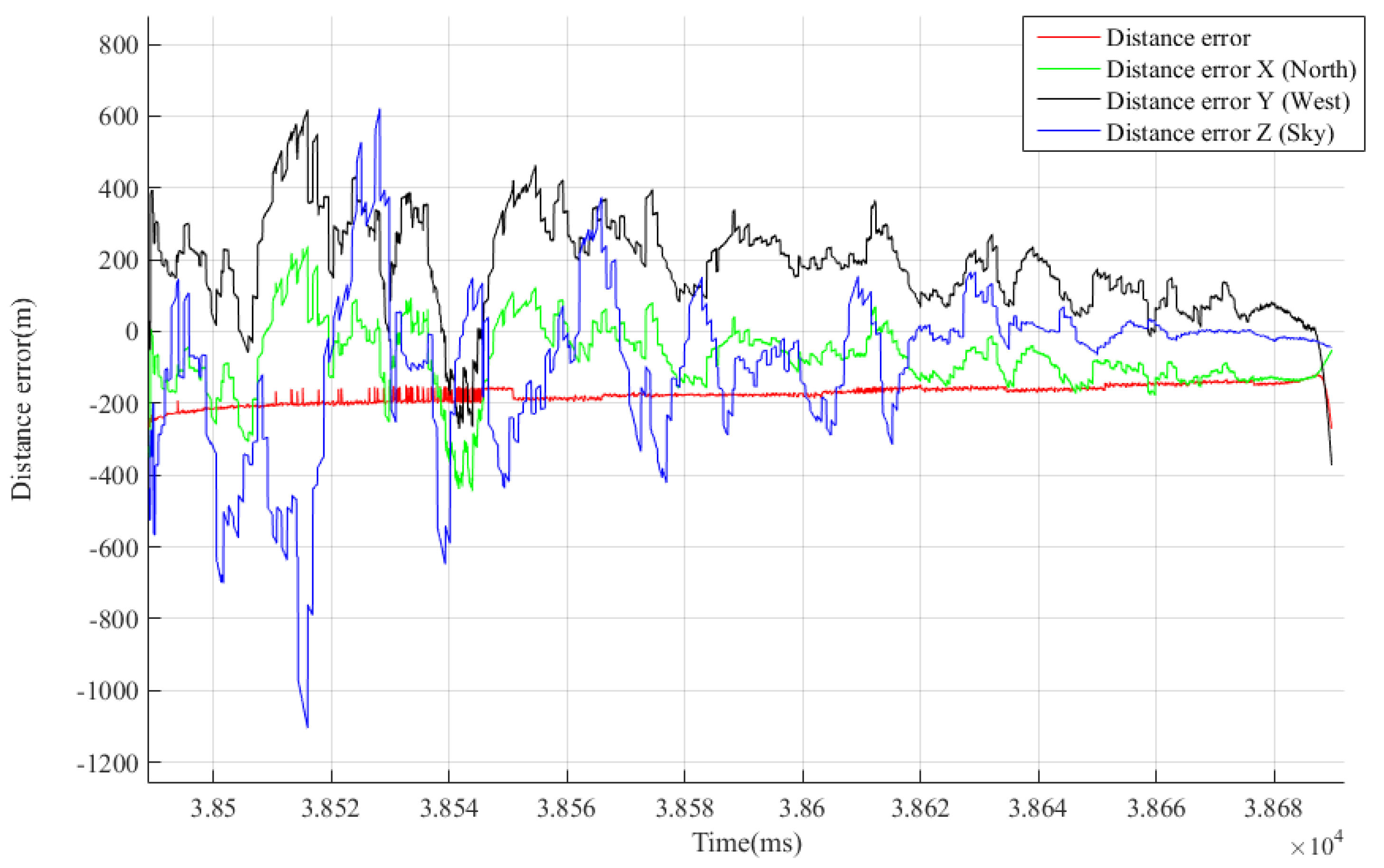
Section 3.2, the compound spatial distance error was generated by the north, west, and sky distance error components. Considering the first simulated autonomous flight as an example, the three directional distance error components are shown in
Figure 16.
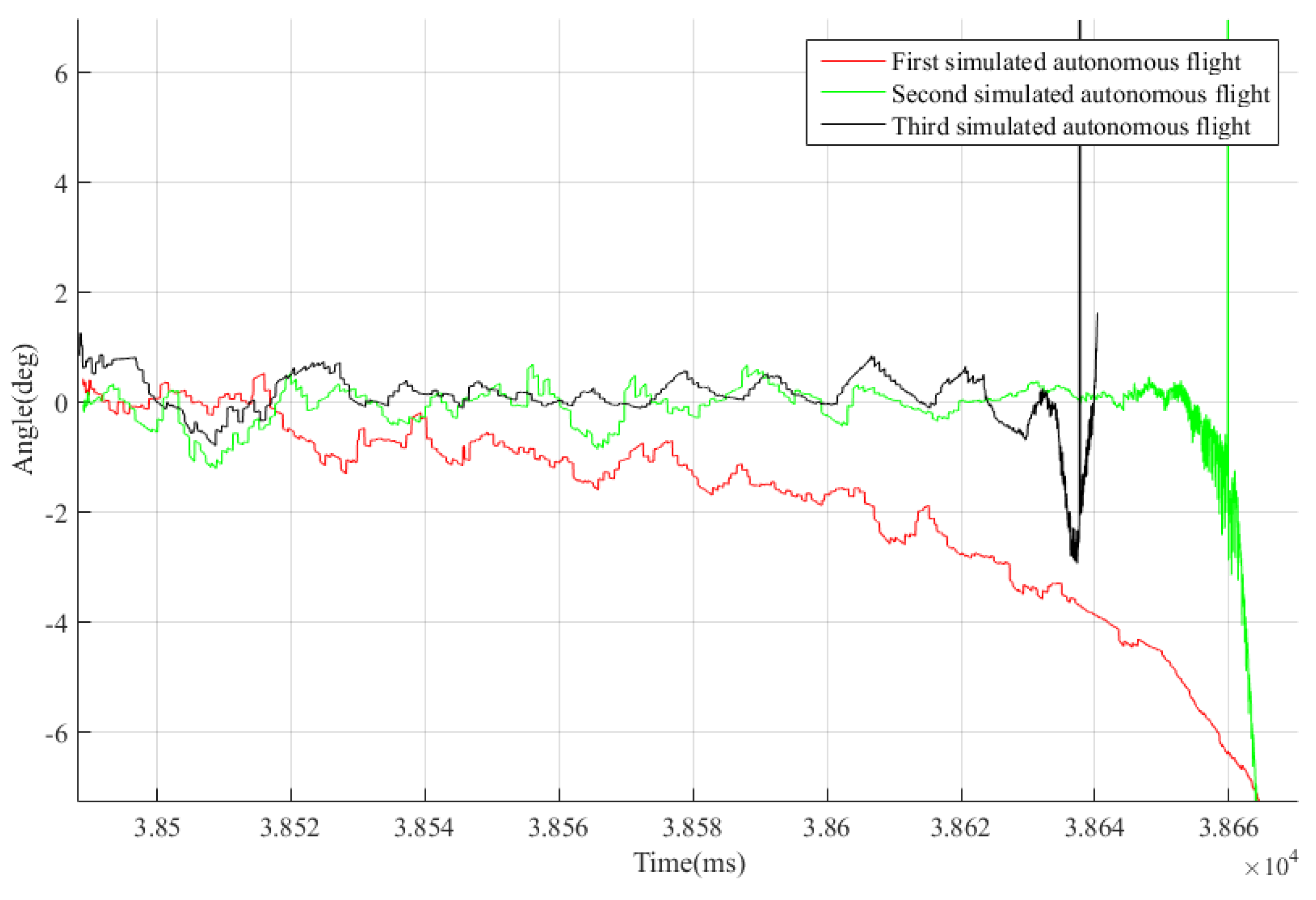
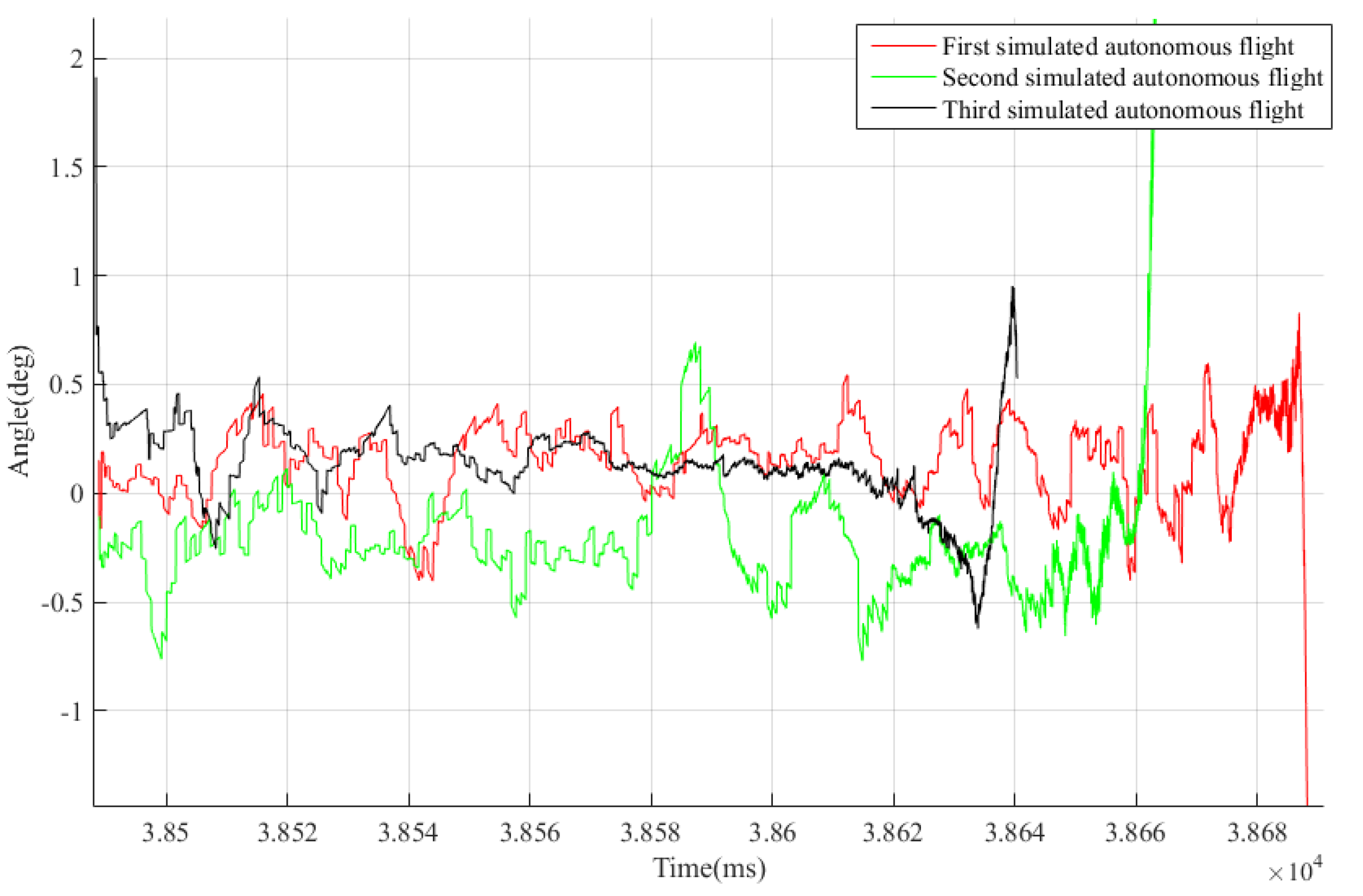
Furthermore, the pitch and heading angle measurement errors incurred by the airborne radar measuring and tracking the target aircraft were obtained from Equations (3) and (4), as shown in
Figure 17 and
Figure 18. It can be concluded that in the stage of stable tracking of the target (excluding the target loss due to the large line-of-sight angle before the two-machine rendezvous), the average pitch and heading angle errors were 0.26° and 0.24°, respectively, and the change was considered limited when the distance varied.
After receiving the target information from the carrier containing the measurement error of the airborne radar, based on the transformation and calculation, the guidance angle was generated to guide the seeker via tracking and interception of the target. The errors considered in the guidance angle included measurement errors of the airborne radar, errors in the navigation calculation of the pod (including hanging errors with the carrier such as mounting error, and transmission errors such as wing deformation), as well as errors due to the radar guidance system in the pod.
To evaluate the self-error of the guidance system, the difference between the guidance angle (recorded by the data recording device in the pod) and the intercepted target angle returned by the pod radar guidance system (recorded by the data recording device in the pod) was acquired. Considering the first simulated autonomous flight as an example, the accumulated errors of the radar guidance system intercepting the target are shown in
Figure 19.
Based on the difference between the accumulated errors of the target interception by the radar guidance system and target measurement errors due to the airborne radar, the error incurred by the radar guidance system was then evaluated. Subsequently, accuracy analyses of the radar guidance system under simulated flight conditions were completed. By considering the first simulated autonomous flight as an example, the intrinsic errors of the radar guidance system are shown in
Figure 20.
The abovementioned radar guidance system errors will adversely affect guidance accuracy. A variety of factors can cause errors, such as antenna pre-set error, electric axis null position error, antenna front installation error, thermal noise, and line of sight error of the radome. Different design schemes and production levels of radar guidance systems also lead to different levels of error influence. Antenna pre-set errors are mainly influenced by variables such as position feedback accuracy, pre-set voltage accuracy, and maximum pre-set angle. Electric axis null position error, a random constant interference, is the deviation between the null positions of the electric and mechanical axes of a radar guidance system. Seeker installation error is another random constant interference. Thermal noise can be analyzed by probability theory. Line of sight error of the radome is caused by the refraction of electromagnetic waves by the radome. It is affected by the radome’s shape, material, machining precision, electric wave polarization mode, electromagnetic wave incident angle, etc. To further reduce the intrinsic errors of radar guidance systems, the abovementioned errors should be considered and strictly controlled during the design and manufacturing process.
In the above analysis, natural clutter, such as clouds and rain, was not considered. In studies that consider electromagnetic wave propagation attenuation caused by rain, clouds, and other specific working conditions and working frequency ranges of the radar, clutter should be analyzed.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}