RTK positioning is a widely used high-precision technology in GNSS. As it can eliminate most of the external system errors, RTK positioning can enable high-precision applications in smartphones. In RTK positioning, we apply the double-difference method to both pseudo-range and carrier phase observations to eliminate observation errors. First, single-difference observations are obtained by the difference between observations from rover station
and reference station
. The obtained single-difference observations are differenced by satellites
and
(reference) to calculate the double-difference observations. In short baselines, the double difference can eliminate satellite-orbit and clock errors, receiver-clock errors, ionospheric and tropospheric delays, and other errors, leaving mainly multipath and measurement noise. When the multipath is significant, the observations for low-cost receivers may be correlated. Therefore, in this study, we first minimize the multipath from the source of data collection and then use a C/N0 stochastic model to reduce the impact of multipath. Hence, it is assumed that the remaining error is random. Under this condition, the double-difference observation equation is given by [
23]:
where the superscript and subscript represent the station difference and satellite difference, respectively,
represents the pseudo-range observations,
represents the carrier-phase observations,
is the wavelength of the carrier phase,
is the geometric distance calculated by the satellite and receiver coordinates,
is the carrier-phase ambiguity, and
and
are pseudo-range and carrier-phase measurement noise terms, respectively. A more compact expression is given by:
where
represents the observation vector,
represents the coordinate parameter vector,
is its coefficient matrix,
represents the ambiguity parameter vector,
is its coefficient matrix, and
represents the noise vector. In RTK positioning, the Kalman filter [
23] is typically used to estimate the unknown floating-point parameters. If high-quality observations
, observation data
, and correctly resolved ambiguity
are obtained, high-precision RTK positioning is achieved.
According to the data quality analysis above, we adopt improved data quality control and integer ambiguity resolution for smartphone RTK positioning. In addition, we analyse RTK positioning for different combinations of observations and its convergence time in different periods.
3.2. Evaluation of Data Processing
First, a combination of GPS and Galileo observations were used in RTK positioning to verify the effectiveness of the data processing strategies, and real-time differential analysis was also used to verify the stochastic models. Except for the stochastic model and ambiguity-resolution strategy, the other specifications are listed in
Table 2. We consider RTK positioning convergence when the errors along the north and east directions are below 0.1 m. In addition, the fixing rate is the number of fixed epochs divided by the total number of epochs, while the error-fixing rate is the proportion of positioning error greater than 0.1 m at fixed ambiguity.
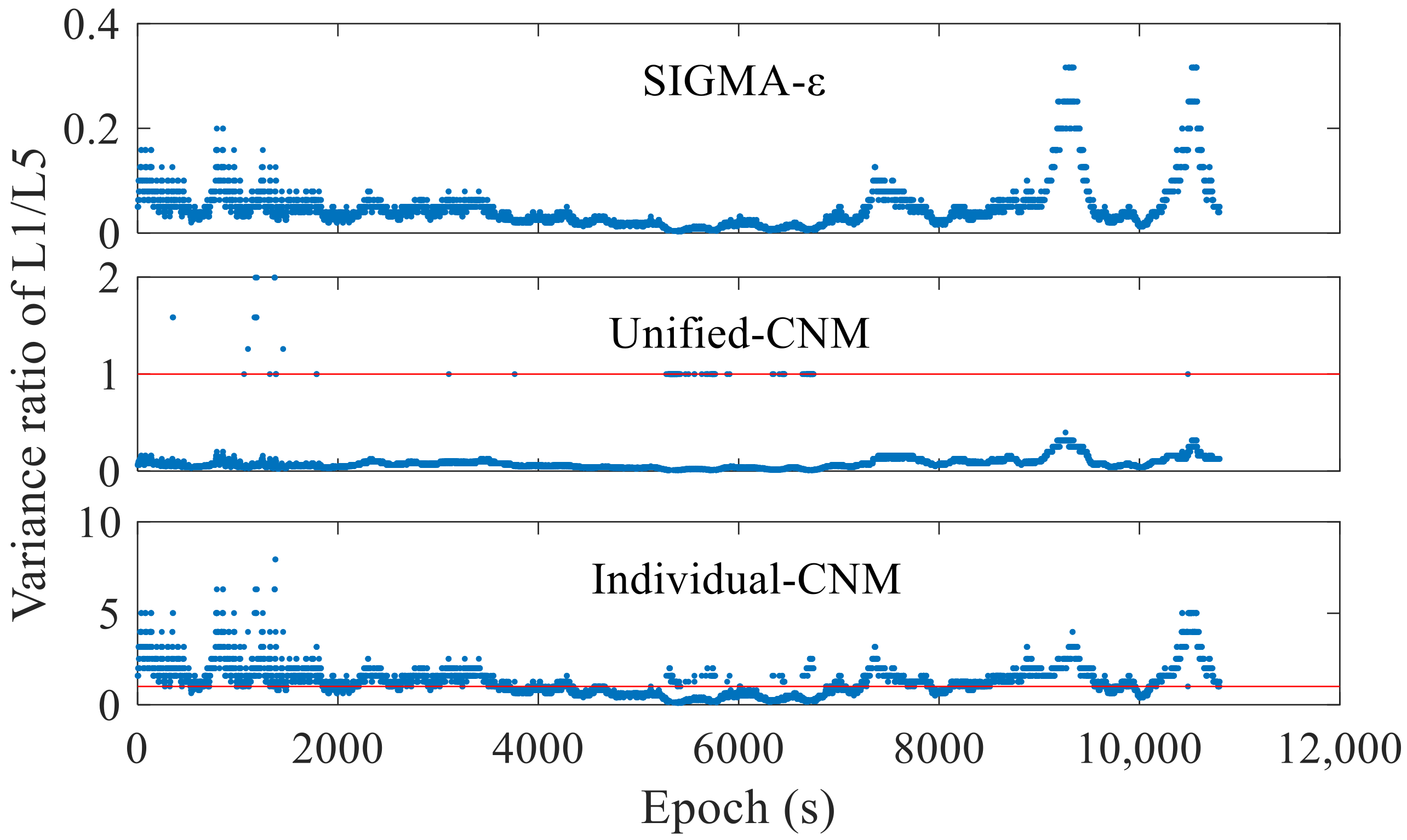
Table 3 lists the real-time differential root-mean-square (RMS) errors of different stochastic models using GPS L1/L5 + Galileo E1/E5a observations for the parameters of the unified-CNM and individual-CNM models described in
Section 3.1.1. The RMS values along the three directions for the individual-CNM model are the smallest, followed by those for the elevation model. However, the results of the SIGMA-ε and unified-CNM models are all worse than those of the elevation model in the real-time differential analysis. Thus, the proposed individual-CNM model provides optimal results.
Next, we used RTK positioning to evaluate the stochastic models.
Table 4 lists the RTK positioning solutions of different stochastic models using GPS L1/L5 + Galileo E1/E5a observations. The positioning accuracy of every C/N0 model is better than that of the elevation model. However, in the C/N0 model, the SIGMA-ε and unified-CNM models take longer to converge. On the other hand, the accuracy of the individual-CNM model is the highest, and its convergence time is similar to that of the elevation model. Therefore, the individual-CNM model achieves the highest positioning performance.
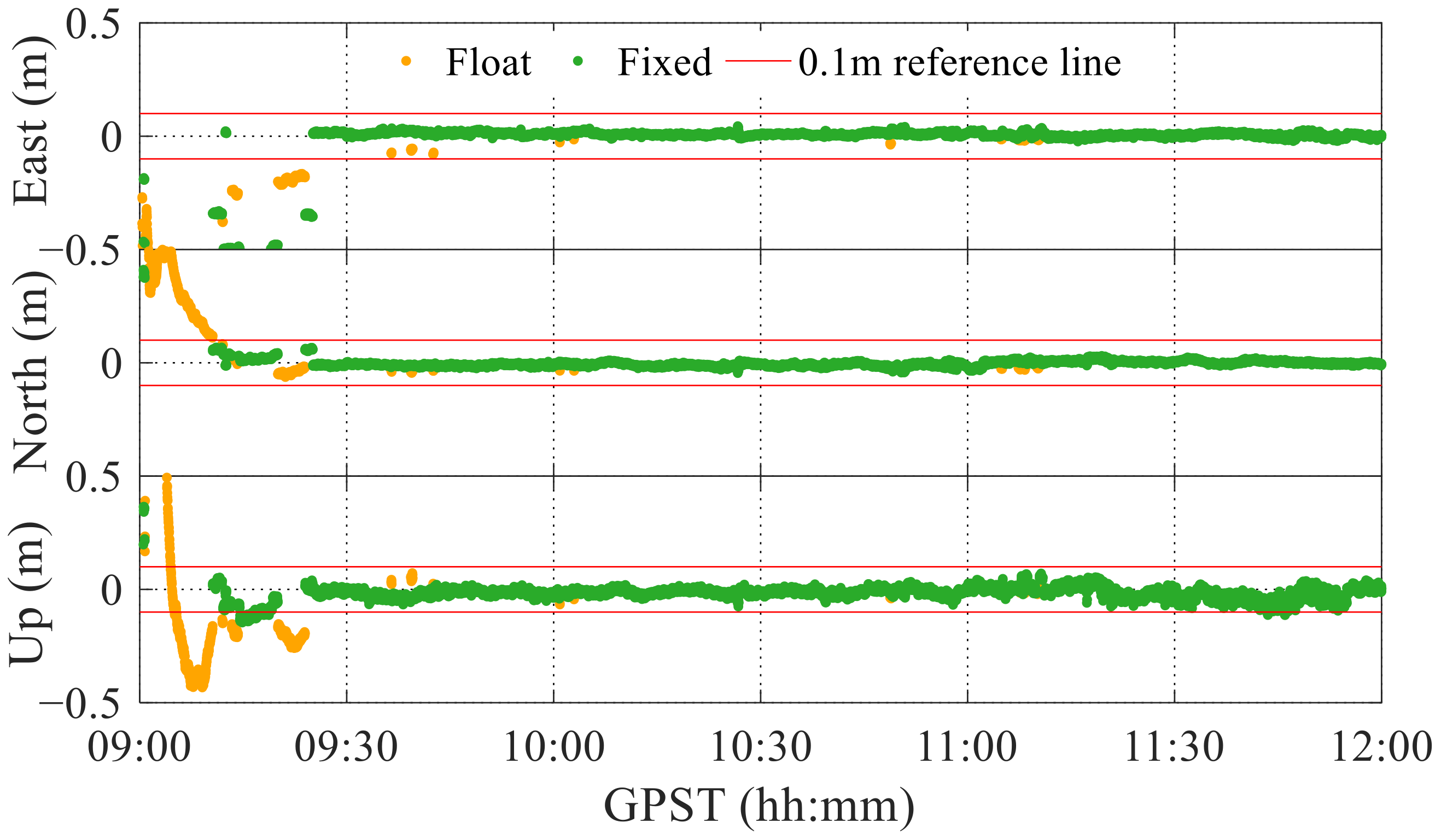
For ambiguity resolution,
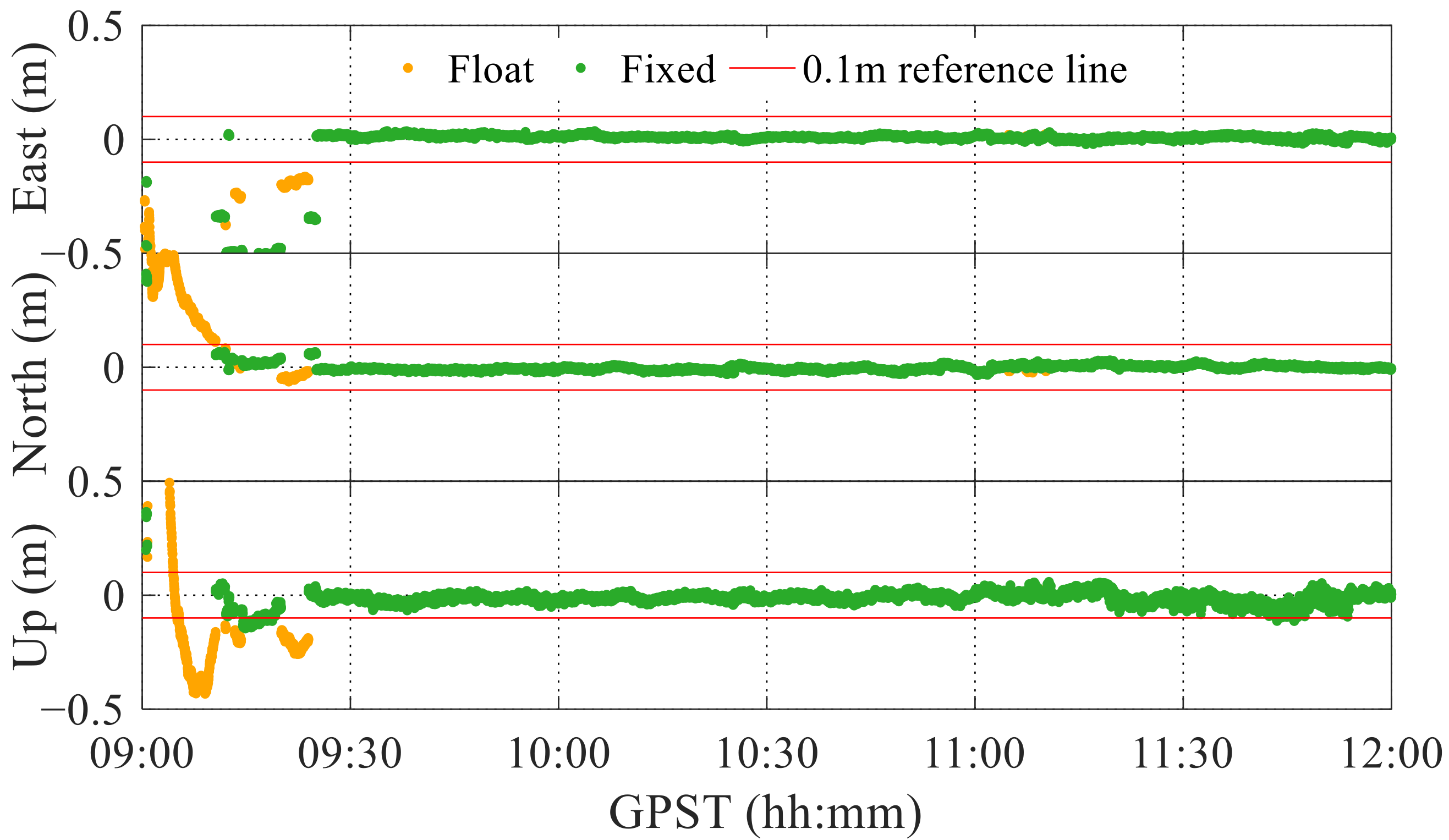
Figure 7 and
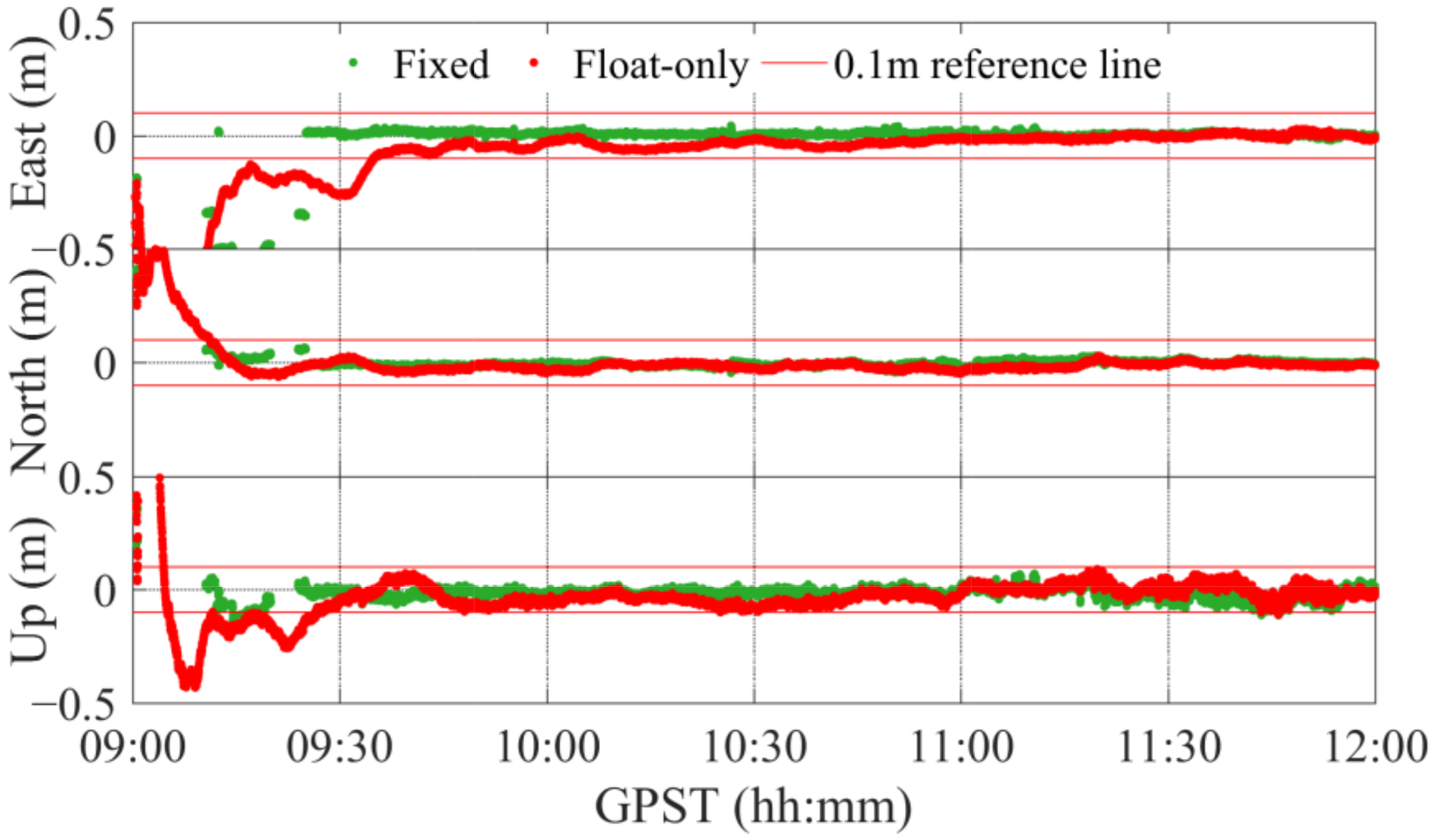
Figure 8 show the fully fixed ambiguity and partially fixed ambiguity solutions for GPS L1 + Galileo E1 observations, respectively. Considering the results after 1500 s (around 9:30), most unfixed ambiguities can be fixed when using the partial resolution, effectively improving RTK positioning. A comparison of the fixed and float-only solutions is shown in
Figure 9. Ambiguity resolution can substantially improve the positioning accuracy.
Table 5 lists the statistical results of the float-only, full, and partial resolution. Overall, the accuracy of fixed solutions is higher than that of float-only solutions, and partial resolution can considerably improve the fixing rate, positioning accuracy, and convergence speed. However, there are also some error-fixed solutions.
In the parameter settings, five epochs (i.e., minimum lock) should converge before participating in ambiguity resolution when a cycle slip occurs, aiming to mitigate the influence of cycle slips. To further weaken the influence of cycle sips, the fix-and-hold mode [
29] is used to impose a tight constraint on fixed ambiguities. This mode uses the fixed ambiguity solutions as virtual observations and performs secondary filtering to improve the filtering covariance matrix, aiming to reduce the influence of state initialisation on the covariance.
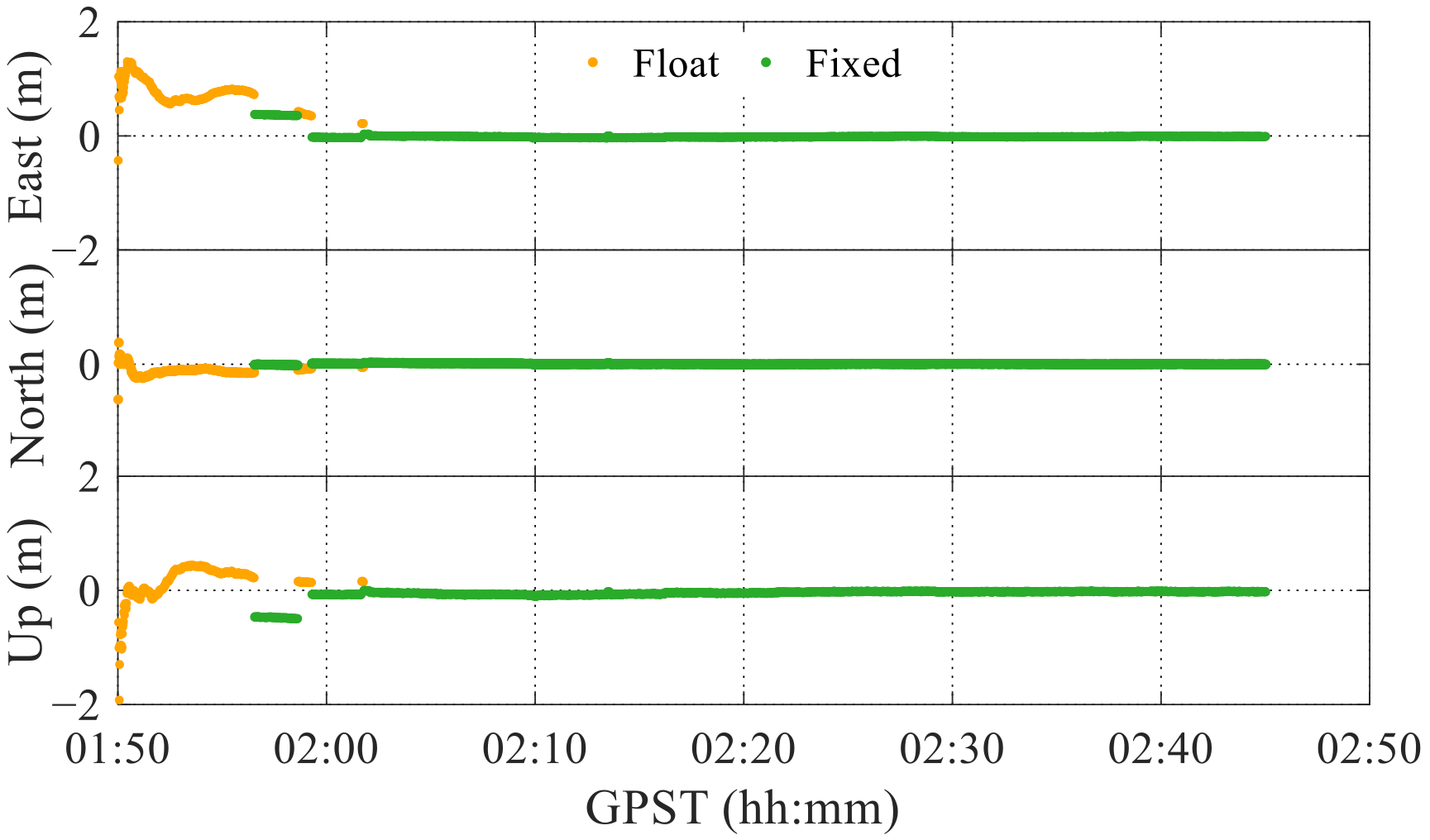
Only when the ratio reaches 10.0 or higher do we use the fix-and-hold mode for ambiguity resolution to ensure the reliability of fixed solutions. The corresponding solutions are shown in
Figure 10. Compared with
Figure 8, the positioning results are smoother after using the fix-and-hold mode. The fixing rate increases to 90.8% and up to 100% after convergence. Therefore, when the fixing rate is not low in the continuous mode, we also apply the fix-and-hold mode to improve the fixing rate.
3.3. Evaluation of Ambiguity Resolution for Different Observation Combinations
Next, we evaluated the actual fixing rate and fixed-solution accuracy of different observation combinations to improve observation selection. The positioning parameters are as listed in
Table 2. The solutions for single-frequency observations are listed in
Table 6.
Table 6 shows that when using single-constellation and single-frequency observations, the mean number of satellites is approximately six, and thus the fixing rates are low and cannot converge. When using the G/C combination, which nearly doubles the number of satellites, the fixing rate increases to 55.6%, but it remains low and has a slow convergence. On the other hand, the fixing rate of the G/E combination can reach 90.8% and converges after 25.1 min, indicating substantial improvement in both the fixing rate and convergence time.
When using combinations G/E/C and G/R/E/C, the number of satellites greatly increases, but the fixing rate decreases drastically, possibly due to anomalies in the BDS and GLONASS observations acquired by the smartphone. After analysis, we found that for combination G/C or G/E/C, after excluding the BDS GEO and GLONASS satellite observations, the fixing rate increases to 80.3% and 85.7%, respectively, and the convergence speed also increases. This is mainly attributable to the GEO satellite observations in smartphones, which have a half-cycle jump, and the GEO satellite itself has a very poor orbit accuracy [
30].
Figure 11 shows that in the observations from the two BDS GEO satellites, C01 and C03, the carrier-phase residuals of the float solutions in many epochs are close to 0.5, likely corresponding to half-cycle jumps. However, the half-cycle jumps are very difficult to detect. Such jumps should be identified by the loss-of-lock indicator in the RINEX file or in field AccumulatedDeltaRangeState [
4] of the GNSS raw measurements. In addition, in the combination of G/E/C, when excluding the BDS GEO satellite observations and not fixing the BDS ambiguities, the fixing rate increases again to 88.5%. The main reason is that the cycle slips of BDS are more frequent than those of other constellations (
Figure 5). As frequent cycle slips severely undermine positioning, it is better not to fix the BDS ambiguity. In contrast, although GLONASS observations have fewer cycle slips, the fixing rate of combination G/R/E/C is also lower than that of combination G/E/C, mainly because the noise of GLONASS observations in smartphones is higher than that of observations from other constellations [
6]. Therefore, for a suitable number of satellites, the cycle-slip satellites should be controlled to participate in positioning, and observations from the BDS GEO and GLONASS satellites should be avoided.
Further analysis of the combinations that include dual-frequency observations and other satellites with single-frequency data was also performed. The corresponding solutions are listed in
Table 7. The fixing rate of the GPS dual-frequency observations is only 22.4%, which is lower than the single-frequency result, and the fixing rate of G/E single-frequency observations is relatively high, but the dual-frequency fixing rate is only 10.6%, being lower than that of the single-GPS constellation. The positioning accuracy also fails to converge within 0.1 m. If band L5 or E5a is not fixed, the fixing rate increases to 59.1% and 88.0%, respectively, mainly because the cycle slips in bands GPS L5 and Galileo E5a are extremely frequent, with those of band Galileo E5a being more frequent. The cycle-slip ratios in bands GPS L5 and Galileo E5a are 5.2% and 8.2%, respectively. When a cycle slip occurs in RTK positioning, the ambiguity parameters should be reinitialised, and frequent initialisation reduces the ambiguity fixing rate.
In
Table 7, the number of satellites with simultaneous dual-frequency observations is low, and their cycle slips are frequent, further reducing the availability of dual-frequency observations. Therefore, these observations are limited for use in long-baseline RTK positioning or precise point positioning and other multi-frequency combination positioning strategies.
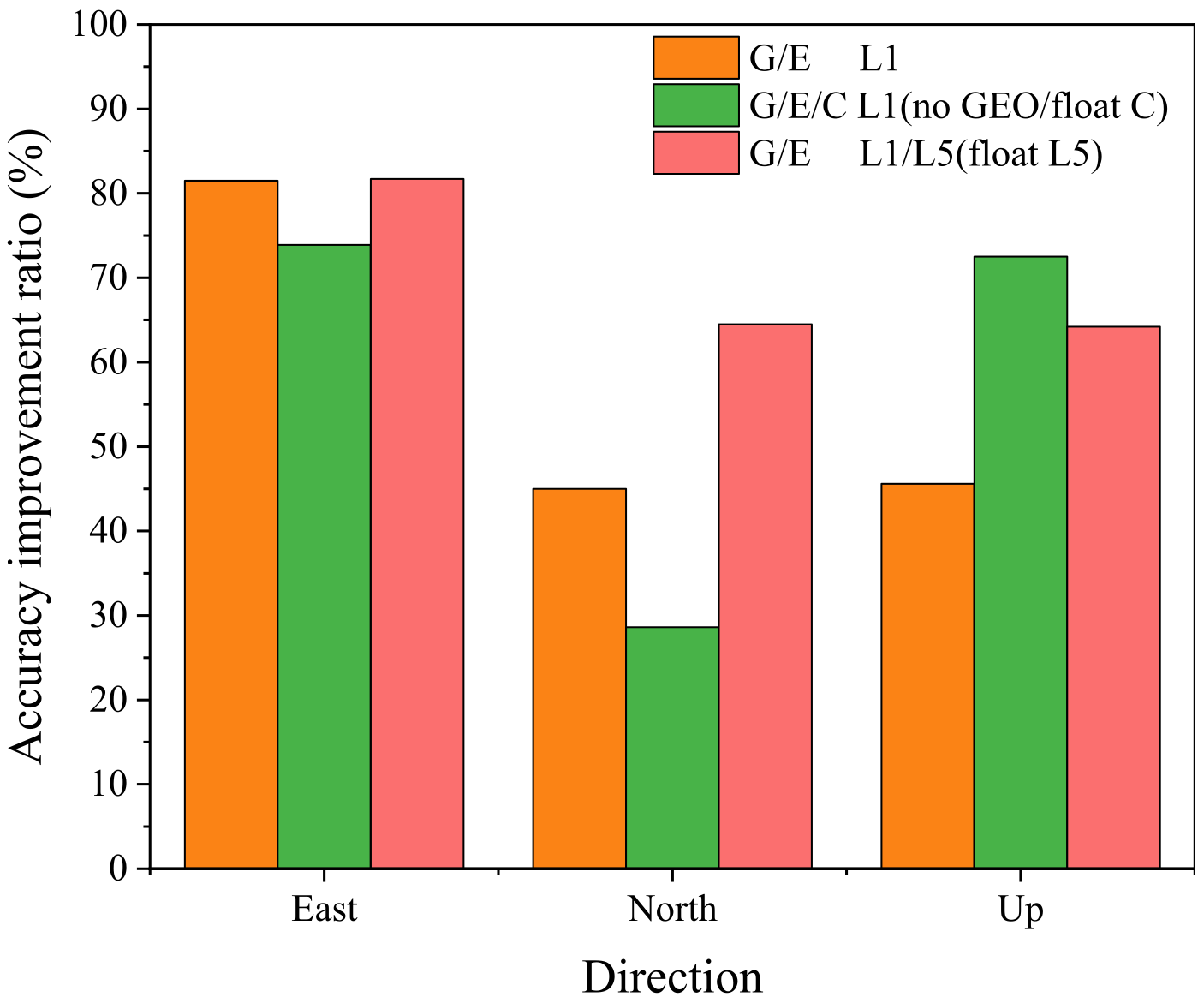
In the results reported above, the accuracy of fixed solutions using different observation combinations is consistent, and an accuracy of approximately 1 and 2 cm can be achieved along the horizontal and vertical directions, respectively. However, owing to the excessive noise in smartphone observations, even for a fixing rate above 90%, it is still difficult to obtain millimetre-level accuracy. For several combinations with a fixing rate higher than 88%, we compared the accuracy of the fixed solutions and their corresponding float solutions simultaneously after the fixed solutions converged, obtaining the results shown in
Figure 12. After fixing the ambiguity, the accuracy along the three directions improves. The east direction shows the highest improvement, reaching approximately 80%, and the other two directions show improvements by more than 30%. Hence, ambiguity resolution is important for high-precision positioning in smartphones, and future work should pursue further improvements in the fixing rate while shortening the convergence time.
The above analysis shows that the large difference in fixed rates for the different combinations is mainly due to the impact of the number of satellites, cycle slips, and observation accuracy. By considering the results above, the correct fixing rate, and a reasonable convergence time, we recommend using combination G/E/C (no GEO/float C) for poisoning based on smartphone observations when the number of satellites is sufficient.
3.4. Analysis of RTK-Positioning Convergence Time by Segment
To verify the consistency of the convergence time in different periods, we solved the entire observation data in segments, that is, we reinitialised the coordinates and ambiguity parameters in a segments once every 1 h, and then solved the segments separately. As reported above, the combination G/E/C of single-frequency observations provides the best convergence overall. Thus, we used it for data processing without resolving the BDS ambiguity. The other calculation parameters were set as listed in
Table 2. Considering slow convergence, we started to fix the ambiguity after 3 min of observations.
In addition to the data from 15 November 2020, which were used above, we used two additional datasets collected in recent days, at the same location and with a similar setup. The data collected on 11 November 2020 are approximately of 3 h, and the data collected on 14 November 2020 are approximately of 5 h. Here, we used the last 3 h of the 5 h data for analysis, owing to the clock jump in the previous data, and it will not affect the results of the segmented solution. These two datasets mainly aim to increase the amount of data for convergence time analysis and do not consider the impact of geomagnetic storm conditions on different days.
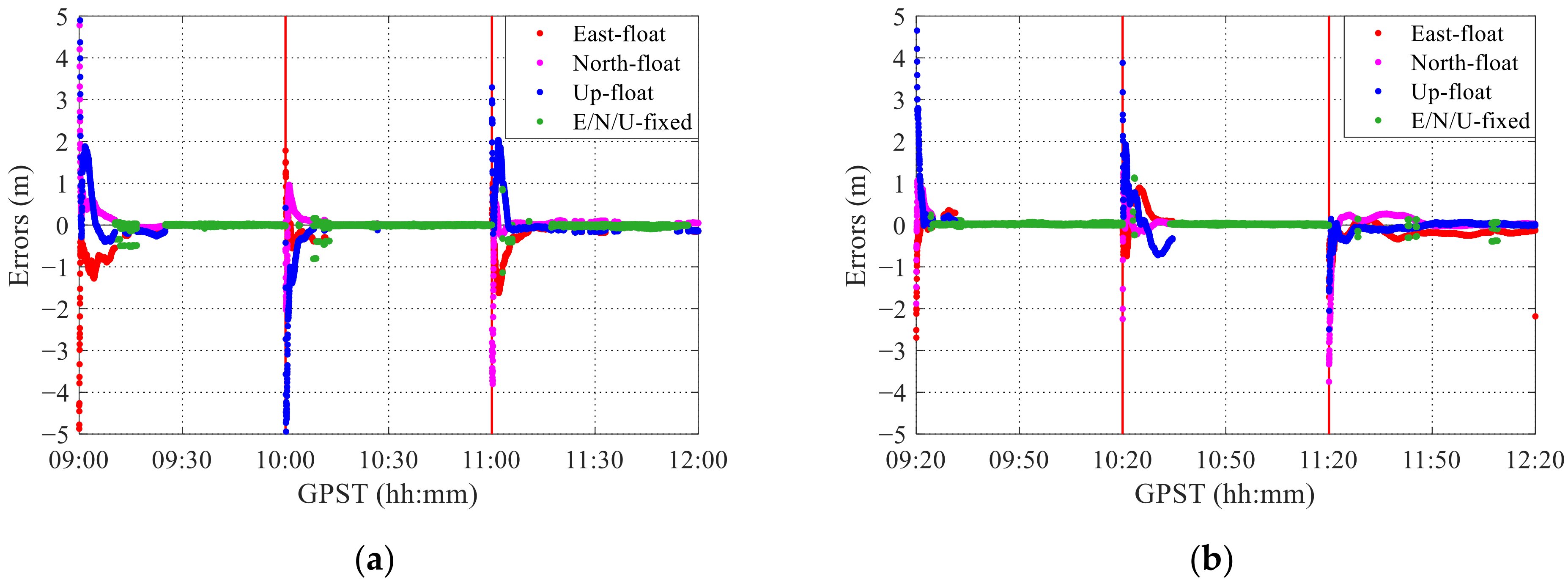
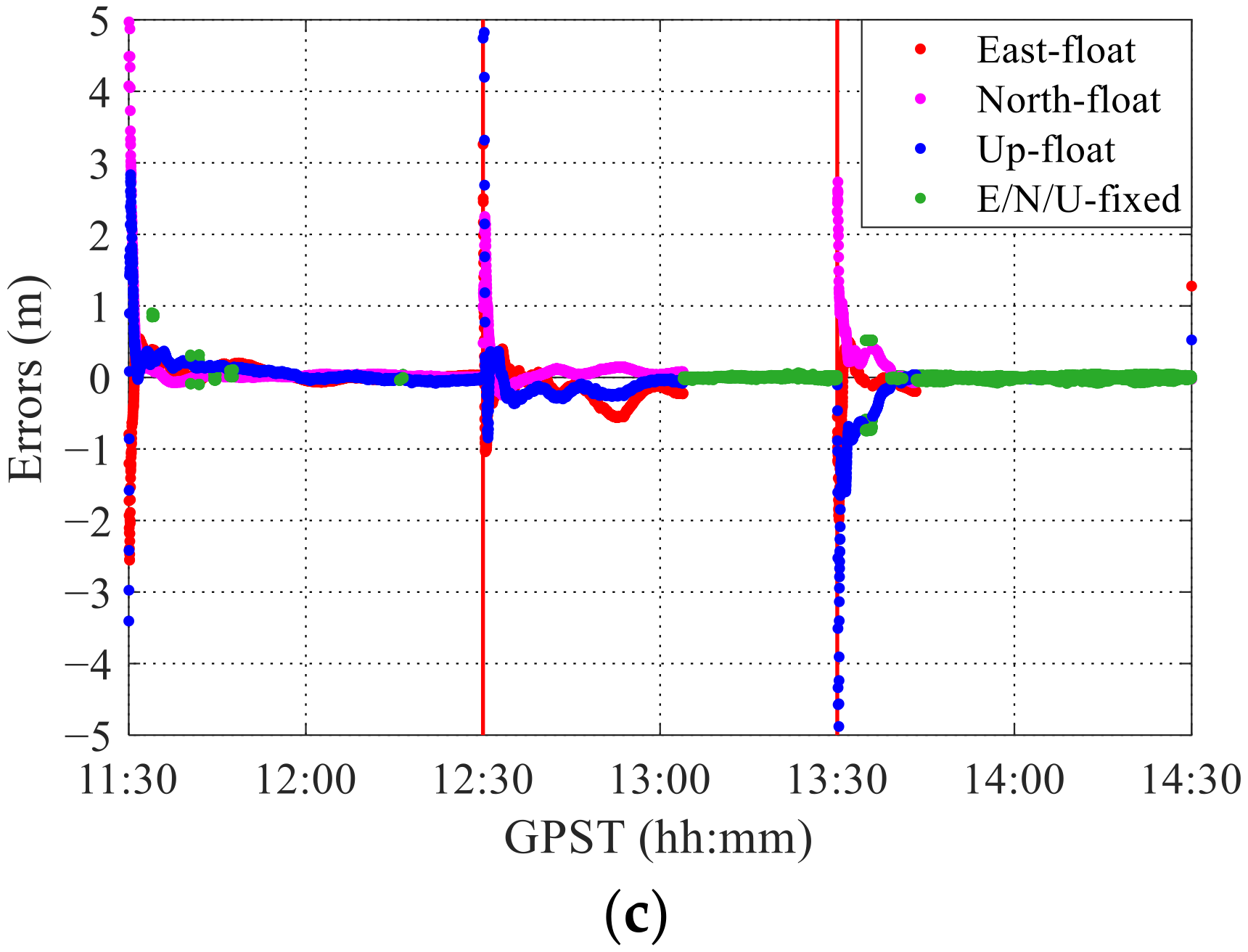
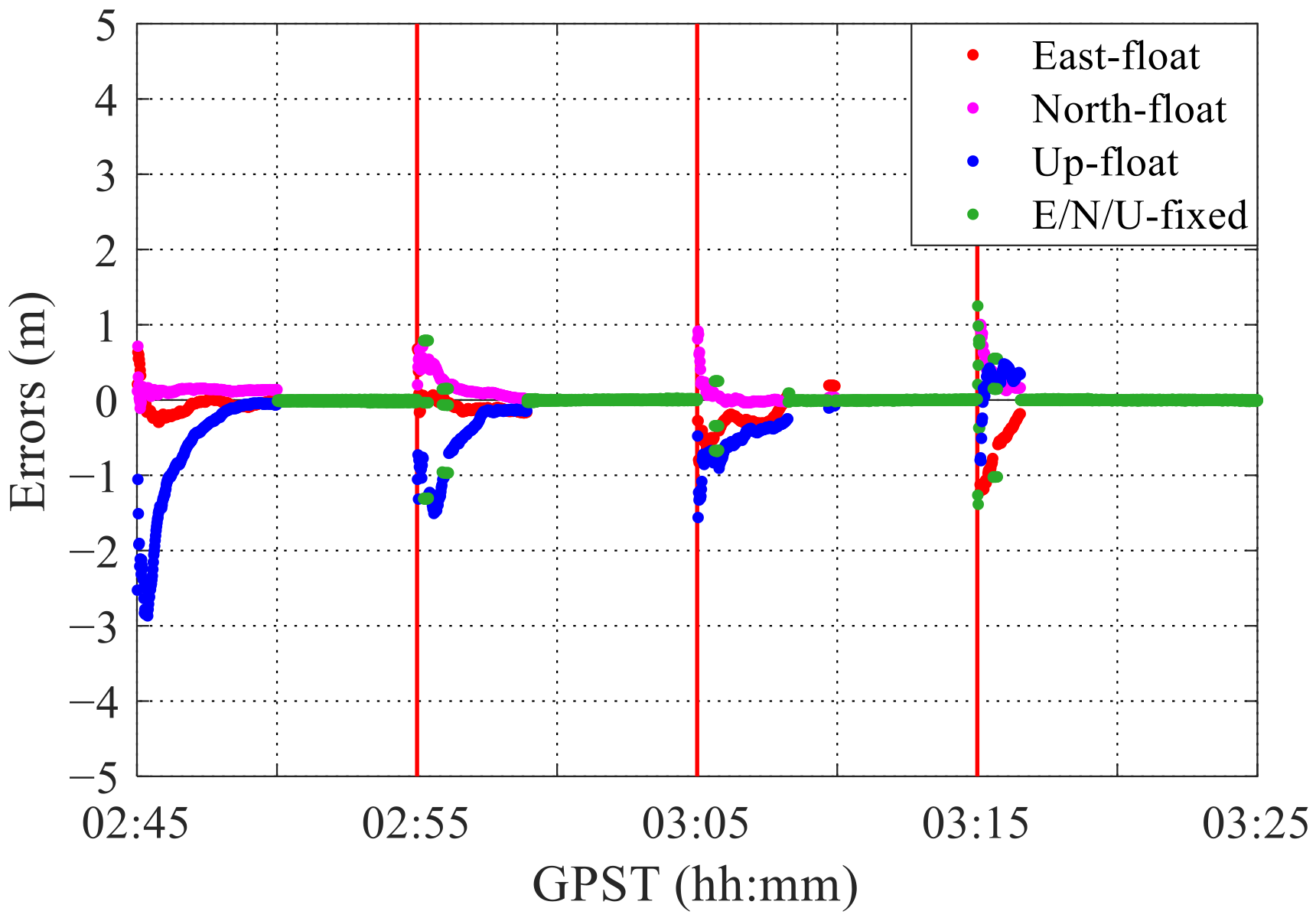
Figure 13 shows the segmented solutions for 1 h intervals.
Table 8 lists the convergence time of each session, the mean number of satellites in combination G/E (as BDS is not fixed, the number of BDS satellites is not considered), and the mean number of candidate ambiguities that meet the fixed conditions (e.g., C/N0 threshold, cycle slip). The convergence time differs across segments, mostly being 10–20 min and exceeding 30 min for few segments. In addition, the ambiguity can hardly be resolved for two segments mainly because the number of candidate ambiguities is very small. The corresponding segment with a long convergence time usually has few candidate ambiguities. For example, for segment 1 of dataset 2, the number of candidates is the largest, achieving the fastest convergence, whereas for segment 3 of dataset 2 and segment 1 of dataset 3, the number of candidates is lower than 1 (0.4 and 0.2, respectively), and the ambiguity cannot be fixed. Even if the total number of satellites is large, when a satellite elevation and C/N0 are very low or a cycle slip occurs, the corresponding ambiguity does not meet the fixed conditions and cannot be used for ambiguity resolution, resulting in few candidate ambiguities. On the other hand, the results in
Section 3.3 show that simply including the number of observations from other constellations or frequencies in ambiguity resolution is not conducive to a higher fixing rate.
Table 8 shows that the cycle-slip rate may not determine the number of candidates directly because it is also related to other factors, but a large number of candidates must correspond to a low cycle-slip rate. The pseudo-range residuals are approximately 5 m, and there is no obvious correlation with the fixing rate. However, the pseudo-range accuracy is the main factor influencing the main convergence speed [
31], but it can be superseded by other factors such as the cycle slips. The effect of the cycle-slip rate and pseudo-range accuracy on convergence is reported in
Section 5. Nevertheless, we can conclude that higher-quality GPS and Galileo observations increase the number of candidate ambiguities, accelerate convergence, and increase the fixing rate.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}