
Cross-Modal Effect of Presenting Visual and Force Feedback That Create the Illusion of Stair-Climbing



Abstract
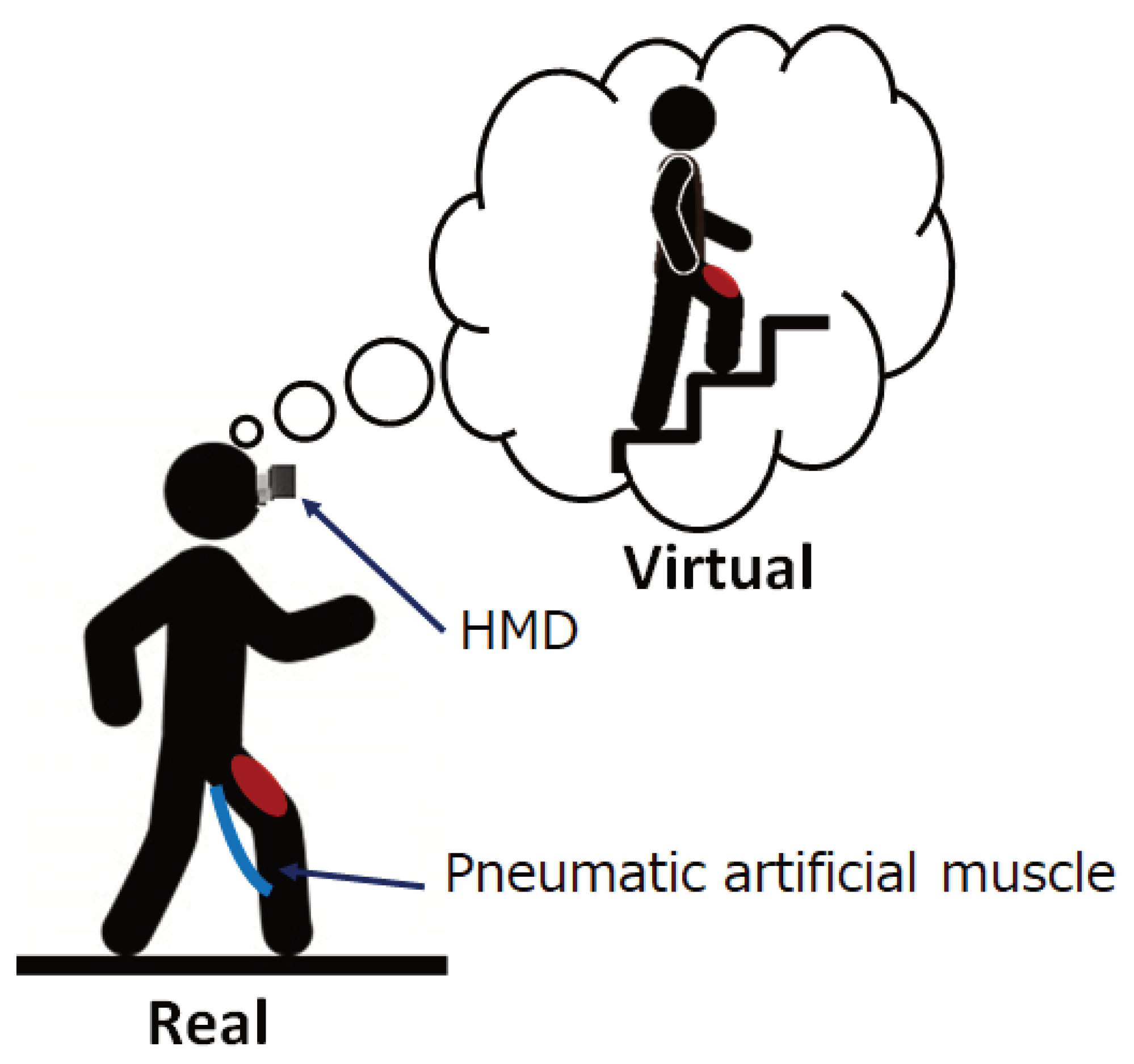
1. Introduction
2. Materials and Methods
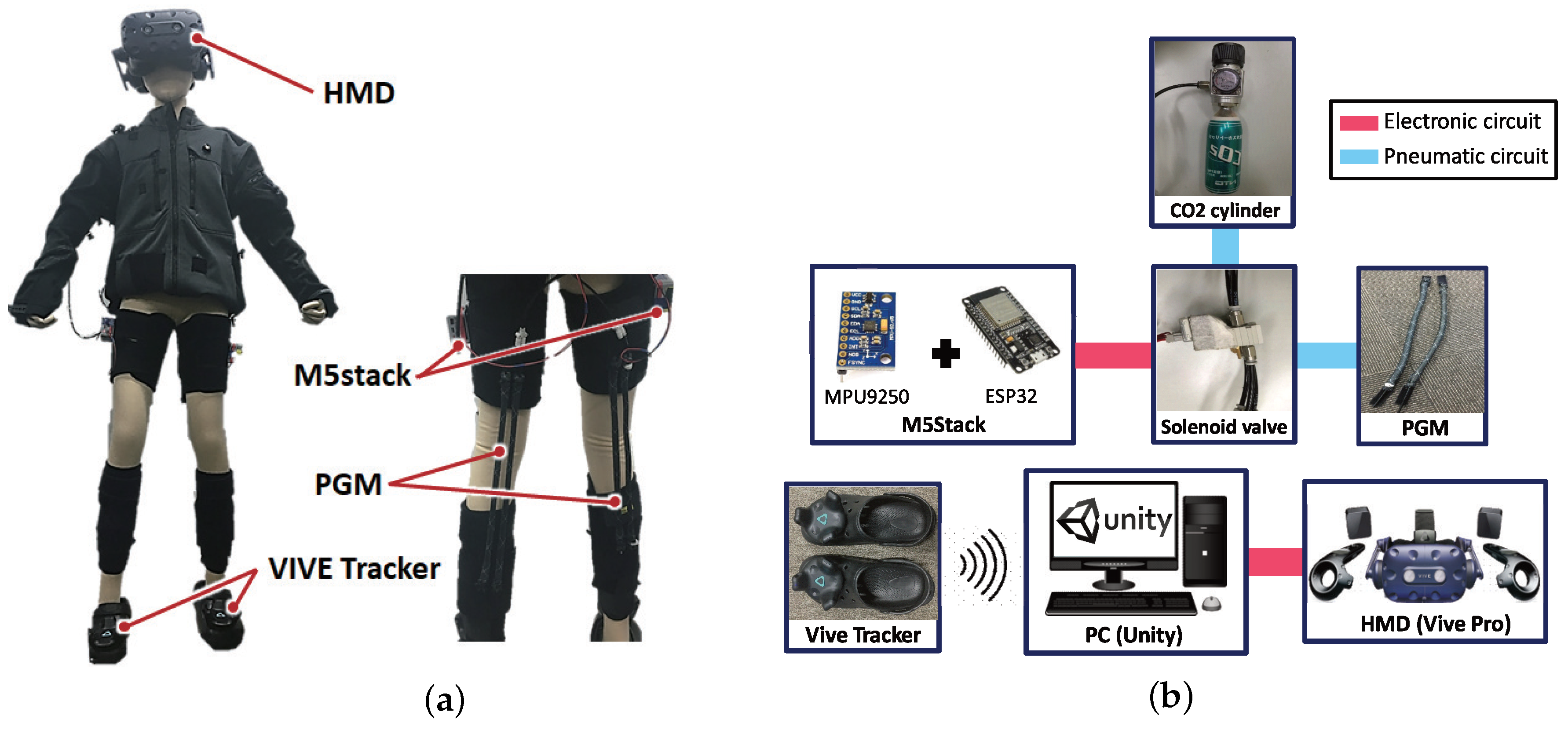
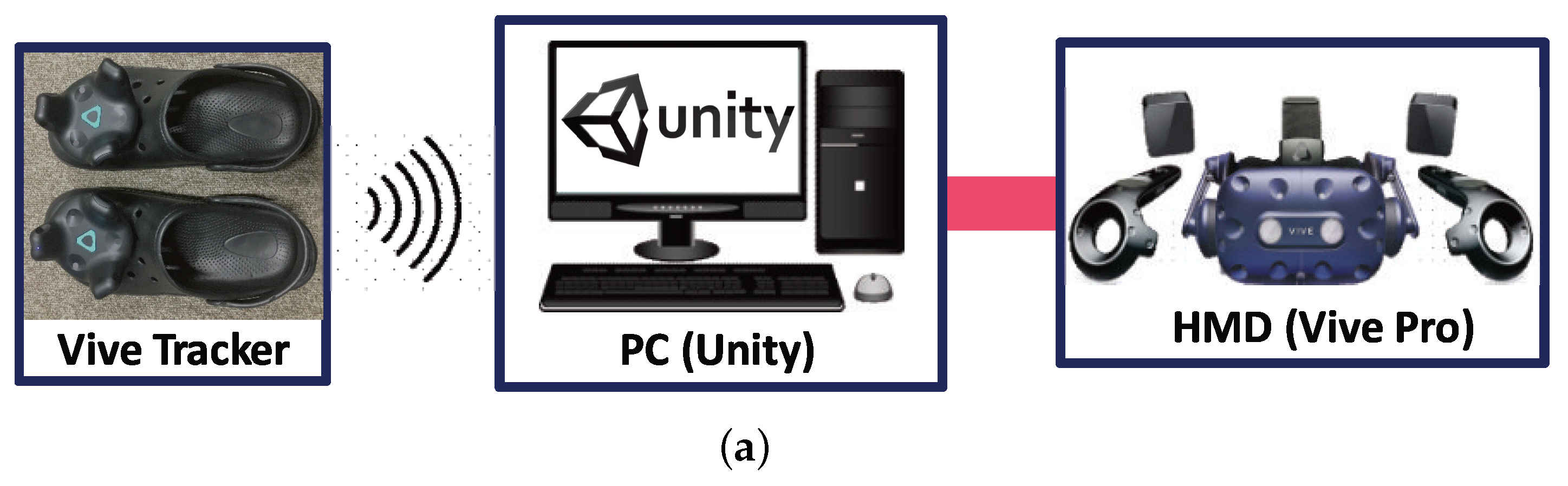
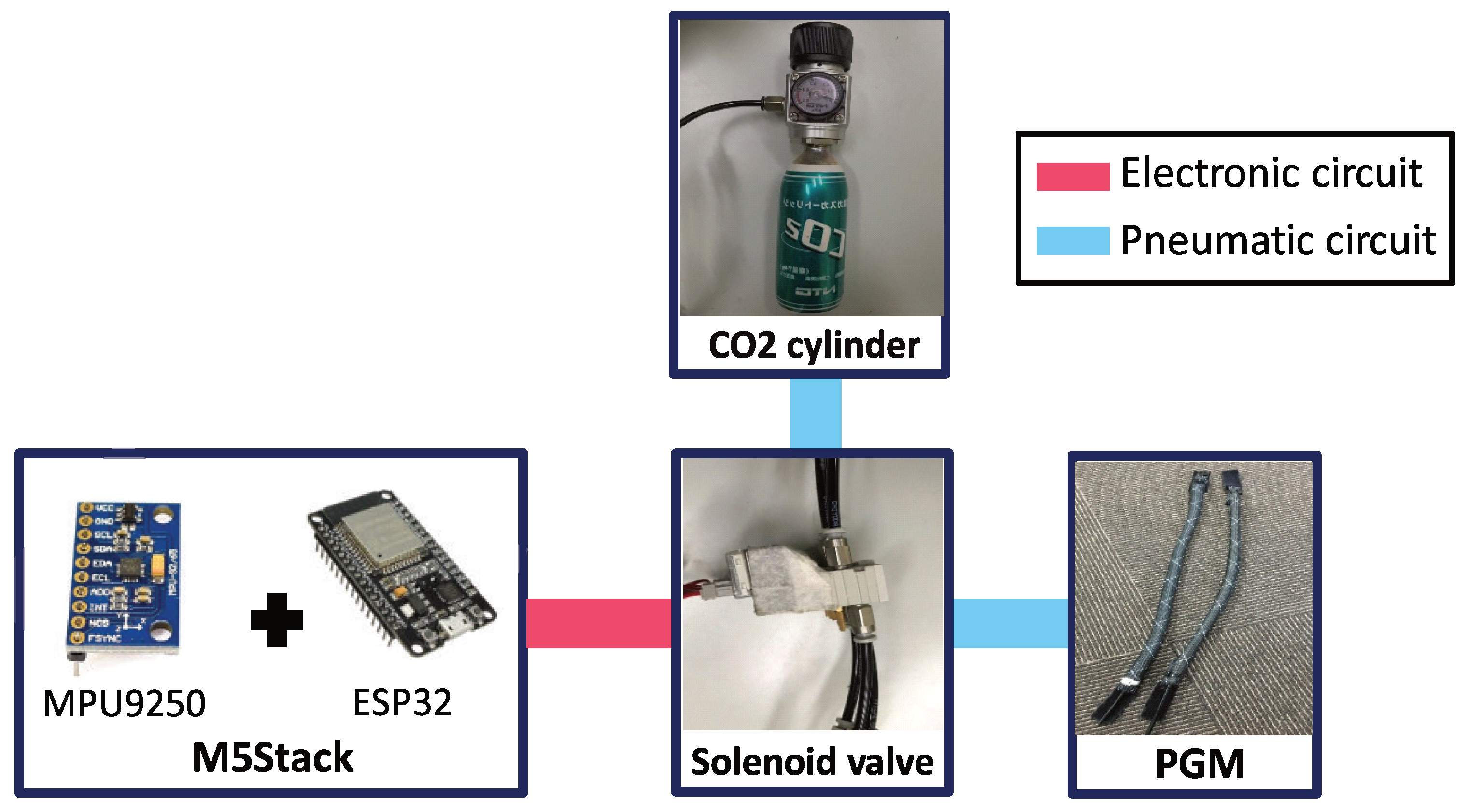
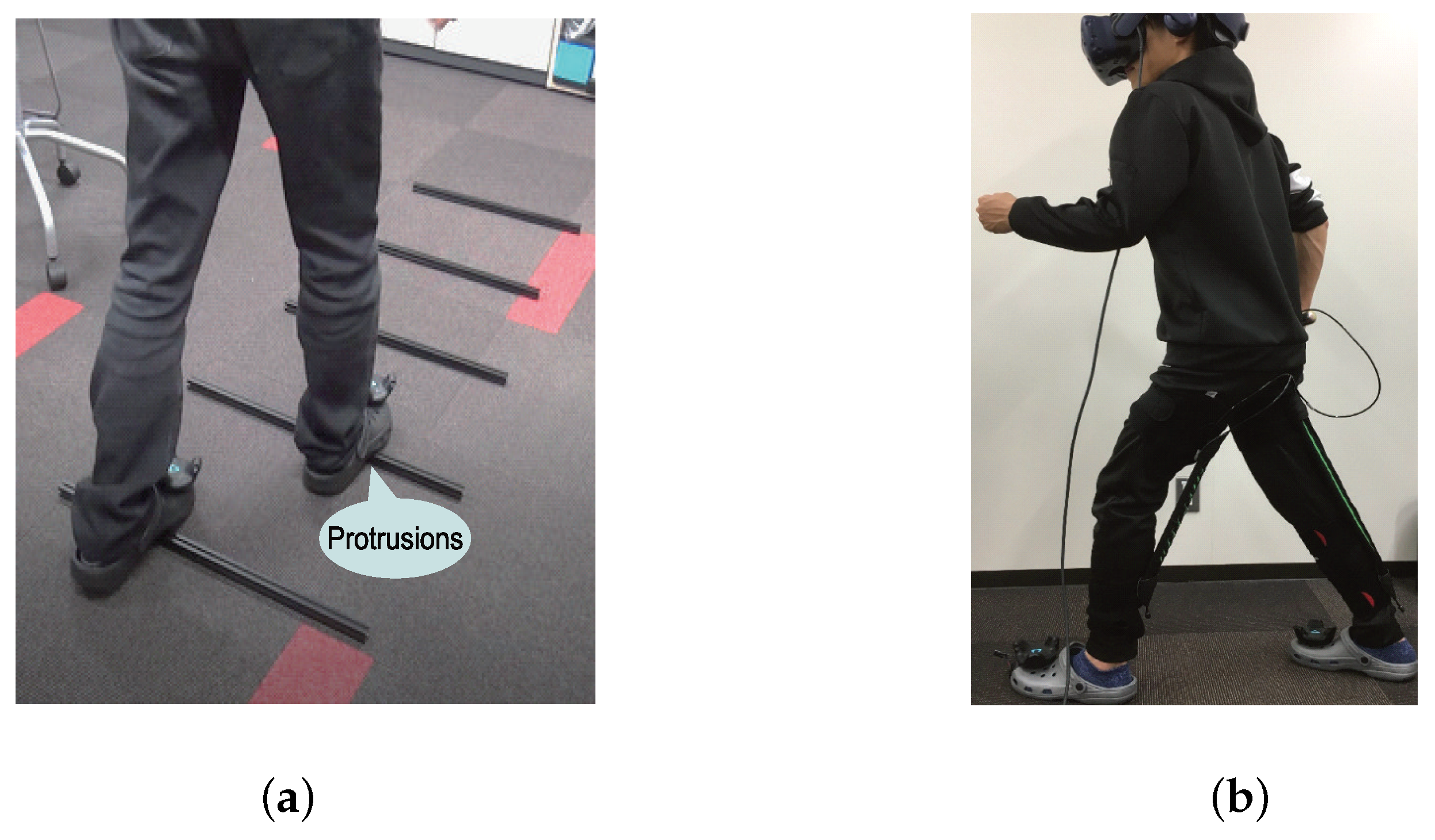
2.1. System Overview
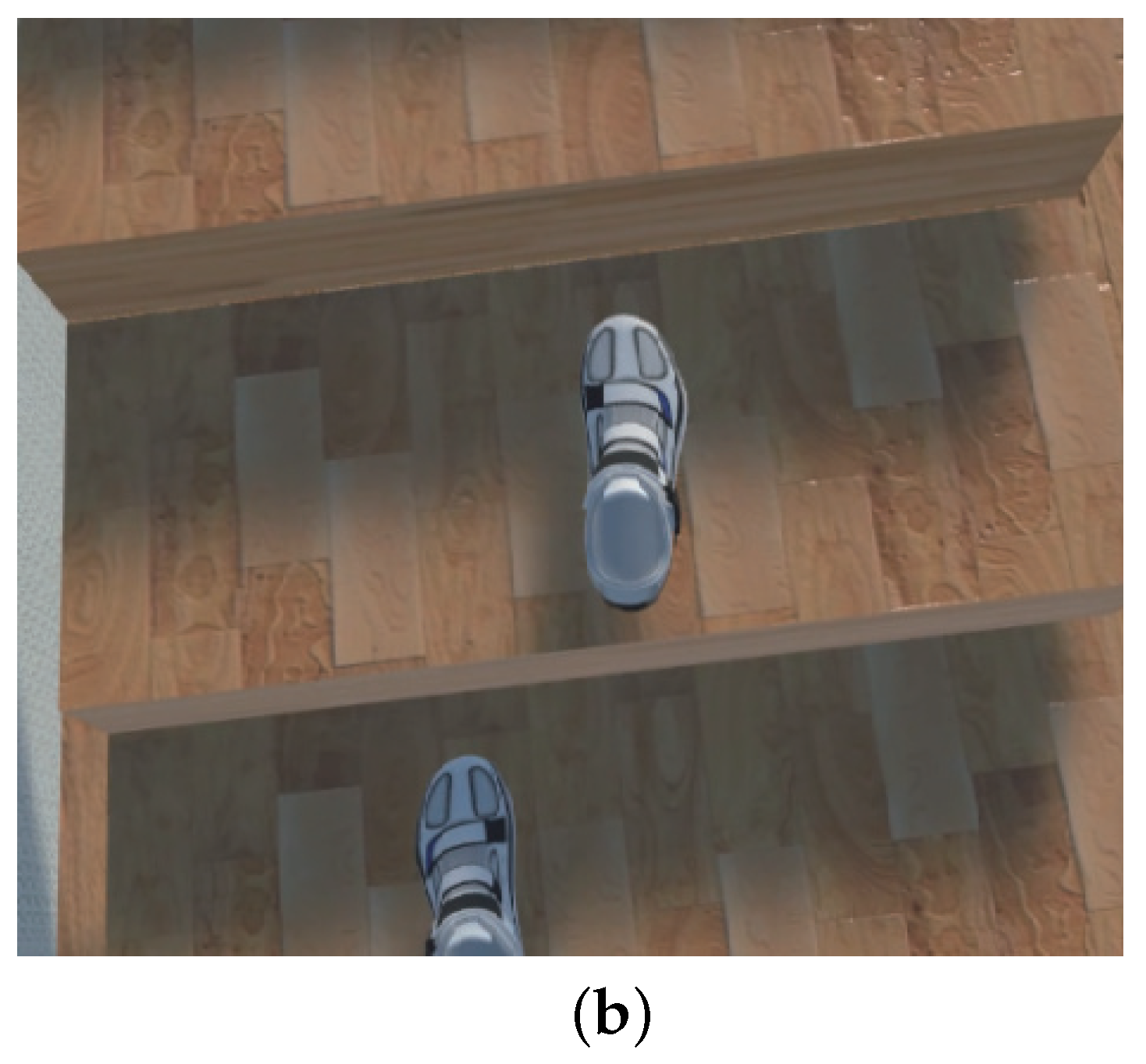
2.2. Visual Display
2.3. Force Display
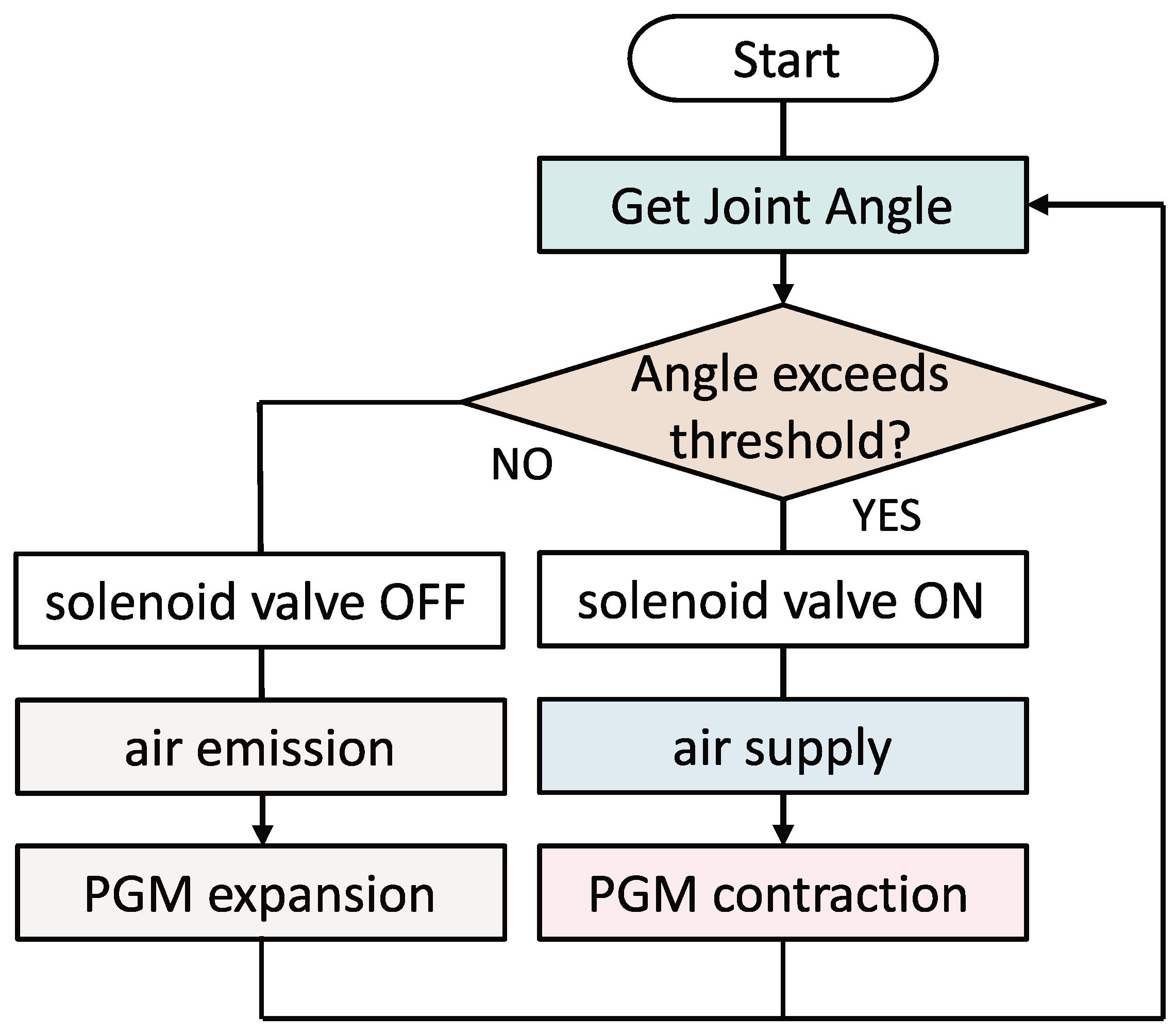
2.3.1. Overview of the Force Display Part
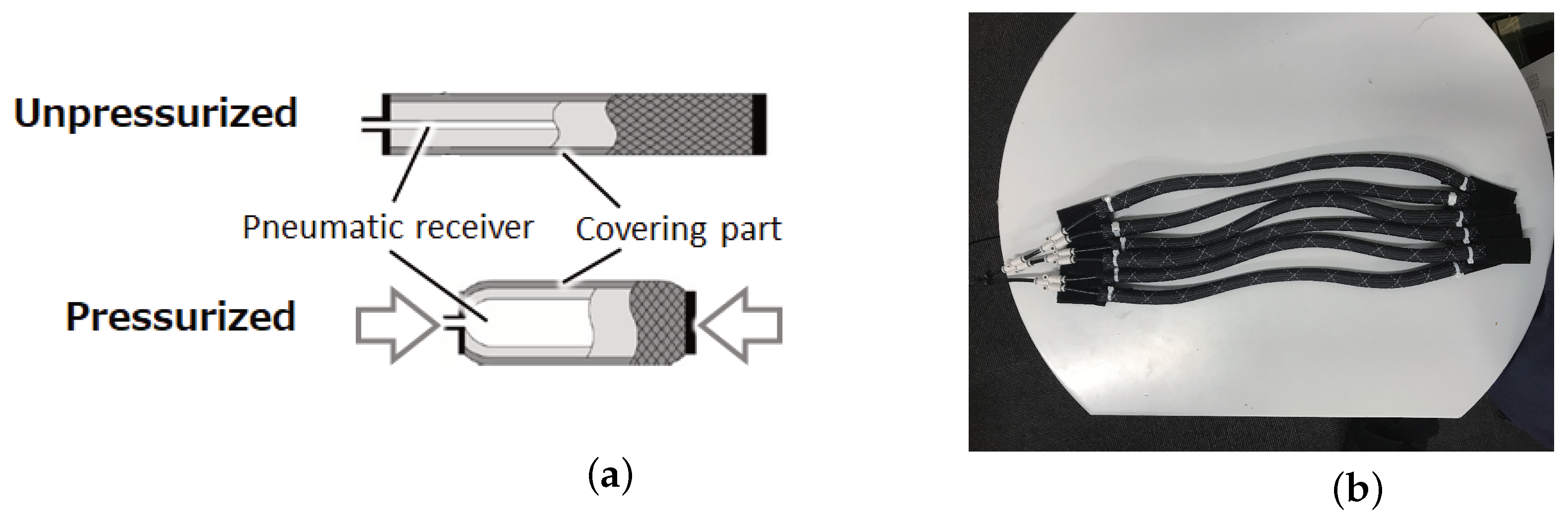
2.3.2. Pneumatic Gel Muscle
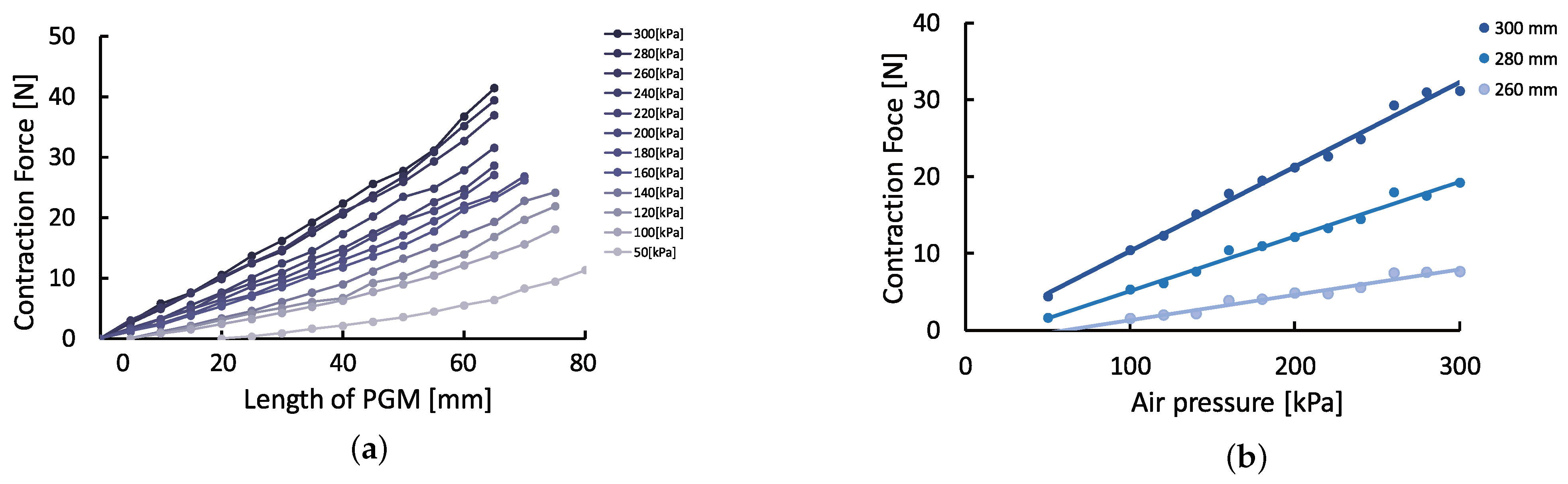
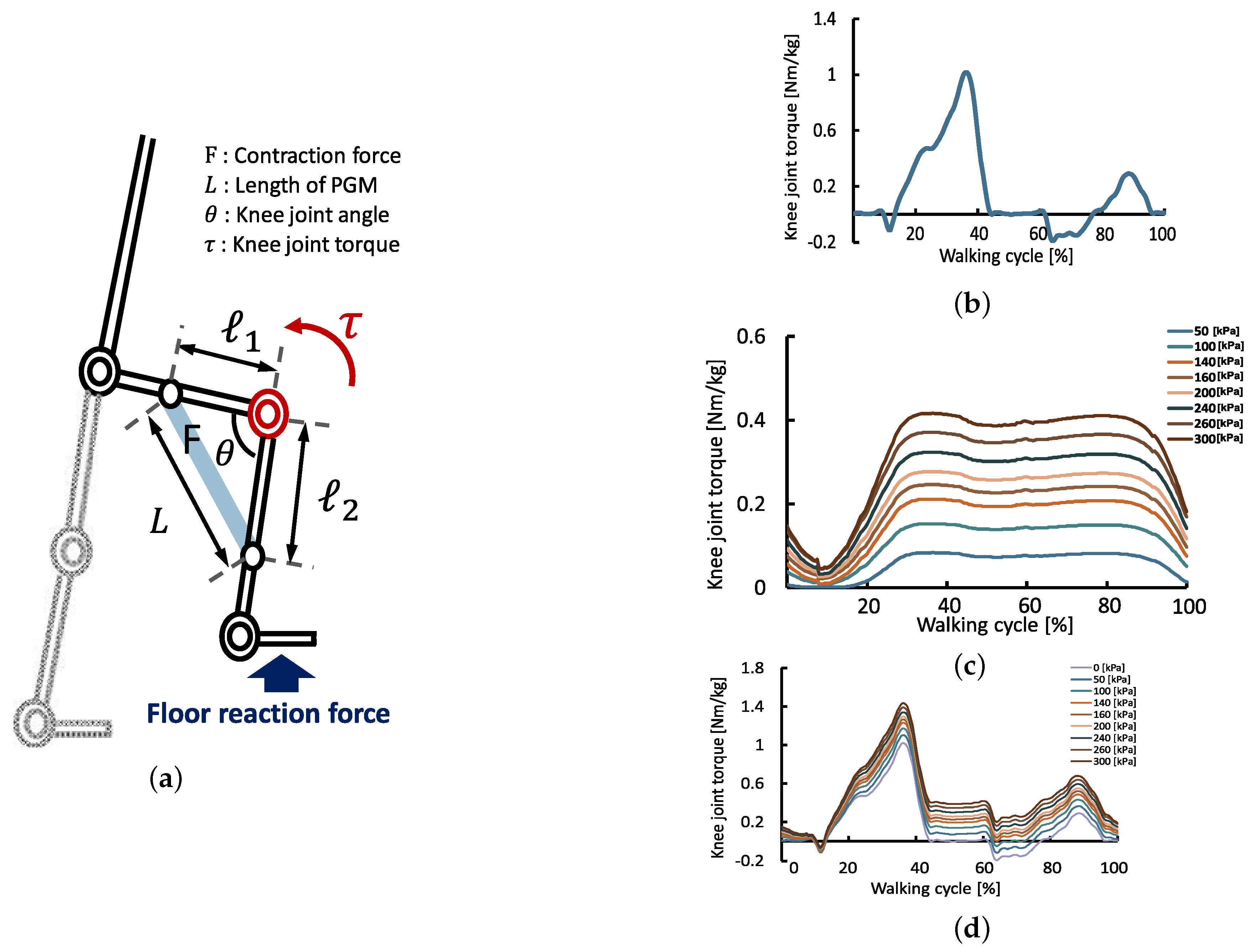
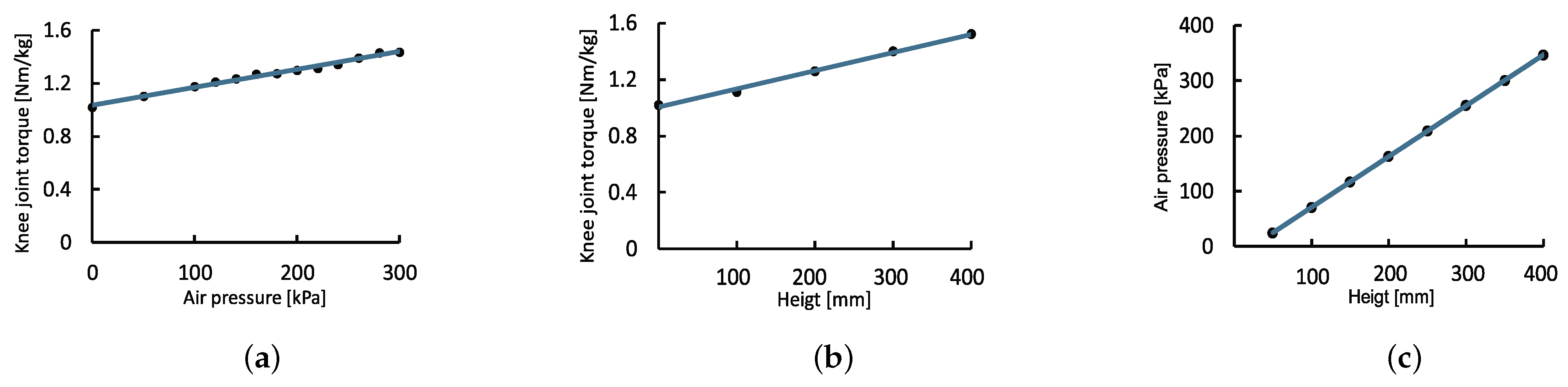
2.3.3. Force Characteristics
2.4. Motion Analysis
3. Experiments and Results
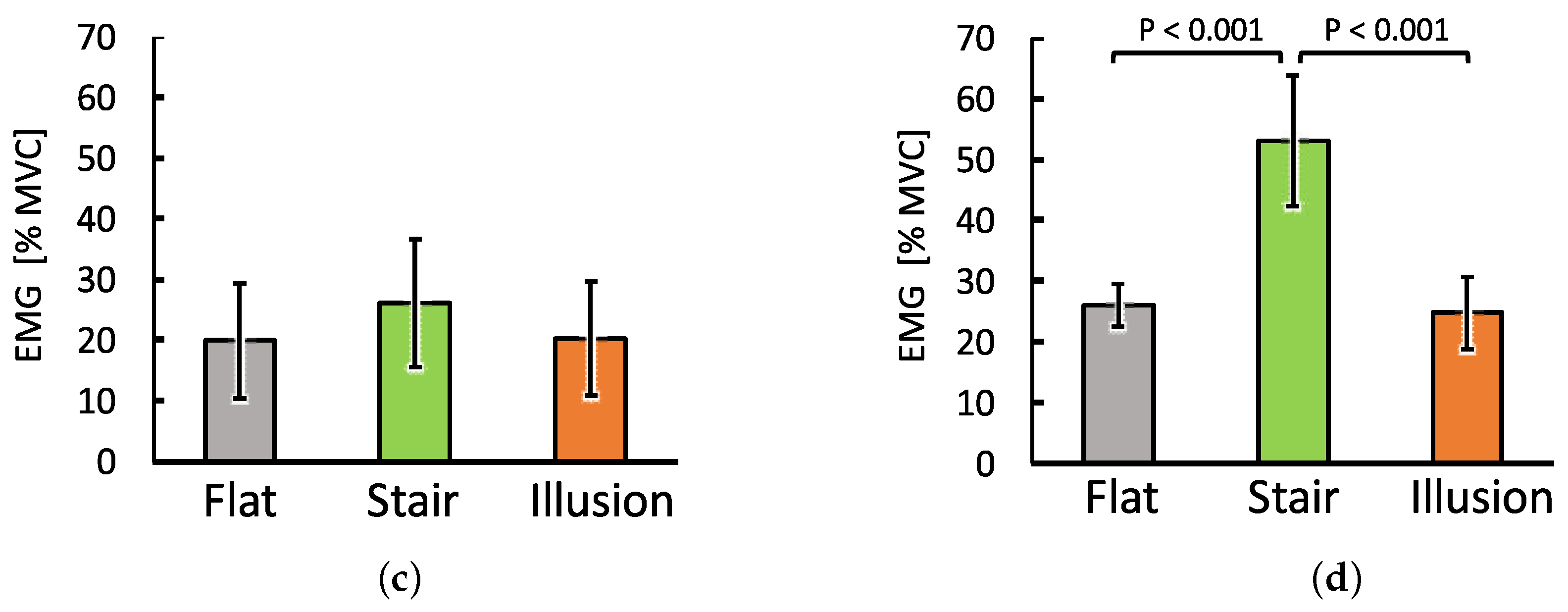
3.1. Experiment 1: EMG Measurements
3.1.1. Method
- Level walking without feedback;
- Stair-climbing without feedback (physical stair-climbing);
- Level walking with visual and force feedback (virtual stair-climbing).
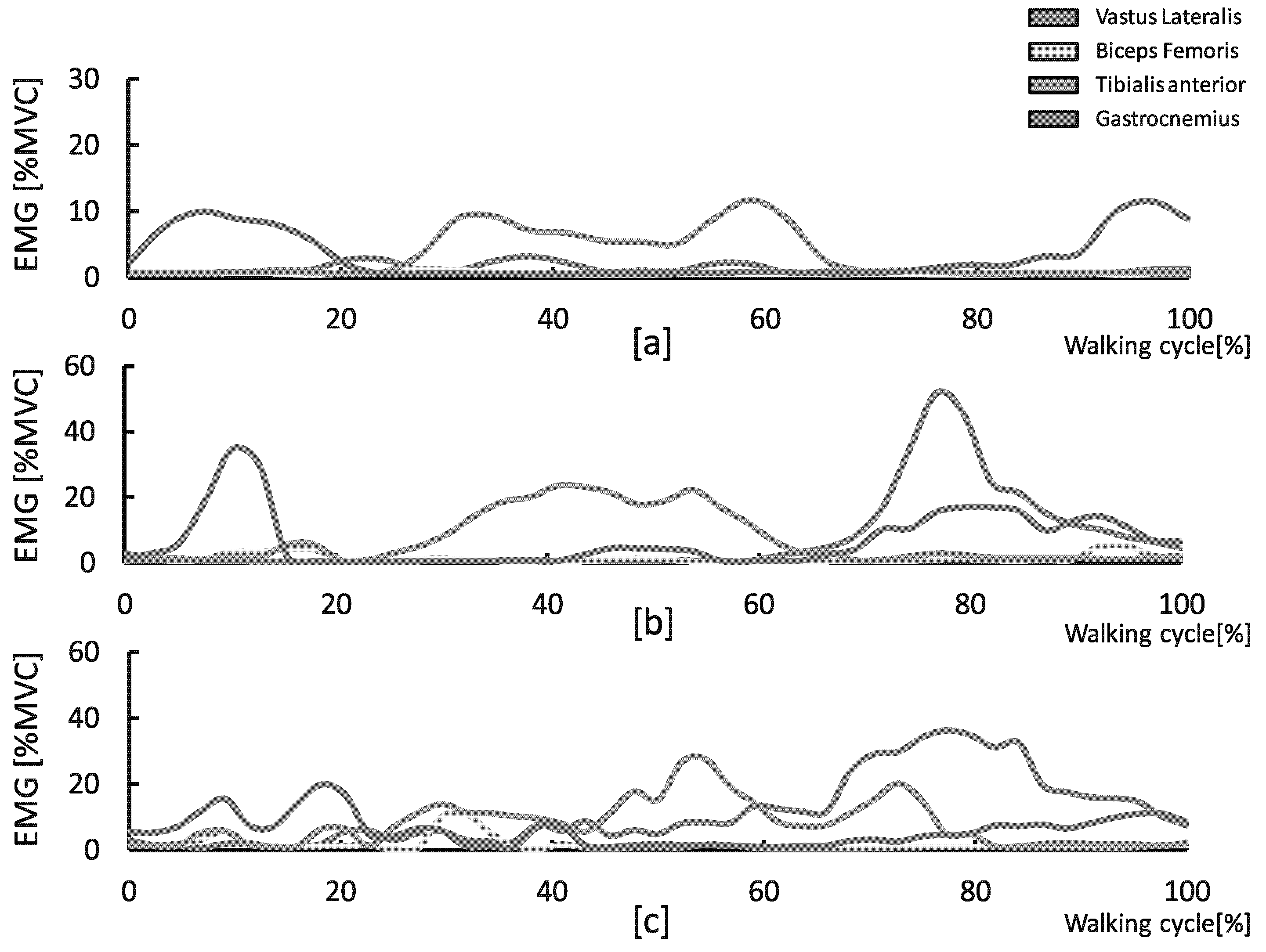
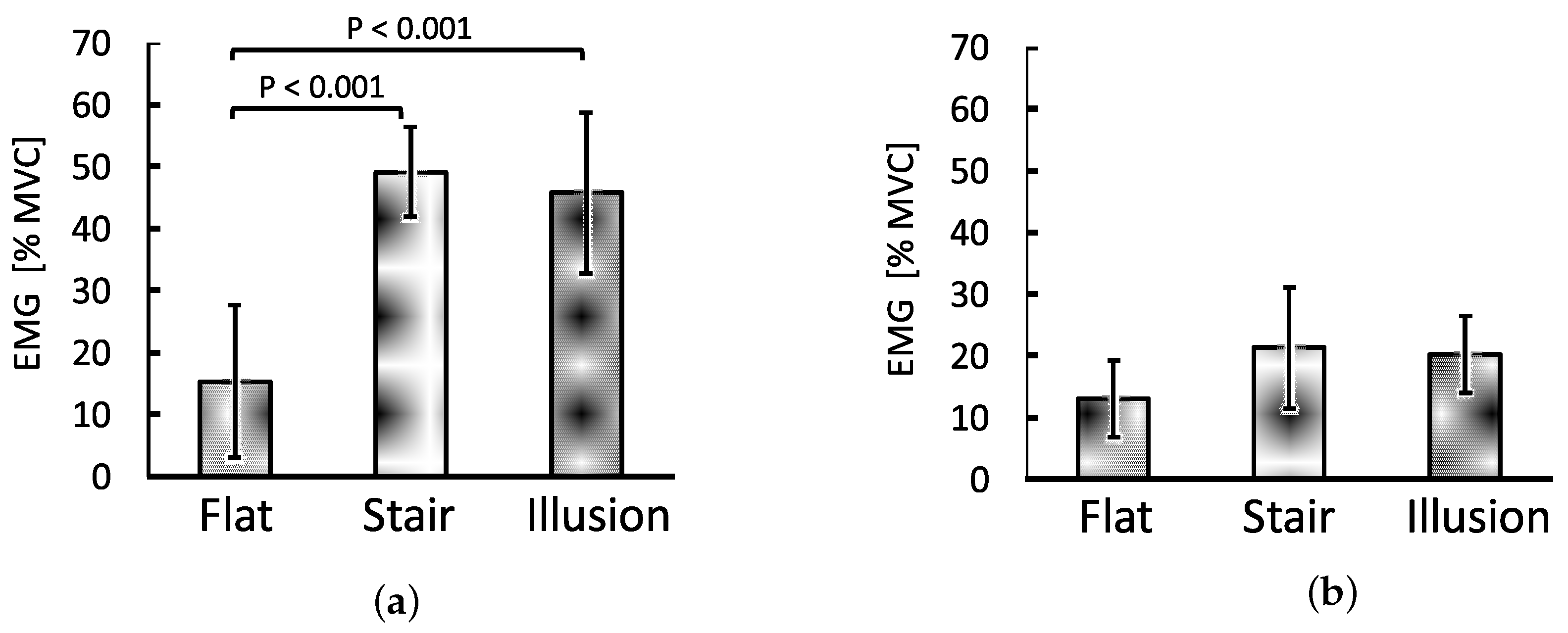
3.1.2. Results
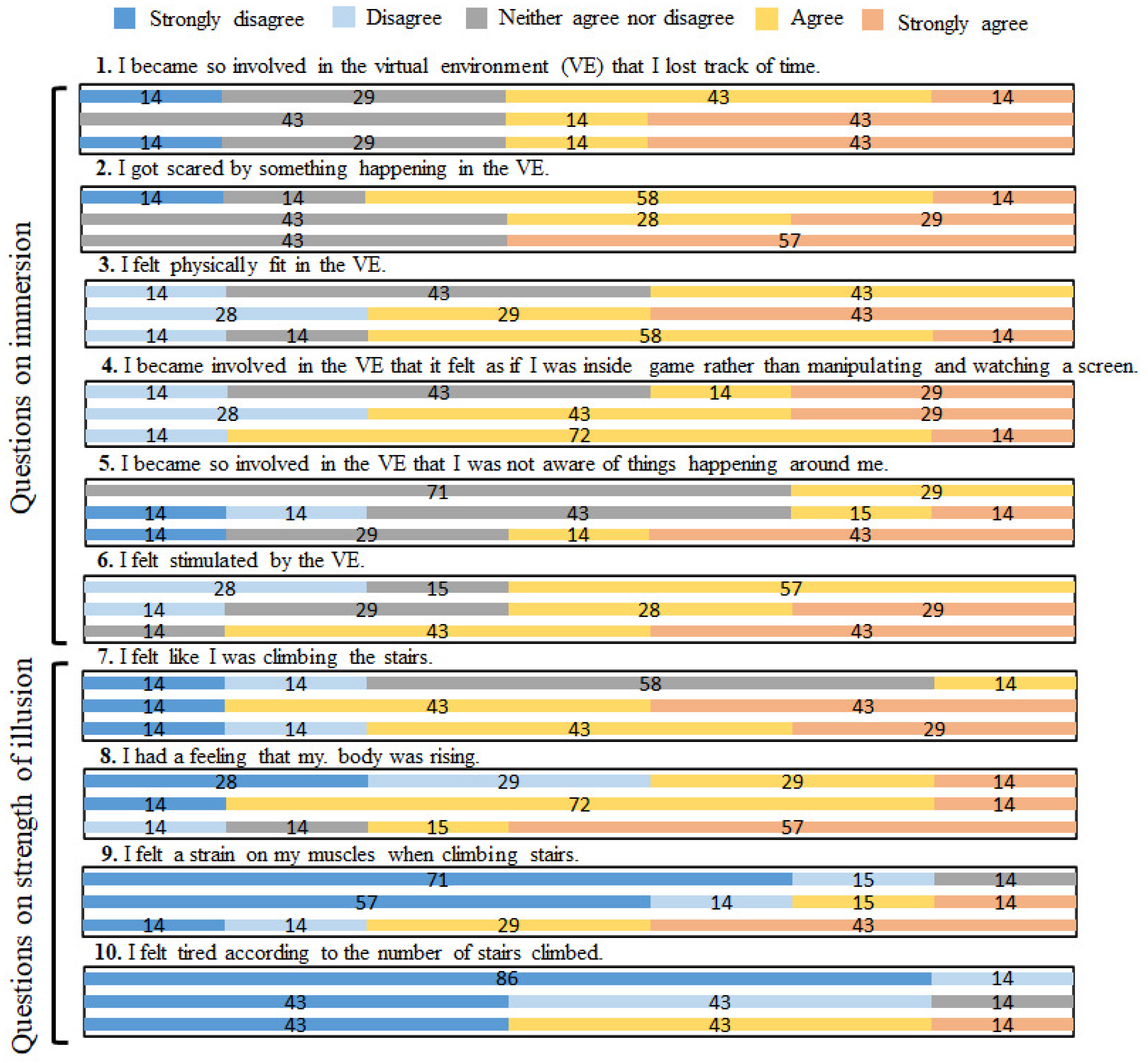
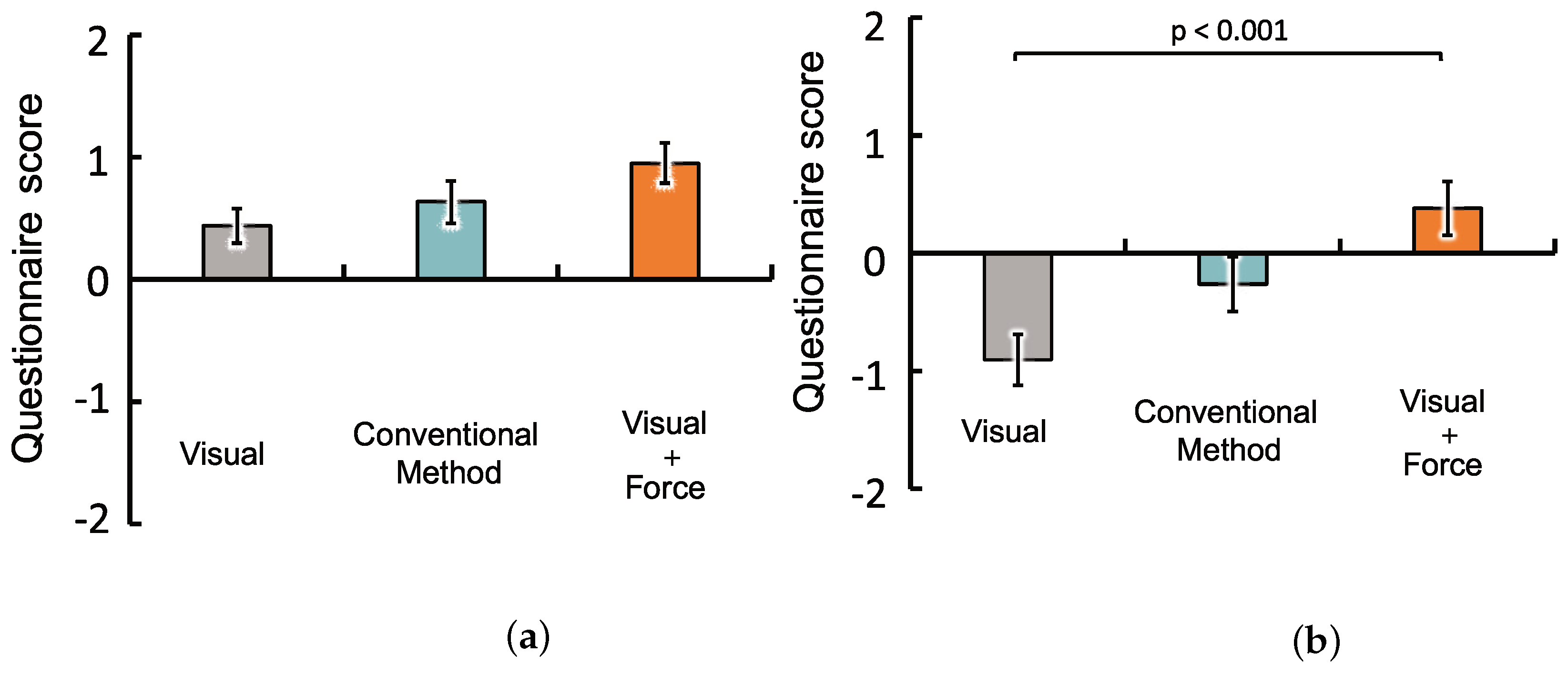
3.2. Experiment 2: Questionnaire Survey
3.2.1. Method
- Visual feedback;
- Visual and haptic feedback (conventional method [14]);
- Visual and force feedback (proposed method).
3.2.2. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Taub, E.; Uswatte, G.; Mark, V.; Morris, D. The learl1ed nonuse phenomenon: Implications for rehabilitation. Eura Medicophys 2006, 42, 241–255. [Google Scholar] [PubMed]
- Punt, D.T.; Cooper, L.; Hey, M.; Johnson, M.I. Neglect-like symptoms in complex regional pain syndrome: Learned nonuse by another name? Pain 2013, 154, 200–203. [Google Scholar] [CrossRef]
- Lotze, M.; Braun, C.; Birbaumer, N.; Anders, S.; Cohen, L.G. Motor learning elicited by voluntary drive. Brain 2003, 126, 866–872. [Google Scholar] [CrossRef]
- Lotze, M.; Cohen, L.G. Volition and imagery in neurorehabilitation. Cogn. Behav. Neurol. 2006, 19, 135–140. [Google Scholar] [CrossRef]
- Taylor, J.; Allen, G.M.; Butler, J.E.; Gandevia, S. Effect of contraction strength on responses in biceps brachii and adductor pollicis to transcranial magnetic stimulation. Exp. Brain Res. 1997, 117, 472–478. [Google Scholar] [CrossRef] [PubMed]
- Hasegaw, Y.; Kasai, T.; Kinoshita, H.; Yahagi, S. Modulation of a motor evoked response to transcranial magnetic stimulation by the activity level of the first dorsal interosseous muscle in humans when grasping a stationary object with different grip widths. Neurosci. Lett. 2001, 299, 1–4. [Google Scholar] [CrossRef]
- Moseley, G.L. Using visual illusion to reduce at-level neuropathic pain in paraplegia. Pain 2007, 130, 294–298. [Google Scholar] [CrossRef] [PubMed]
- Cakmak, T.; Hager, H. Cyberith Virtualizer: A Locomotion Device for Virtual Reality. In ACM SIGGRAPH 2014 Emerging Technologies (SIGGRAPH ’14); ACM: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Tsetserukou, D.; Sato, K.; Tachi, S. ExoInterfaces: Novel Exosceleton Haptic Interfaces for Virtual Reality, Augmented Sport and Rehabilitation. In Proceedings of the 1st Augmented Human International Conference, Megeve, France, 2–4 April 2010; p. 6. [Google Scholar]
- Ye, Y.S.; Chen, H.Y.; Chan, L. Pull-Ups: Enhancing Suspension Activities in Virtual Reality with Body-Scale Kinesthetic Force Feedback. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology, New Orleans, LA, USA, 20–23 October 2019; pp. 791–801. [Google Scholar]
- Matsumoto, K.; Ban, Y.; Narumi, T.; Yanase, Y.; Tanikawa, T.; Hirose, M. Unlimited corridor: Redirected walking techniques using visuo haptic interaction. In ACM SIGGRAPH 2016 Emerging Technologies; ACM: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Hollerbach, J.M. Locomotion interfaces. In Handbook of Virtual Environments: Design, Implementation, and Applications; Lawrence Erlbaum Asso: Mahwah, NJ, USA, 2002; pp. 239–254. [Google Scholar]
- Ishikawa, T.; Tsuji, T.; Kurita, Y. Wearable pseudo-haptic interaction by using electrical muscle stimulation. In Haptic Interaction; Springer: Berlin/Heidelberg, Germany, 2015; pp. 135–140. [Google Scholar]
- Nagao, R.; Matsumoto, K.; Narumi, T.; Tanikawa, T.; Hirose, M. Ascending and descending in virtual reality: Simple and safe system using passive haptics. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1584–1593. [Google Scholar] [CrossRef] [PubMed]
- Riener, R.; Rabuffetti, M.; Frigo, C. Stair ascent and descent at different inclinations. Gait Posture 2002, 15, 32–44. [Google Scholar] [CrossRef]
- Sasaki, D.; Noritsugu, T.; Takaiwa, M. Development of Wearable Master-slave Training Device for Upper Limb Constructed with Pneumatic Artificial Muscles. In Proceedings of the 8th JFPS International Symposium on Fluid Power, Okinawa, Japan, 25–28 October 2011. [Google Scholar]
- Sasaki, D.; Noritsugu, T.; Yamamoto, H.; Takaiwa, M. Development of power assist glove using pneumatic artificial rubber muscle. J. Robot. Soc. Jpn. 2006, 24, 640–646. [Google Scholar] [CrossRef]
- Noritsugu, T.; Sasaki, D.; Kameda, M.; Fukunaga, A.; Takaiwa, M. Wearable power assist device for standing up motion using pneumatic rubber artificial muscles. J. Robot. Mechatron. 2007, 19, 619–628. [Google Scholar] [CrossRef]
- McFadyen, B.J.; Winter, D.A. An integrated biomechanical analysis of normal stair ascent and descent. J. Biomech. 1988, 21, 733–744. [Google Scholar] [CrossRef]
- Tcha-Tokey, K.; Christmann, O.; Loup-Escande, E.; Richir, S. Proposition and validation of a questionnaire to measure the user experience in immersive virtual environments. Int. J. Virtual Real. 2016, 16, 33–48. [Google Scholar] [CrossRef]
- Wise, A.K.; Fallon, J.B. The effect of muscle contraction on kinaesthesia. In Sensorimotor Control of Movement and Posture; Springer: Berlin/Heidelberg, Germany, 2002; pp. 87–94. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | ||||
|---|---|---|---|---|
| Condition | Difference | Lower | Upper | pValue |
| B-A | 0.195 | −0.829 | 1.22 | 0.879 |
| C-A | 0.514 | −0.510 | 1.54 | 0.423 |
| C-B | 0.319 | −0.705 | 1.34 | 0.711 |
| (b) | ||||
| Condition | Difference | Lower | Upper | pValue |
| B-A | 0.964 | −0.411 | 2.34 | 0.201 |
| C-A | 1.93 | 0.552 | 3.30 | 0.00579 * |
| C-B | 0.964 | −0.411 | 2.34 | 0.201 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Okumura, T.; Kurita, Y. Cross-Modal Effect of Presenting Visual and Force Feedback That Create the Illusion of Stair-Climbing. Appl. Sci. 2021, 11, 2987. https://doi.org/10.3390/app11072987
Okumura T, Kurita Y. Cross-Modal Effect of Presenting Visual and Force Feedback That Create the Illusion of Stair-Climbing. Applied Sciences. 2021; 11(7):2987. https://doi.org/10.3390/app11072987
Chicago/Turabian StyleOkumura, Takumi, and Yuichi Kurita. 2021. "Cross-Modal Effect of Presenting Visual and Force Feedback That Create the Illusion of Stair-Climbing" Applied Sciences 11, no. 7: 2987. https://doi.org/10.3390/app11072987
APA StyleOkumura, T., & Kurita, Y. (2021). Cross-Modal Effect of Presenting Visual and Force Feedback That Create the Illusion of Stair-Climbing. Applied Sciences, 11(7), 2987. https://doi.org/10.3390/app11072987